
A Two-Dimensional Variational Scheme for Merging Multiple Satellite Altimetry Data and Eddy Analysis

 ,
,  and
and 
Abstract
:1. Introduction
2. Method and Data Product
2.1. 2-DVar Method
2.2. 2-DVar Gridded Data and General Evaluation
2.3. Observing System Simulation Experiment
3. Eddy Characterization
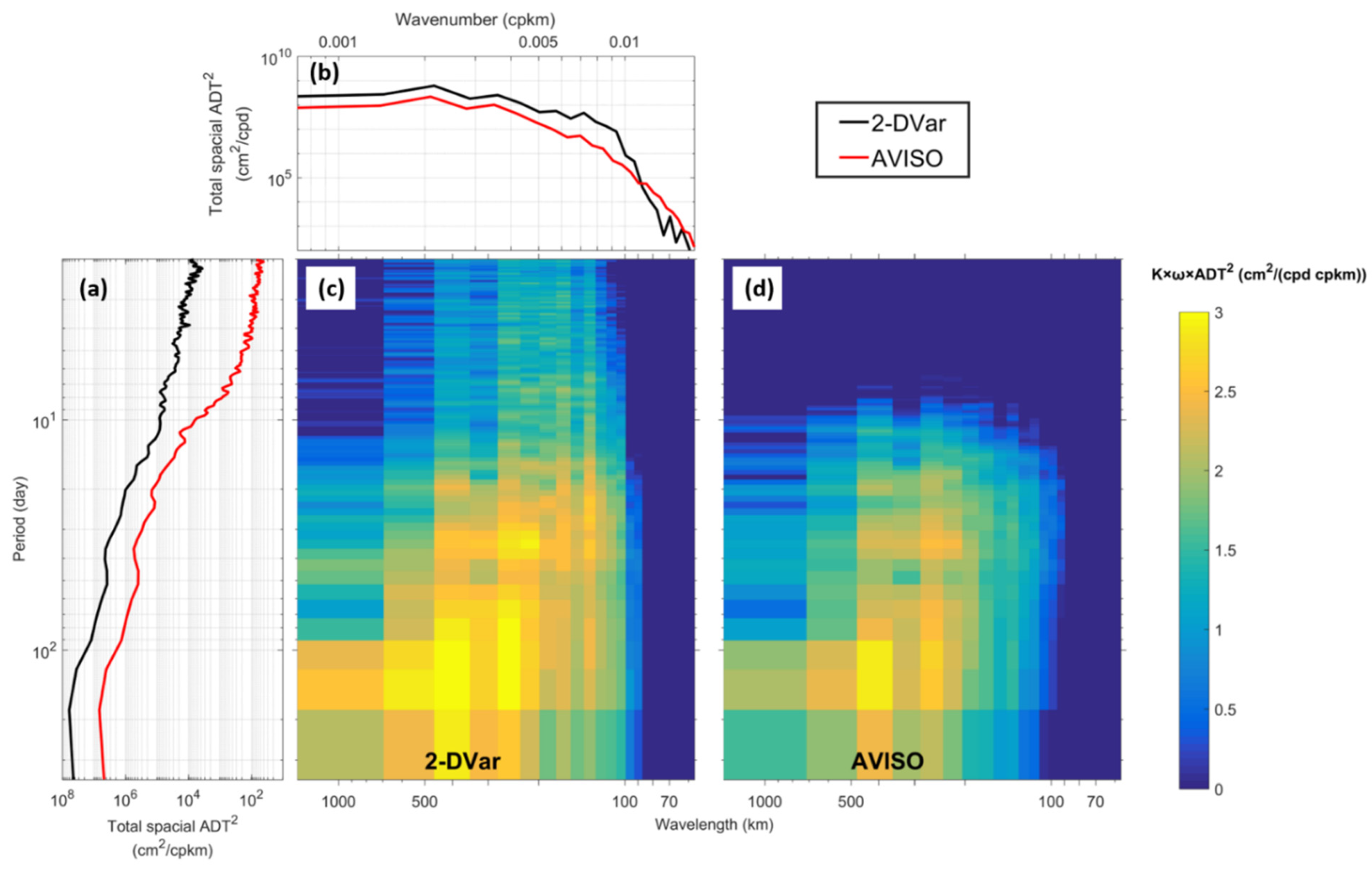
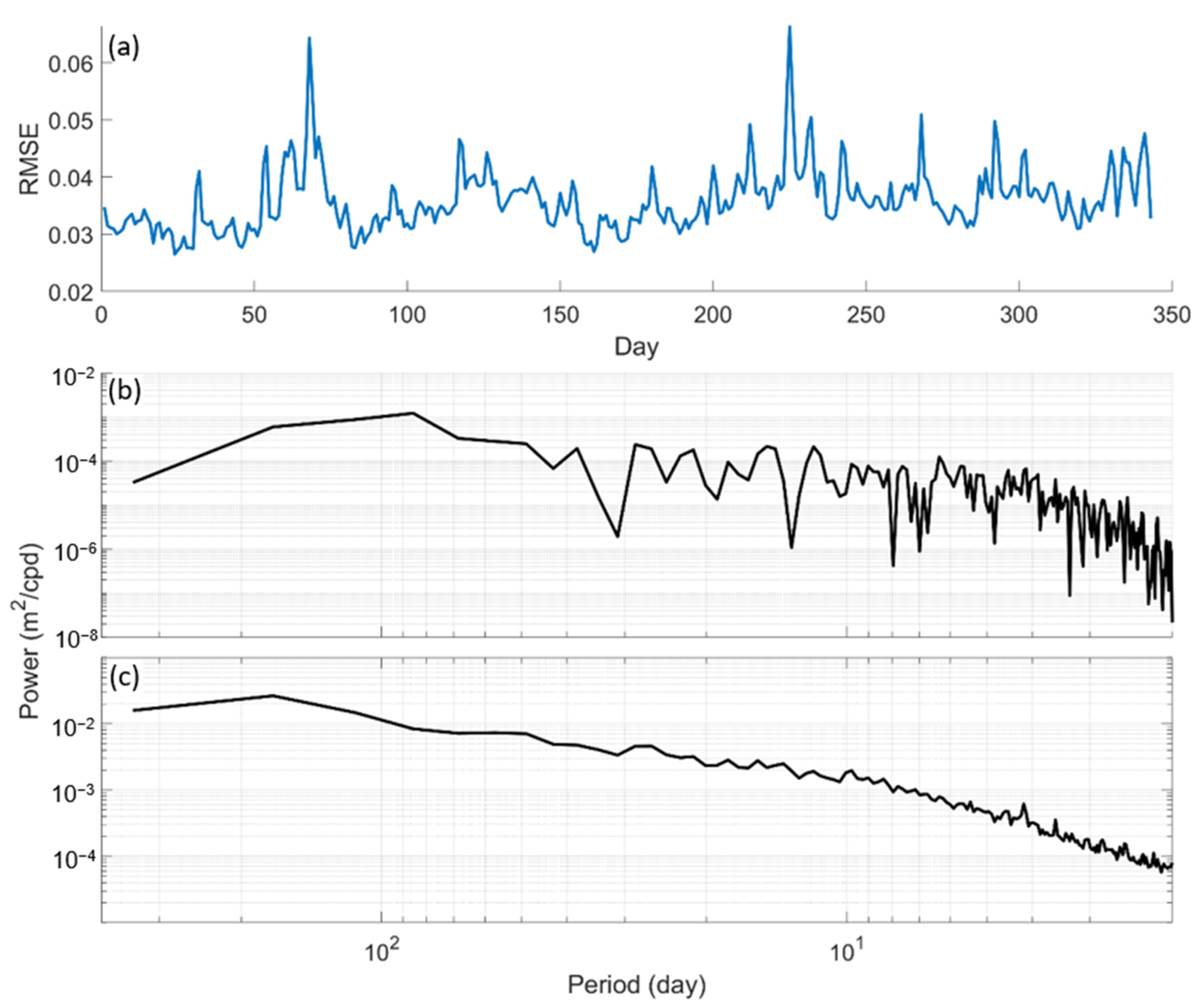
3.1. Wavenumber Frequency Spectrum Analysis
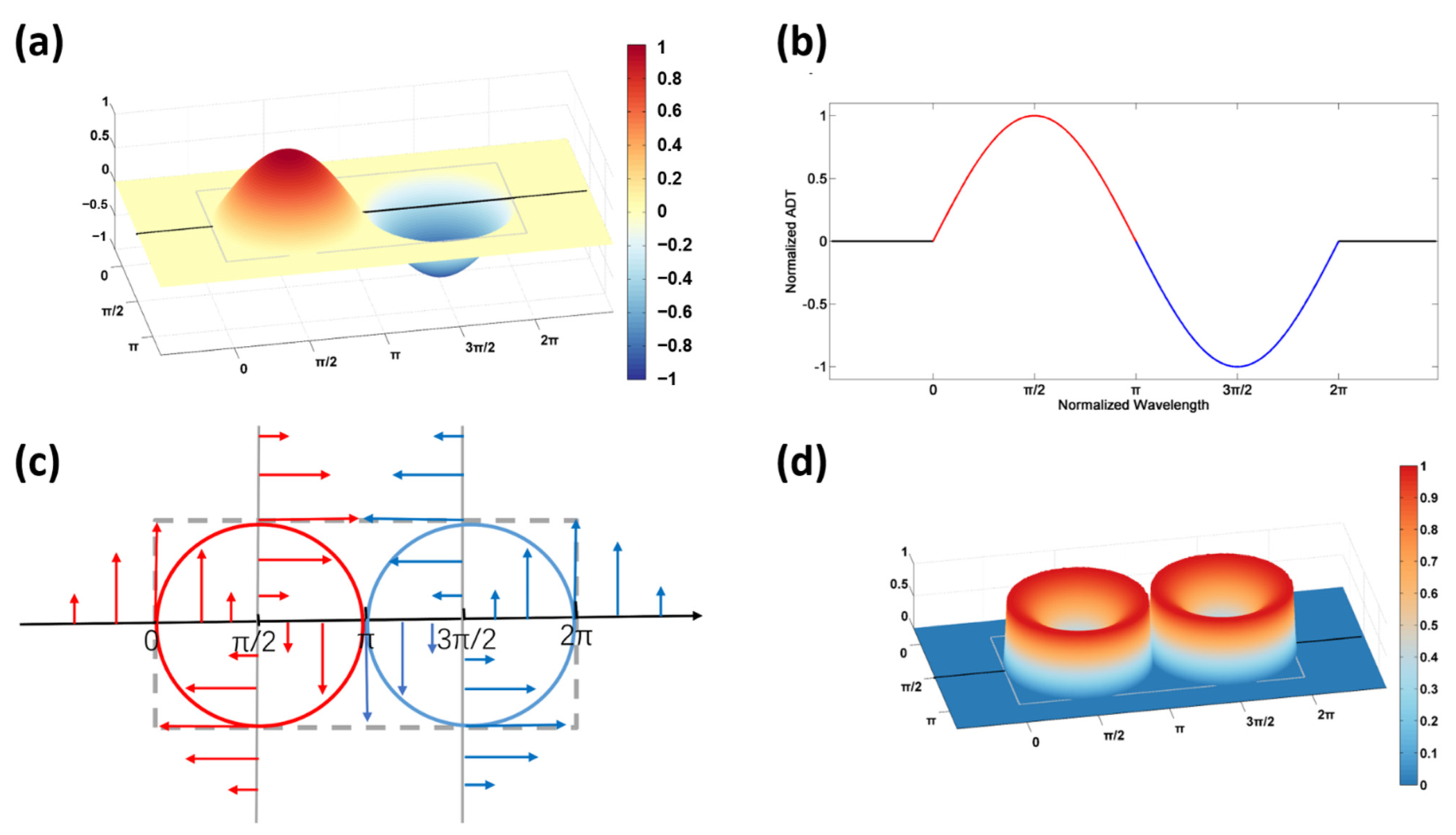
3.2. Eddy Structures
3.3. Eddy Detection
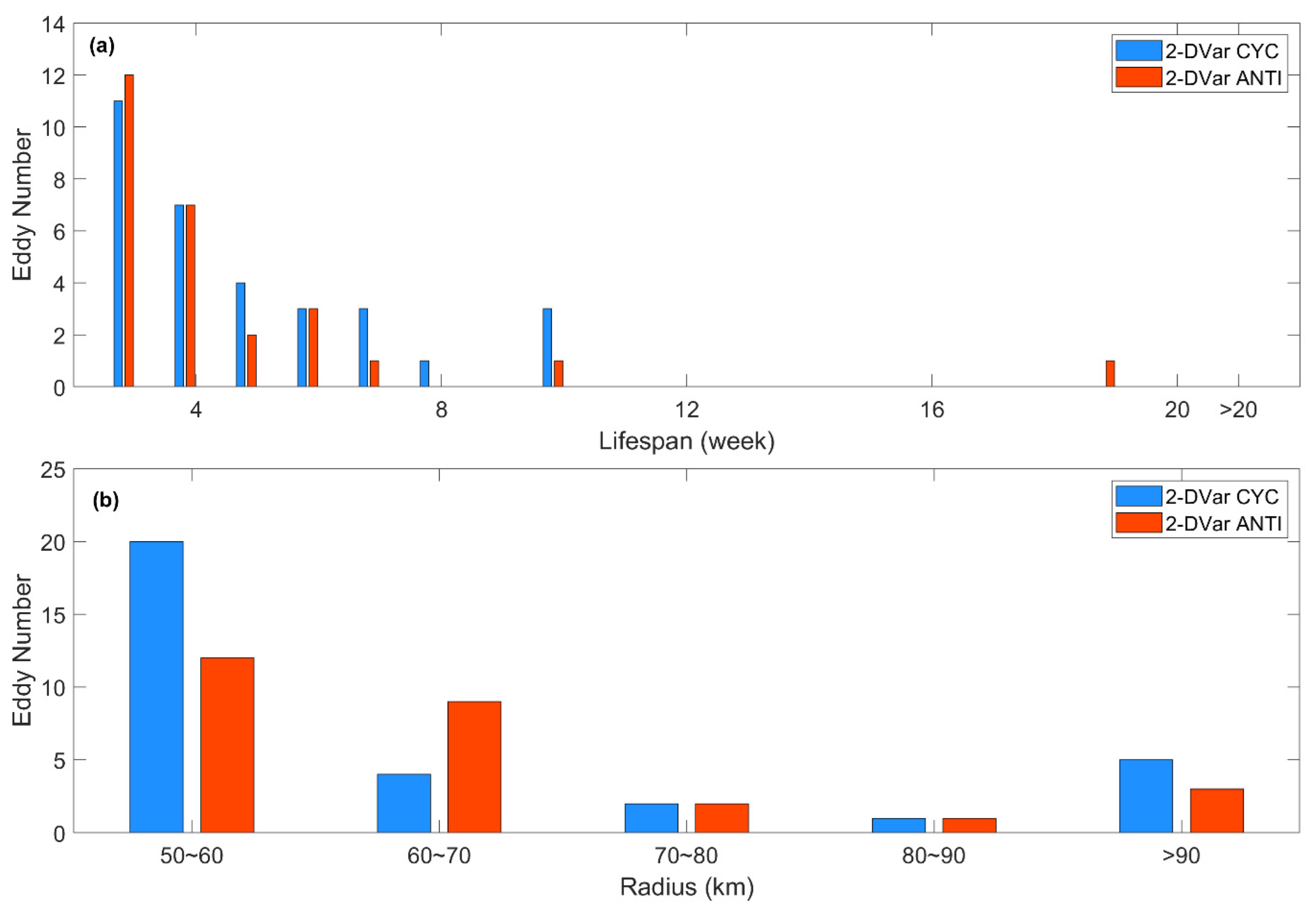
3.3.1. Effective Resolution and Eddy Size
3.3.2. Eddy Detection Evaluation
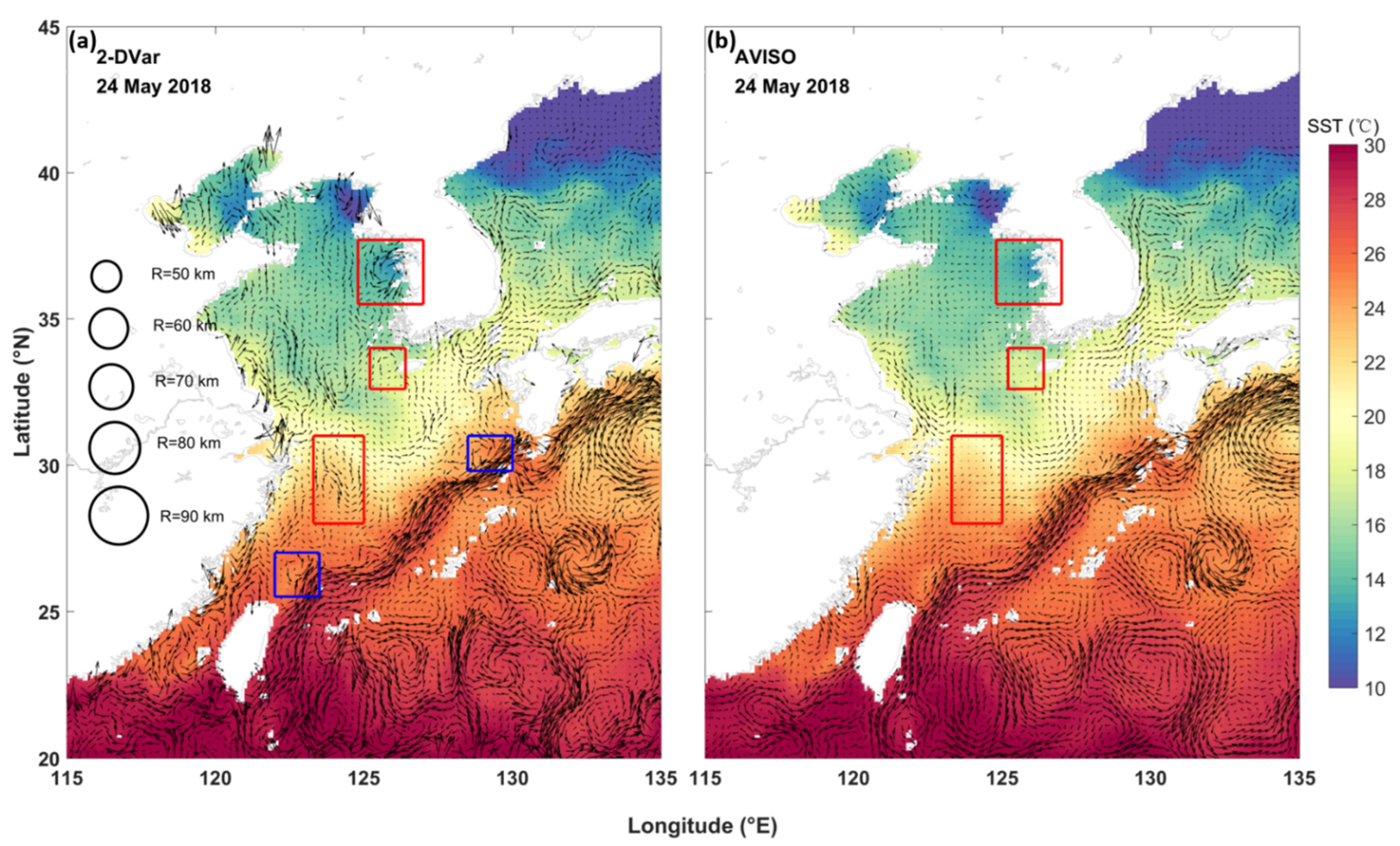
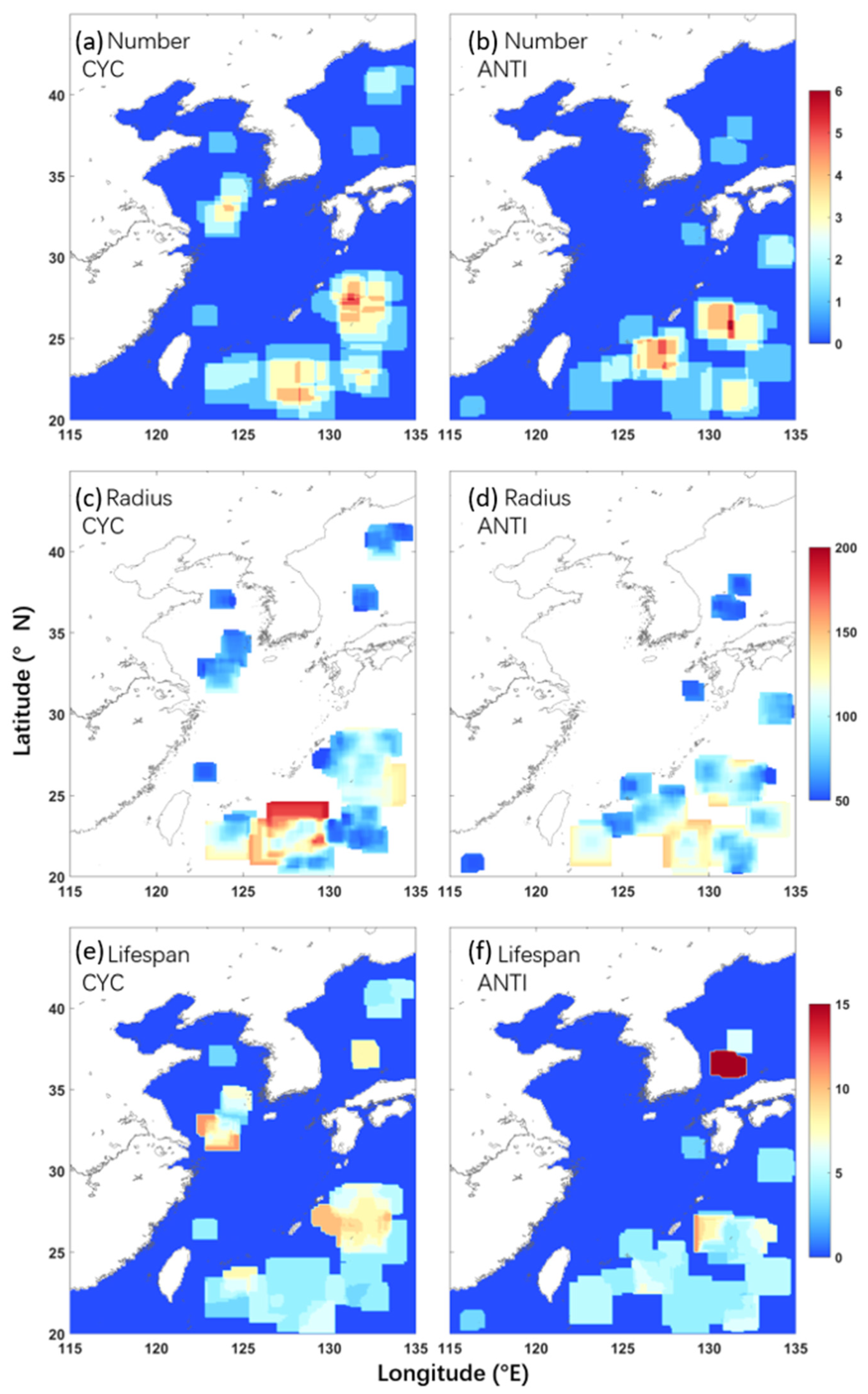
3.3.3. Eddy Detection in the ECS
4. Discussion and Conclusions
4.1. Discussion
4.2. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ducet, N.; Le Traon, P.Y.; Reverdin, G. Global high-resolution mapping of ocean circulation from TOPEX/Poseidon and ERS-1 and -2. J. Geophys. Res. Ocean. 2000, 105, 19477–19498. [Google Scholar] [CrossRef]
- Pujol, M.I.; Faugère, Y.; Taburet, G.; Dupuy, S.; Pelloquin, C.; Ablain, M.; Picot, N. Duacs dt2014: The new multi-mission altimeter data set reprocessed over 20 years. Ocean Sci. 2016, 12, 1067–1090. [Google Scholar] [CrossRef] [Green Version]
- Taburet, G.; Sanchez-Roman, A.; Ballarotta, M.; Pujol, M.I.; Legeais, J.F.; Fournier, F.; Faugere, Y.; Dibarboure, G. DUACS DT2018: 25 years of reprocessed sea level altimetry products. Ocean Sci. 2019, 15, 1207–1224. [Google Scholar] [CrossRef] [Green Version]
