
An Adaptive Image Segmentation Method with Automatic Selection of Optimal Scale for Extracting Cropland Parcels in Smallholder Farming Systems





Abstract
:
1. Introduction
2. Study Area and Data
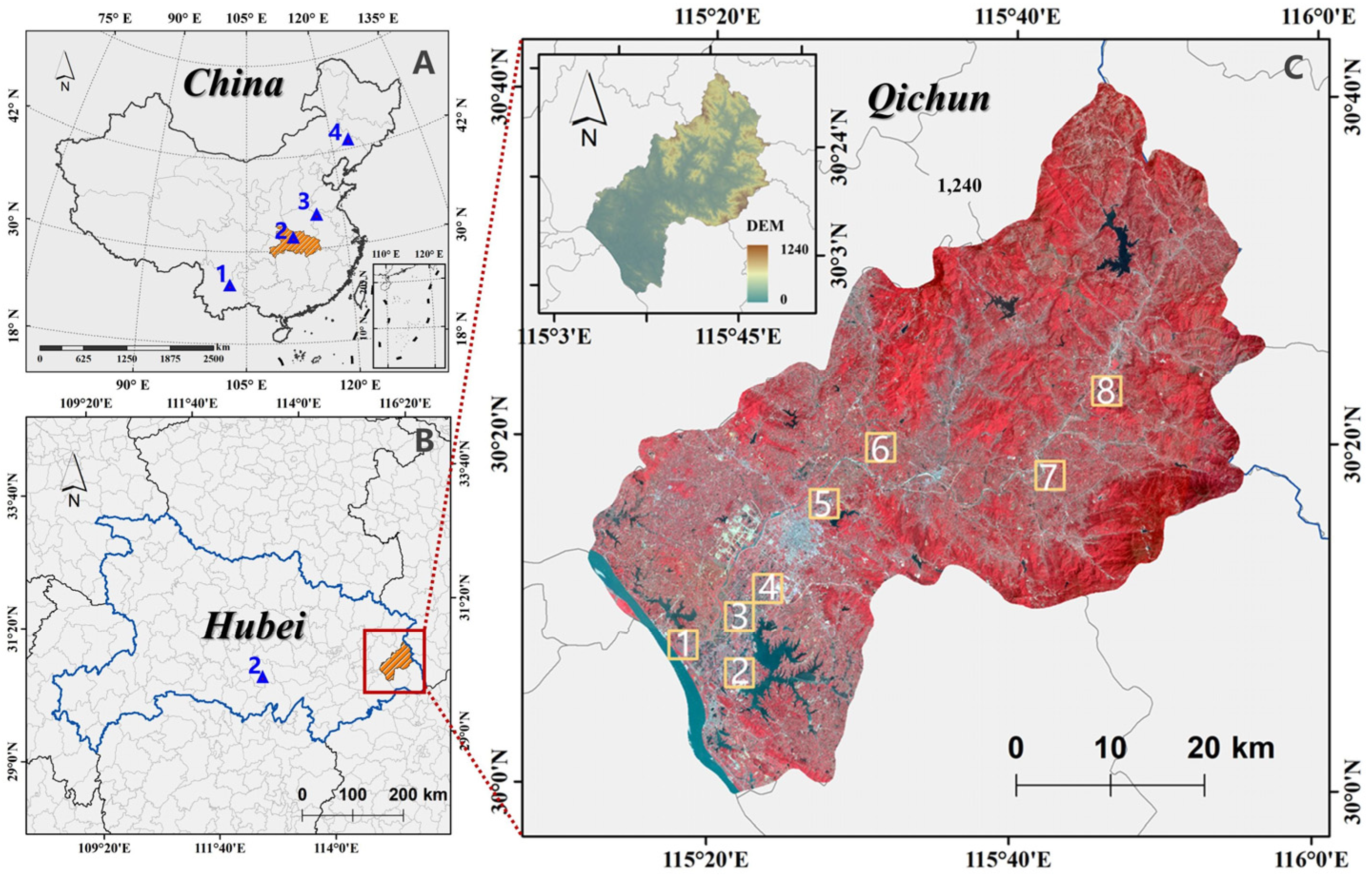
2.1. Study Area
2.2. Satellite Data
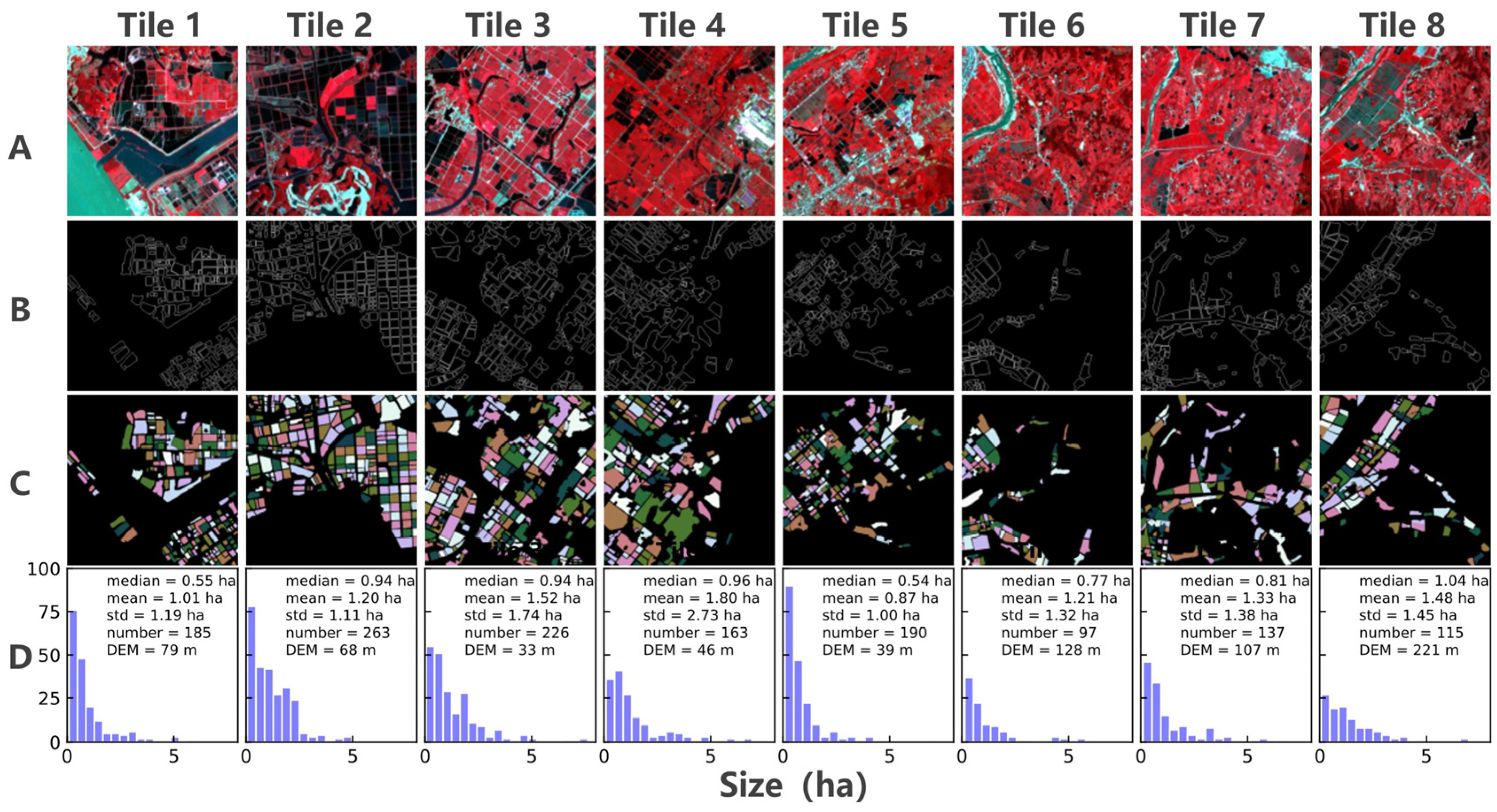
2.3. Test Tiles and Ground Truth Data
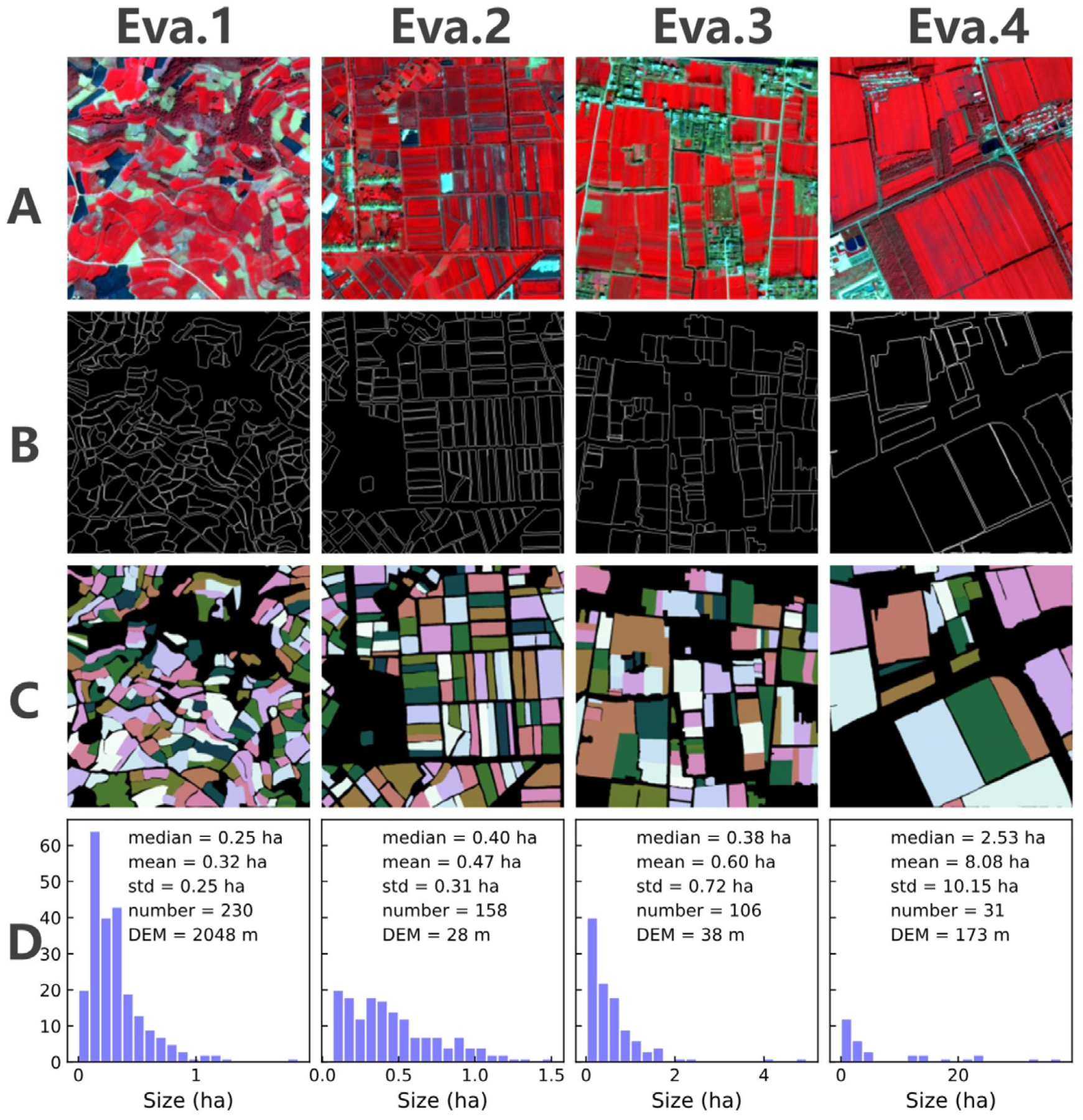
2.4. Data for Transferability Evaluation
3. Methodology
3.1. Calculation of Texture Features
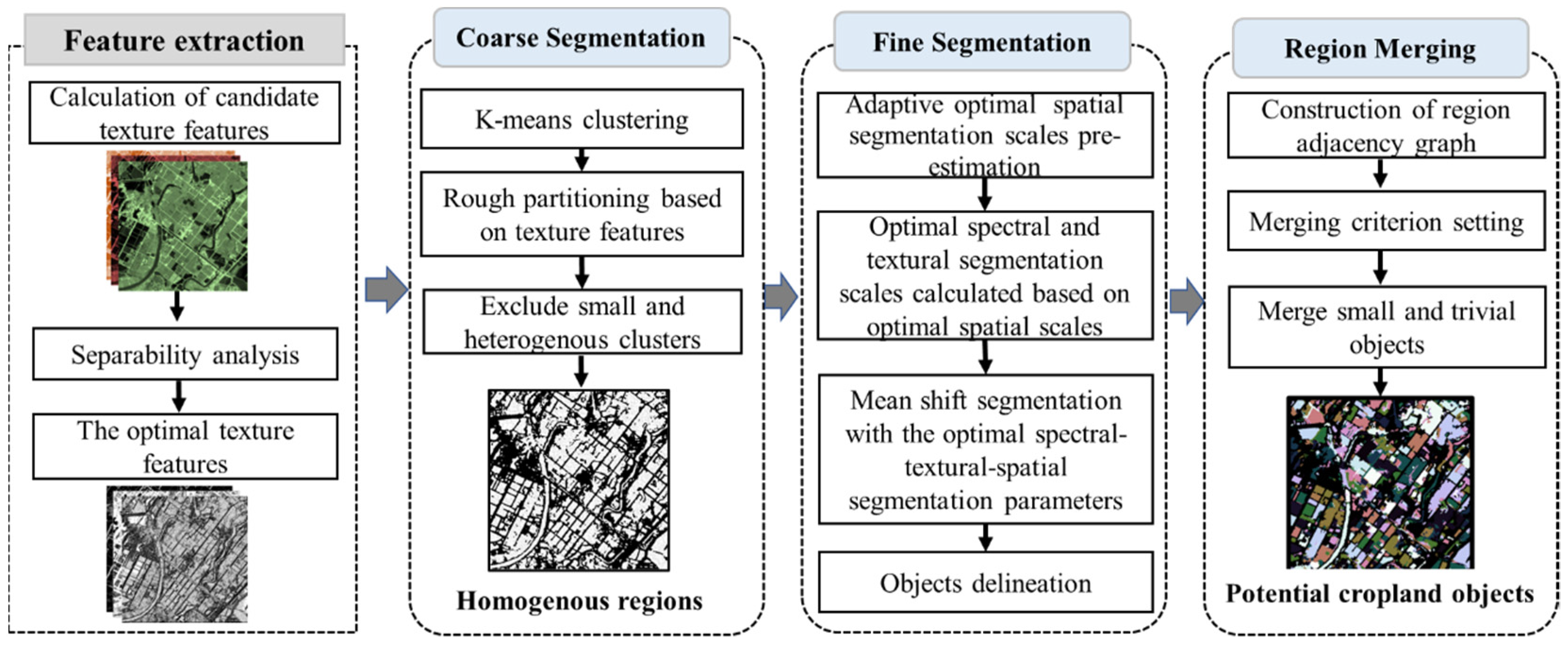
3.2. Image Segmentation by MSAOS
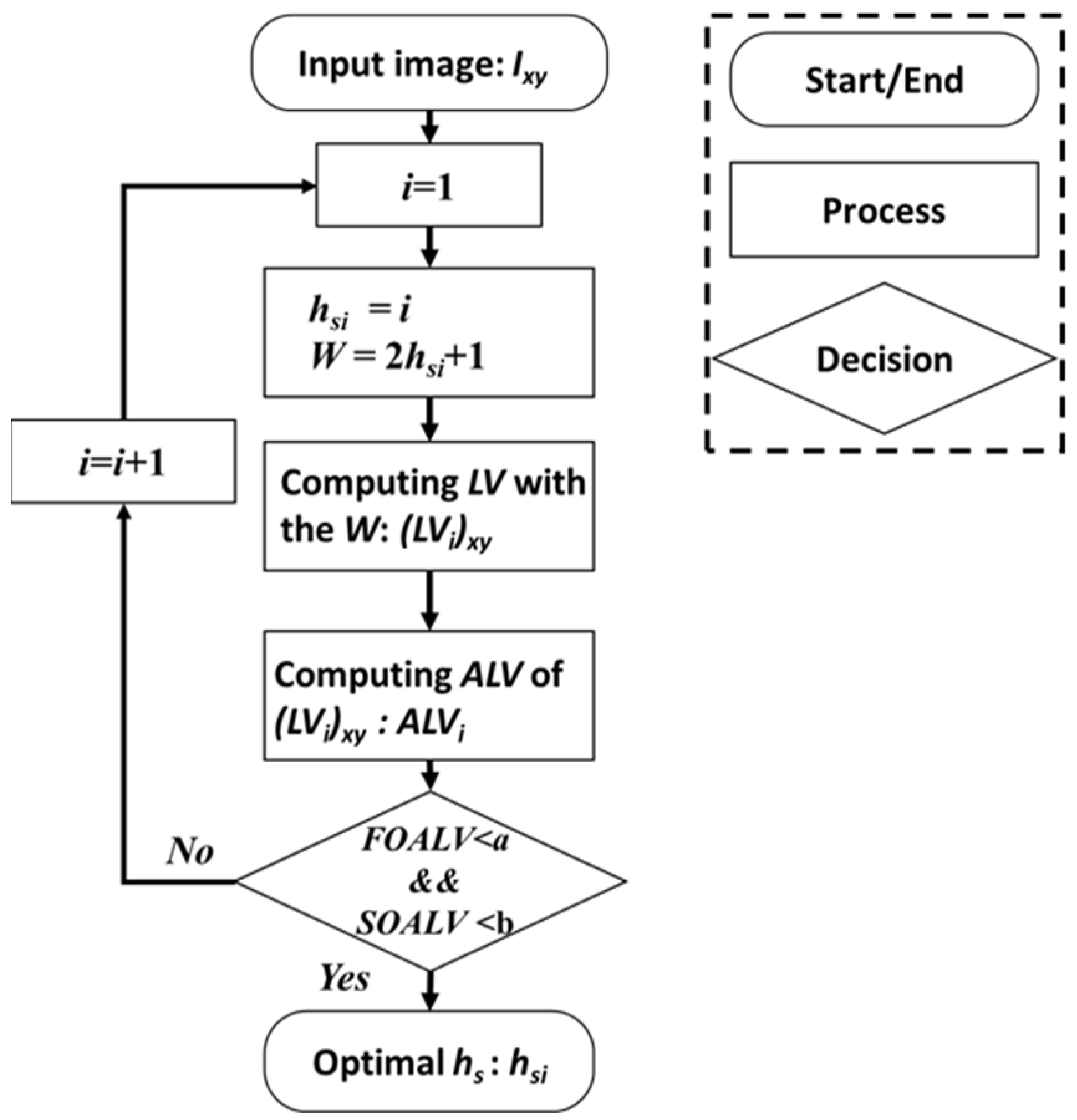
