
Pico-Sat to Ground Control: Optimizing Download Link via Laser Communication



Abstract
:1. Introduction
1.1. Related Work
1.2. Motivation
1.3. Our Contributions
1.4. Paper Structure
2. Physical Components and Methods
2.1. Components of the Ground Station
- Telescope. Designed for tracking the satellite.
- Laser beam with a high-speed modulator. The laser notifies and marks the ground station’s location so that the satellite can adjust its orientation directly to it. After adjusting the satellite’s orientation, the optical link can be created.
- Camera. A wide field of view (FOV) camera for accurate tracking. The FOV of the telescope’s lens is very narrow, making it hard to create the initial link and perform fast tracking accurately. However, a wide-angle camera stationed and calibrated on the telescope can detect the satellite’s position and enable the telescope’s tracking.
- Laser communication transmitter and receiver. Enables FSO communication between the ground station and the satellite.
- Image processing. An image processing component is required for detecting the satellite in the images of the camera and the telescope. This component enables fast-tracking and location prediction even in cases in which the satellite is hidden (e.g., clouds).
2.2. Components of the Satellite
- Standard satellite unit. This unit contains (i) a lithium battery and a solar panel that provides and preserves the satellite’s energy; (ii) a micro-controller board that controls the different components of the satellite. This controller is in charge of commands to start UHF or laser communication, open the camera, and track the ground station. This board is also programmed to schedule the satellite’s full-power and power-save modes according to the communication demand and distance from the ground station.
- FSO communication unit. This unit contains two communication components: (i) UHF radio; (ii) FSO laser beam and LED light that signals to the ground station the location and orientation of the satellite.
