
Unmanned Aircraft System (UAS) Structure-From-Motion (SfM) for Monitoring the Changed Flow Paths and Wetness in Minerotrophic Peatland Restoration

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
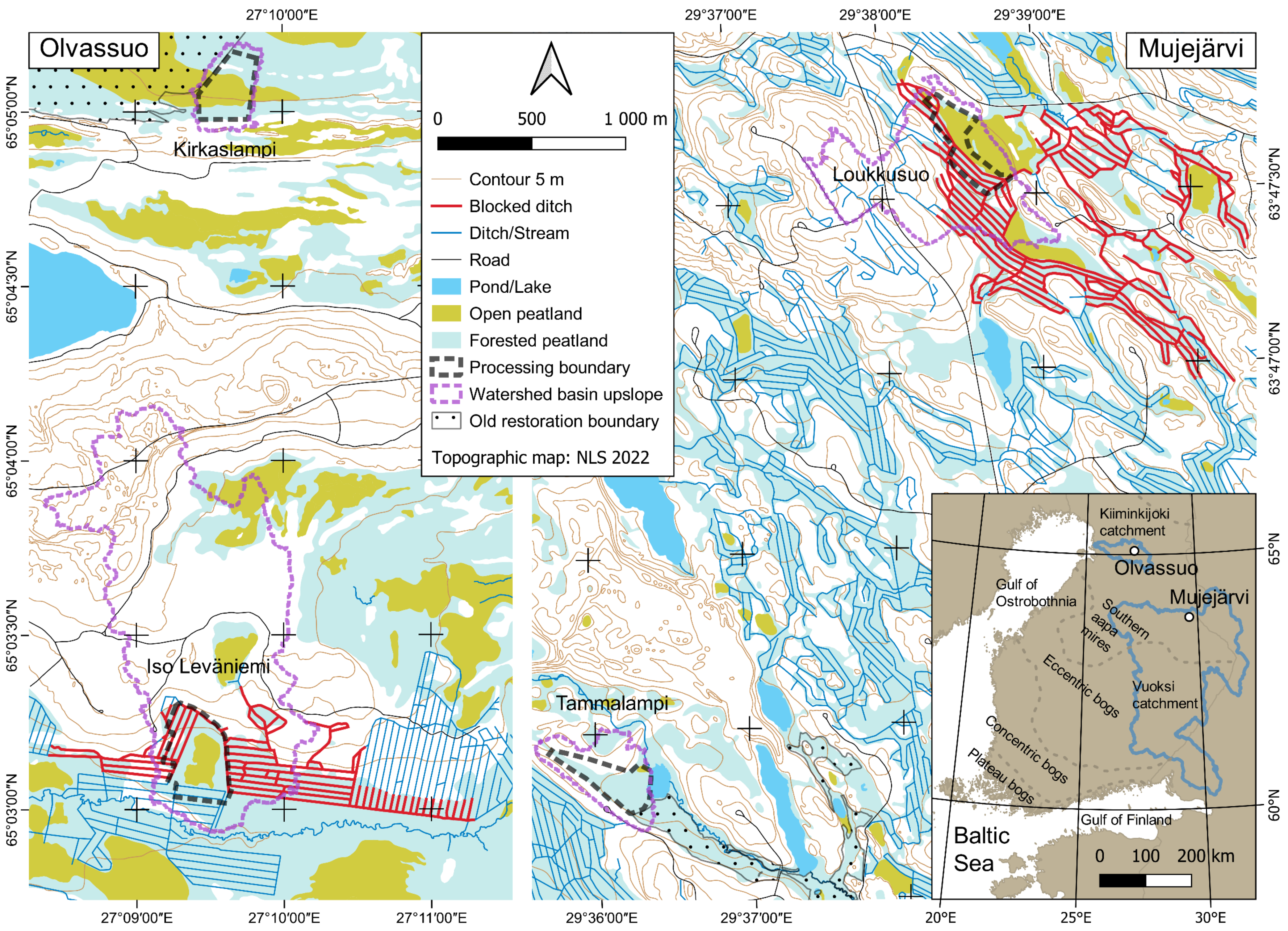
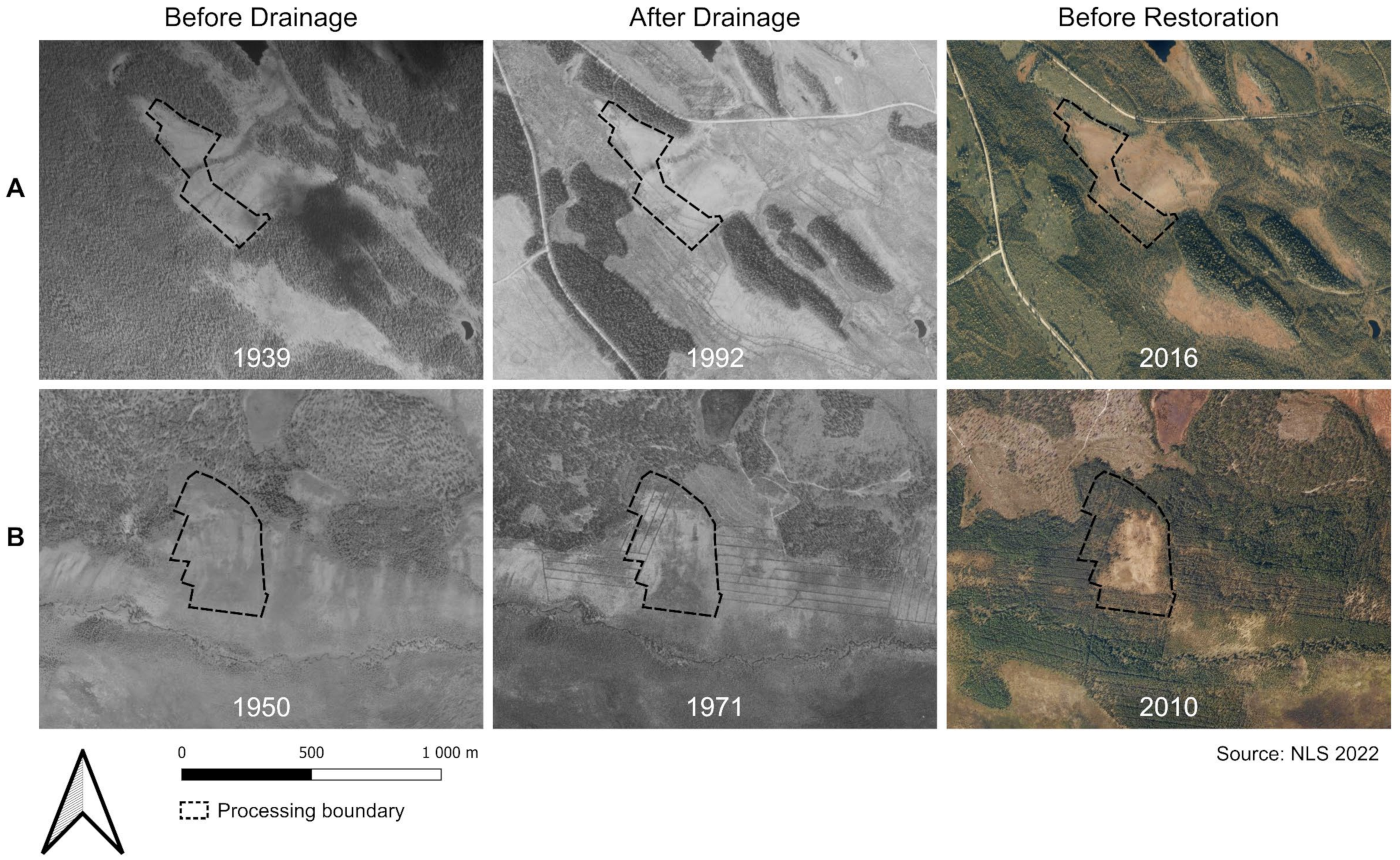
2.1. Study Sites
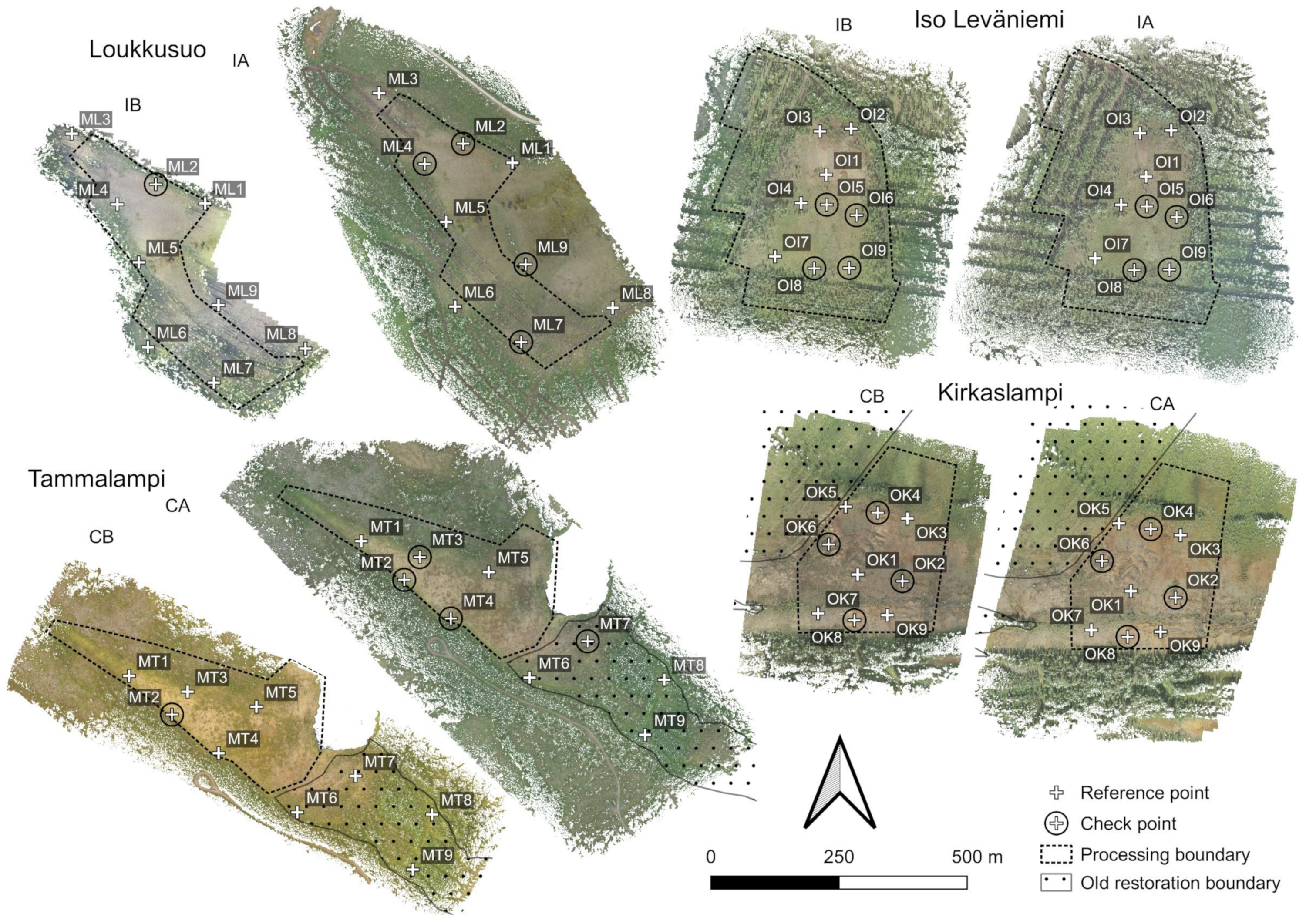
2.2. UAS Mapping
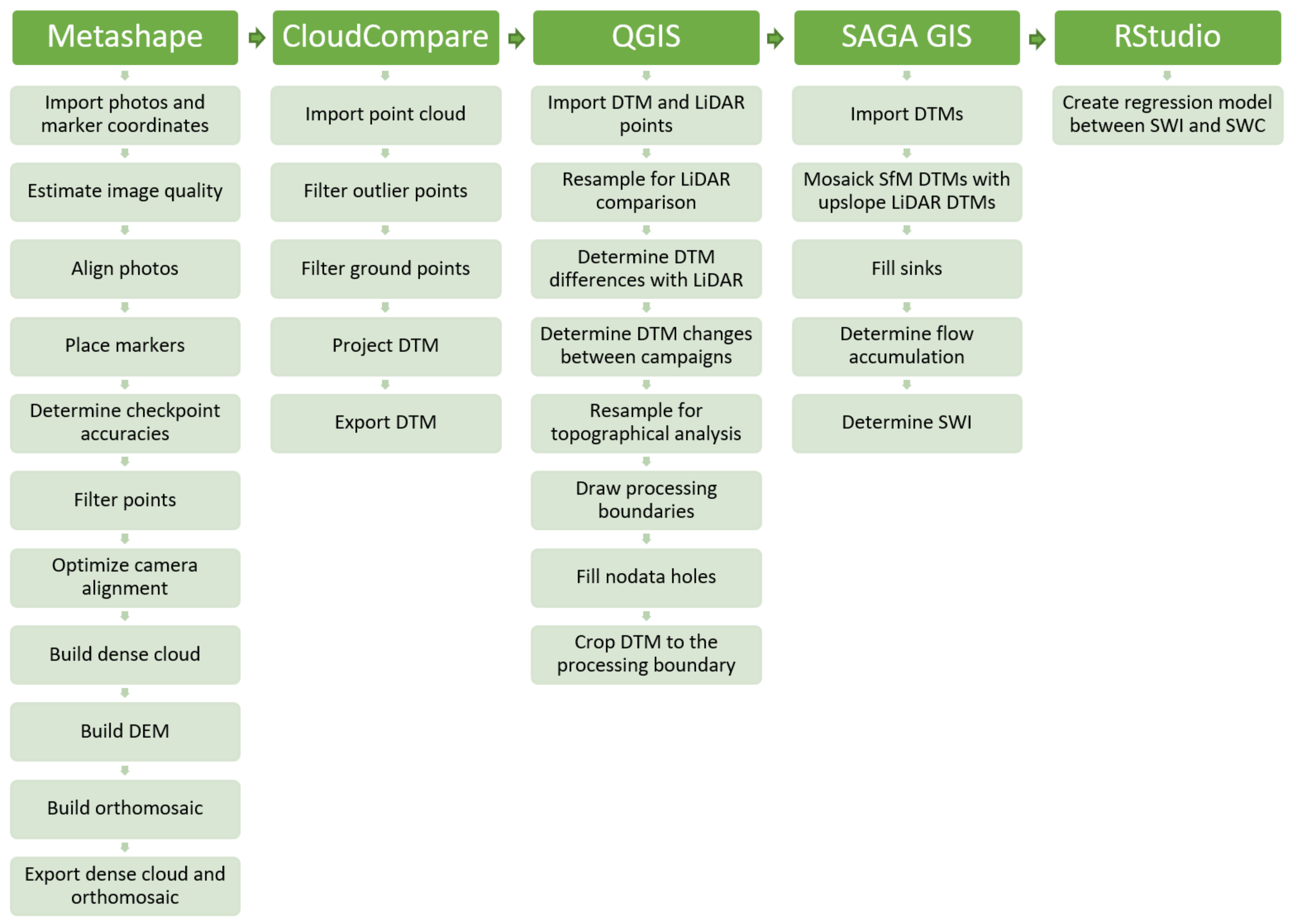
2.3. UAS Data Stitching
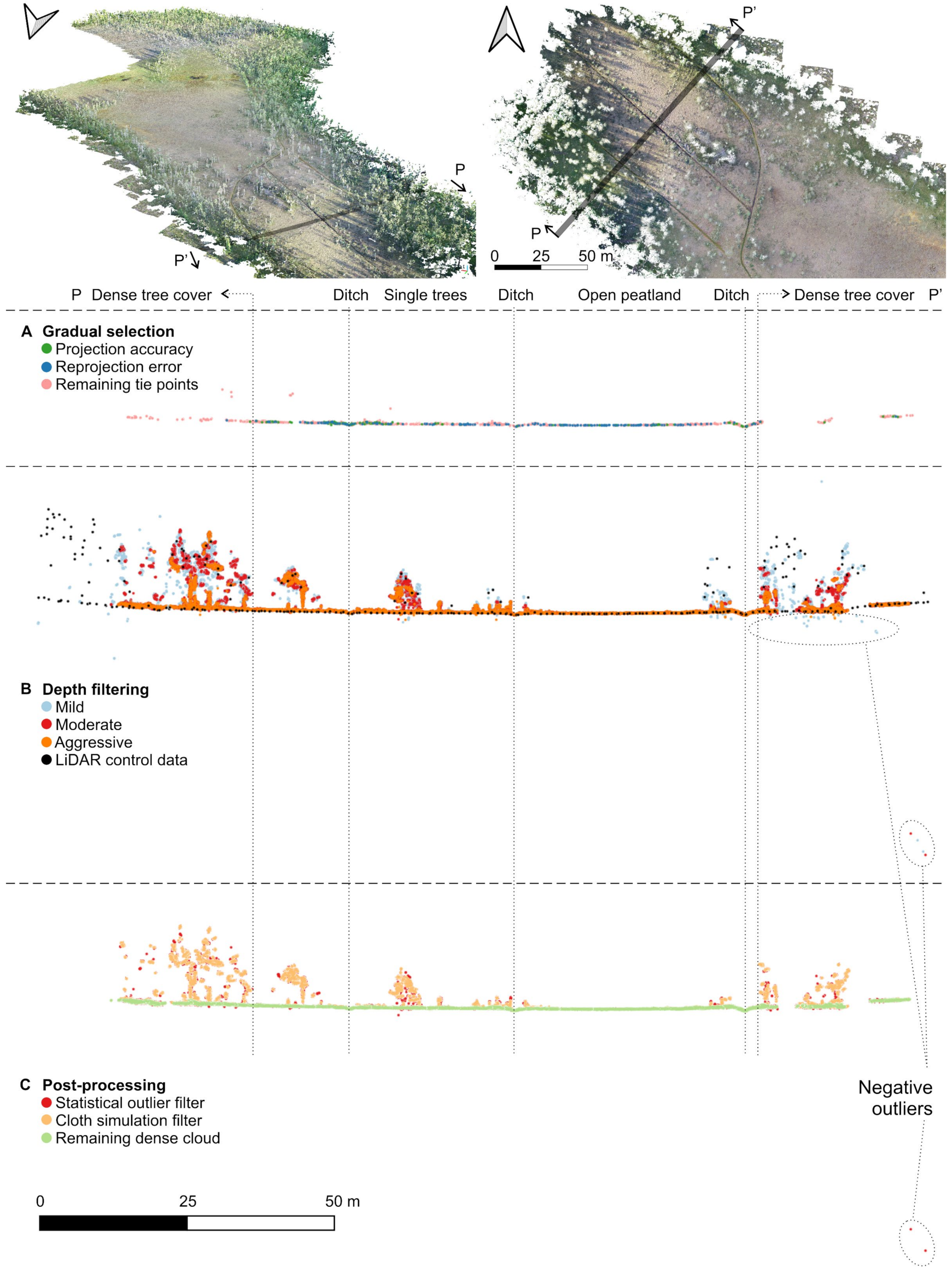
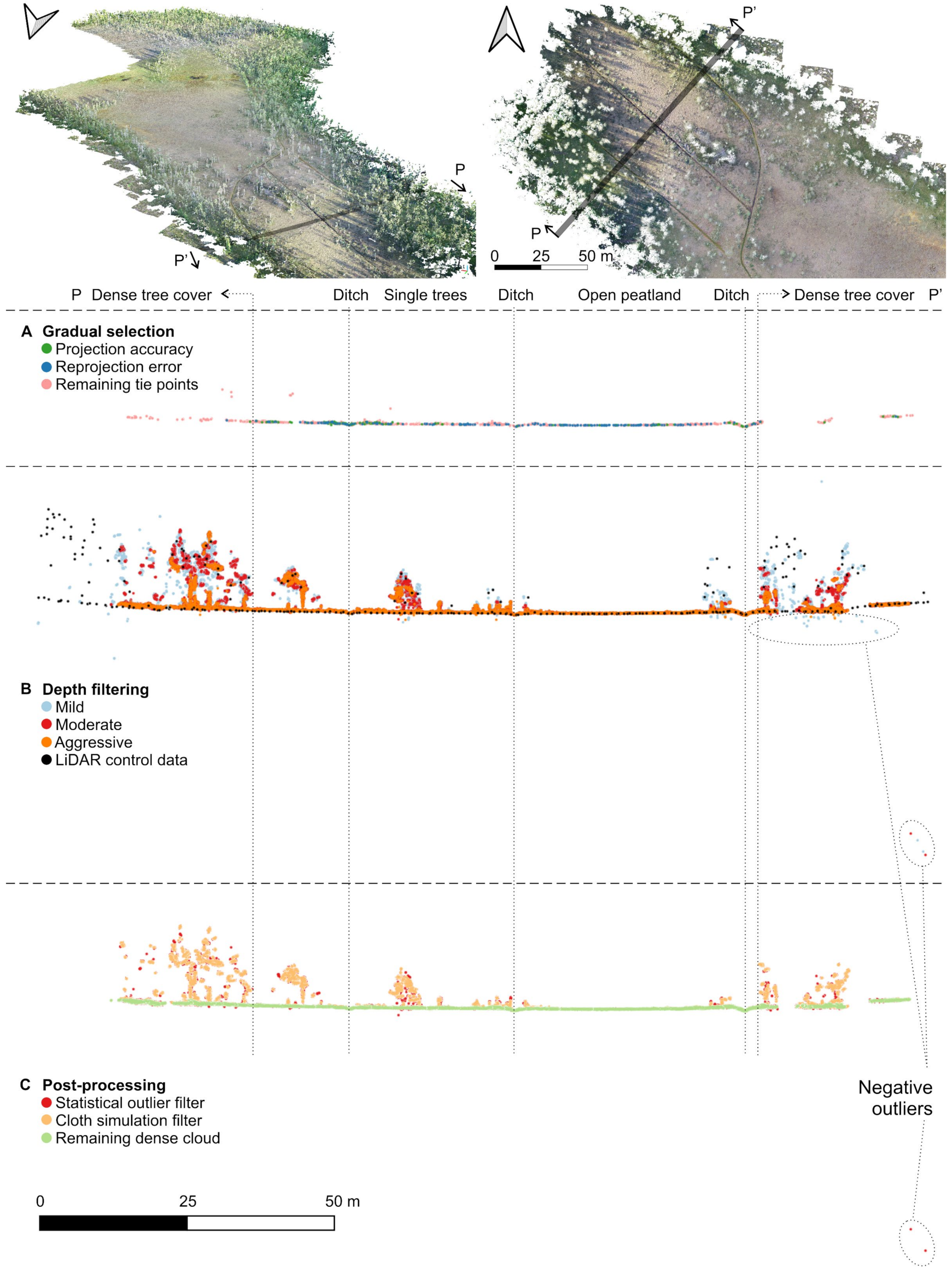
2.4. Noise Removal and Extraction of the Terrain Model
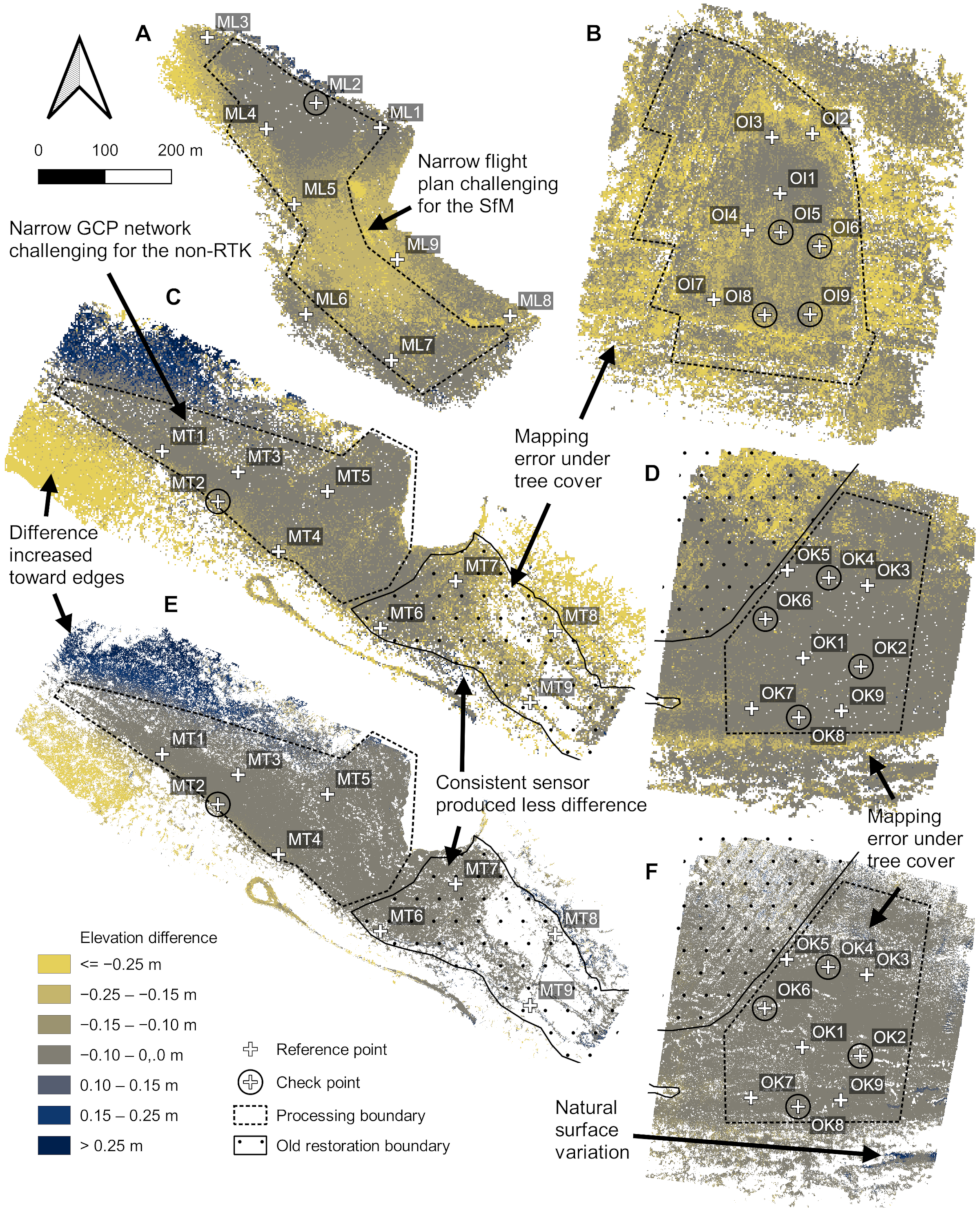
2.5. Evaluation of the Terrain Model
2.6. Topographical Analysis
2.7. Regression of Field Measurements on the Predicted Wetness
3. Results
3.1. Structure-From-Motion Accuracy
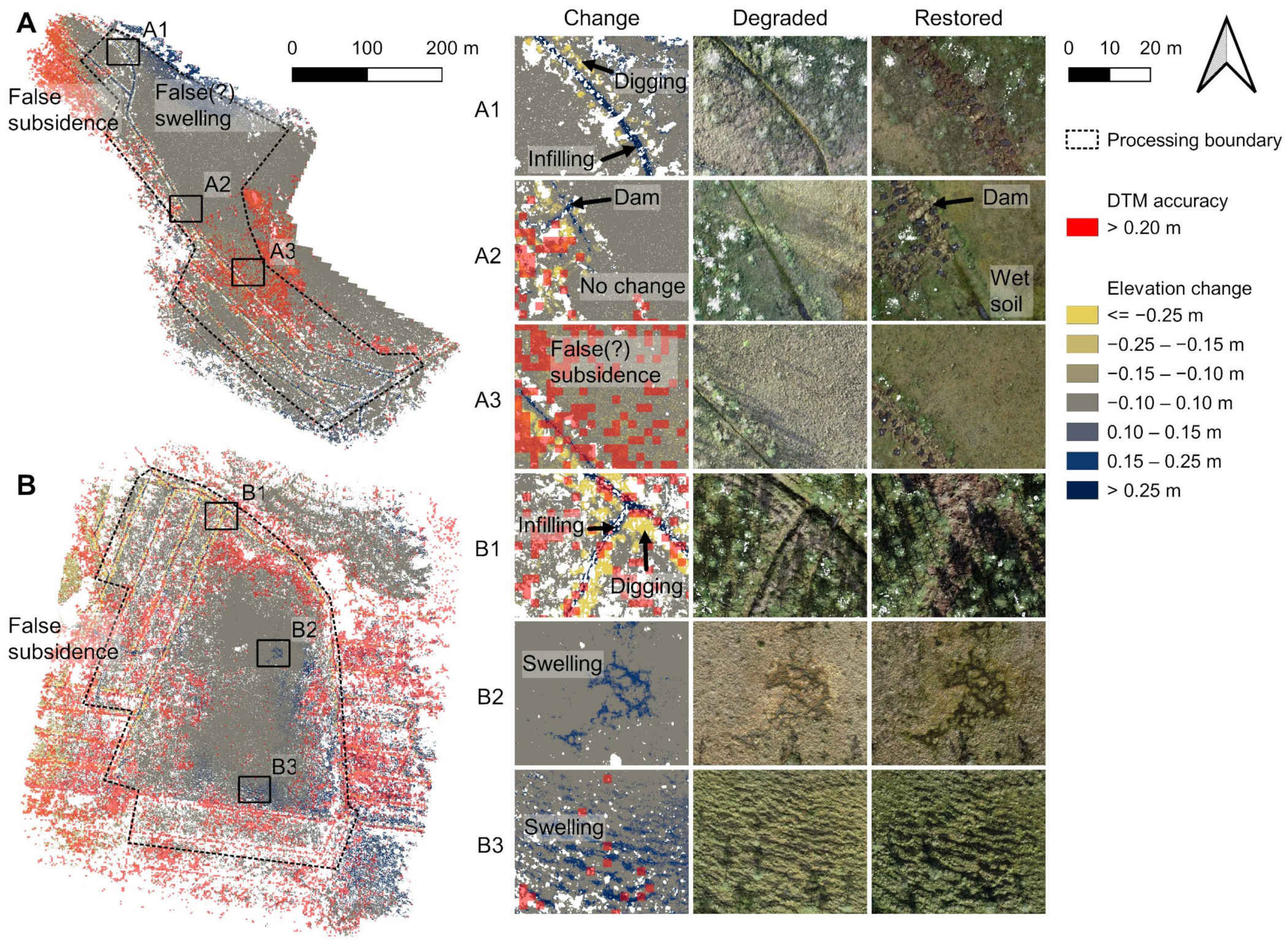
3.2. Topographical Changes Due to the Restoration
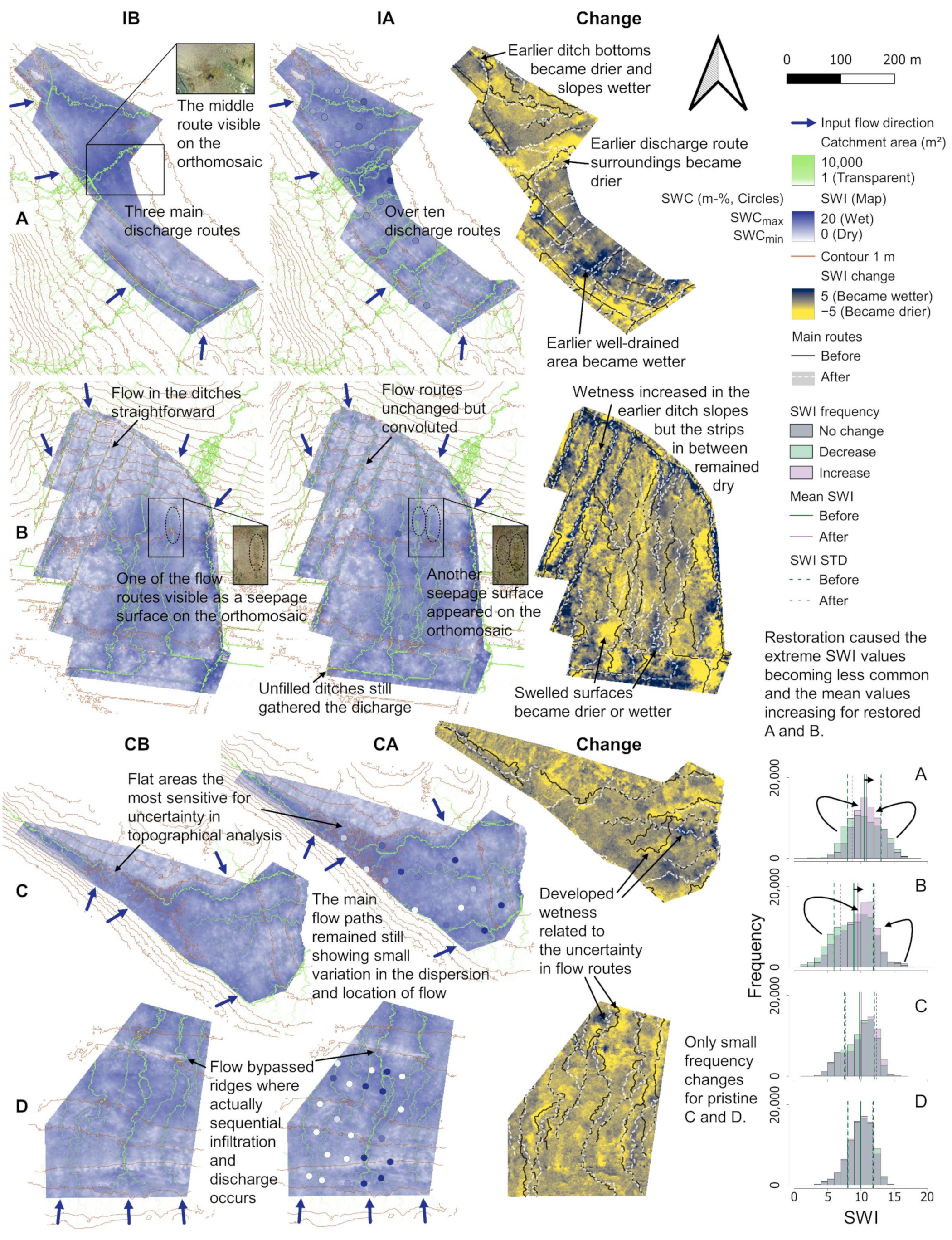
3.3. Changes in Flow Accumulation and Wetness
3.4. Sensitivity of the Topographic Analysis for DTM Uncertainties
4. Discussion
4.1. UAS Mapping and SfM Processing Experiences
4.2. Topographical Aspects in Peatland Restoration
