
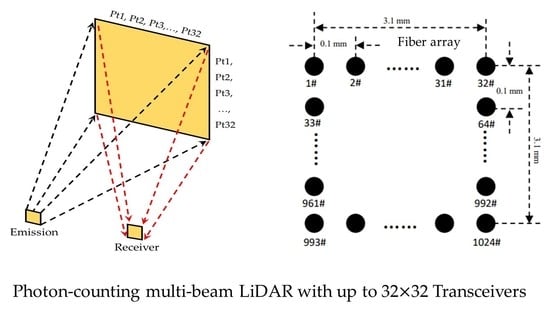
Design and Demonstration of a Novel Long-Range Photon-Counting 3D Imaging LiDAR with 32 × 32 Transceivers

 , , and
, , and
Abstract
:
1. Introduction
2. Instrument Description
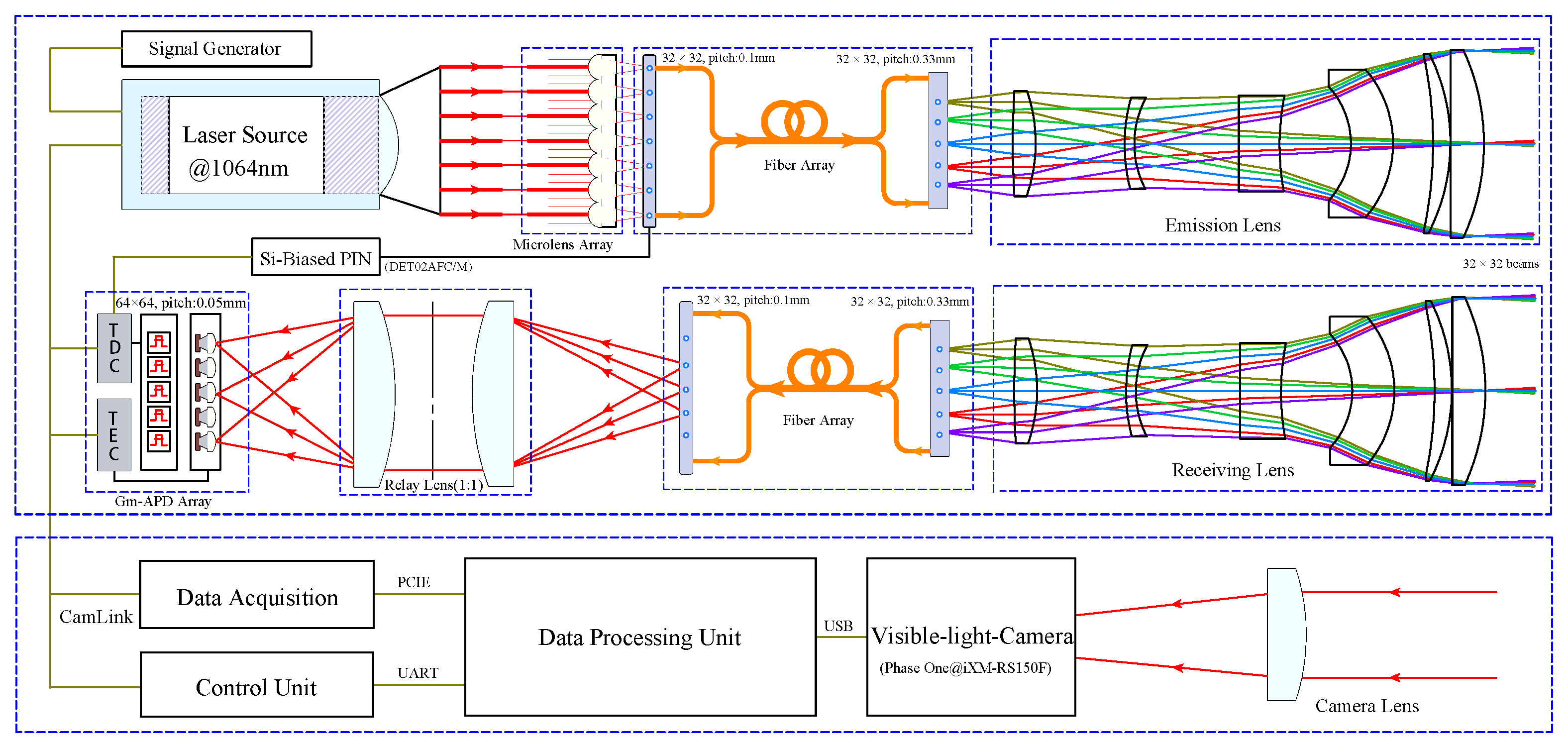
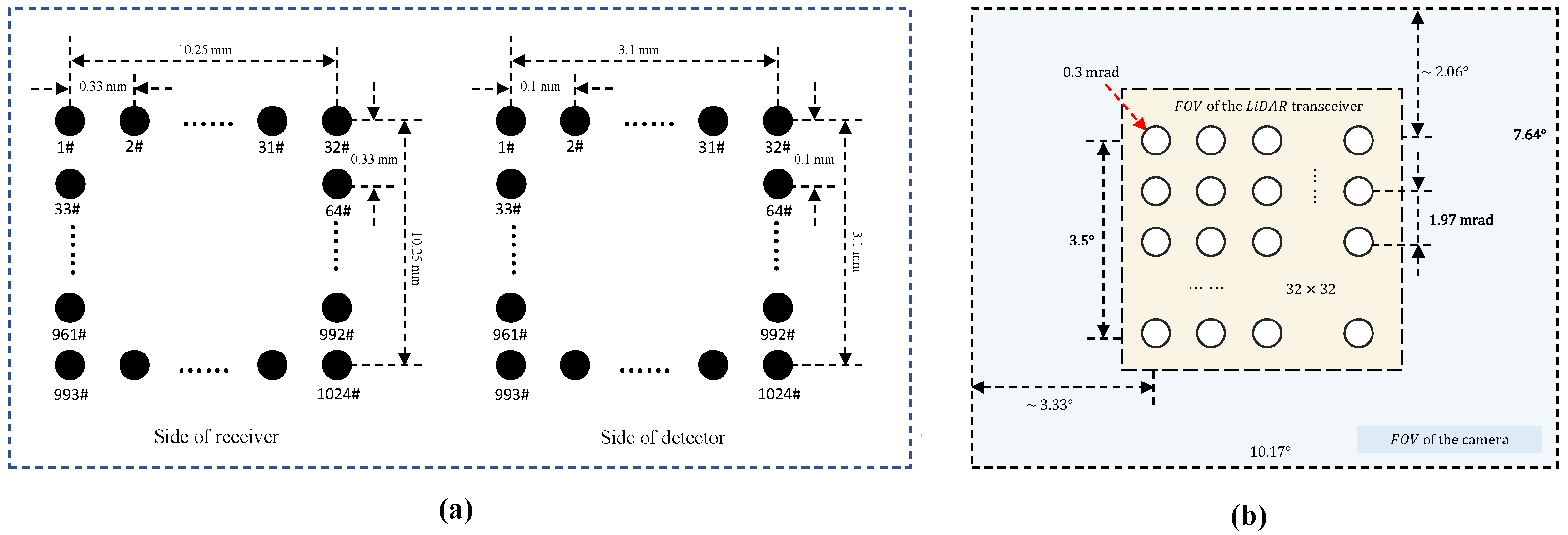
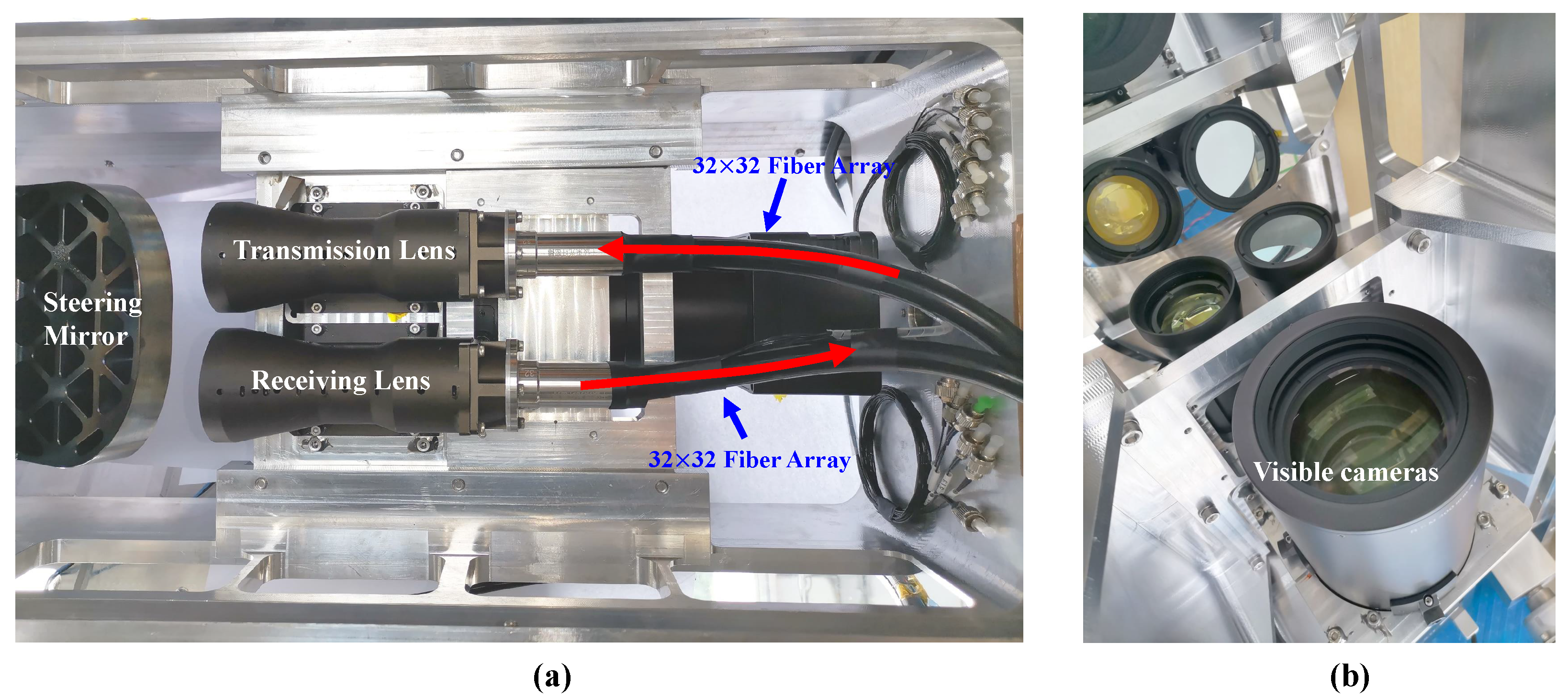
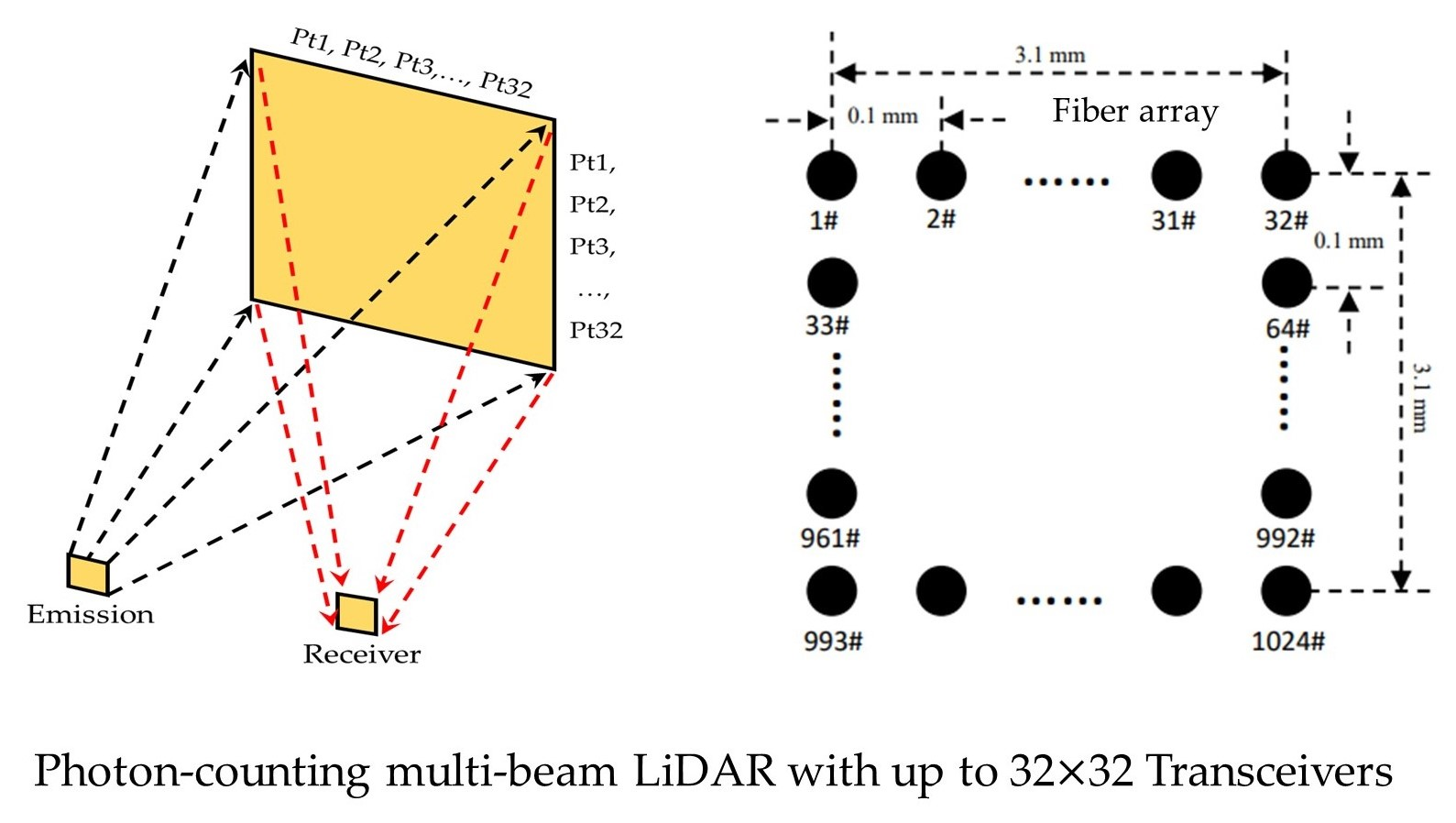
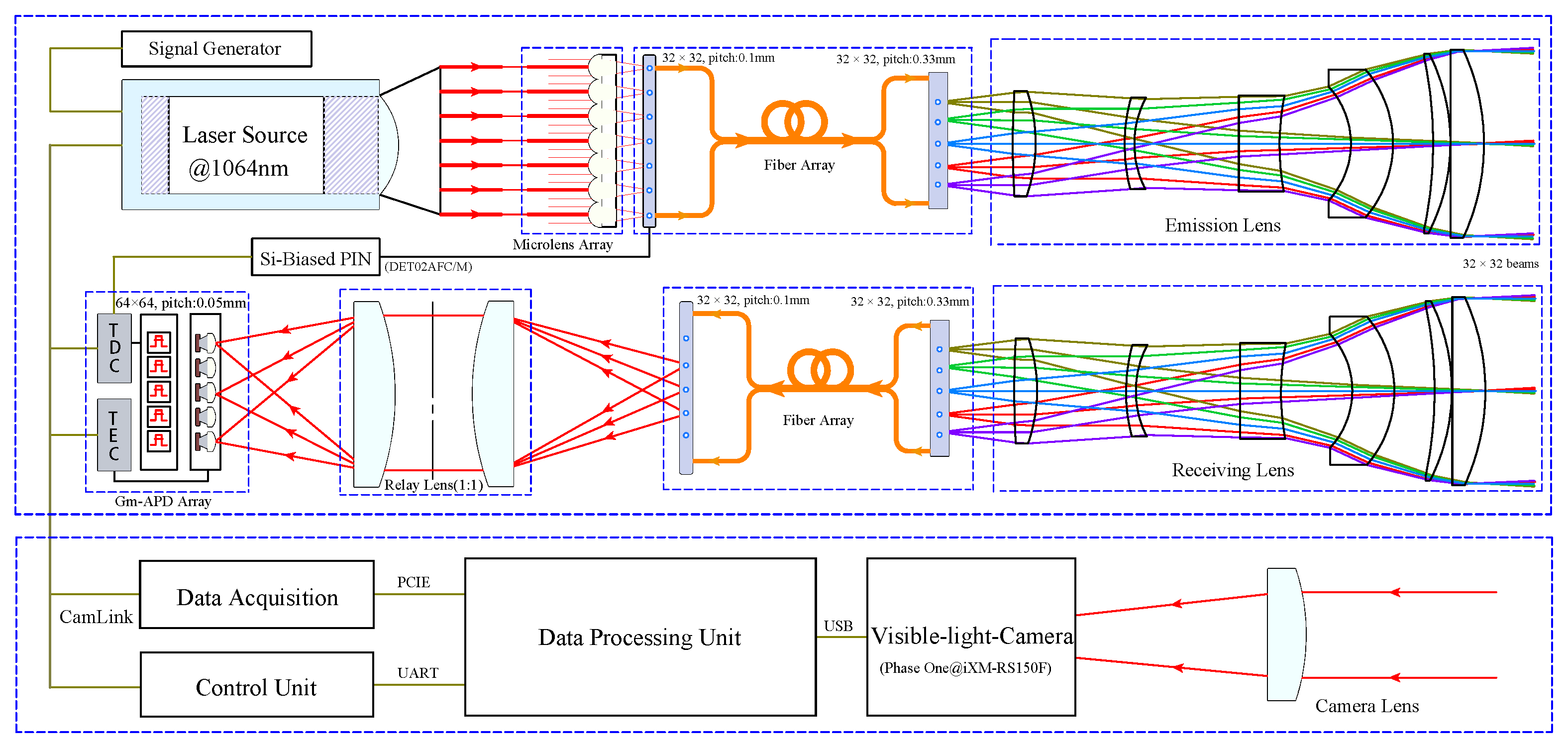
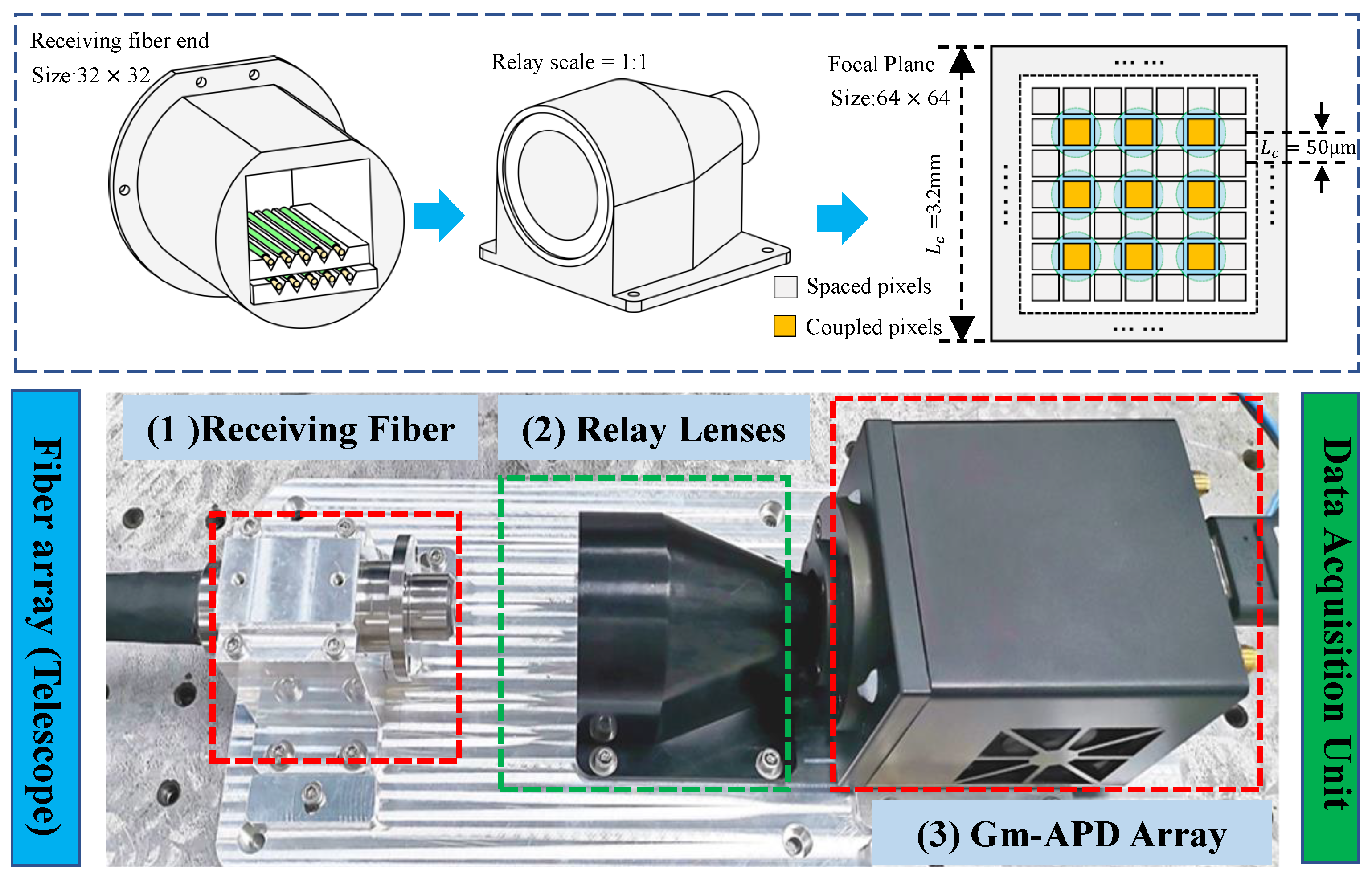
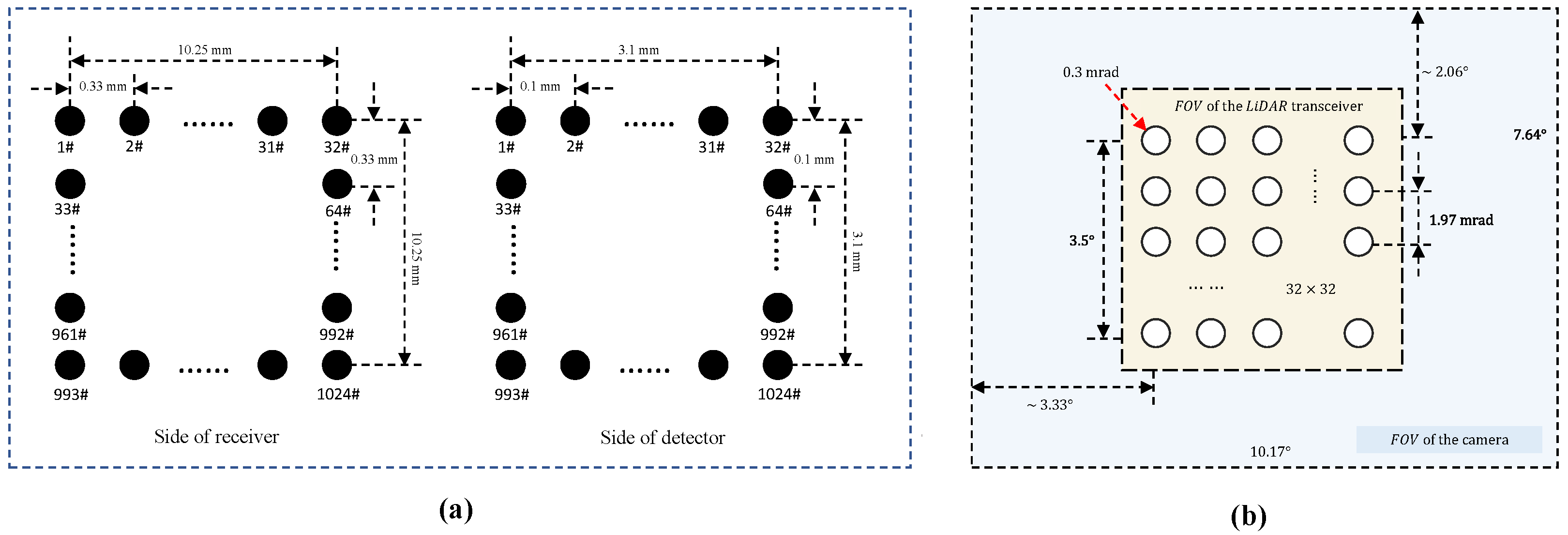
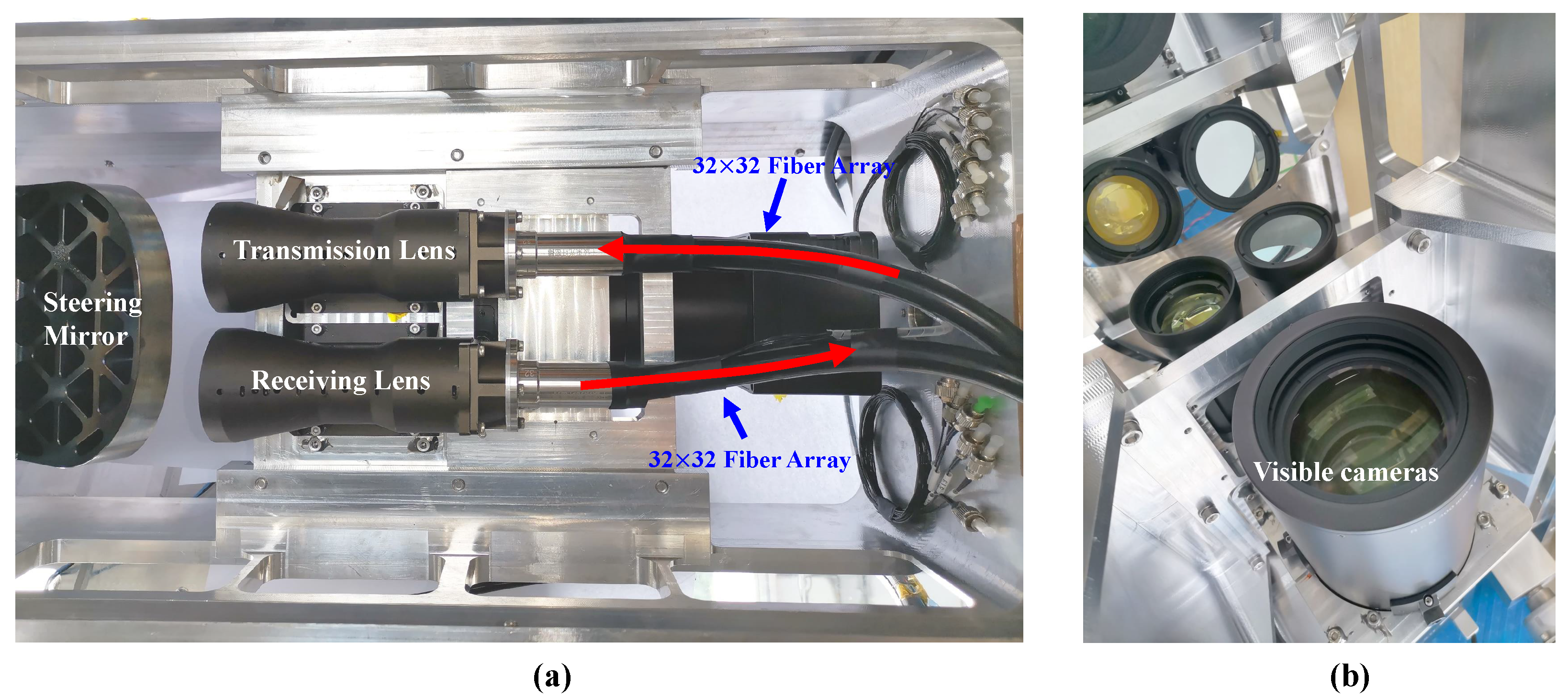
2.1. Transceiver Optics
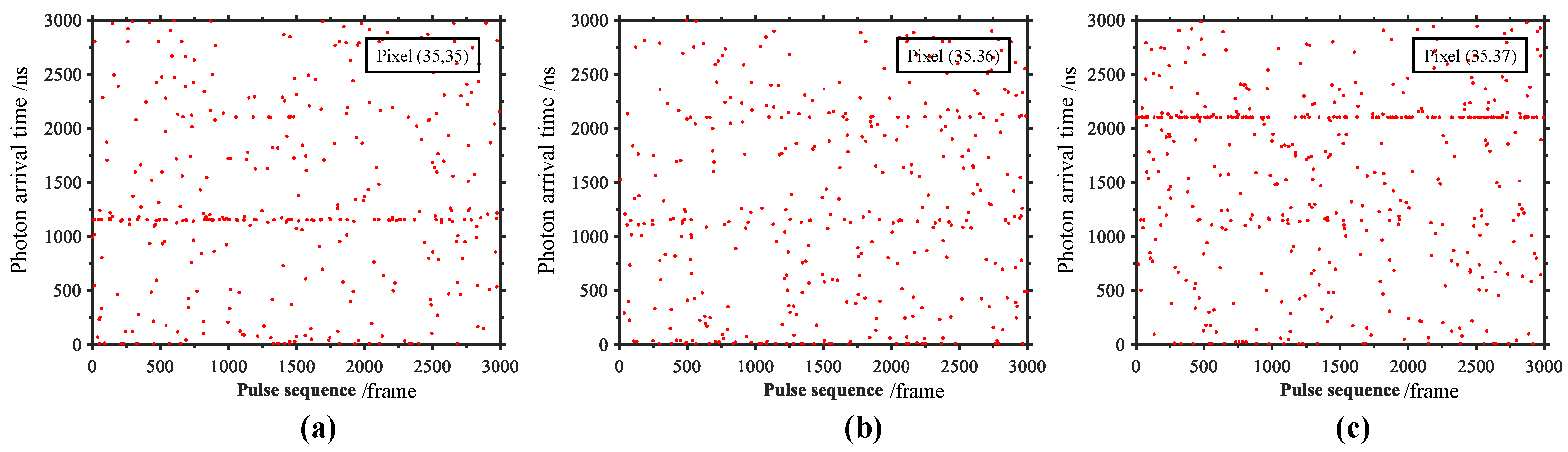
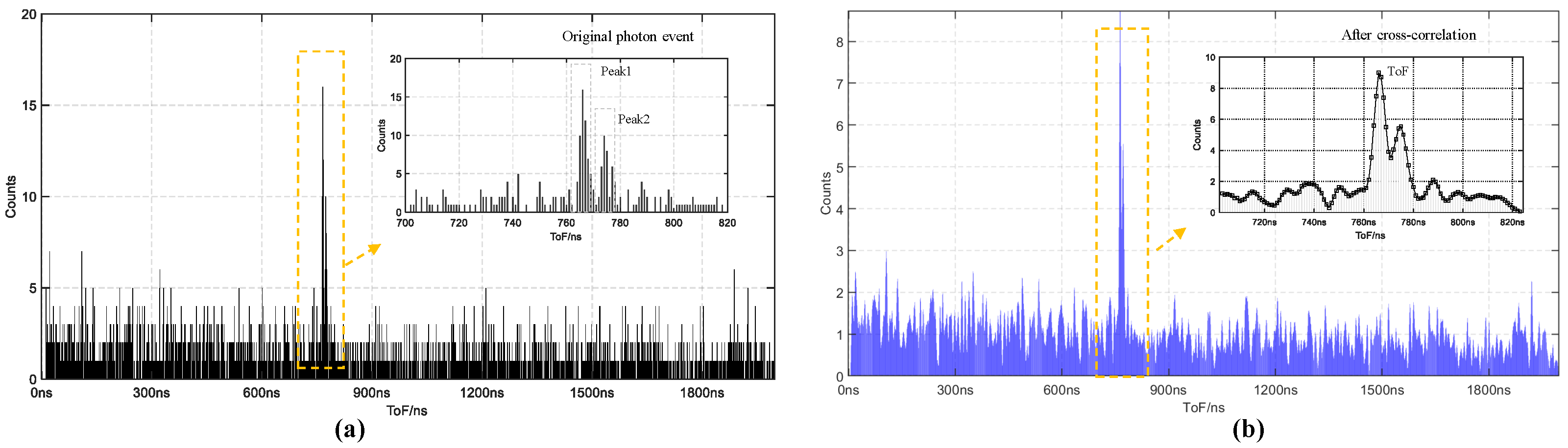
2.2. Data Processing Method
3. Field Experiments and Discussion
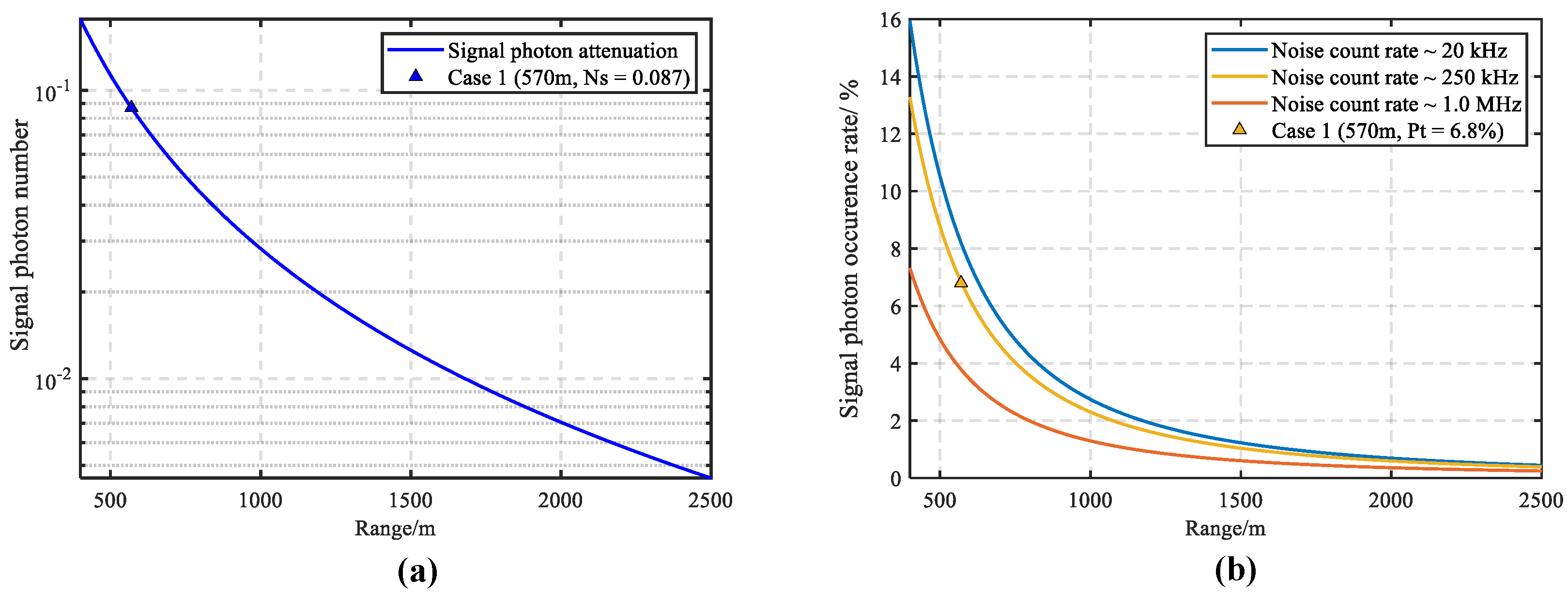
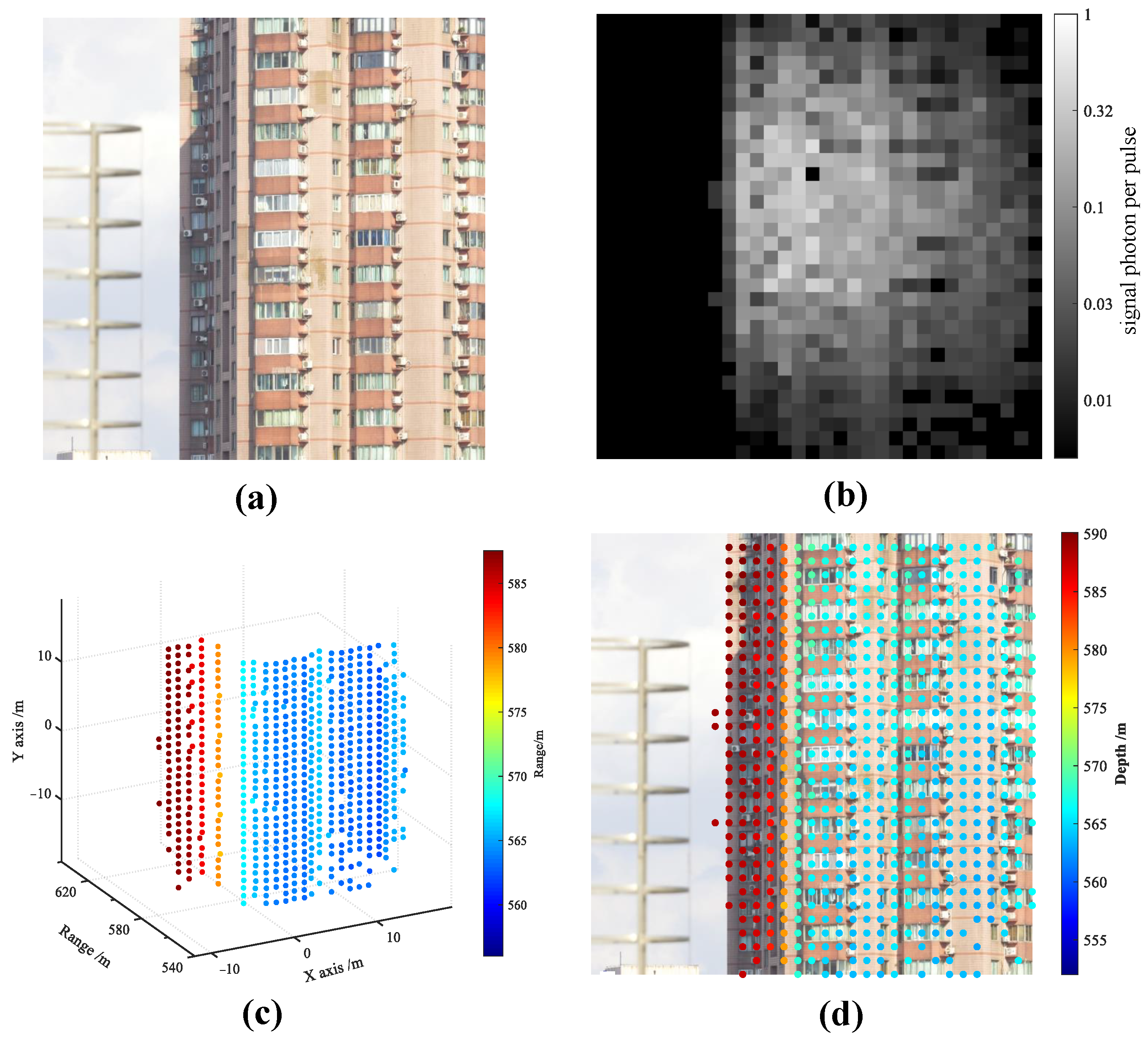
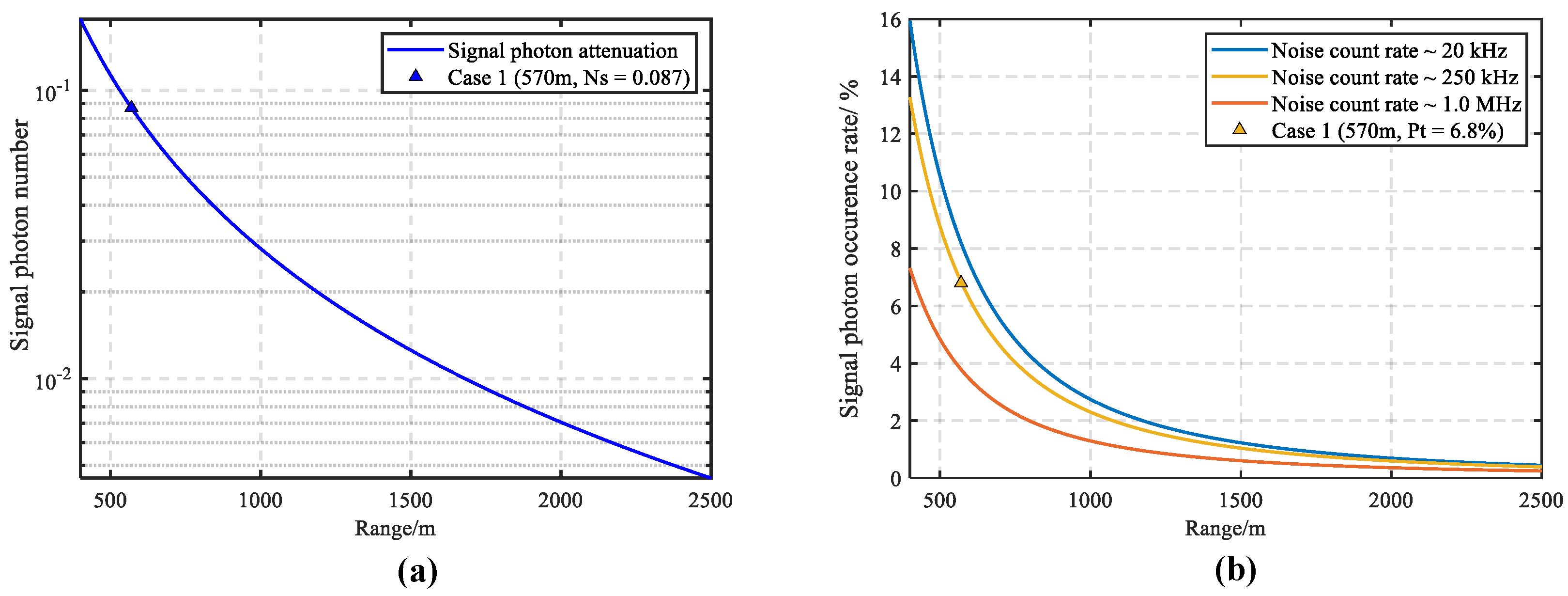
3.1. Case 1 at 500 m
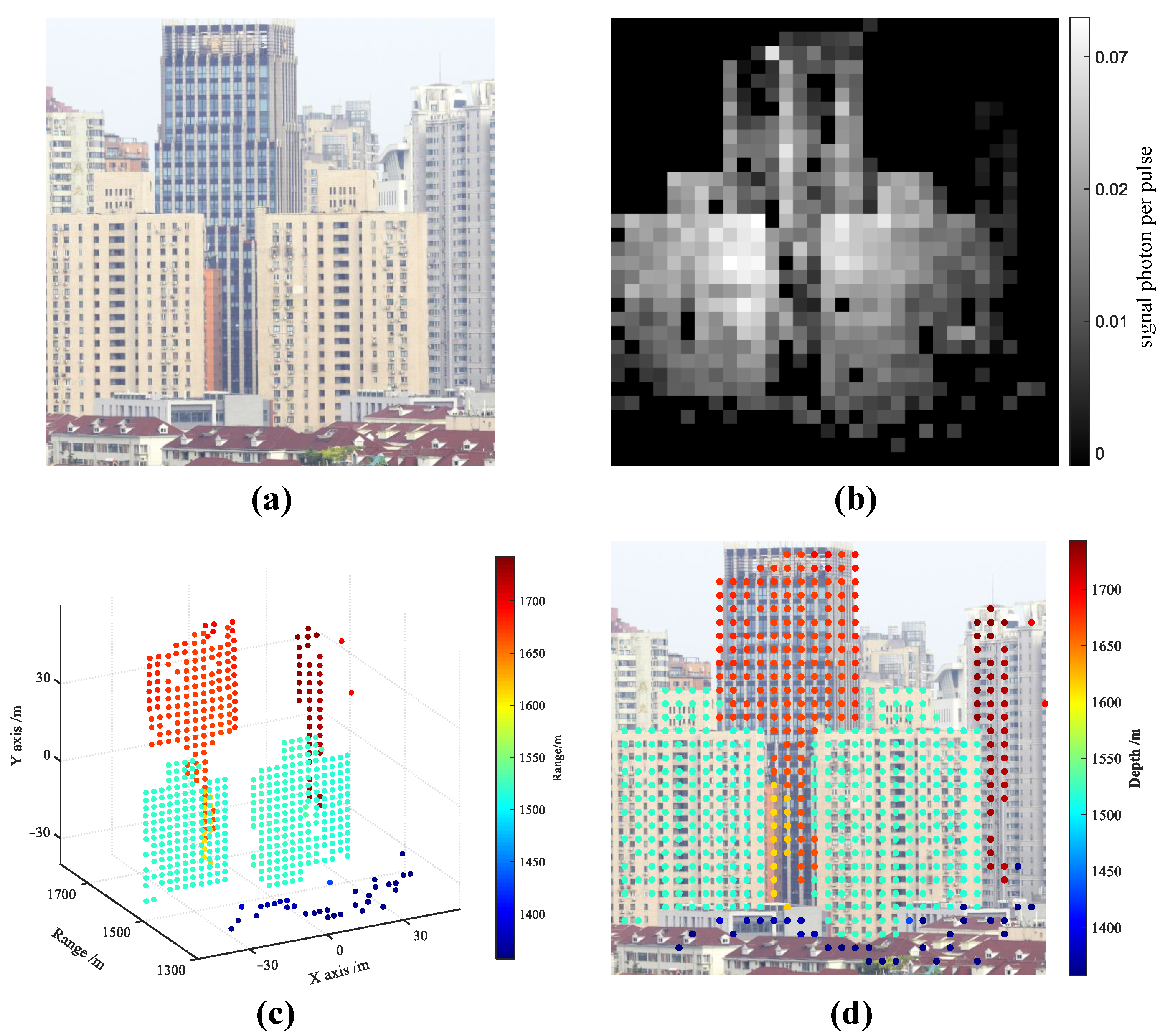
3.2. Case 2 at 1600 m
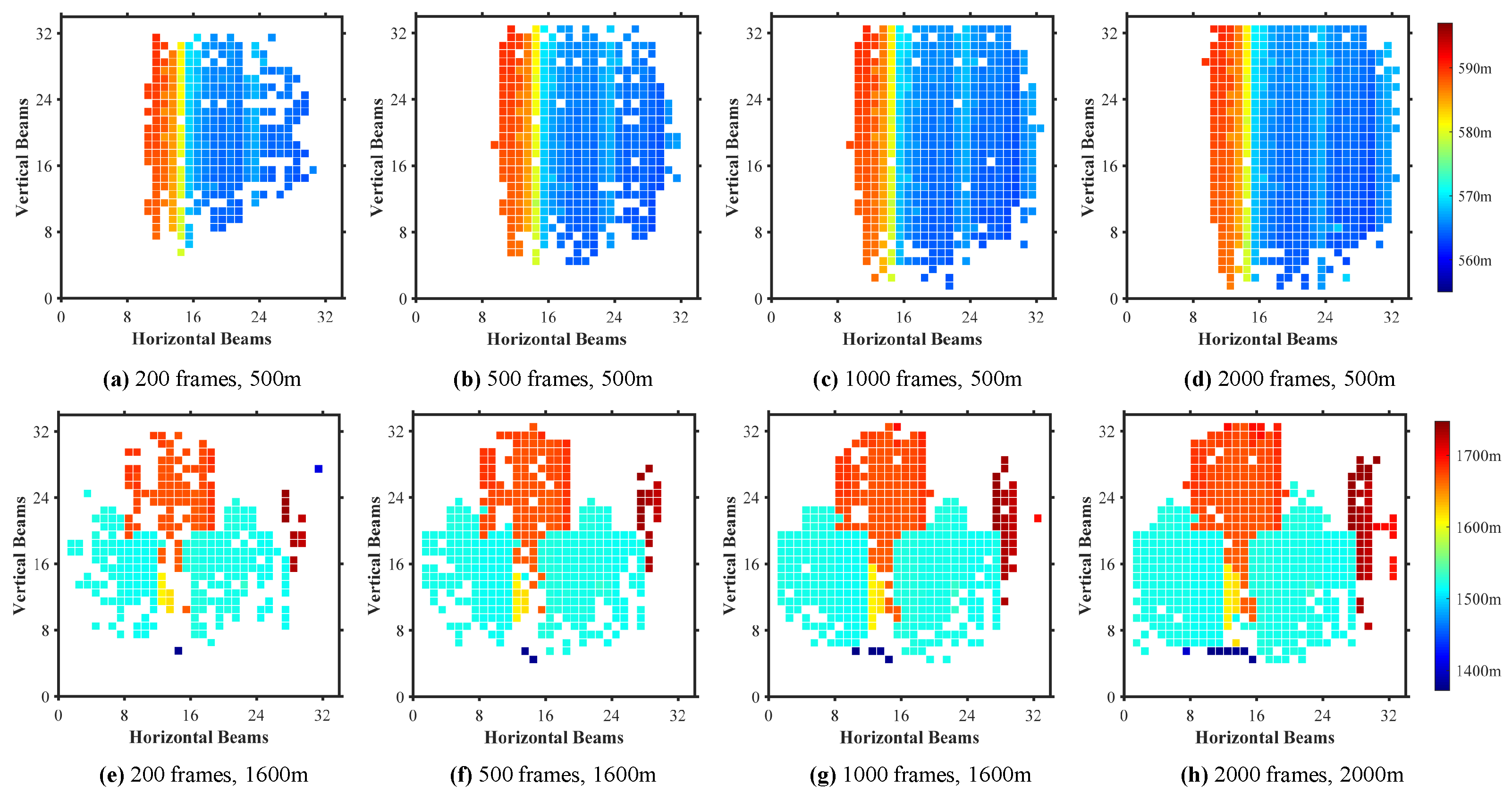
3.3. Performance at Short Acquisition Time
4. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| FoV | field-of-view |
| LiDAR | light detection and ranging |
| TDC | time-to-digit converter |
| SNR | signal-to-noise ratio |
| DOE | diffractive optical elements |
| SPAD | single-photon avalanche photodiode |
| Gm-APD | Geiger-mode Avalanche Photo Diode |
References
- Lin, Y.C.; Manish, R.; Bullock, D.; Habib, A. Comparative Analysis of Different Mobile LiDAR Mapping Systems for Ditch Line Characterization. Remote Sens. 2021, 13, 2485. [Google Scholar] [CrossRef]