- Tracking unit. This unit contains all the components that allow the satellite attitude control. It includes reaction wheels that perform the satellite’s aiming towards a target, two sensors that provide the data for the tracking, a camera, and an inertial measurement unit (IMU). Accurate high-frequency tracking is accomplished via an algorithm that fuses the data from the camera’s image and the self-orientation provided by the IMU.
2.3. FSO Communication—The Ground Station’s Side
- Coarse tuning: adjusting the telescope angle to the area where the satellite should pass. There, it waits for the satellite to continue tracking it.
- Accurate tracking: creating a continuous communication link between the telescope and the satellite using image processing for precise attitude control.
- Continuous link: using motion prediction to create accurate, high-quality tracking.
2.3.1. Coarse Tuning
2.3.2. Accurate Tracking
- Detect the satellite in the image.
- Compute deviation from the image’s center.
- Reorient the telescope so that the satellite appears in the lens.
2.3.3. Prediction
2.4. FSO Communication—The Satellite’s Side
- S performs a coarse alignment to and turns on the LED.
- detects and tracksS and turns on its laser beacon.
- S detects the laser (of ) and accurately aims itself towards .
- S turns on its FSO laser and starts the data transmission.
- signals to S an FSO feedback with its laser beacon, using a very low data rate.
- Coarse alignment. The satellite aims itself roughly at the region of the ground station. For performing an Earth-pointing rough alignment, see [30].
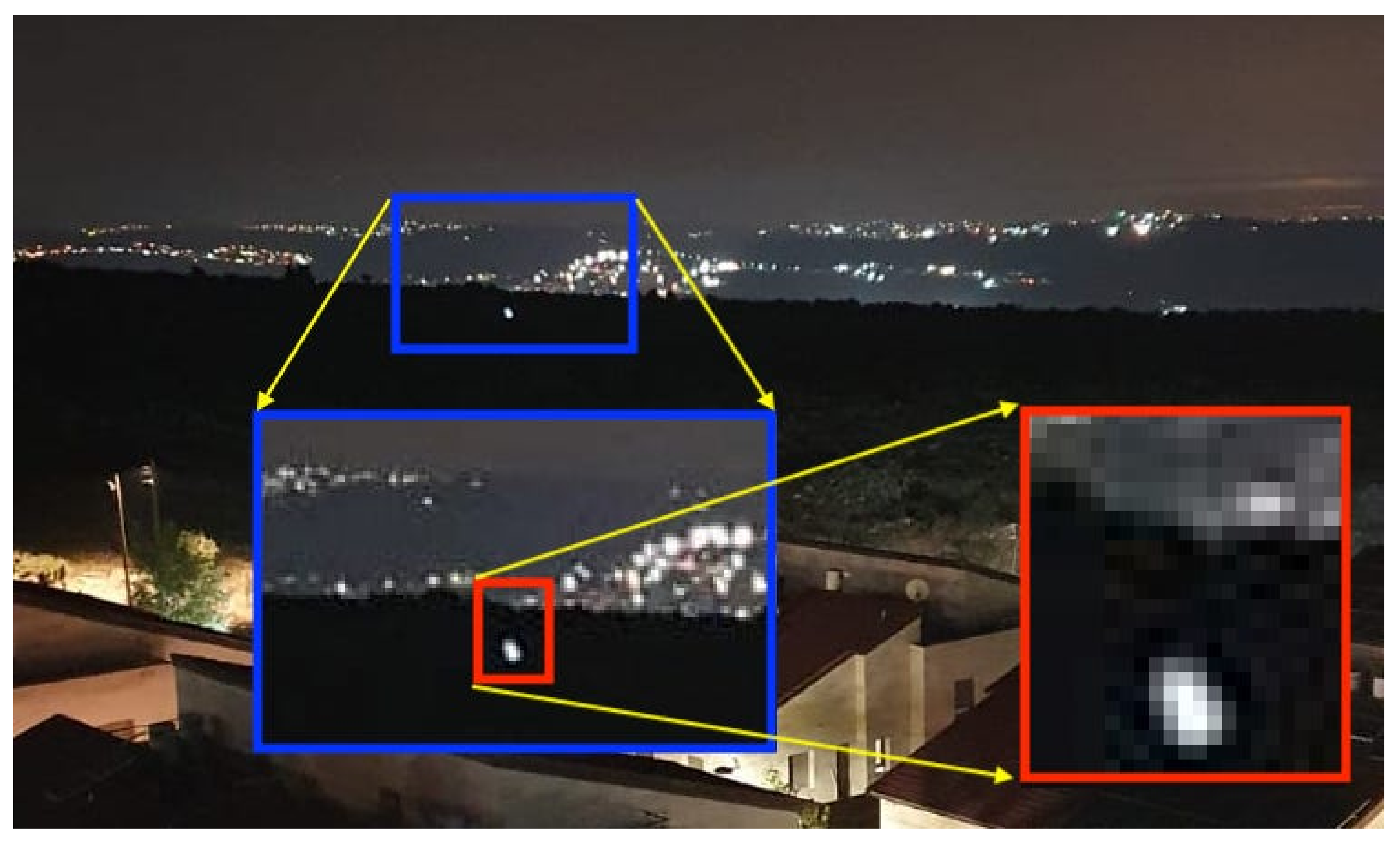
- Detection and tracking.Figure 7 demonstrates a laser beacon ground experiment. The detection process (in this case) is rather straightforward. Yet, when the beacon is relatively weak, we use both the blinking rate and the laser’s frequency (color) to increase the signal-to-noise ratio (SNR) of the laser beacon.
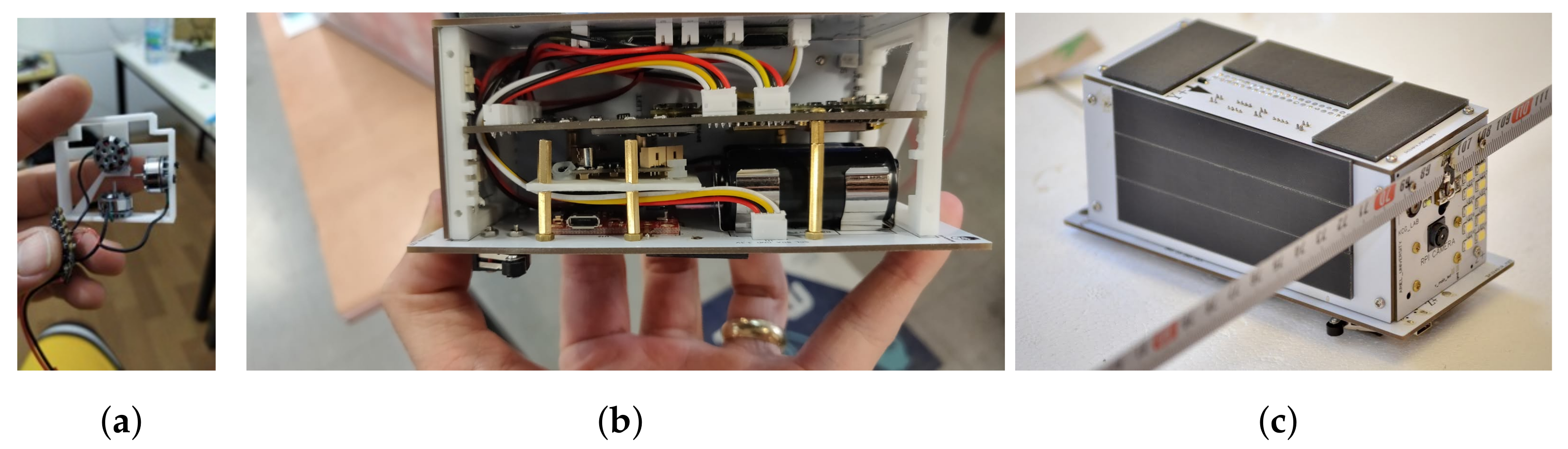
- Accurate aiming.Figure 8 shows the attitude control determination of the satellite, which is composed of three reaction wheels, an IMU, and a beacon-detection sensor (based on a wide-angle camera).
