
What You See Is What You Breathe? Estimating Air Pollution Spatial Variation Using Street-Level Imagery

 , ,
, ,  , , ,
, , ,  ,
,  ,
,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Land Use Regression and Dispersion Model Outputs
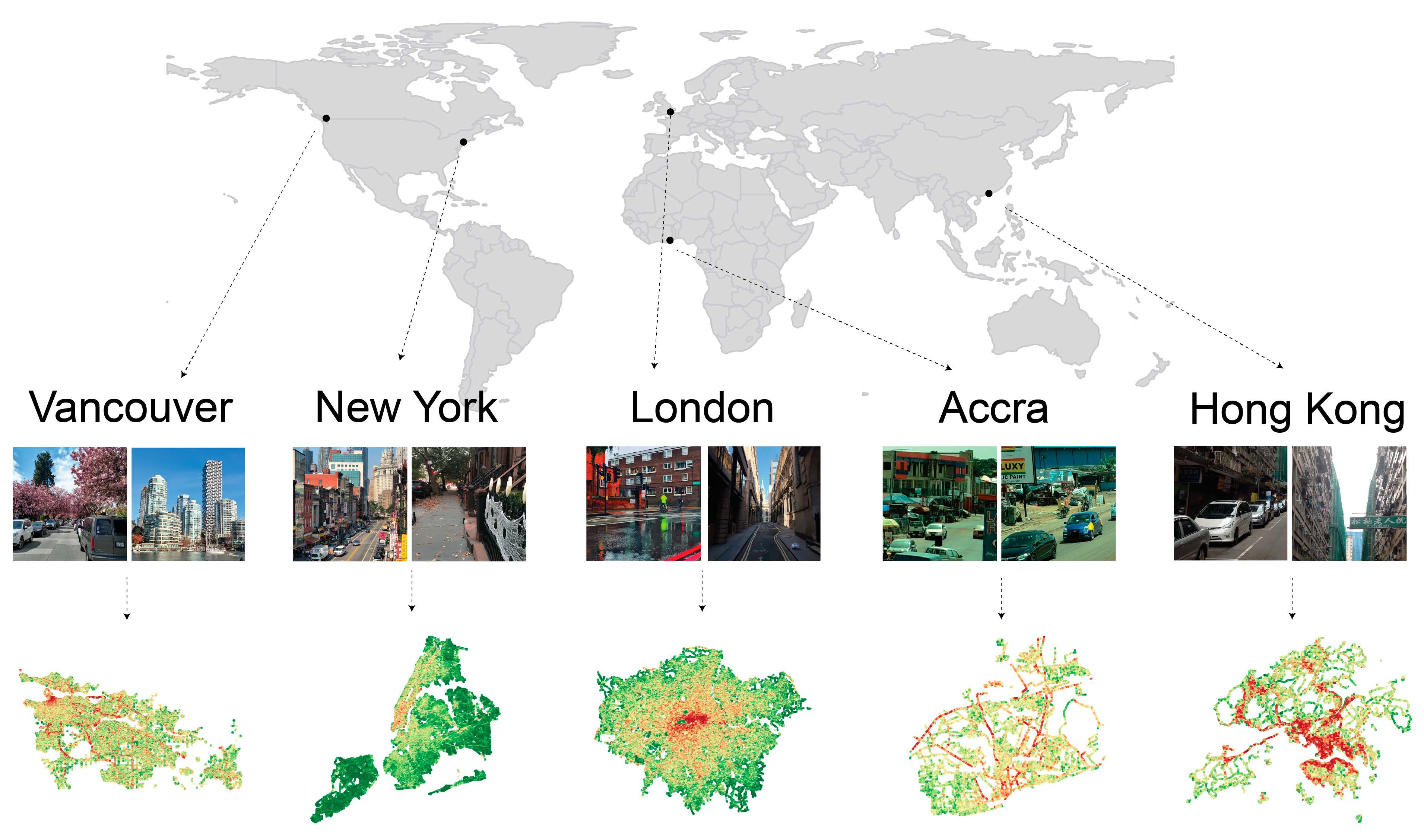
2.2. Street-Level Images
2.3. Ground Monitoring Stations
2.4. Modelling Approach
3. Results and Discussion
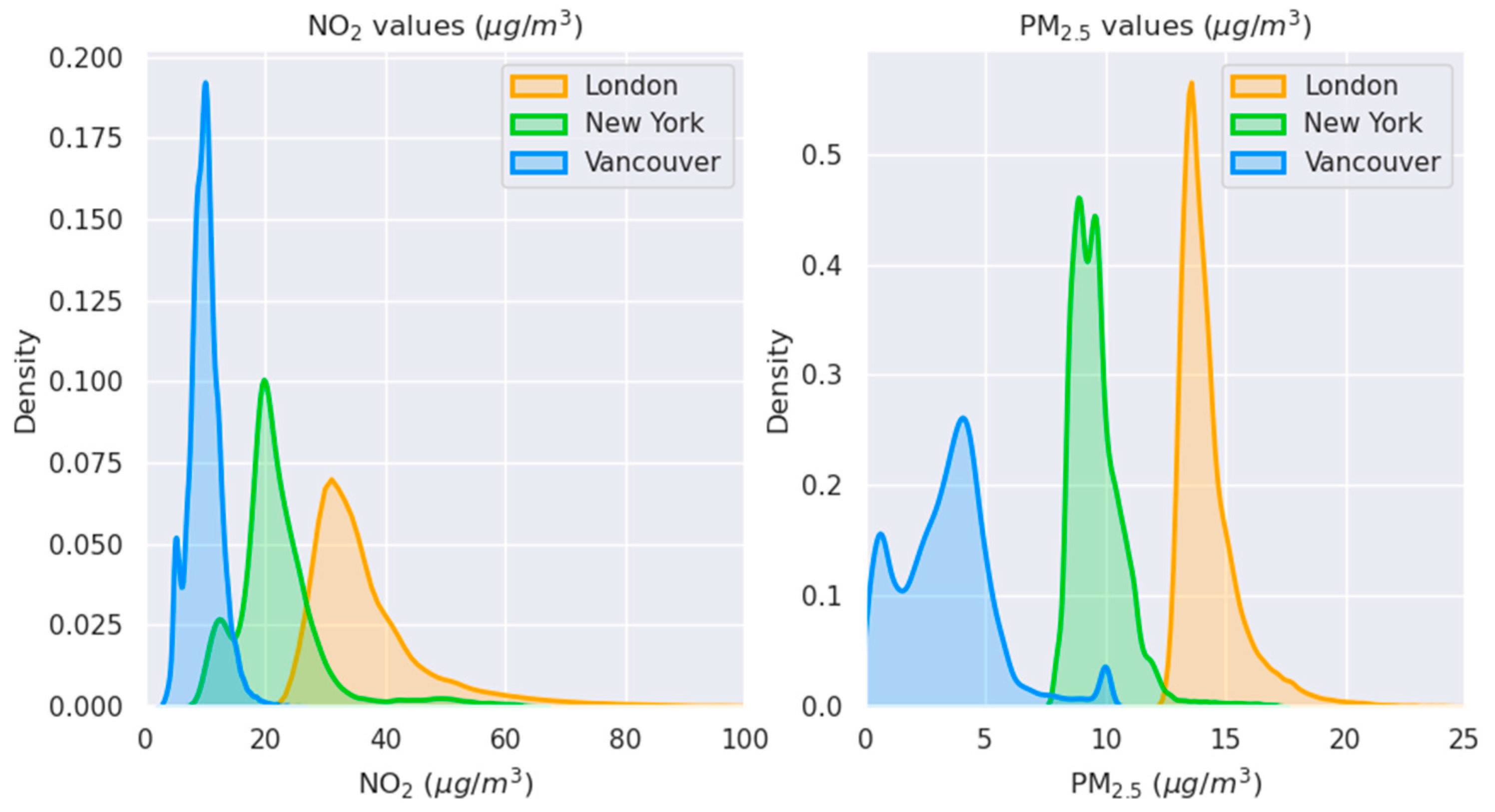
3.1. Intracity Performance for London, Vancouver, and New York
3.2. Intracity Performance for London, Vancouver, and New York
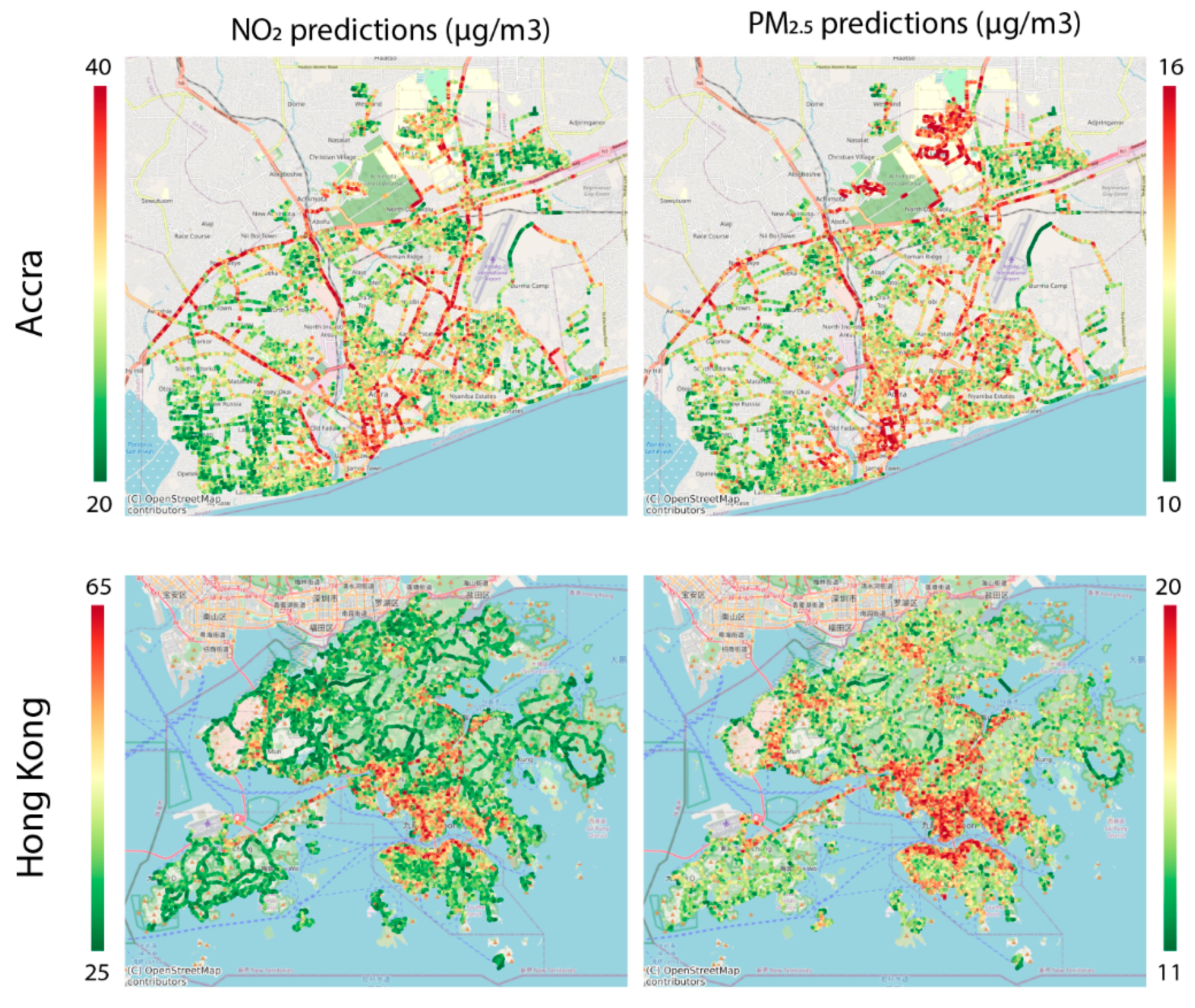
3.3. Evaluation of Transferability to Accra and Hong Kong
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Landrigan, P.J.; Fuller, R.; Acosta, N.J.R.; Adeyi, O.; Arnold, R.; Basu, N.; Baldé, A.B.; Bertollini, R.; Bose-O’Reilly, S.; Boufford, J.I.; et al. The Lancet Commission on pollution and health. Lancet 2018, 391, 462–512. [Google Scholar] [CrossRef] [Green Version]
- Cohen, A.J.; Brauer, M.; Burnett, R.; Anderson, H.R.; Frostad, J.; Estep, K.; Balakrishnan, K.; Brunekreef, B.; Dandona, L.; Dandona, R.; et al. Estimates and 25-year trends of the global burden of disease attributable to ambient air pollution: An analysis of data from the Global Burden of Diseases Study 2015. Lancet 2017, 389, 1907–1918. [Google Scholar] [CrossRef] [Green Version]
