
Evaluation of BDS/GPS Multi-Frequency RTK Positioning Performance under Different Baseline Lengths


Abstract
:1. Introduction
2. Multi-Frequency RTK Positioning Mathematical Model
2.1. RTK Double-Differenced Measurement Model
2.2. Kalman Filtering Theory for Short Baseline RTK
2.3. Kalman Filtering Theory for Long Baseline RTK Positioning
2.3.1. Double-Differenced Ionosphere Model
2.3.2. Double-Differenced Troposphere Model
2.3.3. Settings in Kalman Filtering for Long Baseline RTK Positioning
2.4. Integer Ambiguity Resolution
3. Data Collection and Processing Strategies
4. Multi-Frequency RTK Positioning Accuracy Analysis
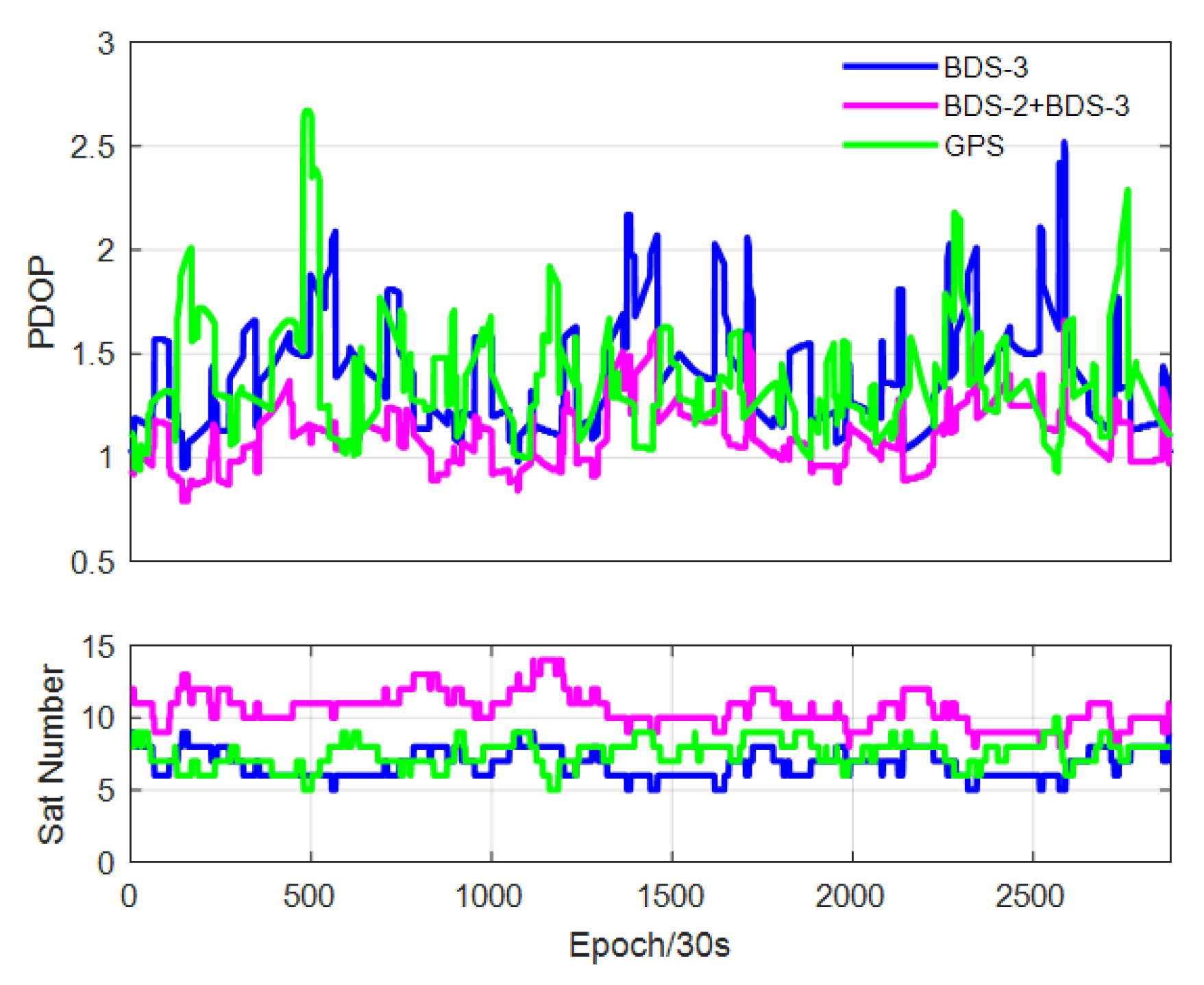
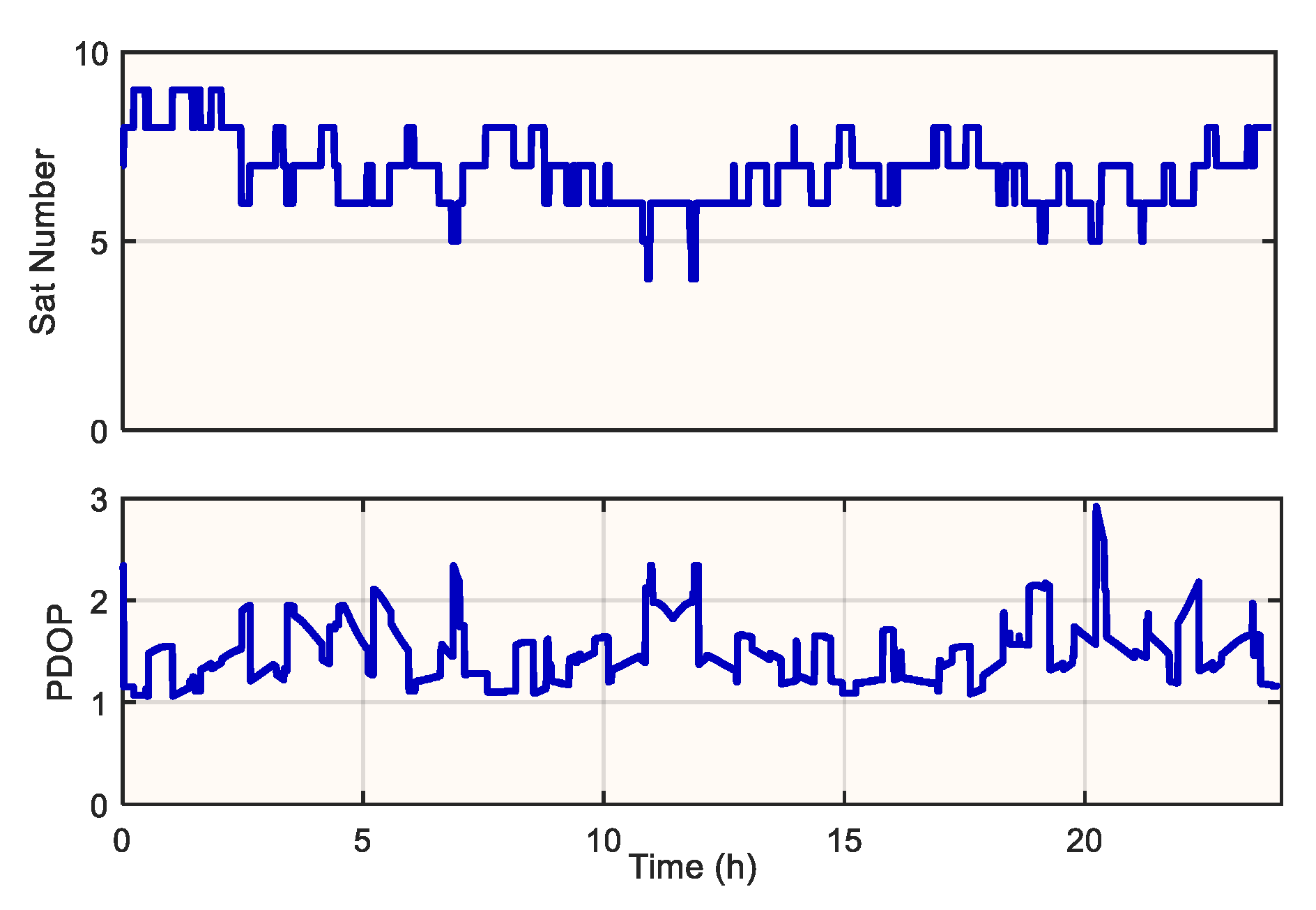
4.1. Number of Satellites and PDOP Values
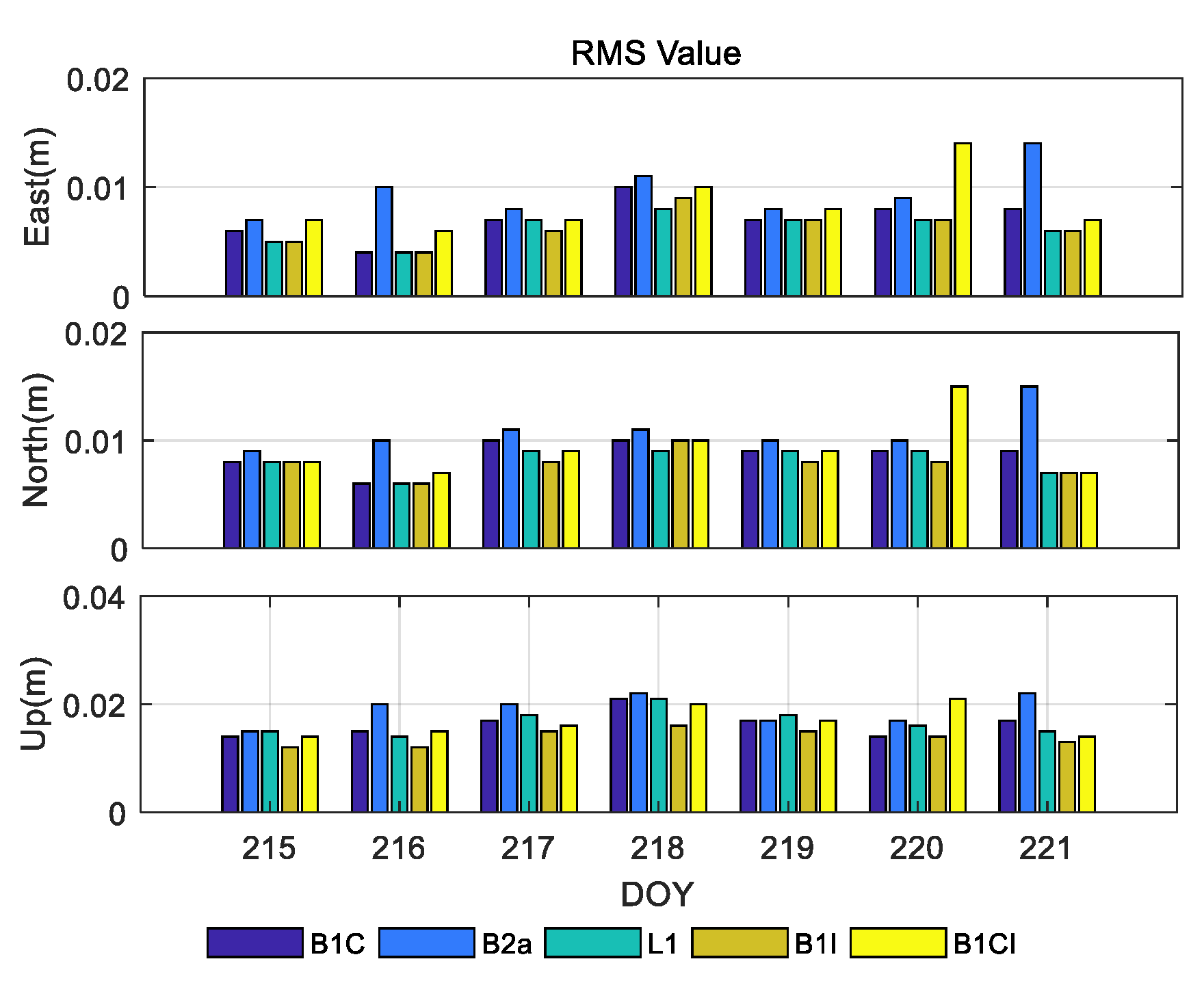
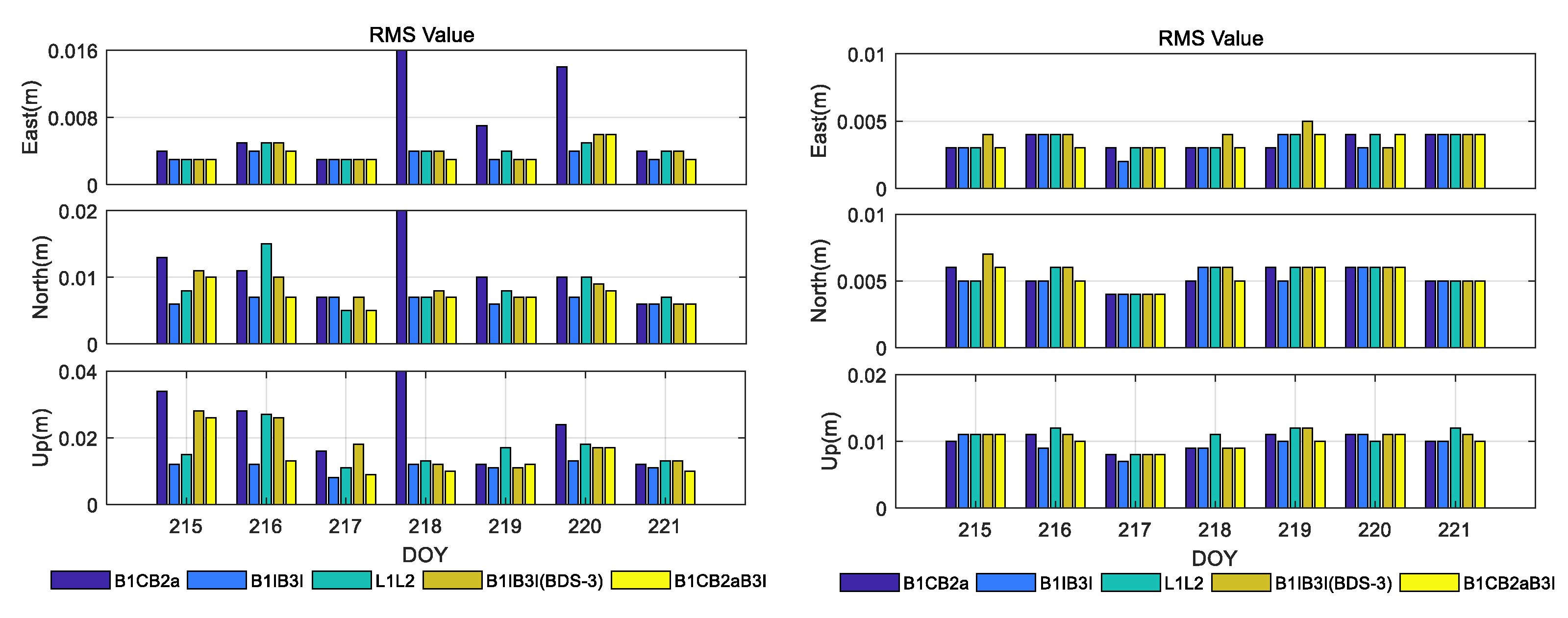
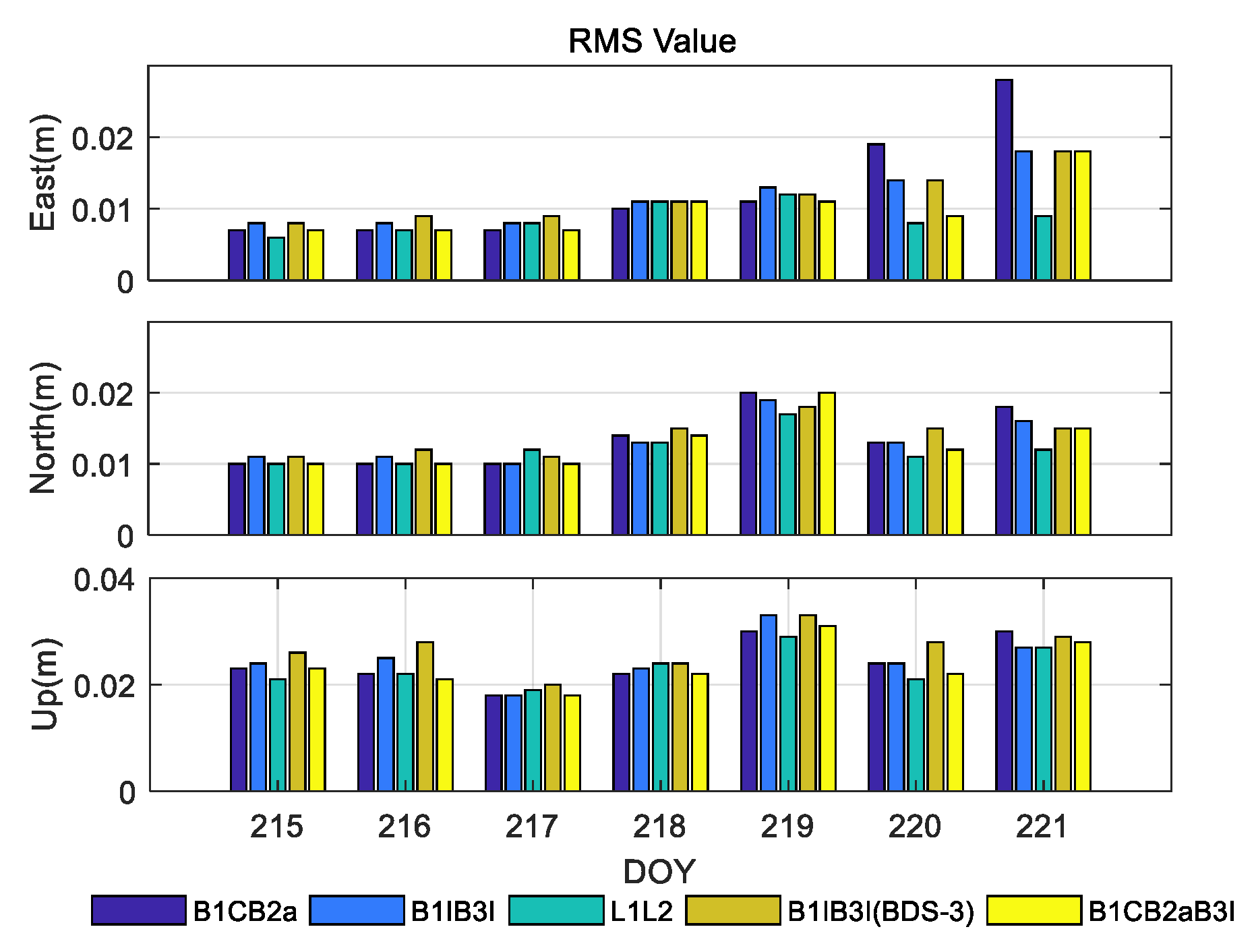
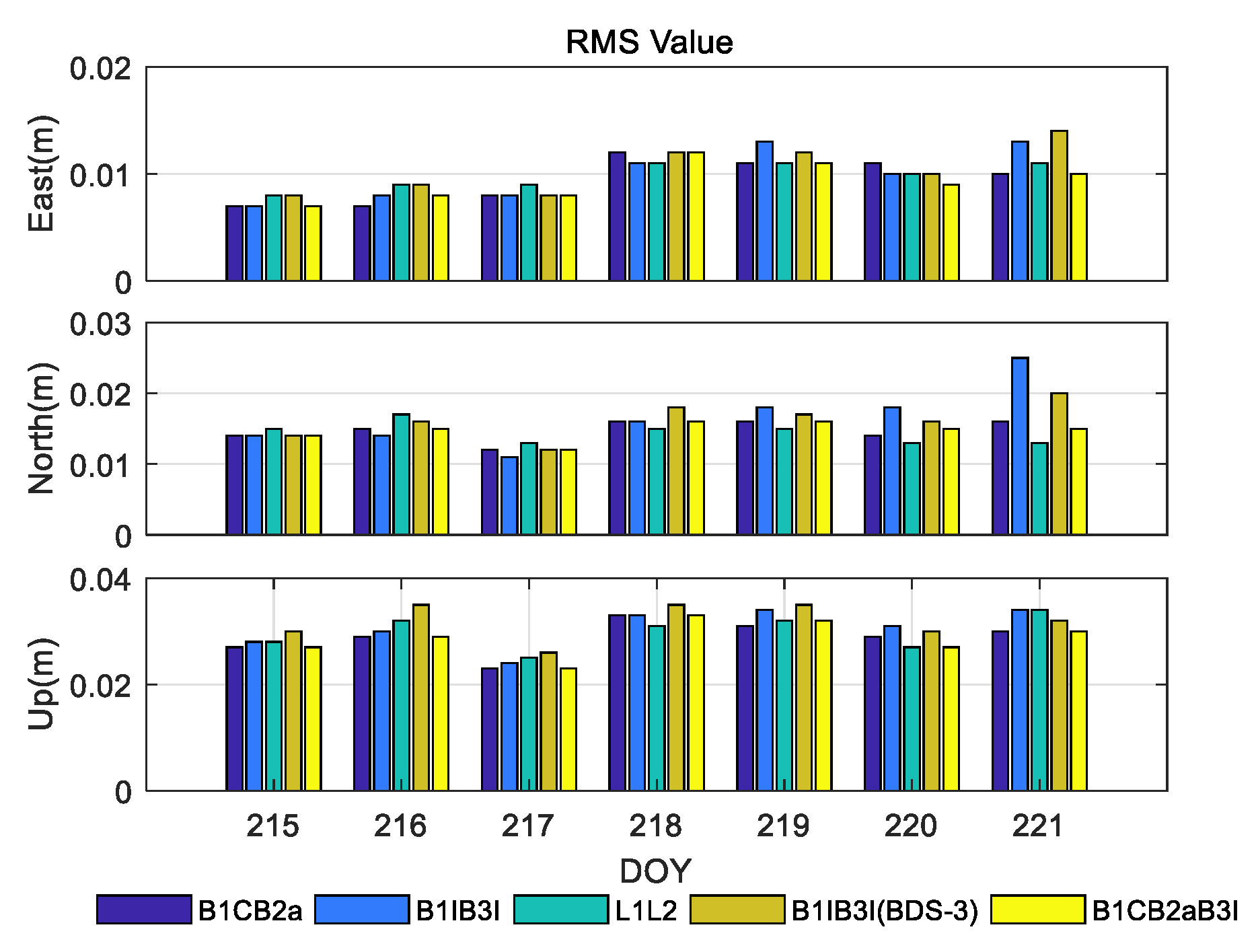
