1. Introduction
Undersea/subsea exploration is an important task in many industries, ranging from fishery to oil drilling, where undersea/subsea biodiversity [
1] remains a concern due to the impact of these industry activities. The supply of safe and sustainable seafoods [
2] is always an important factor for policymakers in many countries because food supply heavily relies on fishery industry. In particular, the recent environmental challenges such as global climate changes [
3], arctic iceberg melting [
4], microplastic pollution [
5], and algae pollution [
6] have become a surging threat to human life on the planet. In a long-term view, the study on undersea/subsea biodiversity not only has important economic and environmental value in single countries, but also a wide impact on the global environment and climate change.
However, unlike the investigation of land-cover-based biodiversity, subsea/undersea biodiversity [
7] is not easy to directly study due to the difficulty in collecting data under the surface of seawater. Automated underwater vehicles (AUVs) [
8,
9,
10] are an effective means for undersea and subsea investigation. Although it is technically feasible to use AUVs for underwater investigation, it is challenging for AUVs to maneuver automatically in deep sea due to the difficulties in signal communication [
1], sensory data collection, and automation complexities. In particular, due to the murkiness in underwater conditions, the cameras mounted on AUVs may suffer from challenges such as lower quality of images/videos. Such challenges will not only degrade the performance of computer vision-based object detectors, but also lead to a biased detection by missing some specific targets in deep and dark waters.
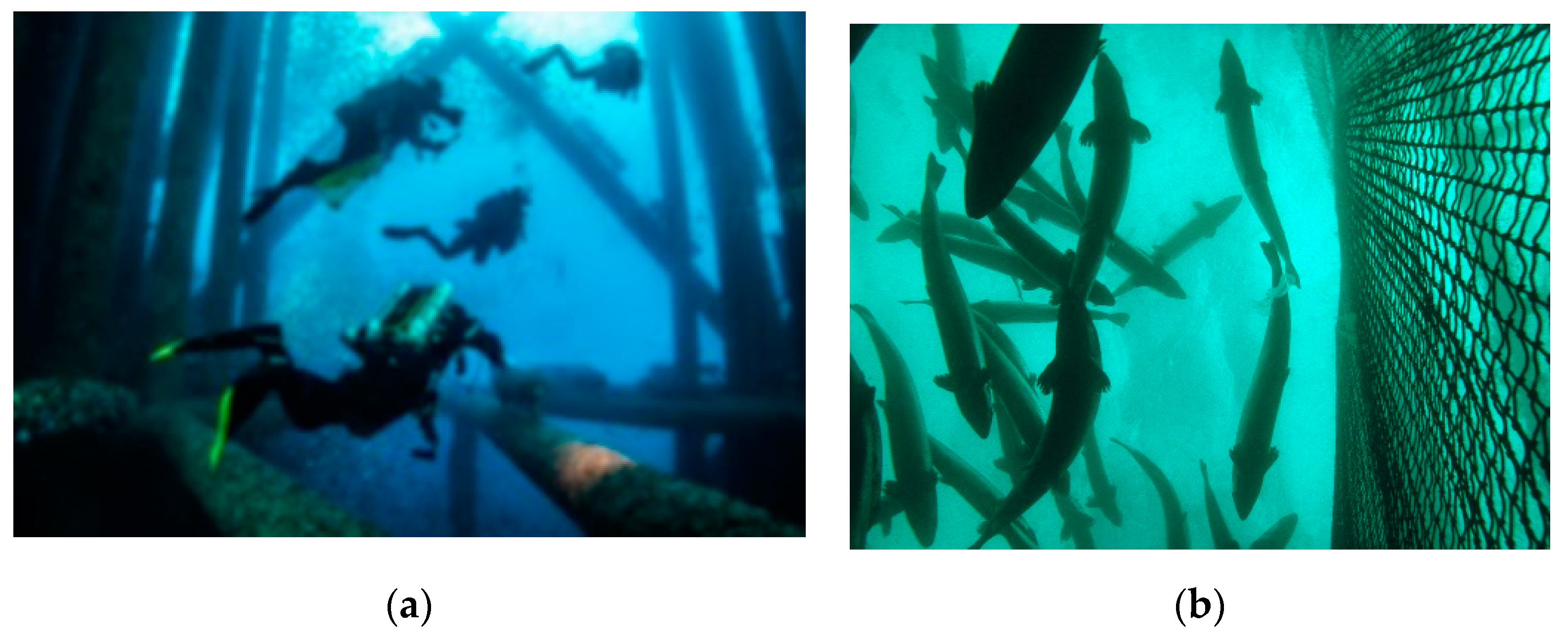
Underwater object detection is an indispensable task in many automated AUV tasks such as the monitoring of the Aberdeen oil field, as shown in
Figure 1a, where they can be used to fix various system failure issues. They can also be used for investigations of different species of fish underwater with blurred vision, as shown in
Figure 1b. Underwater object detection is a complicated task [
7], facing challenges due to the low light environment, water diffraction, water wave impact, etc. Consequently, these challenges lead to low-quality images or videos captured by the AUV-mounted cameras, where object detection becomes a tough task in such environments [
8]. The work carried out in this paper is aimed at helping to alleviate underwater object detection using AUV-mounted cameras, while achieving robust and fair performance in object detection.
