
RETRACTED: Robot Path Planning Method Based on Indoor Spacetime Grid Model
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Indoor Spacetime Grid Model
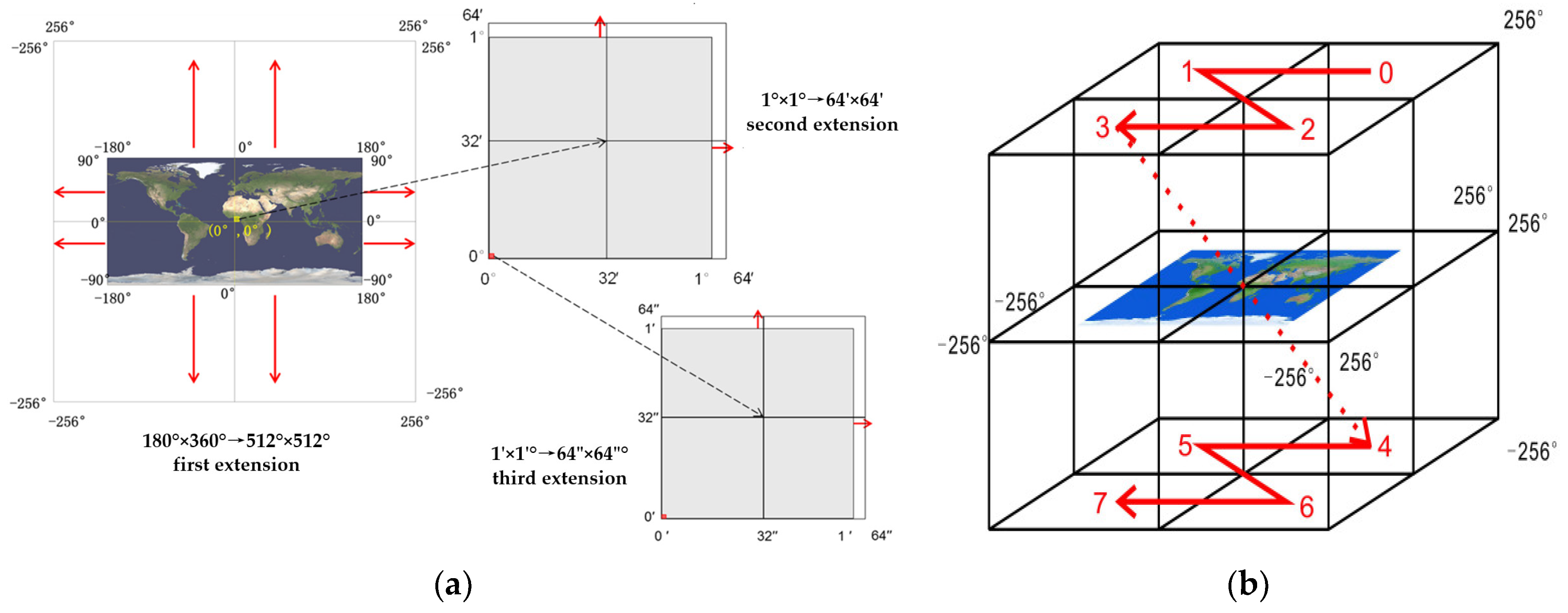
2.1.1. Indoor Space Division Framework
2.1.2. Indoor Time Division Framework
2.2. Spacetime Computation of Indoor Spacetime Grid
2.2.1. Space Computation of Indoor Spacetime Grid
- The spatial grid displacement method
- The spatial neighborhood calculation method
- The spatial parent grid and subgrid coding calculation method
| Algorithm 1: Subgrid Coding Algorithm. |
| Require: Input the octal one-dimensional grid code |
| Ensure: the set of subgrid codes for this grid 1: Set to be an empty array, 2: 3: 4: Add to 5: 6: end while 7: Return the subgrid coding set |
- The spatial distance calculation method
2.2.2. Time Computation of Indoor Spacetime Grid
- The displacement operation method of time coding
| Algorithm 2: Algorithm of positive unit time displacement. |