- Sangrà, P.; Pascual, A.; Rodríguez-Santana, Á.; Machín, F.; Mason, E.; McWilliams, J.C.; Pelegrí, J.L.; Dong, C.; Rubio, A.; Arístegui, J.; et al. The Canary Eddy Corridor: A major pathway for long-lived eddies in the subtropical North Atlantic. Deep Sea Res. Part I Oceanogr. Res. Pap. 2009, 56, 2100–2114. [Google Scholar] [CrossRef]
- Swart, N.C.; Ansorge, I.J.; Lutjeharms, J.R.E. Detailed characterization of a cold Antarctic eddy. J. Geophys. Res. Ocean. 2008, 113, C01009. [Google Scholar] [CrossRef]
- Nan, F.; Xue, H.; Xiu, P.; Chai, F.; Shi, M.; Guo, P. Oceanic eddy formation and propagation southwest of Taiwan. J. Geophys. Res. Ocean. 2011, 116, C12045. [Google Scholar] [CrossRef] [Green Version]
- Ansorge, I.J.; Lutjeharms, J.R.E. Eddies originating at the South-West Indian Ridge. J. Mar. Syst. 2003, 39, 1–18. [Google Scholar] [CrossRef]
- Cui, W.; Wang, W.; Zhang, J.; Yang, J. Multicore structures and the splitting and merging of eddies in global oceans from satellite altimeter data. Ocean Sci. 2019, 15, 413–430. [Google Scholar] [CrossRef] [Green Version]
- Xiu, P.; Chai, F.; Shi, L.; Xue, H.; Chao, Y. A census of eddy activities in the South China Sea during 1993–2007. J. Geophys. Res. Ocean. 2010, 115, C03012. [Google Scholar] [CrossRef] [Green Version]
- Chen, G.; Hou, Y.; Chu, X. Mesoscale eddies in the South China Sea: Mean properties, spatiotemporal variability, and impact on thermohaline structure. J. Geophys. Res. Ocean. 2011, 116, C06018. [Google Scholar] [CrossRef]