- FSO feedback. The ground station may signal back to the satellite (using the laser beacon) low bandwidth information regarding the quality of the FSO link. In particular, the following types of information are passed: packet drop rate, suggested optimal modulation, and time to expected non-line-of-sight (NLOS).
3. Satellite Scheduling by a Ground Station
4. Results
4.1. Link Budget for FSO Nano-Satellite
4.1.1. Photon-Counting Laser Link-Budget Analysis
- A standard 1 mW laser induces about photons per second.
- Existing sensitive detectors, i.e., avalanche photodiode (APD), have a ratio threshold of 100–300 photons per bit [40]. In such ratio, a bit error rate of is expected (without forward error correction).
- Assuming the transmitter has a bit rate of 10 Mbps and power of mW, the transmitter emits photons per bit.
- Based on the geometric ratio of , the telescope is expected to receive 3200 photons per bit in optimal conditions.
- The atmospheric losses () and the telescope losses () are bounded by , allowing about 800 photons per bit; this should be sufficient for a robust and high-bandwidth FSO link between a nano-satellite and a ground station.
4.1.2. Photon-Counting LED Link-Budget Analysis
- A single Lumen equals photons per second.
- An LED, as used in smartphones’ flash and in the discussed pico-satellite-SATLLA-2B, induces about 60 Lumen (lm), which is photons per second.
- SATLLA-2B has an array of 10 LEDs, such a combined array induces about 600 lm which is photons per second.
- The angle of the LED FoV (field of view) is about 60 degrees and the satellite distance from Earth is about 500 km ( m). Yet, in order to perform an FSO communication, a distance of 1000 km is assumed, which leads to an area of m.
- The telescope width is assumed to be , which has an area of about m.
- Therefore, the geometric ratio between telescope area and the emitted area on ground is about .
- Based on the geometric ratio, the telescope is expected to receive photons in optimal conditions.
- The atmospheric loss () and the telescope loss () are assumed to be about 3 dB () each (or about combined), allowing about photons per seconds received in the the telescope detector.
- Using a sensitive optical detector (with expected ratio of 100 photons for bit, and header overhead), a bit rate of 500 bits per second is expected.
- Finally, a sensitive camera mounted on the telescope should be able to detect the pico-satellite and estimate the actual FSO path loss and link budget.
4.1.3. RF Link-Budget Analysis
4.1.4. FSO Overhead Analysis
4.2. Reaching 1 Gbps FSO Link from a Pico-Satellite
- Using high-efficiency InGaAs-biased detectors with a noise-equivalent power (NEP) as low as ( per ) at 1550 nm. Such detectors have a typical rise time of ∼100 picoseconds allowing up to 5 GHz detection (suitable for 1 Gbps data rate). Additional 5× speedup bit rate may be obtained through improved quantum efficiency (i.e., less photons are required per bit).
- A larger 30″-lens telescope with a high-end narrow band-pass filter to minimize the noise. Using such a telescope may increase the SNR significantly, allowing an additional speedup of 4×–5× times.
- Finally, using a narrower (0.5 milliradian) and stronger (say, 1 Watt) laser beam, an additional 5× speedup may be achieved.
4.3. Performance Evaluation of SATLLA-2B
- Performing an independent experiment on each component, e.g., ground station, satellite, swarm of satellites.
- Ground station photon efficiency: A lab experiment was performed in order to validate the expected loss on the telescope. A known source of light was aimed towards the telescope (the laser beam was entirely within the telescope’s field of view). On the telescope, a fiber optic was attached to the receiver adaptor. The received power at the fiber was measured to be at most 3 dB lower than the original laser power. We conclude that the overall power loss of the telescope can be assumed to be smaller than 3 dB (no more than ; in most cases, an efficiency of above was achieved).
