
Hyperspectral Infrared Atmospheric Sounder (HIRAS) Atmospheric Sounding System

 ,
,
Abstract
1. Introduction
2. HIRAS Measurement and Channel Selection
2.1. HIRAS Measurement Data
2.2. Channel Selection
- Channels pre-screening. According to the forward model error, instrument error and brightness temperature perturbations (see Figure 2b), the channels are black-listed when the forward model error and measurement error are larger than the thresholds defined or the channels are affected by O3 and other interference sources (see Figure 2a). After pre-screening, 1304 channels were used for the next selection. The total information entropy for temperature and water vapor were 34.6 and 32.6, respectively.
- Temperature channel selection. Only channels sensitive to temperature were used for the iteration of temperature information entropy to ensure that a maximum amount of temperature information was derived from the CO2 channels rather than from the H2O channels. A set of 67 channels, approximately 52.3% of the total information entropy for temperature, was chosen.
- Water vapor channel selection. A similar channel selection was performed with the remaining channels in pre-screened channels by the iteration of water vapor information entropy. A total of 244 channels (including the 67 temperature channels) were chosen. The information entropy utilization for temperature and water vapor reached 84.4% and 72.4%, respectively.
- Surface temperature channel selection. The surface temperature was an additional variable in our algorithm. In order to allow for the inversion of surface temperature, 30 additional window channels on weak absorption lines were added.
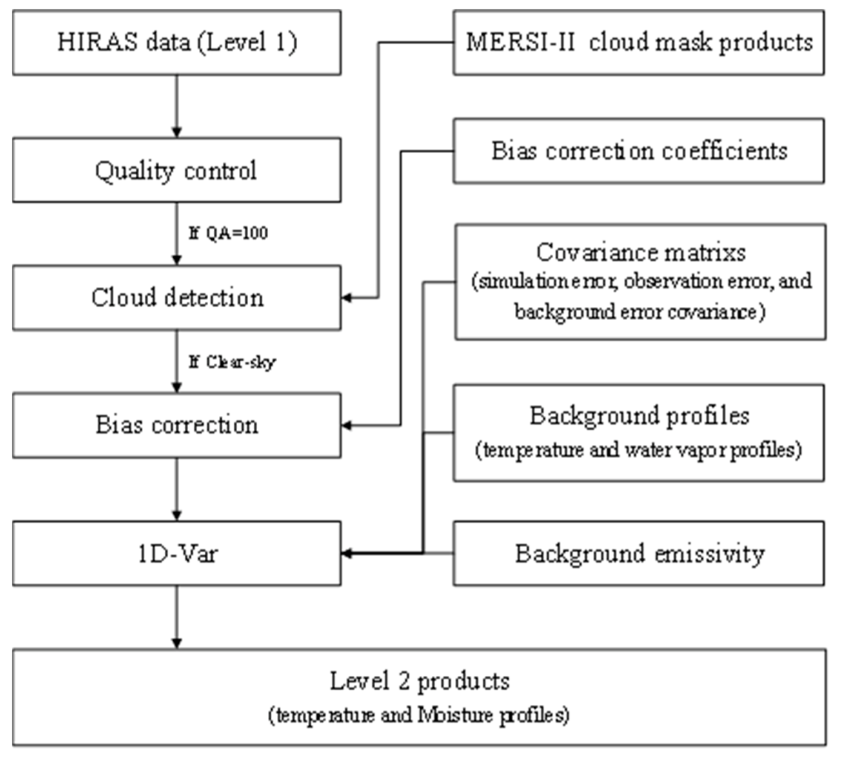
3. HIRAS Atmospheric Sounding System (HASS)
- A preliminary input quality control and the acquisition of various lookup tables;
- A cloud detection module using MERSI-II visible and infrared observations;
- An angle-dependence bias correction module for measurement spectrum;
- The infrared physical retrieval using 1D-Var.