3.2.1. Coarse Segmentation
3.2.2. Fine Segmentation
3.2.3. Region Merging
3.3. Cropland Identification by Random Forest
3.4. Performance Evaluations
4. Results
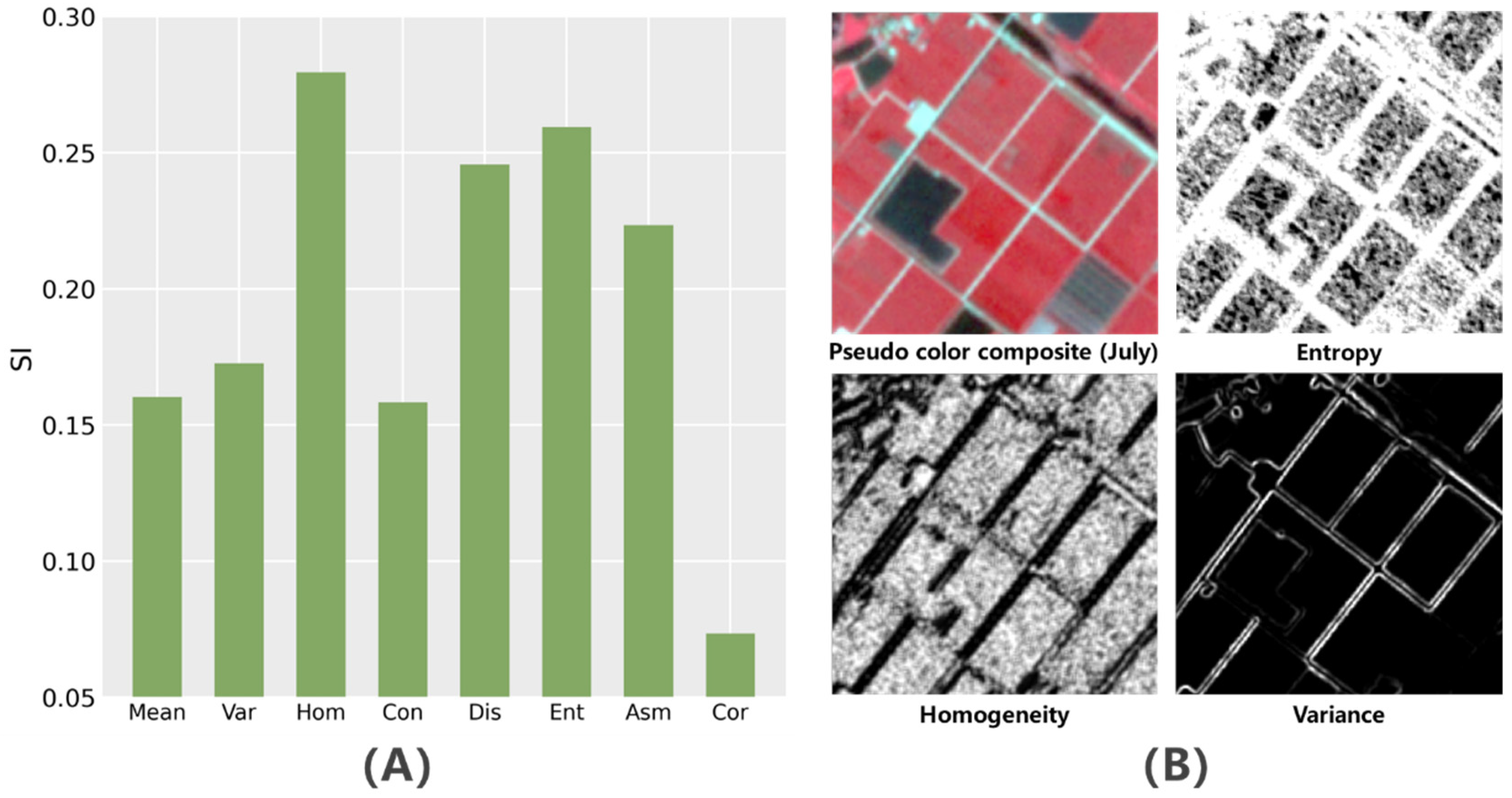
4.1. The Optimal Texture Features Selected for MSAOS
4.2. Maps of Extracted Cropland Parcels
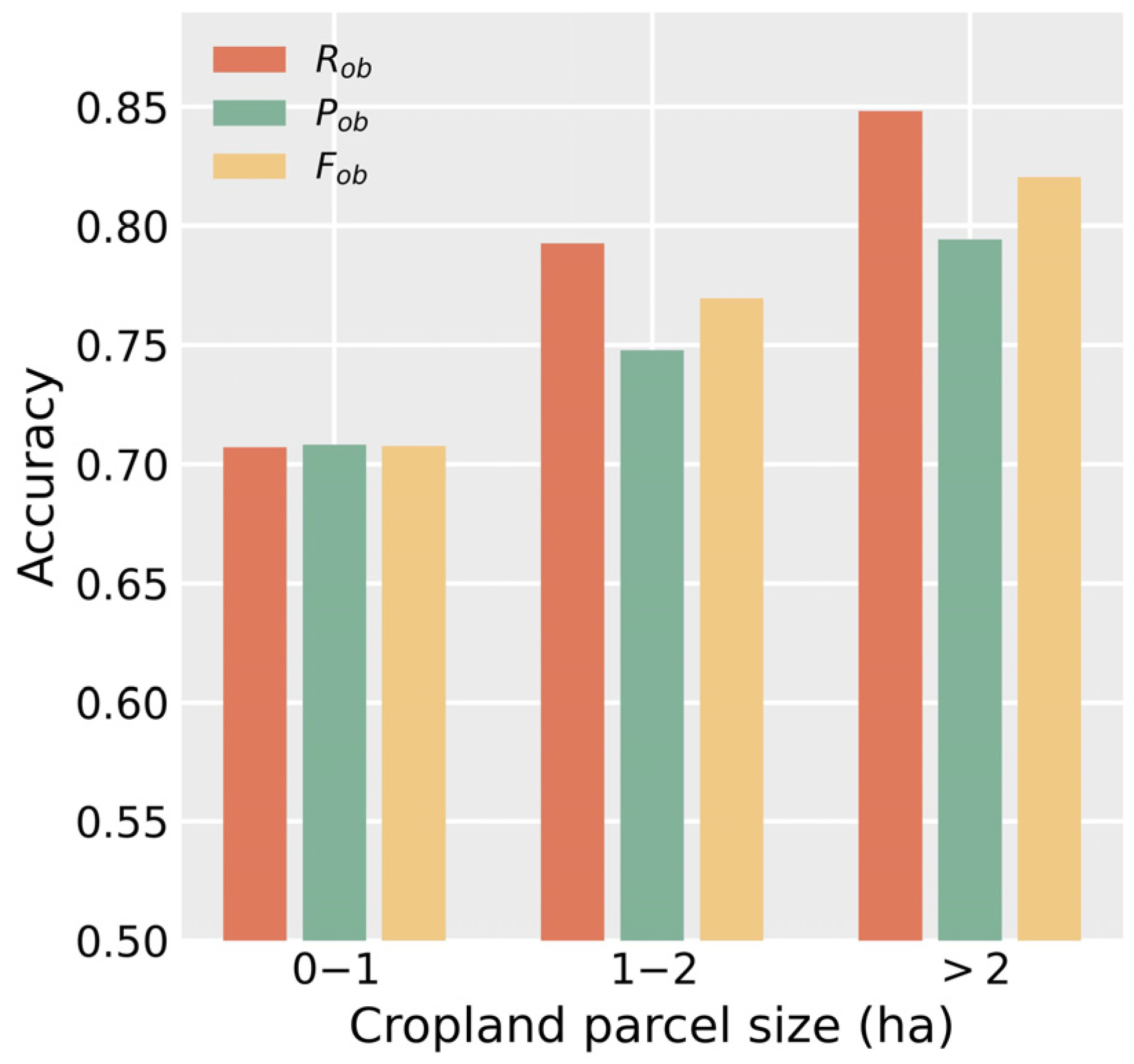
4.3. Accuracy Assessment of Extracted Cropland Parcels
4.4. Evaluating the Transferability of MSAOS to Other Regions
5. Discussion
5.1. Sensitivity of the Temporal Information Used for Cropland Parcels Extractions
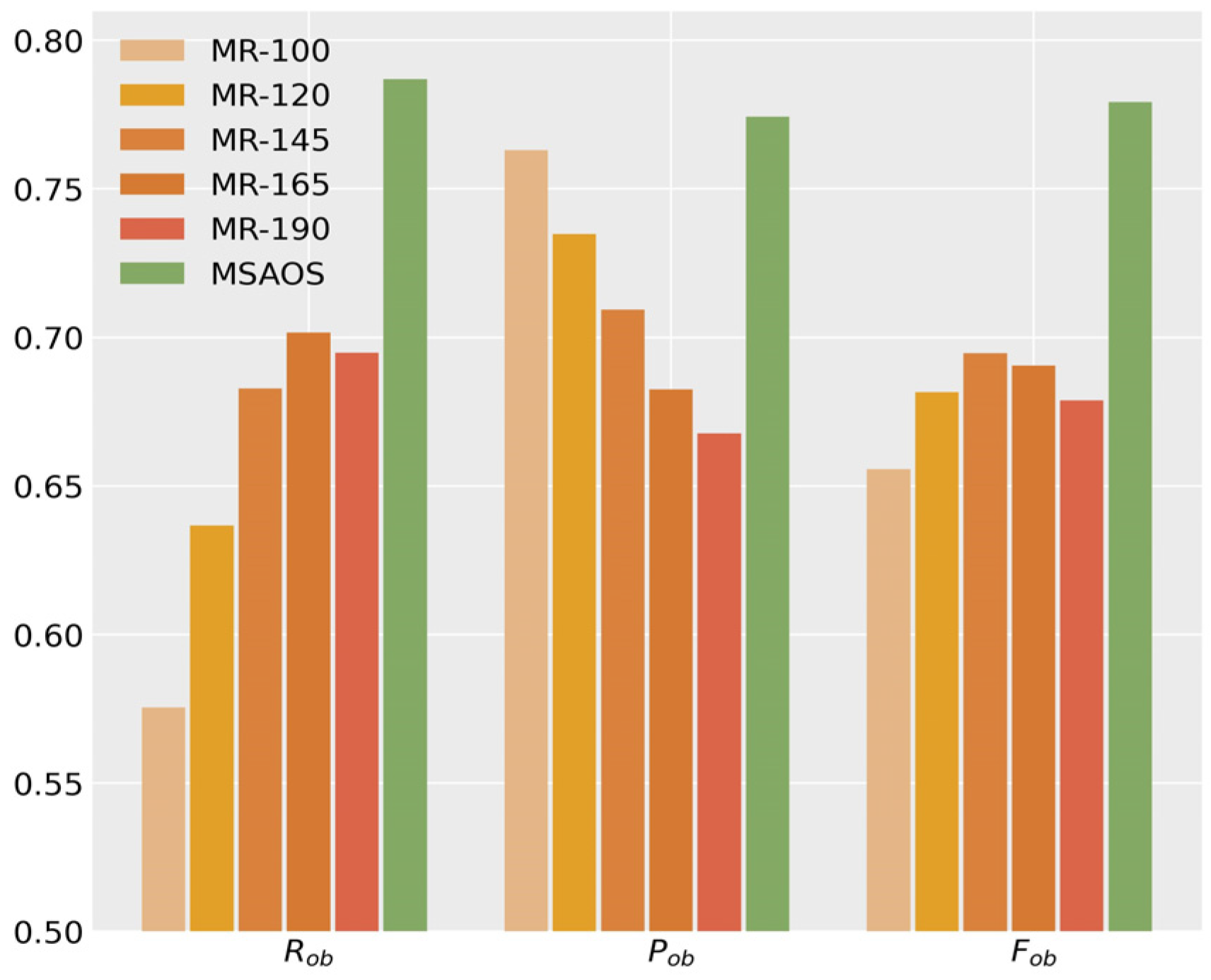