4.2. Positioning Accuracy
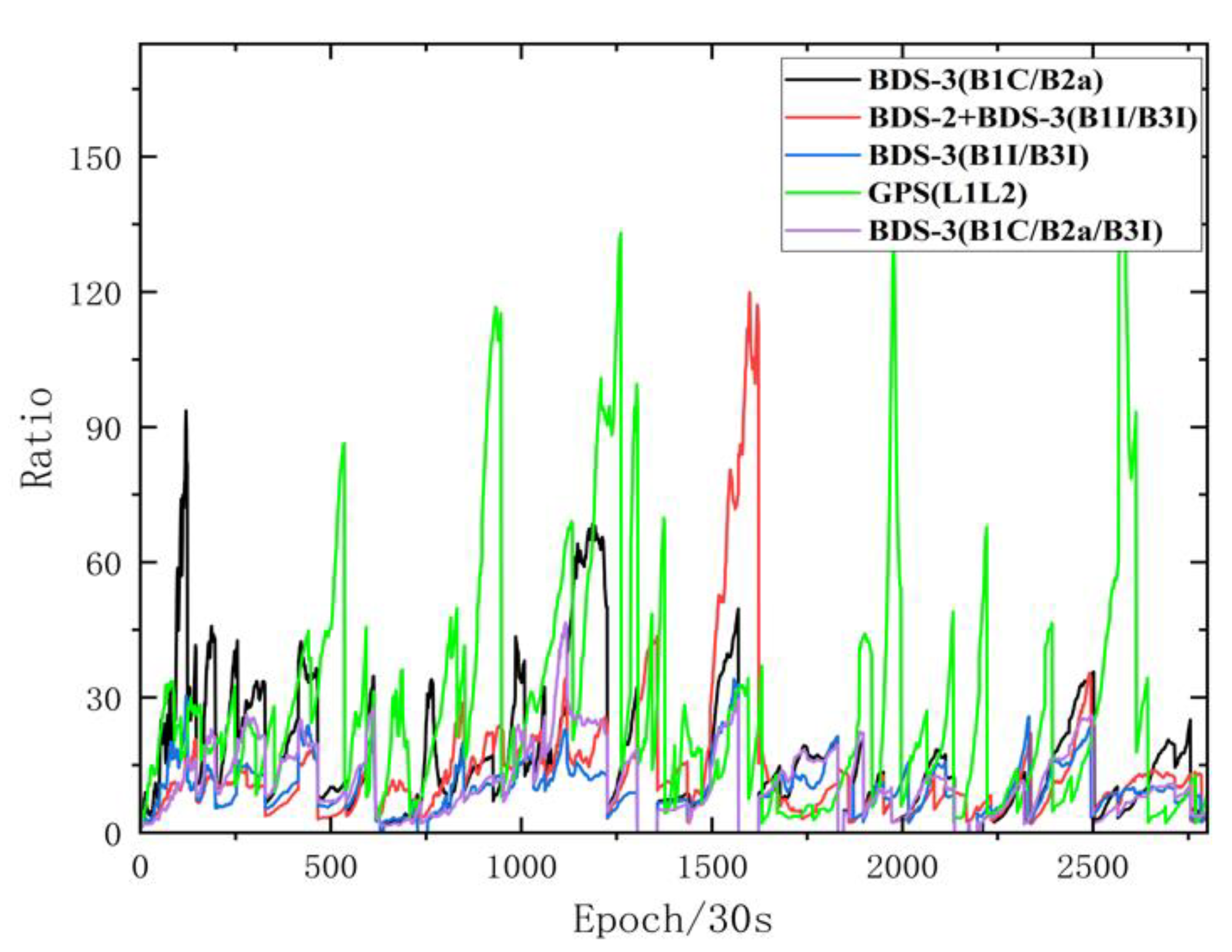
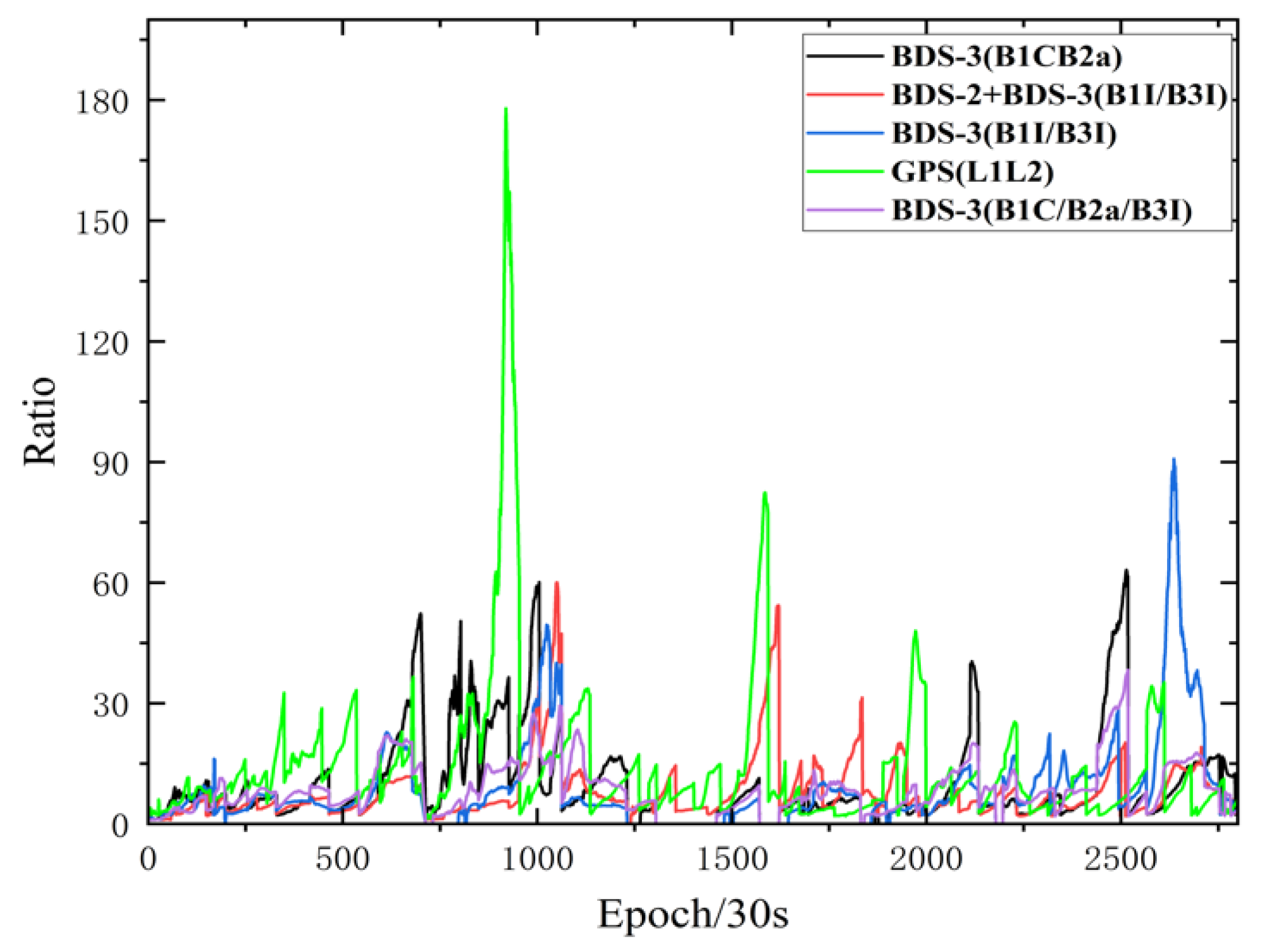
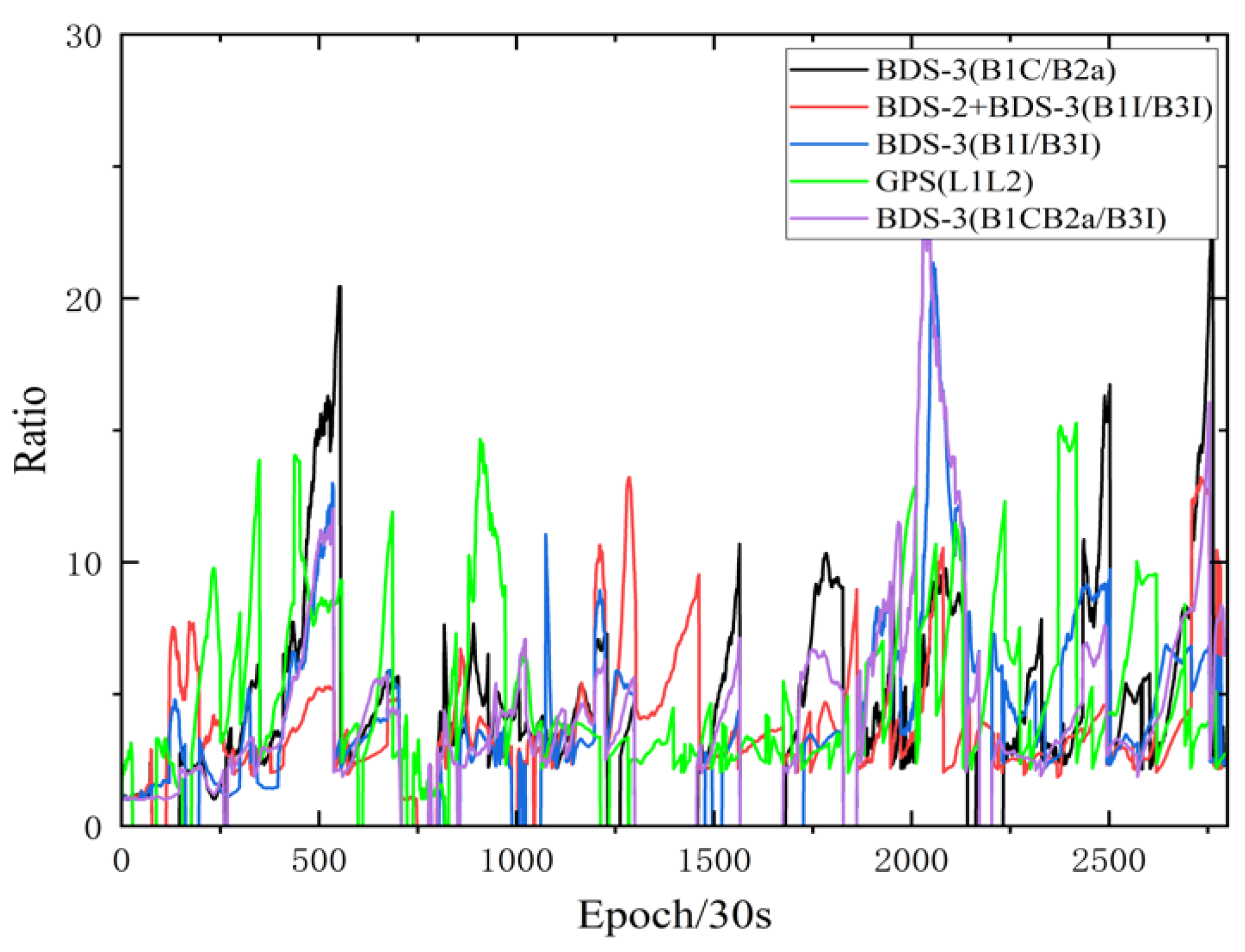
4.3. Ratio-Test
4.4. Time to First Fix
- (1)
- Coordinate deviation in horizontal direction <0.1 m; coordinate deviation in vertical direction <0.2 m.
- (2)
- (3)
- The current epoch and the following nine consecutive epochs all satisfy (1), (2).
5. Conclusions
- The positioning accuracy of BDS-2+BDS-3 (B1I/B3I) dual-frequency RTK has reached a comparable performance to GPS (L1L2) in short baseline RTK and is slightly better than GPS (L1L2) in long baseline RTK.
- The BDS-3 (B1C/B2a/B3I) triple-frequency RTK has the highest positioning accuracy and is higher than BDS-3 (B1C/B2a) and BDS-3 (B1I/B3I) in terms of both positioning accuracy and ambiguity fixing rate. However, the improvement relative to BDS-3 (B1C/B2a) is not significant.