4.3. Observations from the Control Data
4.4. Limitations of Topographical Analysis
4.5. Management Implications and Wider Applicability
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D | Three-dimensional |
| CA | Control After (state at the control site after the restoration at the intervention site) |
| CB | Control Before (state at the control site before the restoration at the intervention site) |
| CSF | Cloth Simulation Filter |
| DEM | Digital Elevation Model |
| DSM | Digital Surface Model |
| DTM | Digital Terrain Model |
| GCP | Ground Control Point |
| GNSS | Global Navigation Satellite System |
| IA | Intervention After (state at the intervention site after the restoration) |
| IB | Intervention Before (state at the intervention site before the restoration) |
| LiDAR | Light Detection and Ranging |
| NLS | National Land Survey of Finland |
| RMSE | Root Mean Square Error |
| RTK | Real-Time Kinematic |
| SfM | Structure-from-Motion |
| SWC | Soil Water Content |
| SWI | Saga Wetness Index |
| STD | Standard Deviation |
| SOR | Statistical Outlier Removal |
| TWI | Topographic Wetness Index |
| UAS | Unmanned Aircraft System |
References
- Price, J.; Evans, C.; Evans, M.; Allott, T.; Shuttleworth, E. Peatland restoration and hydrology. In Peatland Restoration and Ecosystem Services: Science, Policy and Practice; Cambridge University Press: Cambridge, UK, 2016; pp. 77–94. [Google Scholar] [CrossRef]
- Minayeva, T.; Bragg, O.; Sirin, A. Peatland biodiversity and its restoration. In Peatland Restoration and Ecosystem Services: Science, Policy and Practice; Ecological Reviews; Bonn, A., Allott, T., Evans, M., Joosten, H., Stoneman, R., Eds.; Cambridge University Press: Cambridge, UK, 2016; pp. 44–62. [Google Scholar] [CrossRef] [Green Version]
- Joosten, H.; Sirin, A.; Couwenberg, J.; Laine, J.; Smith, P. The role of peatlands in climate regulation. In Peatland Restoration and Ecosystem Services: Science, Policy and Practice; Cambridge University Press: Cambridge, UK, 2016; Volume 66. [Google Scholar] [CrossRef]
- Holden, J.; Chapman, P.J.; Labadz, J.C. Artificial drainage of peatlands: Hydrological and hydrochemical process and wetland restoration. Prog. Phys. Geogr. 2004, 28, 95–123. [Google Scholar] [CrossRef] [Green Version]