3.1. Forward Model
3.2. Lookup Tables
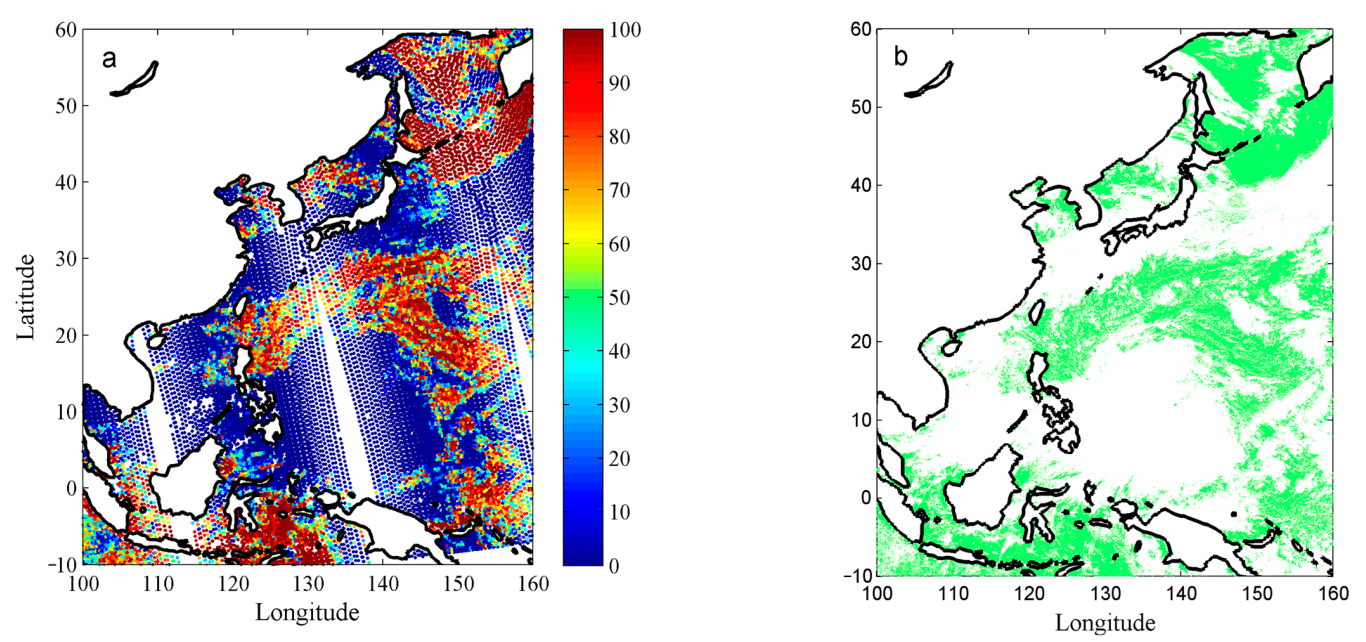
3.3. Cloud Detection
- Collocating the geographical coordinates of HIRAS and MERSI-II.
- Calculating the clear fraction of each HIRAS pixel according to the ratio of clear MERSI-II pixels in all of the MERSI-II pixels located in this HIRAS pixel.