- Yang, G.; Yu, W.; Yuan, Y.; Zhao, X.; Wang, F.; Chen, G.; Liu, L.; Duan, Y. Characteristics, vertical structures, and heat/salt transports of mesoscale eddies in the southeastern tropical Indian Ocean. J. Geophys. Res. Ocean. 2015, 120, 6733–6750. [Google Scholar] [CrossRef]
- Zhang, C.; Li, H.; Liu, S.; Shao, L.; Zhao, Z.; Liu, H. Automatic detection of oceanic eddies in reanalyzed SST images and its application in the East China Sea. Sci. China Earth Sci. 2015, 58, 2249–2259. [Google Scholar] [CrossRef]
- Cui, W.; Yang, J.; Ma, Y. A statistical analysis of mesoscale eddies in the Bay of Bengal from 22–year altimetry data. Acta Oceanol. Sin. 2016, 35, 16–27. [Google Scholar] [CrossRef]
- Chelton, D.B.; Schlax, M.G.; Samelson, R.M. Global observations of nonlinear mesoscale eddies. Prog. Oceanogr. 2011, 91, 167–216. [Google Scholar] [CrossRef]
- Escudier, R.; Renault, L.; Pascual, A.; Brasseur, P.; Chelton, D.; Beuvier, J. Eddy properties in the Western Mediterranean Sea from satellite altimetry and a numerical simulation. J. Geophys. Res. Ocean. 2016, 121, 3990–4006. [Google Scholar] [CrossRef] [Green Version]
- Xu, C.; Shang, X.-D.; Huang, R.X. Horizontal eddy energy flux in the world oceans diagnosed from altimetry data. Sci. Rep. 2014, 4, 5316. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Q.; Sun, L.; Xu, C. The Lateral Eddy Viscosity Derived from the Decay of Oceanic Mesoscale Eddies. Open J. Mar. Sci. 2018, 08, 152–172. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Gan, J. Variability of the Kuroshio in the East China Sea derived from satellite altimetry data. Deep Sea Res. Part I Oceanogr. Res. Pap. 2012, 59, 25–36. [Google Scholar] [CrossRef]