- Patberg, W.; Baaijens, G.J.; Smolders, A.J.; Grootjans, A.P.; Elzenga, J.T.M. The importance of groundwater-derived carbon dioxide in the restoration of small Sphagnum bogs. Preslia 2013, 85, 389–403. [Google Scholar]
- Frank, S.; Tiemeyer, B.; Gelbrecht, J.; Freibauer, A. High soil solution carbon and nitrogen concentrations in a drained Atlantic bog are reduced to natural levels by 10 years of rewetting. Biogeosciences 2014, 11, 2309–2324. [Google Scholar] [CrossRef] [Green Version]
- McCarter, C.P.; Price, J.S. The hydrology of the Bois-des-Bel bog peatland restoration: 10 years post-restoration. Ecol. Eng. 2013, 55, 73–81. [Google Scholar] [CrossRef]
- Price, J.S.; Heathwaite, A.L.; Baird, A.J. Hydrological processes in abandoned and restored peatlands: An overview of management approaches. Wetl. Ecol. Manag. 2003, 11, 65–83. [Google Scholar] [CrossRef]
- Similä, M.; Aapala, K.; Penttinen, J. Ecological Restoration in Drained Peatlands-Best Practices from Finland; Metsähallitus, Natural Heritage Services and Finnish Environment Institute SYKE: Helsinki, Finland, 2014; 8p, Available online: https://julkaisut.metsa.fi/julkaisut/show/1733 (accessed on 31 May 2022).