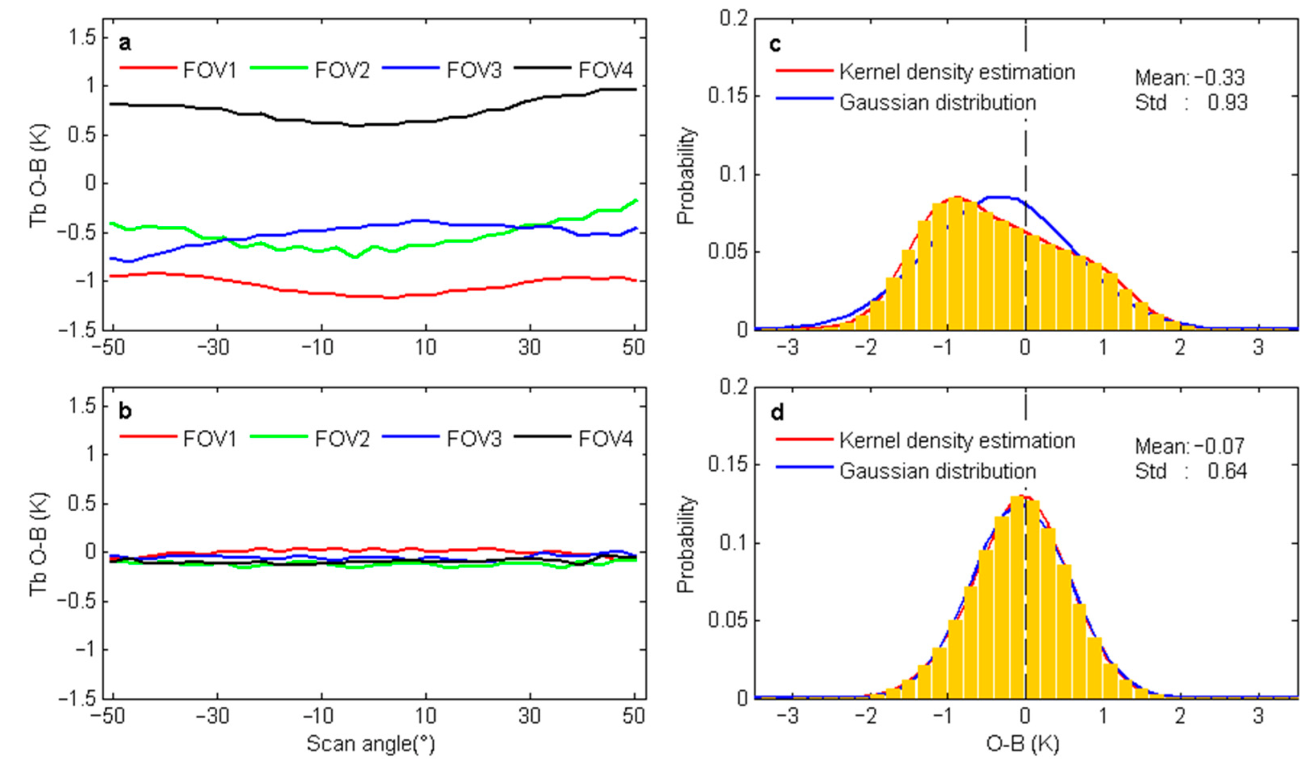
3.4. Bias Correction
3.5. 1D-Var Algorithm
4. HIRAS Atmospheric Sounding System (HASS)
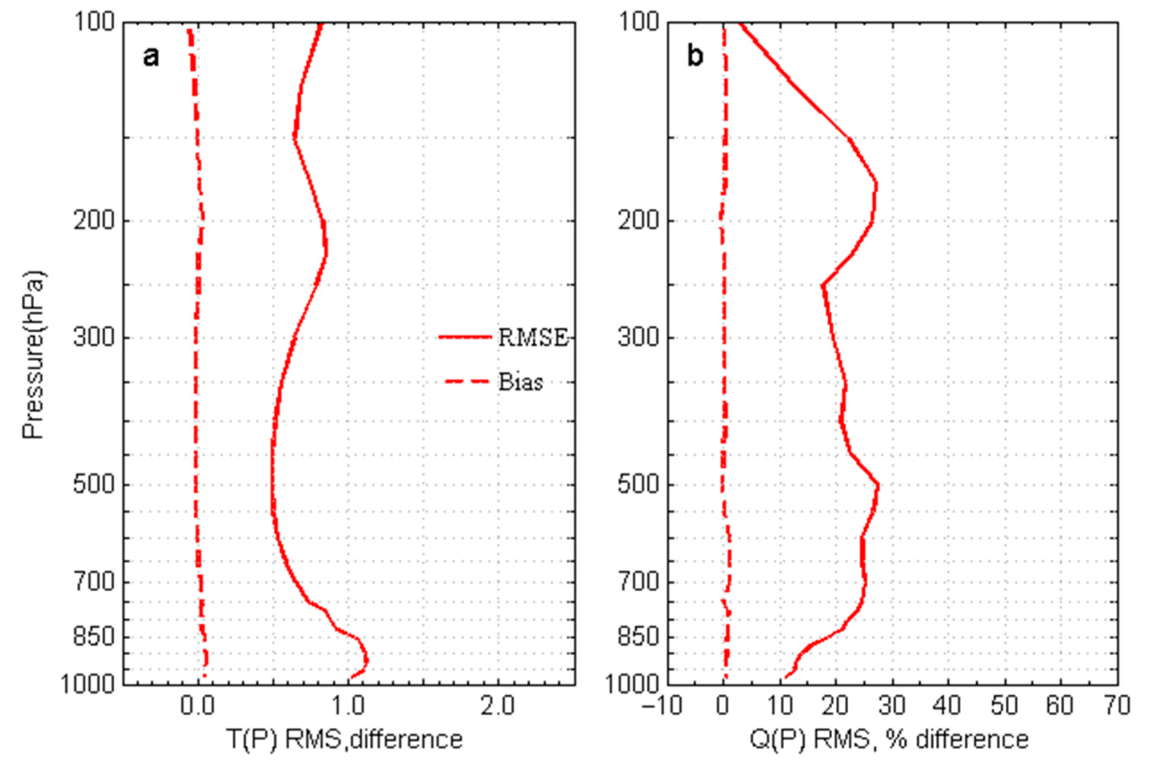
4.1. Validation with ERA5 Reanalysis Data
4.2. Validation with GNOS RO Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Güldner, J.; Spänkuch, D. Remote Sensing of the Thermodynamic State of the Atmospheric Boundary Layer by Ground-Based Microwave Radiometry. J. Atmos. Ocean. Technol. 2001, 18, 925–933. [Google Scholar] [CrossRef]
- Rodgers, C.D. Series on Atmospheric Oceanic and Planetary Physics. In Inverse Methods for Atmospheric Sounding–Theory and Practice, 2nd ed.; World Science: Singapore, 2000. [Google Scholar]
- Susskind, J.; Barnet, C.; Blaisdell, J.; Iredell, L.; Keita, F.; Kouvaris, L. Early results from AIRS/AMSU/HSB. In Proceedings of the SPIE Annual Meeting, San Diego, CA, USA, 3 August 2003. [Google Scholar] [CrossRef]
- Goldberg, M.; Qu, Y.; McMillin, L.; Wolf, W.; Zhou, L.; Divarkarla, M. Real time operational products from AIRS. Opt. Remote Sens. 2003. [Google Scholar] [CrossRef]