| Require: Decimal integer time encoding Ensure: The time code corresponding to the next adjacent time domain of the time code 1: 2: 3: 4: 5: 6: if then 7: The time code is outside its own time coverage, return NULL 8: end if 9: 10: return |
| Algorithm 3: Algorithm of negative unit time displacement. |
| Require: Decimal integer time encoding Ensure: The time code corresponding to the last adjacent time domain of the time code 1: 2: if then 3: The time code is outside its own time coverage, return NULL 4: end if 5: if then 6: 7: end if 8: 9: if then 10: 11: end if 12: 13: if then 14: 15: end if 16: 17: 18: 19: return |
- The neighborhood query method of time coding
| Algorithm 4: The calculation method of unit time neighborhood. |
| Require: Input the time code at the Ensure: the set of neighborhood codes for this time code 1: Perform a positive displacement of by one unit and obtain the time code , add to the set 2: Perform a positive displacement of by one unit and obtain the time code , add to the set 3: Return time-encoded set |
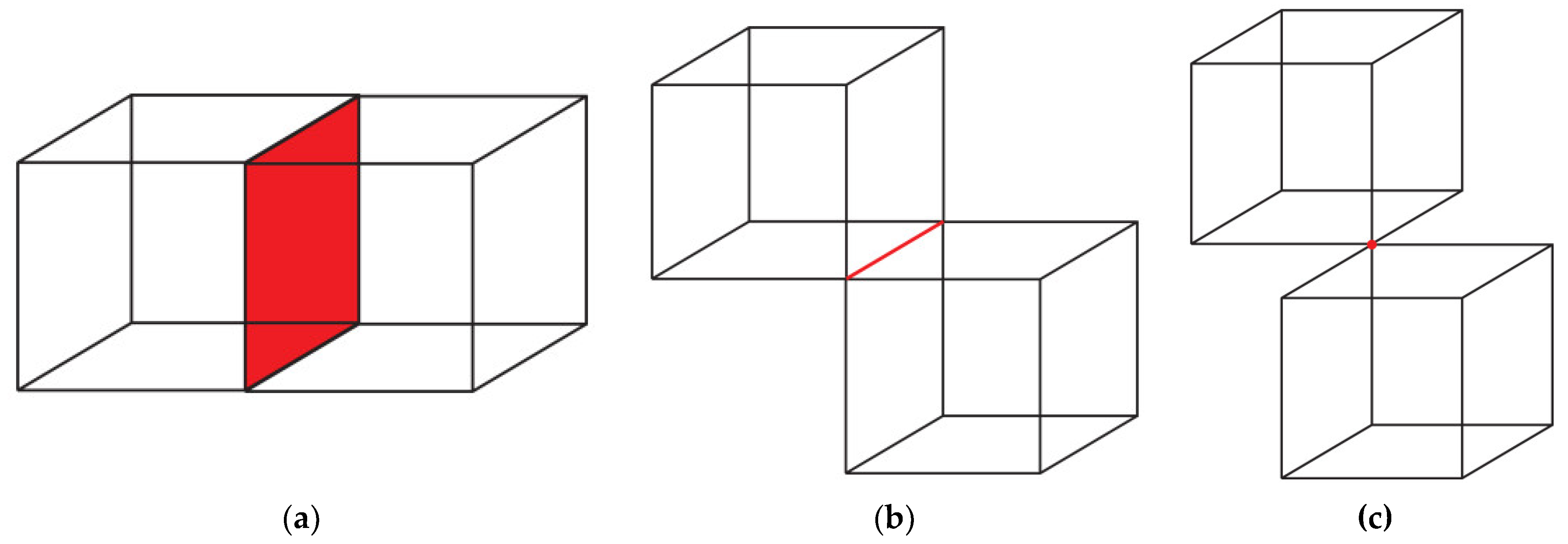
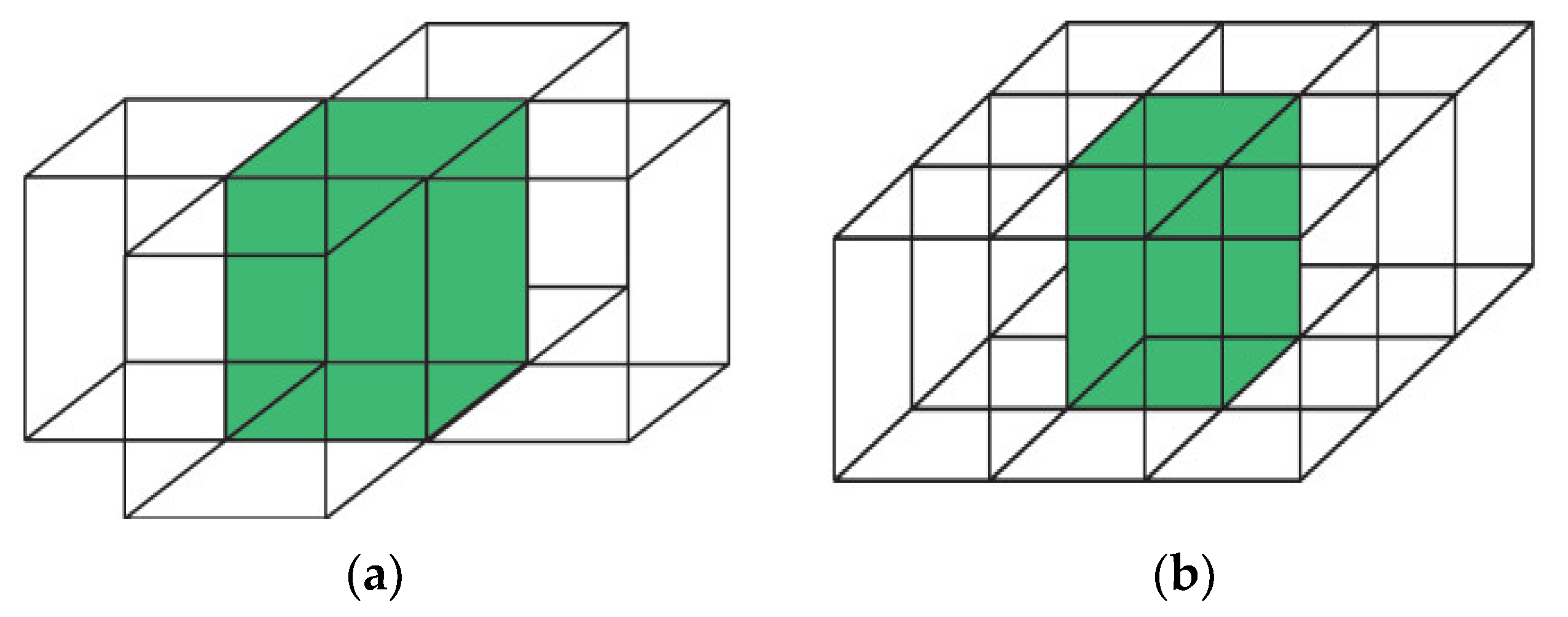
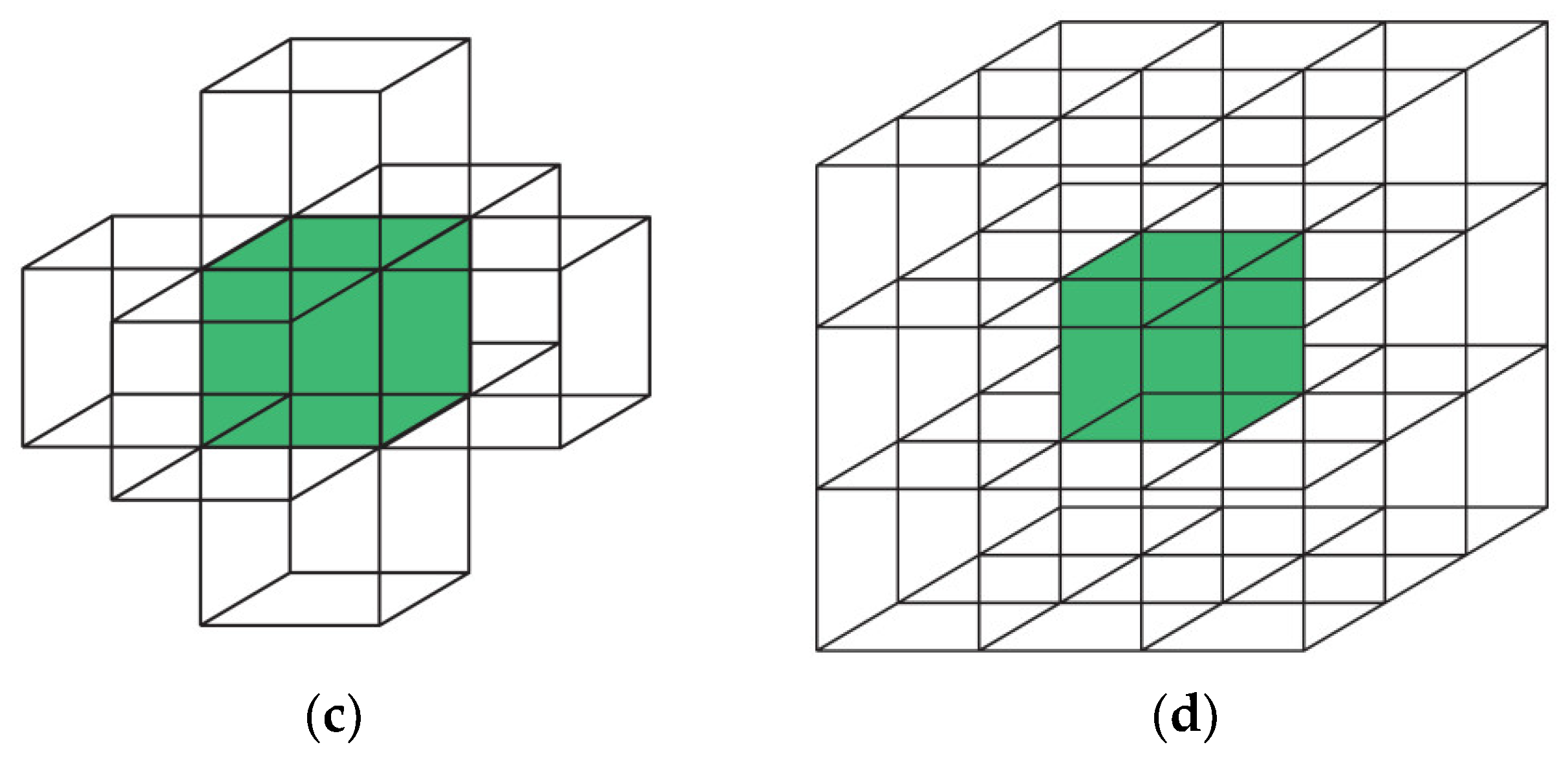
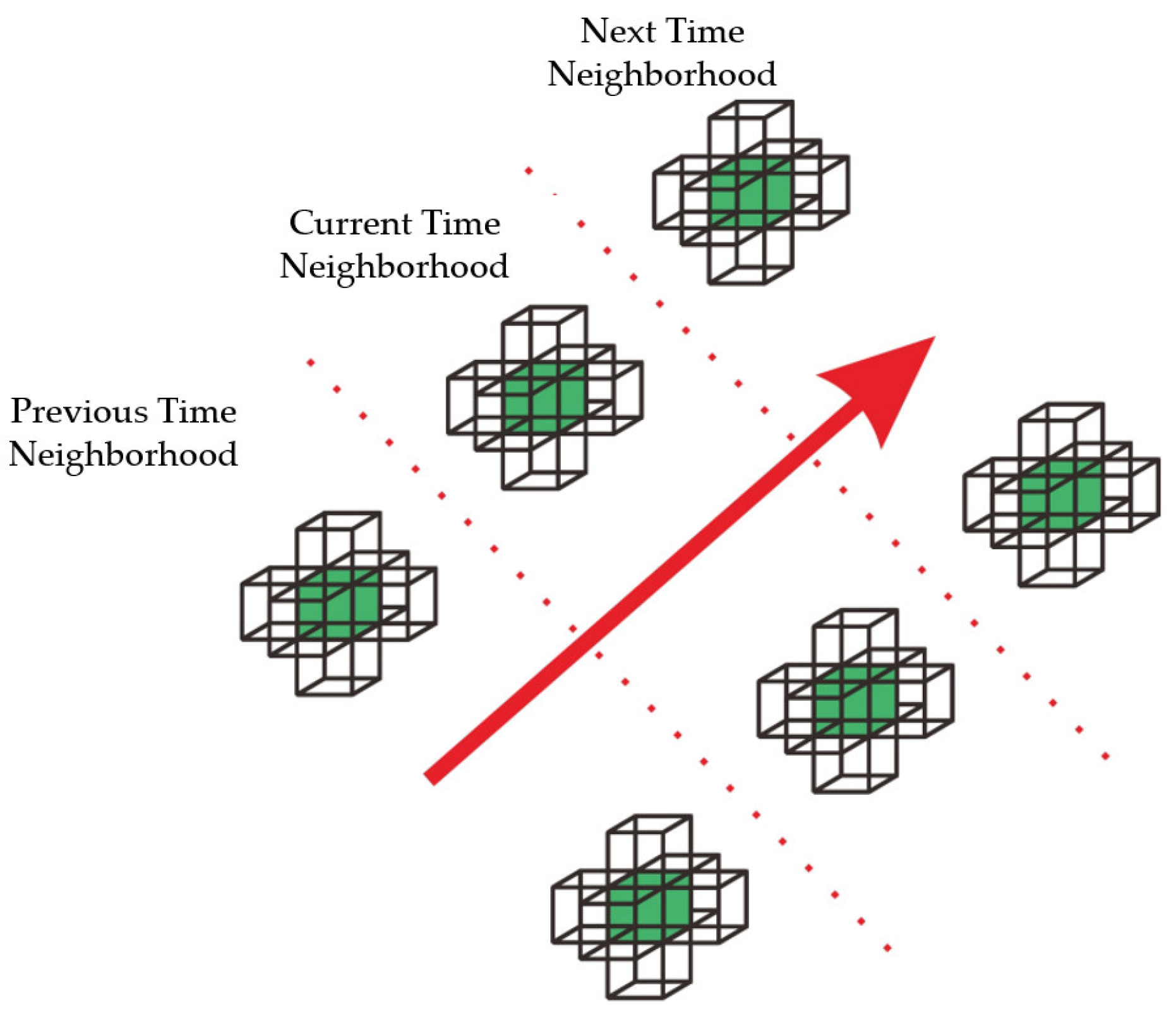
2.2.3. Spacetime Computation of Indoor Spacetime Grid
| Algorithm 5: Algorithm of XY plane spacetime eight neighborhoods. |
|
| Ensure: the XY plane spacetime twenty-six neighborhood grid set R of this subdivision volume 1: set to be an empty array 2: Calculate the codes obtained by moving by one unit in the positive and negative directions on the x-axis as and , set 3: Calculate the codes obtained by moving by one unit in the positive and negative directions on the y-axis as and , set 4: set 5: Calculate the codes obtained by moving by one unit in the positive and negative directions on the y-axis as and , set 6: Take one code from each of , , , and sets, a total of 27 cases. Remove one of the codes with no displacement in the x-axis, y-axis, z-axis, and time-axis, and add the remaining 26 codes to 7: Return the XY plane spacetime twenty-six neighborhood grid set |
