1. Introduction
The BeiDou navigation satellite system (BDS) independently established and operated by China, as one of the four major global navigation satellite systems, aims to provide global users with positioning, navigation, and timing services. The BeiDou navigation satellite system is developed in three stages, with services ranging from China to the Asia–Pacific region, and finally to the world [
1]. In May 2003, the third geostationary earth orbit satellite was launched, and the BeiDou demonstration navigation system (BDS-1) was established, providing China with positioning, timing, and short message communication services [
2]. By the end of 2012, with the launch of 14 networked satellites including 5 geostationary earth orbit satellites, 5 inclined geosynchronous orbit (IGSO) satellites, and 4 medium earth orbit (MEO) satellites, the BeiDou regional navigation system (BDS-2) was established and its service scope was extended to the Asia–Pacific region. At the end of July 2020, it was officially announced that the BeiDou global navigation satellite system, comprising 24 MEO satellites, 3 GEO satellites, and 3 IGSO satellites, was completed. Since then, BDS-3 has provided global users with positioning, navigation and timing (PNT), global short message communication (GSMC), and international search and rescue (SAR), and provided a satellite-based augmentation system (SBAS), a ground augmentation system (GAS) as well as precise point positioning (PPP) and regional short message communication (RSMC) services for users in China and its surrounding areas [
3,
4,
5,
6,
7,
8].
PPP [
9,
10,
11] plays an important role in the global navigation satellite system (GNSS) high-precision positioning applications. It receives carrier phase observations and pseudorange observations through a single GNSS receiver, uses precise products and model empirical formulas to correct errors, and uses least squares, Kalman filtering, and other methods to determine high-precision absolute coordinates [
11]. Initially, the international GNSS service (IGS) only provides precise satellite clock and orbit products with a certain delay, which limits the PPP study to focus on post-processing. In order to obtain precise products with the shortest possible latency, the IGS launched a real-time pilot project (RTPP) in 2007. In 2013, real-time data streaming services via Networked Transport of RTCM (Radio Technical Commission for Maritime Services) via Internet Protocol (NTRIP) was officially provided, serving users with real-time and free correction products required for PPP [
12,
13,
14]. The emergence of real-time products has promoted the research of PPP in positioning and time transfer. Refs. [
14,
15,
16,
17,
18,
19,
20] demonstrated that the simulated kinematic positioning accuracy using real-time products is better than one decimeter and that time transfer can achieve sub-nanosecond accuracy. However, the NTRIP protocol requires a communication network, making it impossible to be applied in areas with limited network connections. Some navigation systems provide users with PPP services by broadcasting corrections to the navigation ephemeris through satellites to solve the problem of real-time correction products’ dependence on the communication network. The Quasi-Zenith Satellite System (QZSS) uses an L6 signal to provide centimeter-level augmentation services (CLAS) for users in the Japanese area. Currently, the CLAS services support GPS, QZSS, and Galileo systems [
21]. Galileo provides free high-precision PPP services for GPS and Galileo users through E6-B signals [
22]. In August 2020, the China Satellite Navigation Office released the interface control document dealing with the PPP service signal, PPP-B2b. The document points out that BDS-3 uses GEO satellites to provide BDS-3, GPS, GLONASS, and GALILEO with satellite orbit correction, clock correction, and many others, providing decimeter-level positioning accuracy in the kinematic mode for users in the Asia–Pacific region [
23]. However, the PPP-B2b service currently only provides correction products for the BDS-3 and GPS systems.
The PPP-B2b signal broadcasts the I-component and the Q-component but the first three GEO satellites of BDS-3 only broadcast the I-component [
