
Encoding Geospatial Vector Data for Deep Learning: LULC as a Use Case



Abstract
:1. Introduction
2. Related Work
2.1. Geospatial Vector Data with Semantics for Spatial Predictions
2.2. LULC Classification Based on Imagery
2.3. LULC Classifications with Geospatial Vector Data
3. Methodology
3.1. Input Data
3.2. Experiment One
3.2.1. The GSCM Encoding
3.2.2. The Layered GSCM Encoding
3.2.3. The Channel GSCM Encoding
3.2.4. The CUBE Encoding
3.2.5. The Perceiver Model
3.2.6. Hyperparameter Optimization
3.2.7. Training and Testing the Model
3.3. Experiment Two
4. Results and Analysis
4.1. Experiment One
4.2. Experiment Two
5. Discussion
5.1. Experiment One
5.2. Experiment Two
6. Conclusions and Future Research
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fisher, P. The pixel: A snare and a delusion. Int. J. Remote Sens. 1997, 18, 679–685. [Google Scholar] [CrossRef]
- Mc Cutchan, M.; Comber, A.J.; Giannopoulos, I.; Canestrini, M. Semantic Boosting: Enhancing Deep Learning Based LULC Classification. Remote Sens. 2021, 13, 3197. [Google Scholar] [CrossRef]
- Mc Cutchan, M.; Giannopoulos, I. Geospatial Semantics for Spatial Prediction. In Leibniz International Proceedings in Informatics (LIPIcs); Winter, S., Griffin, A., Sester, M., Eds.; Schloss Dagstuhl–Leibniz-Zentrum fuer Informatik: Dagstuhl, Germany, 2018; Volume 114, pp. 45:1–45:6. [Google Scholar] [CrossRef]
- Mc Cutchan, M.; Özdal Oktay, S.; Giannopoulos, I. Semantic-based urban growth prediction. Trans. GIS 2020, 24, 1482–1503. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 5998–6008. [Google Scholar]
- Jaegle, A.; Gimeno, F.; Brock, A.; Zisserman, A.; Vinyals, O.; Carreira, J. Perceiver: General Perception with Iterative Attention. arXiv 2021, arXiv:2103.03206. [Google Scholar]
- Ertler, C.; Mislej, J.; Ollmann, T.; Porzi, L.; Kuang, Y. Traffic Sign Detection and Classification around the World. In Proceedings of the European Conference on Computer Vision (ECCV), Glasgow, UK, 23–28 August 2020. [Google Scholar]
- Veer, R.V.; Bloem, P.; Folmer, E. Deep learning for classification tasks on geospatial vector polygons. arXiv 2018, arXiv:1806.03857. [Google Scholar]