- The positioning accuracies of single-frequency bands B1C, BII, L1, and B3I were about the same, while the accuracy for band B2a was lower.
- As the baseline length increases, the positioning accuracy of the five frequencies decreases, the ratio value becomes smaller, and the TTFF becomes longer.
- The ambiguity fixing rates of GPS (L1L2) and BDS-2+BDS-3 (B1I/B3I) are comparable and are at the highest level among the five frequencies. GPS (L1L2) has the shortest time to first fix and BDS-2+BDS-3 (B1I/B3I) has the second shortest.
- BDS-3 (B1C/B2a) dual-frequency RTK has better than 2 cm positioning accuracy in the N and E directions and better than 3 cm positioning accuracy in the vertical direction within 100 km.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yuanxi, Y.; Li, L.; Jinlong, L.; Yufei, Y.; Tianqiao, Z.; Yue, M.; Bijiao, S.; Xia, R. Featured services and performance of BDS-3. Sci. Bull. 2021, 66, 2135–2143. [Google Scholar]
- Minghua, W.; Jiexian, W.; Danan, D.; Lingdong, M.; Junping, C.; Ahao, W.; Haomeng, C. Performance of BDS-3: Satellite visibility and dilution of precision. GPS Solut. 2019, 23, 1–14. [Google Scholar]
- Junbo, S.; Chenhao, O.; Huang, Y.; Wenjie, P. Assessment of BDS-3 global positioning service: Ephemeris, SPP, PPP, RTK, and new signal. GPS Solut. 2020, 24, 1–14. [Google Scholar]
- Zhang, Q.; Zhu, Y.; Chen, Z. An In-Depth Assessment of the New BDS-3 B1C and B2a Signals. Remote Sens. 2021, 13, 788. [Google Scholar] [CrossRef]
- Weikai, M.; Bofeng, L.; Zhiteng, Z.; Xuewen, Z. Combined BeiDou-2 and BeiDou-3 instantaneous RTK positioning: Stochastic modeling and positioning performance assessment. J. Spat. Sci. 2020, 65, 7–24. [Google Scholar]
- Yunbin, Y.; Xiaolong, M.; Baocheng, Z. Initial assessment of single and dual-frequency BDS-3 RTK positioning. Satell. Navig. 2020, 1, 1–7. [Google Scholar]
- Odijk, D. Weighting ionospheric corrections to improve fast GPS positioning over medium distances. In Proceeding of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 1113–1123. [Google Scholar]
- Takasu, T.; Yasuda, A. Kalman-Filter-Based Integer Ambiguity Resolution Strategy for Long-Baseline RTK with Ionosphere and Troposphere Estimation. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 21–24 September 2010. [Google Scholar]
- Bao, S.; Hui, L.; Xu, L. Performance Analysis of BDS Medium-Long Baseline RTK Positioning Using an Empirical Troposphere Model. Sensors 2018, 18, 1199. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elliott, D.K.; Christopher, J.H. Understanding GPS Principles and Applications, 3rd ed.; Artech House: Norwood, MA, USA, 1996; pp. 308–318. [Google Scholar]
- Bofeng, L.; Yanming, F.; Weiguang, G.; Zhen, L. Real-time kinematic positioning over long baselines using triple-frequency BeiDou signals. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 3254–3269. [Google Scholar]
- Yuanxi, Y.; Weiguang, G. A new learning statistic for adaptive filter based on predicted residuals. Prog. Nat. Sci. 2006, 16, 833–837. [Google Scholar] [CrossRef]
- Ying, X.; Chen, W.; Lei, L.; Lizi, Y.; Min, L.; Shengli, W.X. GPS/BDS medium/long-range RTK constrained with tropospheric delay parameters from NWP model. Remote Sens. 2018, 10, 1113. [Google Scholar]
- Yize, Z.; Kubo, N.; Junping, C. Contribution of QZSS with four satellites to multi-GNSS long baseline RTK. J. Spat. Sci. 2020, 65, 41–60. [Google Scholar]
- Mowlam, A. Baseline precision results using triple frequency partial ambiguity sets. In Proceedings of the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2004), Long Beach, CA, USA, 24 September 2004; pp. 2509–2518. [Google Scholar]
- Verhagen, S.; Teunissen, P.J.G. The ratio test for future GNSS ambiguity resolution. GPS Solut. 2013, 17, 535–548. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, J.; Gong, X.; Chen, Q. The update of BDS-2 TGD and its impact on positioning. Adv. Space Res. 2020, 65, 2645–2661. [Google Scholar] [CrossRef]
- Takasu, T. RTKLIB ver.2.4.2 Manaul. Available online: https://www.rtklib.com/prog/manual_2.4.2.pdf (accessed on 23 July 2022).