In our recent work [
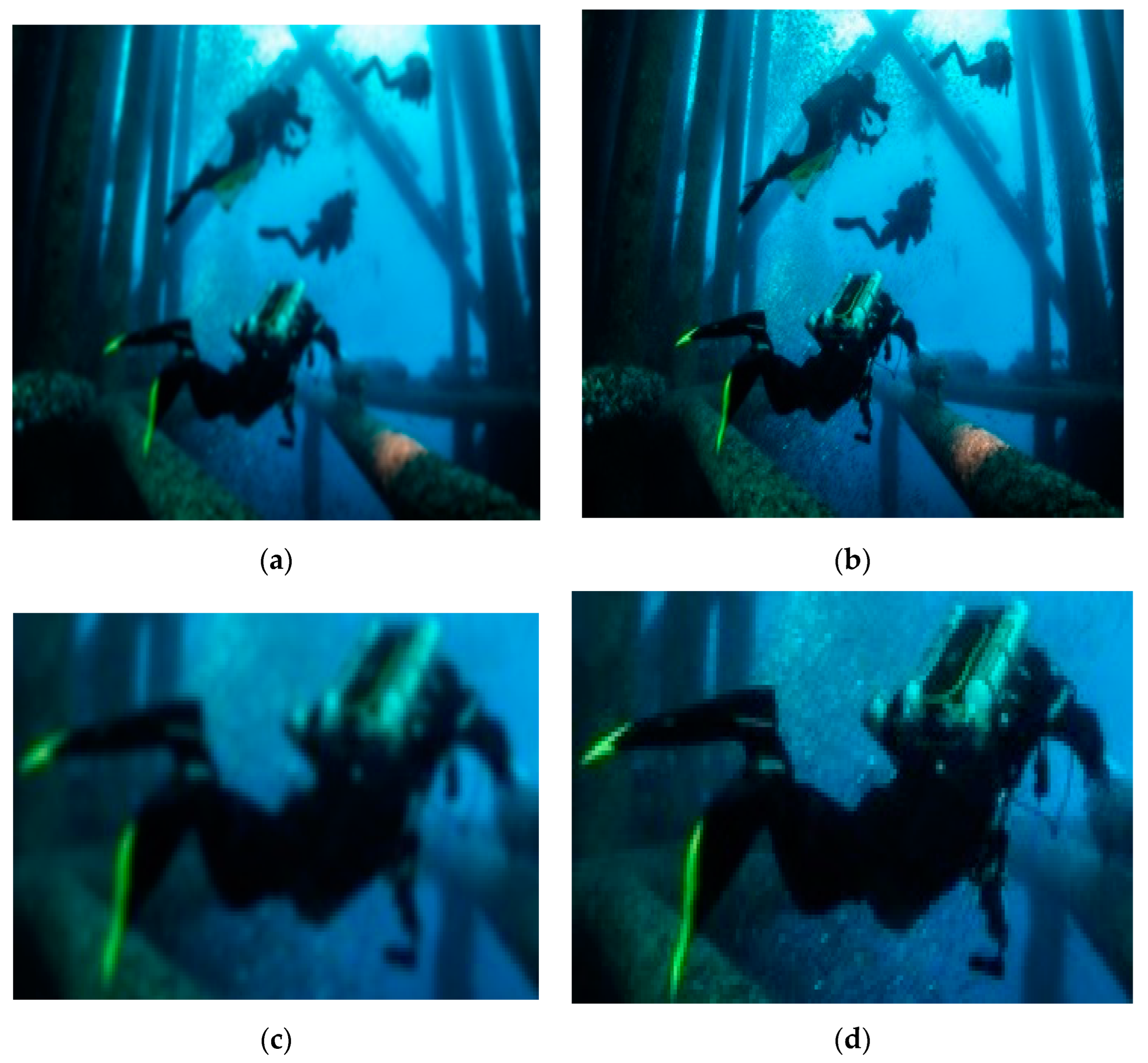
11], it was evidenced that image quality can critically impact on object detection. In [
12], we exploited a DCGAN (deep convolutional generative adversarial network) [
13] for image enhancement, as shown in
Figure 2, and we found that such an enhancement scheme could help alleviate the serious degradation of object detection caused by low-quality images. In this paper, we aimed to leverage our initial discovery and apply such a DCGAN-based framework [
12] for undersea/subsea object detection using a single-shot detector (SSD) [
14]. This combinational framework DCGAN+SSD can help object detection in underwater environments by engaging DCGAN for image conversion, after which the object detector is applied to the converted images. The idea is that such a combined structure would achieve a better accuracy on object detection in undersea videos, and the aim of this study was to validate this suggestion.
Here, we chose the SSD as our object detector because it is more robust in comparison with YOLO detectors [
15,
16]. YOLO detectors, as denoted by their name, “You Only Look Once”, are more aimed at quick detection, whereas we were more concerned with accuracy for our AUV applications. Our goal is to tackle the challenges of hostile underwater conditions and enable the computer vision detector to identify various objects including humans, fishes, plants, and marine vertebrates. For biodiversity studies in particular, various object types may be targeted [
7], and a robust and fair computer vision framework can greatly facilitate AUVs to fulfill a wide range of tasks, especially when AUVs require a smart self-piloting control for challenging civic, military, or scientific tasks.
In this paper, to adjust the DCGAN+SSD detector [
12] for undersea/subsea environments, we propose a particle swarm optimization (PSO)-based optimization to tune the hyperparameters in the DCGAN+SSD framework. In our work, we used multiple datasets including the CIFAR-100, CADDY, and Roboflow fish datasets for PSO-based hyperparameter tuning. The tests were then carried out on various videos taken in the wild from undersea/subsea setups, implying a very challenging cross-dataset validation.
Our contribution mainly resides in two aspects. First, via our experiments, we successfully validated our assumption and demonstrated that the proposed DCGAN+SSD could enable object detection at better detection rates in undersea/subsea videos under hostile undersea conditions. Secondly, in our further experiments, we successfully proved that our PSO+DCGAN+SSD could work better than the initial DCGAN+SSD model, achieving much more robust and fair object detection toward undersea/subsea challenges.
In the remainder of the paper,
Section 2 provides a literature review,
Section 3 presents our DCGAN+SSD framework, and
Section 4 describes our proposed PSO-based optimization method for hyperparameter tuning.
Section 5 gives our experiments and validation.
Section 6 concludes the paper.
2. Background and Related Work
Within the topics of video analysis and image understanding, object detection is a common task that has attracted great attention in recent years [
14]. The problem is often modeled in many traditional and modern object detection methods as examining whether a targeted object of an expected class is present in a rectangle of regions in an image or a video frame. Despite the problems faced by object detectors and computer vision, object detection is a mandatory tool for many applications [
17,
18,
19,
20,
21,
22]. It is used in satellite image analysis [
17], AI-automated medical diagnosis [
18,
19,
20], robotic vision [
21], behavioral analysis [
22], 3D sensing [
23], etc. In recent years, convolutional neural networks (CNNs) [
24] have become the most popular technology in the field of computer vision, especially for object detection [
15]. CNNs have been successfully exploited in many application fields such as self-driving cars [
25], pedestrian detection [
26] in smart city surveillance, and underwater object detection [
10], as discussed in this work.
Object detection techniques were researched widely in recent years, and many methods have been recommended to effectively solve the object detection challenge [
15]. Typical techniques dealing with object detectors include faster RCNN [
15], SSD [
12], and YOLO [
14]. In the case of object detection, images are analyzed under a group of candidate regions [
15] that could contain objects in an image. In [
27], stacked convolution networks were exploited for object detection. In [
28], object detection was modeled by detecting various components. Szegedy et al. [
24] used DCGAN as a colorization technique for monochromatic problems. In this work, we aimed to exploit DCGAN for the challenges faced in underwater object detection.
2.1. Challenges in Underwater Object Detection: Robustness and Fairness
Underwater object detection using AUVs is a challenging task due to the hostile condition in undersea/subsea waters, as shown in
Figure 1a,b. Oil drills, fishery monitoring, and biodiversity studies are examples [
1,
2,
3,
4,
5,
6,
7] that urgently need a robust solution. As undersea/subsea tasks [
8,
9,
10] are often expensive and dangerous for human divers, underwater object detection using AUVs is becoming more and more popular for various applications.
