
A Novel Method of Ship Detection under Cloud Interference for Optical Remote Sensing Images


Abstract
:1. Introduction
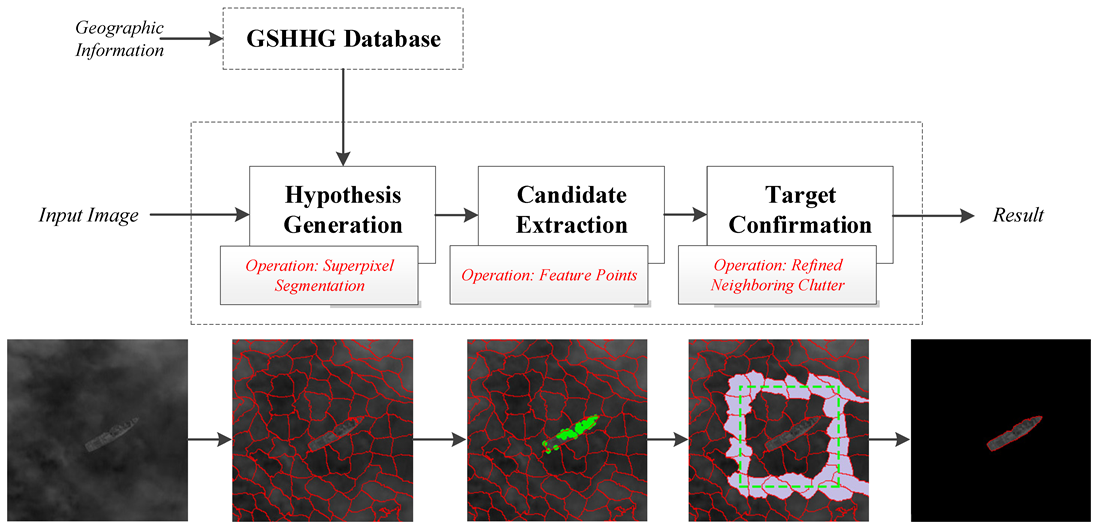
2. Method Theory Explanation
2.1. Hypothesis Generation
2.2. Candidate Extraction
2.3. Target Confirmation
3. Experimental Results
3.1. Hypothesis Generation Results
3.2. Candidate Extraction Results
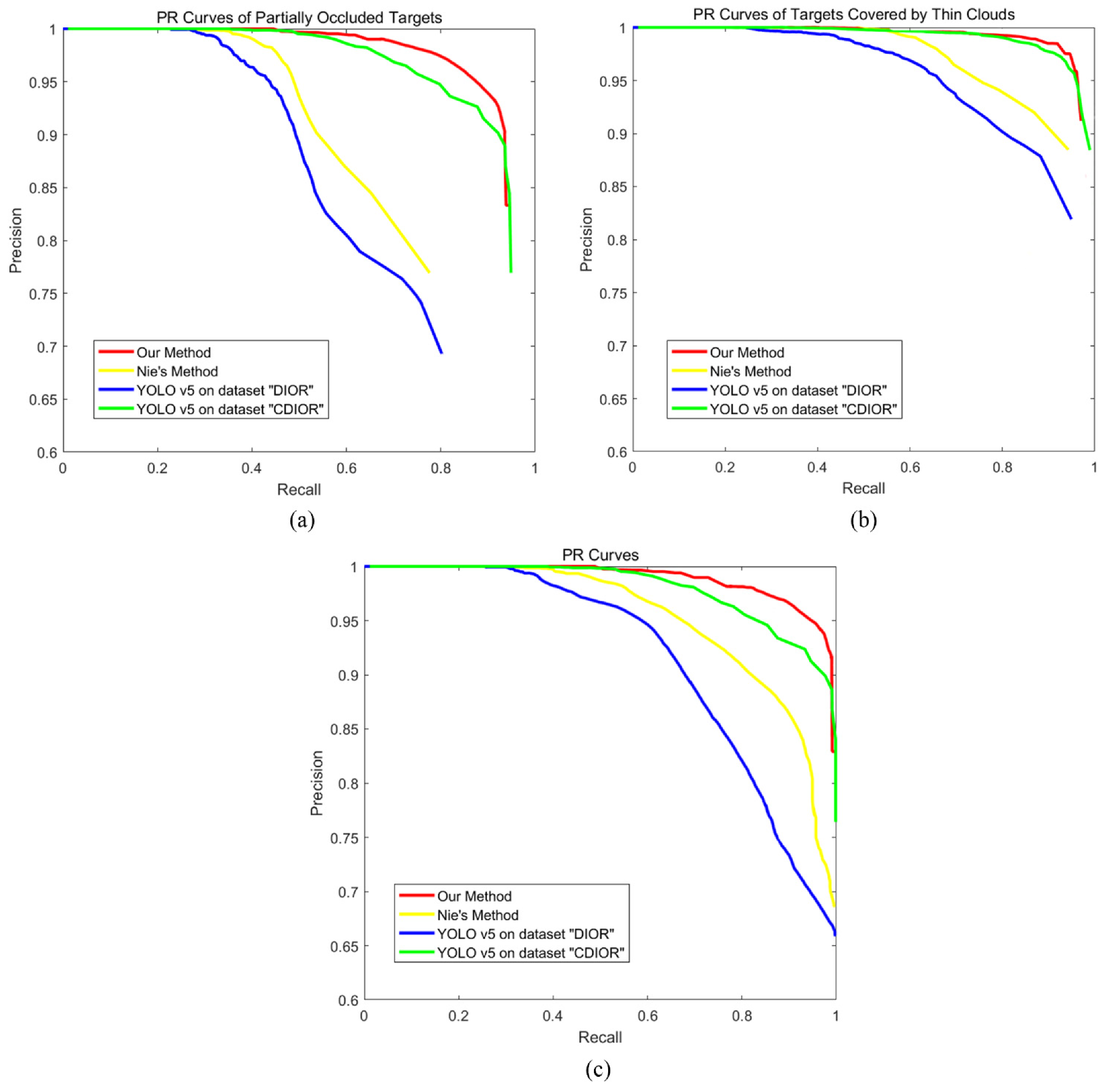
3.3. Target Confirmation Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.N.; Zhang, L.; Wang, Y.; Feng, P.M.; He, R. ShipRSImageNet: A Large-Scale Fine-Grained Dataset for Ship Detection in High-Resolution Optical Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8458–8472. [Google Scholar] [CrossRef]
- Wang, P.; Liu, J.; Zhang, Y.; Zhi, Z.; Cai, Z.; Song, N. A Novel Cargo Ship Detection and Directional Discrimination Method for Remote Sensing Image Based on Lightweight Network. J. Mar. Sci. Eng. 2021, 9, 932. [Google Scholar] [CrossRef]
- Yu, Y.; Qian, J.; Wu, Q.L. Visual Saliency via Multiscale Analysis in Frequency Domain and Its Applications to Ship Detection in Optical Satellite Images. Front. Neurorobot. 2022, 15, 767299. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Cong, R.; Hou, J.; Zhang, S.; Qian, Y.; Kwong, S. Nested network with two-stream pyramid for salient object detection in optical remote sensing images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9156–9166. [Google Scholar] [CrossRef] [Green Version]
- Cui, Z.Y.; Leng, J.X.; Liu, Y.; Zhang, T.L.; Quan, P.; Zhao, L. SKNet: Detecting Rotated Ships as Keypoints in Optical Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8826–8840. [Google Scholar] [CrossRef]
- Liu, Y.F.; Zhao, J.; Qin, Y. A novel technique for ship wake detection from optical images. Remote Sens. Environ. 2021, 258, 112375. [Google Scholar] [CrossRef]
- Li, K.; Wan, G.; Cheng, G.; Meng, L.; Han, J. Object detection in optical remote sensing images: A survey and a new benchmark. ISPRS J. Photogramm. Remote Sens. 2020, 159, 296–307. [Google Scholar] [CrossRef]