5.2. Comparison with Multi-Resolution Segmentation
5.3. Strengths and Potential Improvements
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, Y.; Huang, Q.; Wu, W.; Luo, J.; Gao, L.; Dong, W.; Wu, T.; Hu, X. Geo-Parcel Based Crop Identification by Integrating High Spatial-Temporal Resolution Imagery from Multi-Source Satellite Data. Remote Sens. 2017, 9, 1298. [Google Scholar] [CrossRef] [Green Version]
- Sitokonstantinou, V.; Papoutsis, I.; Kontoes, C.; Arnal, A.; Andrés, A.P.; Zurbano, J.A. Scalable Parcel-Based Crop Identification Scheme Using Sentinel-2 Data Time-Series for the Monitoring of the Common Agricultural Policy. Remote Sens. 2018, 10, 911. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Luo, J.; Xia, L.; Wu, T.; Gao, L.; Dong, W.; Hu, X.; Hai, Y. Geo-parcel-based crop classification in very-high-resolution images via hierarchical perception. Int. J. Remote Sens. 2019, 41, 1603–1624. [Google Scholar] [CrossRef]
- Dong, W.; Wu, T.; Luo, J.; Sun, Y.; Xia, L. Land parcel-based digital soil mapping of soil nutrient properties in an alluvial-diluvia plain agricultural area in China. Geoderma 2019, 340, 234–248. [Google Scholar] [CrossRef]
- Sheng, Y.; Ding, J.; Huang, J. The Relationship between Farm Size and Productivity in Agriculture: Evidence from Maize Production in Northern China. Am. J. Agr. Econ. 2019, 101, 790–806. [Google Scholar] [CrossRef]
- Kehoe, L.; Romero-Munoz, A.; Polaina, E.; Estes, L.; Kreft, H.; Kuemmerle, T. Biodiversity at risk under future cropland expansion and intensification. Nat. Ecol. Evol. 2017, 1, 1129–1135. [Google Scholar] [CrossRef]
- Rapsomanikis, G. The Economic Lives of Smallholder Farmers: An Analysis Based on Household Data from Nine Countries. Available online: http://www.fao.org/3/a-i5251e.pdf (accessed on 27 January 2022).