- Liu, Q.H.; Weng, F.Z. A microwave polarimetric two-stream radiative transfer model. J. Atmos. Sci. 2002, 59, 2396–2402. [Google Scholar] [CrossRef]
- Seemann, S.W.; Li, J.; Menzel, W.P.; Gumley, L.E. Operational Retrieval of Atmospheric Temperature, Moisture, and Ozone from MODIS Infrared Radiances. J. Appl. Meteor. 2003, 42, 1072–1091. [Google Scholar] [CrossRef]
- Zhang, L.; Qiu, C.; Huang, J. A three-dimensional satellite retrieval method for atmospheric temperature and moisture profiles. Adv. Atmos. Sci. 2008, 25, 897–904. [Google Scholar] [CrossRef]
- Milstein, A.B.; Blackwell, W.J. Neural network temperature and moisture retrieval algorithm validation for AIRS/AMSU and CrIS/ATMS. J. Geophys. Res. Atmos. 2016, 121, 1414–1430. [Google Scholar] [CrossRef]
- Thompson, O.E.; Eom, J.K.; Wagenhofer, J.R. On the Resolution of Temperature Profile Finestructure by the NOAA Satellite Vertical Temperature Profile Radiometer. Mon. Weather Rev. 1976, 104, 117–126. [Google Scholar] [CrossRef][Green Version]
- High Resolution Infrared Radiation Sounder/Mod 2 (HIRS/2). Available online: https://ntrs.nasa.gov/api/citations/19800024547/downloads/19800024547.pdf (accessed on 22 June 2021).