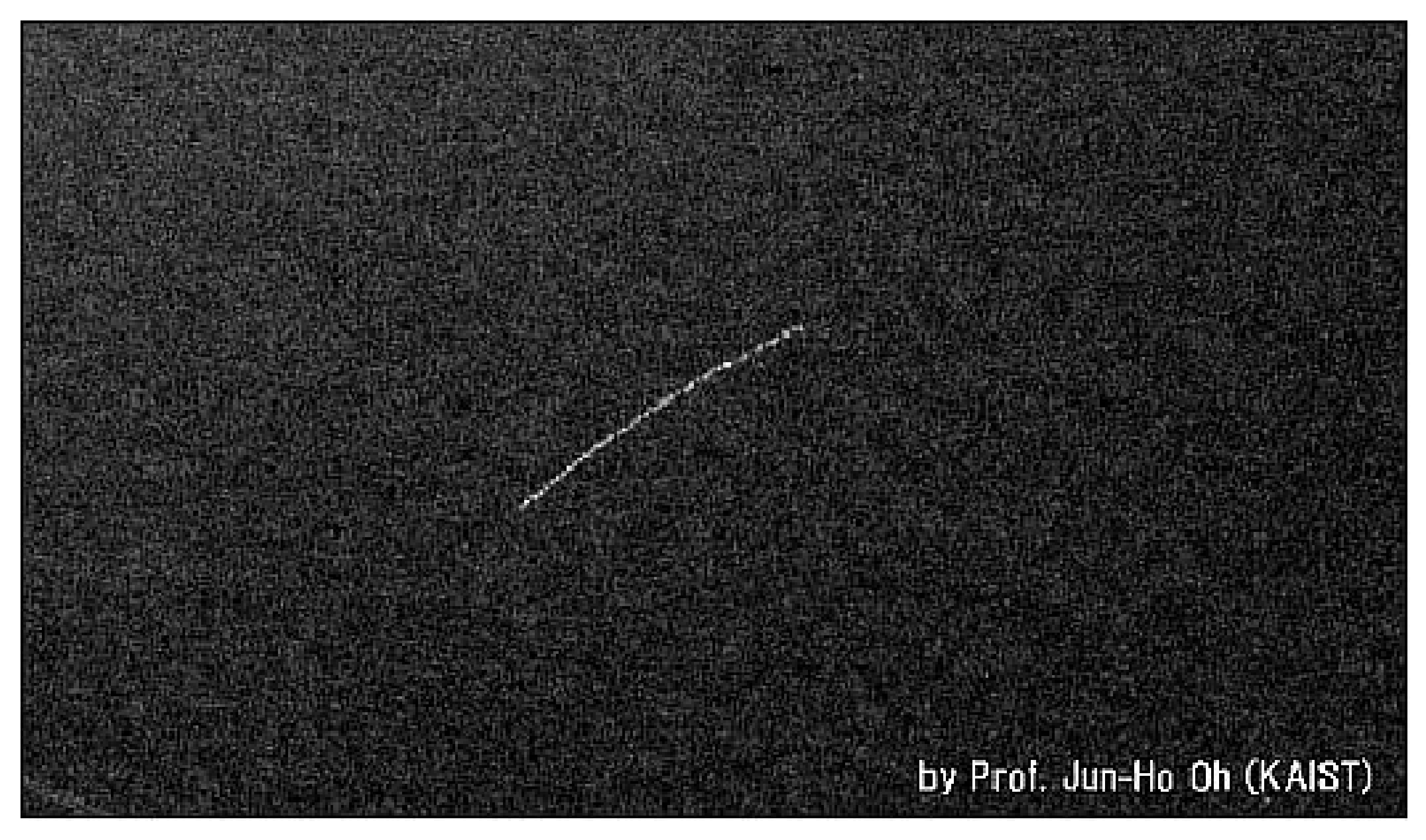
- Ground station tracking: The tracking was performed using the ISS as a moving target (see Figure 5b). It is important to mention that two independent ISS tracking experiments were performed in suboptimal atmosphere conditions (central Israel in June and July 2021). In both experiments, a calibrated robotic telescope was able to track the ISS orbit using only time-based reference (without optical tracking). This allowed us to conclude that the expected aiming errors due to atmospheric turbulence are minor and have very limited effect on the performance of FSO from a ground station (the overall turbulence errors were lower than 0.01 degrees, whereas the telescope’s field of view is 0.5–1.0 degrees). See [43] for detailed research regarding methods for adapting FSO links to atmospheric turbulence. Based on the ability to accurately track the satellite and assuming a clear night sky, the turbulence loss () is expected to be bounded by 1 dB.