2.3. Path Planning of Mobile Robots under Spacetime Grid
2.3.1. Mainstream Path Planning Algorithms
2.3.2. Spacetime-A* Algorithm
| Algorithm 6: Spacetime-A* algorithm. |
| Step1: Input start point, Start, end point, and speed, , and start time, time. The starting point and starting time are encoded into the starting spacetime code, and its cost value into a list called “Open-List”, and the cost value of the starting spacetime code is 0 by default. The “Open-List” list stores the set of spatiotemporal codes currently waiting to be searched, and a “Close-List” list is created to store the searched spatiotemporal codes. Step2: When the Open-List is not empty, go to (1); otherwise, go to step3:
|
3. Results
3.1. Spacetime Computation Experiment of Indoor Spacetime Grid
- Spatial Computing Experiment of Indoor Space Subdivision Coding
- Time Calculation Experiment of Indoor Time Subdivision Coding
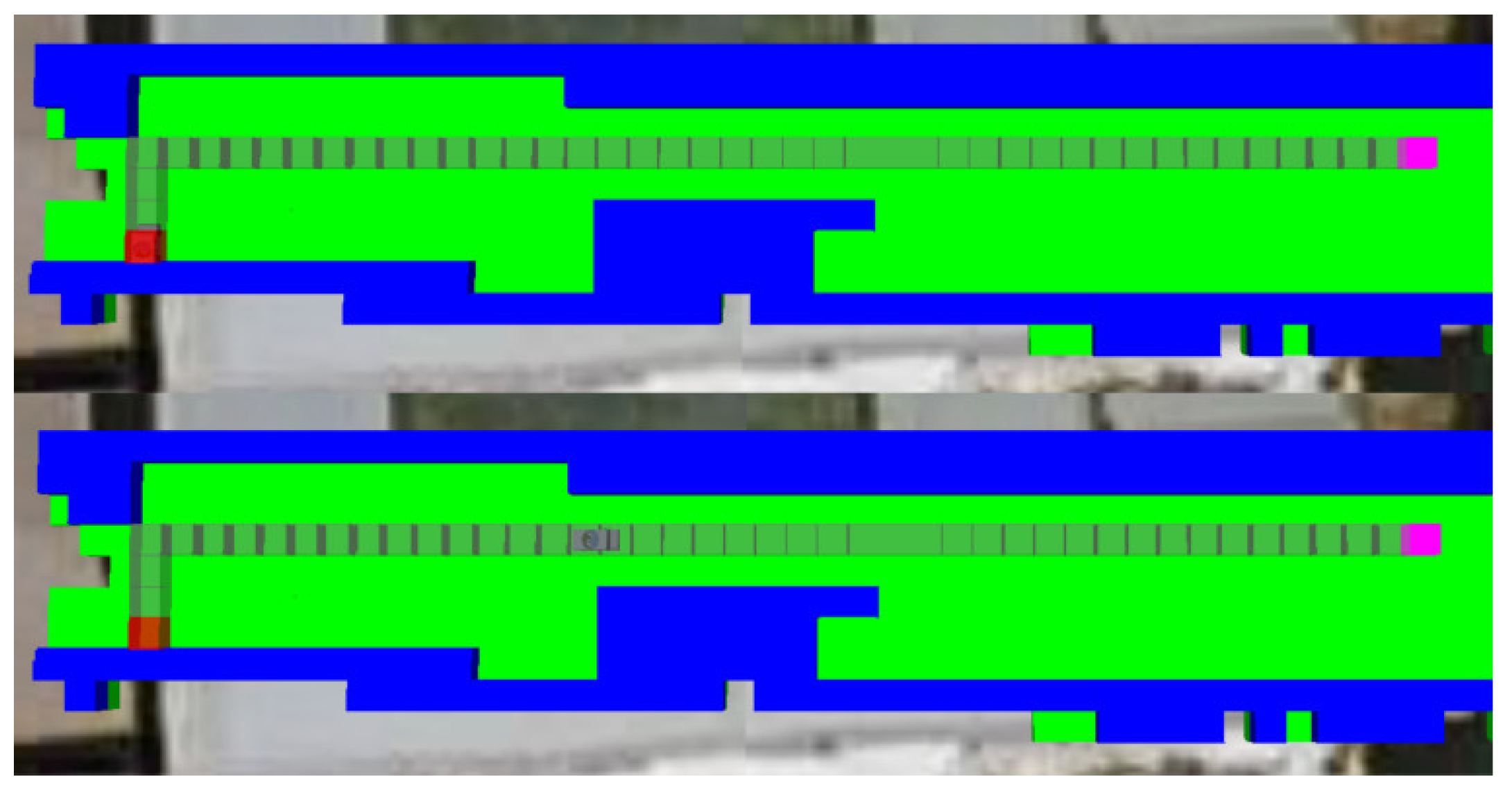