For example, in [
1], object detection was applied to detect marine life with different colors and shapes for a biodiversity study, whereas, in [
5], the focal loss suffered by underwater objects in front of cameras was studied. In this research, targeting the challenges in undersea conditions, we exploited DCGAN to improve the camera outputs, enabling a better fit for self-adjusted learning [
10] in undersea object detection.
It is worth mentioning that we need to consider not only the robustness of the object detection, but also the fairness of the detector toward all targeted objects [
29]. For example, in a biodiversity investigation [
6,
7], a biased detector may achieve very high detection rates on common objects and miss many rare species due to either data scarcity or, more simply, low-quality images in undersea conditions. As is often the case, biodiversity studies are more concerned about those rare species; hence, missing them could lead to incorrect inferences in biodiversity modeling.
2.2. Image Conversion via DCGAN
When considering the issues of image quality in object detection, DCGAN [
12,
13] can be a workable model to alleviate the challenges facing underwater object detection using AUVs. The application of DCGAN allows better learning of features from image pixels, which can make it easier for a detector to find objects in low-quality images or videos. DCGAN is used to enhance the data and features from objects to make them suitable for detection [
30]. Another main reason for using DCGAN is its conversion from the subspaces of image data, as mentioned by [
31], with a potential dimensionality projection for a better understanding, particularly with respect to hyperspectral images from infrared or night-vision imaging sensors.
Experimental results have shown that the DCGAN framework is able to synthesize realistic images with diversity [
32]. It can be used to add colorization in places where full color is lacking, whereby the DCGAN model can learn to colorize the lacking areas [
33]. By enhancing the colors, it becomes possible to better identify the main features within an image, as lacking colors often lead to missing features, creating the possibility of misdetection. As an example, DCGAN was used to enhance the data in images of tomato leaf disease [
34], with data augmentation being used to recreate the actual data instead of relying on synthetic data.
With the help of DCGAN, it has been suggested that a detector may work better over converted features [
12]. Following our initial work in [
12], further research was carried out and discussed in [
15,
26,
35], and this DCGAN + detector framework was validated in many similar systems such as advanced driver assistance systems [
25]. Similar work was reported by [
33], where a novel small ship detection method was proposed using GAN and YOLOv2. A modified Wassertein generative adversarial network (WGAN) was used in [
34] with a gradient penalty for plant disease detection. To solve the issues in synthetic images for traffic sign detection [
32], complicated images were created using DCGAN, with a small amount of data stored as a solution for a synthetic image. A low-light environment is often encountered in our day-to-day life, and it is evident, in many cases, that low light can have a negative impact on object detection [
35]. DCGAN can help alleviate the challenges in night object detection [
28]. Chen et al. [
33] used GAN for a semi-supervised learning method to deal with both labeled and unlabeled data via semi-supervised learning to extract useful information from labeled and unlabeled data to achieve a reasonable classifier, which can be extrapolated to an object detection task.
2.3. Balancing Dataset
In addition to issues of image quality [
11,
12], another reason for the choice of DCGAN in our work was to handle the unbalanced dataset [
25,
28,
32,
33]. While deep learning is well known for its dependence on a large amount of data, data collection can be heavily unbalanced, suffering from data scarcity in some key cases. In object detection for AUVs, the data from an undersea environment may not be sufficient compared to normal conditions above ground. To address this problem, in our research, we utilized DCGAN [
13] to convert the undersea images, with the aim of making the images more suitable for the object detector, thus providing an alternative solution to the possible issues of imbalanced data [
36]. With such an expectation, we examined, via our experiments, the assumption that DCGAN could alleviate the issues of data scarcity that may undermine the robustness and fairness in object detection.
3. Our DCGAN+SSD Framework
Object detection is considered a major challenge in computer vision despite some success in recent years thanks to recent advances in deep learning technologies [
15]. Among different deep learning architectures, DCGAN is one of most interesting [
12,
28,
30,
31,
32,
33,
34,
35,
36]. The standard architecture of a DCGAN often consists of two parts: a generator which can produce style-enhanced images from low-quality inputs [
12], and a discriminator which aims to verify if the quality of converted images matches with the criteria according to the input [
34].
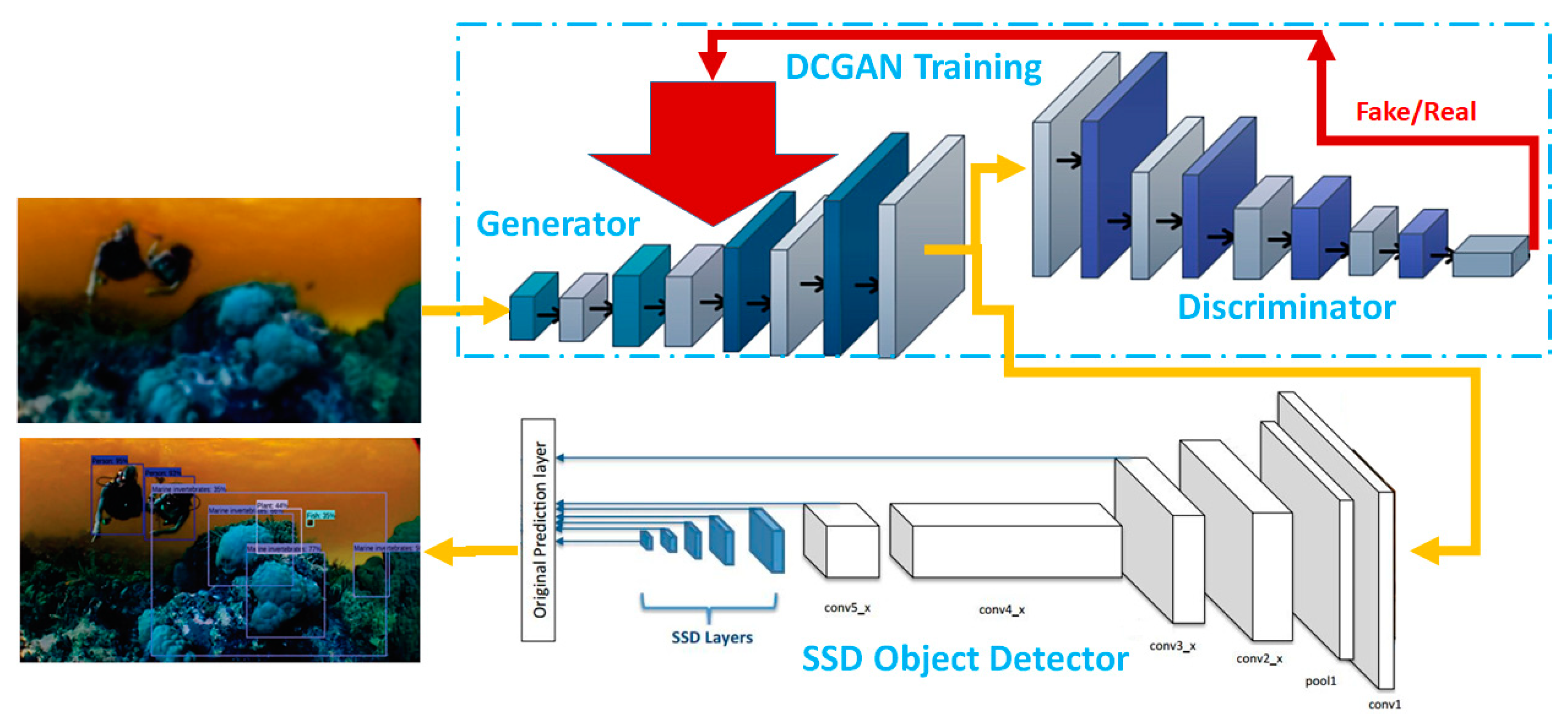
To utilize DCGAN in object detection, we cascaded it with an object detector, as shown in
Figure 3. Here, we used the SSD [
14] as our object detector. Among other candidates, faster RCNN [
15] is a bit older, whereas YOLO [
16] focuses on achieving a low computing time. Our assumption is that such a combination could alleviate the challenges in undersea object detection, which are likely caused by the low image quality and the scarcity of undersea data samples.