- Performing ground experiments: We conducted a set of FSO ground experiments. These experiments were performed without a telescope in order to simulate a greater distance (from the satellite). Both the and were equal to or greater than expected in the satellite FSO scenario (which assumes a clear night sky, as opposed to the “noisy” ground conditions).
- Using existing FSO system analysis: As presented in the related works, satellite FSO has already been demonstrated several times. Therefore, we mainly focus on generalizing existing solutions, so as to make them applicable for swarms of pico-satellites and a corresponding large set of optical ground stations.
4.4. SATLLA-2B’s Flight Result
Negative Results of SATLLA-2B
5. Discussion and Future Work
- Most satellites will not communicate directly with Earth, but will instead use ISM channels (e.g., LoRa 2.4 GHz) in order to perform inter-satellite low-speed communication to FSO satellites.
- The FSO satellites will aggregate the packages received by the RF ISM channel and will perform a rapid FSO download when in view of an FSO ground station. From the ground station, the packets will be routed to each satellite operator via the internet. By using the 2.4 GHz spectrum, the inter-satellite communication will impose very limited RF noise on terrestrial communication, since 2.4 GHz communication has a significant loss in the atmosphere.
- The upload channel may stay “as is” (based on RF channels), as the upload communication is commonly (significantly) narrower than the download communication.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Curzi, G.; Modenini, D.; Tortora, P. Large constellations of small satellites: A survey of near future challenges and missions. Aerospace 2020, 7, 133. [Google Scholar] [CrossRef]
- Killinger, D. Free space optics for laser communication through the air. Opt. Photonics News 2002, 13, 36–42. [Google Scholar] [CrossRef]
- Henniger, H.; Wilfert, O. An Introduction to Free-space Optical Communications. Radioengineering 2010, 19, 203–212. [Google Scholar]
- Illi, E.; El Bouanani, F.; Ayoub, F. A performance study of a hybrid 5G RF/FSO transmission system. In Proceedings of the 2017 International Conference on Wireless Networks and Mobile Communications (WINCOM), Rabat, Morocco, 1–4 November 2017; pp. 1–7. [Google Scholar]
- Malik, A.; Singh, P. Free space optics: Current applications and future challenges. Int. J. Opt. 2015, 2015. [Google Scholar] [CrossRef] [Green Version]
- Marbel, R.; Ben-Moshe, B.; Grinshpoun, T. Urban Free-Space Optical Network Optimization. Appl. Sci. 2020, 10, 7872. [Google Scholar] [CrossRef]
- Nadeem, F.; Kvicera, V.; Awan, M.S.; Leitgeb, E.; Muhammad, S.; Kandus, G. Weather effects on hybrid FSO/RF communication link. IEEE J. Sel. Areas Commun. 2009, 27, 1687–1697. [Google Scholar] [CrossRef]
- Leitgeb, E.; Muhammad, S.S.; Chlestil, C.; Gebhart, M.; Birnbacher, U. Reliability of FSO links in next generation optical networks. In Proceedings of the 2005 7th International Conference Transparent Optical Networks, Catlonia, Spain, 3–7 July 2005; Volume 1, pp. 394–401. [Google Scholar]
- Rose, T.S.; Rowen, D.W.; LaLumondiere, S.; Werner, N.I.; Linares, R.; Faler, A.; Wicker, J.; Coffman, C.; Maul, G.; Chien, D.; et al. Optical communications downlink from a 1.5 U CubeSat: OCSD program. In Proceedings of the International Conference on Space Optics—ICSO 2018, Chania, Greece, 9–12 October 2018; Volume 11180, pp. 201–212. [Google Scholar]