- Wang, L.; Fan, S.; Liu, Y.; Li, Y.; Fei, C.; Liu, J.; Liu, B.; Dong, Y.; Liu, Z.; Zhao, X. A Review of Methods for Ship Detection with Electro-Optical Images in Marine Environments. J. Mar. Sci. Eng. 2021, 9, 1408. [Google Scholar] [CrossRef]
- Hu, J.; Zhi, X.; Shi, T.; Yu, L.; Zhang, W. Ship Detection via Dilated Rate Search and Attention-Guided Feature Representation. Remote Sens. 2021, 13, 4840. [Google Scholar] [CrossRef]
- Lu, M.; Li, F.; Zhan, B.; Li, H.; Yang, X.; Lu, X.; Xiao, H. An Improved Cloud Detection Method for GF-4 Imagery. Remote Sens. 2020, 12, 1525. [Google Scholar] [CrossRef]
- Wang, Z.; Du, J.; Xia, J.; Chen, C.; Zeng, Q.; Tian, L.; Wang, L.; Mao, Z. An Effective Method for Detecting Clouds in GaoFen-4 Images of Coastal Zones. Remote Sens. 2020, 12, 3003. [Google Scholar] [CrossRef]
- Yan, Z.Y.; Yan, M.L.; Sun, H.; Fu, K.; Hong, J.; Sun, J.; Zhang, Y.; Sun, X. Cloud and cloud shadow detection using multilevel feature fused segmentation network. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1600–1604. [Google Scholar] [CrossRef]
- Lyu, Y.; Peng, L.; Pu, T.; Yang, C.; Wang, J.; Peng, Z. Cirrus Detection Based on RPCA and Fractal Dictionary Learning in Infrared imagery. Remote Sens. 2020, 12, 142. [Google Scholar] [CrossRef] [Green Version]
- Miao, Z.; Fu, K.; Sun, H.; Sun, X.; Yan, M. Automatic Water-Body Segmentation from High-Resolution Satellite Images via Deep Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 602–606. [Google Scholar] [CrossRef]
- Nie, T.; Han, X.; He, B.; Li, X.; Liu, H.; Bi, G. Ship Detection in Panchromatic Optical Remote Sensing Images Based on Visual Saliency and Multi-Dimensional Feature Description. Remote Sens. 2020, 12, 152. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.S.; Ren, J.X.; Su, C.; Huang, M. Ship Detection in Multispectral Remote Sensing Images via Saliency Analysis. Appl. Ocean Res. 2021, 106, 102448. [Google Scholar] [CrossRef]
- Yu, J.X.; Peng, X.Y.; Li, S.L.; Lu, Y.B.; Ma, W.J. A Lightweight Ship Detection Method in Optical Remote Sensing Image under Cloud Interference. In Proceedings of the 2021 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Glasgow, UK, 17–20 May 2021. [Google Scholar] [CrossRef]