- Kulawiak, M. A Cost-Effective Method for Reconstructing City-Building 3D Models from Sparse Lidar Point Clouds. Remote Sens. 2022, 14, 1278. [Google Scholar] [CrossRef]
- Zhao, X.; Sun, P.; Xu, Z.; Min, H.; Yu, H. Fusion of 3D LIDAR and Camera Data for Object Detection in Autonomous Vehicle Applications. IEEE Sens. J. 2020, 20, 4901–4913. [Google Scholar] [CrossRef] [Green Version]
- Pierrottet, D.F.; Amzajerdian, F.; Meadows, B.L.; Estes, R.; Noe, A.M. Characterization of 3D imaging lidar for hazard avoidance and autonomous landing on the Moon. In Proceedings of the SPIE Conference on Laser Radar Technology and Applications XII, Orlando, FL, USA, 3 May 2007; Volume 655. [Google Scholar] [CrossRef]
- Fouche, D.G. Detection and false-alarm probabilities for laser radars that use Geiger-mode detectors. Appl. Opt. 2003, 42, 5388–5398. [Google Scholar] [CrossRef]
- McManamon, P.F. Review of ladar: A historic, yet emerging, sensor technology with rich phenomenology. Opt. Eng. 2012, 51, 060901. [Google Scholar] [CrossRef] [Green Version]
- McCarthy, A.; Collins, R.J.; Krichel, N.J.; Fernandez, V.; Wallace, A.M.; Buller, G.S. Long-range time-of-flight scanning sensor based on high-speed time-correlated single-photon counting. Appl. Opt. 2009, 48, 6241–6251. [Google Scholar] [CrossRef] [Green Version]