- Aumann, H.H.; Chahine, M.T.; Gautier, C.; Goldberg, M.D.; Kalnay, E.; McMillin, L.M.; Susskind, J. AIRS/AMSU/HSB on the aqua mission: Design, science objectives, data products, and processing systems. IEEE Trans. Geosci. Remote Sens. 2003, 41, 253–264. [Google Scholar] [CrossRef]
- Klaes, K.D.; Cohen, M.; Buhler, Y.; Schlussel, P.; Munro, R.; Luntama, J.P.; Schmetz, J. An introduction to the EUMETSAT Polar System. Bull. Am. Meteorol. Soc. 2007, 88, 1085–1096. [Google Scholar] [CrossRef]
- Smith, A.; Atkinson, N.; Bell, W.; Doherty, A. An initial assessment of observations from the Suomi-NPP satellite: Data from the Cross-track Infrared Sounder (CrIS). Atmos. Sci. Lett. 2015, 16, 260–266. [Google Scholar] [CrossRef]
- High Resolution GLAS on the MCIDAS. Available online: https://ntrs.nasa.gov/citations/19840013994 (accessed on 22 June 2021).
- Li, J.; Wolf, W.; Menzel, W.; Zhang, W.; Huang, H.-L.; Achtor, T. Global Soundings of the Atmosphere from ATOVS Measurements: The Algorithm and Validation. J. Appl. Meteorol. 2000, 39, 1248–1268. [Google Scholar] [CrossRef]
- Susskind, J.; Barnet, C.; Blaisdell, J.; Iredell, L.; Keita, F.; Kouvaris, L.; Chahine, M. Accuracy of geophysical parameters derived from Atmospheric Infrared Sounder/Advanced Microwave Sounding Unit as a function of fractional cloud cover. J. Geophys. Res. -Atmos. 2006, 111, D09S17. [Google Scholar] [CrossRef]
- Gambacorta, A.; Nalli, N.R.; Tan, C.; Iturbide-Sanchez, F.; Wilson, M.; Zhang, K.; Goldberg, M. Status of the NPP and J1 NOAA Unique Combined Atmospheric Processing System (NUCAPS): Recent algorithm enhancements geared toward validation and near real time users applications. In Proceedings of the AGU Fall Meeting, San Francisco, CA, USA, 12–16 December 2016. [Google Scholar]
- Rosenkranz, P.W. Retrieval of water vapor from AMSU-A and AMSU-B measurements. In Proceedings of the IEEE 2000 International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 24–28 July 2000. [Google Scholar] [CrossRef]
- Goldberg, M.; Barnet, C.; Wolf, W.; Zhou, L.; Divakarla, M. Distributed real-time operational products from AIRS. In Proceedings of the SPIE Atmospheric and Environmental Remote Sensing Data Processing and Utilization: An End-to-End System Perspective, Denver, CO, USA, 4–6 August 2004. [Google Scholar] [CrossRef]
- Chahine, M. Remote Sounding of Cloudy Atmospheres. I. The Single Cloud Layer. J. Atmos. Sci. 1974, 31, 233–243. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, L.; Di, X.; Xu, Z. Recent progress of Fengyun meteorology satellites. China J. Space Sci. 2018, 38, 788–796. [Google Scholar]
- Lee, L.; Zhang, P.; Qi, C.L.; Hu, X.Q.; Gu, M.J. HIRAS noise performance improvement based on principal component analysis. Appl. Opt. 2019, 58, 5506–5515. [Google Scholar] [CrossRef]
- Qi, C.; Yang, Z.; Zhang, P.; Wu, C.; Hu, X.; Xu, H.; Shao, C. High Spectral Infrared Atmospheric Sounder (HIRAS): System Overview and On-Orbit Performance Assessment. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4335–4352. [Google Scholar] [CrossRef]