- Hsin, Y.-C.; Qiu, B.; Chiang, T.-L.; Wu, C.-R. Seasonal to interannual variations in the intensity and central position of the surface Kuroshio east of Taiwan. J. Geophys. Res. Ocean. 2013, 118, 4305–4316. [Google Scholar] [CrossRef]
- Wu, C.-R.; Hsin, Y.-C.; Chiang, T.-L.; Lin, Y.-F.; Tsui, I.-F. Seasonal and interannual changes of the Kuroshio intrusion onto the East China Sea Shelf. J. Geophys. Res. Ocean. 2014, 119, 5039–5051. [Google Scholar] [CrossRef]
- Vélez-Belchí, P.; Centurioni, L.R.; Lee, D.-K.; Jan, S.; Niiler, P.P. Eddy induced Kuroshio intrusions onto the continental shelf of the East China Sea. J. Mar. Res. 2013, 71, 83–107. [Google Scholar] [CrossRef]
- Qiu, B.; Chen, S.; Wu, L.; Kida, S. Wind- versus Eddy-Forced Regional Sea Level Trends and Variability in the North Pacific Ocean. J. Clim. 2015, 28, 1561–1577. [Google Scholar] [CrossRef]
- Ding, R.; Huang, D.; Xuan, J.; Mayer, B.; Zhou, F.; Pohlmann, T. Cross-shelf water exchange in the East China Sea as estimated by satellite altimetry and in situ hydrographic measurement. J. Geophys. Res. Ocean. 2016, 121, 7192–7211. [Google Scholar] [CrossRef]
- Ballarotta, M.; Ubelmann, C.; Pujol, M.I.; Taburet, G.; Fournier, F.; Legeais, J.F.; Faugère, Y.; Delepoulle, A.; Chelton, D.; Dibarboure, G.; et al. On the resolutions of ocean altimetry maps. Ocean Sci. 2019, 15, 1091–1109. [Google Scholar] [CrossRef] [Green Version]
- Kuragano, T.; Kamachi, M. Global statistical space-time scales of oceanic variability estimated from the TOPEX/POSEIDON altimeter data. J. Geophys. Res. Ocean. 2000, 105, 955–974. [Google Scholar] [CrossRef]