In our proposed framework (
Figure 3), the DCGAN generator is trained with its discriminator to produce converted images that are more suitable for object detection. After training the DCGAN, the detector is then applied to detect objects from the converted images, instead of directly evaluating the original images. With such a new cascaded architecture, the aim is to overcome many challenges in object detection caused by hostile conditions such as low image quality and unbalanced datasets.
Here, the loss function of the generator was adjusted to suit our model and application, which can be expressed as
where
α is the weight combining both loss costs,
is the adversary loss, and
is the content loss between the generated image and the original image, which can be computed as the normalization difference shown in the equation below.
is the adversarial loss, as described in the DCGAN [
12,
13],
The loss of the discriminator through adversarial loss can be expressed as,
where the first term is the loss over generated images from the generator, and the second term is the loss over the original high-quality images.
Among various deep learning-based object detectors, YOLO [
16] and SSD [
14] are the two state-of-the-art methods that can quickly capture object regions. We chose SSD as our object detector in this work because we are more concerned with accuracy instead of speed for AUVs. The proposed combination is aimed at improving the detection rates of diverse objects in subsea images or videos by simply taking advantage of the DCGAN generator to produce higher-resolution features of the objects.
The pipeline of the whole architecture (
Figure 3) can be described as follows: first, the input low-quality images are fed into the generator to produce high-quality images, which are then input to the discriminator in the training process. In the test process, the generated quality-improved features are fed to the detector. The SSD, which was employed in this work, was trained using ImageNet. Notably, the SSD detector performance lags in the scale factor, whereas the DCGAN can improvise the scale factor in SSD by providing the detector with enhanced images. In the convolutional detector, each feature layer can produce a fixed set of predictions for detection using convolutional filters. The SSD is associated with a set of bounding boxes with default sizes related to each cell from each feature map. The default size of the bounding boxes is extracted in a convolutional manner using the feature map. The position of each bounding box is related to its size in the cell, and the class indicates the presence of the feature cell in the cell bounding boxes.
5. Experimental Results
To compare and differentiate the results obtained from the PSO-optimized DCGAN+SSD and DCGAN+SSD network, the experimental tests were performed on 23 undersea/subsea videos collected for comparison, with an average of 850 frames extracted per video, yielding a total of 19,550 frames. The model was trained using the CIFAR-100, HAR-DAISY, and ROBOFLOW datasets consisting of a total of 100,000 images belonging to 130 classes, where 70,000 images were considered for training. For testing, we used the videos recorded underseas. This implied a big challenge in cross-dataset validation, which is often a realistic situation in real-world applications. In our experiments, we first compared the test results of our DCGAN+SSD method with the SSD only detection, and then we determined how PSO could further improve the accuracy of the DCGAN+SSD. Our experimental results are detailed below.
5.1. Comparison of DCGAN+SSD with SSD Only
Figure 4 shows the difference between the original images and our DCGAN-enhanced images. Although these images were seemingly similar before and after DCGAN generation, their features were enhanced for object detection. The DCGAN-based approach depends on generative modeling that builds images very closely related to the original images through its generator, and the discriminator co-learns from these generated images by sending feedback to the generator, as illustrated in
Figure 3.
Here, the “enhanced images” refer to the images converted by DCGAN for improved object detection. Although DCGANs can be used for image super-resolution, a high-resolution image does not guarantee a better detection rate if its styles or features are not a fit for the detector.
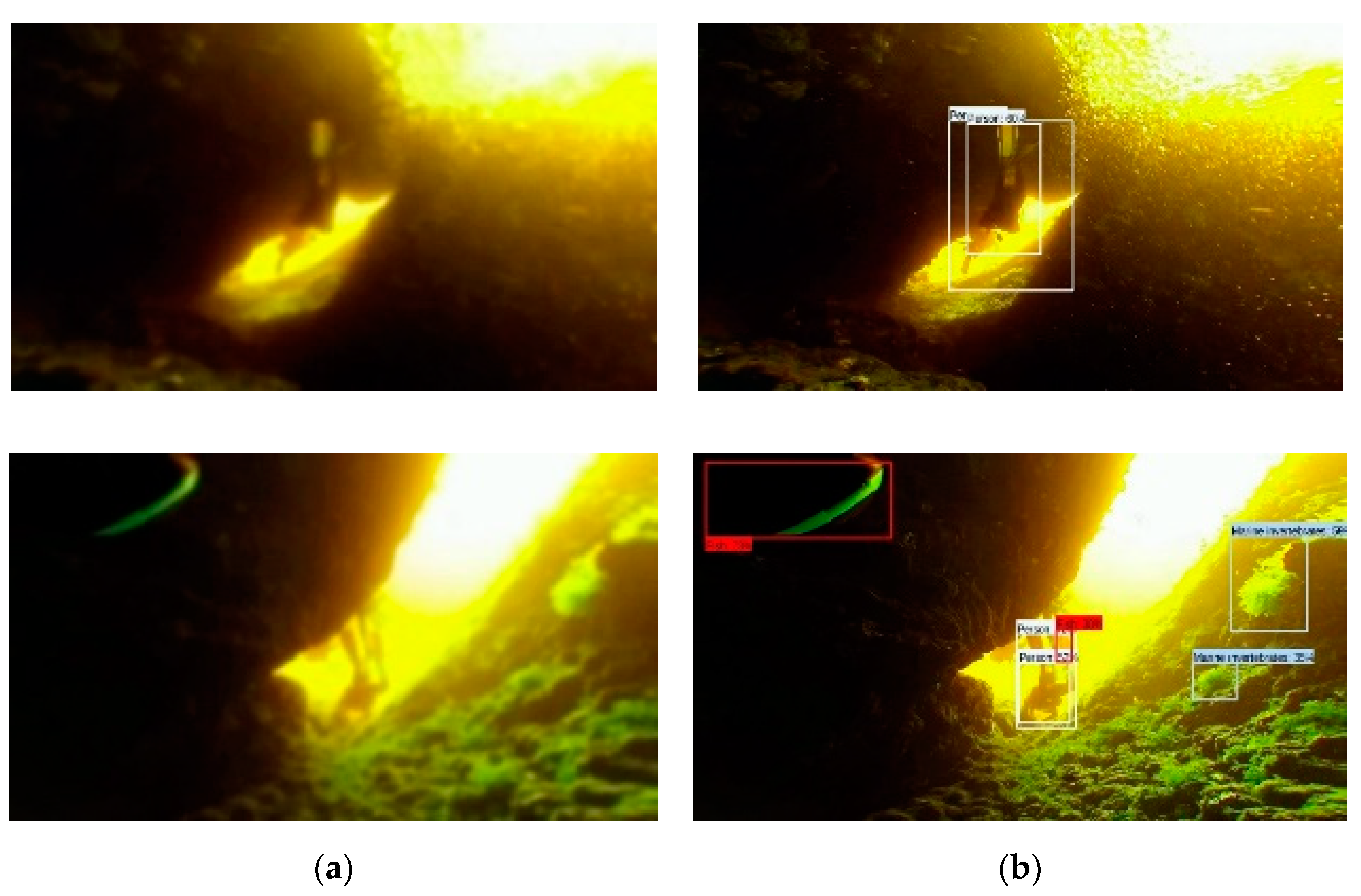
Figure 5 shows the difference in object detection between the SSD only model and our DCGAN+SSD combined model with enhanced object features for the object detection. We can see that only one object was detected by SSD in these four sample images or key frames, as shown in the right column. In comparison, our DCGAN+SSD model, as shown in the right column, could detect most targeted underwater objects.