- Israel, D.J.; Edwards, B.L.; Staren, J.W. Laser Communications Relay Demonstration (LCRD) update and the path towards optical relay operations. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–6. [Google Scholar]
- Kong, H.; Lin, M.; Zhu, W.P.; Amindavar, H.; Alouini, M.S. Multiuser scheduling for asymmetric FSO/RF links in satellite-UAV-terrestrial networks. IEEE Wirel. Commun. Lett. 2020, 9, 1235–1239. [Google Scholar] [CrossRef]
- Vu, M.Q.; Dang, N.T.; Pham, A.T. HAP-aided relaying satellite FSO/QKD systems for secure vehicular networks. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–6. [Google Scholar]
- Deng, P.; Kavehrad, M.; Lou, Y. MEMS-based beam steerable free space optical communication link for reconfigurable wireless data center. Proc. SPIE 2017, 10128, 33–41. [Google Scholar]
- Jeon, S.; Toshiyoshi, H. MEMS tracking mirror system for a bidirectional free-space optical link. Appl. Opt. 2017, 56, 6720–6727. [Google Scholar] [CrossRef]
- Cahoy, K.; Grenfell, P.; Crews, A.; Long, M.; Serra, P.; Nguyen, A.; Fitzgerald, R.; Haughwout, C.; Diez, R.; Aguilar, A.; et al. The CubeSat laser infrared crosslinK mission (CLICK). In Proceedings of the International Conference on Space Optics—ICSO 2018, Chania, Greece, 9–12 October 2018; SPIE: Bellingham, WA, USA, 2019; Volume 11180, p. 111800Y. [Google Scholar]
- Tanaka, T.; Kawamura, Y.; Tanaka, T. Development and operations of nano-satellite FITSAT-1 (NIWAKA). Acta Astronaut. 2015, 107, 112–129. [Google Scholar] [CrossRef]
- Riesing, K.M.; Schieler, C.M.; Brown, J.J.; Chang, J.S.; Gilbert, N.C.; Horvath, A.J.; Petrilli, L.J.; Reeve, R.S.; Robinson, B.S.; Scozzafava, J.J.; et al. Pointing, acquisition, and tracking for the TBIRD CubeSat mission: System design and pre-flight results. In Proceedings of the Free-Space Laser Communications XXXIV, San Francisco, CA, USA, 4 April 2022; SPIE: Bellingham, WA, USA, 2022; Volume 11993, pp. 207–216. [Google Scholar]
- Kashif, H.; Khan, M.N.; Altalbe, A. Hybrid optical-radio transmission system link quality: Link budget analysis. IEEE Access 2020, 8, 65983–65992. [Google Scholar] [CrossRef]
- Alipour, A.; Farmani, A.; Mir, A. Analysis of optical power budget in DWDM-FSO link under outdoor atmospheric channel model. Opt. Quantum Electron. 2021, 53, 446. [Google Scholar] [CrossRef]
- Carrasco-Casado, A.; Mata-Calvo, R. Space Optical Links for Communication Networks. In Springer Handbook of Optical Networks; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1057–1103. [Google Scholar]
- Planet-Labs. A Leader in Earth Observation. Available online: https://www.planet.com/ (accessed on 6 June 2021).
- Tzukran, M. Astrophotographer. Available online: https://www.michaelastro.com/ (accessed on 6 June 2021).
- Greene, M.; Zee, R. Increasing the accuracy of orbital position information from NORAD SGP4 using intermittent GPS readings. In Proceedings of the 23rd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 10–13 August 2009; Available online: https://www.michaelastro.com/shop (accessed on 6 May 2022).
- Stoll, E.; Letschnik, J.; Kebschull, C. II-3: Ground-based Satellite Tracking. Nanosatell. Space Ground Technol. Oper. Econ. 2020, 2020, 471–494. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 1986, 679–698. [Google Scholar] [CrossRef]
- Bradski, G. The OpenCV Library. Dr. Dobb’s J. Softw. Tools 2000. [Google Scholar]
- White, D.J.; Giannelos, I.; Zissimatos, A.; Kosmas, E.; Papadeas, D.; Papadeas, P.; Papamathaiou, M.; Roussos, N.; Tsiligiannis, V.; Charitopoulos, I. SatNOGS: Satellite Networked Open Ground Station. 2015. Available online: https://satnogs.org/ (accessed on 15 January 2022).