23].
Table 1 summarizes the types of messages defined by the PPP-B2b interface control document [
23]. The user receives the PPP-B2b signal in real time to restore satellite orbit correction, satellite clock correction, and differential code bias, and finally corrects the broadcast ephemeris to obtain precise satellite orbit and clock, achieving decimeter-level positioning accuracy in kinematic mode using PPP. The research on the PPP-B2b product and services is becoming a hotspot. Among them, Tao et al. evaluated the PPP-B2b product using the multi-GNSS Wuhan University (WHU) final product as a reference. Their results show that the satellite orbit error of the PPP-B2b product is 0.1 m in both the BDS-3 and GPS in the radial component, and the error in the along-track and cross-track components is three to four times the radial component, respectively [
24]. Meanwhile, the standard deviation (STD) of satellite clock error for the GPS and BDS-3 PPP-B2b clock product is 0.13 and 0.11 ns [
24]. Xu et al. reported that the accuracy of the BDS-3 satellite orbit corrected by the PPP-B2b product in the radial, along-track, and cross-track directions is 6.8, 33.4, and 36.6 cm, respectively, and the clock product reaches an accuracy of 0.2 ns, improved by about 85.1% compared to the broadcast clock [
25]. Nie et al. define that PPP positioning utilizing PPP-B2b corrections converges after 10 consecutive epochs to an accuracy of better than 0.6 m in the vertical component and better than 0.3 m in the horizontal component. Their results showed that PPP average convergence time is 17.7 min utilizing the PPP-B2b signal [
26]. Positioning accuracy using the PPP-B2b product can reach decimeter-level by Multi-GNSS PPP-B2b in simulated kinematic mode in China [
24,
25,
26]. Meanwhile, PPP-B2b augmentation information availability for GPS and BDS satellites is 91.5% and 97.5%, respectively [
24]. These studies focus on the evaluation of the PPP-B2b product, and the positioning research mainly focuses on the use of B1I/B3I observations for stations within China. There are few studies on PPP-B2b positioning accuracy in static and simulated kinematic modes using the BDS-3 B1C and B2a new signals, and a lack of research on the application of the PPP-B2b product to time transfer.
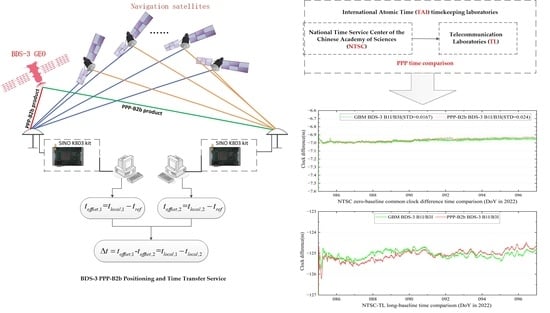
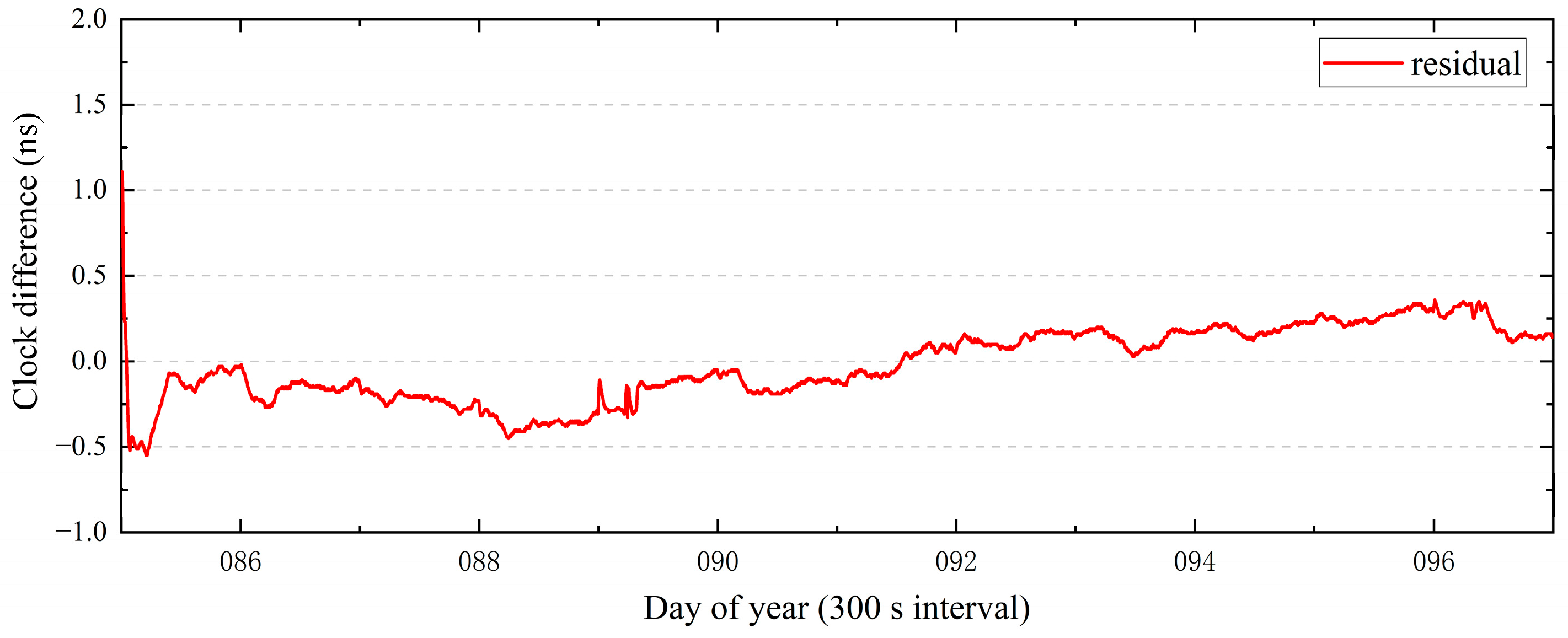
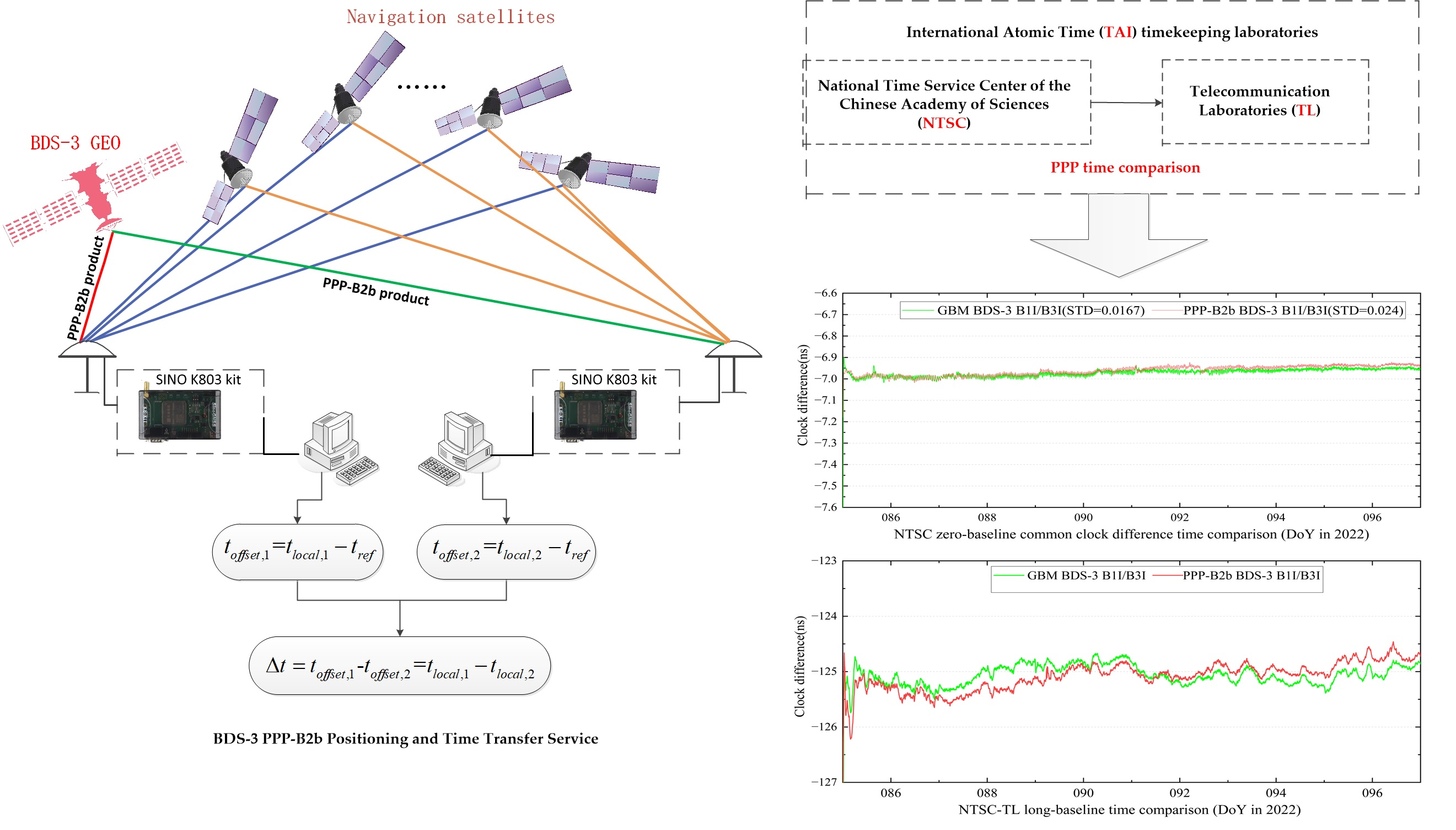
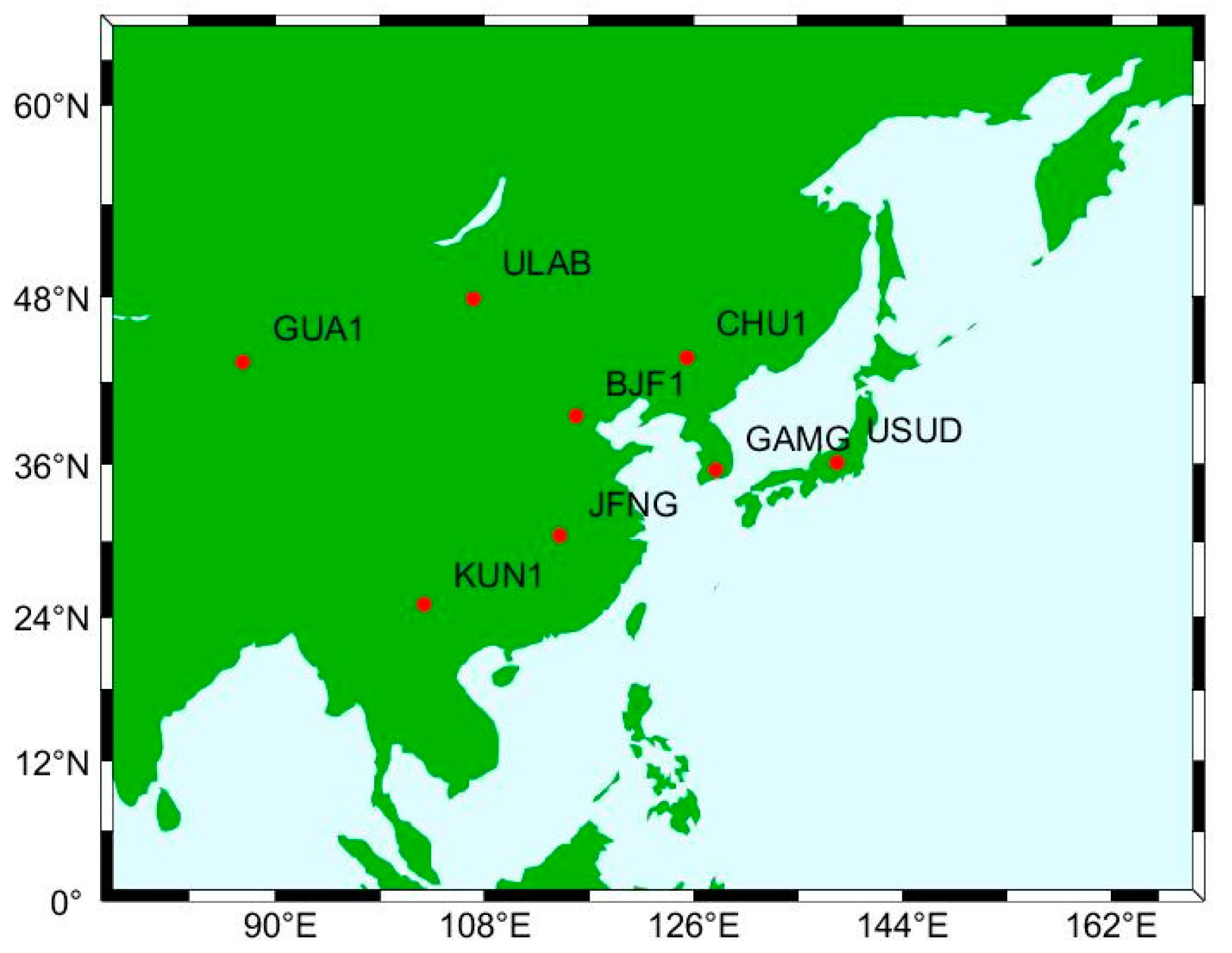
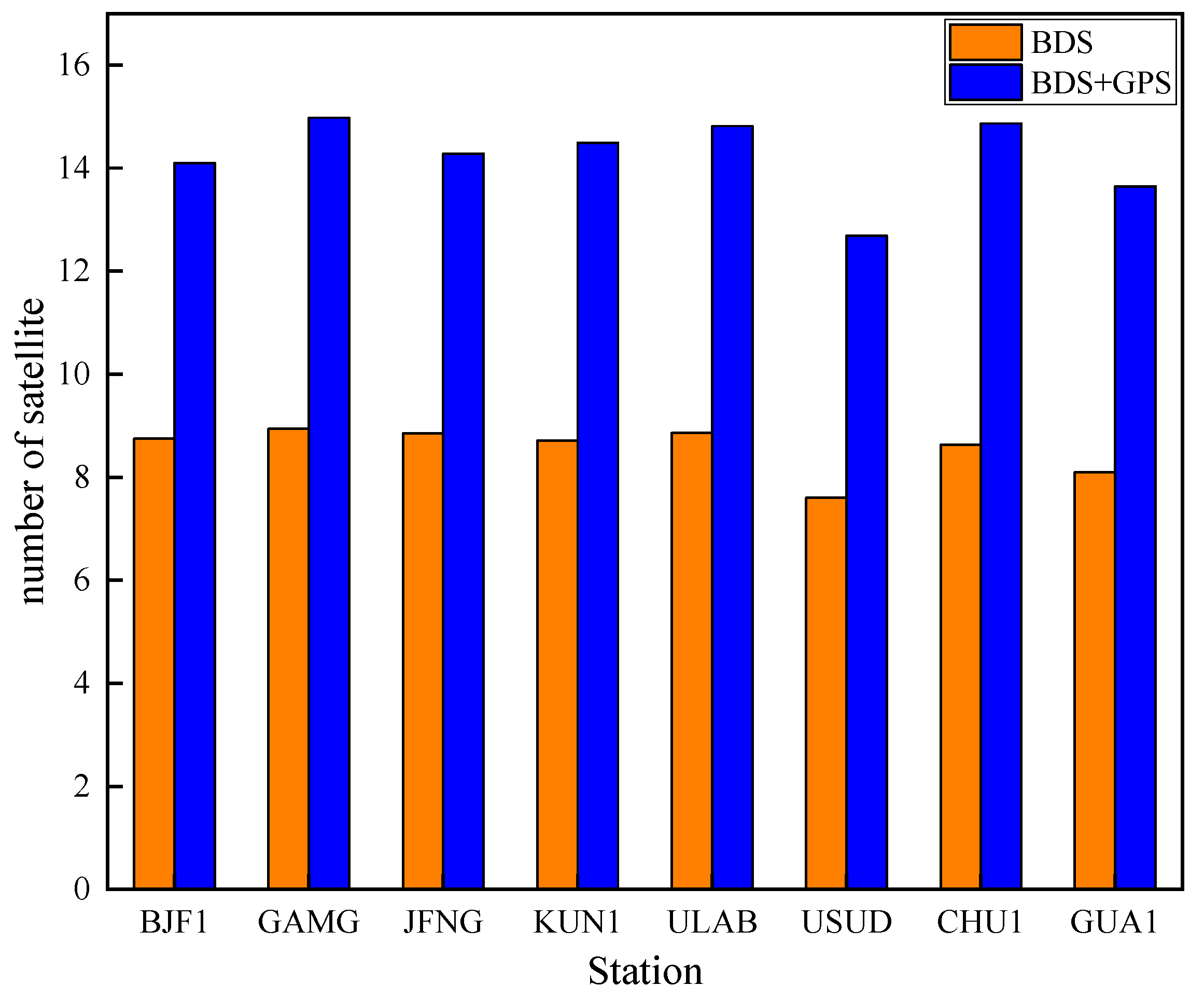
In this contribution, stations with uniform distribution in the Asia–Pacific region were selected, and the daily RMS values of the PPP-B2b positioning errors using BDS B1I/B3I and BDS B1C/B2a were calculated in static and simulated kinematic modes. Meanwhile, the PPP-B2b time comparison of two international atomic time (TAI) timekeeping laboratories in the Asia–Pacific region was studied, including the National Time Service Center of the Chinese Academy of Sciences and the Telecommunication Laboratories. Based on the 10-day observation data of 8 IGS/international GNSS monitoring and assessment system (IGMAS) stations in the Asia–Pacific region from day of year (DoY) 67 to 76 in 2022, the RMS values of the PPP-B2b positioning errors in North, East, and Up (N, E, and U) directions employing four combinations of BDS B1I/B3I + GPS, BDS B1I/B3I, BDS B1C/B2a + GPS, and BDS B1C/B2a were analyzed in static and simulated kinematic modes. In addition, two baseline time links were used to investigate the accuracy and stability of PPP-B2b time comparison, taking the GeoForschungZentrum (GFZ) multi-GNSS final product (GBM) as a reference, including the NTSC zero-baseline common clock difference and NTSC-TL long-baseline. The rest of the article is arranged as follows.
Section 2 introduces the matching strategy of PPP-B2b correction information and the method of using the PPP-B2b product to restore precise satellite orbit and satellite clock; secondly, theories of PPP and PPP time transfer are introduced.
Section 3 predominately covers the experimental data, methodology, experimental results, and analysis discussion.
Section 4 presents several conclusions.
