
Signal-to-Noise Ratio Analyses of Spaceborne GNSS-Reflectometry from Galileo and BeiDou Satellites


Abstract
:1. Introduction
2. Dataset and Processing
2.1. Dateset
2.2. Processing of the Complex Waveforms
2.2.1. Coherent and Incoherent Integrations
- Case 1:, ; , and
- Case 2:, ; , and
- Case 3:, ; , and
2.2.2. Signal-to-Noise (SNR) and Normalized-SNR (NSNR)
2.2.3. Quality Control and Col-Location
- (1)
- Spaceborne GNSS-R receiver antenna gain in the specular direction >3 dBi;The Complex Waveform Product does not provide receiver antenna gain towards the specular point direction, but only the positions of the transmitter, receiver and specular point. As a result, we need to calculate the antenna gain. In this study, the attitude information of GNSS-R satellite, which is provided by CYGNSS L1 and TDS-1 L1b with a three-element array corresponding to: Roll angle, Pitch angle, Yaw angle, were applied. Moreover, the antenna pattern map and the position of receiver and specular point are also used to calculate the antenna gain. The detailed calculation process is given in [28]. The 3 dB threshold is set to remove the samples with low antenna gain, which is also normally applied in different ocean wind speed retrieval algorithms and products.
- (2)