- Yan, B.; Janowicz, K.; Mai, G.; Gao, S. From ITDL to Place2Vec: Reasoning About Place Type Similarity and Relatedness by Learning Embeddings From Augmented Spatial Contexts. In Proceedings of the 25th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems (SIGSPATIAL ’17), Redondo Beach, CA, USA, 7–10 November 2017; Association for Computing Machinery: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Q.; Tu, W.; Mai, K.; Yao, Y.; Chen, Y. Functional urban land use recognition integrating multi-source geospatial data and cross-correlations. Comput. Environ. Urban Syst. 2019, 78, 101374. [Google Scholar] [CrossRef]
- Mikolov, T.; Sutskever, I.; Chen, K.; Corrado, G.; Dean, J. Distributed Representations of Words and Phrases and their Compositionality. Adv. Neural Inf. Process. Syst. 2013, 26, 3111–3119. [Google Scholar] [CrossRef]
- Grekousis, G.; Mountrakis, G.; Kavouras, M. An overview of 21 global and 43 regional land-cover mapping products. Int. J. Remote Sens. 2015, 36, 5309–5335. [Google Scholar] [CrossRef]
- Thanh Noi, P.; Kappas, M. Comparison of Random Forest, k-Nearest Neighbor, and Support Vector Machine Classifiers for Land Cover Classification Using Sentinel-2 Imagery. Sensors 2017, 18, 18. [Google Scholar] [CrossRef]
- Mishra, V.N.; Prasad, R.; Kumar, P.; Gupta, D.K.; Dikshit, P.K.S.; Dwivedi, S.B.; Ohri, A. Evaluating the effects of spatial resolution on land use and land cover classification accuracy. In Proceedings of the 2015 International Conference on Microwave, Optical and Communication Engineering (ICMOCE), Bhubaneswar, India, 18–20 December 2015; pp. 208–211. [Google Scholar]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Comber, A.J.; Wadsworth, R.A.; Fisher, P.F. Using semantics to clarify the conceptual confusion between land cover and land use: The example of ‘forest’. J. Land Use Sci. 2008, 3, 185–198. [Google Scholar] [CrossRef]
- Foley, J.A. Global Consequences of Land Use. Science 2005, 309, 570–574. [Google Scholar] [CrossRef] [PubMed]
- Pielke, R.A. Land Use and Climate Change. Science 2005, 310, 1625–1626. [Google Scholar] [CrossRef]
- Pielke, R.A., Sr.; Pitman, A.; Niyogi, D.; Mahmood, R.; McAlpine, C.; Hossain, F.; Goldewijk, K.K.; Nair, U.; Betts, R.; Fall, S.; et al. Land use/land cover changes and climate: Modeling analysis and observational evidence. WIREs Clim. Chang. 2011, 2, 828–850. [Google Scholar] [CrossRef]
- Li, Z.; White, J.C.; Wulder, M.A.; Hermosilla, T.; Davidson, A.M.; Comber, A.J. Land cover harmonization using Latent Dirichlet Allocation. Int. J. Geogr. Inf. Sci. 2020, 35, 348–374. [Google Scholar] [CrossRef]