- Wu, C.; Qi, C.; Hu, X.; Gu, M.; Yang, T.; Xu, H.; Zhang, P. FY-3D HIRAS Radiometric Calibration and Accuracy Assessment. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3965–3976. [Google Scholar] [CrossRef]
- Han, Y.; Revercomb, H.; Cromp, M.; Gu, D.G.; Johnson, D.; Mooney, D.; Zavyalov, V. Suomi NPP CrIS measurements, sensor data record algorithm, calibration and validation activities, and record data quality. J. Geophys. Res. Atmos. 2013, 118, 12734–12748. [Google Scholar] [CrossRef]
- Rodgers, C.D. Information content and optimisation of high spectral resolution remote measurements. Adv. Space Res. 1998, 21, 361–367. [Google Scholar] [CrossRef]
- Rabier, F.; Fourrié, N.; Chafäi, D.; Prunet, P. Channel selection methods for Infrared Atmospheric Sounding Interferometer radiances. Q. J. R. Meteorol. Soc. 2002, 128, 1011–1027. [Google Scholar] [CrossRef]
- Collard, A.D. Selection of IASI channels for use in numerical weather prediction. Q. J. R. Meteorol. Soc. 2007, 133, 1977–1991. [Google Scholar] [CrossRef]
- Weng, F.; Liu, Q. Satellite Data Assimilation in Numerical Weather Prediction Models. Part I: Forward Radiative Transfer and Jacobian Modeling in Cloudy Atmospheres. J. Atmos. Sci. 2003, 60, 2633–2646. [Google Scholar] [CrossRef]
- Weng, F.Z. Advances in radiative transfer modeling in support of satellite data assimilation. J. Atmos. Sci. 2007, 64, 3799–3807. [Google Scholar] [CrossRef]
- McMillin, L.; Fleming, H. Atmospheric transmittance of an absorbing gas—A computationally fast and accurate transmittance model for absorbing gases with constant mixing ratios in inhomogeneous atmospheres. Appl. Opt. 1976, 15, 358. [Google Scholar] [CrossRef]
- Weng, F.; Yu, X.; Duan, Y.; Yang, J.; Wang, J. Advanced Radiative Transfer Modeling System (ARMS): A New-Generation Satellite Observation Operator Developed for Numerical Weather Prediction and Remote Sensing Applications. Adv. Atmos. Sci. 2020, 37, 131–136. [Google Scholar] [CrossRef]
- Boukabara, S.A.; Garrett, K.; Chen, W.C.; Iturbide-Sanchez, F.; Grassotti, C.; Kongoli, C.; Meng, H. MiRS: An All-Weather 1DVAR Satellite Data Assimilation and Retrieval System. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3249–3272. [Google Scholar] [CrossRef]
- Wu, X.; Smith, W.L. Emissivity of rough sea surface for 8 13 m: Modeling and verification. Appl. Opt. 1997, 36, 2609–2619. [Google Scholar] [CrossRef]
- Crow, W. Estimating Model and Observation Error Covariance Information for Land Data Assimilation Systems. In Land Surface Observation, Modeling and Data Assimilation; Liang, S., Ed.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 171–205. [Google Scholar]
- Geer, A.J.; Migliorini, S.; Matricardi, M. All-sky assimilation of infrared radiances sensitive to mid- and upper-tropospheric moisture and cloud. Atmos. Meas. Tech. 2019, 12, 4903–4929. [Google Scholar] [CrossRef]
- Lin, L.; Zou, X.L.; Weng, F.Z. Combining CrIS double CO2 bands for detecting clouds located in different layers of the atmosphere. J. Geophys. Res. Atmos. 2017, 122, 1811–1827. [Google Scholar] [CrossRef]