- The Range Corrected Gain (RCG) ;According to [27], the RCG is can be computed by:in which denotes the receiver antenna gain in the specular direction; and are the transmitter and receiver ranges from the specular point, respectively. The RCG is an improved definition of gain, which considers both the effect of the receiver antenna and the effect of the attenuation due to range losses. is to mitigate the effect of noise.
- (3)
- The TDS-1 is in a quasi-Sun synchronous orbit with an inclination of 98.4. To remove strong coherent reflections from sea ice, the data of TDS-1 has been filtered by only keeping specular point latitude between 55 degrees South and 55 degrees North.
- (4)
- For the CYGNSS measurements, the blackbody calibration is performed every 60 s, when the instrument is connected to the internal load instead of the science antennas. During the blackbody calibration, there is no valid reflected signal in the raw IF data sets. However, there is no flag in the “Complex Waveform Product” indicating the blackbody calibration measurements. Here in this study, the complex waveforms are synchronized to the standard Level 1 DDM products by using the GPS time variable, so that the complex waveforms generated during the period flagged by the “black_body_ddm” of variable “quality_flags” can be removed.
3. Results and Analysis
3.1. SNR
3.1.1. Comparison between TDS-1 and CYGNSS
- (1)
- Receiver orbit altitude. The altitude of TDS-1 is 635 km while CYGNSS is 510 km [27]. Clearly, term of in the Equation (5) for TDS-1 is larger than for CYGNSS, which result in lower SNR from TDS-1 than from CYGNSS. The loss of propagation path caused by orbit altitude is one of the factors to be considered in future spaceborne GNSS-R missions.
- (2)
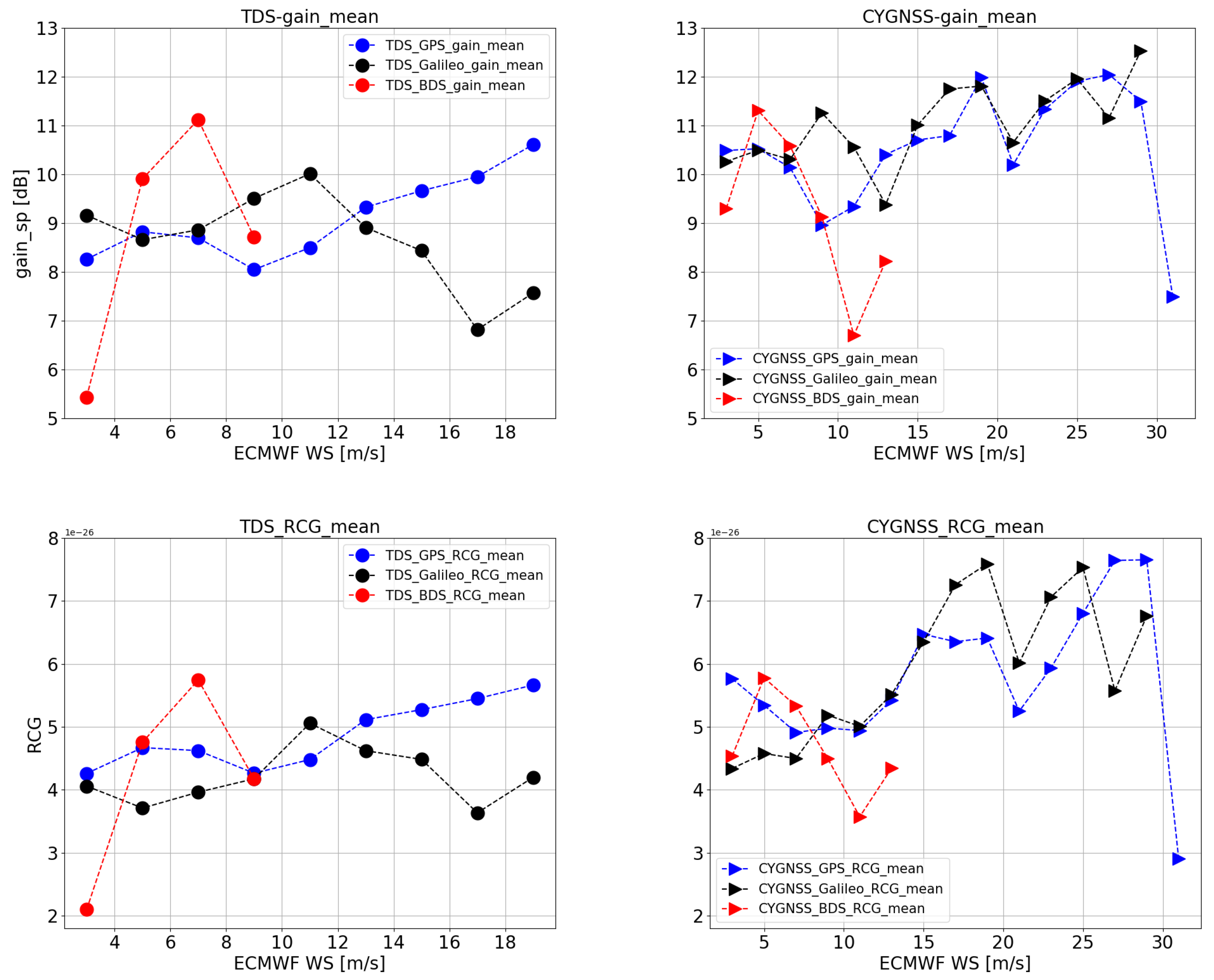
- Receiver antenna gain toward specular point. TDS-1 has a nadir-pointing antenna with a peak gain of 13.3 dBi, while CYGNSS has two nadir antennas (port and starboard) with the peak gain of 14 dBi. Figure 6 (Top-left and Top-right) show the mean of antenna gain at different wind speed batches from TDS-1 and CYGNSS respectively. It is clearly shown that the antenna gain of TDS-1 is lower than CYGNSS for most of the GNSS-R measurements.
3.1.2. Comparison between GPS, Galileo and BDS-3
3.2. Normalized SNR
- (1)
- (2)
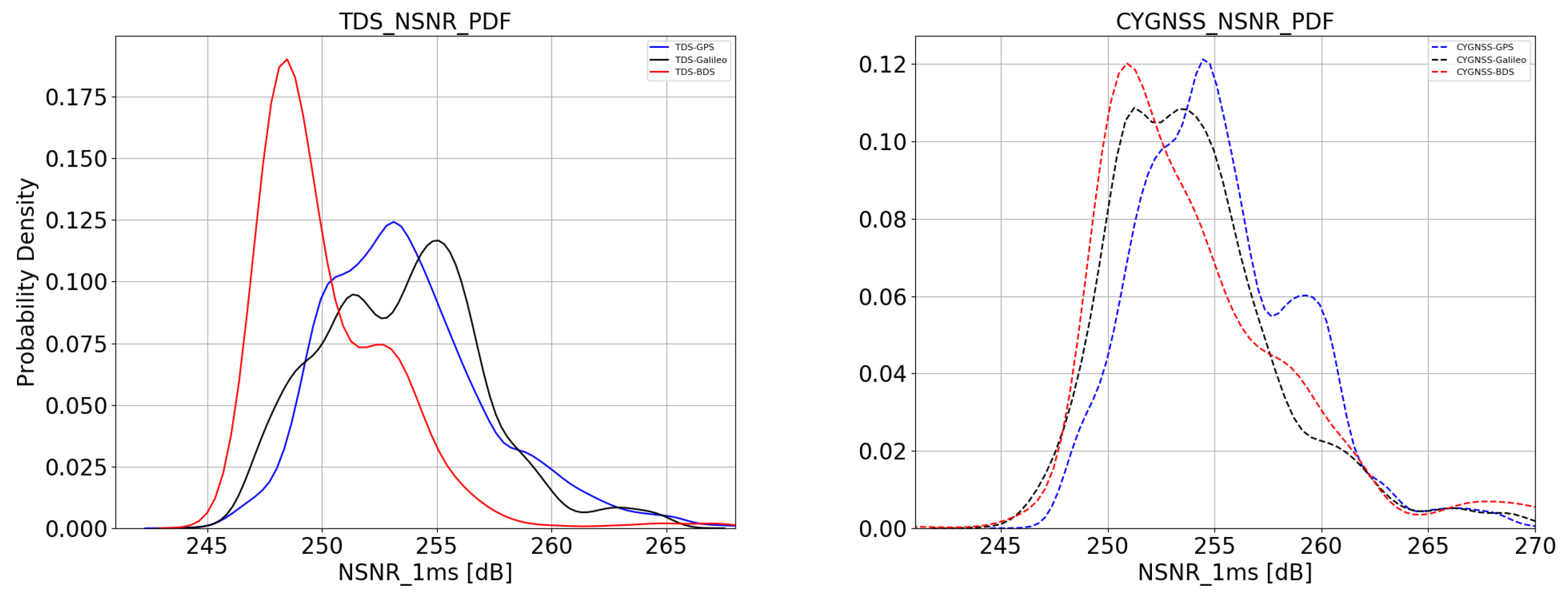
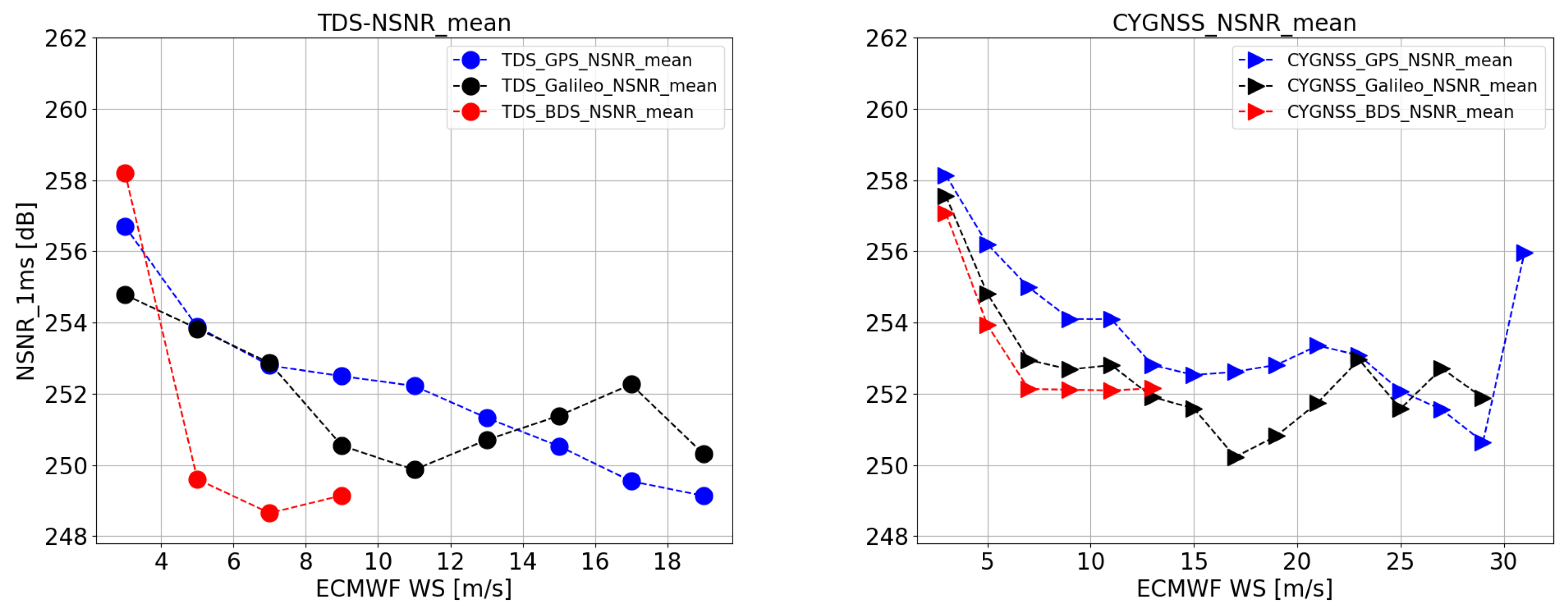
- The NSNR of the reflected signals from Galileo is similar to that from GPS for TDS-1 but ∼1–2 dB lower for CYGNSS. As mentioned in the [31], this may be due to the bandwidths of the receivers onboard the TDS-1 and CYGNSS satellites. The receiver bandwidth for TDS-1 is ∼4.2 MHz, which can cover the main components of the Galileo E1 B/C signals. While the receiver bandwidth for CYGNSS is only ∼2.5 MHz, which can induce a significant power loss (∼0.7 dB) of the received Galileo E1 B/C signals.