- Hoek, G.; Krishnan, R.M.; Beelen, R.; Peters, A.; Ostro, B.; Brunekreef, B.; Kaufman, J.D. Long-term air pollution exposure and cardio-respiratory mortality: A review. Environ. Health 2013, 12, 43. [Google Scholar] [CrossRef] [Green Version]
- Schraufnagel, D.E.; Balmes, J.R.; Cowl, C.T.; De Matteis, S.; Jung, S.-H.; Mortimer, K.; Perez-Padilla, R.; Rice, M.B.; Riojas-Rodriguez, H.; Sood, A.; et al. Air Pollution and Noncommunicable Diseases: A Review by the Forum of International Respiratory Societies’ Environmental Committee, Part 1: The Damaging Effects of Air Pollution. Chest 2019, 155, 409–416. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brauer, M.; Amann, M.; Burnett, R.T.; Cohen, A.; Dentener, F.; Ezzati, M.; Henderson, S.B.; Krzyzanowski, M.; Martin, R.V.; Van Dingenen, R.; et al. Exposure assessment for estimation of the global burden of disease attributable to outdoor air pollution. Environ. Sci. Technol. 2012, 46, 652–660. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ryan, P.H.; Lemasters, G.K. A review of land-use regression models for characterizing intraurban air pollution exposure. Inhal. Toxicol. 2007, 19 (Suppl. 1), 127–133. [Google Scholar] [CrossRef] [Green Version]
- Martin, R.V.; Brauer, M.; van Donkelaar, A.; Shaddick, G.; Narain, U.; Dey, S. No one knows which city has the highest concentration of fine particulate matter. Atmos. Environ. 2019, 3, 100040. [Google Scholar] [CrossRef]