4. Conclusions
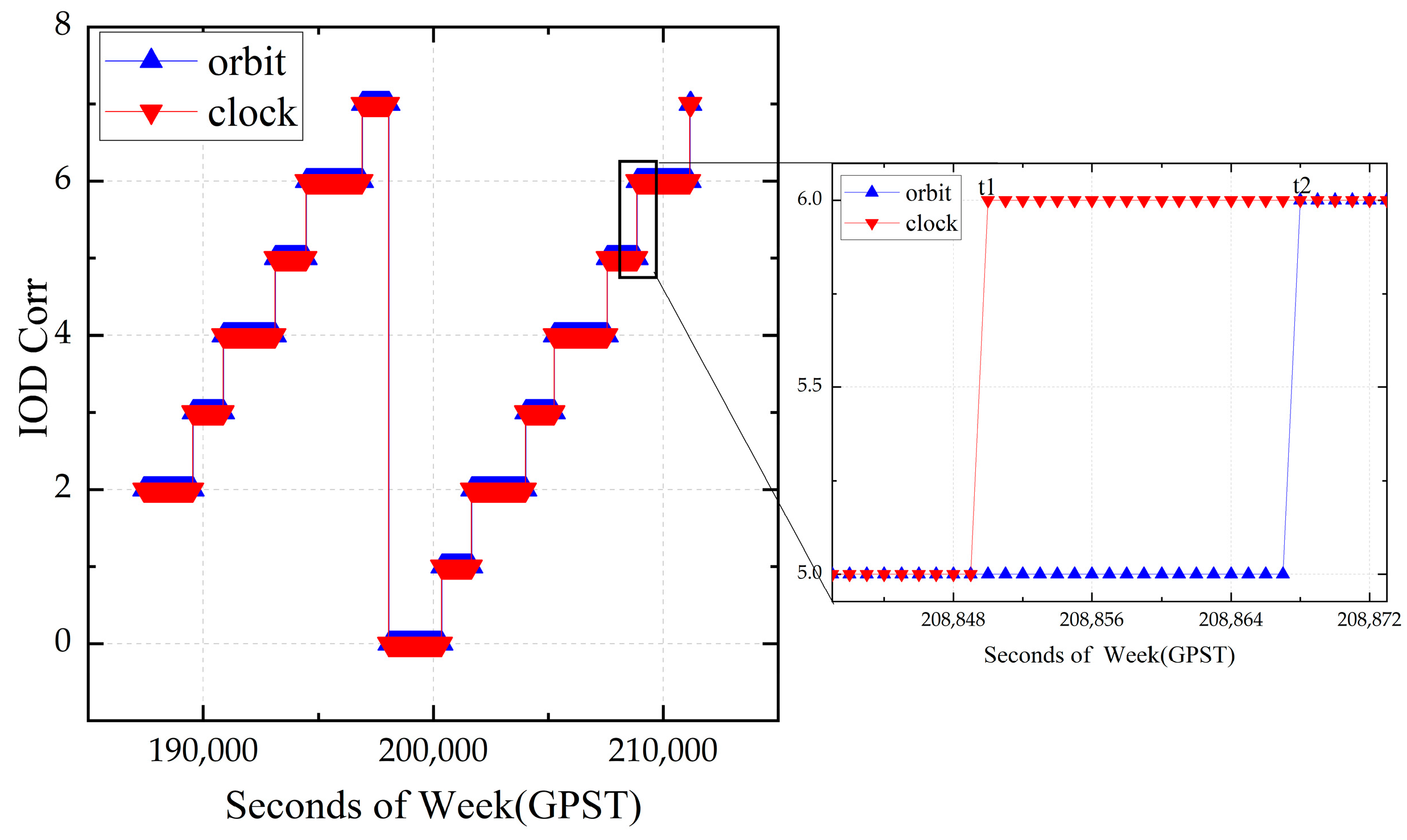
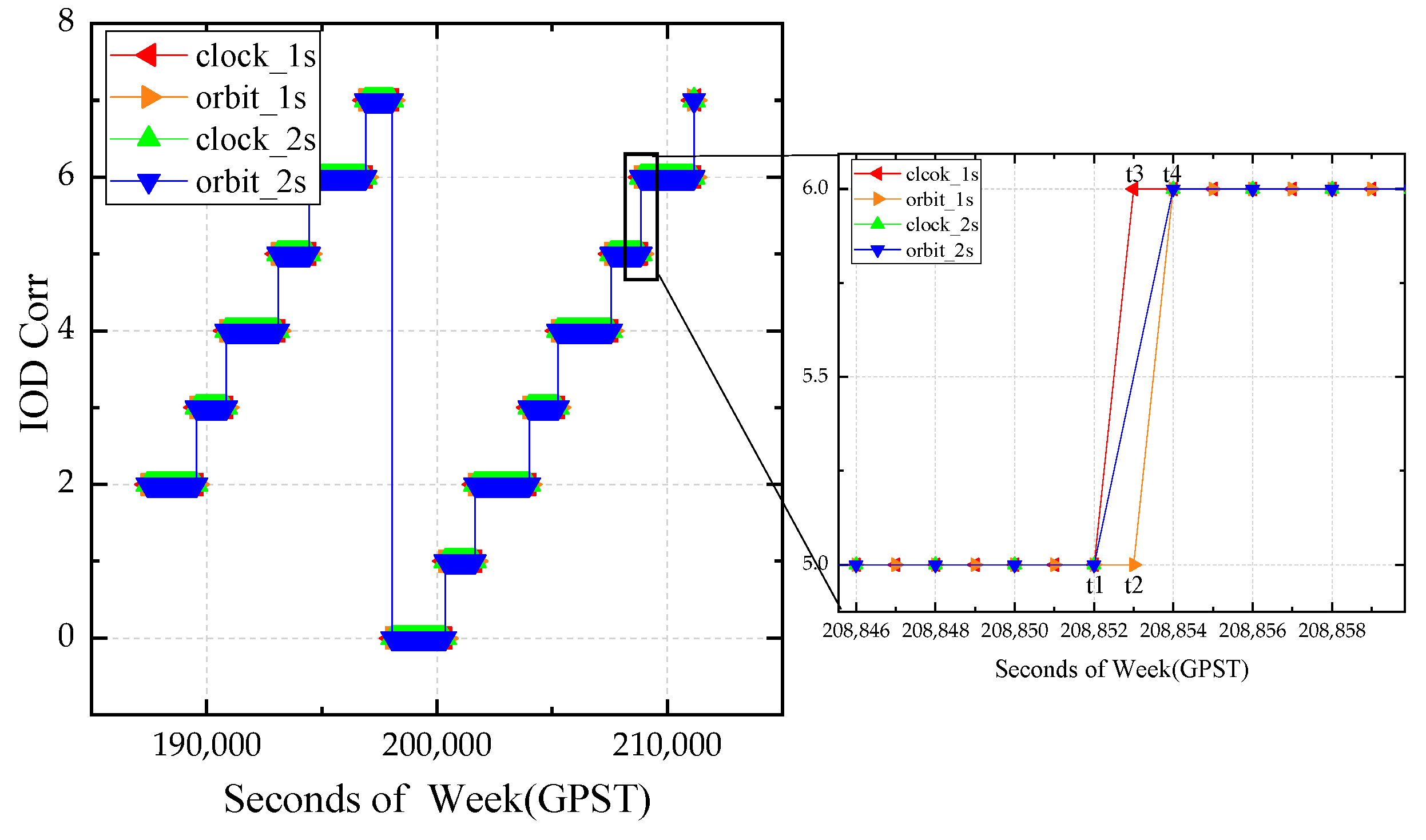
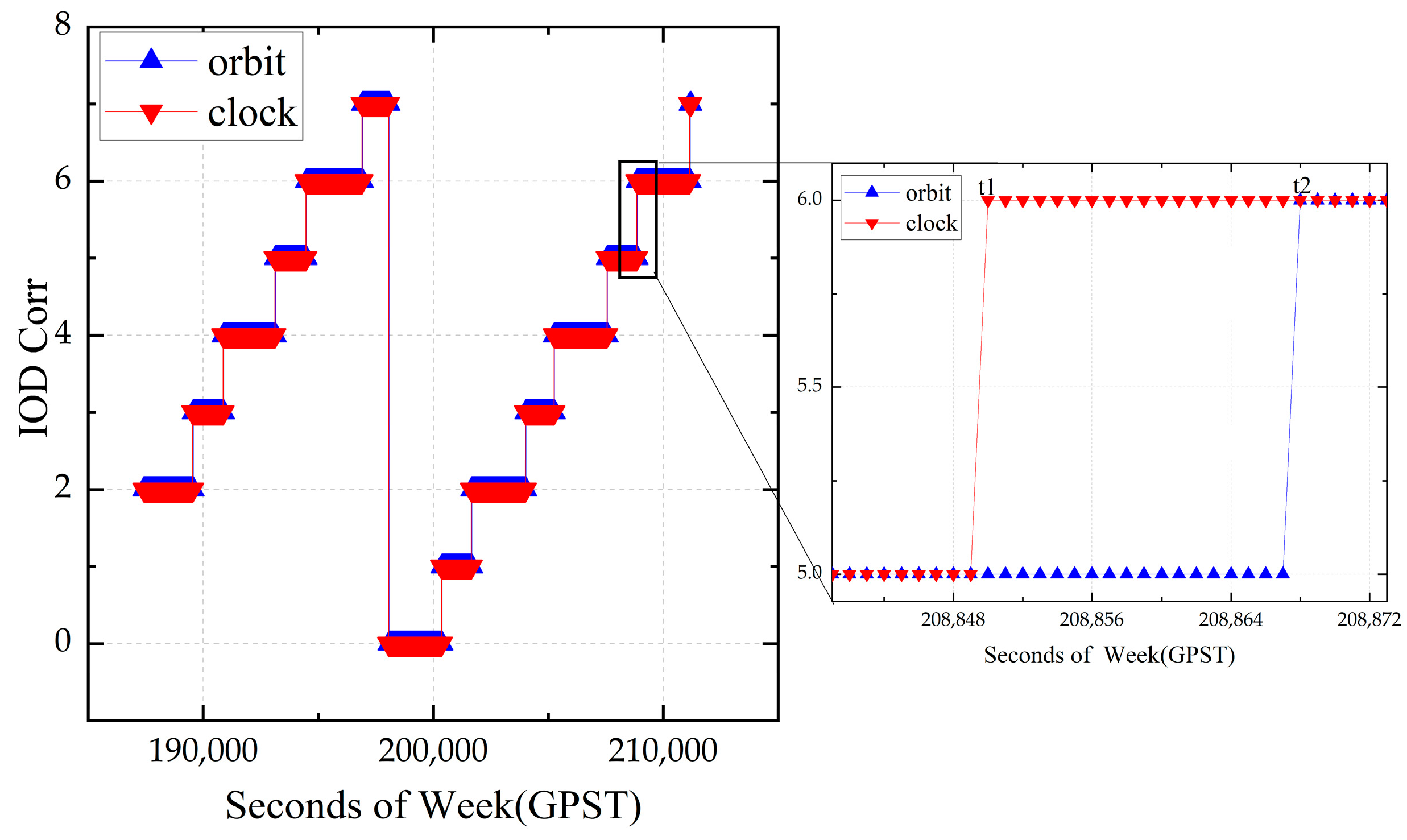
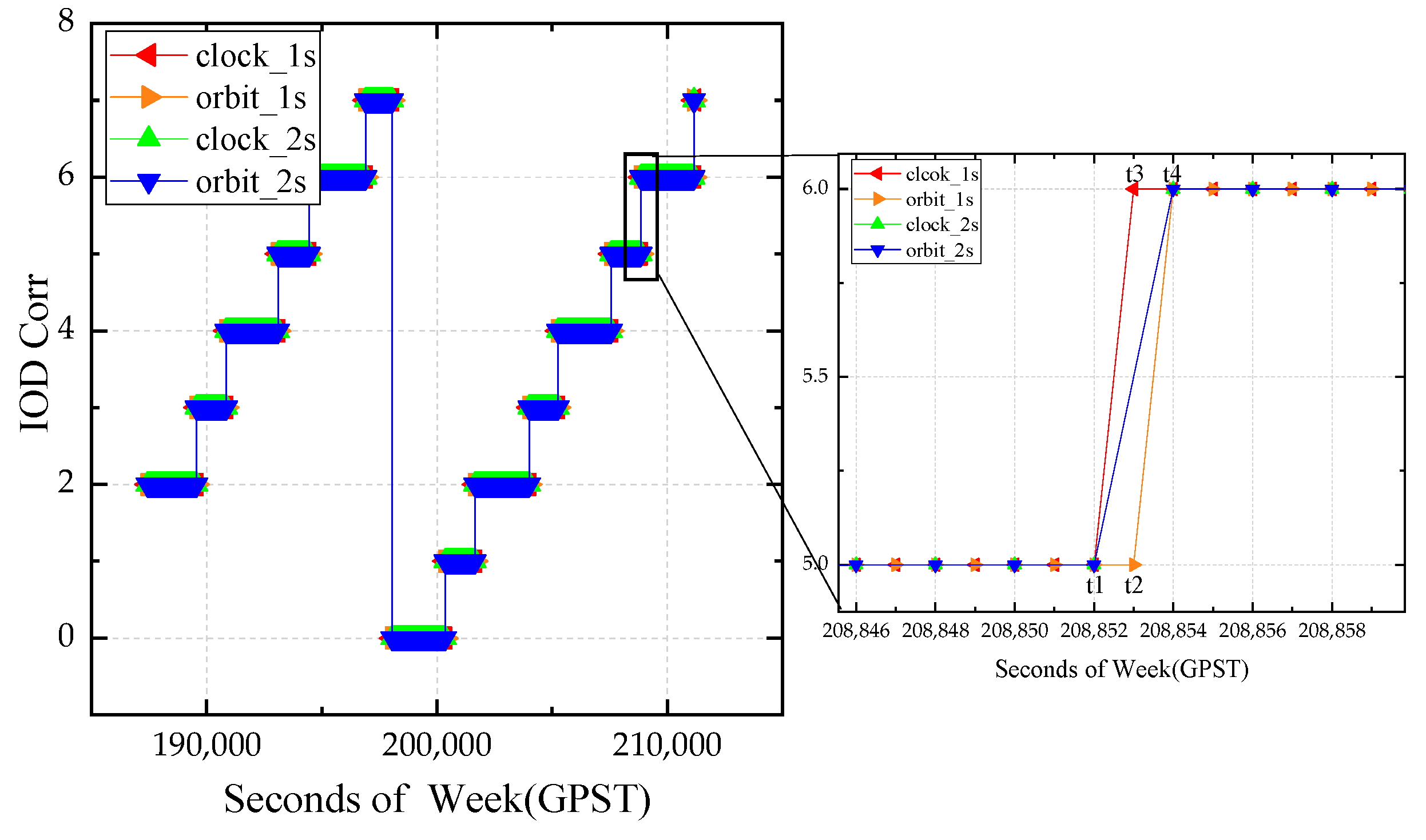
The BDS-3 can provide PPP services to the Asia–Pacific region via GEO satellites following the official announcement of the PPP-B2b signal document. In this contribution, by employing distributed IGS/IGMAS stations in the Asia–Pacific region, a comprehensive analysis of the time transfer and positioning accuracy using the PPP-B2b product was undertaken. Initially, the matching strategy of the PPP-B2b product was discussed. The post-processing observations were updated at the rate of 1 s, and the epoch time field in the PPP-B2b information frame was used as a reference for updating the PPP-B2b correction product. The IOD Corr of the satellite orbit and clock were mismatched when the message type 2 and message type 4 match. Using the time when the receiver gets the PPP-B2b correction message as the reference time, and updating the observation value at 1 s intervals, the mismatch between the PPP-B2b satellite clock and orbit products will be significantly reduced. When the observation update interval is increased to 2 s, the probability of mismatch occurrence is significantly reduced. In this study, the observation value update interval in PPP-B2b positioning was investigated with a time comparison of 30 s.