- Yan, L.; Roy, D.P. Conterminous United States crop field size quantification from multi-temporal Landsat data. Remote Sens. Environ. 2016, 172, 67–86. [Google Scholar] [CrossRef] [Green Version]
- Lobell, D.B.; Asner, G.P.; Ortiz-Monasterio, J.I.; Benning, T.L. Remote sensing of regional crop production in the Yaqui Valley, Mexico: Estimates and uncertainties. Agric. Ecosyst. Environ. 2003, 94, 205–220. [Google Scholar] [CrossRef] [Green Version]
- Yan, L.; Roy, D.P. Automated crop field extraction from multi-temporal Web Enabled Landsat Data. Remote Sens. Environ. 2014, 144, 42–64. [Google Scholar] [CrossRef] [Green Version]
- Graesser, J.; Ramankutty, N. Detection of cropland field parcels from Landsat imagery. Remote Sens. Environ. 2017, 201, 165–180. [Google Scholar] [CrossRef] [Green Version]
- Wagner, M.P.; Oppelt, N. Extracting Agricultural Fields from Remote Sensing Imagery Using Graph-Based Growing Contours. Remote Sens. 2020, 12, 1205. [Google Scholar] [CrossRef] [Green Version]
- Du, Z.; Yang, J.; Ou, C.; Zhang, T. Smallholder Crop Area Mapped with a Semantic Segmentation Deep Learning Method. Remote Sens. 2019, 11, 888. [Google Scholar] [CrossRef] [Green Version]
- Persello, C.; Tolpekin, V.A.; Bergado, J.R.; de By, R.A. Delineation of agricultural fields in smallholder farms from satellite images using fully convolutional networks and combinatorial grouping. Remote Sens. Environ. 2019, 231, 111253. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Pan, Y.; Zhang, J.; Hu, T.; Zhao, J.; Li, N.; Chen, Q. A generalized approach based on convolutional neural networks for large area cropland mapping at very high resolution. Remote Sens. Environ. 2020, 247, 111912. [Google Scholar] [CrossRef]
- Waldner, F.; Diakogiannis, F.I. Deep learning on edge: Extracting field boundaries from satellite images with a convolutional neural network. Remote Sens. Environ. 2020, 245, 111741. [Google Scholar] [CrossRef]
- Wagner, M.P.; Oppelt, N. Deep Learning and Adaptive Graph-Based Growing Contours for Agricultural Field Extraction. Remote Sens. 2020, 12, 1990. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, M.; Wang, Y.; Shang, J.; Liu, X.; Li, B.; Song, A.; Li, Q. Automated delineation of agricultural field boundaries from Sentinel-2 images using recurrent residual U-Net. Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102557. [Google Scholar] [CrossRef]
- Ma, L.; Cheng, L.; Li, M.; Liu, Y.; Ma, X. Training set size, scale, and features in Geographic Object-Based Image Analysis of very high resolution unmanned aerial vehicle imagery. ISPRS J. Photogramm. Remote Sens. 2015, 102, 14–27. [Google Scholar] [CrossRef]
- Belgiu, M.; Csillik, O. Sentinel-2 cropland mapping using pixel-based and object-based time-weighted dynamic time warping analysis. Remote Sens. Environ. 2018, 204, 509–523. [Google Scholar] [CrossRef]
- Johansen, K.; Lopez, O.; Tu, Y.-H.; Li, T.; McCabe, M.F. Center pivot field delineation and mapping: A satellite-driven object-based image analysis approach for national scale accounting. ISPRS J. Photogramm. Remote Sens. 2021, 175, 1–19. [Google Scholar] [CrossRef]
- Zhou, W.; Ming, D.; Xu, L.; Bao, H.; Wang, M. Stratified Object-Oriented Image Classification Based on Remote Sensing Image Scene Division. J. Spectrosc. 2018, 2018, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Ming, D.; Zhou, W.; Bao, H.; Chen, Y.; Ling, X. Farmland Extraction from High Spatial Resolution Remote Sensing Images Based on Stratified Scale Pre-Estimation. Remote Sens. 2019, 11, 108. [Google Scholar] [CrossRef] [Green Version]
- Cheng, T.; Ji, X.; Yang, G.; Zheng, H.; Ma, J.; Yao, X.; Zhu, Y.; Cao, W. DESTIN: A new method for delineating the boundaries of crop fields by fusing spatial and temporal information from WorldView and Planet satellite imagery. Comput. Electron. Agric. 2020, 178, 105787. [Google Scholar] [CrossRef]
- Witharana, C.; Bhuiyan, M.A.E.; Liljedahl, A.K.; Kanevskiy, M.; Jorgenson, T.; Jones, B.M.; Daanen, R.; Epstein, H.E.; Griffin, C.G.; Kent, K.; et al. An Object-Based Approach for Mapping Tundra Ice-Wedge Polygon Troughs from Very High Spatial Resolution Optical Satellite Imagery. Remote Sens. 2021, 13, 558. [Google Scholar] [CrossRef]
- Su, T.; Li, H.; Zhang, S.; Li, Y. Image segmentation using mean shift for extracting croplands from high-resolution remote sensing imagery. Remote Sens. Lett. 2015, 6, 952–961. [Google Scholar] [CrossRef]
- Li, D.; Zhang, G.; Wu, Z.; Yi, L. An edge embedded marker-based watershed algorithm for high spatial resolution remote sensing image segmentation. IEEE Trans. Image Process. 2010, 19, 2781–2787. [Google Scholar] [CrossRef]
- Chen, B.; Qiu, F.; Wu, B.; Du, H.J.R.S. Image segmentation based on constrained spectral variance difference and edge penalty. Remote Sens. 2015, 7, 5980–6004. [Google Scholar] [CrossRef] [Green Version]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Comaniciu, D.; Meer, P. Mean shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Zhang, L. An Adaptive Mean-Shift Analysis Approach for Object Extraction and Classification From Urban Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2008, 46, 4173–4185. [Google Scholar] [CrossRef]