- Henriksson, M.; Larsson, H.; Gronwall, C.; Tolt, G. Continuously scanning time-correlated single-photon-counting single-pixel 3D lidar. Opt. Eng. 2017, 56, 031204. [Google Scholar] [CrossRef]
- McCarthy, A.; Ren, X.; Della Frera, A.; Gemmell, N.R.; Krichel, N.J.; Scarcella, C.; Ruggeri, A.; Tosi, A.; Buller, G.S. Kilometer-range depth imaging at 1550 nm wavelength using an InGaAs/InP single-photon avalanche diode detector. Opt. Express 2013, 21, 22098–22113. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Yang, Y.; Yan, S.; Zhang, B.; Wang, C. Real-time variable field-of-view scanning of LiDAR by controlling the drive voltage of MEMS micromirror. Optik 2021, 246, 167760. [Google Scholar] [CrossRef]
- Miller, S.A.; Chang, Y.C.; Phare, C.T.; Shin, M.C.; Zadka, M.; Roberts, S.P.; Stern, B.; Ji, X.; Mohanty, A.; Gordillo, O.A.J.; et al. Large-scale optical phased array using a low-power multi-pass silicon photonic platform. Optica 2020, 7, 3–6. [Google Scholar] [CrossRef]
- Li, Z.; Wu, E.; Pang, C.; Du, B.; Tao, Y.; Peng, H.; Zeng, H.; Wu, G. Multi-beam single-photon-counting three-dimensional imaging lidar. Opt. Express 2017, 25, 10189–10195. [Google Scholar] [CrossRef] [PubMed]
- Wu, D.; Zheng, T.; Wang, L.; Chen, X.; Yang, L.; Li, Z.; Wu, G. Multi-beam single-photon LiDAR with hybrid multiplexing in wavelength and time. Opt. Laser Technol. 2022, 145, 107477. [Google Scholar] [CrossRef]
- He, W.; Feng, Z.; Lin, J.; Shen, S.; Chen, Q.; Gu, G.; Zhou, B.; Zhang, P. Adaptive Depth Imaging With Single-Photon Detectors. IEEE Photonics J. 2017, 9, 7801812. [Google Scholar] [CrossRef]