- Polasky, S.; Nelson, E.; Pennington, D.; Johnson, K.A. The Impact of Land-Use Change on Ecosystem Services, Biodiversity and Returns to Landowners: A Case Study in the State of Minnesota. Environ. Resour. Econ. 2011, 48, 219–242. [Google Scholar] [CrossRef]
- De Chazal, J.; Rounsevell, M.D. Land-use and climate change within assessments of biodiversity change: A review. Glob. Environ. Chang. 2009, 19, 306–315. [Google Scholar] [CrossRef]
- Tayebi, M.; Fim Rosas, J.T.; Mendes, W.D.S.; Poppiel, R.R.; Ostovari, Y.; Ruiz, L.F.C.; dos Santos, N.V.; Cerri, C.E.P.; Silva, S.H.G.; Curi, N.; et al. Drivers of Organic Carbon Stocks in Different LULC History and along Soil Depth for a 30 Years Image Time Series. Remote Sens. 2021, 13, 2223. [Google Scholar] [CrossRef]
- Metzger, M.; Rounsevell, M.; Acosta-Michlik, L.; Leemans, R.; Schröter, D. The vulnerability of ecosystem services to land use change. Agric. Ecosyst. Environ. 2006, 114, 69–85. [Google Scholar] [CrossRef]
- Fu, P.; Weng, Q. A time series analysis of urbanization induced land use and land cover change and its impact on land surface temperature with Landsat imagery. Remote Sens. Environ. 2016, 175, 205–214. [Google Scholar] [CrossRef]
- Debbage, N.; Shepherd, J.M. The urban heat island effect and city contiguity. Comput. Environ. Urban Syst. 2015, 54, 181–194. [Google Scholar] [CrossRef]
- Schultz, M.; Voss, J.; Auer, M.; Carter, S.; Zipf, A. Open land cover from OpenStreetMap and remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2017, 63, 206–213. [Google Scholar] [CrossRef]
- Mai, G.; Janowicz, K.; Yan, B.; Zhu, R.; Cai, L.; Lao, N. Multi-Scale Representation Learning for Spatial Feature Distributions using Grid Cells. arXiv 2020, arXiv:2003.00824. [Google Scholar]
- Yan, X.; Ai, T.; Yang, M.; Tong, X. Graph convolutional autoencoder model for the shape coding and cognition of buildings in maps. Int. J. Geogr. Inf. Sci. 2021, 35, 490–512. [Google Scholar] [CrossRef]
- Bengana, N.; Heikkilä, J. Improving Land Cover Segmentation Across Satellites Using Domain Adaptation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1399–1410. [Google Scholar] [CrossRef]