- (3)
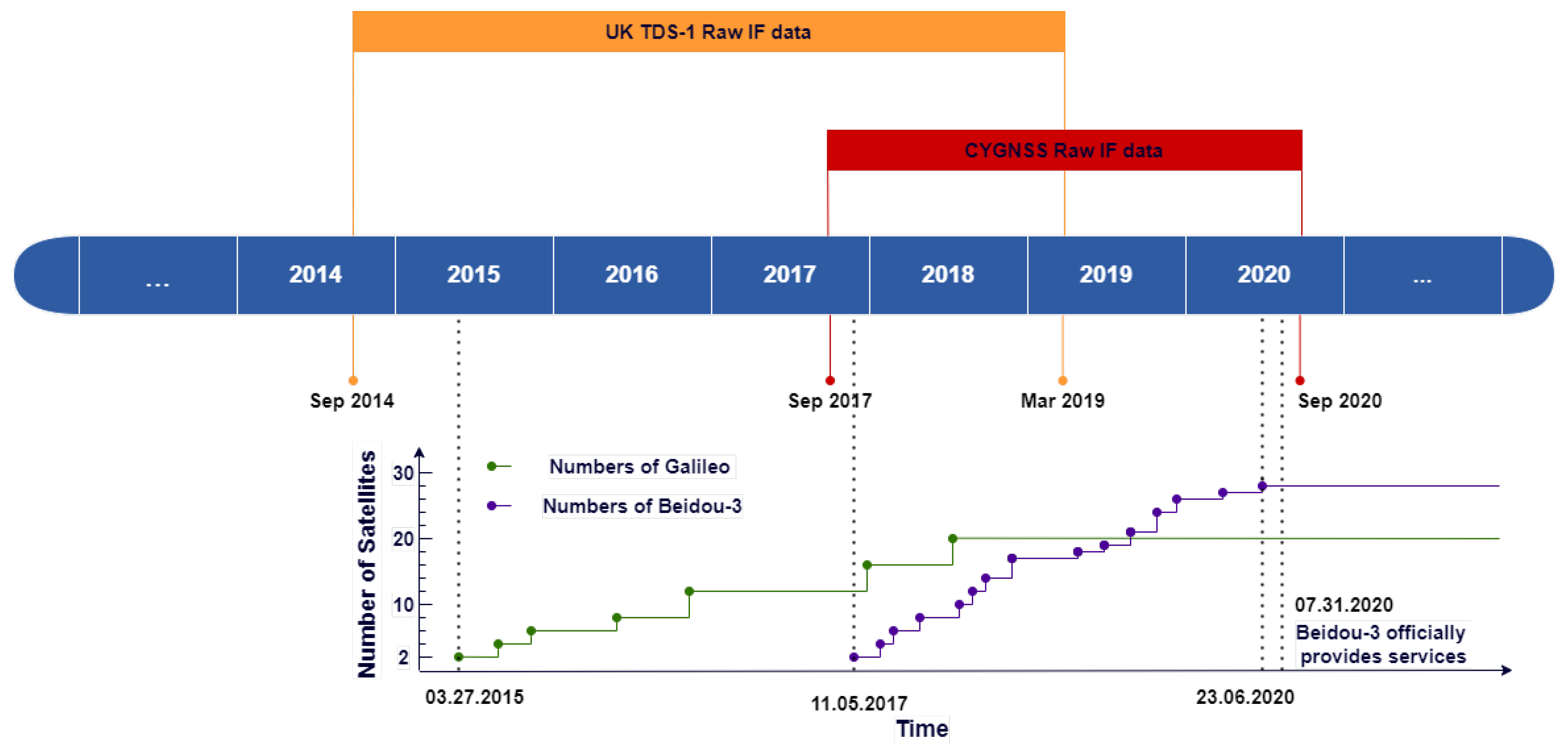
- The NSNR of the reflected signals from BDS-3 is much lower (∼4 dB) than these from GPS and Galileo for the TDS-1 case except for most of the points. However, the BDS-3 measurements show similar NSNRs with Galileo for the CYGNSS case. The main reason could be the evolution of the BDS-3 constellation. As shown in Figure 1, most of the BDS-3 GNSS-R measurements from TDS-1 were collected during the beginning of the construction of the BDS-3 system, when the BDS-3 satellites can transmit less power just for testing purpose. While most of the BDS-3 GNSS-R measurements from CYGNSS were collected during the experimental operational to fully operational stages of the BDS-3 system, when the BDS-3 satellites can transmit the navigation signals at their nominal power levels.