- Itzler, M.A.; Entwistle, M.; Owens, M.; Patel, K.; Jiang, X.; Slomkowski, K.; Rangwala, S.; Zalud, P.F.; Senko, T.; Tower, J.; et al. Geiger-mode avalanche photodiode focal plane arrays for three-dimensional imaging LADAR. In Proceedings of the SPIE Conference on Infrared Remote Sensing and Instrumentation XVIII, San Diego, CA, USA, 27 August 2010; Volume 7808. [Google Scholar] [CrossRef]
- Piron, F.; Morrison, D.; Yuce, M.R.; Redoute, J.M. A Review of Single-Photon Avalanche Diode Time-of-Flight Imaging Sensor Arrays. IEEE Sens. J. 2021, 21, 12654–12666. [Google Scholar] [CrossRef]
- Albota, M.A.; Aull, B.F.; Fouche, D.G.; Heinrichs, R.M.; Kocher, D.G.; Marino, R.M.; Mooney, J.G.; Newbury, N.R.; O’Brien, M.E.; Player, B.E.; et al. Three-dimensional imaging laser radars with Geiger-mode avalanche photodiode arrays. Linc. Lab. J. 2002, 13, 351–370. [Google Scholar]
- Aull, B.F.; Loomis, A.H.; Young, D.J.; Heinrichs, R.M.; Felton, B.J.; Daniels, P.J.; Landers, D.J. Geiger-mode avalanche photodiodes for three-dimensional imaging. Linc. Lab. J. 2002, 13, 335–350. [Google Scholar]
- Hiskett, P.; Gordon, K.; Copley, J.; Lamb, R. Long Range 3D Imaging with a 32 × 32 Geiger Mode InGaAs/InP Camera; SPIE Sensing Technology + Applications; SPIE: Bellingham, WA, USA, 2014; Volume 9114. [Google Scholar]
