
Wide-Area GNSS Corrections for Precise Positioning and Navigation in Agriculture

 , , , , , ,
, , , , , , 
 , , , ,
, , , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The WARTK Model
3. External Assessment of WARTK Corrections
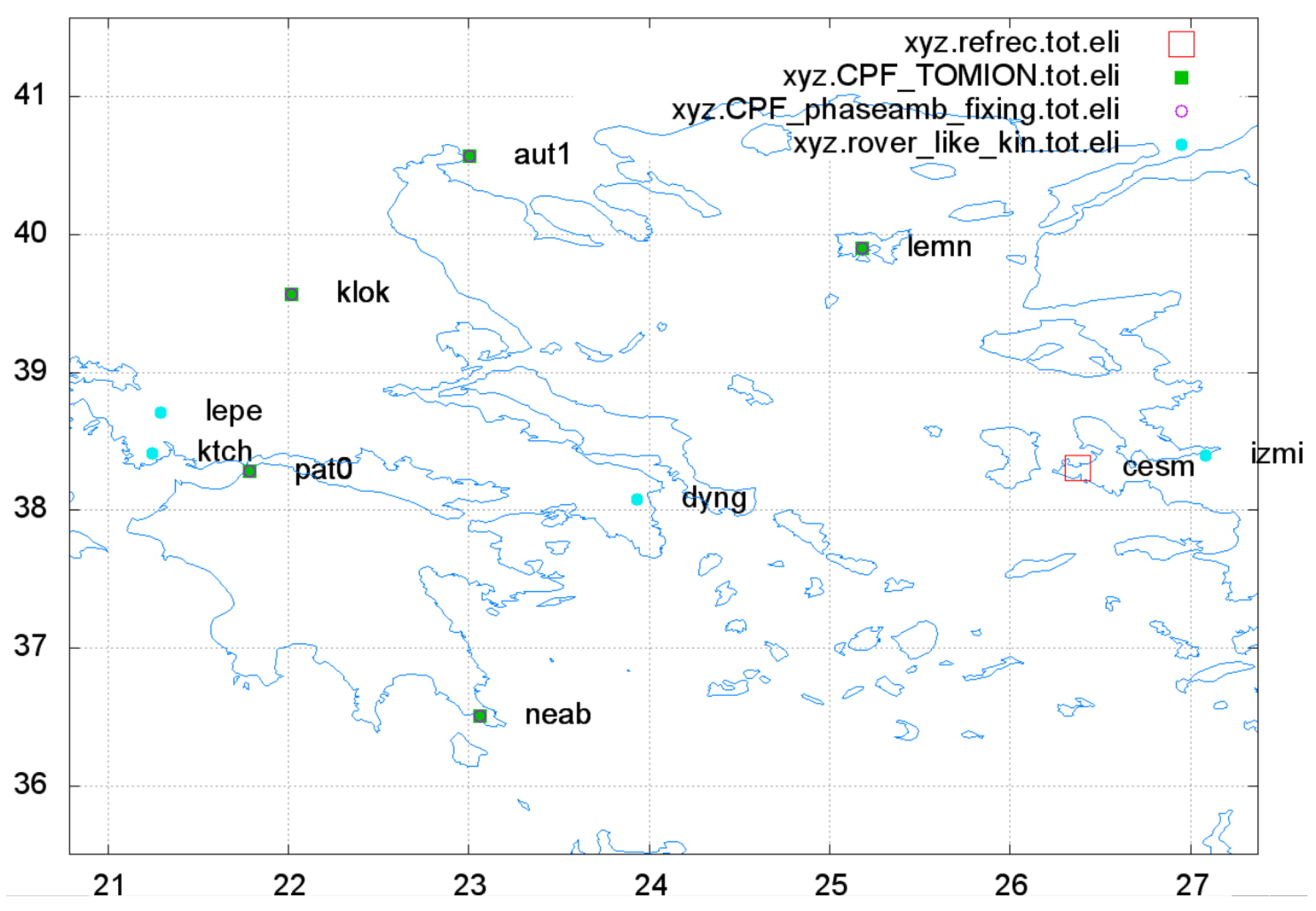
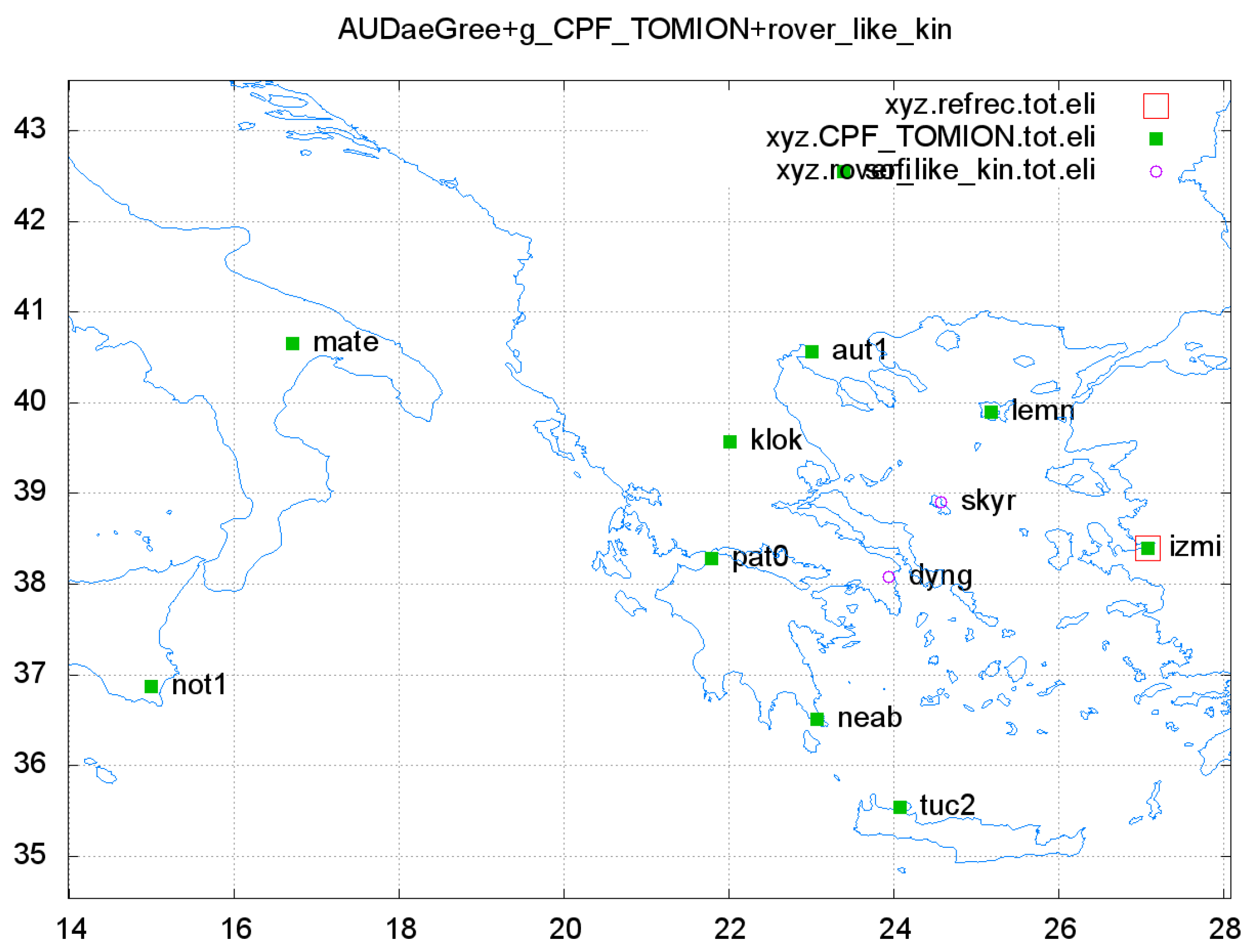
3.1. Data Set
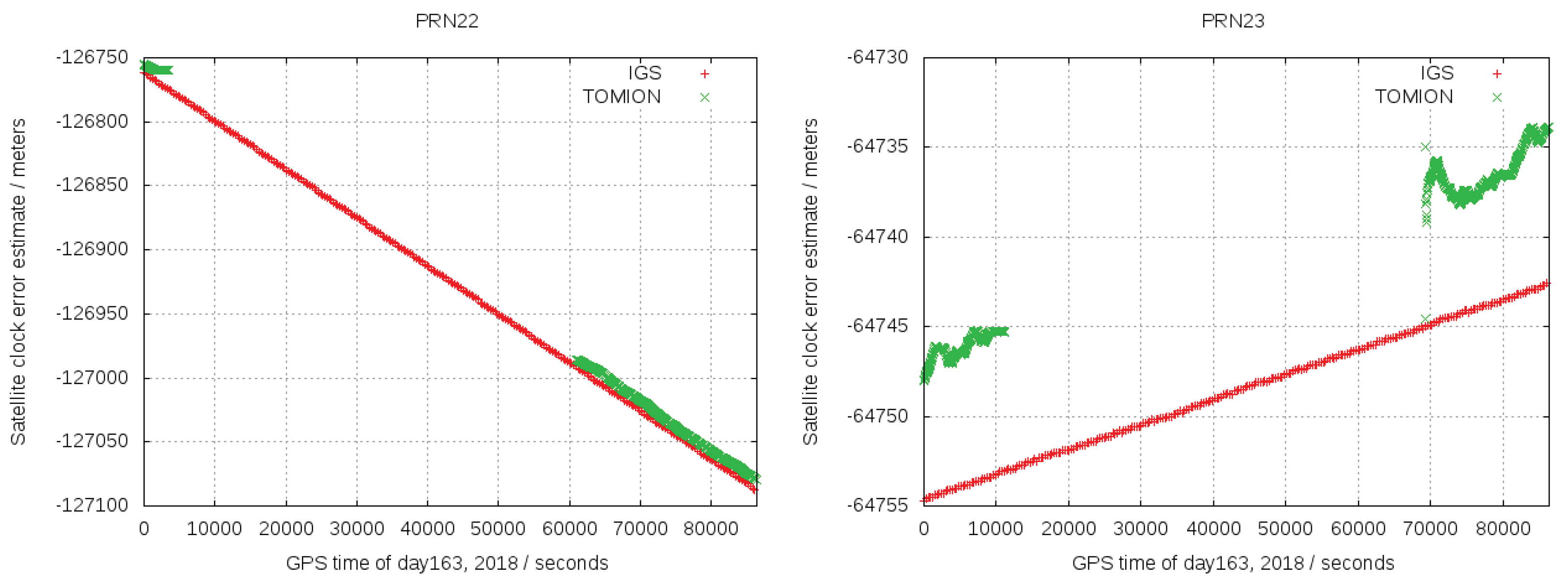
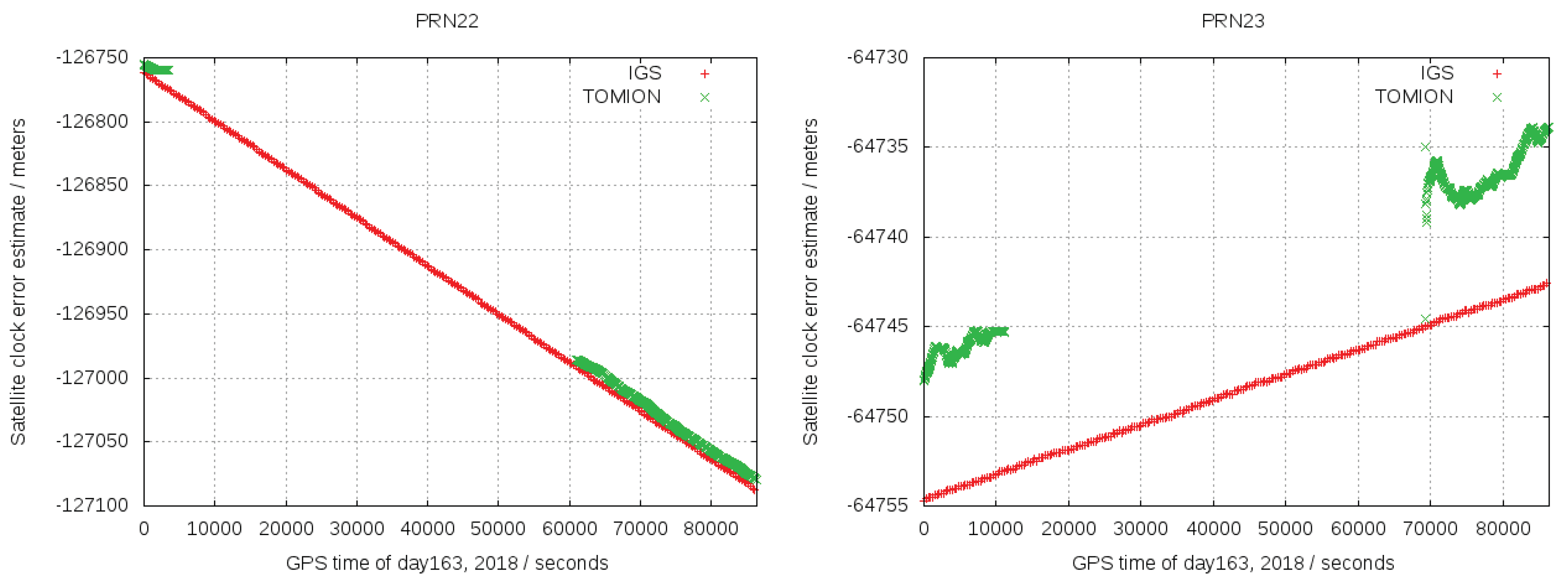
3.2. Satellite Clock Assessment
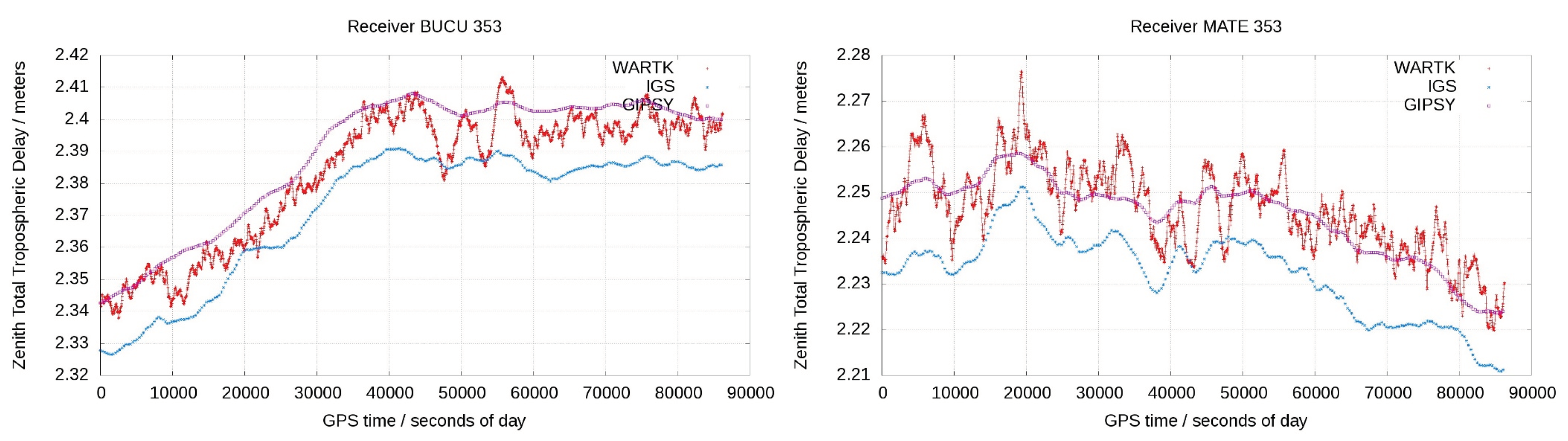
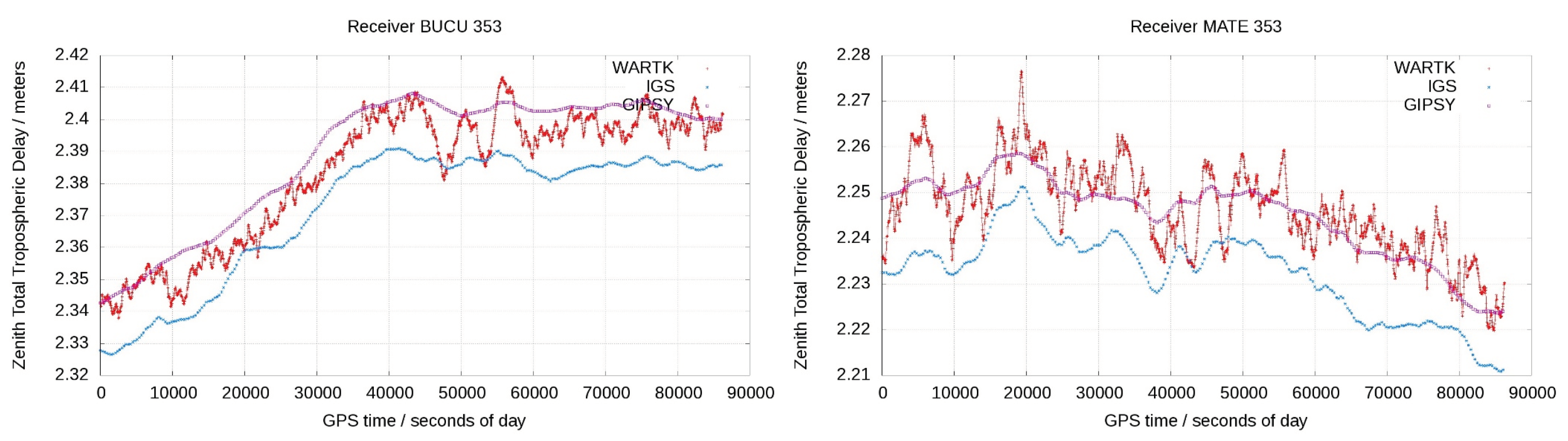
3.3. Zenith Tropospheric Delay Assessment
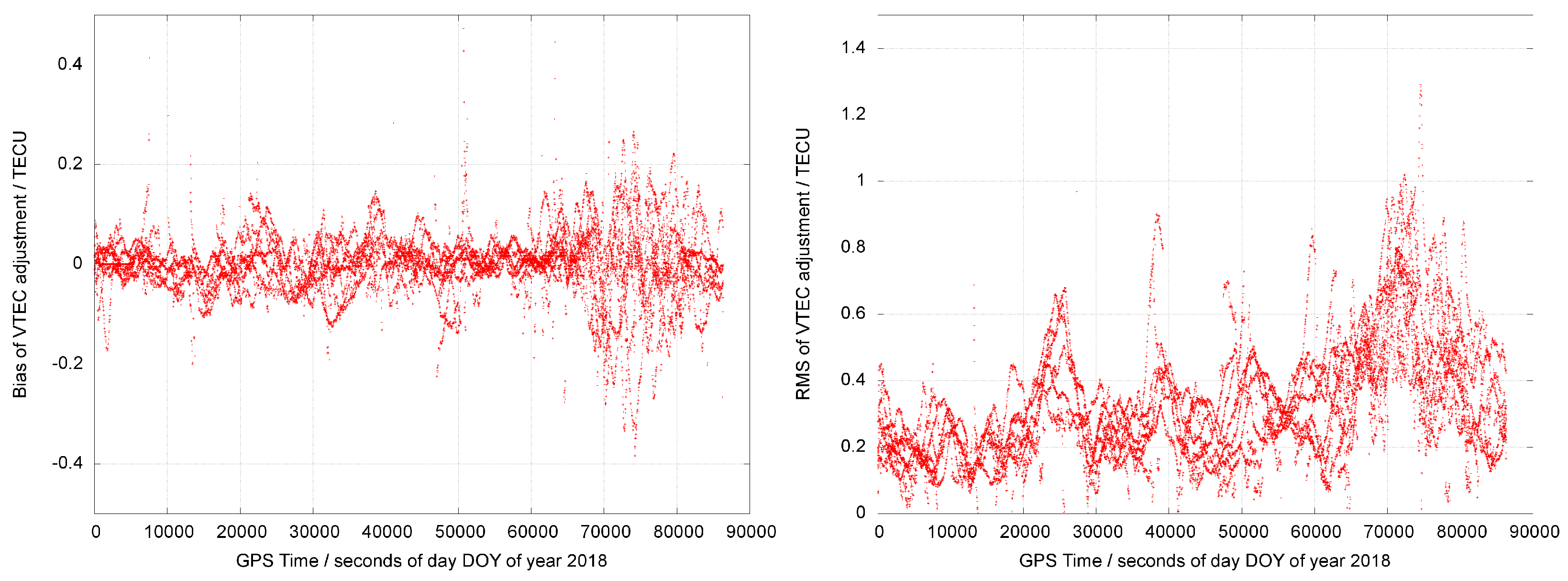
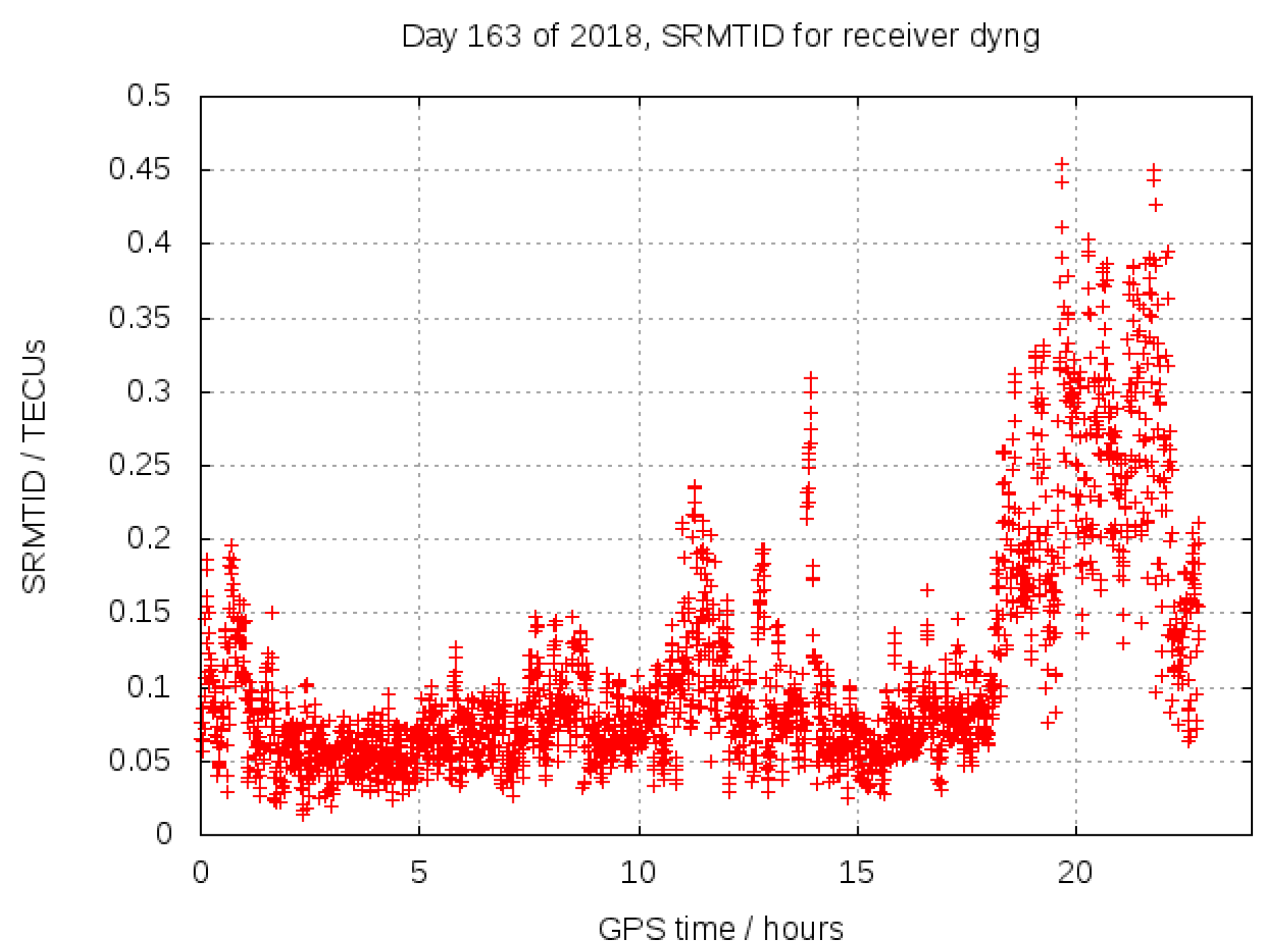
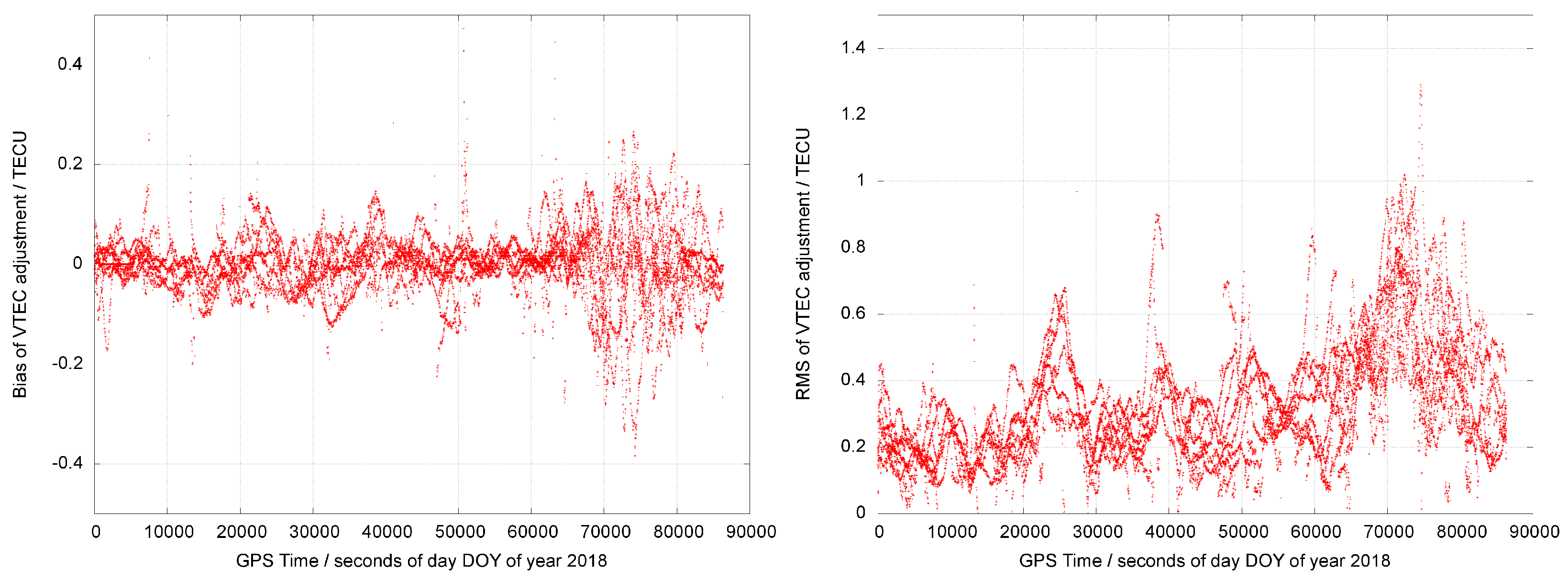
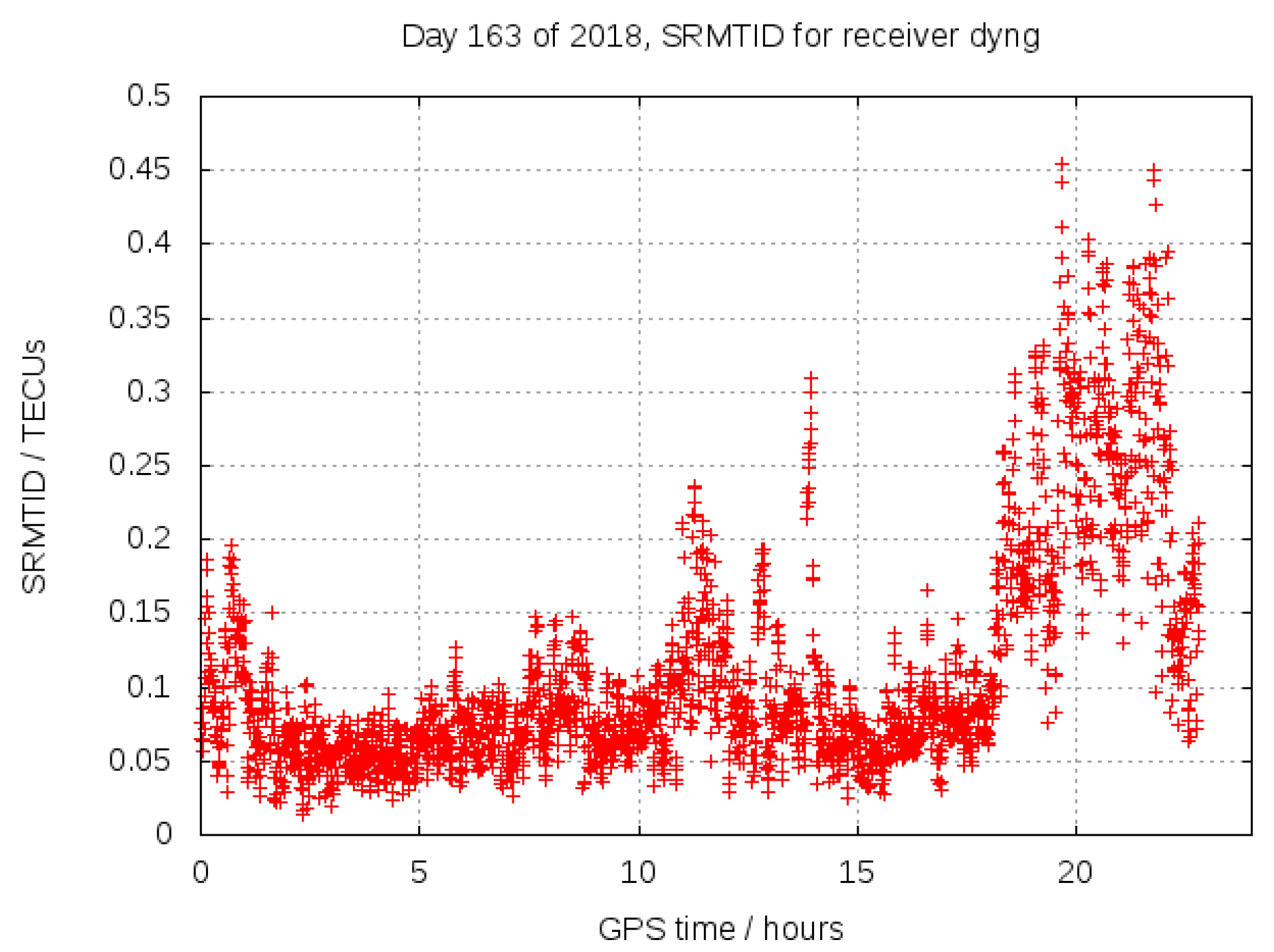
3.4. Ionospheric Corrections Assessment
4. Impact of WARTK Corrections in Navigation of Roving GNSS Users