In our experiment, we chose 230 key frames from the 23 videos at uniform intervals, since most consecutive frames could have been similar to each other in the same videos. Another reason for the reduction in key frames in our tests was to reduce the effort need to manually label all video frames. As most consecutive frames are similar to each other, our evaluation using key frames could cover most different scenes in these videos.
Table 1 shows the results. We can see that the detection was obviously improved by our DCGAN+SSD framework, while the SSD presented a very poor performance on underwater images.
5.2. Our PSO+DCGAN+SSD Model
Object detectors often face loss inefficiency due to incorrect hyperparameters. To improve our model, we introduced PSO to optimize three key hyperparameters, namely, learning rate, momentum, and weight-updating decay.
Table 2 shows the hyperparameters from each particle and their fitting loss in the PSO-based hyperparameter optimization. The training was carried out using the CADDY, ROBOFLOW, and HAR-DAISY datasets, consisting of different images with different light conditions and objects. It is worth noting that these datasets are very different from hostile undersea/subsea conditions. As a result of PSO optimization, we can see that the second particle in
Table 2 represented the best learning process.
One of the main challenges in underwater object detection is background variation. The background varies underwater due to waves, optical diffraction, and various lighting conditions. Another main drawback in underwater object detection is the equipment used, which represents a limitation in most research studies. Obviously, due to data scarcity, we do not have access to large datasets of various hostile undersea conditions, which could be a challenge for our models to address.
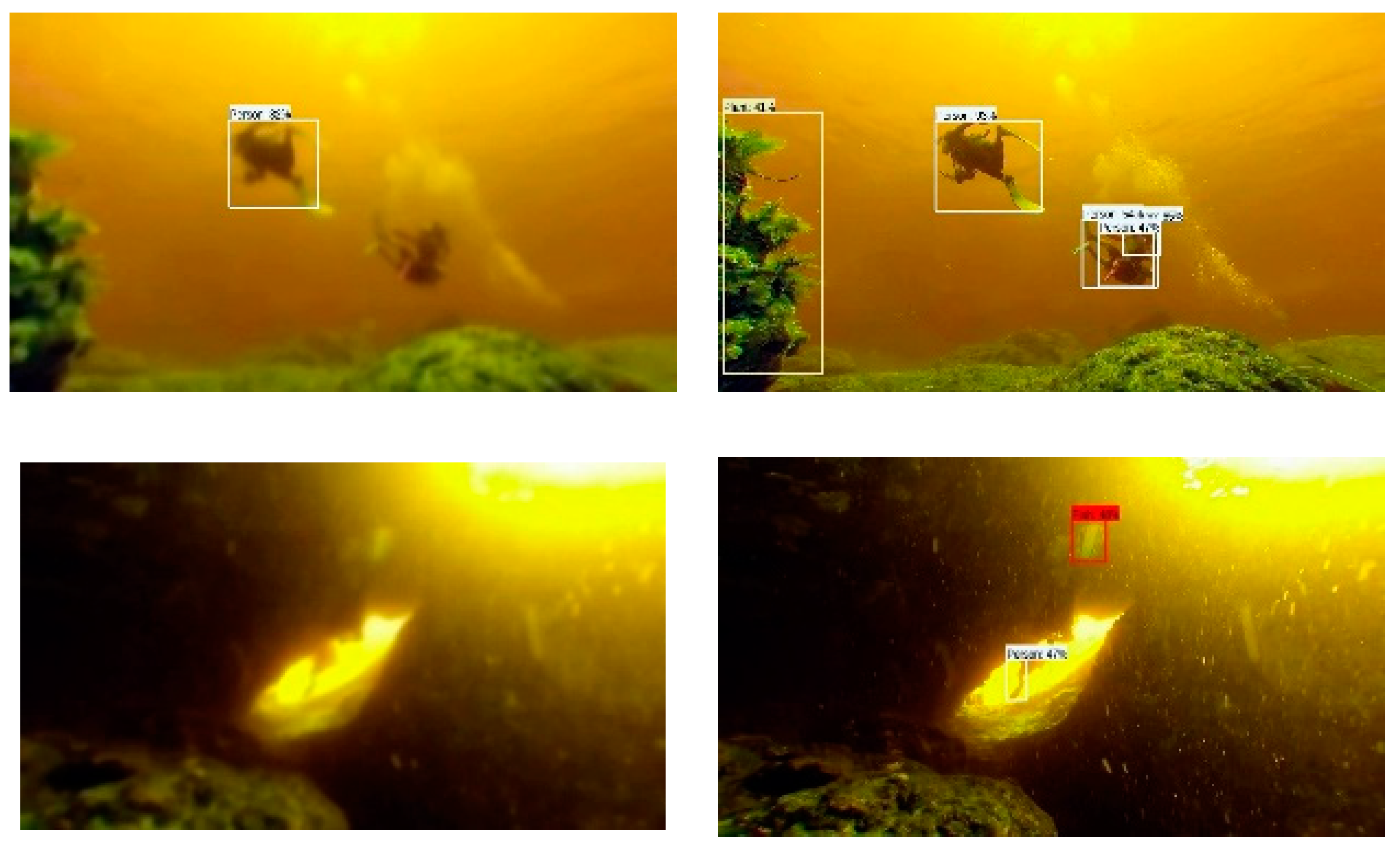
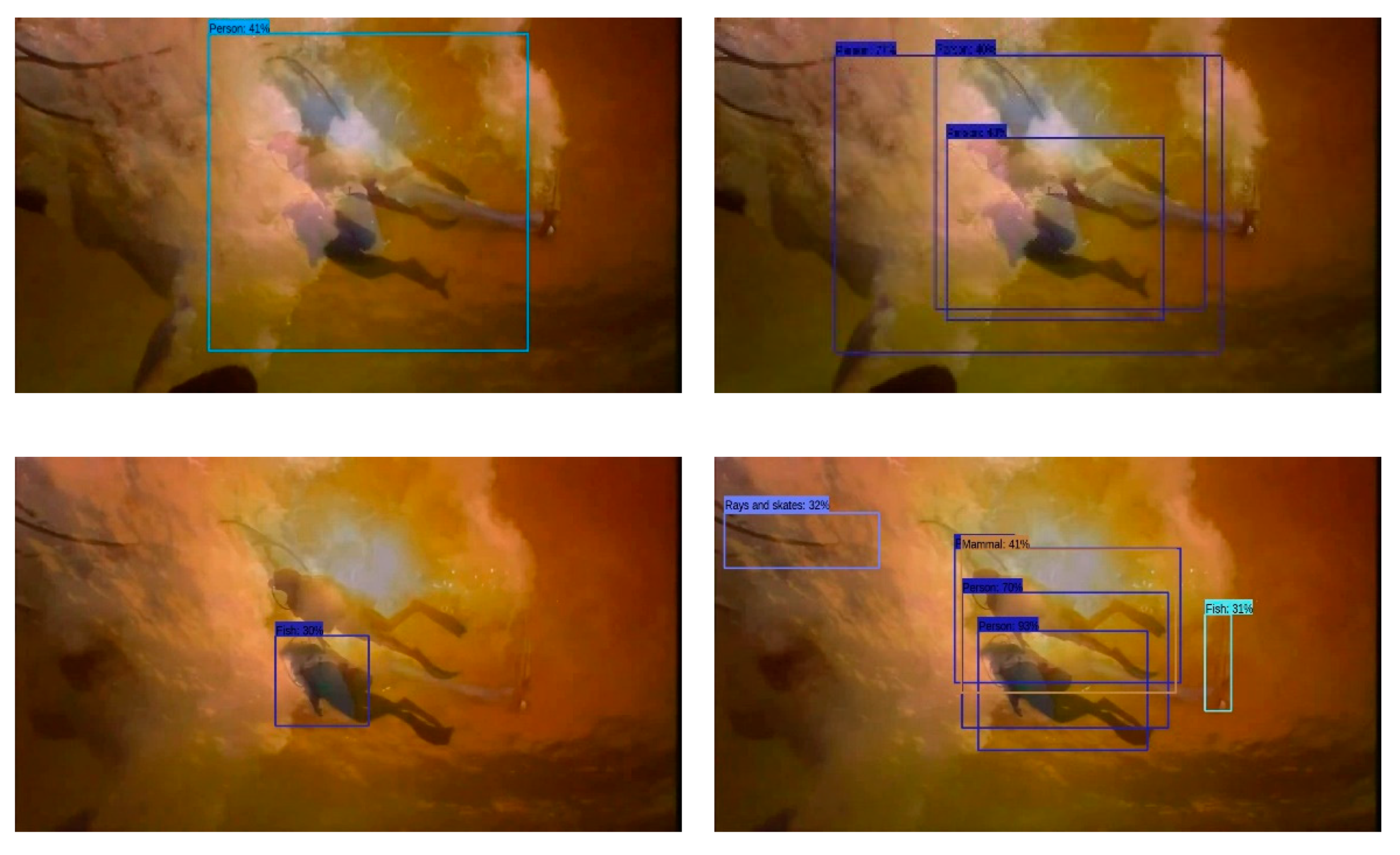
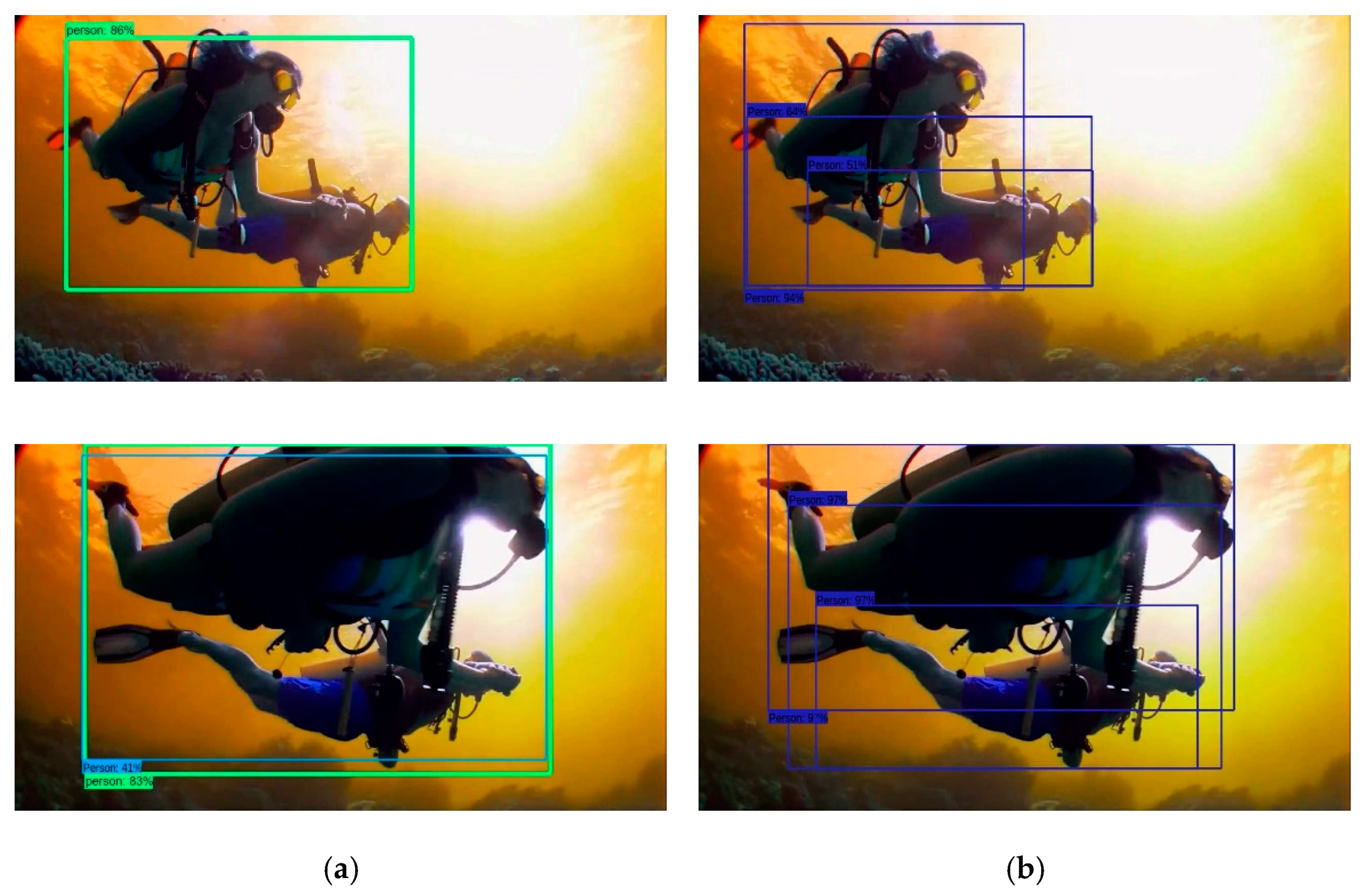
Figure 6 shows the difference in object detection tests before and after PSO-based optimization. From the experimental results, it is clear that our proposed PSO+DCGAN+SSD model could robustly detect more underwater objects, in comparison with the initial DCGAN+SSD model before optimization.