- Henriksson, M.; Jonsson, P. Photon-counting panoramic three-dimensional imaging using a Geiger-mode avalanche photodiode array. Opt. Eng. 2018, 57, 093104. [Google Scholar] [CrossRef]
- Chan, S.; Halimi, A.; Zhu, F.; Gyongy, I.; Henderson, R.K.; Bowman, R.; McLaughlin, S.; Buller, G.S.; Leach, J. Long-range depth imaging using a single-photon detector array and non-local data fusion. Sci. Rep. 2019, 9, 8075. [Google Scholar] [CrossRef] [Green Version]
- Hao, Q.; Tao, Y.; Cao, J.; Cheng, Y. Development of pulsed-laser three-dimensional imaging flash lidar using APD arrays. Microw. Opt. Technol. Lett. 2021, 63, 2492–2509. [Google Scholar] [CrossRef]
- Degnan, J.; Machan, R.; Leventhal, E.; Lawrence, D.; Jodor, G.; Field, C. Inflight performance of a second generation, photon counting, 3D imaging lidar—Art. no. 695007. In Proceedings of the Conference on Laser Radar Technology and Application XIII, Orlando, FL, USA, 19–20 March 2008; Volume 6950, p. 95007. [Google Scholar] [CrossRef]
- Degnan, J.J. Scanning, Multibeam, Single Photon Lidars for Rapid, Large Scale, High Resolution, Topographic and Bathymetric Mapping. Remote Sens. 2016, 8, 958. [Google Scholar] [CrossRef] [Green Version]
- Brown, R.; Hartzell, P.; Glennie, C. Evaluation of SPL100 Single Photon Lidar Data. Remote Sens. 2020, 12, 722. [Google Scholar] [CrossRef] [Green Version]