- Laine, A.; Leppälä, M.; Tarvainen, O.; Päätalo, M.; Seppänen, R.; Tolvanen, A. Restoration of managed pine fens: Effect on hydrology and vegetation. Appl. Veg. Sci. 2011, 14, 340–349. [Google Scholar] [CrossRef]
- Menberu, M.; Tahvanainen, T.; Marttila, H.; Irannezhad, M.; Ronkanen, A.-K.; Penttinen, J.; Kløve, B. Watertable-dependent hydrological changes following peatland drainage and restoration: Analysis of restoration success. Water Resour. Res. 2016, 52, 3742–3760. [Google Scholar] [CrossRef] [Green Version]
- Tolvanen, A.; Tarvainen, O.; Laine, A.M. Soil and water nutrients in stem-only and whole-tree harvest treatments in restored boreal peatlands. Restor. Ecol. 2020, 28, 1357–1364. [Google Scholar] [CrossRef]
- Food and Agriculture Organization (FAO). Peatlands Mapping and Monitoring—Recommendations and Technical Overview; FAO: Rome, Italy, 2020. [Google Scholar] [CrossRef]
- Hooijer, A.; Page, S.; Jauhiainen, J.; Lee, W.A.; Lu, X.X.; Idris, A.; Anshari, G. Subsidence and carbon loss in drained tropical peatlands. Biogeosciences 2012, 9, 1053–1071. [Google Scholar] [CrossRef] [Green Version]
- Stephens, J.C.; Allen, L.H., Jr.; Chen, E. Organic soil subsidence. Rev. Eng. Geol. 1984, 6, 107–122. [Google Scholar] [CrossRef]
- Ikkala, L.; Ronkanen, A.K.; Utriainen, O.; Kløve, B.; Marttila, H. Peatland subsidence enhances cultivated lowland flood risk. Soil Tillage Res. 2021, 212, 105078. [Google Scholar] [CrossRef]
- Haapalehto, T.O.; Vasander, H.; Jauhiainen, S.; Tahvanainen, T.; Kotiaho, J.S. The effects of peatland restoration on water-table depth, elemental concentrations, and vegetation: 10 years of changes. Restor. Ecol. 2011, 19, 587–598. [Google Scholar] [CrossRef]
- Lovitt, J.; Rahman, M.M.; McDermid, G.J. Assessing the value of UAV photogrammetry for characterizing terrain in complex peatlands. Remote Sens. 2017, 9, 715. [Google Scholar] [CrossRef] [Green Version]
- Dale, J.; Burnside, N.G.; Strong, C.J.; Burgess, H.M. The use of small-Unmanned Aerial Systems for high resolution analysis for intertidal wetland restoration schemes. Ecol. Eng. 2020, 143, 105695. [Google Scholar] [CrossRef]
- Ahmad, S.; Liu, H.; Günther, A.; Couwenberg, J.; Lennartz, B. Long-term rewetting of degraded peatlands restores hydrological buffer function. Sci. Total Environ. 2020, 749, 141571. [Google Scholar] [CrossRef]
- De Roos, S.; Turner, D.; Lucieer, A.; Bowman, D.M. Using digital surface models from UAS imagery of fire damaged sphagnum peatlands for monitoring and hydrological restoration. Drones 2018, 2, 45. [Google Scholar] [CrossRef] [Green Version]
- Kalacska, M.; Arroyo-Mora, J.P.; Lucanus, O. Comparing UAS LiDAR and Structure-from-Motion Photogrammetry for peatland mapping and virtual reality (VR) visualization. Drones 2021, 5, 36. [Google Scholar] [CrossRef]
- Deliry, S.I.; Avdan, U. Accuracy of Unmanned Aerial Systems Photogrammetry and Structure from Motion in Surveying and Mapping: A Review. J. Indian Soc. Remote Sens. 2021, 49, 1997–2017. [Google Scholar] [CrossRef]
- Dronova, I.; Kislik, C.; Dinh, Z.; Kelly, M. A Review of Unoccupied Aerial Vehicle Use in Wetland Applications: Emerging Opportunities in Approach, Technology, and Data. Drones 2021, 5, 45. [Google Scholar]
- Jeziorska, J. UAS for Wetland Mapping and Hydrological Modeling. Remote Sens. 2019, 11, 1997. [Google Scholar] [CrossRef] [Green Version]
- Jaud, M.; Passot, S.; Allemand, P.; Le Dantec, N.; Grandjean, P.; Delacourt, C. Suggestions to Limit Geometric Distortions in the Reconstruction of Linear Coastal Landforms by SfM Photogrammetry with PhotoScan® and MicMac® for UAV Surveys with Restricted GCPs Pattern. Drones 2018, 3, 2. [Google Scholar] [CrossRef] [Green Version]
- Harris, A.; Baird, A.J. Microtopographic drivers of vegetation patterning in blanket peatlands recovering from erosion. Ecosystems 2019, 22, 1035–1054. [Google Scholar] [CrossRef] [Green Version]
- Bertacchi, A.; Giannini, V.; Di Franco, C.; Silvestri, N. Using unmanned aerial vehicles for vegetation mapping and identification of botanical species in wetlands. Landsc. Ecol. Eng. 2019, 15, 231–240. [Google Scholar] [CrossRef]
- Giannini, V.; Bertacchi, A.; Bonari, E.; Silvestri, N. Recolonisation by spontaneous vegetation of a rewetted peatland after topsoil removal: A focus on biomass production and nutrient uptake. Wetlands 2019, 39, 1079–1087. [Google Scholar] [CrossRef]
- Kameoka, T.; Kozan, O.; Hadi, S.; Asnawi; Hasrullah. Monitoring the groundwater level in tropical peatland through UAV mapping of soil surface temperature: A pilot study in Tanjung Leban, Indonesia. Remote Sens. Lett. 2021, 12, 542–552. [Google Scholar] [CrossRef]
- Knoth, C.; Klein, B.; Prinz, T.; Kleinebecker, T. Unmanned aerial vehicles as innovative remote sensing platforms for high-resolution infrared imagery to support restoration monitoring in cut-over bogs. Appl. Veg. Sci. 2013, 16, 509–517. [Google Scholar] [CrossRef]
- White, L.; McGovern, M.; Hayne, S.; Touzi, R.; Pasher, J.; Duffe, J. Investigating the Potential Use of RADARSAT-2 and UAS imagery for Monitoring the Restoration of Peatlands. Remote Sens. 2020, 12, 2383. [Google Scholar] [CrossRef]
- Beyer, F.; Jurasinski, G.; Couwenberg, J.; Grenzdörffer, G. Multisensor data to derive peatland vegetation communities using a fixed-wing unmanned aerial vehicle. Int. J. Remote Sens. 2019, 40, 9103–9125. [Google Scholar] [CrossRef]
- Harvey, M.C.; Hare, D.K.; Hackman, A.; Davenport, G.; Haynes, A.B.; Helton, A.; Lane, J.W.; Briggs, M.A. Evaluation of Stream and Wetland Restoration Using UAS-Based Thermal Infrared Mapping. Water 2019, 11, 1568. [Google Scholar] [CrossRef] [Green Version]
- Rycroft, D.W.; Williams, D.J.A.; Ingram, H.A.P. The transmission of water through peat: I. Review. J. Ecol. 1975, 63, 535–556. [Google Scholar] [CrossRef]
- Gillin, C.P.; Bailey, S.W.; McGuire, K.J.; Prisley, S.P. Evaluation of LiDAR-derived DEMs through terrain analysis and field comparison. Photogramm. Eng. Remote Sens. 2015, 81, 387–396. [Google Scholar] [CrossRef] [Green Version]
- Riihimäki, H.; Kemppinen, J.; Kopecký, M.; Luoto, M. Topographic Wetness Index as a Proxy for Soil Moisture: The Importance of Flow-Routing Algorithm and Grid Resolution. Water Resour. Res. 2021, 57, e2021WR029871. [Google Scholar] [CrossRef]
- Rinderer, M.; Van Meerveld, H.J.; McGlynn, B.L. From points to patterns: Using groundwater time series clustering to investigate subsurface hydrological connectivity and runoff source area dynamics. Water Resour. Res. 2019, 55, 5784–5806. [Google Scholar] [CrossRef]
- Thomas, I.A.; Jordan, P.; Shine, O.; Fenton, O.; Mellander, P.E.; Dunlop, P.; Murphy, P.N. Defining optimal DEM resolutions and point densities for modelling hydrologically sensitive areas in agricultural catchments dominated by microtopography. Int. J. Appl. Earth Obs. Geoinf. 2017, 54, 38–52. [Google Scholar] [CrossRef] [Green Version]
- Ågren, A.M.; Lidberg, W.; Strömgren, M.; Ogilvie, J.; Arp, P.A. Evaluating digital terrain indices for soil wetness mapping–a Swedish case study. Hydrol. Earth Syst. Sci. 2014, 18, 3623–3634. [Google Scholar] [CrossRef] [Green Version]