- Ming, D.; Ci, T.; Cai, H.; Li, L.; Qiao, C.; Du, J. Semivariogram-Based Spatial Bandwidth Selection for Remote Sensing Image Segmentation With Mean-Shift Algorithm. IEEE Geosci. Remote Sens. Lett. 2012, 9, 813–817. [Google Scholar] [CrossRef]
- Ming, D.; Li, J.; Wang, J.; Zhang, M. Scale parameter selection by spatial statistics for GeOBIA: Using mean-shift based multi-scale segmentation as an example. ISPRS J. Photogramm. Remote Sens. 2015, 106, 28–41. [Google Scholar] [CrossRef]
- Lu, H.; Liu, C.; Li, N.; Fu, X.; Li, L. Optimal segmentation scale selection and evaluation of cultivated land objects based on high-resolution remote sensing images with spectral and texture features. Environ. Sci. Pollut. Res. Int. 2021, 28, 27067–27083. [Google Scholar] [CrossRef]
- Somers, B.; Asner, G.P. Multi-temporal hyperspectral mixture analysis and feature selection for invasive species mapping in rainforests. Remote Sens. Environ. 2013, 136, 14–27. [Google Scholar] [CrossRef]
- Zhou, H.; Li, X.; Schaefer, G.; Celebi, M.E.; Miller, P. Mean shift based gradient vector flow for image segmentation. Comput. Vis. Image Underst. 2013, 117, 1004–1016. [Google Scholar] [CrossRef] [Green Version]
- Lang, F.; Yang, J.; Yan, S.; Qin, F. Superpixel Segmentation of Polarimetric Synthetic Aperture Radar (SAR) Images Based on Generalized Mean Shift. Remote Sens. 2018, 10, 1592. [Google Scholar] [CrossRef] [Green Version]
- Fu, G.; Zhao, H.; Li, C.; Shi, L. Segmentation for High-Resolution Optical Remote Sensing Imagery Using Improved Quadtree and Region Adjacency Graph Technique. Remote Sens. 2013, 5, 3259–3279. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Ma, L.; Blaschke, T.; Cheng, L.; Tiede, D. A systematic comparison of different object-based classification techniques using high spatial resolution imagery in agricultural environments. Int. J. Appl. Earth Obs. Geoinf. 2016, 49, 87–98. [Google Scholar] [CrossRef]
- Immitzer, M.; Vuolo, F.; Atzberger, C. First Experience with Sentinel-2 Data for Crop and Tree Species Classifications in Central Europe. Remote Sens. 2016, 8, 166. [Google Scholar] [CrossRef]
- Breiman, L.J.M.l. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Immitzer, M.; Atzberger, C.; Koukal, T. Tree Species Classification with Random Forest Using Very High Spatial Resolution 8-Band WorldView-2 Satellite Data. Remote Sens. 2012, 4, 2661–2693. [Google Scholar] [CrossRef] [Green Version]
- Hu, Q.; Yin, H.; Friedl, M.A.; You, L.; Li, Z.; Tang, H.; Wu, W. Integrating coarse-resolution images and agricultural statistics to generate sub-pixel crop type maps and reconciled area estimates. Remote Sens. Environ. 2021, 258, 112365. [Google Scholar] [CrossRef]
- Zhang, X.; Feng, X.; Xiao, P.; He, G.; Zhu, L. Segmentation quality evaluation using region-based precision and recall measures for remote sensing images. ISPRS J. Photogramm. Remote Sens. 2015, 102, 73–84. [Google Scholar] [CrossRef]
- Waldner, F.; Canto, G.S.; Defourny, P. Automated annual cropland mapping using knowledge-based temporal features. ISPRS J. Photogramm. Remote Sens. 2015, 110, 1–13. [Google Scholar] [CrossRef]
- Xiong, J.; Thenkabail, P.; Tilton, J.; Gumma, M.; Teluguntla, P.; Oliphant, A.; Congalton, R.; Yadav, K.; Gorelick, N. Nominal 30-m Cropland Extent Map of Continental Africa by Integrating Pixel-Based and Object-Based Algorithms Using Sentinel-2 and Landsat-8 Data on Google Earth Engine. Remote Sens. 2017, 9, 1065. [Google Scholar] [CrossRef] [Green Version]
- Jozdani, S.E.; Momeni, M.; Johnson, B.A.; Sattari, M. A regression modelling approach for optimizing segmentation scale parameters to extract buildings of different sizes. Int. J. Remote Sens. 2017, 39, 684–703. [Google Scholar] [CrossRef]
- Wen, C.; Lu, M.; Bi, Y.; Zhang, S.; Xue, B.; Zhang, M.; Zhou, Q.; Wu, W. An Object-Based Genetic Programming Approach for Cropland Field Extraction. Remote Sens. 2022, 14, 1275. [Google Scholar] [CrossRef]
- Shen, Y.; Chen, J.; Xiao, L.; Pan, D. Optimizing multiscale segmentation with local spectral heterogeneity measure for high resolution remote sensing images. ISPRS J. Photogramm. Remote Sens. 2019, 157, 13–25. [Google Scholar] [CrossRef]
- Ming, D.; Zhang, X.; Wang, M.; Zhou, W. Cropland Extraction Based on OBIA and Adaptive Scale Pre-estimation. Photogramm. Eng. Remote Sens. 2016, 82, 635–644. [Google Scholar] [CrossRef]
- Trimble. eCognition Developer 9.0.1 Reference Book; Trimble Germany GmbH: Munich, Germany, 2014. [Google Scholar]
- Watkins, B.; van Niekerk, A. A comparison of object-based image analysis approaches for field boundary delineation using multi-temporal Sentinel-2 imagery. Comput. Electron. Agric. 2019, 158, 294–302. [Google Scholar] [CrossRef]