- Antropov, O.; Rauste, Y.; Šćepanović, S.; Ignatenko, V.; Lönnqvist, A.; Praks, J. Classification of Wide-Area SAR Mosaics: Deep Learning Approach for Corine Based Mapping of Finland Using Multitemporal Sentinel-1 Data. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 4283–4286. [Google Scholar] [CrossRef]
- Balado, J.; Arias, P.; Díaz-Vilariño, L.; González-deSantos, L.M. Automatic CORINE land cover classification from airborne LIDAR data. Procedia Comput. Sci. 2018, 126, 186–194. [Google Scholar] [CrossRef]
- Balzter, H.; Cole, B.; Thiel, C.; Schmullius, C. Mapping CORINE Land Cover from Sentinel-1A SAR and SRTM Digital Elevation Model Data using Random Forests. Remote Sens. 2015, 7, 14876–14898. [Google Scholar] [CrossRef]
- Stadler, C.; Lehmann, J.; Höffner, K.; Auer, S. LinkedGeoData: A Core for a Web of Spatial Open Data. Semant. Web J. 2012, 3, 333–354. [Google Scholar] [CrossRef]
- Akiba, T.; Sano, S.; Yanase, T.; Ohta, T.; Koyama, M. Optuna: A Next-generation Hyperparameter Optimization Framework. In Proceedings of the 25rd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Anchorage, AK, USA, 4–8 August 2019. [Google Scholar]
- Bergstra, J.; Bardenet, R.; Bengio, Y.; Kégl, B. Algorithms for Hyper-Parameter Optimization. In Advances in Neural Information Processing Systems; Shawe-Taylor, J., Zemel, R., Bartlett, P., Pereira, F., Weinberger, K.Q., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2011; Volume 24. [Google Scholar]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- You, Y.; Li, J.; Hseu, J.; Song, X.; Demmel, J.; Hsieh, C. Reducing BERT Pre-Training Time from 3 Days to 76 Minutes. arXiv 2019, arXiv:1904.00962. [Google Scholar]
- Goodchild, M. Citizens as Sensors: The World of Volunteered Geography. GeoJournal 2007, 69, 211–221. [Google Scholar] [CrossRef]
- Gokl, L.; Mc Cutchan, M.; Mazurkiewicz, B.; Fogliaroni, P.; Giannopoulos, I.; Fogliaroni, P.; Mazurkiewicz, B.; Kattenbeck, M.; Giannopoulos, I.; Fogliaroni, P.; et al. Towards urban environment familiarity prediction. Adv. Cartogr. Gisci. ICA 2018, 62, 26. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
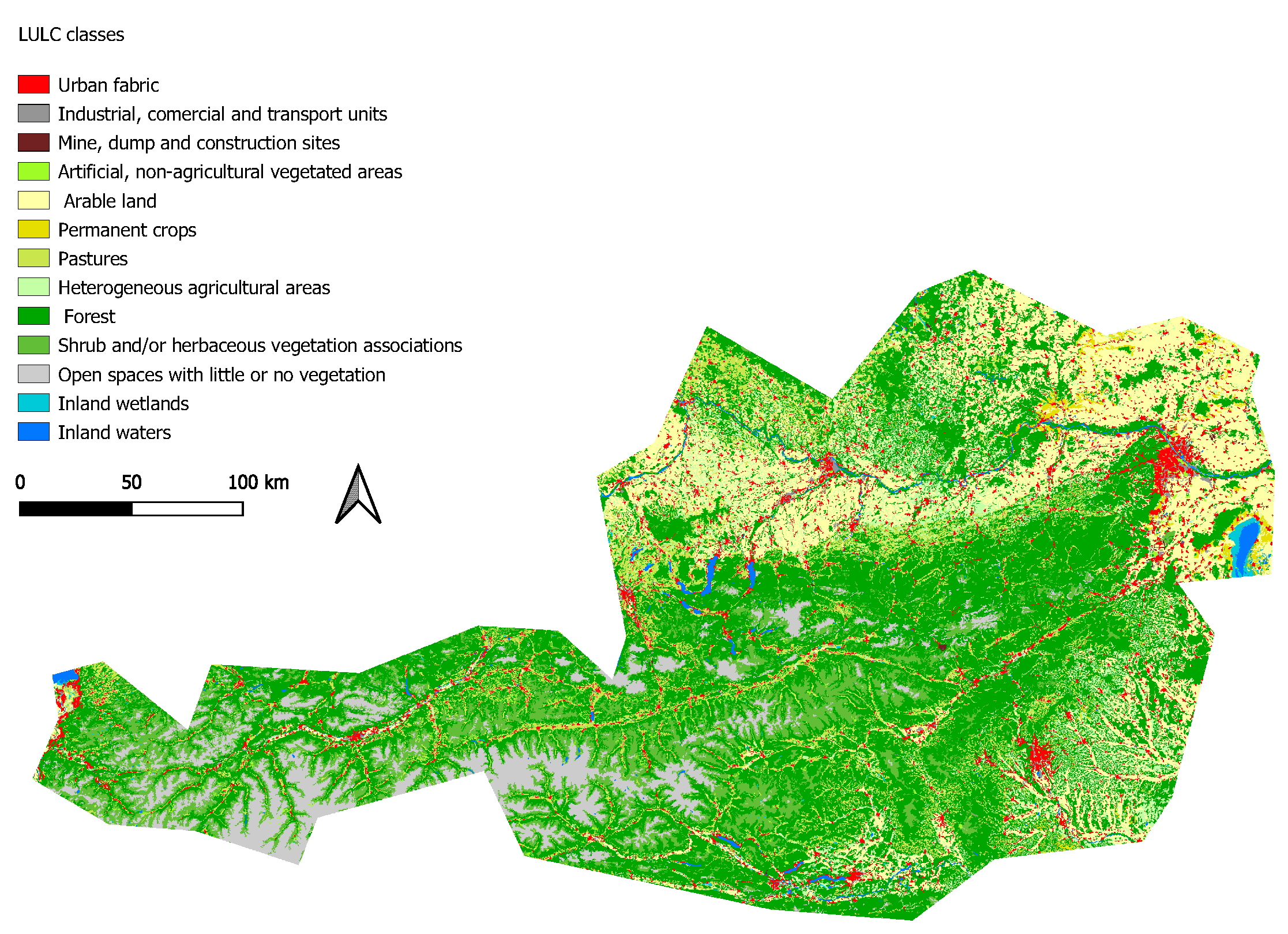
| Code | CLC Level 2 LULC Class |
|---|---|
| I | Urban fabric |
| II | Industrial, commercial and transport units |
| III | Mine, dump and construction sites |
| IV | Artificial, non-agricultural vegetated areas |
| V | Arable land |
| VI | Permanent crops |
| VII | Pastures |
| VIII | Heterogeneous agricultural areas |
| IX | Forest |