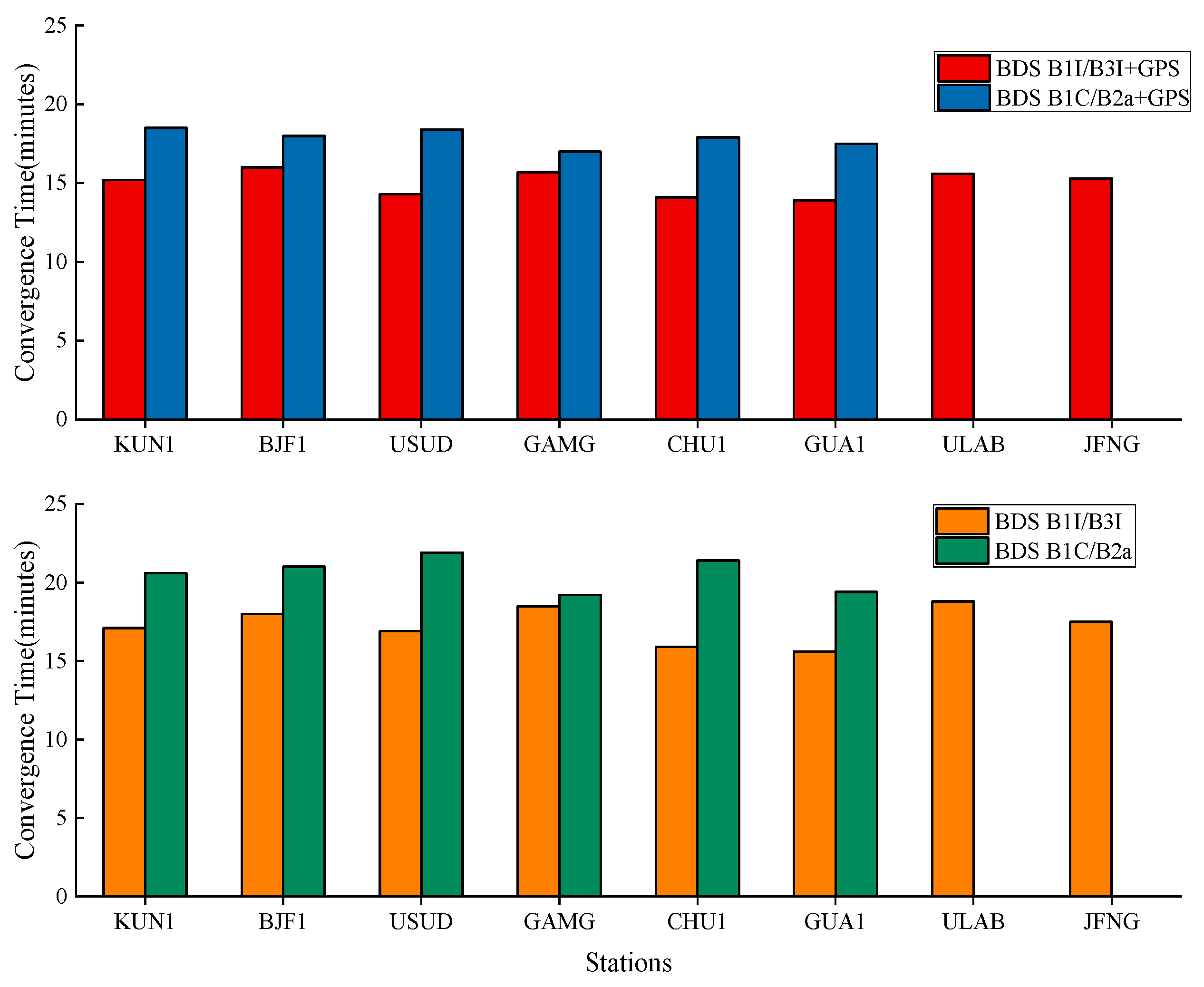
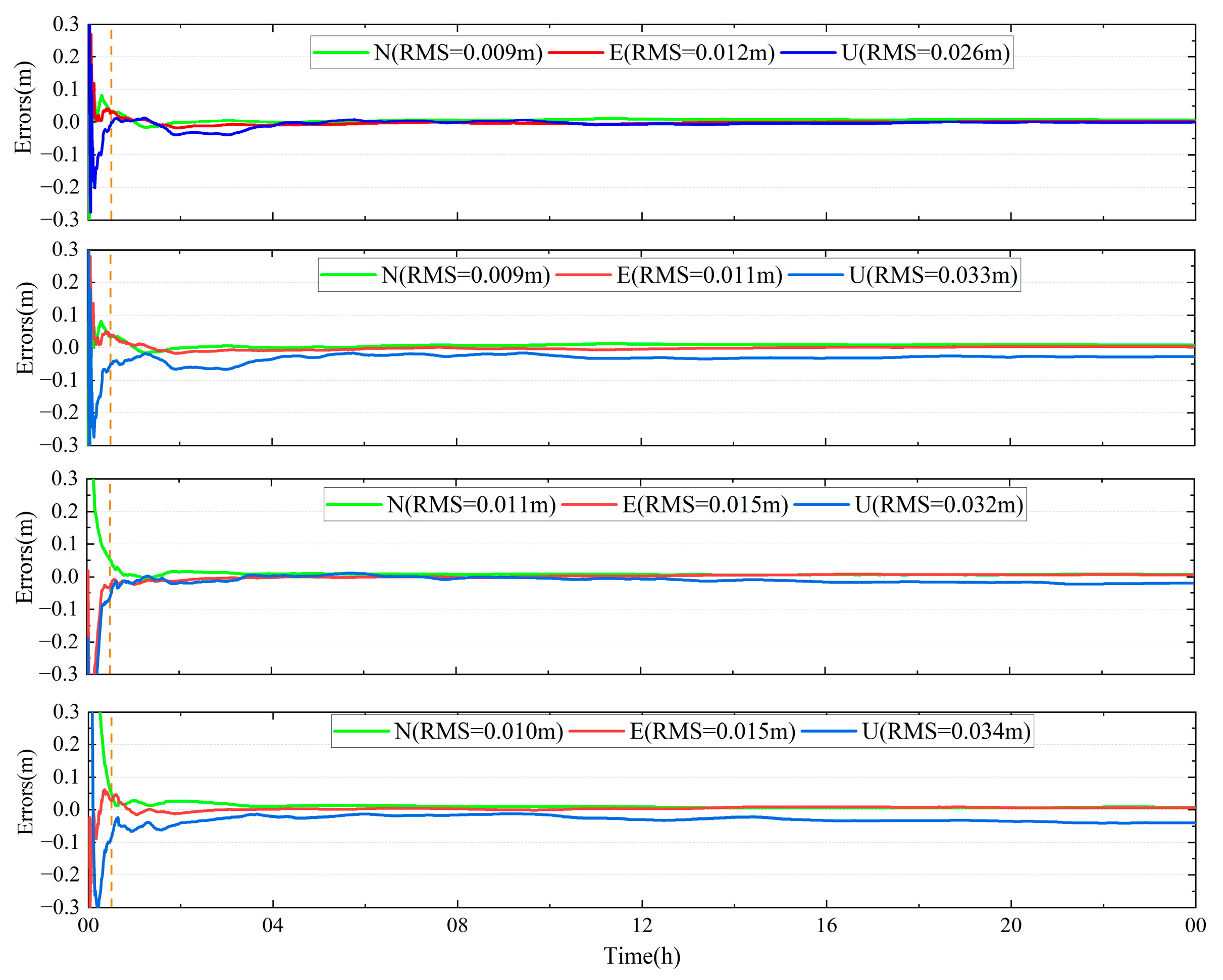
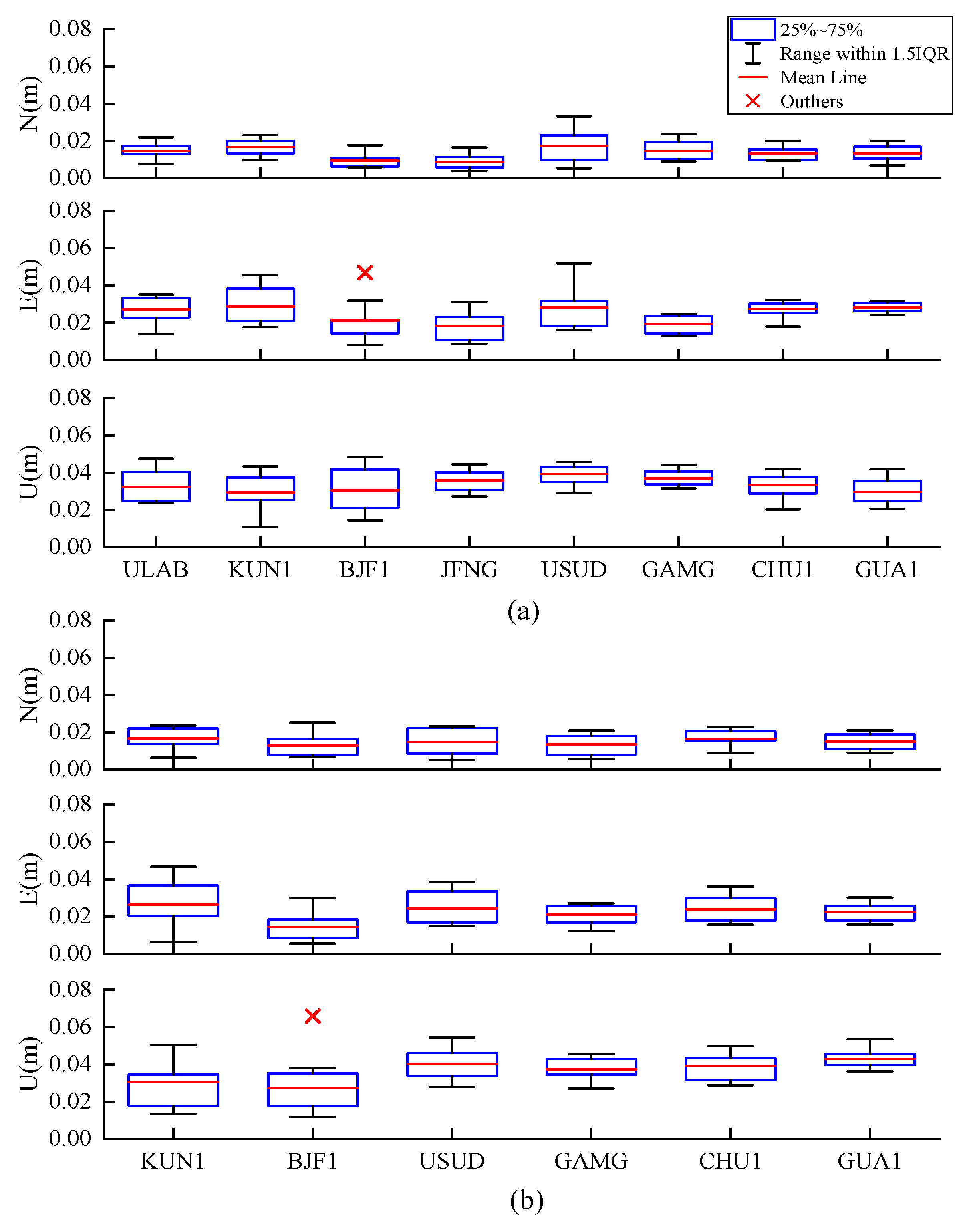
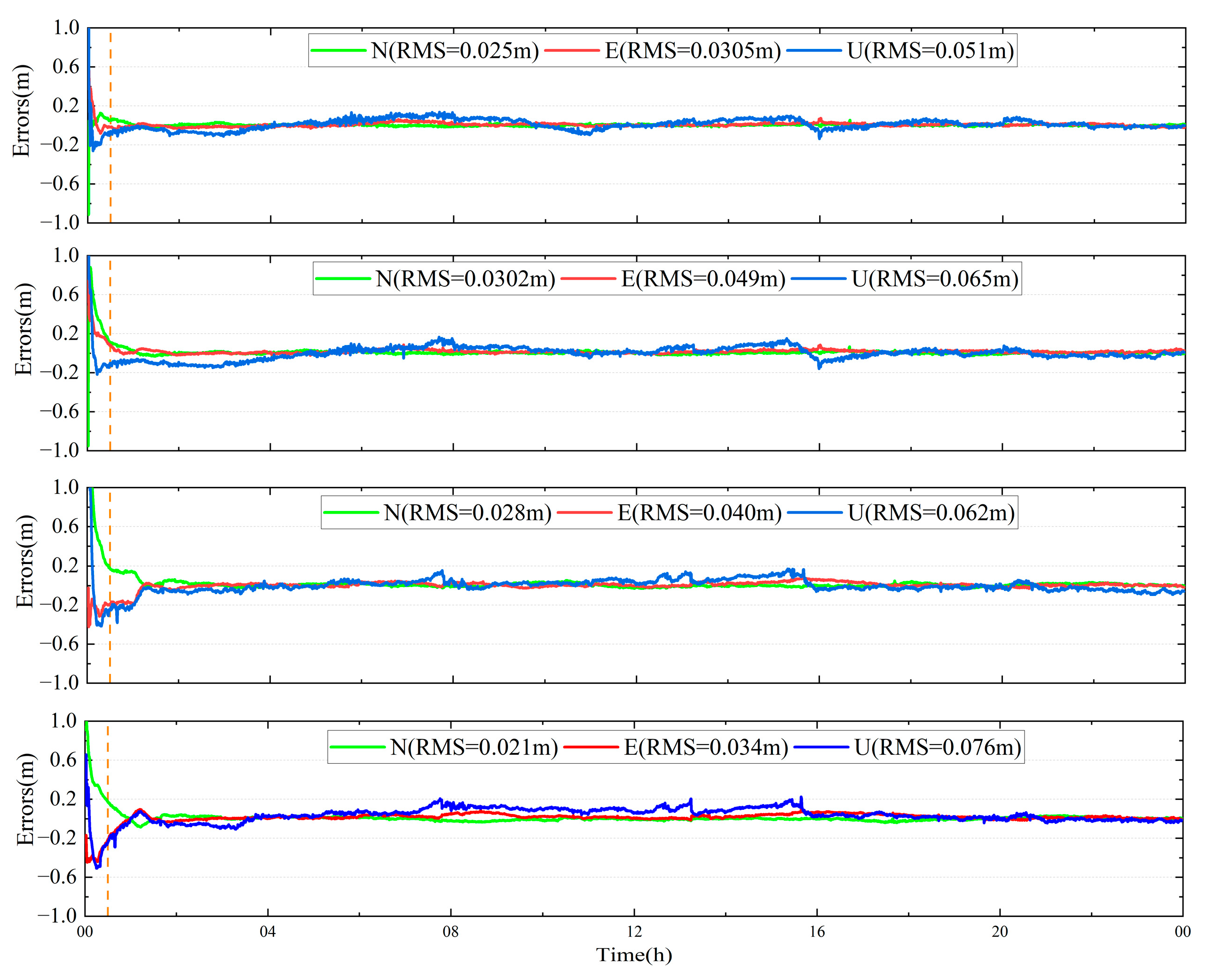
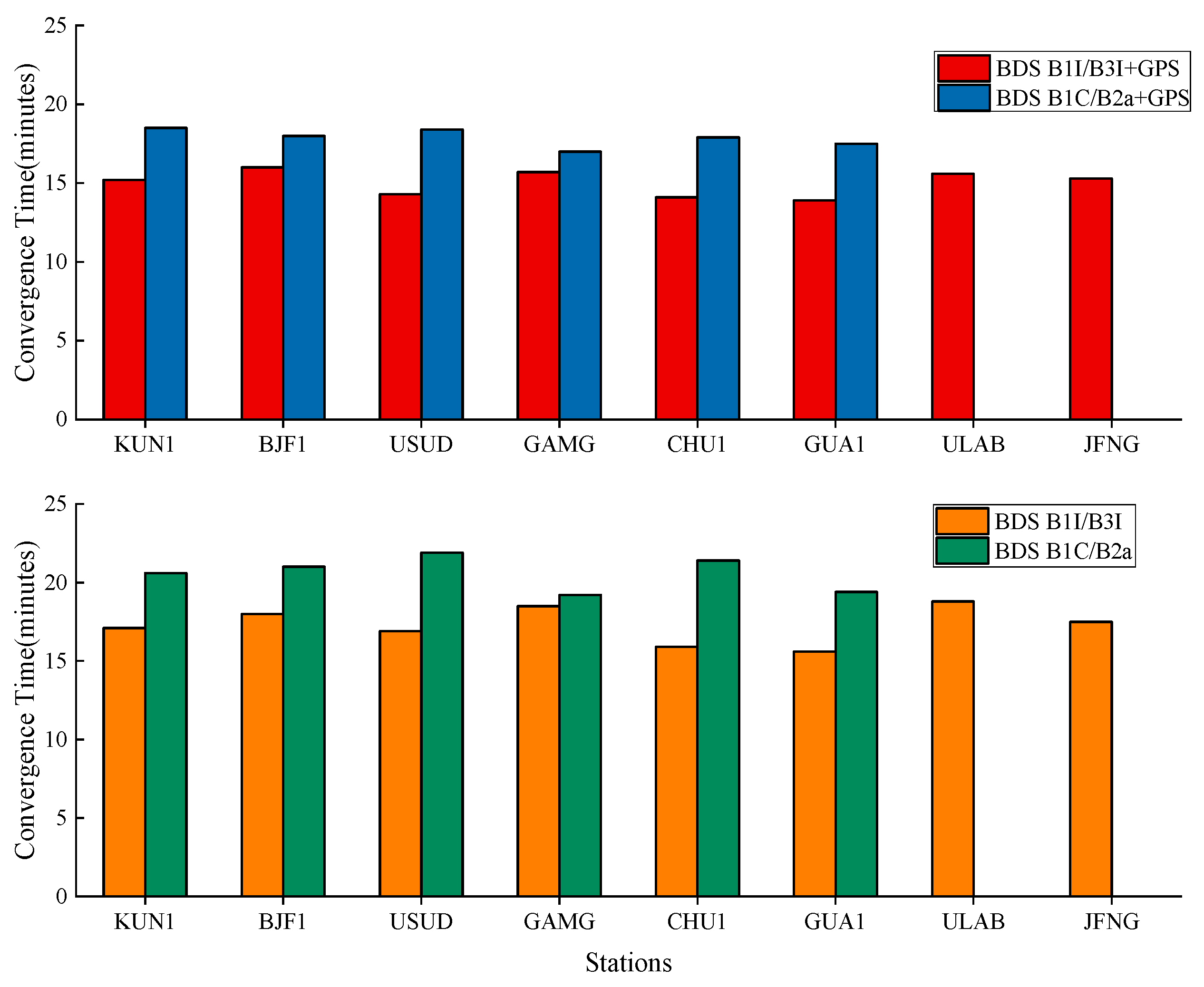
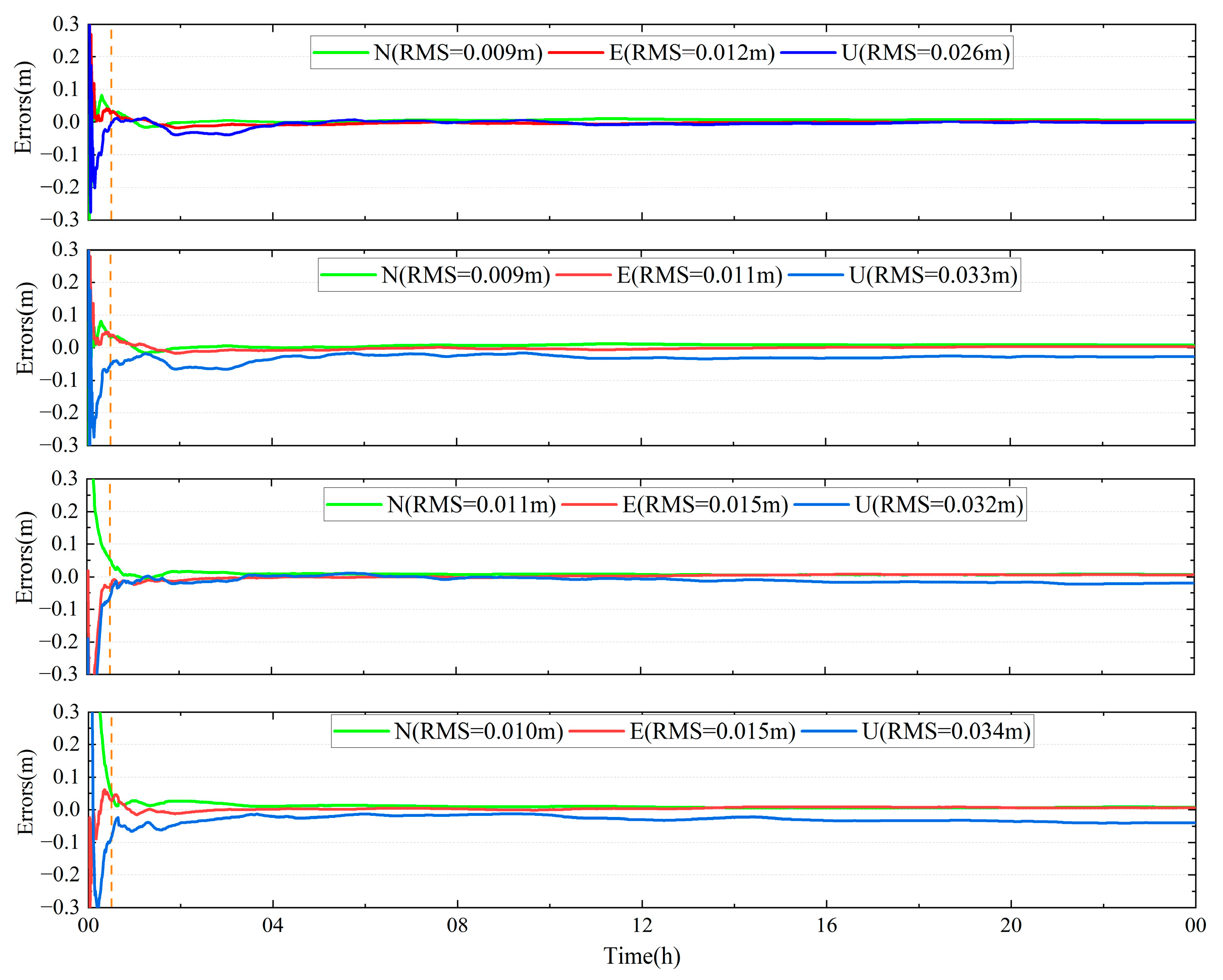
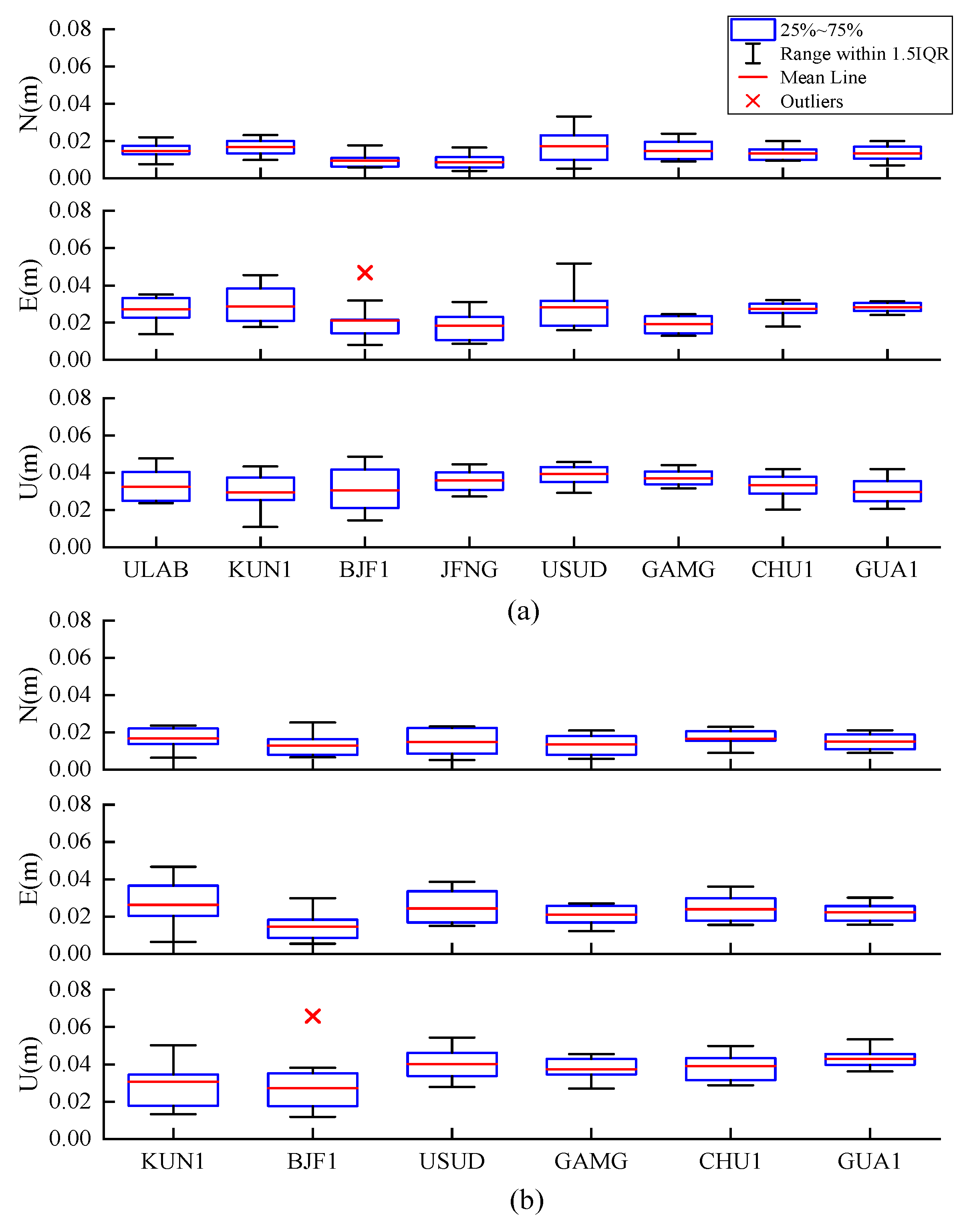
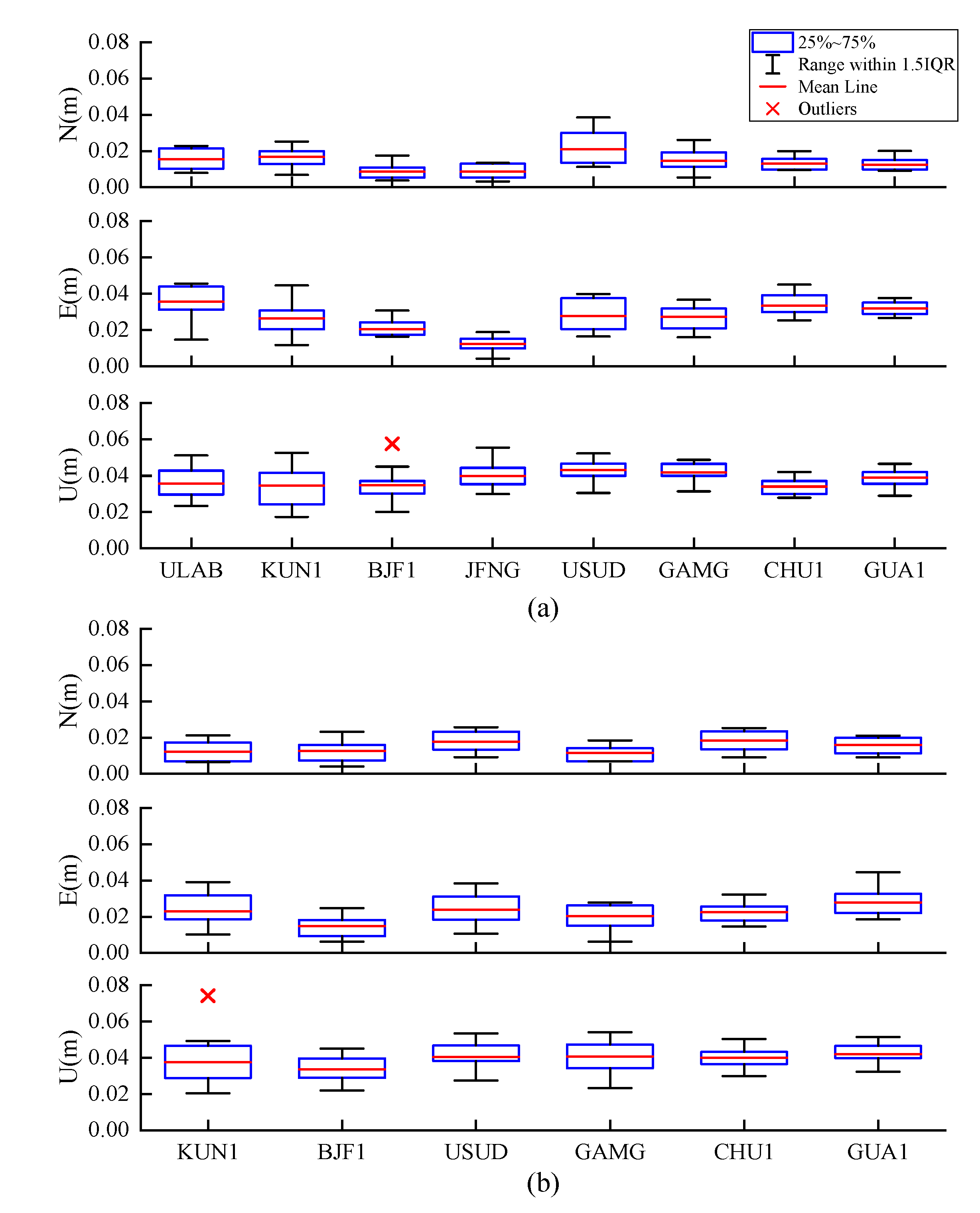
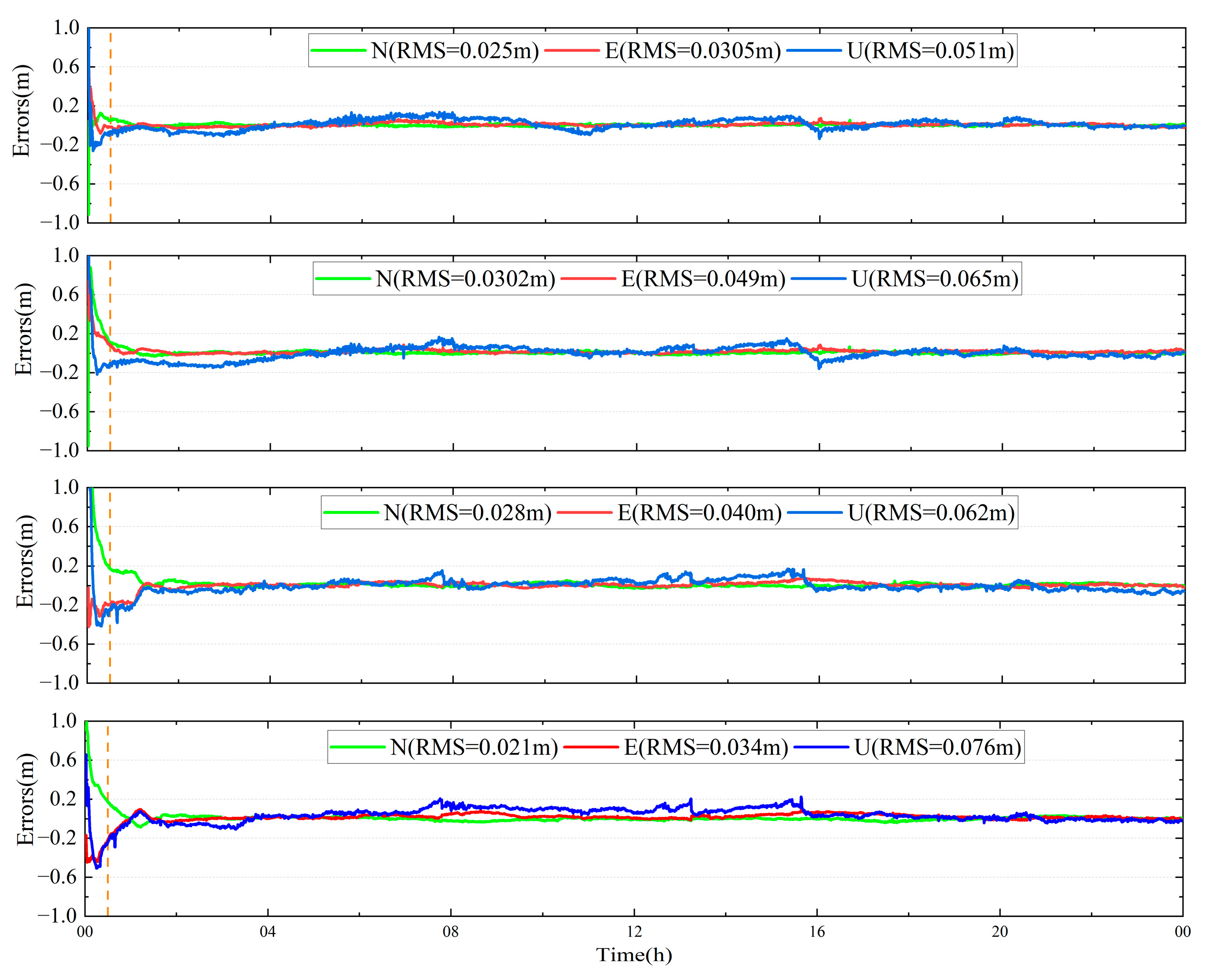
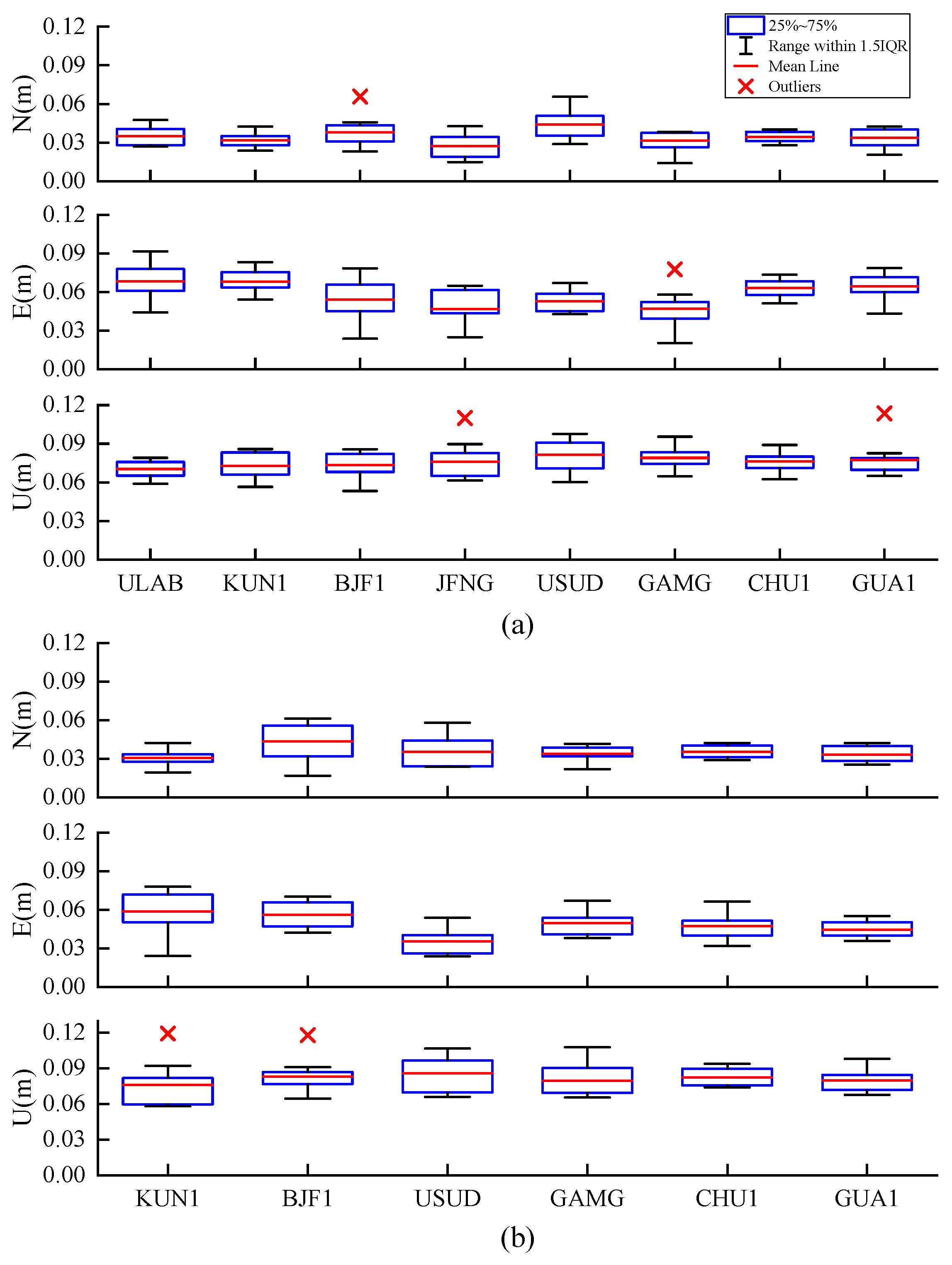
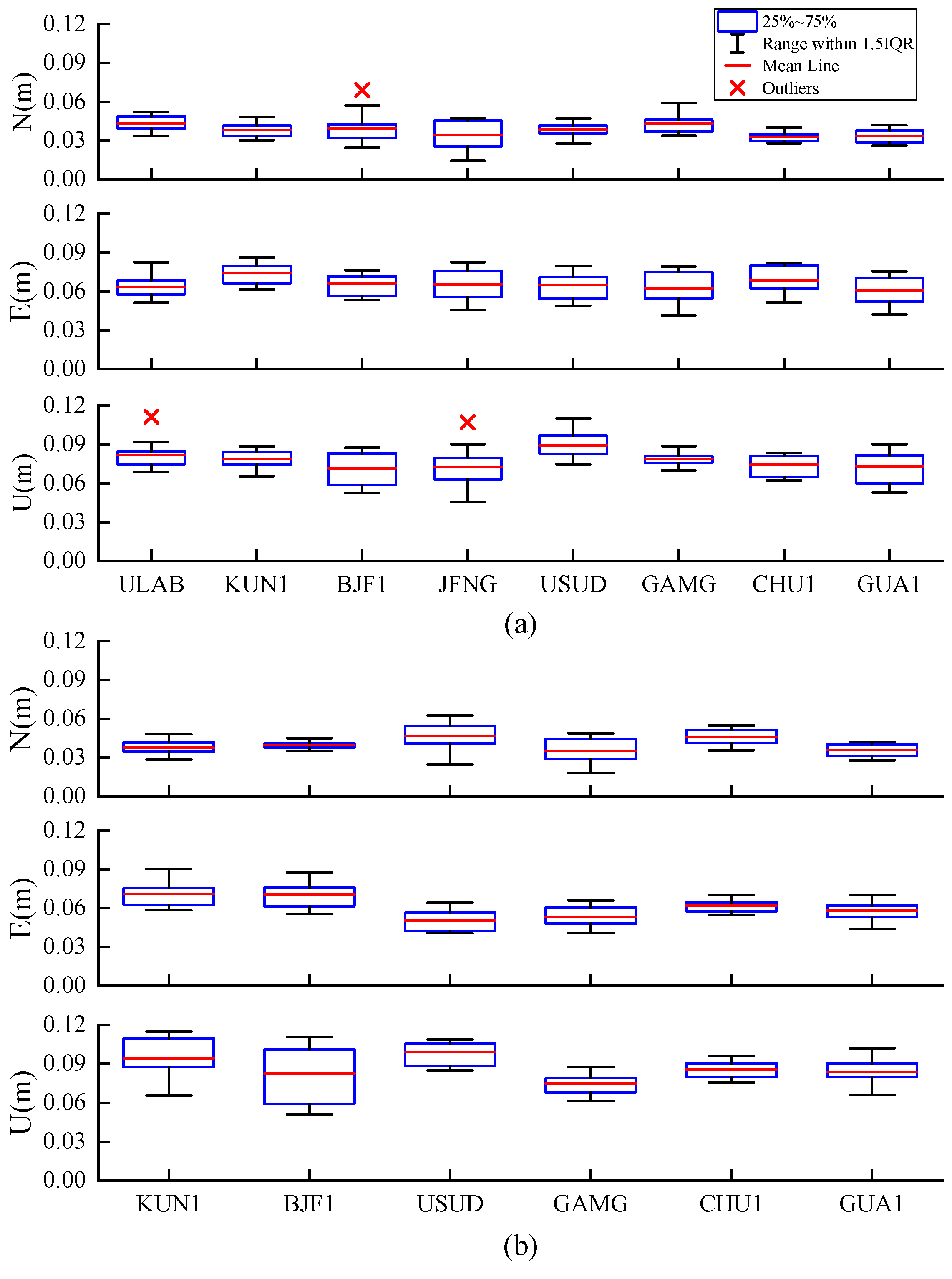
The PPP-B2b positioning study was analyzed using the four IF combinations in static and simulated kinematic mode: BDS B1I/B3I, BDS B1C/B2a, BDS B1I/B3I + GPS, and