- Xu, L.; Ming, D.; Du, T.; Chen, Y.; Dong, D.; Zhou, C. Delineation of cultivated land parcels based on deep convolutional networks and geographical thematic scene division of remotely sensed images. Comput. Electron. Agric. 2022, 192, 106611. [Google Scholar] [CrossRef]
- Watkins, B.; Van Niekerk, A. Automating field boundary delineation with multi-temporal Sentinel-2 imagery. Comput. Electron. Agric. 2019, 167, 106611. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Name | Equation |
|---|---|
| Mean | |
| Variance (Var) | |
| Homogeneity (Hom) | |
| Contrast (Con) | |
| Dissimilarity (Dis) | |
| Entropy (Ent) | |
| Angular second moment (ASM) | |
| Correlation (Cor) |
| Feature Type | Feature Name | Equation or Explanation |
|---|---|---|
| Spectral features | NDVI | |
| VIgreen | ||
| EVI | ||
| Geometric features | Area | The area of the object. |
| Perimeter | The perimeter of the object. | |
| Shin | The shape index, computed as perimeter/(), the closer the shape index value of the object is to 1, the more regular the object is. | |
| Extent | Computed as the area divided by the area of the smallest rectangle containing the object. | |
| Minor axis length | Length of the minor axis of the ellipse that has the same normalized second central moment as the object. | |
| Major axis length | Length of the major axis of the ellipse that has the same normalized second central moment as the object. | |
| Orientation | Angle between the x-axis and the major axis of the ellipse that has the same second moment as the object. |
| Evaluation Methods | PS | PL | HIS | AVG | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Tile 1 | Tile 5 | Tile 2 | Tile 3 | Tile 4 | Tile 6 | Tile 7 | Tile 8 | |||
| Area-based evaluation | Rab | 0.786 | 0.795 | 0.834 | 0.864 | 0.886 | 0.806 | 0.813 | 0.881 | 0.833 |
| Pab | 0.798 | 0.817 | 0.935 | 0.888 | 0.829 | 0.844 | 0.806 | 0.851 | 0.846 | |
| Fab | 0.792 | 0.806 | 0.882 | 0.876 | 0.856 | 0.824 | 0.809 | 0.865 | 0.839 | |
| Object-based evaluation | Rob | 0.720 | 0.745 | 0.822 | 0.853 | 0.867 | 0.708 | 0.753 | 0.827 | 0.787 |
| Pob | 0.749 | 0.746 | 0.901 | 0.829 | 0.720 | 0.736 | 0.714 | 0.799 | 0.774 | |
| Fob | 0.734 | 0.745 | 0.860 | 0.841 | 0.786 | 0.722 | 0.737 | 0.813 | 0.779 | |
| Evaluation Methods | Eva.1 | Eva.2 | Eva.3 | Eva.4 | AVG | |
|---|---|---|---|---|---|---|
| Area-based evaluation | Pab | 0.931 | 0.936 | 0.993 | 0.975 | 0.959 |
| Rab | 0.666 | 0.711 | 0.803 | 0.938 | 0.780 | |
| Fab | 0.777 | 0.808 | 0.888 | 0.956 | 0.857 | |
| Object-based evaluation | Pob | 0.793 | 0.872 | 0.889 | 0.972 | 0.882 |
| Rob | 0.596 | 0.660 | 0.707 | 0.801 | 0.691 | |
| Fob | 0.681 | 0.751 | 0.788 | 0.878 | 0.775 | |
| Tile | Rab | Pab | Fab | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| SDN | SDG | MT | SDN | SDG | MT | SDN | SDG | MT | ||
| PS | Tile 1 | 0.514 | 0.725 | 0.786 | 0.584 | 0.766 | 0.798 | 0.547 | 0.745 | 0.792 |
| Tile 5 | 0.521 | 0.740 | 0.795 | 0.450 | 0.801 | 0.817 | 0.483 | 0.769 | 0.806 | |
| PL | Tile 2 | 0.693 | 0.807 | 0.834 | 0.715 | 0.912 | 0.935 | 0.704 | 0.856 | 0.882 |
| Tile 3 | 0.650 | 0.844 | 0.864 | 0.780 | 0.901 | 0.888 | 0.709 | 0.872 | 0.876 | |
| Tile 4 | 0.741 | 0.875 | 0.886 | 0.700 | 0.834 | 0.829 | 0.720 | 0.854 | 0.856 | |
| HIS | Tile 6 | 0.532 | 0.661 | 0.806 | 0.407 | 0.797 | 0.844 | 0.461 | 0.722 | 0.824 |
| Tile 7 | 0.601 | 0.711 | 0.813 | 0.642 | 0.737 | 0.806 | 0.621 | 0.724 | 0.809 | |
| Tile 8 | 0.723 | 0.872 | 0.881 | 0.666 | 0.837 | 0.851 | 0.693 | 0.854 | 0.865 | |
| AVG | 0.622 | 0.779 | 0.833 | 0.618 | 0.823 | 0.846 | 0.617 | 0.800 | 0.839 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, Z.; Hu, Q.; Zhang, X.; Yang, J.; Wei, H.; He, Z.; Song, Q.; Wang, C.; Yin, G.; Xu, B. An Adaptive Image Segmentation Method with Automatic Selection of Optimal Scale for Extracting Cropland Parcels in Smallholder Farming Systems. Remote Sens. 2022, 14, 3067. https://doi.org/10.3390/rs14133067
Cai Z, Hu Q, Zhang X, Yang J, Wei H, He Z, Song Q, Wang C, Yin G, Xu B. An Adaptive Image Segmentation Method with Automatic Selection of Optimal Scale for Extracting Cropland Parcels in Smallholder Farming Systems. Remote Sensing. 2022; 14(13):3067. https://doi.org/10.3390/rs14133067
Chicago/Turabian StyleCai, Zhiwen, Qiong Hu, Xinyu Zhang, Jingya Yang, Haodong Wei, Zhen He, Qian Song, Cong Wang, Gaofei Yin, and Baodong Xu. 2022. "An Adaptive Image Segmentation Method with Automatic Selection of Optimal Scale for Extracting Cropland Parcels in Smallholder Farming Systems" Remote Sensing 14, no. 13: 3067. https://doi.org/10.3390/rs14133067
APA StyleCai, Z., Hu, Q., Zhang, X., Yang, J., Wei, H., He, Z., Song, Q., Wang, C., Yin, G., & Xu, B. (2022). An Adaptive Image Segmentation Method with Automatic Selection of Optimal Scale for Extracting Cropland Parcels in Smallholder Farming Systems. Remote Sensing, 14(13), 3067. https://doi.org/10.3390/rs14133067