- Lemmon, T.R.; Gerdan, G.P. The Influence of the Number of Satellites on the Accuracy of RTK GPS Positions. Aust. Surv. 1999, 44, 67–70. [Google Scholar] [CrossRef]
- Shengli, W.; Yulong, G.; Xiaolin, M. Modelling and Assessment of Single-Frequency PPP Time Transfer with BDS-3 B1I and B1C Observations. Remote Sens. 2022, 14, 1146. [Google Scholar]
- Teunissen, P.J.G.; Odijk, D.; Odolinski, R. A Method of Analysing a Signal Transmitted between A Global Satellite Navigation Satellite System and a Receiver. WO PCT/AU2016/050951, 10 October 2016. [Google Scholar]
- Shaoshi, W.; Xiubin, Z.; Liang, Z.; Chunlei, P. Improving reliability and efficiency of RTK ambiguity resolution with reference antenna array: BDS+GPS analysis and test. J. Geod. 2019, 98, 1297–1311. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Station | Antenna Type | Receiver Type |
|---|---|---|
| BORJ | LEIAR25.R4 | JAVADTRE_3 DELTA |
| TGBF | LEIAR25.R4 | LEICA GR50 |
| TGD2 | LEIAR25.R4 | LEICA GR50 |
| TGCU | LEIAR25.R4 | LEICA GR50 |
| TGBU | LEIAR25.R4 | LEICA GR50 |
| TGDA | LEIAR25.R4 | LEICA GR50 |
| METG | TRM59800.00 | SEPT POLARX5 |
| MET3 | JAVRINGANT_DM | JAVAD TRE_3 DELTA |
| Baseline | Baseline Length | Integer Ambiguity Resolution [18] |
|---|---|---|
| BORJ–TGBF | 6 km | Continuous |
| METG–MET3 | 3 km | Instantaneous |
| TGCU–TGBU | 30 km | Continuous |
| TGDA-TGCU | 96 km | Continuous |
| TGD2-TGCU | 128 km | Continuous |
| Option | Setting |
|---|---|
| Elevation Mask | |
| Satellite Ephemeris | Broadcast |
| Tropospheric zenith wet delay | Estimated as random walk parameter |
| Tropospheric zenith hydrostatic delay | Saastamoinen model |
| Initial ionospheric delay | Klobuchar model |
| Residual ionospheric delay | Estimated as random walk parameter |
| Earth Rotation | Model Correction |
| Relativistic Effects | Model Correction |
| Integer Ambiguity Resolution | Partial Fixing/LAMBDA |
| Parameter Estimation | Kalman Filter |
| Frequency | Fixing Rate | RMS | ||
|---|---|---|---|---|
| N (m) | E (m) | U (m) | ||
| B1C | 97.73% | 0.008 | 0.007 | 0.017 |
| B2a | 97.21% | 0.013 | 0.012 | 0.020 |
| B1I | 99.83% | 0.008 | 0.006 | 0.016 |
| B3I | 99.83% | 0.008 | 0.007 | 0.017 |
| L1 | 99.82% | 0.009 | 0.008 | 0.017 |
| Frequency | Fixing Rate | RMS | ||
|---|---|---|---|---|
| N (m) | E (m) | U (m) | ||
| B1C/B2a | 97.68% | 0.010 | 0.006 | 0.021 |
| B1I/B3I | 100.00% | 0.007 | 0.003 | 0.011 |
| L1L2 | 99.60% | 0.008 | 0.004 | 0.017 |
| B1I/B3I(BDS-3) | 98.18% | 0.008 | 0.005 | 0.020 |
| B1C/B2a/B3I | 98.30% | 0.007 | 0.003 | 0.013 |
| B1C/B2a | 98.49% | 0.005 | 0.003 | 0.010 |
| B1I/B3I | 100.00% | 0.005 | 0.003 | 0.010 |
| L1L2 | 99.96% | 0.005 | 0.004 | 0.011 |
| B1I/B3I(BDS-3) | 98.43% | 0.006 | 0.004 | 0.011 |
| B1C/B2a/B3I | 98.49% | 0.005 | 0.003 | 0.010 |
| Frequency | Fixing Rate | RMS | ||
|---|---|---|---|---|
| N (m) | E (m) | U (m) | ||
| B1C/B2a | 93.53% | 0.014 | 0.013 | 0.024 |
| B1I/B3I | 99.44% | 0.014 | 0.011 | 0.025 |
| L1L2 | 99.59% | 0.012 | 0.008 | 0.024 |
| B1I/B3I(BDS-3) | 93.07% | 0.014 | 0.012 | 0.027 |
| B1C/B2a/B3I | 93.65% | 0.013 | 0.010 | 0.024 |
| Frequency | Fixing Rate | RMS | ||
|---|---|---|---|---|
| N (m) | E (m) | U (m) | ||
| B1C/B2a | 92.29% | 0.015 | 0.009 | 0.029 |
| B1I/B3I | 97.69% | 0.017 | 0.010 | 0.030 |
| L1L2 | 99.13% | 0.015 | 0.010 | 0.030 |
| B1I/B3I(BDS-3) | 89.09% | 0.016 | 0.010 | 0.033 |
| B1C/B2a/B3I | 92.68% | 0.014 | 0.009 | 0.028 |
| Frequency | Fixing Rate | RMS | ||
|---|---|---|---|---|
| N (m) | E (m) | U (m) | ||
| B1C/B2a | 81.80% | 0.021 | 0.018 | 0.043 |
| B1I/B3I | 90.86% | 0.021 | 0.022 | 0.046 |
| L1L2 | 89.00% | 0.023 | 0.020 | 0.053 |
| B1I/B3I(BDS-3) | 74.06% | 0.025 | 0.024 | 0.050 |
| B1C/B2a/B3I | 84.68% | 0.016 | 0.017 | 0.040 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, E.; Song, W.; Zhang, Y.; Shi, X.; Wang, Z.; Xu, S.; Shu, W. Evaluation of BDS/GPS Multi-Frequency RTK Positioning Performance under Different Baseline Lengths. Remote Sens. 2022, 14, 3561. https://doi.org/10.3390/rs14153561
Wang E, Song W, Zhang Y, Shi X, Wang Z, Xu S, Shu W. Evaluation of BDS/GPS Multi-Frequency RTK Positioning Performance under Different Baseline Lengths. Remote Sensing. 2022; 14(15):3561. https://doi.org/10.3390/rs14153561
Chicago/Turabian StyleWang, Ershen, Wei Song, Yize Zhang, Xiaozhu Shi, Zhi Wang, Song Xu, and Wansen Shu. 2022. "Evaluation of BDS/GPS Multi-Frequency RTK Positioning Performance under Different Baseline Lengths" Remote Sensing 14, no. 15: 3561. https://doi.org/10.3390/rs14153561
APA StyleWang, E., Song, W., Zhang, Y., Shi, X., Wang, Z., Xu, S., & Shu, W. (2022). Evaluation of BDS/GPS Multi-Frequency RTK Positioning Performance under Different Baseline Lengths. Remote Sensing, 14(15), 3561. https://doi.org/10.3390/rs14153561