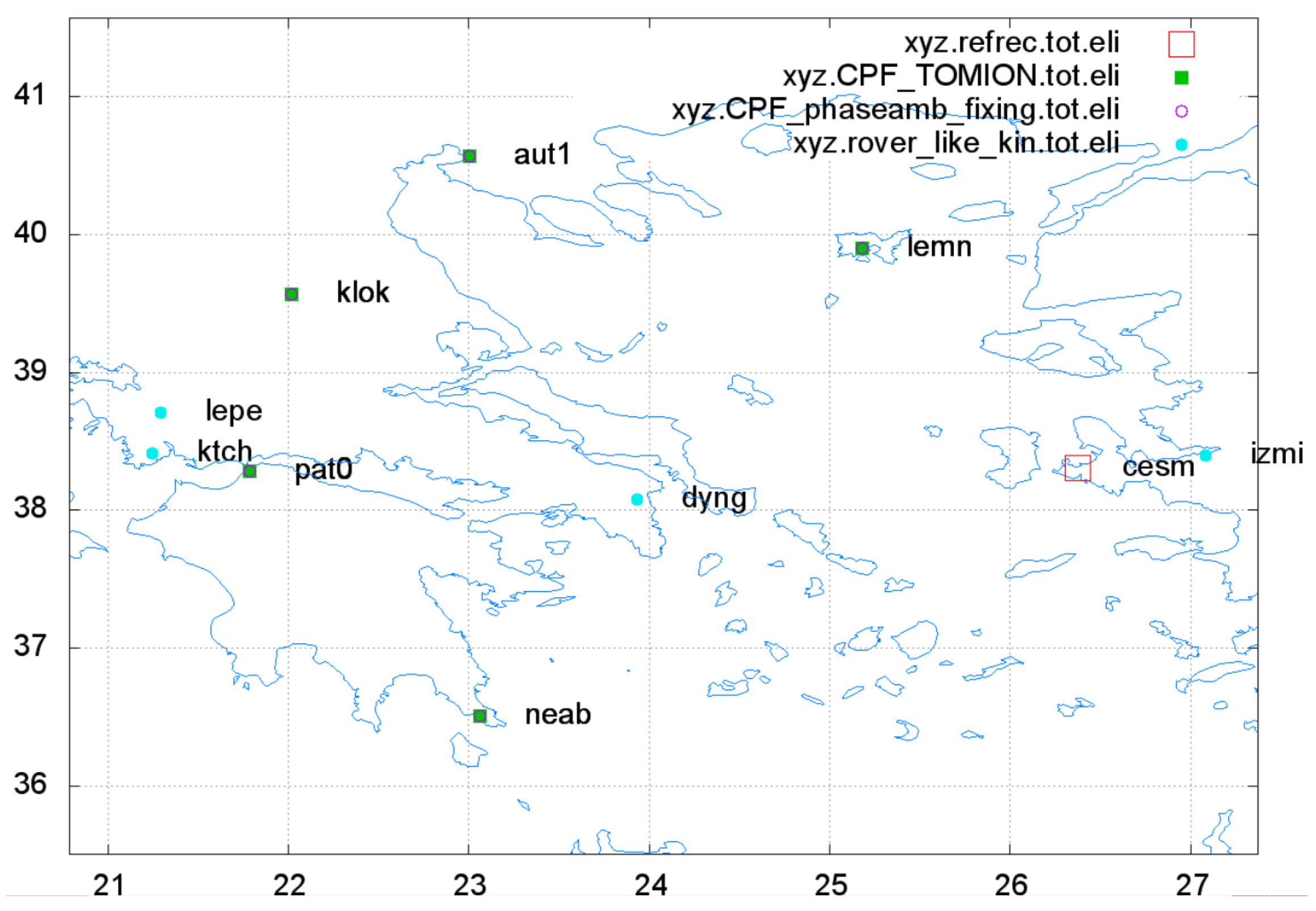
4.1. First Scenario: Static Rovers in NOANET
4.1.1. Wide-Area Networks of Receivers
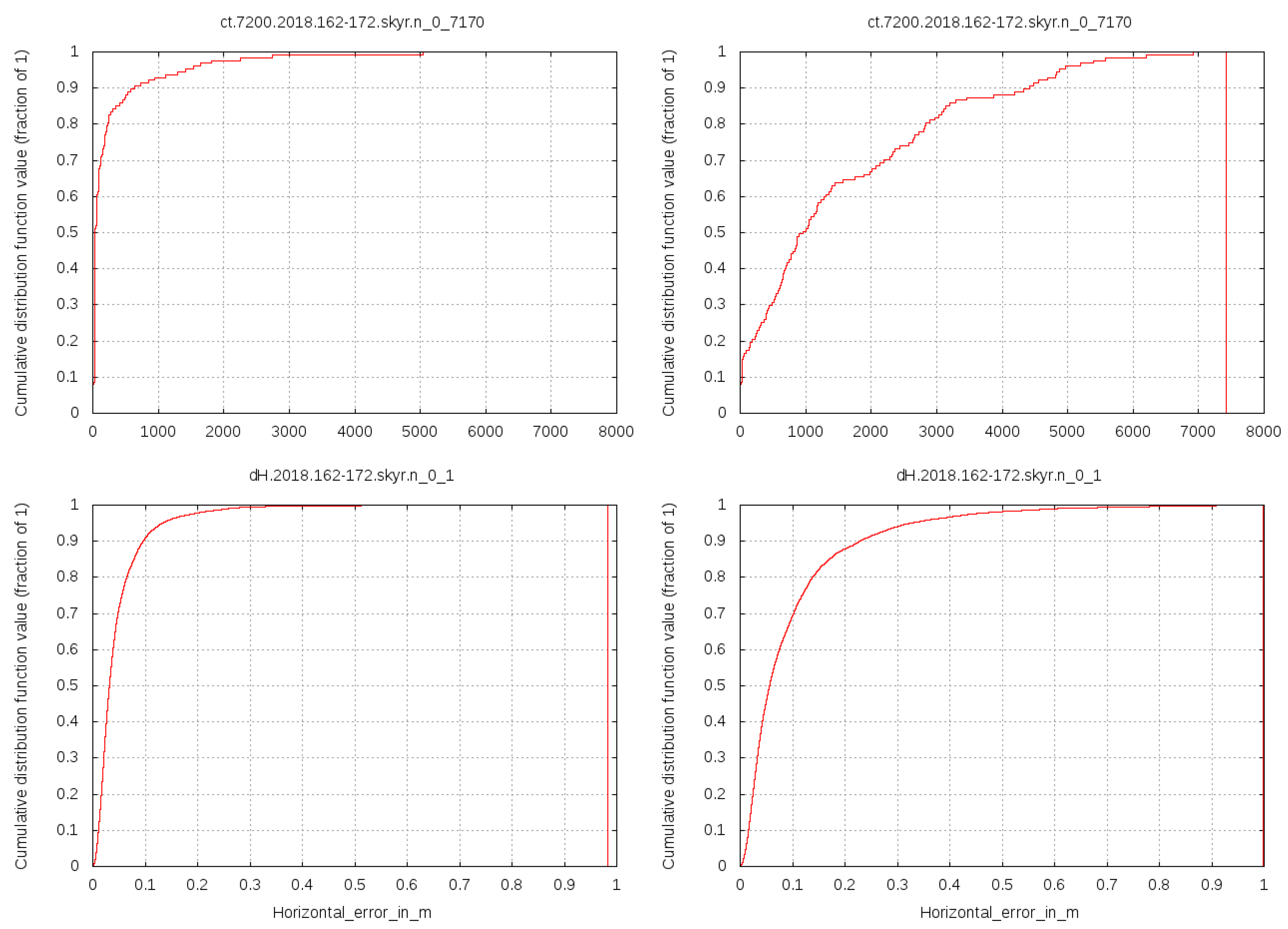
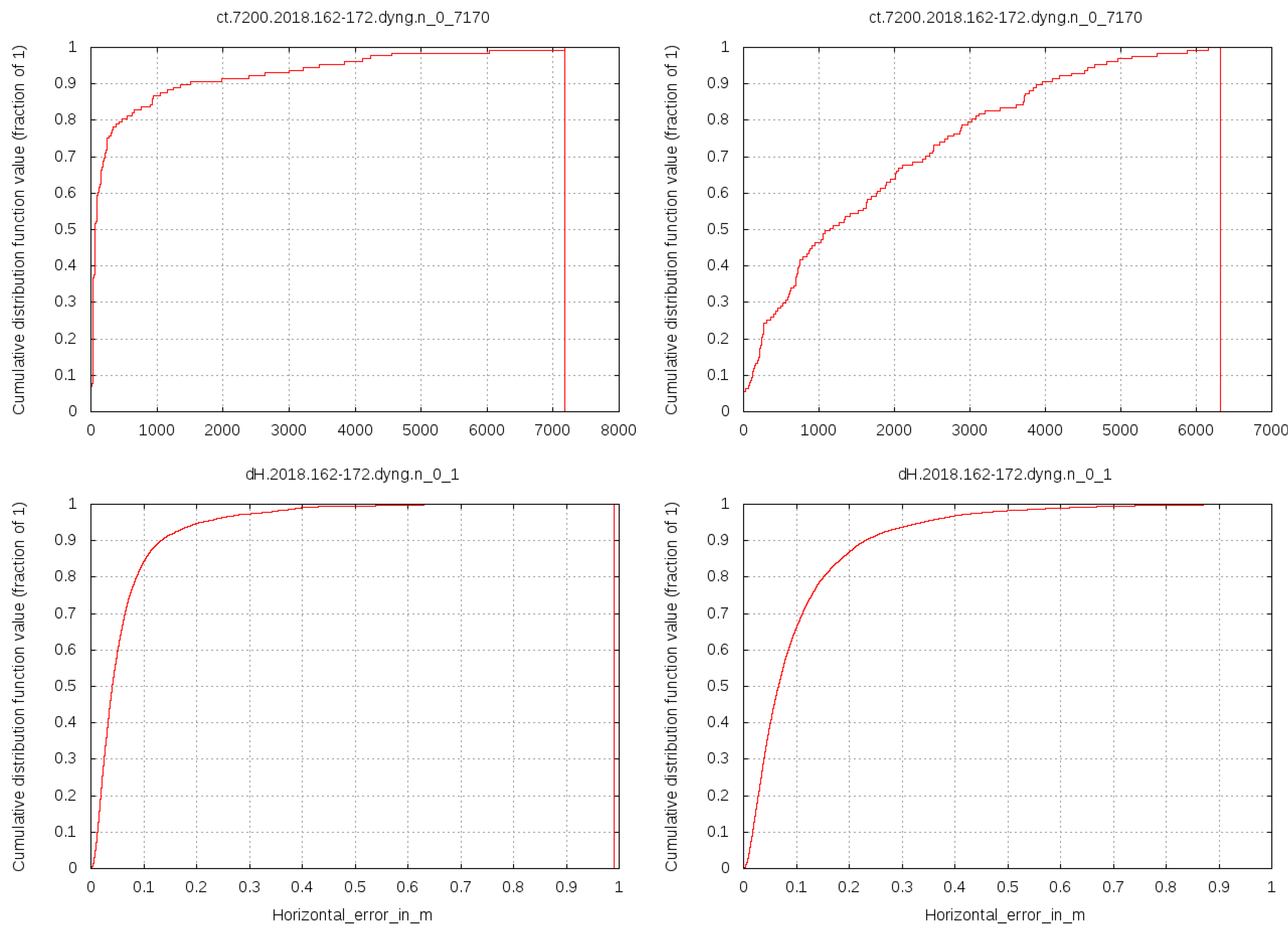
4.1.2. Convergence Time below 10 cm of Horizontal Positioning Error
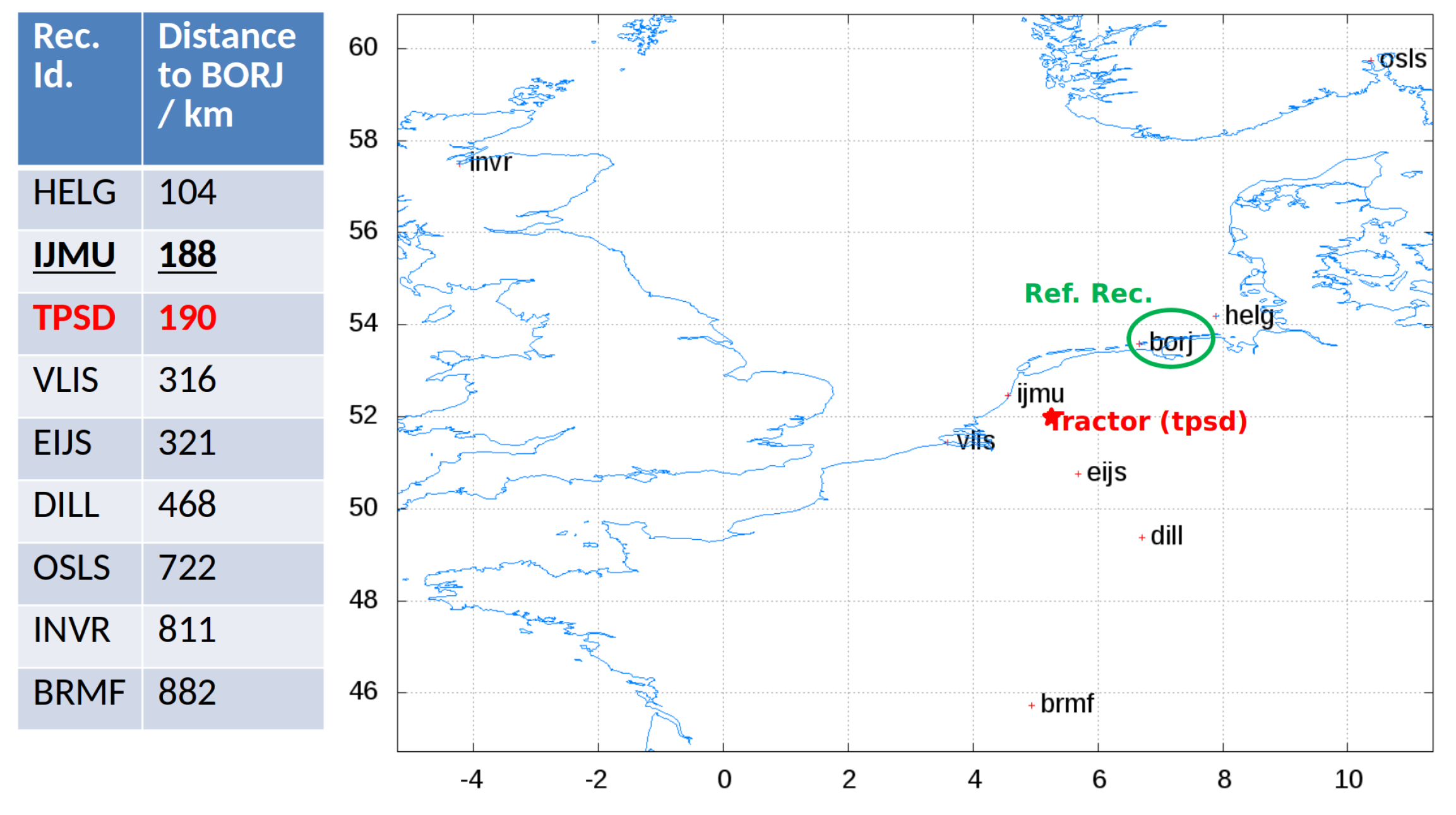
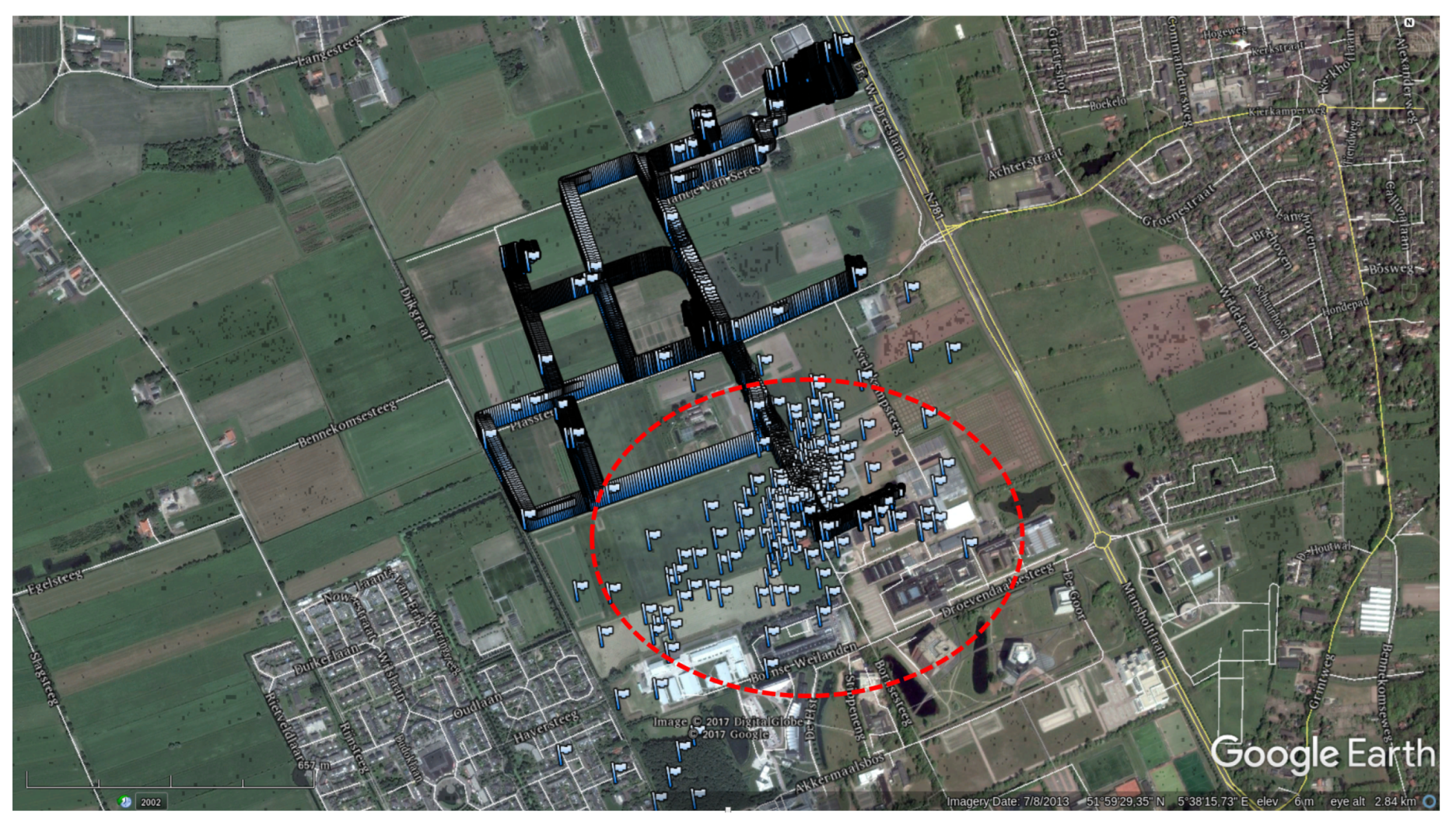
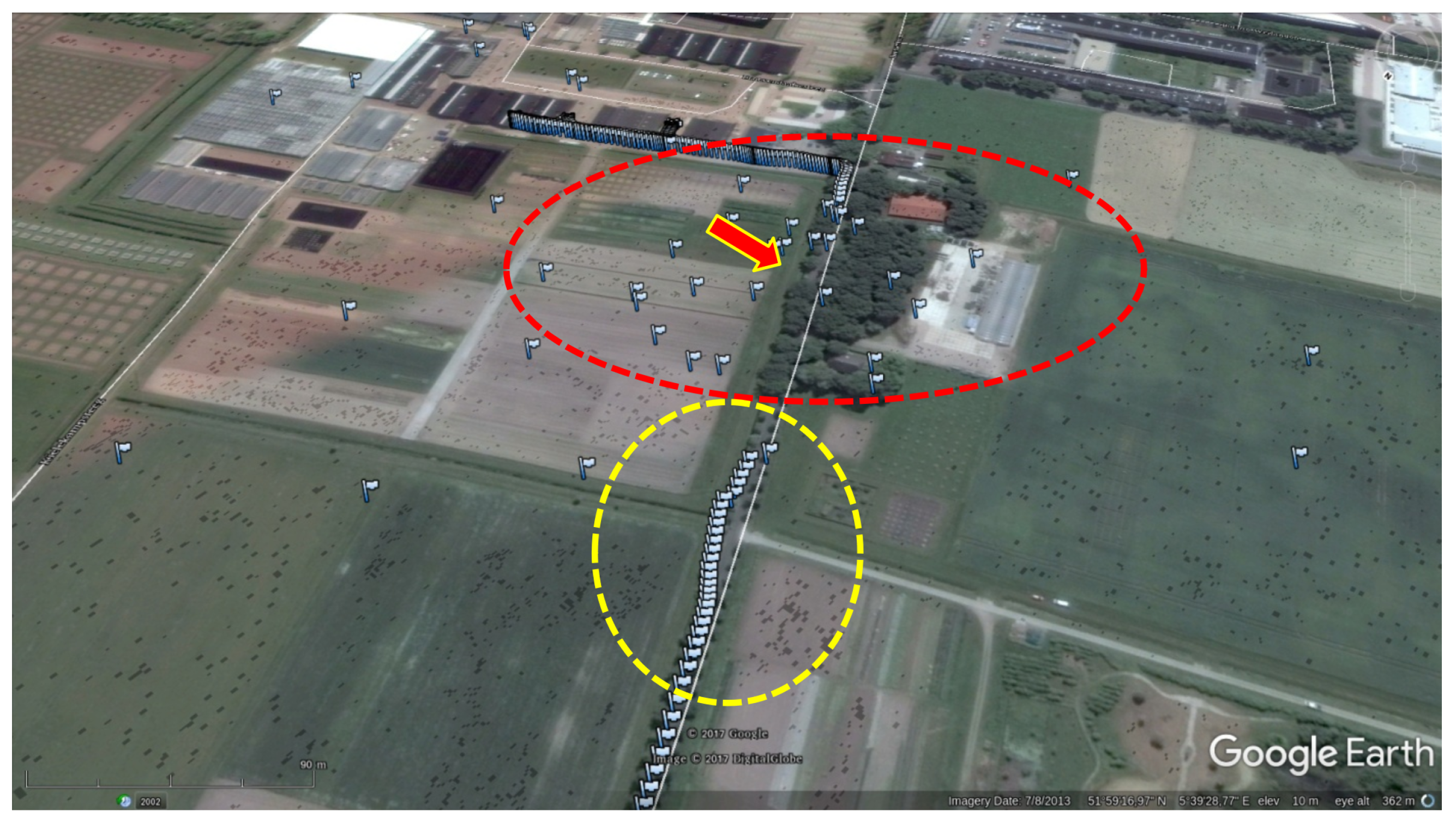
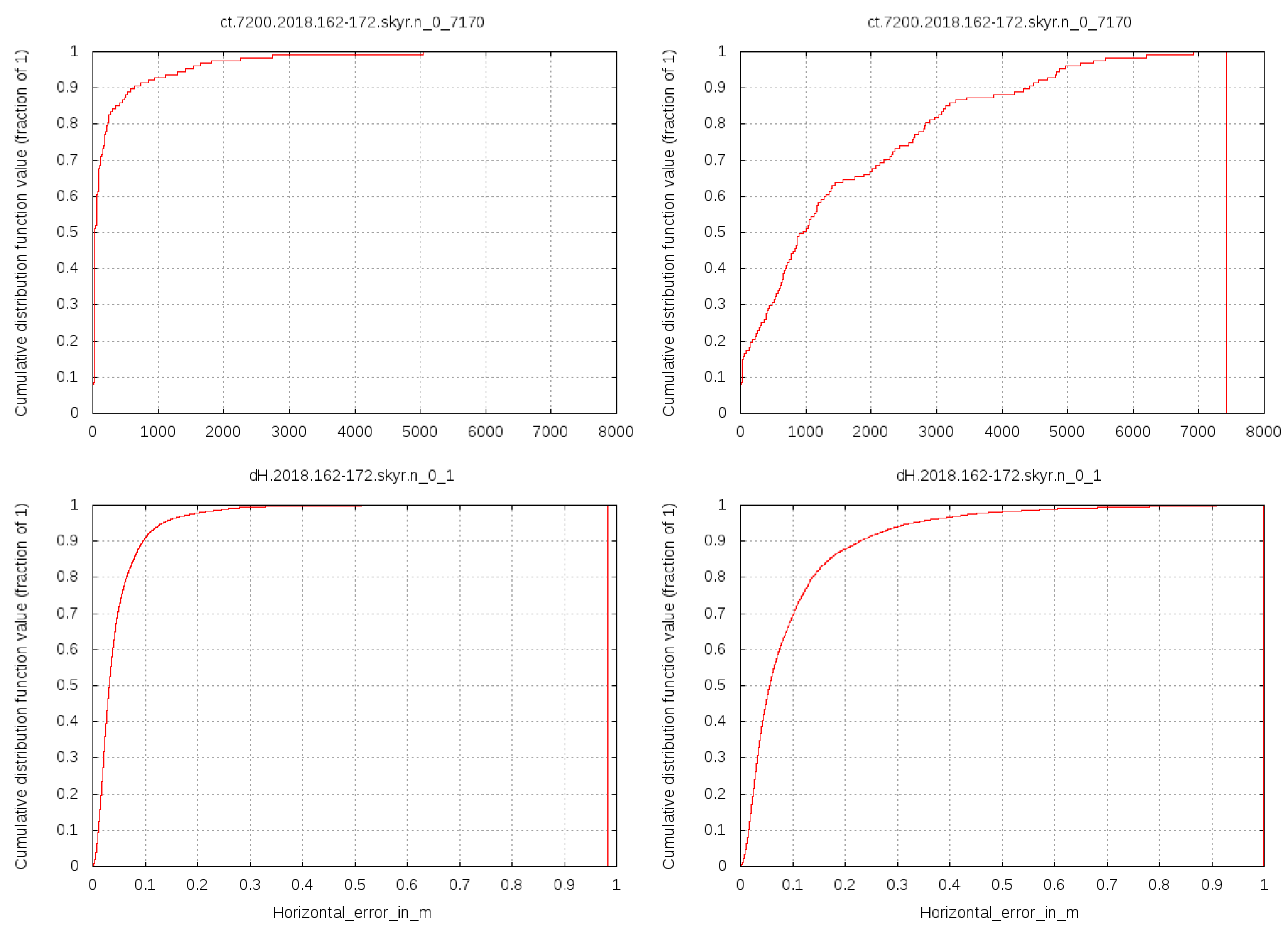
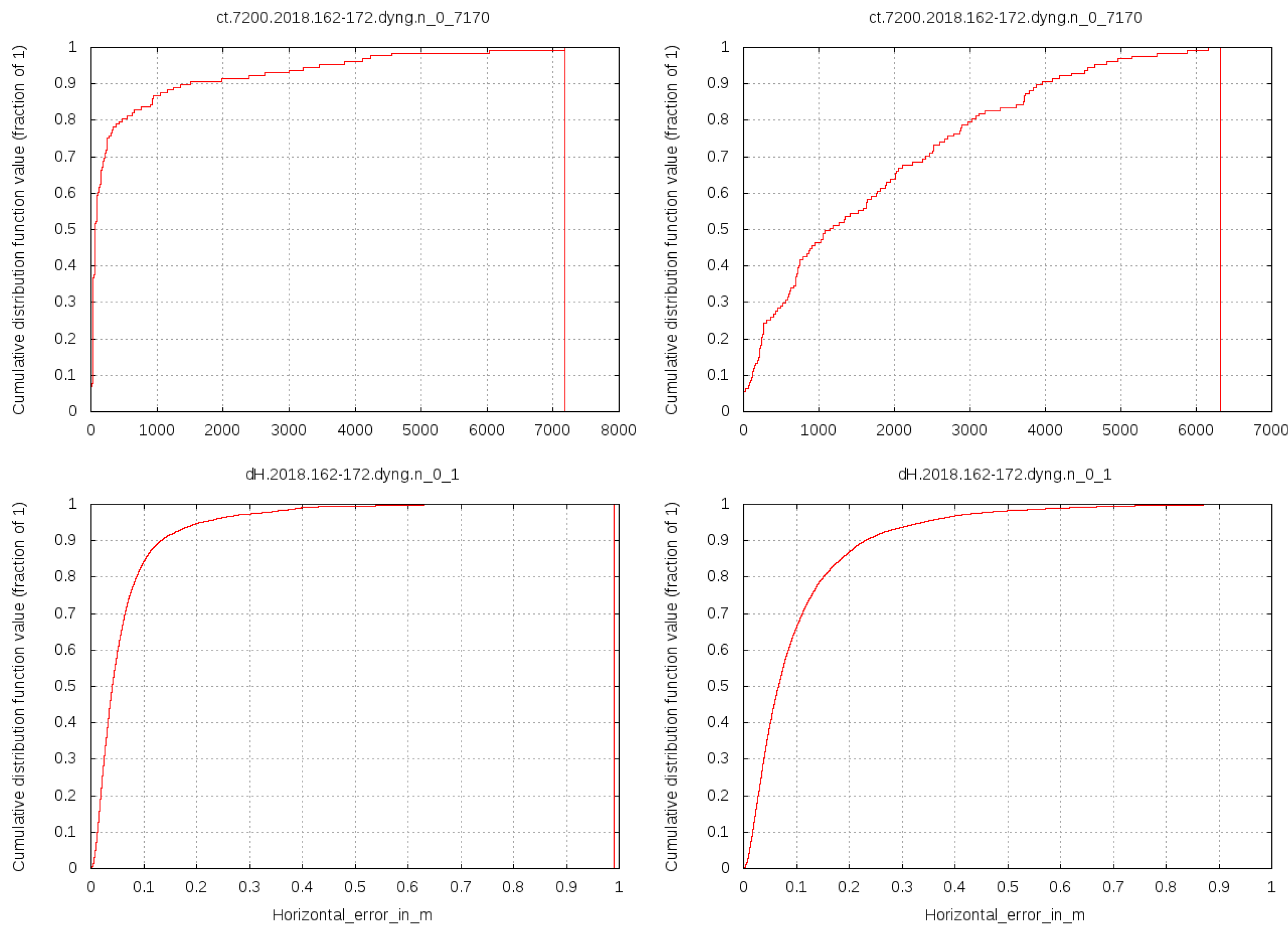
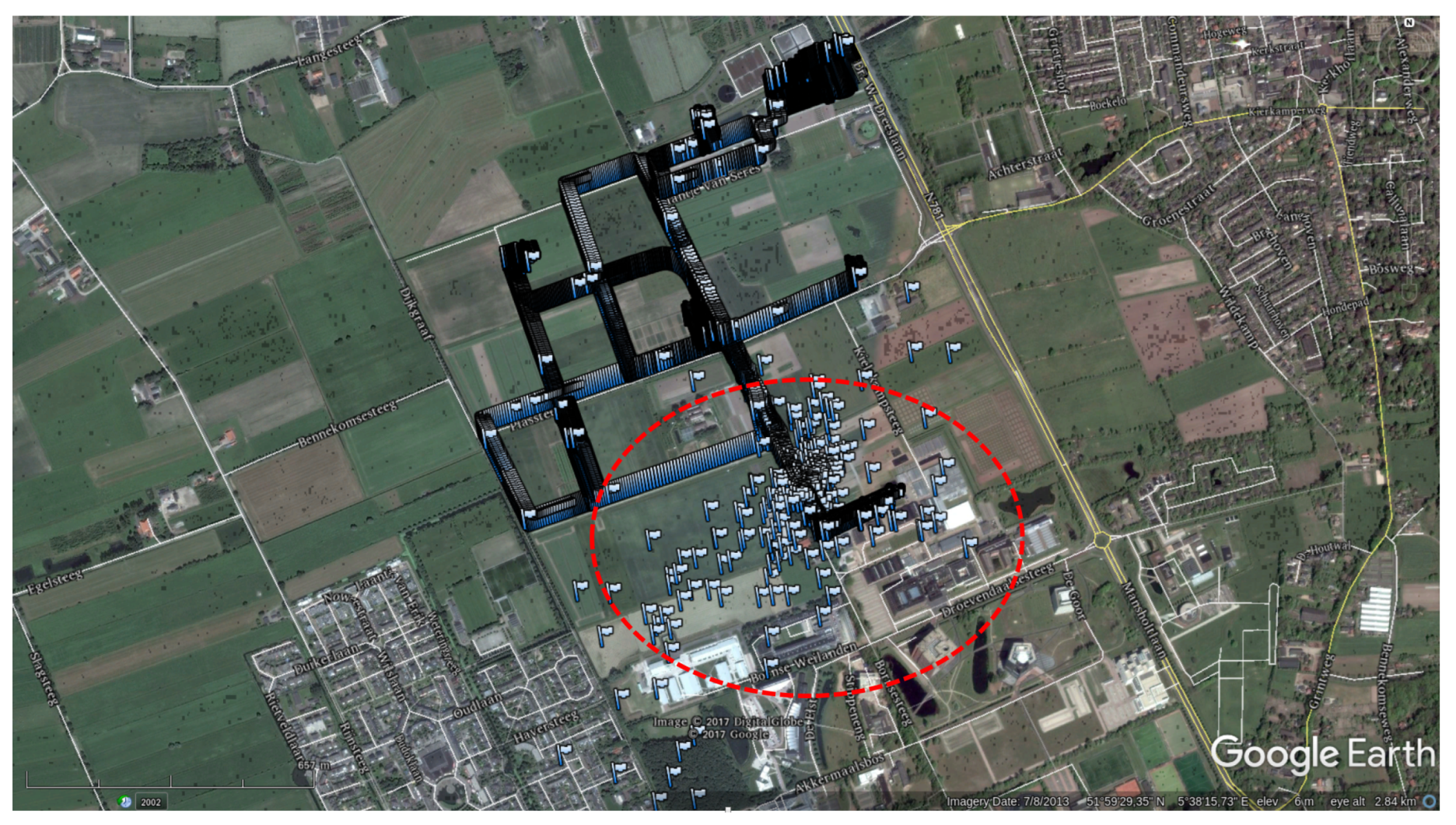
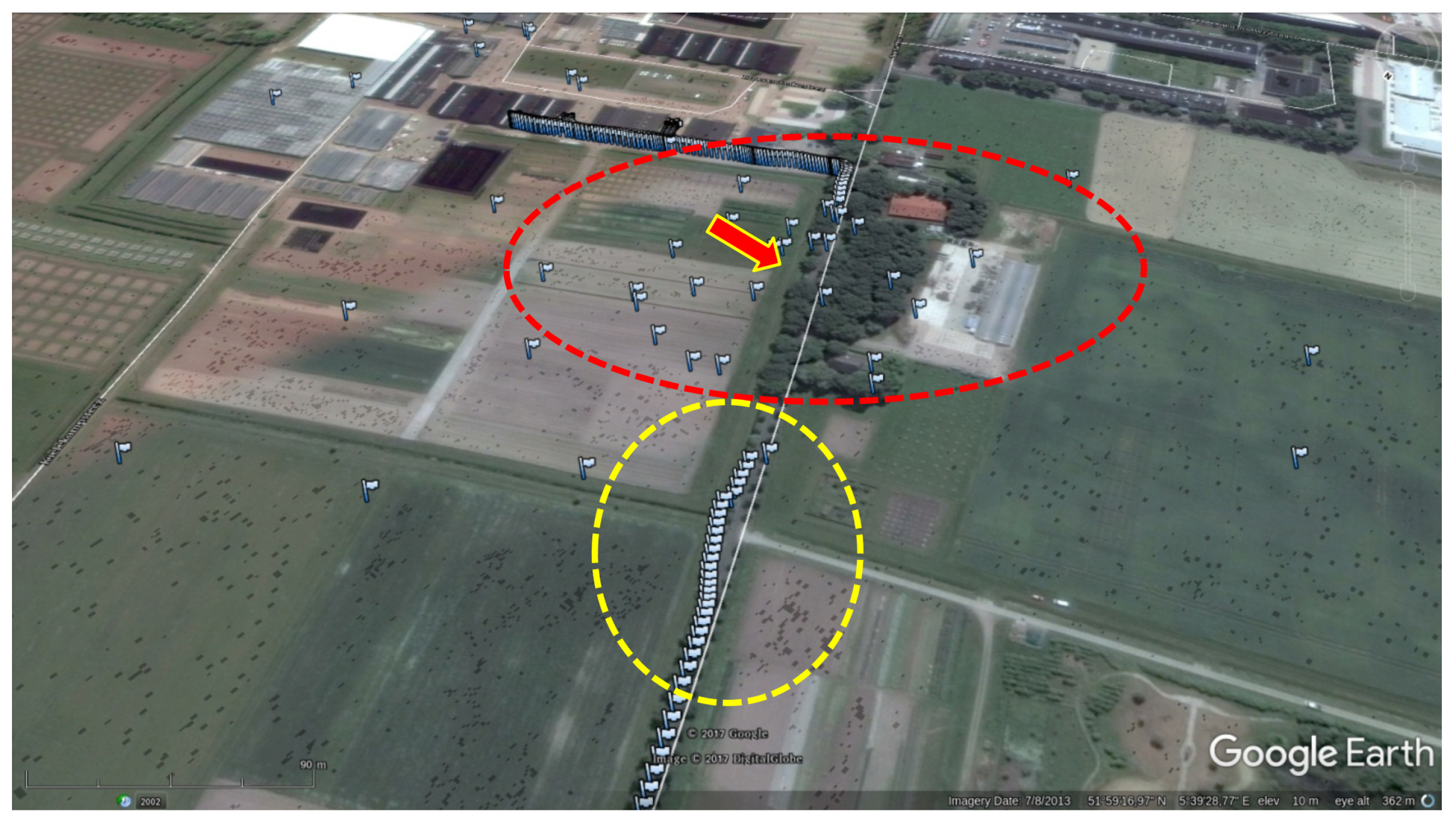
4.2. Second Scenario: Spraying Tractor Mounted Rover
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hernández-Pajares, M.; Juan, J.; Sanz, J.; Colombo, O.L. Application of ionospheric tomography to real-time GPS carrier-phase ambiguities Resolution, at scales of 400–1000 km and with high geomagnetic activity. Geophys. Res. Lett. 2000, 27, 2009–2012. [Google Scholar] [CrossRef]