- Weichenthal, S.; Hatzopoulou, M.; Brauer, M. A picture tells a thousand… exposures: Opportunities and challenges of deep learning image analyses in exposure science and environmental epidemiology. Environ. Int. 2019, 122, 3–10. [Google Scholar] [CrossRef]
- Apte, J.S.; Messier, K.P.; Gani, S.; Brauer, M.; Kirchstetter, T.W.; Lunden, M.M.; Marshall, J.D.; Portier, C.; Vermeulen, R.C.; Hamburg, S.P. High-Resolution Air Pollution Mapping with Google Street View Cars: Exploiting Big Data. Environ. Sci. Technol. 2017, 51, 6999–7008. [Google Scholar] [CrossRef]
- Messier, K.P.; Chambliss, S.E.; Gani, S.; Alvarez, R.; Brauer, M.; Choi, J.J.; Hamburg, S.P.; Kerckhoffs, J.; LaFranchi, B.; Lunden, M.M.; et al. Mapping air pollution with google street view cars: Efficient Approaches with mobile monitoring and land use regression. Environ. Sci. Technol. 2018, 52, 12563–12572. [Google Scholar] [CrossRef] [Green Version]
- Hong, K.; Weichenthal, S. A New Method of Estimating Global PM2. 5 Concentrations using Satellite Images. Environ. Epidemiol. 2019, 3, 432. [Google Scholar]
- Ganji, A.; Minet, L.; Weichenthal, S.; Hatzopoulou, M. Predicting Traffic-Related Air Pollution Using Feature Extraction from Built Environment Images. Environ. Sci. Technol. 2020, 54, 10688–10699. [Google Scholar] [CrossRef] [PubMed]