- Qu, J.; Yan, J.; Xxue, J.; Guo, X. Research on the cloud detection model of FY3D/MERSI and EOS/MODIS based on deep learning. J. Meteorol. Environ. 2019, 35, 87–93. [Google Scholar]
- Kopp, T.J.; Thomas, W.; Heidinger, A.K.; Botambekov, D.; Frey, R.A.; Hutchison, K.D.; Reed, B. The VIIRS Cloud Mask: Progress in the first year of S-NPP toward a common cloud detection scheme. J. Geophys. Res. Atmos. 2014, 119, 2441–2456. [Google Scholar] [CrossRef]
- Weng, F.; Zou, X.; Wang, X.; Yang, S.; Goldberg, M.D. Introduction to Suomi national polar-orbiting partnership advanced technology microwave sounder for numerical weather prediction and tropical cyclone applications. J. Geophys. Res. Atmos. 2012, 117. [Google Scholar] [CrossRef]
- Saunders, R.W.; Blackmore, T.A.; Candy, B.; Francis, P.N.; Hewison, T.J. Monitoring Satellite Radiance Biases Using NWP Models. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1124–1138. [Google Scholar] [CrossRef]
- Weng, F.Z.; Zhu, T.; Yan, B.H. Satellite data assimilation in numerical weather prediction models. Part II: Uses of rain-affected radiances from microwave observations for hurricane vortex analysis. J. Atmos. Sci. 2007, 64, 3910–3925. [Google Scholar] [CrossRef]
- Liu, Q.H.; Weng, F.Z. One-dimensional variational retrieval algorithm of temperature, water vapor, and cloud water profiles from Advanced Microwave Sounding Unit (AMSU). IEEE Trans. Geosci. Remote Sens. 2005, 43, 1087–1095. [Google Scholar]
- Han, Y.; Weng, F.Z. Remote Sensing of Tropical Cyclone Thermal Structure from Satellite Microwave Sounding Instruments: Impacts of Optimal Channel Selection on Retrievals. J. Meteorol. Res. 2018, 32, 804–818. [Google Scholar] [CrossRef]
- Hu, H.; Weng, F.Z.; Han, Y.; Duan, Y.H. Remote Sensing of Tropical Cyclone Thermal Structure from Satellite Microwave Sounding Instruments: Impacts of Background Profiles on Retrievals. J. Meteorol. Res. 2019, 33, 89–103. [Google Scholar] [CrossRef]
- Palmer, P.I.; Barnett, J.J.; Eyre, J.R.; Healy, S.B. A nonlinear optimal, estimation inverse method for radio occultation measurements of temperature, humidity, and surface pressure. J. Geophys. Res. Atmos. 2000, 105, 17513–17526. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, H.; Liang, H.; Lou, Y.; Cai, Y.; Cao, Y.; Liu, W. On the suitability of ERA5 in hourly GPS precipitable water vapor retrieval over China. J. Geod. 2019, 93, 1897–1909. [Google Scholar] [CrossRef]
- Nalli, N.; Gambacorta, A.; Liu, Q.; Barnet, C.; Tan, C.; Iturbide-Sanchez, F.; Morris, V. Validation of Atmospheric Profile Retrievals From the SNPP NOAA-Unique Combined Atmospheric Processing System. Part 1: Temperature and Moisture. IEEE Trans. Geosci. Remote Sens. 2017, 56, 180–190. [Google Scholar] [CrossRef]
- Susskind, J.; Blaisdell, J.M.; Iredell, L.; Keita, F. Improved Temperature Sounding and Quality Control Methodology Using AIRS/AMSU Data: The AIRS Science Team Version 5 Retrieval Algorithm. IEEE Trans. Geosci. Remote Sens. 2011, 49, 883–907. [Google Scholar] [CrossRef]