- Kuragano, T.; Kamachi, M. Altimeter’s Capability of Reconstructing Realistic Eddy Fields Using Space-Time Optimum Interpolation. J. Oceanogr. 2003, 59, 765–781. [Google Scholar] [CrossRef]
- Liu, L.; Jiang, X.; Fei, J.; Li, Z. Development and evaluation of a new merged sea surface height product from multi-satellite altimeters. Chin. Sci. Bull. 2020, 65, 1888. [Google Scholar] [CrossRef]
- Li, Z.; Zuffada, C.; Lowe, S.T.; Lee, T.; Zlotnicki, V. Analysis of GNSS-R Altimetry for Mapping Ocean Mesoscale Sea Surface Heights Using High-Resolution Model Simulations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4631–4642. [Google Scholar] [CrossRef]
- Lorenc, A.C. Analysis methods for numerical weather prediction. Q. J. R. Meteorol. Soc. 1986, 112, 1177–1194. [Google Scholar] [CrossRef]
- Arhan, M.; De Verdiére, A.C. Dynamics of Eddy Motions in the Eastern North Atlantic. J. Phys. Oceanogr. 1985, 15, 153–170. [Google Scholar] [CrossRef] [Green Version]
- Le Guillou, F.; Metref, S.; Cosme, E.; Ubelmann, C.; Ballarotta, M.; Verron, J.; Le Sommer, J. Mapping altimetry in the forthcoming SWOT era by back-and-forth nudging a one-layer quasi-geostrophic model. J. Atmos. Ocean. Technol. 2020, 38, 697–710. [Google Scholar] [CrossRef]
- Large, W.G.; McWilliams, J.C.; Doney, S.C. Oceanic vertical mixing: A review and a model with a nonlocal boundary layer parameterization. Rev. Geophys. 1994, 32, 363. [Google Scholar] [CrossRef] [Green Version]