Table 3 shows the results over all key frames, revealing that the initial DCGAN+SSD model achieved detection rates of 81.0% for human subjects (divers), 69.3% for undersea fish, 41.0% for undersea plants, and 23.0% for other objects. We can see there was clearly an unbalanced performance that led to a biased model. After PSO optimization, our PSO+DCGAN+SSD model achieved detection rates of 92.5% for human subjects (divers), 93.0% for undersea fish, 70.0% for undersea plants, and 61.5% for other objects, showing a much more robust and fair detection toward different underwater objects.
Fairness, as principally defined by the Rawlsian algorithm [
29], is a measure to evaluate the merits of the advantaged side over the disadvantaged side. To evaluate how much our PSO-based model could help improve fairness, we used three criteria to evaluate the degree of bias. First, we used the ratio of the max and min accuracy rates for all classes as a criterion to measure the degree of bias of the model.
According to the above formula, if there is no bias, the max and min accuracy rates would be the same, and the ratio bias would be zero, implying no bias.
The second measure used was the absolute difference between the max and min accuracy rates, as defined below.
Similar to the ratio bias, the absolute bias is zero if there is no bias in a model.
The third measure used was the standard deviation of all accuracy rates for all classes, as defined below.
where
Similar to the previous bias measures, the standard bias is zero if there is no bias in a model.
Using the above three criteria, we examined the fairness of our models.
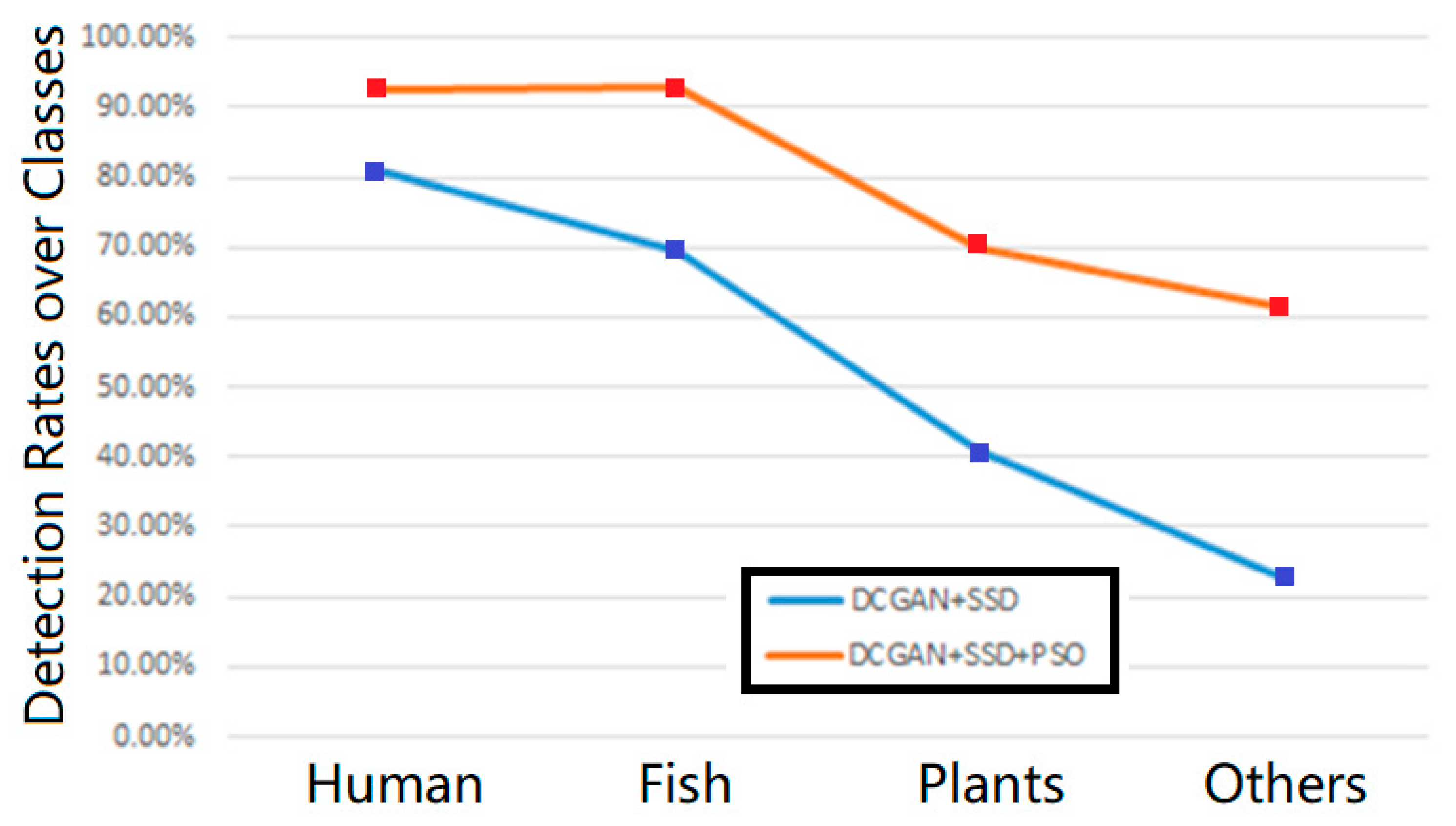
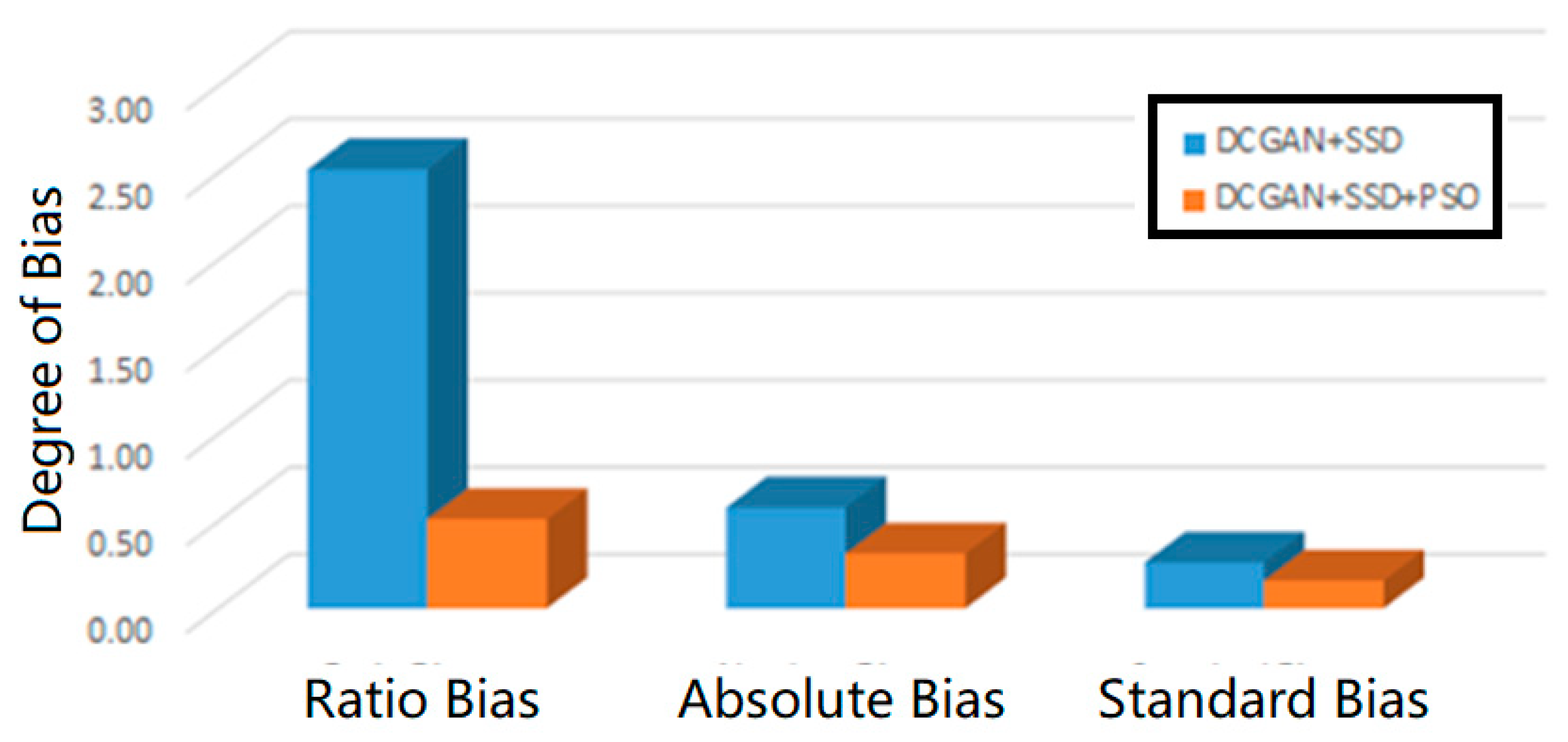
Figure 7 plots the accuracy rates as a visual comparison between the initial DCGAN+SSD model and the optimized PSO+DCGAN+SSD model. According to the accuracy rates and Equations (7)–(10), we could easily calculate the degrees ratio bias, absolute bias, and standard bias. The initial DCGAN+SSD model attained a ratio bias of 2.52, absolute bias of 0.58, and standard bias of 0.26, while the optimized PSO+DCGAN+SSD model achieved a ratio bias of 0.51, absolute bias of 0.32, and standard bias of 0.16. From the visual comparison shown in
Figure 8, we can see that our PSO+DCGAN+SSD model achieved a consistently much lower degree of bias, representing as a robust and fair model in the experiments for all classes according to all three criteria of fairness.
In our simulation, we ran our codes on MATLAB over 4CIF videos. We encountered no problems when processing the input videos in real time (30 frames per second). Although the DCGAN was cascaded with SSD, data processing could be performed in a forward pass, with no apparent delay in speed, whereas we can consider all training to have been performed offline.