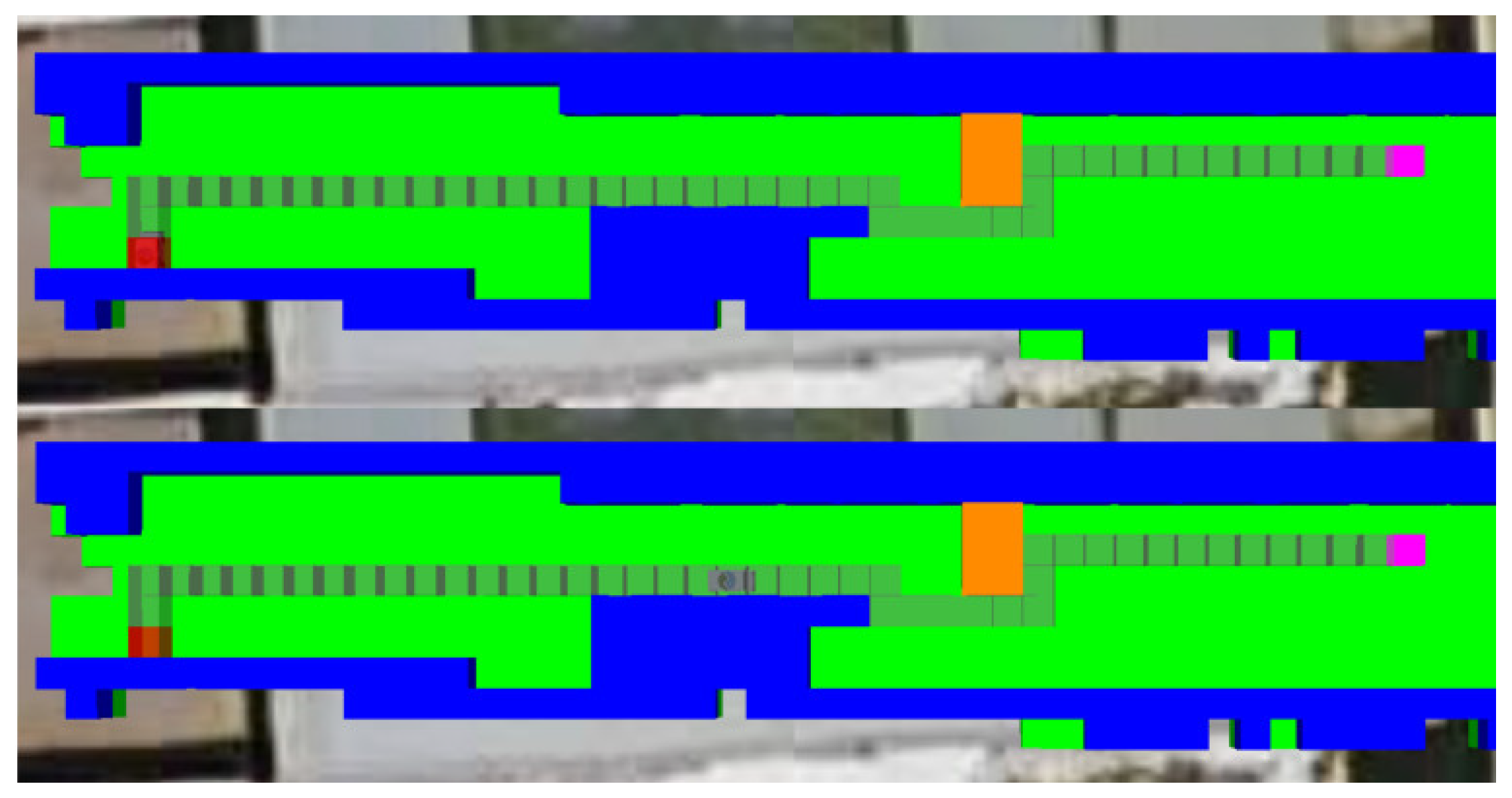
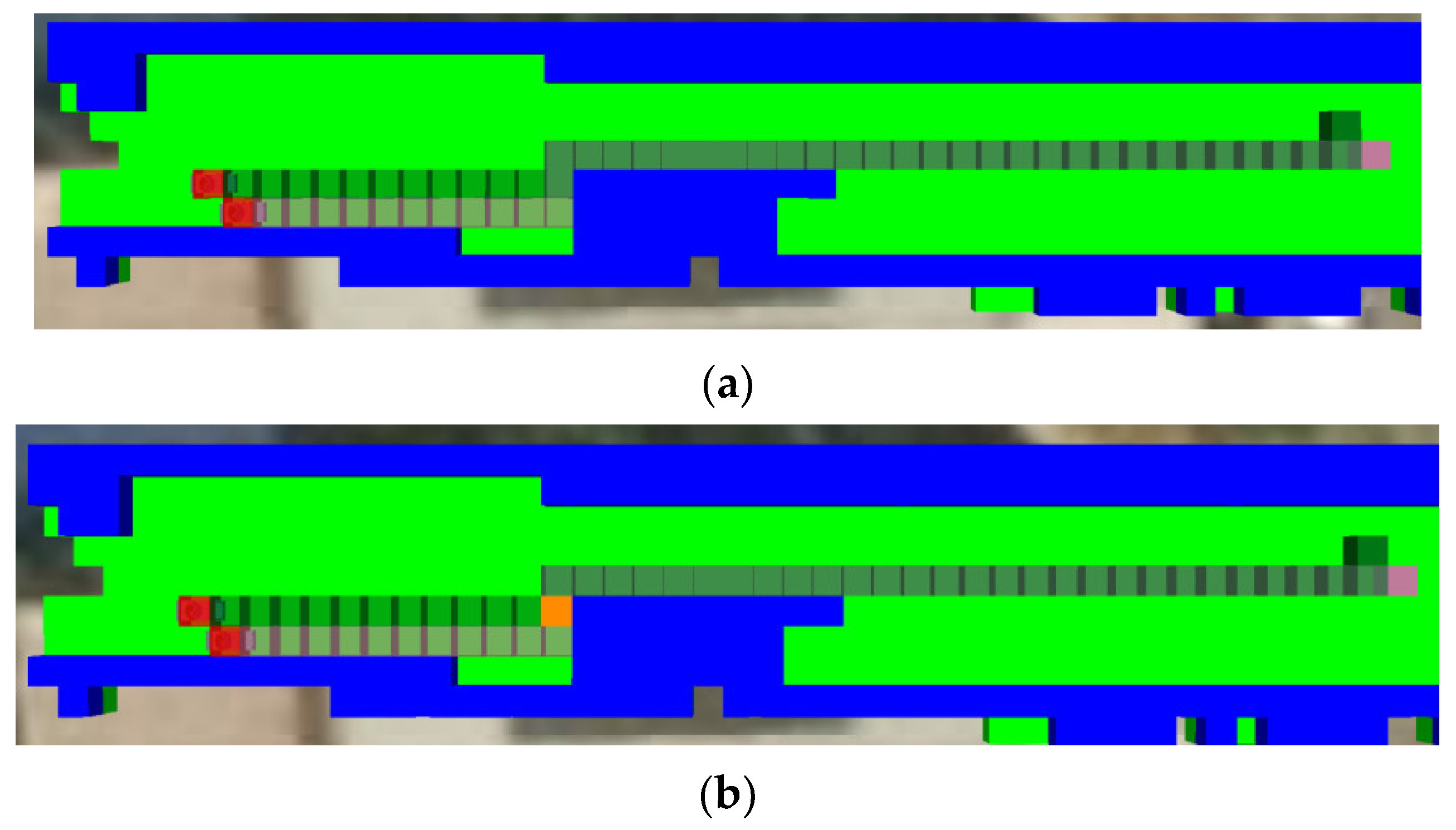
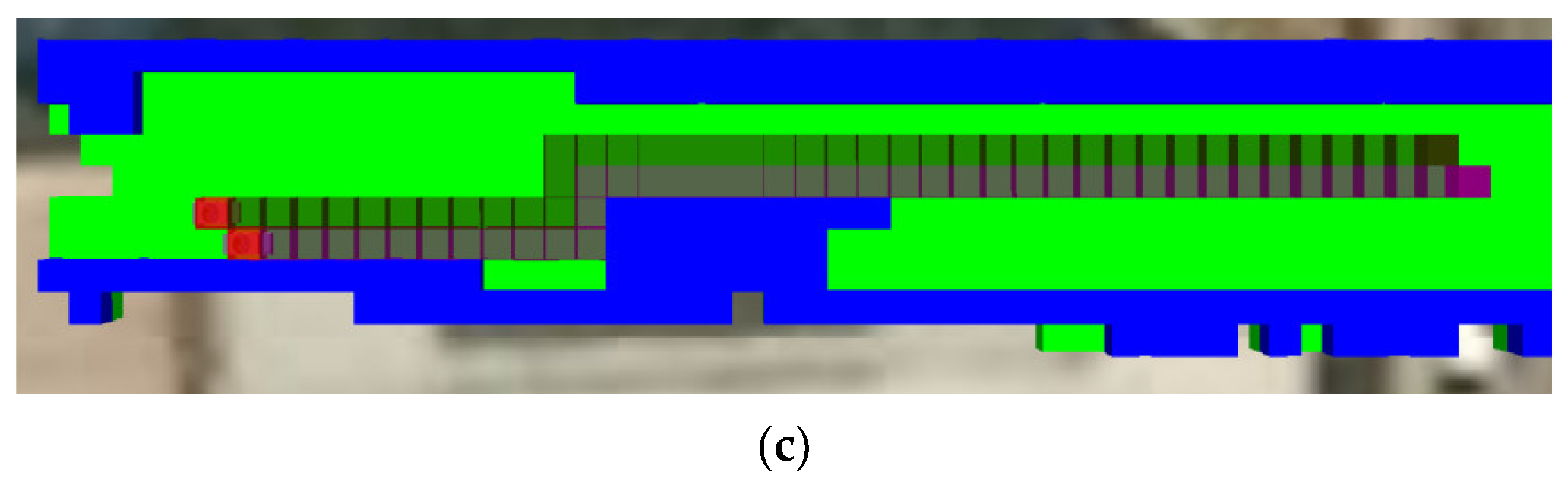
3.2. Experiment of Mobile Robot Path Planning Based on Indoor Spacetime Grid Model
4. Discussion
- The indoor spacetime grid model proposed in this paper does successfully integrate indoor space and time to achieve spacetime unity, which is not available in previous methods. The indoor spacetime grid model can also realize the modeling and coding of the indoor complex time-varying environment. Moreover, the data correlation capability of the model lays the foundation for updating the dynamic information of individual grids afterwards; the accurate spacetime calculation capability lays the foundation for the path planning algorithm afterwards. In short, the model can realize the dynamic update of the object information within the model when the physical state of the real object changes, which is perfectly compatible with the time-varying characteristics of indoor space.