- Chapman, D.C. Numerical Treatment of Cross-Shelf Open Boundaries in a Barotropic Coastal Ocean Model. J. Phys. Oceanogr. 1985, 15, 1060–1075. [Google Scholar] [CrossRef] [Green Version]
- Orlanski, I. A simple boundary condition for unbounded hyperbolic flows. J. Comput. Phys. 1976, 21, 251–269. [Google Scholar] [CrossRef]
- Raymond, W.H.; Kuo, H.L. A radiation boundary condition for multi-dimensional flows. Q. J. R. Meteorol. Soc. 1984, 110, 535–551. [Google Scholar] [CrossRef]
- Savage, A.C.; Arbic, B.K.; Alford, M.H.; Ansong, J.K.; Farrar, J.T.; Menemenlis, D.; O’Rourke, A.K.; Richman, J.G.; Shriver, J.F.; Voet, G.; et al. Spectral decomposition of internal gravity wave sea surface height in global models. J. Geophys. Res. Ocean. 2017, 122, 7803–7821. [Google Scholar] [CrossRef]
- Torres, H.S.; Klein, P.; Menemenlis, D.; Qiu, B.; Su, Z.; Wang, J.; Chen, S.; Fu, L.-L. Partitioning Ocean Motions Into Balanced Motions and Internal Gravity Waves: A Modeling Study in Anticipation of Future Space Missions. J. Geophys. Res. Ocean. 2018, 123, 8084–8105. [Google Scholar] [CrossRef] [Green Version]
- Qiu, B.; Chen, S.; Klein, P.; Wang, J.; Torres, H.; Fu, L.-L.; Menemenlis, D. Seasonality in Transition Scale from Balanced to Unbalanced Motions in the World Ocean. J. Phys. Oceanogr. 2018, 48, 591–605. [Google Scholar] [CrossRef] [Green Version]
- Nencioli, F.; Dong, C.; Dickey, T.; Washburn, L.; McWilliams, J.C. A Vector Geometry–Based Eddy Detection Algorithm and Its Application to a High-Resolution Numerical Model Product and High-Frequency Radar Surface Velocities in the Southern California Bight. J. Atmos. Ocean. Technol. 2010, 27, 564–579. [Google Scholar] [CrossRef]