- Qi, S.X.; Ma, J.; Lin, J.; Li, Y.S.; Tian, J.W. Unsupervised Ship Detection Based on Saliency and S-HOG Descriptor from Optical Satellite Images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1451–1455. [Google Scholar] [CrossRef]
- Su, N.; Huang, Z.B.; Yan, Y.M.; Zhao, C.H.; Zhou, S.Y. Detect Larger at Once: Large-Area Remote-Sensing Image Arbitrary-Oriented Ship Detection. IEEE Geosci. Remote Sens. Lett. 2022, 19, 6505605. [Google Scholar] [CrossRef]
- Qin, X.; Wang, Z.L.; Bai, Y.C.; Xie, X.D.; Jia, H.Z. FFA-Net: Feature Fusion Attention Network for Single Image Dehazing. Assoc. Adv. Artif. Intell. (AAAI) 2020, 34, 11908–11915. [Google Scholar] [CrossRef]
- Wang, R.; You, Y.N.; Zhang, Y.K.; Zhou, W.L.; Liu, J. Ship detection in foggy remote sensing image via scene classification R-CNN. In Proceedings of the 2018 International Conference on Network Infrastructure and Digital Content (IC-NIDC), Guiyang, China, 22–24 August 2018; pp. 81–85. [Google Scholar] [CrossRef]
- Chen, Y.; Li, Y.; Wang, J.; Chen, W.; Zhang, X. Remote Sensing Image Ship Detection under Complex Sea Conditions Based on Deep Semantic Segmentation. Remote Sens. 2020, 12, 625. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Zhou, B.J.; Zhao, Y.S.; Yan, S. Ship Detection Algorithm based on Improved YOLO V5. In Proceedings of the 2021 6th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 15–17 July 2021. [Google Scholar] [CrossRef]
- Hong, Z.H.; Yang, T.; Tong, X.H.; Zhang, Y.; Jiang, S.L.; Zhou, Y.Y.; Han, Y.L.; Wang, J.; Yang, S.H.; Liu, S.C. Multi-Scale Ship Detection from SAR and Optical Imagery via A More Accurate YOLOv3. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6083–6101. [Google Scholar] [CrossRef]
- Xu, Z.J.; Sun, J.W.; Huo, Y.H. Ship images detection and classification based on convolutional neural network with multiple feature regions. IET Signal Process. 2022, 1–15. [Google Scholar] [CrossRef]