| X | Scrub and/or herbaceous vegetation associations |
| XI | Open spaces with little or no vegetation |
| XII | Inland wetlands |
| XIII | Inland waters |
| Hyperparameter [6] | Seach Space | Description |
|---|---|---|
| Learning rate | Learning rate of the LAMB optimizer | |
| Dropout | Dropout for attention and fully connected layers | |
| Depth | Number of iteratively applied Perceiver blocks | |
| Number of latents | Number of centroids in latent space | |
| Dimension of latents | Dimension of latent space | |
| Number of cross-heads | Number of heads for cross-attention | |
| Number of latent-heads | Number of heads for latent-attention | |
| Dimension of cross-heads | Dimension of each cross-head | |
| Dimension of latent-heads | Dimension of each latent-head | |
| Number of self-attention blocks | Number of self-attention blocks used | |
| Number of frequency bands | Bands used for Fourier positional encoding | |
| Maximum frequency | Maxium frequency for Fourier positional encoding |
| GSCM | LGSCM | CGSCM | CUBE | |
|---|---|---|---|---|
| OA | 64.47% | 61.01% | 72.31% | 66.10% |
| Kappa | 0.58 | 0.54 | 0.69 | 0.57 |
| Precision | Recall | |||||||
|---|---|---|---|---|---|---|---|---|
| GSCM | LGSCM | CGSCM | CUBE | GSCM | LGSCM | CGSCM | CUBE | |
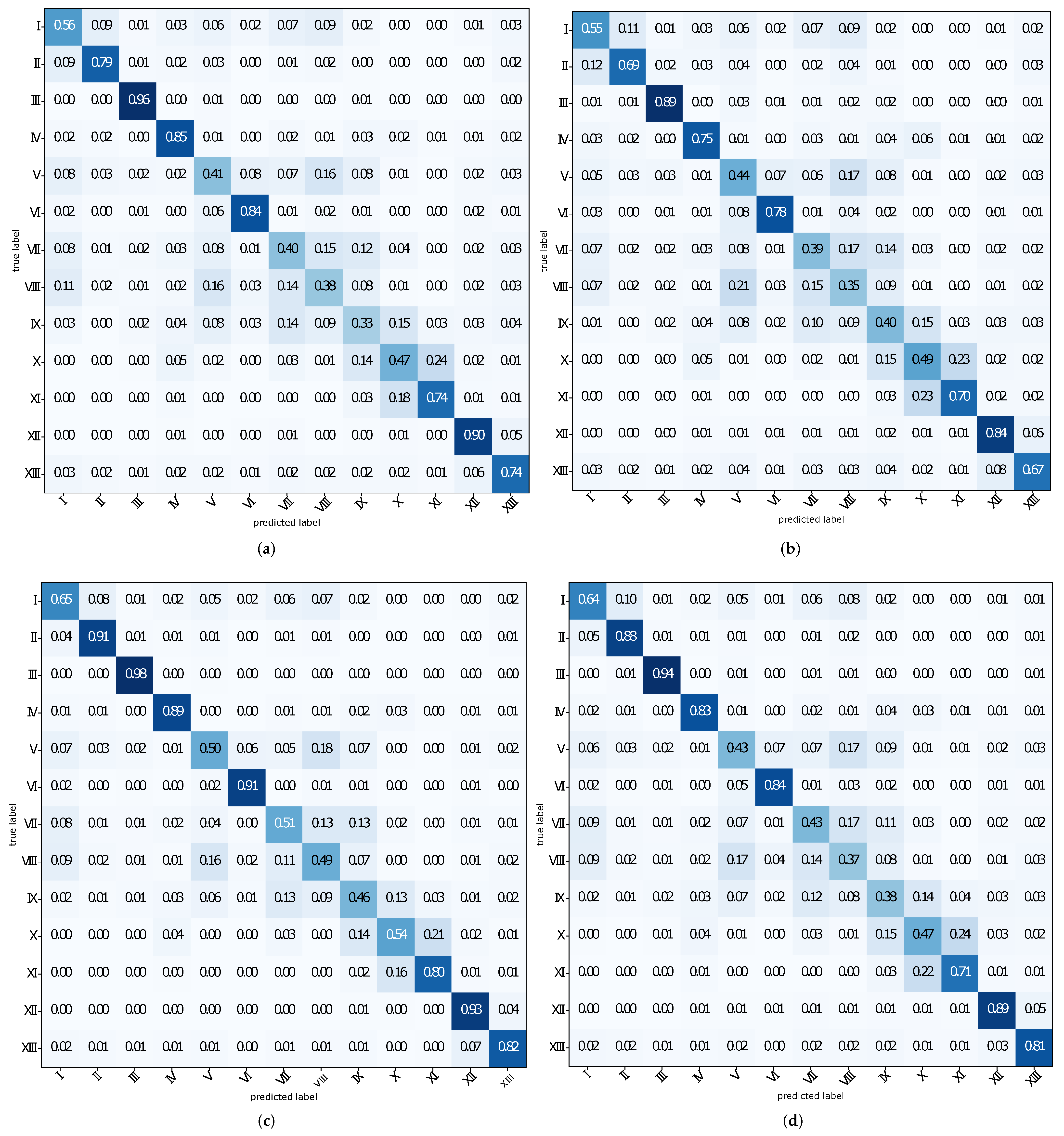
| I | 0.54 | 0.58 | 0.65 | 0.62 | 0.56 | 0.55 | 0.65 | 0.64 |
| II | 0.80 | 0.75 | 0.84 | 0.79 | 0.79 | 0.69 | 0.90 | 0.88 |
| III | 0.90 | 0.85 | 0.92 | 0.89 | 0.96 | 0.89 | 0.98 | 0.94 |
| IV | 0.77 | 0.76 | 0.87 | 0.82 | 0.85 | 0.75 | 0.89 | 0.83 |
| V | 0.44 | 0.40 | 0.57 | 0.48 | 0.41 | 0.44 | 0.50 | 0.43 |
| VI | 0.81 | 0.81 | 0.88 | 0.82 | 0.84 | 0.78 | 0.91 | 0.84 |
| VII | 0.44 | 0.42 | 0.56 | 0.48 | 0.40 | 0.39 | 0.51 | 0.43 |
| VIII | 0.39 | 0.34 | 0.49 | 0.39 | 0.38 | 0.35 | 0.49 | 0.37 |
| IX | 0.38 | 0.38 | 0.48 | 0.41 | 0.33 | 0.40 | 0.46 | 0.38 |
| X | 0.53 | 0.48 | 0.60 | 0.51 | 0.47 | 0.49 | 0.54 | 0.47 |
| XI | 0.70 | 0.71 | 0.75 | 0.69 | 0.74 | 0.70 | 0.80 | 0.71 |
| XII | 0.81 | 0.78 | 0.85 | 0.83 | 0.90 | 0.84 | 0.93 | 0.89 |
| XIII | 0.70 | 0.69 | 0.84 | 0.77 | 0.74 | 0.67 | 0.82 | 0.81 |
| Hyperparameter | GSCM | LGSCM | CUBE | CGSCM |
|---|---|---|---|---|
| Learning rate | 0.000282 | 0.000178 | 0.002558 | 0.000242 |
| Dropout | 0.3596 | 0.4936 | 0.4123 | 0.3532 |
| Depth | 10 | 6 | 6 | 10 |