- Dong, C. Oceanic Eddy Detection and Analysis, 1st ed.; Science Press: Beijing, China, 2015; p. 326. [Google Scholar]
- Dong, C.; Jiang, X.; Xu, G.; Ji, J.; Lin, X.; Sun, W.; Wang, S. Automated Eddy Detection Using Geometric Approach, Eddy Datasets and Their Application. Adv. Mar. Sci. 2017, 35, 439–453. [Google Scholar]
- Yang, X.; Xu, G.; Liu, Y.; Sun, W.; Xia, C.; Dong, C. Multi-Source Data Analysis of Mesoscale Eddies and Their Effects on Surface Chlorophyll in the Bay of Bengal. Remote Sens. 2020, 12, 3485. [Google Scholar] [CrossRef]
- Liu, Y.; Dong, C.; Guan, Y.; Chen, D.; McWilliams, J.; Nencioli, F. Eddy analysis in the subtropical zonal band of the North Pacific Ocean. Deep Sea Res. Part I Oceanogr. Res. Pap. 2012, 68, 54–67. [Google Scholar] [CrossRef]
- Liu, Y.; Dong, C.; Liu, X.; Dong, J. Antisymmetry of oceanic eddies across the Kuroshio over a shelfbreak. Sci. Rep. 2017, 7, 6761. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Dong, C.; Chen, D.; Su, J. The pattern and variability of winter Kuroshio intrusion northeast of Taiwan. J. Geophys. Res. Ocean. 2014, 119, 5380–5394. [Google Scholar] [CrossRef]
- Liu, Z.; Gan, J.; Hu, J.; Wu, H.; Cai, Z.; Deng, Y. Progress of Studies on Circulation Dynamics in the East China Sea: The Kuroshio Exchanges With the Shelf Currents. Front. Mar. Sci. 2021, 8, 620910. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | RMSE (m) | Correlation | Useful Resolution (km) | Effective Resolution (km) |