- Auger, F.; Hilairet, M.; Guerrero, J.M.; Monmasson, E.; Orlowska-Kowalska, T.; Katsura, S. Industrial applications of the Kalman filter: A review. IEEE Trans. Ind. Electron. 2013, 60, 5458–5471. [Google Scholar] [CrossRef] [Green Version]
- Shepherd, L.C.G.; Command, A.F.S. Space surveillance network. In Proceedings of the Shared Space Situational Awareness Conference, Colorado Springs, CO, USA, September 2006. [Google Scholar]
- Nakasuka, S.; Miyata, K.; Tsuruda, Y.; Aoyanagi, Y.; Matsumoto, T. Discussions on attitude determination and control system for micro/nano/pico-satellites considering survivability based on Hodoyoshi-3 and 4 experiences. Acta Astronaut. 2018, 145, 515–527. [Google Scholar] [CrossRef]
- Mathason, B.; Albert, M.M.; Engin, D.; Cao, H.; Petrillo, K.; Hwang, J.; Le, K.; Puffenberger, K.; Litvinovitch, S.; Utano, R.; et al. Advances in CubeSat Laser Communications Transceiver. In Proceedings of the Small Satellite Conference-Driving a Revolution, Utah State University, Logan, UT, USA, 3 August 2019; Available online: https://satnogs.org/ (accessed on 31 January 2022).
- Sansone, F.; Francesconi, A.; Corvaja, R.; Vallone, G.; Antonello, R.; Branz, F.; Villoresi, P. LaserCube optical communication terminal for nano and micro satellites. Acta Astronaut. 2020, 173, 310–319. [Google Scholar] [CrossRef]
- Johnston-Lemke, B.; Sarda, K.; Grant, C.; Zee, R. Arc-minute attitude stability on a nanosatellite: Enabling stellar photometry on the smallest scale. In Proceedings of the 25th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 8–11 August 2011; Available online: https://digitalcommons.usu.edu/smallsat/2011/all2011/71/ (accessed on 31 January 2022).
- Graham, R.L.; Lawler, E.L.; Lenstra, J.K.; Rinnooy Kan, A. Optimization and approximation in deterministic sequencing and scheduling: A survey. Ann. Discret. Math. v5 1977, 5, 287–326. [Google Scholar]
- Lenstra, J.K.; Kan, A.R.; Brucker, P. Complexity of machine scheduling problems. Ann. Discret. Math. 1977, 1, 343–362. [Google Scholar]
- Péridy, L.; Pinson, E.; Rivreau, D. Using short-term memory to minimize the weighted number of late jobs on a single machine. Eur. J. Oper. Res. 2003, 148, 591–603. [Google Scholar] [CrossRef]
- Sadykov, R. A branch-and-check algorithm for minimizing the weighted number of late jobs on a single machine with release dates. Eur. J. Oper. Res. 2008, 189, 1284–1304. [Google Scholar] [CrossRef]
- Sevaux, M.; Dauzère-Pérès, S. Genetic algorithms to minimize the weighted number of late jobs on a single machine. Eur. J. Oper. Res. 2003, 151, 296–306. [Google Scholar] [CrossRef]
- Sevaux, M.; Sörensen, K. A genetic algorithm for robust schedules in a one-machine environment with ready times and due dates. Q. J. Belg. Fr. Ital. Oper. Res. Soc. 2004, 2, 129–147. [Google Scholar] [CrossRef]
- Clements, E.; Aniceto, R.; Barnes, D.; Caplan, D.; Clark, J.; del Portillo, I.; Haughwout, C.; Khatsenko, M.; Kingsbury, R.; Lee, M.; et al. Nanosatellite optical downlink experiment: Design, simulation, and prototyping. Opt. Eng. 2016, 55, 111610. [Google Scholar] [CrossRef]
- Morgan, R.E.; Douglas, E.S.; Allan, G.; do Vale Pereira, P.; Gubner, J.N.; Haughwout, C.; Murphy, T.; Merk, J.; Egan, M.D.; Furész, G.; et al. Optical calibration and first light for the deformable mirror demonstration mission CubeSat (DeMi). J. Astron. Telesc. Instruments Syst. 2021, 7, 024002. [Google Scholar] [CrossRef]
- Chen, W.; Sun, J.; Hou, X.; Zhu, R.; Hou, P.; Yang, Y.; Gao, M.; Lei, L.; Xie, K.; Huang, M.; et al. 5.12 Gbps optical communication link between LEO satellite and ground station. In Proceedings of the 2017 IEEE International Conference on Space Optical Systems and Applications (ICSOS), Naha, Japan, 14–16 November 2017; pp. 260–263. [Google Scholar]
- Zhu, X.; Kahn, J.M. Free-space optical communication through atmospheric turbulence channels. IEEE Trans. Commun. 2002, 50, 1293–1300. [Google Scholar]
- Rapaport, L.; Yozevitch, R.; Ben-Moshe, B. Ad hoc FSO communication. In Proceedings of the 2017 IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems (COMCAS), Tel Aviv, Israel, 13–15 November 2017; pp. 1–5. [Google Scholar]
- The Open Source Global Satellite Network. Available online: https://tinygs.com/ (accessed on 31 January 2022).