- Hong, K.Y.; Pinheiro, P.O.; Weichenthal, S. Predicting outdoor ultrafine particle number concentrations, particle size, and noise using street-level images and audio data. Environ. Int. 2020, 144, 106044. [Google Scholar] [CrossRef] [PubMed]
- Sorek-Hamer, M.; Just, A.C.; Kloog, I. The Use of Satellite Remote Sensing in Epidemiological Studies. Curr. Opin. Pediatr. 2016, 28, 228. [Google Scholar] [CrossRef] [Green Version]
- Suel, E.; Polak, J.W.; Bennett, J.E.; Ezzati, M. Measuring social, environmental and health inequalities using deep learning and street imagery. Sci. Rep. 2019, 9, 1–10. [Google Scholar] [CrossRef]
- Qi, M.; Hankey, S. Using Street View Imagery to Predict Street-Level Particulate Air Pollution. Environ. Sci. Technol. 2021, 55, 2695–2704. [Google Scholar] [CrossRef]
- Hoek, G.; Beelen, R.; de Hoogh, K.; Vienneau, D.; Gulliver, J.; Fischer, P.; Briggs, D. A review of land-use regression models to assess spatial variation of outdoor air pollution. Atmos. Environ. 2008, 42, 7561–7578. [Google Scholar] [CrossRef]
- Clark, S.N.; Alli, A.S.; Brauer, M.; Ezzati, M.; Baumgartner, J.; Toledano, M.B.; Hughes, A.F.; Nimo, J.; Moses, J.B.; Terkpertey, S.; et al. High-resolution spatiotemporal measurement of air and environmental noise pollution in Sub-Saharan African cities: Pathways to Equitable Health Cities Study protocol for Accra, Ghana. BMJ Open 2020, 10, 35798. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Suel, E.; Bhatt, S.; Brauer, M.; Flaxman, S.; Ezzati, M. Multimodal deep learning from satellite and street-level imagery for measuring income, overcrowding, and environmental deprivation in urban areas. Remote Sens. Environ. 2021, 257, 112339. [Google Scholar] [CrossRef]
- de Hoogh, K.; Gulliver, J.; van Donkelaar, A.; Martin, R.V.; Marshall, J.D.; Bechle, M.J.; Cesaroni, G.; Pradas, M.C.; Dedele, A.; Eeftens, M.; et al. Development of West-European PM2. 5 and NO2 land use regression models incorporating satellite-derived and chemical transport modelling data. Environ. Res. 2016, 151, 1–10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Beelen, R.; Hoek, G.; Vienneau, D.; Eeftens, M.; Dimakopoulou, K.; Pedeli, X.; Tsai, M.-Y.; Künzli, N.; Schikowski, T.; Marcon, A.; et al. Development of NO2 and NOx land use regression models for estimating air pollution exposure in 36 study areas in Europe—The ESCAPE project. Atmos. Environ. 2013, 72, 10–23. [Google Scholar] [CrossRef]
- City of New York. The New York City Community Air Survey: Neighborhood Air Quality 2008–2014. 2017. Available online: https://www1.nyc.gov/site/doh/data/data-sets/air-quality-nyc-community-air-survey.page (accessed on 14 July 2022).