- Zumberge, J.; Heflin, M.; Jefferson, D.; Watkins, M.; Webb, F. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Olivares-Pulido, G.; Terkildsen, M.; Arsov, K.; Teunissen, P.; Khodabandeh, A.; Janssen, V. A 4 D tomographic ionospheric model to support PPP-RTK. J. Geod. 2019, 93, 1673–1683. [Google Scholar] [CrossRef]
- Olivares-Pulido, G.; Hernández-Pajares, M.; Lyu, H.; Gu, S.; García-Rigo, A.; Graffigna, V.; Tomaszewski, D.; Wielgosz, P.; Rapiński, J.; Krypia-Gregorczyk, A.; et al. Ionospheric tomographic common clock model of undifferenced uncombined GNSS measurements. J. Geod. 2021, 95, 122. [Google Scholar] [CrossRef]
- Teunissen, P.; Khodabandeh, A. Review and principles of PPP-RTK methods. J. Geod. 2015, 89, 217–240. [Google Scholar] [CrossRef]
- Odijk, D.; Khodabandeh, A.; Nadarajah, N.; Choudhury, M.; Zhang, B.; Li, W.; Teunissen, P.J. PPP-RTK by means of S-system theory: Australian network and user demonstration. J. Spat. Sci. 2017, 62, 3–27. [Google Scholar] [CrossRef]
- Teunissen, P.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin/Heidelberg, Germany, 2017; p. 1327. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Aragón-Ángel, À.; Defraigne, P.; Bergeot, N.; Prieto-Cerdeira, R.; García-Rigo, A. Distribution and mitigation of higher-order ionospheric effects on precise GNSS processing. J. Geophys. Res. Solid Earth 2014, 119, 3823–3837. [Google Scholar] [CrossRef]
- Hernandez-Pajares, M.; Juan, J.; Sanz, J. Neural network modeling of the ionospheric electron content at global scale using GPS data. Radio Sci. 1997, 32, 1081–1089. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.; Sanz, J. New approaches in global ionospheric determination using ground GPS data. J. Atmos. Sol.-Terr. Phys. 1999, 61, 1237–1247. [Google Scholar] [CrossRef]
- Boehm, J.; Schuh, H. Vienna mapping functions in VLBI analyses. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.; Sanz, J.; Aragon-Angel, A.; Ramos-Bosch, P.; Samson, J.; Tossaint, M.; Albertazzi, M.; Odijk, D.; Teunissen, P.; et al. Wide-area RTK: High precision positioning on a continental scale. Inside GNSS 2010, 5, 35–46. [Google Scholar]
- Ganas, A.; Drakatos, G.; Rontogianni, S.; Tsimi, C.; Petrou, P.; Papanikolaou, M.; Argyrakis, P.; Boukouras, K.; Melis, N.; Stavrakakis, G. NOANET: The new permanent GPS network for Geodynamics in Greece. Geophys. Res. Abstr. 2008, 10, 1. [Google Scholar]
- Bertiger, W.; Bar-Sever, Y.; Dorsey, A.; Haines, B.; Harvey, N.; Hemberger, D.; Heflin, M.; Lu, W.; Miller, M.; Moore, A.W.; et al. GipsyX/RTGx, a new tool set for space geodetic operations and research. Adv. Space Res. 2020, 66, 469–489. [Google Scholar] [CrossRef]
- Graffigna, V. Consistency of Different Tropospheric Models and Mapping Functions for Precise GNSS Processing. Master’s Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2017. [Google Scholar]
- Hernández-Pajares, M.; Juan, J.; Sanz, J.; Aragón-Àngel, A. Propagation of medium scale traveling ionospheric disturbances at different latitudes and solar cycle conditions. Radio Sci. 2012, 47, 1–22. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Wielgosz, P.; Paziewski, J.; Krypiak-Gregorczyk, A.; Krukowska, M.; Stepniak, K.; Kaplon, J.; Hadas, T.; Sosnica, K.; Bosy, J.; et al. Direct MSTID mitigation in precise GPS processing. Radio Sci. 2017, 52, 321–337. [Google Scholar] [CrossRef]