- Lee, X.; Wang, X.Y.; Cui, T.X.; Wang, C.H.; Li, Y.X.; Li, H.L.; Wang, Q. Increasing the effective aperture of a detector and enlarging the receiving field of view in a 3D imaging lidar system through hexagonal prism beam splitting. Opt. Express 2016, 24, 15222–15231. [Google Scholar] [CrossRef]
- Yu, A.W.; Krainak, M.A.; Harding, D.J.; Abshire, J.B.; Sun, X.; Ramos-Izquierdo, L.; Cavanaugh, J.; Valett, S.; Winkert, T.; Plants, M.; et al. A 16-beam Non-Scanning Swath Mapping Laser Altimeter Instrument. In Proceedings of the Conference on Solid State Lasers XXII—Technology and Devices, San Francisco, CA, USA, 2–4 February 2013; Volume 8599. [Google Scholar] [CrossRef] [Green Version]
- Yu, A.W.; Krainak, M.A.; Harding, D.J.; Abshire, J.B.; Sun, X.L.; Cavanaugh, J.; Valett, S.; Ramos-Izquierdo, L.; Winkert, T.; Kirchner, C.; et al. Development Effort of the Airborne Lidar Simulator for the Lidar Surface Topography (LIST) Mission. In Proceedings of the Conference on Lidar Technologies, Techniques, and Measurements for Atmospheric Remote Sensing VII, Prague, Czech Republic, 19–20 September 2011; Volume 8182. [Google Scholar] [CrossRef]
- Krichel, N.J.; McCarthy, A.; Rech, I.; Ghioni, M.; Gulinatti, A.; Buller, G.S. Cumulative data acquisition in comparative photon-counting three-dimensional imaging. J. Mod. Opt. 2011, 58, 244–256. [Google Scholar] [CrossRef]
- Tolt, G.; Gronwall, C.; Henriksson, M. Peak detection approaches for time-correlated single-photon counting three-dimensional lidar systems. Opt. Eng. 2018, 57, 031306. [Google Scholar] [CrossRef]