- Dong, Y.; Chen, F.; Han, S.; Liu, H. Ship Object Detection of Remote Sensing Image Based on Visual Attention. Remote Sens. 2021, 13, 3192. [Google Scholar] [CrossRef]
- Li, L.; Zhou, Z.; Wang, B.; Miao, L.; Zong, H. A Novel CNN-Based Method for Accurate Ship Detection in HR Optical Remote Sensing Images via Rotated Bounding Box. IEEE Trans. Geosci. Remote Sens. 2021, 59, 686–699. [Google Scholar] [CrossRef]
- Liu, L.; Ouyang, W.L.; Wang, X.G.; Fieguth, P.; Chen, J.; Liu, X.W.; Pietikäinen, M. Deep Learning for Generic Object Detection: A Survey. Int. J. Comput. Vis. 2020, 128, 261–318. [Google Scholar] [CrossRef] [Green Version]
- Zhu, K.; Zhang, X.; Chen, G.; Tan, X.; Liao, P.; Wu, H.; Cui, X.; Zuo, Y.; Lv, Z. Single Object Tracking in Satellite Videos: Deep Siamese Network Incorporating an Interframe Difference Centroid Inertia Motion Model. Remote Sens. 2021, 13, 1298. [Google Scholar] [CrossRef]
- Wang, N.; Li, B.; Xu, Q.; Wang, Y. Automatic Ship Detection in Optical Remote Sensing Images Based on Anomaly Detection and SPP-PCANet. Remote Sens. 2019, 11, 47. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.Q.; Li, G.; Zhang, X.P.; He, Y. A Fast CFAR Algorithm Based on Density-Censoring Operation for Ship Detection in SAR Images. IEEE Signal Process. Lett. 2021, 28, 1085–1089. [Google Scholar] [CrossRef]
- Cui, Z.; Qin, Y.; Zhong, Y.; Cao, Z.; Yang, H. Target Detection in High-Resolution SAR Image via Iterating Outliers and Recursing Saliency Depth. Remote Sens. 2021, 13, 4315. [Google Scholar] [CrossRef]
- Li, M.D.; Cui, X.C.; Chen, S.W. Adaptive Superpixel-Level CFAR Detector for SAR Inshore Dense Ship Detection. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4010405. [Google Scholar] [CrossRef]
- Zou, Z.X.; Shi, Z.W. Ship Detection in Spaceborne Optical Image with SVD Networks. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5832–5845. [Google Scholar] [CrossRef]
- GSHHG—A Global Self-Consistent, Hierarchical, High-Resolution Geography Database, Nat. Centers Environ. Inf. (NCEI) Boulder, CO, USA. [Online]. Available online: http://www.ngdc.noaa.gov/mgg/shorelines/gshhs.html (accessed on 1 May 2022).