- Henderson, S.B.; Beckerman, B.; Jerrett, M.; Brauer, M. Application of land use regression to estimate long-term concentrations of traffic-related nitrogen oxides and fine particulate matter. Environ. Sci. Technol. 2007, 41, 2422–2428. [Google Scholar] [CrossRef] [PubMed]
- Bechle, M.J.; Millet, D.B.; Marshall, J.D. National spatiotemporal exposure surface for NO2: Monthly scaling of a satellite-derived land-use regression, 2000—2010. Environ. Sci. Technol. 2015, 49, 12297–12305. [Google Scholar] [CrossRef]
- Smith, R.B.; Fecht, D.; Gulliver, J.; Beevers, S.D.; Dajnak, D.; Blangiardo, M.; Ghosh, R.E.; Hansell, A.L.; Kelly, F.J.; Anderson, H.R.; et al. Impact of London’s road traffic air and noise pollution on birth weight: Retrospective population based cohort study. BMJ 2017, 359, 5299. [Google Scholar] [CrossRef] [Green Version]
- Clean Air for London. London Atmospheric Emissions Inventory (LAEI) 2010. 2010. Available online: https://data.london.gov.uk/dataset/london-atmospheric-emissions-inventory-2010 (accessed on 14 July 2022).
- Wang, R.; Henderson, S.B.; Sbihi, H.; Allen, R.W.; Brauer, M. Temporal stability of land use regression models for traffic-related air pollution. Atmos. Environ. 2013, 64, 312–319. [Google Scholar] [CrossRef]
- U.S. EPA. US EPA Air Quality Download Data. 2020. Available online: https://aqs.epa.gov/aqsweb/airdata/download_files.html (accessed on 14 July 2022).
- Government of Canada. Environment and Climate Change Canada Data. 2020. Available online: http://data.ec.gc.ca/data/?lang=en (accessed on 14 July 2022).
- Imperial College. London Air Quality Network. 2020. Available online: https://www.londonair.org.uk/london/asp/reportdetail.asp?ReportID=lars2010 (accessed on 14 July 2022).
- Lang, P.E.; Carslaw, D.C.; Moller, S.J. A trend analysis approach for air quality network data. Atmos. Environ. 2019, 2, 100030. [Google Scholar] [CrossRef]
- Lee, M.; Brauer, M.; Wong, P.; Tang, R.; Tsui, T.H.; Choi, C.; Cheng, W.; Lai, P.-C.; Tian, L.; Thach, T.-Q.; et al. Land use regression modelling of air pollution in high density high rise cities: A case study in Hong Kong. Sci. Total Environ. 2017, 592, 306–315. [Google Scholar] [CrossRef] [Green Version]
- Alli, A.S.; Clark, S.N.; Hughes, A.F.; Nimo, J.; Bedford-Moses, J.; Baah, S.; Wang, J.; Vallarino, J.; Agyemang, E.; Barratt, B.; et al. Spatial-temporal patterns of ambient fine particulate matter (PM2.5) and black carbon (BC) pollution in Accra. Environ. Res. Lett. 2021, 16, 074013. [Google Scholar] [CrossRef]
- Wang, J.; Alli, A.S.; Clark, S.; Hughes, A.; Ezzati, M.; Beddows, A.; Vallarino, J.; Nimo, J.; Bedford-Moses, J.; Baah, S.; et al. Nitrogen oxides (NO and NO2) pollution in the Accra metropolis: Spatiotemporal patterns and the role of meteorology. Sci. Total Environ. 2022, 803, 149931. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Zhou, B.; Khosla, A.; Lapedriza, A.; Oliva, A.; Torralba, A. Learning Deep Features for Discriminative Localization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016. pp. 2921–2929. [CrossRef] [Green Version]
- Torch Contributors. Torchvision Models. 2017. Available online: https://pytorch.org/vision/stable/models.html (accessed on 13 July 2022).