- The spacetime grid modeling method can be perfectly compatible with the application of the common A* algorithm. At the same time, using the spacetime property, the STA* algorithm experiment in a time-varying environment can be realized, and the original path planning, which only considers the space level, is upgraded to the spacetime level, which is more suitable for the indoor environment with strong time-varying characteristics. It perfectly solves the problem of difficult mobile robot planning due to the complex time-varying indoor environment.
- The approach proposed in this paper is highly scalable because it starts with a large global framework and then scales down to the interior, which allows the model to seamlessly interface with the existing mature technical standards. This is a natural advantage of the method. It starts from the entire planet, from large to small. Conversely, it is much easier to go from small to large. The spacetime grid model is kept constant and only the individual interior information of a single building is put into the model, just like filling a spacetime container with goods. This makes it easy to achieve the unified management of indoor location services for a region, a city, or even a country.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Botín-Sanabria, D.M.; Mihaita, S.; Peimbert-García, R.E.; Ramírez-Moreno, M.A.; Ramírez-Mendoza, R.A.; Lozoya-Santos, J.d.J. Digital twin technology challenges and applications: A comprehensive review. Remote Sens. 2022, 14, 1335. [Google Scholar] [CrossRef]
- Xue, F.; Lu, W.; Chen, Z.; Webster, C.J. From LiDAR point cloud towards digital twin city: Clustering city objects based on gestalt principles. ISPRS J. Photogramm. Remote Sens. 2020, 167, 418–431. [Google Scholar] [CrossRef]
- Deren, L.; Wenbo, Y.; Zhenfeng, S. Smart city based on digital twins. Comput. Urban Sci. 2021, 1, 4. [Google Scholar] [CrossRef]
- Shahat, E.; Hyun, C.T.; Yeom, C. City digital twin potentials: A review and research agenda. Sustainability 2021, 13, 3386. [Google Scholar] [CrossRef]
- Mohammadi, N.; Taylor, J.E. Thinking fast and slow in disaster decision-making with smart city digital twins. Nat. Comput. Sci. 2021, 1, 771–773. [Google Scholar] [CrossRef]
- Dembski, F.; Woessner, U.; Letzgus, M.; Ruddat, M.; Yamu, C. Urban digital twins for smart cities and citizens: The case study of herrenberg, germany. Sustainability 2020, 12, 2307. [Google Scholar] [CrossRef]
- Huang, J.; Luo, H.; Shao, W.; Zhao, F.; Yan, S. Accurate and robust floor positioning in complex indoor environments. Sensors 2020, 20, 2698. [Google Scholar] [CrossRef]
- Gerstweiler, G.; Vonach, E.; Kaufmann, H. HyMoTrack: A mobile AR navigation system for complex indoor environments. Sensors 2015, 16, 17. [Google Scholar] [CrossRef]
- Tang, B.; Jiang, C.; He, H.; Guo, Y. Human mobility modeling for robot-assisted evacuation in complex indoor environments. IEEE Trans. Hum.-Mach. Syst. 2016, 46, 694–707. [Google Scholar] [CrossRef]
- He, Y.; Liu, Y.; Jin, Y.; Zhang, S.; Lai, Y.; Hu, S. Context-consistent generation of indoor virtual environments based on geometry constraints. IEEE Trans. Vis. Comput. Graph. 2021; in press. [Google Scholar] [CrossRef]
- Li, Y.; Ma, L.; Tan, W.; Sun, C.; Cao, D.; Li, J. GRNet: Geometric relation network for 3D object detection from point clouds. ISPRS J. Photogramm. Remote Sens. 2020, 165, 43–53. [Google Scholar] [CrossRef]
- Kang, Z.; Yang, J.; Yang, Z.; Cheng, S. A review of techniques for 3D reconstruction of indoor environments. ISPRS Int. J. Geo-Inf. 2020, 9, 330. [Google Scholar] [CrossRef]
- Hong, S.; Jung, J.; Kim, S.; Cho, H.; Lee, J.; Heo, J. Semi-automated approach to indoor mapping for 3D as-built building information modeling. Comput. Environ. Urban Syst. 2015, 51, 34–46. [Google Scholar] [CrossRef]
- Ikehata, S.; Yang, H.; Furukawa, Y. Structured indoor modeling. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Oesau, S. Geometric Modeling of Indoor Scenes from Acquired Point Data. Ph.D. Thesis, University Nice Sophia Antipolis, Nice, France, 15 July 2015. [Google Scholar]
- Del Pero, L.; Bowdish, J.; Fried, D.; Kermgard, B.; Hartley, E.; Barnard, K. Bayesian geometric modeling of indoor scenes. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012. [Google Scholar]
- Chen, K.; Lai, Y.K.; Hu, S.M. 3D indoor scene modeling from RGB-D data: A survey. Comput. Vis. Media 2015, 1, 267–278. [Google Scholar] [CrossRef]
- Jin, L.-S.; Guo, L.; Wang, R.-B.; Zhang, R.-H.; Li, L.-H. System design and navigation control for vision based CyberCar. In Proceedings of the 2006 IEEE International Conference on Vehicular Electronics and Safety, Shanghai, China, 13–15 December 2006. [Google Scholar]
- Liu, Y.; Wang, H.; Xie, J. Global path planning method based on geometry algorithm in a strait environment. In Proceedings of the 2010 International Conference on Electrical and Control Engineering, Wuhan, China, 25–27 June 2010. [Google Scholar]
- Yan, L.Y. Research on Path Planning Technology of Mobile Car in Indoor Dynamic Environment. Mather’s Thesis, Southeast University, Nanjing, China, 2018. [Google Scholar]
- Lin, W.Y.; Lin, P.H. Intelligent generation of indoor topology (i-GIT) for human indoor pathfinding based on IFC models and 3D GIS technology. Autom. Constr. 2018, 94, 340–359. [Google Scholar] [CrossRef]