- Grabs, T.; Seibert, J.; Bishop, K.; Laudon, H. Modeling spatial patterns of saturated areas: A comparison of the topographic wetness index and a dynamic distributed model. J. Hydrol. 2009, 373, 15–23. [Google Scholar] [CrossRef] [Green Version]
- Higginbottom, T.P.; Field, C.D.; Rosenburgh, A.E.; Wright, A.; Symeonakis, E.; Caporn, S.J. High-resolution wetness index mapping: A useful tool for regional scale wetland management. Ecol. Inform. 2018, 48, 89–96. [Google Scholar] [CrossRef] [Green Version]
- Richardson, M.C.; Fortin, M.J.; Branfireun, B.A. Hydrogeomorphic edge detection and delineation of landscape functional units from lidar digital elevation models. Water Resour. Res. 2009, 45, W10441. [Google Scholar] [CrossRef]
- Hasan, A.; Pilesjö, P.; Persson, A. On generating digital elevation models from liDAR data–resolution versus accuracy and topographic wetness index indices in northern peatlands. Geod. Cartogr. 2012, 38, 57–69. [Google Scholar] [CrossRef] [Green Version]
- Pilesjö, P.; Hasan, A. A triangular form-based multiple flow algorithm to estimate overland flow distribution and accumulation on a digital elevation model. Trans. GIS 2014, 18, 108–124. [Google Scholar] [CrossRef] [Green Version]
- Kemppinen, J.; Niittynen, P.; Riihimäki, H.; Luoto, M. Modelling soil moisture in a high-latitude landscape using LiDAR and soil data. Earth Surf. Process. Landf. 2018, 43, 1019–1031. [Google Scholar] [CrossRef]
- Sørensen, R.; Zinko, U.; Seibert, J. On the calculation of the topographic wetness index: Evaluation of different methods based on field observations. Hydrol. Earth Syst. Sci. 2006, 10, 101–112. [Google Scholar] [CrossRef] [Green Version]
- Finnish Meteorological Institute. Meteorological Data from the Open Data Download Service; Finnish Meteorological Institute: Helsinki, Finland, 2022. [Google Scholar]
- Ruuhijärvi, R.; Hosiaisluoma, V. Mires 1: 1000000. In Atlas of Finland; Folio 141–143, Map Appendix 2; National Board of Survey & Geographical Society of Finland: Helsinki, Finland, 1988. [Google Scholar]
- Finnish Environment Institute. NATURA 2000 Data Form FI0700046 Mujejärvi; Finnish Environment Institute: Helsinki, Finland, 2002. (In Finnish) [Google Scholar]
- Finnish Environment Institute. NATURA 2000 Data Form FI1200223 Jonkerinsalon Alue; Finnish Environment Institute: Helsinki, Finland, 2002. (In Finnish) [Google Scholar]
- Kharitonov, L.Y. Type sections, stratigraphy and problems relating to structure and magmatism of Karelides. Int. Geol. Rev. 1965, 7, 592–613. [Google Scholar] [CrossRef]
- Korkalainen, T.; Laurén, A.; Koivusalo, H.; Kokkonen, T. Impacts of peatland drainage on the properties of typical water flow paths determined from a digital elevation model. Hydrol. Res. 2008, 39, 359–368. [Google Scholar] [CrossRef]
- Geological Survey of Finland. Superficial Deposits of Finland 1:200 000 (Sediment Polygons). 2010. Available online: https://hakku.gtk.fi/en/locations/search?location_id=3 (accessed on 15 January 2022).
- Finnish Environment Institute. NATURA 2000 Data Form FI1103829 Olvassuo; Finnish Environment Institute: Helsinki, Finland, 2002. (In Finnish) [Google Scholar]
- Metsähallitus. Metsähallitus Assessment of Establishment Conditions of Olvassuo National Park (Metsähallituksen Selvitys Olvassuon Kansallispuiston Perustamisedellytyksistä); Metsähallitus: Vantaa, Finland, 2013. (In Finnish) [Google Scholar]
- Heikkilä, H.; Kukko-oja, K.; Laitinen, J.; Rehell, S.; Sallantaus, T. Evaluation of the Influence of Groundwater Uptake from Viinivaara on the Nature of Olvassuo Natura 2000 Area (Arvio Viinivaaran Pohjavedenottohankkeen Vaikutuksesta Olvassuon Natura 2000-Alueen Luontoon). 2001. Available online: http://urn.fi/URN:ISBN:951-40-1769-2 (accessed on 15 January 2022). (In Finnish).
- Isokangas, E.; Rossi, P.M.; Ronkanen, A.K.; Marttila, H.; Rozanski, K.; Kløve, B. Quantifying spatial groundwater dependence in peatlands through a distributed isotope mass balance approach. Water Resour. Res. 2017, 53, 2524–2541. [Google Scholar] [CrossRef]
- Woodget, A.S.; Fyffe, C.; Carbonneau, P.E. From manned to unmanned aircraft: Adapting airborne particle size mapping methodologies to the characteristics of sUAS and SfM. Earth Surf. Process. Landf. 2018, 43, 857–870. [Google Scholar] [CrossRef]
- Agisoft. Agisoft Metashape User Manual: Professional Edition, Version 1.7. 2021. Available online: https://www.agisoft.com/pdf/metashape-pro_1_7_en.pdf (accessed on 15 January 2022).
- Gonçalves, G.; Gonçalves, D.; Gómez-Gutiérrez, Á.; Andriolo, U.; Pérez-Alvárez, J.A. 3D Reconstruction of Coastal Cliffs from Fixed-Wing and Multi-Rotor UAS: Impact of SfM-MVS Processing Parameters, Image Redundancy and Acquisition Geometry. Remote Sens. 2021, 13, 1222. [Google Scholar] [CrossRef]
- Mercer, J.J.; Westbrook, C.J. Ultrahigh-resolution mapping of peatland microform using ground-based structure from motion with multiview stereo. J. Geophys. Res. Biogeosci. 2016, 121, 2901–2916. [Google Scholar] [CrossRef] [Green Version]
- Pugh, N.A.; Thorp, K.R.; Gonzalez, E.M.; Elshikha, D.E.M.; Pauli, D. Comparison of image georeferencing strategies for agricultural applications of small unoccupied aircraft systems. Plant Phenome J. 2021, 4, e20026. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.J.; García-Ferrer, A.; Pérez-Porras, F.J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Stott, E.; Williams, R.D.; Hoey, T.B. Ground Control Point Distribution for Accurate Kilometre-Scale Topographic Mapping Using an RTK-GNSS Unmanned Aerial Vehicle and SfM Photogrammetry. Drones 2020, 4, 55. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.; Rodríguez-Pérez, J.; Ordóñez, C. Accuracy of Unmanned Aerial Vehicle (UAV) and SfM Photogrammetry Survey as a Function of the Number and Location of Ground Control Points Used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef] [Green Version]
- Röder, M.; Hill, S.; Latifi, H. Best Practice Tutorial: Technical Handling of the UAV “DJI Phantom 3 Professional” and Processing of the Acquired Data; Department of Remote Sensing, University of Würzburg: Würzburg, Germany, 2017. [Google Scholar]
- Li, Y.; Baciu, G. PC-OPT: A SfM point cloud denoising algorithm. In Intelligent Data Engineering and Automated Learning—IDEAL 2020; Lecture Notes in Computer Science; Analide, C., Novais, P., Camacho, D., Yin, H., Eds.; Springer: Cham, Switzerland, 2020; Volume 12489. [Google Scholar] [CrossRef]
- Carrilho, A.C.; Galo, M.; Santos, R.C. Statistical Outlier Detection Method for Airborne LIDAR Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-1, 87–92. [Google Scholar] [CrossRef] [Green Version]
- Rusu, R.B.; Cousins, S. 3D is here: Point Cloud Library (PCL). In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Process. Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Mattivi, P.; Franci, F.; Lambertini, A.; Bitelli, G. TWI computation: A comparison of different open source GISs. Open Geospat. Data Softw. Stand. 2019, 4, 6. [Google Scholar] [CrossRef]
- Beven, K.J.; Kirkby, M.J. A physically based, variable contributing area model of basin hydrology/Un modèle à base physique de zone d’appel variable de l’hydrologie du bassin versant. Hydrol. Sci. J. 1979, 24, 43–69. [Google Scholar] [CrossRef] [Green Version]