- Briggs, D.J.; de Hoogh, C.; Gulliver, J.; Wills, J.; Elliott, P.; Kingham, S.; Smallbone, K. A regression-based method for mapping traffic-related air pollution: Application and testing in four contrasting urban environments. Sci. Total Environ. 2000, 253, 151–167. [Google Scholar] [CrossRef]
- Jerrett, M.; Arain, A.; Kanaroglou, P.; Beckerman, B.; Potoglou, D.; Sahsuvaroglu, T.; Morrison, J.; Giovis, C. A review and evaluation of intraurban air pollution exposure models. J. Expo. Anal. Environ. Epidemiol. 2005, 15, 185–204. [Google Scholar] [CrossRef] [PubMed]
- Poplawski, K.; Gould, T.; Setton, E.; Allen, R.; Su, J.; Larson, T.; Henderson, S.; Brauer, M.; Hystad, P.; Lightowlers, C.; et al. Intercity transferability of land use regression models for estimating ambient concentrations of nitrogen dioxide. J. Expo. Sci. Environ. Epidemiol. 2009, 19, 107–117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Simonyan, K.; Vedaldi, A.; Zisserman, A. Deep Inside Convolutional Networks: Visualising Image Classification Models and Saliency Maps. 2013. Available online: http://arxiv.org/abs/1312.6034 (accessed on 14 October 2017).
- McDuffie, E.E.; Martin, R.V.; Spadaro, J.V.; Burnett, R.; Smith, S.J.; O’Rourke, P.; Hammer, M.S.; van Donkelaar, A.; Bindle, L.; Shah, V.; et al. Source sector and fuel contributions to ambient PM2.5 and attributable mortality across multiple spatial scales. Nat. Commun. 2021, 12, 1–12. [Google Scholar] [CrossRef]
- Dionisio, K.; Arku, R.; Hughes, A.; Vallarino, J. Air Pollution in Accra Neighborhoods: Spatial, Socioeconomic, and Temporal Patterns. Environ. Sci. Technol. 2010, 44, 2270–2276. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| City-Wide LUR Based Estimates of Air Pollution | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| London | New York | Vancouver | ||||||||||||||
| r | RMSE | NRMSE | R2 | ME | r | RMSE | NRMSE | R2 | ME | r | RMSE | NRMSE | R2 | ME | ||
| NO2 | N = 94,714 | N = 49,575 | N = 60,562 | |||||||||||||
| Intracity | 0.79 | 7.31 | 0.20 | 0.62 | −0.19 | 0.87 | 3.83 | 0.18 | 0.75 | 0.34 | 0.73 | 1.81 | 0.19 | 0.52 | 0.11 | |
| Intercity | 0.42 | 21.38 | 0.58 | 0.18 | 18.80 | 0.60 | 12.83 | 0.59 | 0.36 | −8.66 | 0.28 | 17.57 | 1.81 | 0.08 | −16.69 | |
| Adj. intercity | 12.07 | 0.32 | 0.00 | 6.89 | 0.31 | 0.00 | 3.12 | 0.32 | 0.00 | |||||||
| PM2.5 | ||||||||||||||||
| Intracity | 0.79 | 0.88 | 0.06 | 0.59 | 0.04 | 0.85 | 0.61 | 0.06 | 0.71 | 0.069 | 0.60 | 1.63 | 0.49 | 0.33 | 0.14 | |
| Intercity | 0.37 | 5.77 | 0.40 | 0.14 | 5.52 | 0.47 | 4.06 | 0.42 | 0.22 | −2.21 | 0.06 | 9.10 | 2.73 | 0.00 | −8.80 | |
| Adj. intercity | 1.55 | 0.11 | 0.00 | 1.17 | 0.12 | 0.00 | 2.75 | 0.82 | 0.00 | |||||||
| Ground Monitoring Stations | ||||||||||||||||
| London | New York | Vancouver | ||||||||||||||