- Ban, Z.H.; Liu, J.G.; Cao, L. Superpixel Segmentation Using Gaussian Mixture Model. IEEE Trans. Image Process. 2018, 27, 4105–4117. [Google Scholar] [CrossRef] [Green Version]
- Yu, W.Y.; Wang, Y.H.; Liu, H.W.; He, J.L. Superpixel-Based CFAR Target Detection for High-Resolution SAR Images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 730–734. [Google Scholar] [CrossRef]
- Harris, C.; Stephens, M. A Combined Corner and Edge Detector. In Proceedings of the 4th Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; pp. 147–151. [Google Scholar]
- Li, T.; Peng, D.L.; Chen, Z.K.; Guo, B.F. Superpixel-Level CFAR Detector Based on Truncated Gamma Distribution for SAR Images. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1421–1425. [Google Scholar] [CrossRef]
- Ultralytics. YOLOv5. Available online: https://github.com/ultralytics/yolov5 (accessed on 1 May 2022).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Latitude and Longitude | Date of Photography | Calibration Type |
|---|---|---|---|
| (a) | E114.1_N22.1 | 31 October 2016 | radiance |
| (b) | E122.3_N31.4 | 13 August 2016 | |
| (c) | E113.8_N22.4 | 24 December 2015 | |
| (d) | E114.5_N22.4 | 8 December 2014 | |
| (e) | E113.7_N22.4 | 15 December 2016 | |
| (f) | E121.8_N38.9 | 31 August 2015 |
| Number | Latitude and Longitude | Date of Photography | Calibration Type |
|---|---|---|---|
| 1 | E113.8_N22.4 | 24 Decmber 2015 | radiance |
| 2 | E113.8_N22.2 | 31 October 2016 | |
| 3 | E114.2_N22.2 | 15 August 2014 | |
| 4 | E122.3_N31.4 | 13 August 2016 | |
| 5 | E121.8_N38.9 | 9 November 2015 |
| Method | Accuracy | MA | FA |
|---|---|---|---|
| YOLO v5 on dataset “DIOR” | 68.2% | 31.8% | 42.1% |
| YOLO v5 on dataset “CDIOR” | 81.9% | 18.1% | 28.5% |
| Nie’s Method | 78.3% | 21.7% | 39.6% |
| Our method | 90.4% | 9.6% | 10.8% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Zhang, X.; Sun, W.; Huang, M. A Novel Method of Ship Detection under Cloud Interference for Optical Remote Sensing Images. Remote Sens. 2022, 14, 3731. https://doi.org/10.3390/rs14153731
Wang W, Zhang X, Sun W, Huang M. A Novel Method of Ship Detection under Cloud Interference for Optical Remote Sensing Images. Remote Sensing. 2022; 14(15):3731. https://doi.org/10.3390/rs14153731
Chicago/Turabian StyleWang, Wensheng, Xinbo Zhang, Wu Sun, and Min Huang. 2022. "A Novel Method of Ship Detection under Cloud Interference for Optical Remote Sensing Images" Remote Sensing 14, no. 15: 3731. https://doi.org/10.3390/rs14153731
APA StyleWang, W., Zhang, X., Sun, W., & Huang, M. (2022). A Novel Method of Ship Detection under Cloud Interference for Optical Remote Sensing Images. Remote Sensing, 14(15), 3731. https://doi.org/10.3390/rs14153731