- Zhou, X.; Xie, Q.; Guo, M.; Zhao, J.; Wang, J. Accurate and efficient indoor pathfinding based on building information modeling data. IEEE Trans. Ind. Inform. 2020, 16, 7459–7468. [Google Scholar] [CrossRef]
- Rituerto, A.; Murillo, A.C.; Guerrero, J.J. Semantic labeling for indoor topological mapping using a wearable catadioptric system. Robot. Auton. Syst. 2014, 62, 685–695. [Google Scholar] [CrossRef]
- Tran, H.; Khoshelham, K.; Kealy, A.; Díaz-Vilariño, L. Extracting topological relations between indoor spaces from point clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 401. [Google Scholar] [CrossRef]
- Zhu, J.; Li, Q.; Cao, R.; Sun, K.; Liu, T.; Garibaldi, J.M.; Qiu, G. Indoor topological localization using a visual landmark sequence. Remote Sens. 2019, 11, 73. [Google Scholar] [CrossRef]
- Jamali, A.; Abdul Rahman, A.; Boguslawski, P.; Kumar, P.; Gold, C.M. An automated 3D modeling of topological indoor navigation network. GeoJournal 2017, 82, 157–170. [Google Scholar] [CrossRef]
- Chen, W.; Guan, M.; Wang, L.; Ruby, R.; Wu, K. FLoc: Device-free passive indoor localization in complex environments. In Proceedings of the 2017 IEEE International Conference on Communications, Paris, France, 21–25 May 2017. [Google Scholar]
- Rahman, S.A.F.S.A.; Maulud, K.N.A.; Pradhan, B.; Mustorpha, S.N.A.S. Manifestation of lattice topology data model for indoor navigation path based on the 3D building environment. J. Comput. Des. Eng. 2021, 8, 1533–1547. [Google Scholar] [CrossRef]
- Heng, L.; Lee, G.H.; Fraundorfer, F.; Pollefeys, M. Real-time photo-realistic 3d mapping for micro aerial vehicles. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Liao, Z.; Zhang, Y.; Luo, J.; Yuan, W. TSM: Topological scene map for representation in indoor environment understanding. IEEE Access 2020, 8, 185870–185884. [Google Scholar] [CrossRef]
- Gorte, B.; Zlatanova, S.; Fadli, F. Navigation in indoor voxel models. Remote Sens. Spatial Inf. Sci. 2019, IV-2/W5, 279–283. [Google Scholar] [CrossRef]
- Chandel, V.; Ahmed, N.; Arora, S.; Ghose, A. InLoc: An end-to-end robust indoor localization and routing solution using mobile phones and BLE beacons. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation, Madrid, Spain, 4–7 October 2016. [Google Scholar]
- Cesium. Available online: https://www.cesium.com/platform/ (accessed on 4 May 2022).
- Qian, C.; Yi, C.; Cheng, C.; Pu, G.; Wei, X.; Zhang, H. GeoSOT-based spatiotemporal index of massive trajectory data. ISPRS Int. J. Geo-Inf. 2019, 8, 284. [Google Scholar] [CrossRef]
- Li, S.; Cheng, C.; Tong, X.; Chen, B.; Zhai, W. A study on data storage and management for massive remote sensing data based on multi-level grid model. Ce Hui Xue Bao 2016, 45 (Suppl. S1), 106–114. [Google Scholar]
- Li, S.; Sun, Z.; Wang, Y.; Wang, Y. Understanding urban growth in beijing-tianjin-hebei region over the past 100 years using old maps and landsat data. Remote Sens. 2021, 13, 326. [Google Scholar] [CrossRef]
- Hou, K.; Cheng, C.; Chen, B.; Zhang, C.; He, L.; Meng, L.; Li, S. A set of integral grid-coding algebraic operations based on geosot-3d. ISPRS Int. J. Geo-Inf. 2021, 10, 489. [Google Scholar] [CrossRef]
- Qian, C.; Yi, C.; Cheng, C.; Pu, G.; Liu, J. A coarse-to-fine model for geolocating chinese addresses. ISPRS Int. J. Geo-Inf. 2020, 9, 698. [Google Scholar] [CrossRef]
- Cheng, C.Q. An Introduce to Spatial Information Subdivision Organization; Science Press: Beijing, China, 2012. [Google Scholar]
- Cheng, C.Q.; Tong, X.C.; Chen, B.; Zhai, W.X. A subdivision method to unify the existing latitude and longitude grids. ISPRS Int. J. Geo-Inf. 2016, 5, 161. [Google Scholar] [CrossRef]
- Zhai, W.X. Unmanned Aircraft Vehicle Neighbourhood Location Grid Computing Model. Ph.D. Thesis, Peking University, Beijing, China, 2018. [Google Scholar]
- Hu, X.G.; Cheng, C.Q.; Tong, X.C. Research on 3D data representation based on GeoSOT-3D. J. Peking Univ. Nat. Sci. Ed. 2015, 51, 1022–1028. [Google Scholar]
- Tong, X.C.; Wang, L.; Wang, R.; Lai, G.L.; Ding, L. An efficient integer coding and computing method for multiscale time segment. Acta Geod. Cartogr. Sin. 2016, 45, 66–76. [Google Scholar]
- Zhang, H.; Zhu, Y.; Liu, X.; Xu, X. Analysis of obstacle avoidance strategy for dual-arm robot based on speed field with improved artificial potential field algorithm. Electronics 2021, 10, 1850. [Google Scholar] [CrossRef]
- Rostami, S.M.H.; Sangaiah, A.K.; Wang, J.; Liu, X. Obstacle avoidance of mobile robots using modified artificial potential field algorithm. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 70. [Google Scholar] [CrossRef]
- Chen, J.-Q.; Tan, C.-Z.; Mo, R.-X.; Wang, Z.-K.; Wu, J.-H.; Zhao, C.-Y. Path planning of mobile robot with A algorithm based on artificial potential field. Ji Suan Ji Ke Xue 2021, 48, 327–333. [Google Scholar]
- Pan, J.; Qian, Q.; Fu, Y.; Feng, Y. Multi-population genetic algorithm based on optimal weight dynamic control learning mechanism. Jisuanji Kexue Yu Tansuo 2021, 15, 2421–2437. [Google Scholar]
- Cui, X.; Yang, J.; Li, J.; Wu, C. Improved genetic algorithm to optimize the wi-fi indoor positioning based on artificial neural network. IEEE Access 2020, 8, 74914–74921. [Google Scholar] [CrossRef]