- Luo, T.; Chen, D.; Chen, Z.; Dong, Z.; Wu, W.; Wang, X.; Yan, R.; Fan, R. Voxel-based spatial elongation filtering method for airborne single-photon LiDAR data. Opt. Express 2020, 28, 3922–3931. [Google Scholar] [CrossRef] [PubMed]
- Tang, H.; Swatantran, A.; Barrett, T.; DeCola, P.; Dubayah, R. Voxel-Based Spatial Filtering Method for Canopy Height Retrieval from Airborne Single-Photon Lidar. Remote Sens. 2016, 8, 771. [Google Scholar] [CrossRef] [Green Version]
- Wallace, A.M.; Sung, R.C.W.; Buller, G.S.; Harkins, R.D.; Warburton, R.E.; Lamb, R.A. Detecting and characterising returns in a pulsed ladar system. IEEE Proc. Vis. Image Signal Process. 2006, 153, 160–172. [Google Scholar] [CrossRef] [Green Version]
- Oh, M.S.; Kong, H.J.; Kim, T.H.; Hong, K.H.; Kim, B.W. Reduction of range walk error in direct detection laser radar using a Geiger mode avalanche photodiode. Opt. Commun. 2010, 283, 304–308. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameter | Parameter Value |
|---|---|
| Laser wavelength | 1064 nm |
| Pulse width | 1 ns |
| Emitted laser power | 0.62 W |
| Laser repetition rate | 5 kHz |
| Average single beam energy | 0.12 J |
| Beam divergent angle | 300 rad |
| Scale of the laser beam | 32 by 32 |
| Total Field of view | 3.5 degree |
| Angle between neighboring beam | 1.97 mrad |
| Filter bandwidth | 0.5 nm |
| Receiving aperture | 34 mm |
| Focus of receiving lens | 166 mm |
| Numerical aperture of the fiber | 0.22 |