3.3. Coherent Integration Time
- (1)
- (2)
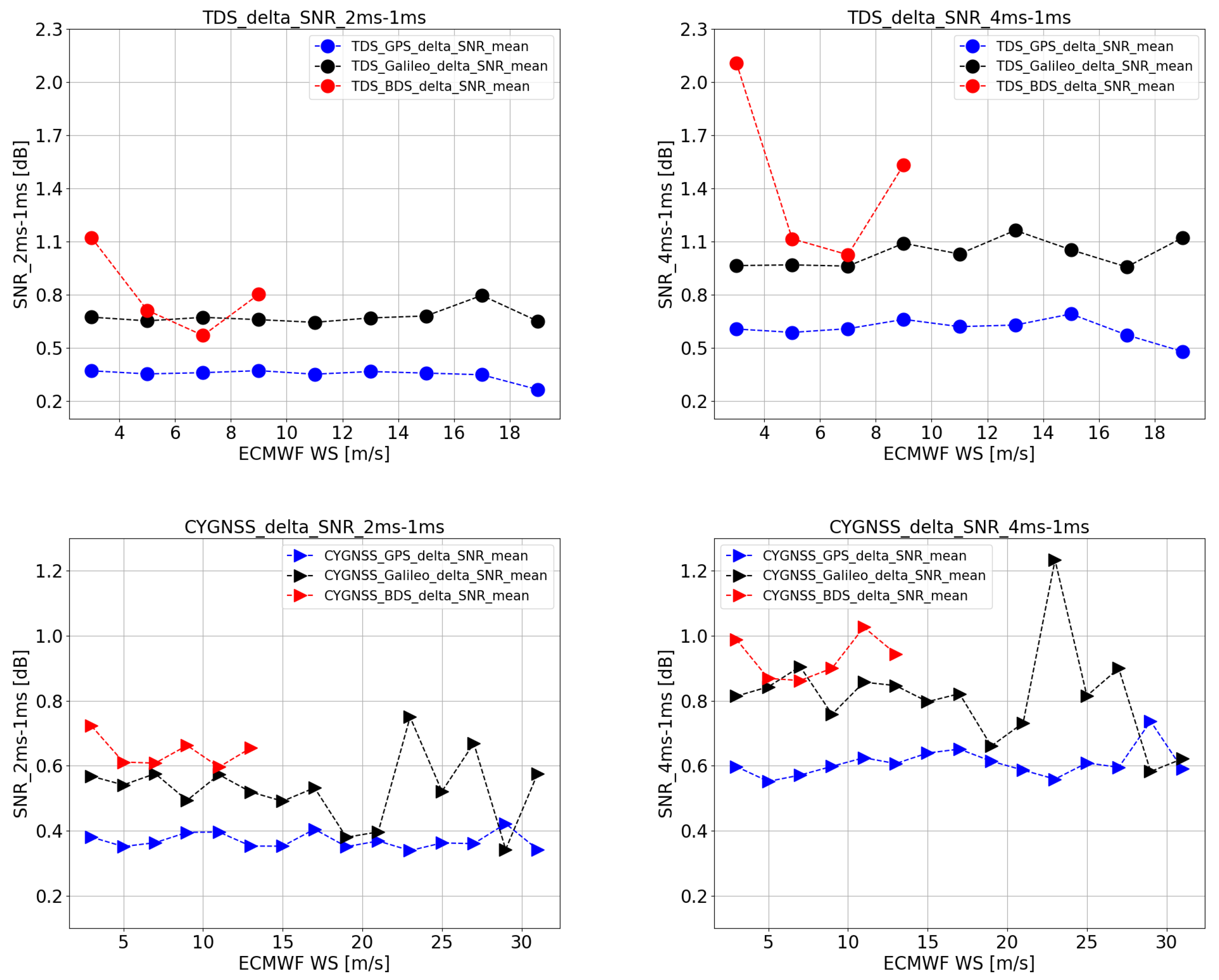
- Similar SNR improvements can be seen for GPS L1 C/A signal for TDS-1 and CYGNSS, i.e., ∼0.4 dB improvement from 1 ms to 2 ms and ∼0.6 dB improvement from 1 ms to 4 ms.