- Miao, C.; Chen, G.; Yan, C.; Wu, Y. Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm. Comput. Ind. Eng. 2021, 156, 107230. [Google Scholar] [CrossRef]
- Wei, X.; Xu, J. Distributed path planning of unmanned aerial vehicle communication chain based on dual decomposition. Wirel. Commun. Mob. Comput. 2021, 2021, 6661926. [Google Scholar] [CrossRef]
- Yang, H.; Qi, J.; Miao, Y.; Sun, H.; Li, J. A new robot navigation algorithm based on a double-layer ant algorithm and trajectory optimization. IEEE Trans. Ind. Electron. 2019, 66, 8557–8566. [Google Scholar] [CrossRef]
- Zhou, T.; Ku, J.; Lian, B.; Zhang, Y. Indoor positioning algorithm based on improved convolutional neural network. Neural Comput. Appl. 2022, 34, 6787–6798. [Google Scholar] [CrossRef]
- Gao, J.J.; Ye, W.W.; Guo, J.J.; Li, Z.Z. Deep reinforcement learning for indoor mobile robot path planning. Sensors 2020, 20, 5493. [Google Scholar] [CrossRef] [PubMed]
- Zheng, J.; Mao, S.; Wu, Z.; Kong, P.; Qiang, H. Improved path planning for indoor patrol robot based on deep reinforcement learning. Symmetry 2022, 14, 132. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107, Erratum in SIGART Newsl. 1972, 37, 28–29. [Google Scholar] [CrossRef]
- Stern, R.; Goldenberg, M.; Saffidine, A.; Felner, A. Heuristic search for one-to-many shortest path queries. Ann. Math. Artif. Intell. 2021, 89, 1175–1214. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Grid Size (m) | Level | Grid Size (m) |
|---|---|---|---|
| B | 2048 | 10 | 2 |
| 1 | 1024 | 11 | 1 |
| 2 | 512 | 12 | ½ |
| 3 | 256 | 13 | ¼ |
| 4 | 128 | 14 | 1/8 |
| 5 | 64 | 15 | 1/16 |
| 6 | 32 | 16 | 1/32 |
| 7 | 16 | 17 | 1/64 |
| 8 | 8 | 18 | 1/128 |
| 9 | 4 |
| Level | Time Domain Size | Level | Time Domain Size |
|---|---|---|---|
| 1 | 256 days | 14 | 1 h (60 min) |
| 2 | 128 days | 15 | 32 min |
| 3 | 64 days | 16 | 16 min |
| 4 | 32 days | 17 | 8 min |
| 5 | 16 days | 18 | 4 min |
| 6 | 8 days | 19 | 2 min |
| 7 | 4 days | 20 | 1 min (60 s) |
| 8 | 2 days | 21 | 32 s |
| 9 | 1 d (24 h) | 22 | 16 s |
| 10 | 16 h | 23 | 8 s |
| 11 | 8 h | 24 | 4 s |
| 12 | 4 h | 25 | 2 s |
| 13 | 2 h | 26 | 1 s |
| Algorithm | Whole/Part | Efficiency | Planning Ability | Complexity | Path Smoothness |
|---|---|---|---|---|---|
| Artificial Potential Field Algorithm | Part | High | Weak | Low | High |
| Neural Network Algorithm | Part | Low | Medium | High | Medium |
| Genetic Algorithm | Whole | Low | Strong | High | Medium |
| Ant Colony Algorithm | Whole | Medium | Strong | Low | Medium |
| A* algorithm | Whole | High | Medium | Low | Medium |
| X (m) | Y (m) | Z (m) | Day | Hour | Minute | Second | Leap Year |
|---|---|---|---|---|---|---|---|
| 876.72 | 699.33 | 995.51 | 41 | 18 | 19 | 20 | 0 |
| 32.87 | 917.02 | −518.85 | 414 | 21 | 34 | 56 | 1 |
| 71.42 | 321.91 | 536.68 | 2 | 20 | 37 | 48 | 0 |
| 491.53 | −329.07 | 870.49 | 183 | 23 | 40 | 26 | 1 |
| −832.96 | −397.66 | 288.71 | 40 | 19 | 23 | 15 | 1 |
| −157.24 | −974.68 | −245.72 | 150 | 0 | 32 | 4 | 0 |
| 807.37 | 511.31 | −897.74 | 141 | 12 | 49 | 26 | 1 |
| 283.00 | 95.33 | −20.17 | 255 | 7 | 50 | 23 | 1 |
| −428.96 | 909.81 | −72.84 | 139 | 18 | 42 | 57 | 1 |
| 468.72 | −601.85 | 439.22 | 108 | 21 | 4 | 19 | 0 |
| 185.48 | 799.62 | −263.69 | 246 | 17 | 49 | 46 | 1 |
| −799.69 | −441.74 | −196.54 | 164 | 19 | 2 | 53 | 1 |
| 636.08 | −721.18 | 152.62 | 18 | 12 | 53 | 15 | 1 |
| −370.02 | 345.59 | −355.77 | 73 | 22 | 53 | 29 | 1 |
| −349.74 | −120.91 | −436.05 | 309 | 5 | 54 | 30 | 0 |
| Quantity | Spatial Calculation Method | Level | Time | Correct Rate |
|---|---|---|---|---|
| 50,000 | Stereo six neighborhood computation | 10 | 109.71 ms | 100% |
| 50,000 | Stereo twenty-six neighborhood computation | 10 | 553.53 ms | 100% |
| 50,000 | Parent grid calculation | 10 | 50.9 ms | 100% |
| 50,000 | Subgrid computing | 10 | 143.11 ms | 100% |
| 50,000 | Stereo six neighborhood computation | 15 | 99.28 ms | 100% |
| 50,000 | Stereo twenty-six neighborhood computation | 15 | 526.22 ms | 100% |
| 50,000 | Parent grid calculation | 15 | 54.86 ms | 100% |
| 50,000 | Subgrid computing | 15 | 142.16 ms | 100% |
| Level | Quantity | Decoding Neighborhood Computation | This Paper’s Method | Correct Rate |
|---|---|---|---|---|
| 9 | 50,000 | 237.31 ms | 152.52 ms | 100% |
| 14 | 50,000 | 247.34 ms | 160.51 ms | 100% |
| 20 | 50,000 | 250.39 ms | 175.49 ms | 100% |
| 26 | 50,000 | 228.42 ms | 164.56 ms | 100% |
| 9 | 100,000 | 469.88 ms | 339.98 ms | 100% |
| 14 | 100,000 | 449.91 ms | 327.13 ms | 100% |
| 20 | 100,000 | 467.87 ms | 324.14 ms | 100% |
| 26 | 100,000 | 443.89 ms | 328.14 ms | 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhuang, Q.; Li, G. RETRACTED: Robot Path Planning Method Based on Indoor Spacetime Grid Model. Remote Sens. 2022, 14, 2357. https://doi.org/10.3390/rs14102357
Zhang H, Zhuang Q, Li G. RETRACTED: Robot Path Planning Method Based on Indoor Spacetime Grid Model. Remote Sensing. 2022; 14(10):2357. https://doi.org/10.3390/rs14102357
Chicago/Turabian StyleZhang, Huangchuang, Qingjun Zhuang, and Ge Li. 2022. "RETRACTED: Robot Path Planning Method Based on Indoor Spacetime Grid Model" Remote Sensing 14, no. 10: 2357. https://doi.org/10.3390/rs14102357
APA StyleZhang, H., Zhuang, Q., & Li, G. (2022). RETRACTED: Robot Path Planning Method Based on Indoor Spacetime Grid Model. Remote Sensing, 14(10), 2357. https://doi.org/10.3390/rs14102357