- Marbel, R.; Yozevitch, R.; Grinshpoun, T.; Ben-Moshe, B. Dynamic Network Formation for FSO Satellite Communication. Appl. Sci. 2022, 12, 738. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Foust, R.; Subramanian, G.P.; Chung, S.J.; Hadaegh, F.Y. Review of formation flying and constellation missions using nanosatellites. J. Spacecr. Rocket. 2016, 53, 567–578. [Google Scholar] [CrossRef] [Green Version]
- Xie, H.; Zhan, Y.; Zeng, G.; Pan, X. LEO mega-constellations for 6G global coverage: Challenges and opportunities. IEEE Access 2021, 9, 164223–164244. [Google Scholar] [CrossRef]
- Qu, Z.; Zhang, G.; Cao, H.; Xie, J. LEO satellite constellation for Internet of Things. IEEE Access 2017, 5, 18391–18401. [Google Scholar] [CrossRef]
- Li, L.; Xuejiao, Z.; Jianhua, Z.; Changzhi, X.; Yi, J. Advanced space laser communication technology on cubesats. ZTE Commun. 2021, 18, 45–54. [Google Scholar]
- Kaushal, H.; Kaddoum, G. Optical communication in space: Challenges and mitigation techniques. IEEE Commun. Surv. Tutorials 2016, 19, 57–96. [Google Scholar] [CrossRef] [Green Version]
- Gutiérrez, S.T.; Fuentes, C.I.; Díaz, M.A. Introducing sost: An ultra-low-cost star tracker concept based on a raspberry pi and open-source astronomy software. IEEE Access 2020, 8, 166320–166334. [Google Scholar] [CrossRef]
- SATLLA Project: Pico Satellites with Laser-Com Capabilities. Available online: https://www.ariel-asc.com/blog (accessed on 31 January 2022).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nano-Satellite Communication: RF vs. Laser | ||||||
|---|---|---|---|---|---|---|
| Category | UHF | S-Band | X-Band | Ka | 1550 nm | 1064 nm |
| Bit rate (Mbps) | 0.01 | 0.5 | 5 | 20 | 1000 | 50 |
| Free to use | no | no | no | no | yes | yes |
| Suitable for 1 U | yes | yes | so so | so so | yes | yes |
| Tx beam (deg) | 90 | 30 | 10 | 3 | 0.1 | 0.05 |
| All weather | yes | so so | yes | so so | so so | no |
| Project Example | Norby | GOMX3 | GOMX3 | NSLSAT | CLICK * | AC 7-B |
| Parameter | Units | Value | Remarks |
|---|---|---|---|
| Wavelength | nm | 850 | can be 532, 1550 |
| Link Distance | km | 1000 | |
| Tx Divergence | mrad | 1 | |
| Elevation Angle | degree | 45 | |
| Transmit Power () | dBm | 20 | |
| Receiver Sensitivity () | dBm | −65 | APD |
| Receiver Area () | m | 0.1 | 14 telescope |
| System Loss () | dB | 3 | |
| Geometrical Loss | dB | 70 | |
| Atmospheric Loss () | dB | <3 | clear night sky |
| Turbulence Loss () | dB | <1 | clear night sky |
| Total Budget | dB | 85 | |
| Total Loss | dB | <77 | |
| Link Margin | dB | >8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marbel, R.; Ben-Moshe, B.; Grinshpoun, T. Pico-Sat to Ground Control: Optimizing Download Link via Laser Communication. Remote Sens. 2022, 14, 3514. https://doi.org/10.3390/rs14153514
Marbel R, Ben-Moshe B, Grinshpoun T. Pico-Sat to Ground Control: Optimizing Download Link via Laser Communication. Remote Sensing. 2022; 14(15):3514. https://doi.org/10.3390/rs14153514
Chicago/Turabian StyleMarbel, Revital, Boaz Ben-Moshe, and Tal Grinshpoun. 2022. "Pico-Sat to Ground Control: Optimizing Download Link via Laser Communication" Remote Sensing 14, no. 15: 3514. https://doi.org/10.3390/rs14153514
APA StyleMarbel, R., Ben-Moshe, B., & Grinshpoun, T. (2022). Pico-Sat to Ground Control: Optimizing Download Link via Laser Communication. Remote Sensing, 14(15), 3514. https://doi.org/10.3390/rs14153514