| Number of latents | 512 | 512 | 384 | 384 |
| Dimension of latents | 384 | 128 | 256 | 384 |
| Number of cross-heads | 3 | 2 | 2 | 2 |
| Number of latent-heads | 4 | 4 | 3 | 3 |
| Dimension of cross-heads | 256 | 512 | 512 | 512 |
| Dimension of latent-heads | 384 | 128 | 128 | 128 |
| Number of self-Attention blocks | 4 | 4 | 2 | 1 |
| Number of frequency bands | 11 | 6 | 7 | 12 |
| Maximum frequency | 13.64 | 7.04 | 13.65 | 7.09 |
| Level 0 | Level 0–1 | Level 0–2 | Level 0–3 | |
|---|---|---|---|---|
| OA | 65.19% | 71.52% | 71.52% | 72.31% |
| Kappa | 0.61 | 0.68 | 0.68 | 0.69 |
| OWL classes | 3.97% | 70.34% | 96.11% | 100.0% |
| Precision | Recall | |||||||
|---|---|---|---|---|---|---|---|---|
| L.0 | L.0–1 | L.0–2 | L.0–3 | L.0 | L.0–1 | L.0–2 | L.0–3 | |
| I | 0.60 | 0.65 | 0.65 | 0.65 | 0.57 | 0.62 | 0.62 | 0.65 |
| II | 0.82 | 0.83 | 0.84 | 0.84 | 0.87 | 0.91 | 0.92 | 0.90 |
| III | 0.88 | 0.91 | 0.92 | 0.92 | 0.96 | 0.99 | 0.99 | 0.98 |
| IV | 0.82 | 0.85 | 0.86 | 0.87 | 0.88 | 0.91 | 0.91 | 0.89 |
| V | 0.44 | 0.57 | 0.55 | 0.57 | 0.35 | 0.49 | 0.50 | 0.50 |
| VI | 0.79 | 0.86 | 0.86 | 0.88 | 0.88 | 0.91 | 0.91 | 0.91 |
| VII | 0.43 | 0.55 | 0.56 | 0.56 | 0.38 | 0.50 | 0.50 | 0.51 |
| VIII | 0.42 | 0.49 | 0.50 | 0.49 | 0.42 | 0.48 | 0.46 | 0.49 |
| IX | 0.37 | 0.47 | 0.47 | 0.48 | 0.35 | 0.39 | 0.43 | 0.46 |
| X | 0.49 | 0.56 | 0.58 | 0.58 | 0.48 | 0.59 | 0.60 | 0.54 |
| XI | 0.68 | 0.75 | 0.75 | 0.75 | 0.66 | 0.74 | 0.74 | 0.80 |
| XII | 0.80 | 0.87 | 0.85 | 0.85 | 0.90 | 0.93 | 0.93 | 0.93 |
| XIII | 0.75 | 0.81 | 0.82 | 0.84 | 0.77 | 0.85 | 0.84 | 0.82 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mc Cutchan, M.; Giannopoulos, I. Encoding Geospatial Vector Data for Deep Learning: LULC as a Use Case. Remote Sens. 2022, 14, 2812. https://doi.org/10.3390/rs14122812
Mc Cutchan M, Giannopoulos I. Encoding Geospatial Vector Data for Deep Learning: LULC as a Use Case. Remote Sensing. 2022; 14(12):2812. https://doi.org/10.3390/rs14122812
Chicago/Turabian StyleMc Cutchan, Marvin, and Ioannis Giannopoulos. 2022. "Encoding Geospatial Vector Data for Deep Learning: LULC as a Use Case" Remote Sensing 14, no. 12: 2812. https://doi.org/10.3390/rs14122812
APA StyleMc Cutchan, M., & Giannopoulos, I. (2022). Encoding Geospatial Vector Data for Deep Learning: LULC as a Use Case. Remote Sensing, 14(12), 2812. https://doi.org/10.3390/rs14122812