- Smith, W.L.; Weisz, E.; Kireev, S.V.; Zhou, D.K.; Li, Z.L.; Borbas, E.E. Dual-Regression Retrieval Algorithm for Real-Time Processing of Satellite Ultraspectral Radiances. J. Appl. Meteorol. Climatol. 2012, 51, 1455–1476. [Google Scholar] [CrossRef]
- Zhang, K.; Wu, C.Q.; Li, J. Retrieval of Atmospheric Temperature and Moisture Vertical Profiles from Satellite Advanced Infrared Sounder Radiances with a New Regularization Parameter Selecting Method. J. Meteorol. Res. 2016, 30, 356–370. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Spectral Range (cm−1) | Spectral Resolution (cm−1) | No. of Channels | ||
|---|---|---|---|---|---|
| FSR | NSR | FSR | NSR | ||
| LW | 650–1135 | 0.625 | 0.625 | 777 | 777 |
| MW | 1210–1750 | 0.625 | 1.25 | 865 | 433 |
| SW | 2155–2550 | 0.625 | 2.5 | 633 | 159 |
| Layer Range | |||
|---|---|---|---|
| Surface to 600 hPa | 600 hPa to 300 hPa | 300 hPa to 100 hPa | |
| Temperature (K) | 1.5 | 1.0 | 1.3 |
| Moisture (%) | 22.3 | 33.2 | 38.5 |
| Layer Range | ||||
|---|---|---|---|---|
| Surface to 600 hPa | 600 hPa to 300 hPa | 300 hPa to 100 hPa | ||
| Temperature (K) | FOV1 | 1.5 | 1.0 | 1.2 |
| FOV2 | 1.3 | 1.0 | 1.3 | |
| FOV3 | 1.3 | 0.9 | 1.2 | |
| FOV4 | 1.6 | 1.0 | 1.3 | |
| Moisture (%) | FOV1 | 22.6 | 33.5 | 38.6 |
| FOV2 | 21.1 | 31.8 | 37.7 | |
| FOV3 | 21.2 | 31.9 | 38.2 | |
| FOV4 | 23.8 | 34.7 | 39.0 | |
| Layer Range | ||||
|---|---|---|---|---|
| Surface to 600 hPa | 600 hPa to 300 hPa | 300 hPa to 100 hPa | ||
| Temperature (K) | 0°–10°N | 1.2 | 0.9 | 1.1 |
| 10°–20°N | 1.3 | 1.0 | 1.1 | |
| 20°–30°N | 1.4 | 1.0 | 1.2 | |
| 30°–40°N | 1.5 | 1.0 | 1.4 | |
| Moisture (%) | 0°–10°N | 15.8 | 26.8 | 35.4 |
| 10°–20°N | 20.4 | 35.9 | 38.4 | |
| 20°–30°N | 23.7 | 36.0 | 40.2 | |
| 30°–40°N | 26.7 | 33.0 | 39.5 | |
| Layer Range | |||
|---|---|---|---|
| Surface to 600 hPa | 600 hPa to 300 hPa | 300 hPa to 100 hPa | |
| Temperature (K) | 1.7 | 1.8 | 1.9 |
| Moisture (%) | 28.2 | 53.6 | 43.7 |
| Layer Range | |||
|---|---|---|---|
| Surface to 600 hPa | 600 hPa to 300 hPa | 300 hPa to 100 hPa | |
| Temperature (K) | 0.9 | 0.5 | 0.8 |
| Moisture (%) | 19.9 | 23.1 | 18.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Hu, H.; Fang, C.; Wang, S.; Xun, S.; He, B.; Wu, W.; Huo, Y. Hyperspectral Infrared Atmospheric Sounder (HIRAS) Atmospheric Sounding System. Remote Sens. 2022, 14, 3882. https://doi.org/10.3390/rs14163882
Li S, Hu H, Fang C, Wang S, Xun S, He B, Wu W, Huo Y. Hyperspectral Infrared Atmospheric Sounder (HIRAS) Atmospheric Sounding System. Remote Sensing. 2022; 14(16):3882. https://doi.org/10.3390/rs14163882
Chicago/Turabian StyleLi, Shuqun, Hao Hu, Chenggege Fang, Sichen Wang, Shangpei Xun, Binfang He, Wenyu Wu, and Yanfeng Huo. 2022. "Hyperspectral Infrared Atmospheric Sounder (HIRAS) Atmospheric Sounding System" Remote Sensing 14, no. 16: 3882. https://doi.org/10.3390/rs14163882
APA StyleLi, S., Hu, H., Fang, C., Wang, S., Xun, S., He, B., Wu, W., & Huo, Y. (2022). Hyperspectral Infrared Atmospheric Sounder (HIRAS) Atmospheric Sounding System. Remote Sensing, 14(16), 3882. https://doi.org/10.3390/rs14163882