- Gruber, S.; Peckham, S. Land-surface parameters and objects in hydrology. Dev. Soil Sci. 2009, 33, 171–194. [Google Scholar]
- Böhner, J.; Selige, T. Spatial prediction of soil attributes using terrain analysis and climate regionalisation. In SAGA-Analyses and Modelling Applications; Goltze: Göttingen, Germany, 2006. [Google Scholar]
- Freeman, T.G. Calculating catchment area with divergent flow based on a regular grid. Comput. Geosci. 1991, 17, 413–422. [Google Scholar] [CrossRef]
- Lidberg, W.; Nilsson, M.; Lundmark, T.; Ågren, A.M. Evaluating preprocessing methods of digital elevation models for hydrological modelling. Hydrol. Process. 2017, 31, 4660–4668. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Liu, H. An efficient method for identifying and filling surface depressions in digital elevation models for hydrologic analysis and modelling. Int. J. Geogr. Inf. Sci. 2006, 20, 193–213. [Google Scholar] [CrossRef]
- Moudrý, V.; Gdulová, K.; Fogl, M.; Klápště, P.; Urban, R.; Komárek, J.; Moudrá, L.; Štroner, M.; Barták, V.; Solský, M. Comparison of leaf-off and leaf-on combined UAV imagery and airborne LiDAR for assessment of a post-mining site terrain and vegetation structure: Prospects for monitoring hazards and restoration success. Appl. Geogr. 2019, 104, 32–41. [Google Scholar] [CrossRef]
- Lieffers, V.J.; Rothwell, R.L. Rooting of peatland black spruce and tamarack in relation to depth of water table. Can. J. Bot. 1987, 65, 817–821. [Google Scholar] [CrossRef]
- Nesbit, P.; Hugenholtz, C. Enhancing UAV–SfM 3D Model Accuracy in High-Relief Landscapes by Incorporating Oblique Images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef] [Green Version]
- Štroner, M.; Urban, R.; Seidl, J.; Reindl, T.; Brouček, J. Photogrammetry Using UAV-Mounted GNSS RTK: Georeferencing Strategies without GCPs. Remote Sens. 2021, 13, 1336. [Google Scholar] [CrossRef]
- Przybilla, H.J.; Bäumker, M.; Luhmann, T.; Hastedt, H.; Eilers, M. Interaction between direct georeferencing, control point configuration and camera self-calibration for RTK-based UAV photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 485–492. [Google Scholar] [CrossRef]
- Mayer, C.; Pereira, L.G.; Kersten, T.P. A comprehensive workflow to process UAV images for the efficient production of accurate geo-information. In IX National Conference on Cartography and Geodesy; Ordem dos Engenheiros: Lisbon, Portugal, 2018; pp. 1–8. [Google Scholar]
- Tinkham, W.T.; Swayze, N.C. Influence of Agisoft Metashape Parameters on UAS Structure from Motion Individual Tree Detection from Canopy Height Models. Forests 2021, 12, 250. [Google Scholar] [CrossRef]
- Agisoft. 2022. Available online: https://www.agisoft.com/forum/index.php (accessed on 31 May 2022).
- Howie, S.A.; Hebda, R.J. Bog surface oscillation (mire breathing): A useful measure in raised bog restoration. Hydrol. Process. 2018, 32, 1518–1530. [Google Scholar] [CrossRef]
- Rinderer, M.; Van Meerveld, H.J.; Seibert, J. Topographic controls on shallow groundwater levels in a steep, prealpine catchment: When are the TWI assumptions valid? Water Resour. Res. 2014, 50, 6067–6080. [Google Scholar] [CrossRef]
- Kopecký, M.; Macek, M.; Wild, J. Topographic Wetness Index calculation guidelines based on measured soil moisture and plant species composition. Sci. Total Environ. 2021, 757, 143785. [Google Scholar] [CrossRef]
- Kopecký, M.; Čížková, Š. Using topographic wetness index in vegetation ecology: Does the algorithm matter? Appl. Veg. Sci. 2010, 13, 450–459. [Google Scholar] [CrossRef]
- Hillman, S.; Hally, B.; Wallace, L.; Turner, D.; Lucieer, A.; Reinke, K.; Jones, S. High-Resolution Estimates of Fire Severity—An Evaluation of UAS Image and LiDAR Mapping Approaches on a Sedgeland Forest Boundary in Tasmania, Australia. Fire 2021, 4, 14. [Google Scholar] [CrossRef]
- Rehell, S.; Tahvanainen, T. Mire Wildernes—Olvassuo. In Mires of Finland–Daughters of the Baltic Sea; The Finnish Environment 28/2006; Finnish Environment Institute: Helsinki, Finland, 2006; pp. 49–55. [Google Scholar]
- Lendzioch, T.; Langhammer, J.; Vlček, L.; Minařík, R. Mapping the Groundwater Level and Soil Moisture of a Montane Peat Bog Using UAV Monitoring and Machine Learning. Remote Sens. 2021, 13, 907. [Google Scholar] [CrossRef]
- Pricope, N.G.; Halls, J.N.; Mapes, K.L.; Baxley, J.B.; Wu, J.J. Quantitative Comparison of UAS-Borne LiDAR Systems for High-Resolution Forested Wetland Mapping. Sensors 2020, 20, 4453. [Google Scholar] [CrossRef] [PubMed]
- Petrasova, A.; Mitasova, H.; Petras, V.; Jeziorska, J. Fusion of high-resolution DEMs for water flow modeling. Open Geospat. Data Softw. Stand. 2017, 2, 6. [Google Scholar] [CrossRef] [Green Version]
- Wallace, C.; McCarty, G.; Lee, S.; Brooks, R.; Veith, T.; Kleinman, P.; Sadeghi, A. Evaluating Concentrated Flowpaths in Riparian Forest Buffer Contributing Areas Using LiDAR Imagery and Topographic Metrics. Remote Sens. 2018, 10, 614. [Google Scholar] [CrossRef]
- Rheinwalt, A.; Goswami, B.; Bookhagen, B. A network-based flow accumulation algorithm for point clouds: Facet-Flow Networks (FFNs). J. Geophys. Res. Earth Surf. 2019, 124, 2013–2033. [Google Scholar] [CrossRef]
- Zhou, Q.; Pilesjö, P.; Chen, Y. Estimating surface flow paths on a digital elevation model using a triangular facet network. Water Resour. Res. 2011, 47, W07522. [Google Scholar] [CrossRef]
- Mertes, J.R.; Gulley, J.D.; Benn, D.I.; Thompson, S.S.; Nicholson, L.I. Using structure-from-motion to create glacier DEMs and orthoimagery from historical terrestrial and oblique aerial imagery. Earth Surf. Process. Landf. 2017, 42, 2350–2364. [Google Scholar] [CrossRef]
- Hesse, R. Three-dimensional vegetation structure of Tillandsia latifolia on a coppice dune. J. Arid Environ. 2014, 109, 23–30. [Google Scholar] [CrossRef]
- Rusu, R.B.; Blodow, N.; Marton, Z.; Soos, A.; Beetz, M. Towards 3D object maps for autonomous household robots. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 3191–3198. [Google Scholar]
- Rouzbeh Kargar, A.; MacKenzie, R.A.; Apwong, M.; Hughes, E.; van Aardt, J. Stem and root assessment in mangrove forests using a low-cost, rapid-scan terrestrial laser scanner. Wetl. Ecol. Manag. 2020, 28, 883–900. [Google Scholar] [CrossRef]
- Stovall, A.E.L.; Diamond, J.S.; Slesak, R.A.; McLaughlin, D.L.; Shugart, H. Quantifying wetland microtopography with terrestrial laser scanning. Remote Sens. Environ. 2019, 232, 111271. [Google Scholar] [CrossRef]
- Wagers, S.; Castilla, G.; Filiatrault, M.; Sanchez-Azofeifa, G.A. Using TLS-Measured Tree Attributes to Estimate Aboveground Biomass in Small Black Spruce Trees. Forests 2021, 12, 1521. [Google Scholar] [CrossRef]
- Pirotti, F.; Ravanelli, R.; Fissore, F.; Masiero, A. Implementation and assessment of two density-based outlier detection methods over large spatial point clouds. Open Geospat. Data Softw. Stand. 2018, 3, 1–12. [Google Scholar] [CrossRef]
- Chen, S.; Truong-Hong, L.; O’Keeffe, E.; Laefer, D.F.; Mangina, E. Outlier detection of point clouds generating from low cost UAVs for bridge inspection. In Life Cycle Analysis and Assessment in Civil Engineering: Towards an Integrated Vision, Proceedings of the Sixth International Symposium on Life-Cycle Civil Engineering (IALCCE 2018), Ghent, Belgium, 28–31 October 2018; Caspeele, R., Taerwe, L., Frangopol, D.M., Eds.; CRC Press: London, UK, 2018; pp. 1969–1975. [Google Scholar]