In our work, we focused on using underwater cameras. It is worth mentioning that there are various approaches to underwater imaging, such as sonar-based undersea imaging, which has very different features and purposes [
40]. In our future work, we will consider these modalities in our AUV systems and exploit these available technologies in a multimodal way.
6. Conclusions
In conclusion, our work targeted the challenges of undersea and subsea object detection from mounted cameras on automated underwater vehicles (AUVs), aiming to offer a powerful platform for subsea/undersea biodiversity studies by addressing the hostile underwater lighting conditions and the data scarcity on samples of rare species. We examined our proposed cascaded model DCGAN+SSD on the basis of the assumption that the DCGAN could help to convert the input images into a more suitable style for the detector. Our experiments successfully testified our assumption and demonstrated that DCGAN+SSD could handle hostile underwater conditions and achieve better detection rates. Subsequently, we further introduced a PSO-based optimization algorithm to tune the hyperparameters in the DCGAN+SSD model. The experiments proved that such an optimization process could produce a much more robust PSO+DCGAN+SSD model toward underwater object detection. To evaluate the fairness of our models, according to the well-known Rawlsian definition of fairness, we proposed three criteria to measure the degree of bias, namely, ratio bias, absolute bias, and standard bias. Our results clearly showed that the optimized PSO+DCGAN+SSD model not only demonstrated a robust performance in object detection, but also achieved a much better fairness for different objects under hostile underwater conditions, revealing our model as a robust and fair solution for tackling the challenges faced by AUVs.
It is worth noting that, though we validated our assumption that the DCGAN+SSD model could work better than the SSD only model, its underlying theoretical mechanism was not clearly identified. A possible reason for the improved performance is that DCGAN could convert underwater images into styles with features better matching the detector, while both DCGAN and SSD were trained by similar datasets. Such a style conversion could then help overcome the challenges of both the data scarcity of underwater sample images and the low-quality features in underwater conditions. Therefore, although we successfully validated our assumption that DCGAN+SSD could work better than the detector only case for underwater object detection, it is necessary to carry out a deeper theoretical investigation to address this hypothesis, which will be considered in our future work.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}