| Core diameter of the receiving fiber | 50 m |
| Pixel pitch of the Gm-APD | 50 m |
| Resolution of the detector | 64 by 64 |
| Time range and resolution | 4 s, 1 ns |
| Focal length of the visible camera | 300 mm |
| Target | 200 Frames | 500 Frames | 1000 Frames | 2000 Frames |
|---|---|---|---|---|
| Approx. 500 m | 51.40% | 72.43% | 86.76% | 93.46% |
| Approx. 1600 m | 48.51% | 68.35% | 79.37% | 88.35% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, C.; Kong, W.; Huang, G.; Hou, J.; Jia, S.; Chen, T.; Shu, R. Design and Demonstration of a Novel Long-Range Photon-Counting 3D Imaging LiDAR with 32 × 32 Transceivers. Remote Sens. 2022, 14, 2851. https://doi.org/10.3390/rs14122851
Tan C, Kong W, Huang G, Hou J, Jia S, Chen T, Shu R. Design and Demonstration of a Novel Long-Range Photon-Counting 3D Imaging LiDAR with 32 × 32 Transceivers. Remote Sensing. 2022; 14(12):2851. https://doi.org/10.3390/rs14122851
Chicago/Turabian StyleTan, Changsheng, Wei Kong, Genghua Huang, Jia Hou, Shaolei Jia, Tao Chen, and Rong Shu. 2022. "Design and Demonstration of a Novel Long-Range Photon-Counting 3D Imaging LiDAR with 32 × 32 Transceivers" Remote Sensing 14, no. 12: 2851. https://doi.org/10.3390/rs14122851
APA StyleTan, C., Kong, W., Huang, G., Hou, J., Jia, S., Chen, T., & Shu, R. (2022). Design and Demonstration of a Novel Long-Range Photon-Counting 3D Imaging LiDAR with 32 × 32 Transceivers. Remote Sensing, 14(12), 2851. https://doi.org/10.3390/rs14122851