BDS B1C/B2a + GPS. According to the official document, the average convergence time was analyzed. Average convergence time using the PPP-B2b product with BDS B1I/B3I + GPS, BDS B1C/B2a + GPS, BDS B1I/B3I, BDS B1C/B2a was 15.1/17.8/17.3/20.5 min, respectively. Regarding the PPP-B2b static position results, the average RMS values in the N, E, and U directions of only BDS PPP-B2b were within 1.5/2.7/3.9 cm, respectively, and the positioning accuracies in the E and U directions can be improved to 2.5/3.5 cm using BDS and GPS dual-system. Compared with BDS B1C/B2a, BDS B1I/B3I has comparable positioning accuracy in the N direction, and the accuracy in the U direction can be improved by 3-4 mm. In the PPP-B2b simulated kinematic positioning study, the average RMS values of the positioning errors in the N, E, and U directions for the combination of BDS B1I/B3I + GPS and BDS B1I/B3I were 3.4/5.8/7.6 and 3.8/6.6/7.8 cm, respectively. Meanwhile, the RMS values of the position errors using BDS B1C/B2a + GPS and BDS B1C/B2a were 3.6/4.9/8.1 and 4/6.1/8.5 cm, respectively. The results show that (1) the PPP-B2b positioning accuracy using B1I/B3I and B1C/B2a can approach centimeter-level in the static mode and