|---|---|---|---|---|
| 3-Sat | 0.0726 | 0.9835 | 132 | 300 |
| 4-Sat | 0.0665 | 0.9862 | 126 | 255 |
| 2-DVar | 0.0364 | 0.9958 | 140 | 145 |
| AVISO | 0.0387 | 0.9953 | 210 | 175 |
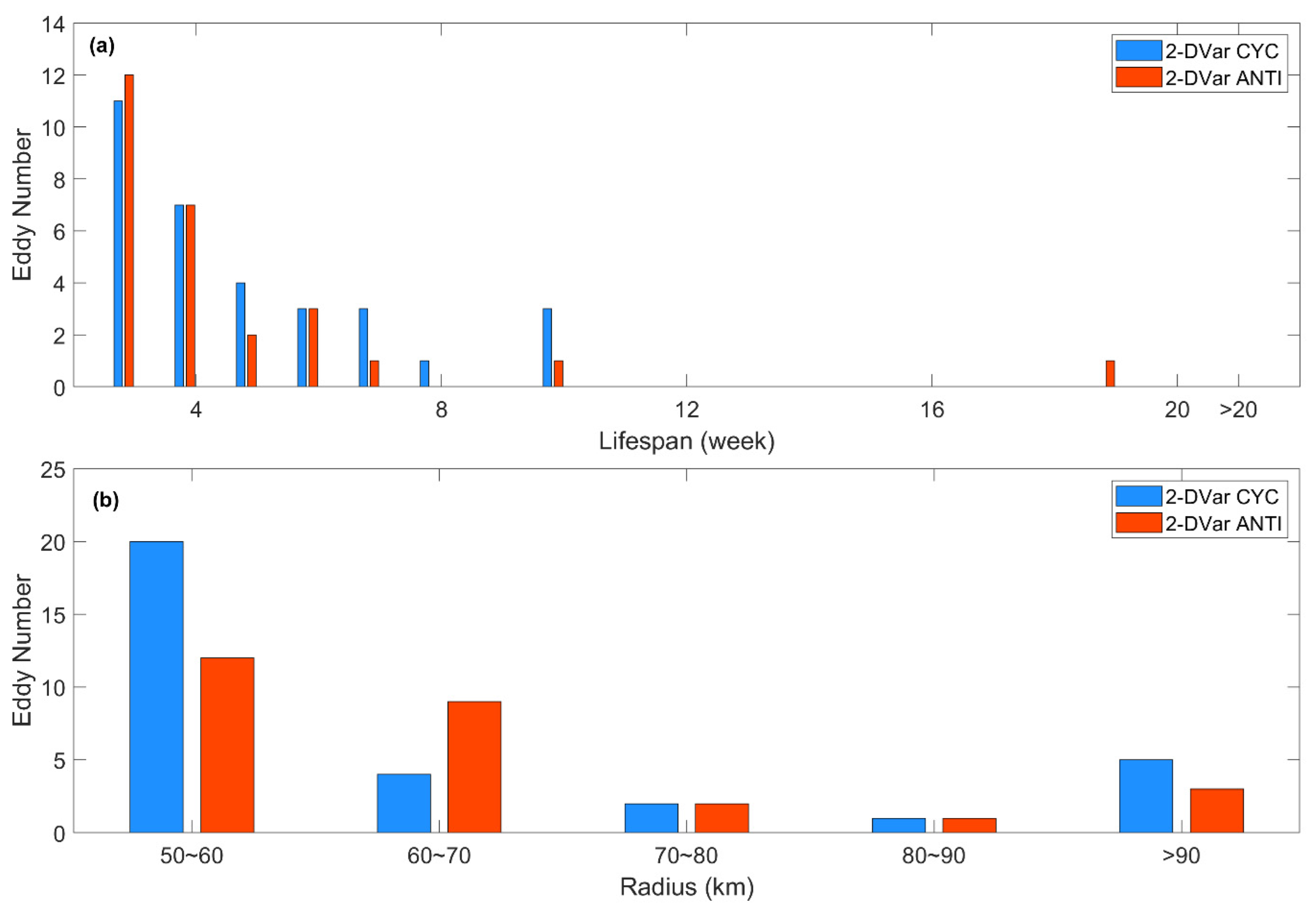
| Mean Radius (km) | CROCO Cyclonic Eddy | 2-DVar Cyclonic Eddy | CROCO Anticyclonic Eddy | 2-DVar Anticyclonic Eddy |
|---|---|---|---|---|
| 50–60 | 10 | 6 | 12 | 10 |
| 60–70 | 3 | 1 | 4 | 6 |
| 70–80 | 1 | 3 | 4 | 3 |
| 80–90 | 0 | 2 | 0 | 0 |
| >90 | 10 | 8 | 1 | 1 |
| Sum | 24 | 19 | 21 | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, X.; Liu, L.; Li, Z.; Liu, L.; Lim Kam Sian, K.T.C.; Dong, C. A Two-Dimensional Variational Scheme for Merging Multiple Satellite Altimetry Data and Eddy Analysis. Remote Sens. 2022, 14, 3026. https://doi.org/10.3390/rs14133026
Jiang X, Liu L, Li Z, Liu L, Lim Kam Sian KTC, Dong C. A Two-Dimensional Variational Scheme for Merging Multiple Satellite Altimetry Data and Eddy Analysis. Remote Sensing. 2022; 14(13):3026. https://doi.org/10.3390/rs14133026
Chicago/Turabian StyleJiang, Xingliang, Lei Liu, Zhijin Li, Lingxiao Liu, Kenny T. C. Lim Kam Sian, and Changming Dong. 2022. "A Two-Dimensional Variational Scheme for Merging Multiple Satellite Altimetry Data and Eddy Analysis" Remote Sensing 14, no. 13: 3026. https://doi.org/10.3390/rs14133026
APA StyleJiang, X., Liu, L., Li, Z., Liu, L., Lim Kam Sian, K. T. C., & Dong, C. (2022). A Two-Dimensional Variational Scheme for Merging Multiple Satellite Altimetry Data and Eddy Analysis. Remote Sensing, 14(13), 3026. https://doi.org/10.3390/rs14133026