- Serifoglu Yilmaz, C.; Yilmaz, V.; Güngör, O. Investigating the performances of commercial and non-commercial software for ground filtering of UAV-based point clouds. Int. J. Remote Sens. 2018, 39, 5016–5042. [Google Scholar] [CrossRef]
- Klápště, P.; Fogl, M.; Barták, V.; Gdulová, K.; Urban, R.; Moudrý, V. Sensitivity analysis of parameters and contrasting performance of ground filtering algorithms with UAV photogrammetry-based and LiDAR point clouds. Int. J. Digit. Earth 2020, 13, 1672–1694. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Brieger, F.; Herzschuh, U.; Pestryakova, L.A.; Bookhagen, B.; Zakharov, E.S.; Kruse, S. Advances in the Derivation of Northeast Siberian Forest Metrics Using High-Resolution UAV-Based Photogrammetric Point Clouds. Remote Sens. 2019, 11, 1447. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Bellman, C.; Hally, B.; Hernandez, J.; Jones, S.; Hillman, S. Assessing the Ability of Image Based Point Clouds Captured from a UAV to Measure the Terrain in the Presence of Canopy Cover. Forests 2019, 10, 284. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Mujejärvi | Olvassuo | ||
|---|---|---|---|---|
| Study Site | Loukkusuo | Tammalampi | Iso Leväniemi | Kirkaslampi |
| Site type | Restoration | Control | Restoration | Control |
| Peatland type in the pristine state | Oligotrophic low-sedge pine fen | Oligotrophic low-sedge pine fen | Meso-eutrophic fen and flark fen | Meso-eutrophic sedge-dominated flark fen |
| Drained (approximate) | 1980 | No drainage | 1970 | No drainage |
| Restored | 2020/07 | - | 2019/10 | - |
| Area of the restoration site (ha) 1 | 108.8 | - | 45.9 | - |
| Area of the watershed basin upslope (ha) | 58.8 | 18.3 | 168.3 | 12.5 |
| Area of the processing boundary (ha) | 7.6 | 7.6 | 13.8 | 8.2 |
| Mean slope inside the watershed basin upslope (%) 2 | 8.8 | 6.1 | 6.5 | 3.6 |
| Mean slope inside the processing boundary (%) 2 | 3.6 | 3.8 | 5.3 | 3.3 |
| Site | Loukkusuo | Iso Leväniemi | Tammalampi | Kirkaslampi | ||||
|---|---|---|---|---|---|---|---|---|
| Site Type | Restoration | Restoration | Control | Control | ||||
| Campaign Type | IB | IA | IB | IA | CB | CA | CB | CA |
| Timing of campaign | 24/6/2019 | 18/82020 | 20/8/2019 | 21/8/2020 | 24/6/2019 | 18/8/2020 | 20/8/2019 | 21/8/2020 |
| Aircraft | Phantom 4 Pro | Phantom 4 RTK | Phantom 4 RTK | Phantom 4 RTK | Phantom 4 Pro | Phantom 4 RTK | Phantom 4 RTK | Phantom 4 RTK |
| Number of aligned cameras 1 | 769 | 749 | 439 | 438 | 672 | 832 | 296 | 339 |
| Flying altitude 2 (m) | 50 | 96 | 113 | 124 | 91 | 100 | 105 | 117 |
| Ground resolution (cm/pixel) | 1.24 | 2.38 | 2.81 | 3.08 | 3.33 | 2.50 | 2.58 | 2.89 |
| Coverage (ha) | 12.4 | 32.4 | 25.6 | 29.2 | 23.7 | 35.0 | 20.0 | 27.4 |
| Number of tie-points | 269,289 | 155,407 | 116,245 | 108,788 | 94,576 | 142,383 | 81,355 | 89,035 |
| Number of projections | 1,541,084 | 1,294,303 | 675,735 | 667,877 | 916,388 | 1,117,907 | 793,089 | 823,815 |
| RMSE of normalized reprojection (pixels) | 0.498 | 0.459 | 0.407 | 0.427 | 0.507 | 0.444 | 0.411 | 0.422 |
| Average tie-point multiplicity | 4.43 | 5.98 | 4.09 | 4.27 | 5.97 | 5.74 | 7.84 | 7.24 |
| Timing of reference campaign | 17/6/2020 | - | 17/6/2018 | - | 17/6/2020 | 17/6/2020 | 20/6/2018 and 19/8/2015 3 | 20/6/2018 and 19/8/2015 3 |
| Number of soil water content samples | - | 17 | - | 25 | - | 16 | - | 25 |
| Site | Loukkusuo | Iso Leväniemi | Tammalampi | Kirkaslampi | ||||
|---|---|---|---|---|---|---|---|---|
| Site type | Restoration | Restoration | Control | Control | ||||
| Campaign | IB | IA | IB | IA | CB | CA | CB | CA |
| (a) UAS checkpoint (mm) -RMSEXY -RMSEZ | 30.6 1 1.6 1 | 25.8 27.8 | 16.5 17.7 | 51.1 1 46.9 1 | 8.4 2 1.8 2 | 38.2 20.8 | 11.7 27.6 | 11.2 12.1 |
| -LoD | ±54.6 | ±98.3 | ±40.9 | ±59.1 | ||||
| (b) LiDAR control data (mm) -Whole dataset RMSEZ -Analysis area RMSEZ | 148.4 134.1 | - - | 207.8 173.4 | - - | 222.0 86.6 | 145.9 85.0 | 97.8 54.2 | 98.9 53.0 |
| -Analysis area LoD | ±371.7 3 | ±480.6 3 | ±237.8 | ±148.6 | ||||
| (c) Pristine UAS temporal (mm) -Whole dataset RMSEZ -Analysis area RMSEZ | - - | - - | 141.5 56.1 | 59.8 40.2 | ||||
| -Analysis area LoD 3 | - | - | ±155.5 3 | ±111.4 3 | ||||
| Site | Loukkusuo | Iso Leväniemi | Tammalampi | Kirkaslampi | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Site Type | Restoration | Restoration | Control | Control | ||||||||
| Campaign | IB | IA | Change | IB | IA | Change | CB | CA | Change | CB | CA | Change |
| (a) Cell statistics of the significant elevation changes 1 -Area elevated (ha) -Area elevated (%) 2 -Mean rise (mm) -STD rise (m) 3 -Area subsided (ha) -Area subsided (%) 2 -Mean subsidence (mm) -STD subsidence (mm) | - - - - - - - - | - - - - - - - - | 0.598 7.9 149.7 64.7 0.720 9.5 151.7 62.1 | - - - - - - - - | - - - - - - - - | 1.152 8.3 166.7 95.6 0.808 5.9 252.5 172.3 | - - - - - - - - | - - - - - - - - | 0.313 4.1 130.0 31.4 0.128 1.7 119.2 25.3 | - - - - - - - - | - - - - - - - - | 0.087 1.1 124.4 26.2 0.036 0.4 123.9 29.5 |
| (b) Total length of the main routes, proportional to the area of the processing boundary and the change (%) 4 -Total length (m) -Divided by area (m/m2) | 2612 344 | 3566 469 | +36.5 +36.5 | 4775 346 | 5983 434 | +25.3 +25.3 | 1910 251 | 1755 231 | −8.1 8.1 | 2914 355 | 3019 368 | +3.1 +3.1 |
| (c) SWI cell statistics and the change (%) 4 -Mean -STD | 10.55 2.52 | 10.86 2.14 | +2.9 −15.1 | 8.95 2.95 | 9.57 2.58 | +6.9 −12.5 | 9.81 2.23 | 10.05 2.31 | +2.4 +3,6 | 9.97 1.91 | 9.93 1.85 | −0.4 −3.1 |
| (d) SWC extreme values (m%) 5 -SWCmin -SWCmax | - - | 192 2143 | - - | - - | −158 3728 | - - | - - | 660 1266 | - - | - - | 1479 1818 | - - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ikkala, L.; Ronkanen, A.-K.; Ilmonen, J.; Similä, M.; Rehell, S.; Kumpula, T.; Päkkilä, L.; Klöve, B.; Marttila, H. Unmanned Aircraft System (UAS) Structure-From-Motion (SfM) for Monitoring the Changed Flow Paths and Wetness in Minerotrophic Peatland Restoration. Remote Sens. 2022, 14, 3169. https://doi.org/10.3390/rs14133169
Ikkala L, Ronkanen A-K, Ilmonen J, Similä M, Rehell S, Kumpula T, Päkkilä L, Klöve B, Marttila H. Unmanned Aircraft System (UAS) Structure-From-Motion (SfM) for Monitoring the Changed Flow Paths and Wetness in Minerotrophic Peatland Restoration. Remote Sensing. 2022; 14(13):3169. https://doi.org/10.3390/rs14133169
Chicago/Turabian StyleIkkala, Lauri, Anna-Kaisa Ronkanen, Jari Ilmonen, Maarit Similä, Sakari Rehell, Timo Kumpula, Lassi Päkkilä, Björn Klöve, and Hannu Marttila. 2022. "Unmanned Aircraft System (UAS) Structure-From-Motion (SfM) for Monitoring the Changed Flow Paths and Wetness in Minerotrophic Peatland Restoration" Remote Sensing 14, no. 13: 3169. https://doi.org/10.3390/rs14133169
APA StyleIkkala, L., Ronkanen, A.-K., Ilmonen, J., Similä, M., Rehell, S., Kumpula, T., Päkkilä, L., Klöve, B., & Marttila, H. (2022). Unmanned Aircraft System (UAS) Structure-From-Motion (SfM) for Monitoring the Changed Flow Paths and Wetness in Minerotrophic Peatland Restoration. Remote Sensing, 14(13), 3169. https://doi.org/10.3390/rs14133169