| r | RMSE | NRMSE | R2 | ME | r | RMSE | NRMSE | R2 | ME | r | RMSE | NRMSE | R2 | ME | ||
| NO2 | N = 8 | N = 47 | N = 4 | |||||||||||||
| Intracity | 0.90 | 17.71 | 0.27 | 0.81 | 13.47 | 0.76 | 27.97 | 0.49 | 0.58 | 26.29 | 0.97 | 2.63 | 0.24 | 0.95 | 1.65 | |
| Intercity | 0.82 | 46.22 | 0.71 | 0.67 | 41.91 | 0.51 | 22.30 | 0.39 | 0.26 | 17.90 | 0.51 | 13.70 | 1.23 | 0.00 | −12.14 | |
| Adj. intercity | 13.52 | 0.21 | 0.00 | 14.38 | 0.25 | 0.00 | 4.81 | 0.43 | 0.00 | |||||||
| PM2.5 | N = 9 | N = 4 | N = 2 | |||||||||||||
| Intracity | 0.72 | 2.19 | 0.13 | 0.51 | −0.34 | 0.86 | 1.15 | 0.10 | 0.74 | 1.56 | - | 1.04 | 0.25 | - | 0.70 | |
| Intercity | 0.46 | 8.03 | 0.48 | 0.22 | 7.54 | 0.29 | 5.26 | 0.47 | 0.09 | −4.41 | - | 8.81 | 2.15 | - | −8.7 | |
| Adj. intercity | 2.72 | 0.16 | 0.00 | 0.65 | 0.06 | 0.00 | 0.78 | 0.19 | 0.00 | |||||||
| Hong Kong | Accra | |||||||||||||||
| r | RMSE | NRMSE | R2 | ME | r | RMSE | NRMSE | R2 | ME | |||||||
| NO2 | N = 97 | N = 35 | ||||||||||||||
| Intercity | 0.46 | 63.30 | 0.58 | 0.21 | 51.63 | 0.25 | 38.55 | 0.63 | 0.06 | 30.19 | ||||||
| Adj. intercity | 42.42 | 0.39 | 0.00 | 28.65 | 0.47 | 0.00 | ||||||||||
| PM2.5 | N = 52 | N = 32 | ||||||||||||||
| Intercity | 0.02 | 8.35 | 0.36 | 0.00 | 3.90 | −0.12 | 13.02 | 0.61 | 0.01 | 8.09 | ||||||
| Adj. intercity | 9.76 | 0.42 | 0.00 | 11.91 | 0.56 | 0.00 | ||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suel, E.; Sorek-Hamer, M.; Moise, I.; von Pohle, M.; Sahasrabhojanee, A.; Asanjan, A.A.; Arku, R.E.; Alli, A.S.; Barratt, B.; Clark, S.N.; et al. What You See Is What You Breathe? Estimating Air Pollution Spatial Variation Using Street-Level Imagery. Remote Sens. 2022, 14, 3429. https://doi.org/10.3390/rs14143429
Suel E, Sorek-Hamer M, Moise I, von Pohle M, Sahasrabhojanee A, Asanjan AA, Arku RE, Alli AS, Barratt B, Clark SN, et al. What You See Is What You Breathe? Estimating Air Pollution Spatial Variation Using Street-Level Imagery. Remote Sensing. 2022; 14(14):3429. https://doi.org/10.3390/rs14143429
Chicago/Turabian StyleSuel, Esra, Meytar Sorek-Hamer, Izabela Moise, Michael von Pohle, Adwait Sahasrabhojanee, Ata Akbari Asanjan, Raphael E. Arku, Abosede S. Alli, Benjamin Barratt, Sierra N. Clark, and et al. 2022. "What You See Is What You Breathe? Estimating Air Pollution Spatial Variation Using Street-Level Imagery" Remote Sensing 14, no. 14: 3429. https://doi.org/10.3390/rs14143429
APA StyleSuel, E., Sorek-Hamer, M., Moise, I., von Pohle, M., Sahasrabhojanee, A., Asanjan, A. A., Arku, R. E., Alli, A. S., Barratt, B., Clark, S. N., Middel, A., Deardorff, E., Lingenfelter, V., Oza, N. C., Yadav, N., Ezzati, M., & Brauer, M. (2022). What You See Is What You Breathe? Estimating Air Pollution Spatial Variation Using Street-Level Imagery. Remote Sensing, 14(14), 3429. https://doi.org/10.3390/rs14143429