decimeter-level in the simulated kinematic mode; and (2) compared with B1I/B3I IF combination, the positioning accuracy is improved in the E direction but reduced in the U direction at millimeter-level.
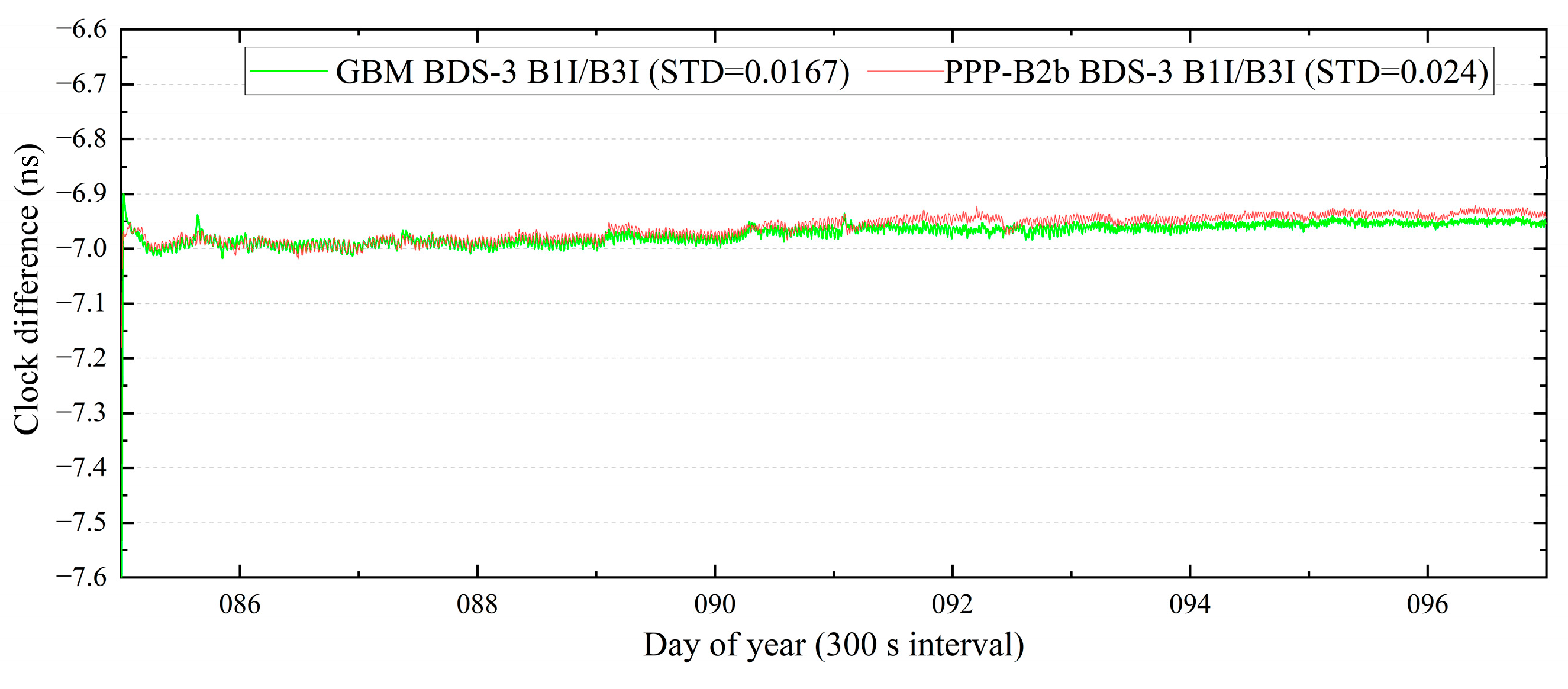
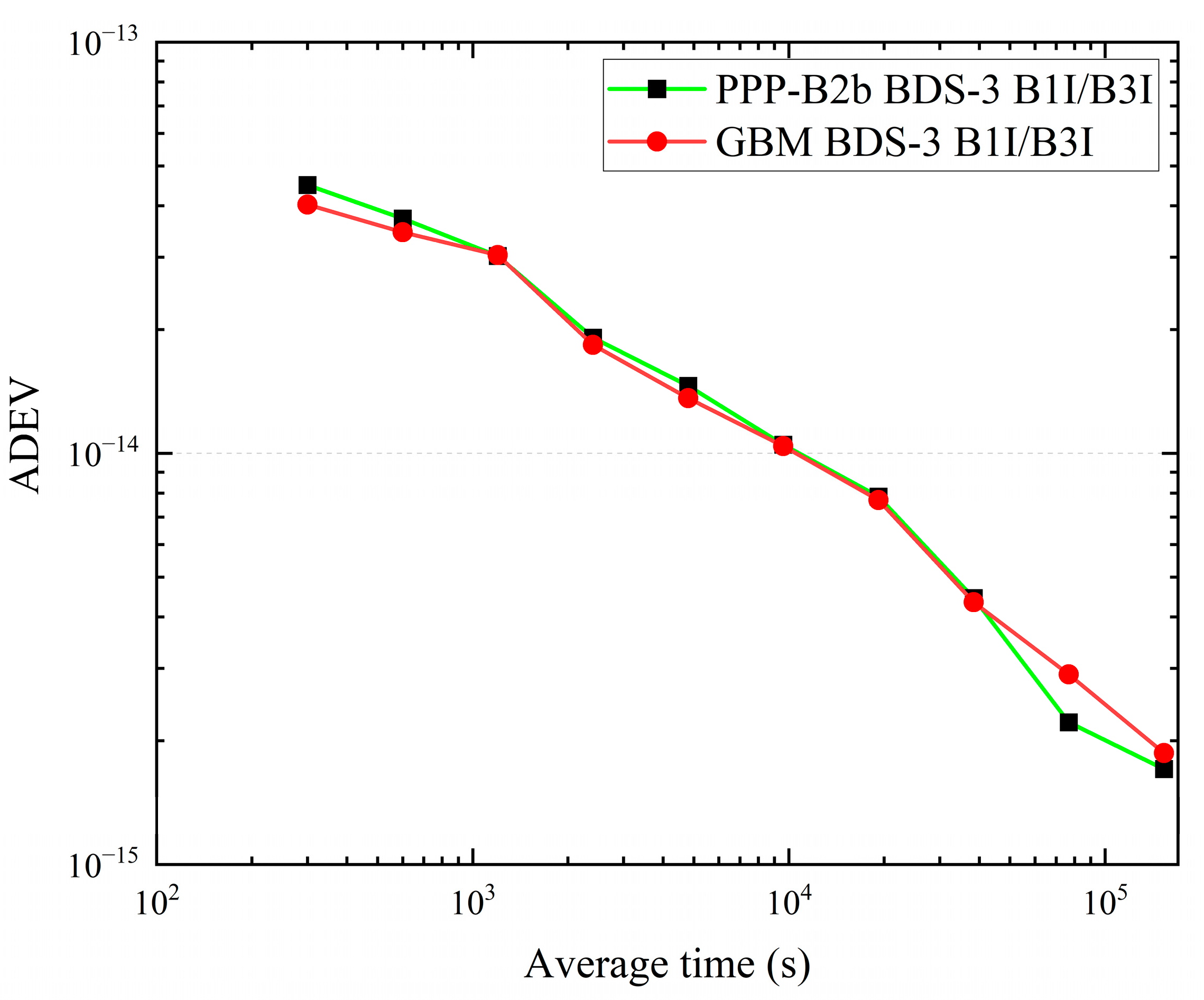
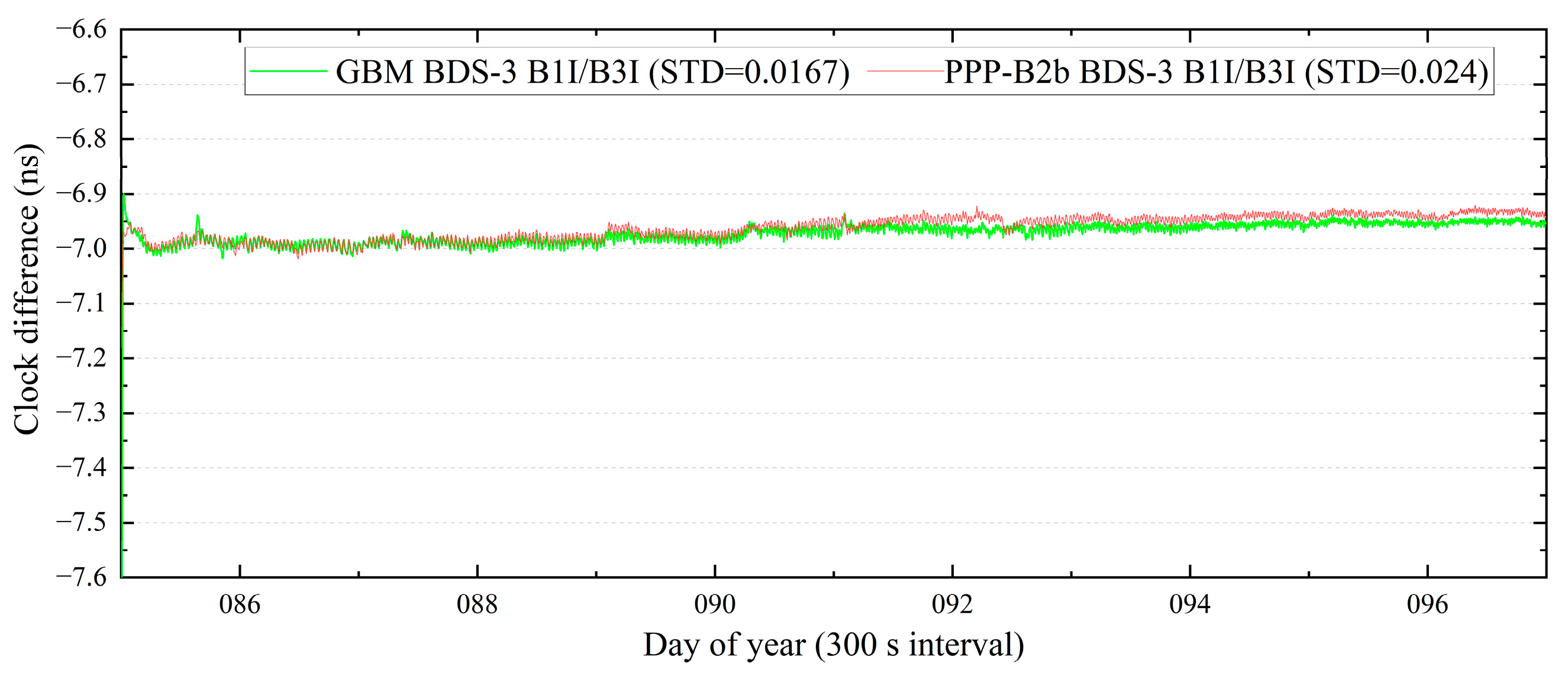
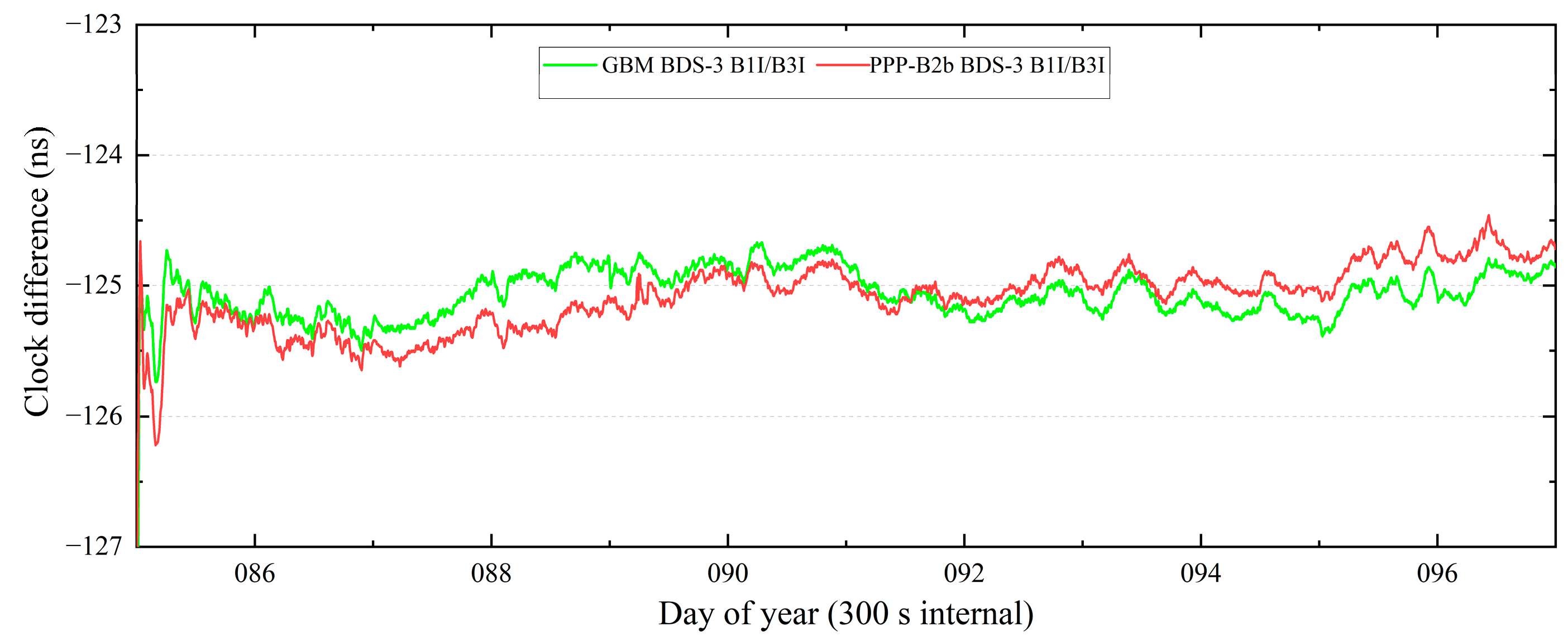
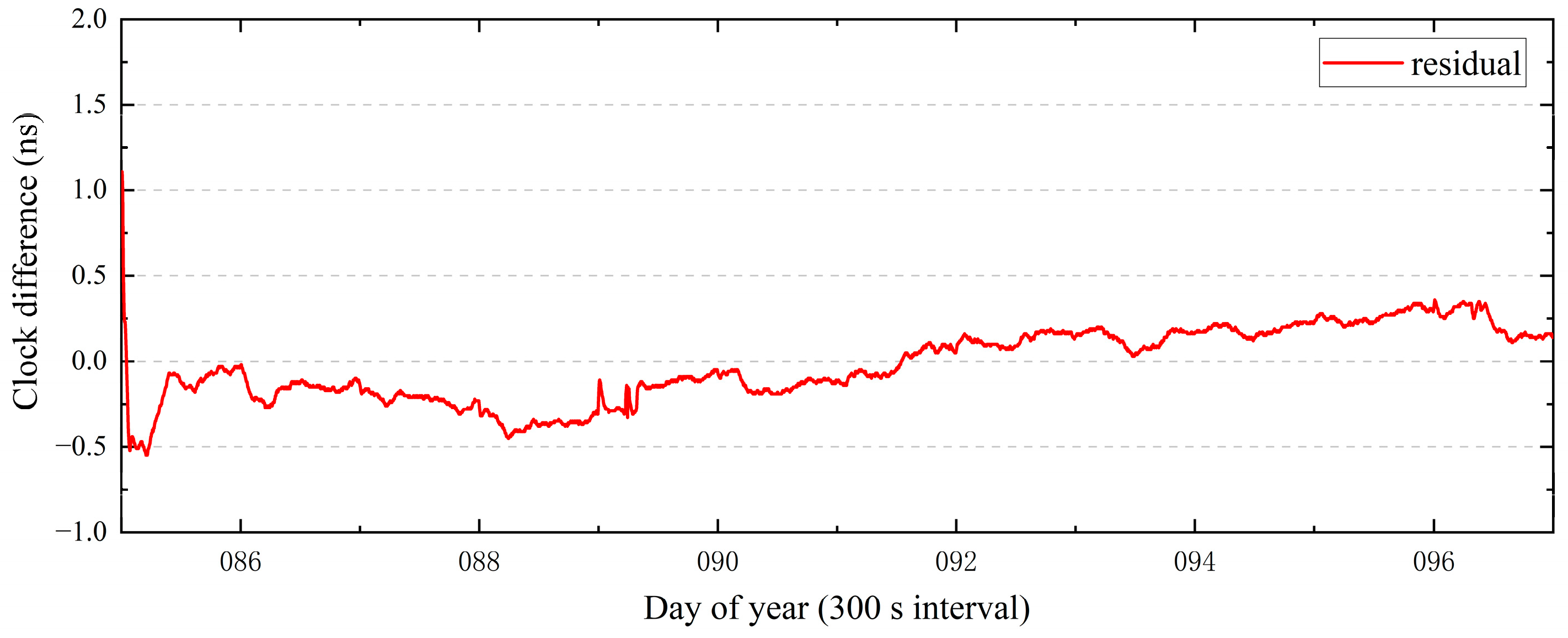
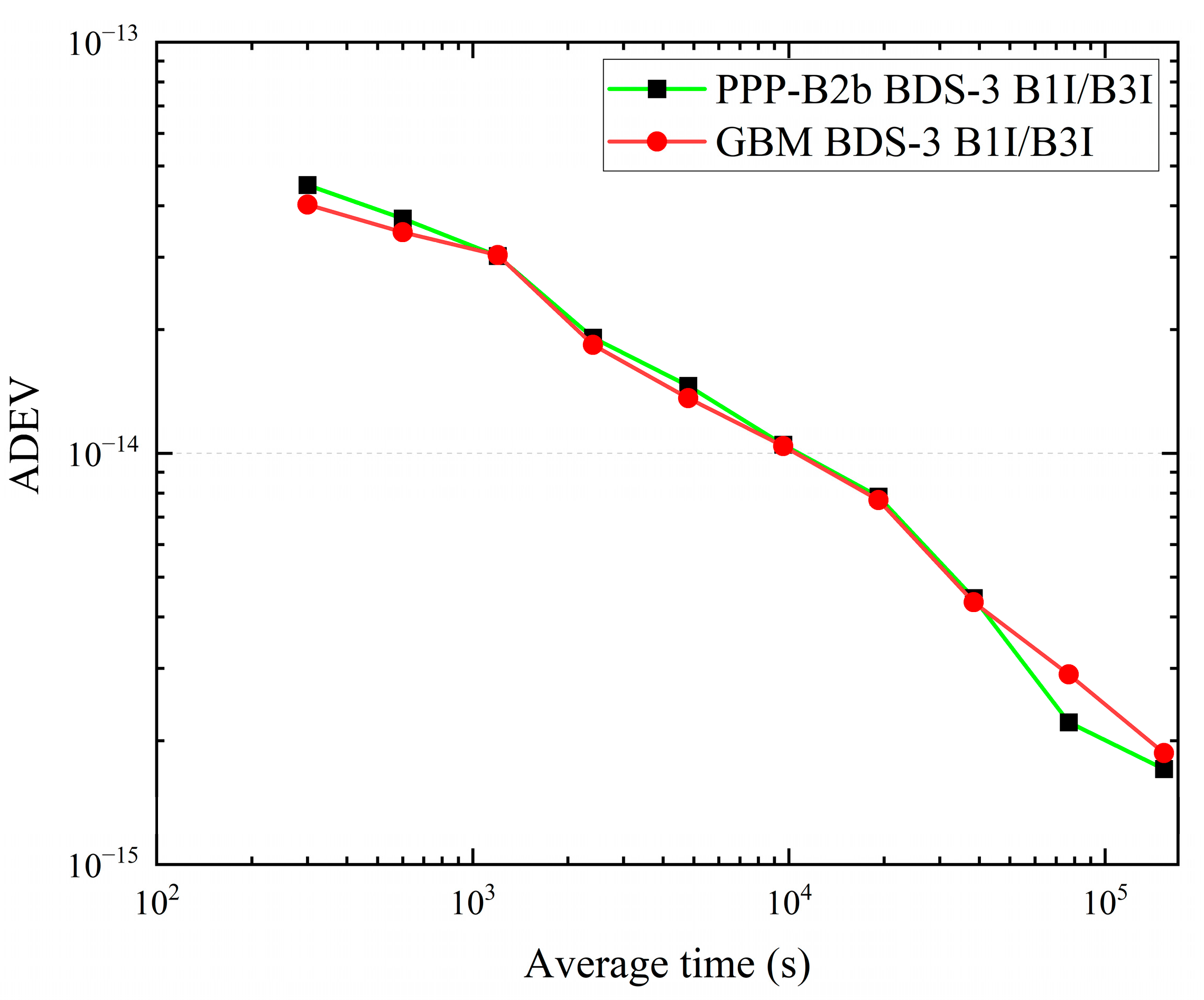
In the PPP-B2b time transfer study, observations of NTSC and TL time laboratories in the Asia–Pacific region involved in maintaining TAI were used. The zero-baseline CCD was used to evaluate the uncertainty of receiver noise level and time comparison using precise products. The results show that (1) the zero baseline CCD time comparison noise level using the GBM product and the PPP-B2b product is within the fluctuation range of 0.1 ns, respectively; (2) the long-baseline time comparison difference between results using the PPP-B2b product and the GBM product is within the range of ±0.5 ns; and (3) according to the Allan’s calculations, the time comparison of the two products exhibits consistent stability.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}