- Yang, H.; Monte-Moreno, E.; Hernández-Pajares, M. Multi-TID detection and characterization in a dense GNSS receiver network. J. Geophys.Res. Space Phys. 2017, 122, 9554–9575. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernández-Pajares, M.; Olivares-Pulido, G.; Graffigna, V.; García-Rigo, A.; Lyu, H.; Roma-Dollase, D.; de Lacy, M.C.; Fernández-Prades, C.; Arribas, J.; Majoral, M.; et al. Wide-Area GNSS Corrections for Precise Positioning and Navigation in Agriculture. Remote Sens. 2022, 14, 3845. https://doi.org/10.3390/rs14163845
Hernández-Pajares M, Olivares-Pulido G, Graffigna V, García-Rigo A, Lyu H, Roma-Dollase D, de Lacy MC, Fernández-Prades C, Arribas J, Majoral M, et al. Wide-Area GNSS Corrections for Precise Positioning and Navigation in Agriculture. Remote Sensing. 2022; 14(16):3845. https://doi.org/10.3390/rs14163845
Chicago/Turabian StyleHernández-Pajares, Manuel, Germán Olivares-Pulido, Victoria Graffigna, Alberto García-Rigo, Haixia Lyu, David Roma-Dollase, M. Clara de Lacy, Carles Fernández-Prades, Javier Arribas, Marc Majoral, and et al. 2022. "Wide-Area GNSS Corrections for Precise Positioning and Navigation in Agriculture" Remote Sensing 14, no. 16: 3845. https://doi.org/10.3390/rs14163845
APA StyleHernández-Pajares, M., Olivares-Pulido, G., Graffigna, V., García-Rigo, A., Lyu, H., Roma-Dollase, D., de Lacy, M. C., Fernández-Prades, C., Arribas, J., Majoral, M., Tisropoulos, Z., Stamatelopoulos, P., Symeonidou, M., Schmidt, M., Goss, A., Erdogan, E., van Evert, F. K., Blok, P. M., Grosso, J., ... Hriscu, A. (2022). Wide-Area GNSS Corrections for Precise Positioning and Navigation in Agriculture. Remote Sensing, 14(16), 3845. https://doi.org/10.3390/rs14163845