- (3)
- The increasing of the coherent integration time has different effects on different GNSS signals. The SNR of the reflected signal can be improved more efficiently for Galileo and BDS-3 than for GPS. The SNR improvement for BDS-3 B1C signal and Galileo E1 B/C signal is ∼0.6–0.8 dB with 2 ms coherent integration time and is ∼0.8–1.2 dB with 4 ms coherent integration time (except for some outliers), which is ∼0.3–0.5 dB higher than for GPS L1 C/A code signal. It is mainly due to the relative narrower Doppler bandwidth of the reflected BDS-3 and Galileo E1 B/C signals.
- (4)
- The SNR improvements of Galileo and BDS-3 signals are more significant for TDS-1 than for CYGNSS (e.g., ∼0.8 dB for CYGNSS-Galileo and ∼1.0 dB for TDS-Galileo), which is also mainly due to the wider receiver bandwidth of the TDS-1 instrument.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ACF | Autocorrelation Function |
| BDS | BeiDou Global Navigation Satellite System |
| BF-1 | BuFeng-1 |
| BOC | Binary Offset Carrier |
| BRCS | Bistatic Radar Cross Section |
| CYGNSS | Cyclone Global Navigation Satellite System |
| DDM | Delay Doppler Map |
| ECMWF | European Centre for Medium-range Weather Forecast |
| EIRP | Effective Isotropic Radiated Power |
| ERA-5 | ECMWF Reanalysis 5th Generation |
| ECMWF/C3S | ECMWF/Copernicus Climate Change Service |
| FOC | Full Operational Capability |
| FSSCAT | Federated Satellite System Scatterometer |
| Galileo | Galileo Satellite Navigation System |
| GEO | Geosynchronous Equatorial Orbit |
| GNSS | Global Navigation Satellite System |
| GNSS-R | GNSS Reflectometry |
| GOLD-RTR | GPS Open Loop Differential Real-Time Receiver |
| GPS | Global Positioning System |
| IEEC | Institut d’Estudis Espacials de Catalunya |
| IF | Intermediate Frequency |
| IGSO | Inclined Geosynchronous Orbit |
| LEO | Low Earth Orbit |
| MEO | Medium Earth Orbit |
| MERRByS | Measurement of Earth Reflected Radio-navigation signals By Satellite |
| NASA | National Aeronautics and Space Administration |
| NBRCS | Normalized Bistatic Radar Cross Section |
| NSNR | Normalized SNR |
| NWP | Numerical Weather Prediction |
| PODAAC | NASA’s Physical Oceanography Distributed Active Archive Center |
| PDFs | Probability Density Functions |
| PRN | Pseudorandom Noise |
| QC | Quality Control |
| RCG | Range Corrected Gain |
| SGR-ReSI | Space GNSS Receiver-Remote Sensing Instrument |
| SNR | Signal-to-Noise Ratio |
| TDS-1 | UK TechDemoSat-1 |
| UK-DMC | UK Disaster Monitoring Constellation |
| WAF | Woodward Ambiguity Function |
References
- Hall, C.D.; Cordey, R.A. Multistatic scatterometry. In Proceedings of the International Geoscience and Remote Sensing Symposium, ‘Remote Sensing: Moving Toward the 21st Century’, Edinburgh, UK, 12–16 September 1988; pp. 561–562. [Google Scholar] [CrossRef]
- Martin-Neira, M. A passive reflectometry and interferometry system (PARIS): Application to ocean altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Martin-Neira, M.; Caparrini, M.; Font-Rossello, J.; Lannelongue, S.; Vallmitjana, C.S. The paris concept: An experimental demonstration of sea surface altimetry using gps reflected signals. IEEE Trans. Geosci. Remote Sens. 2001, 39, 142–150. [Google Scholar] [CrossRef] [Green Version]
- Treuhaft, R.N.; Lowe, S.T.; Zuffada, C.; Chao, Y. 2-cm gps altimetry over crater lake. Geophys. Res. Lett. 2001, 28, 4343–4346. [Google Scholar] [CrossRef]
- Garrison, J.L.; Katzberg, S.J.; Hill, M.I. Effect of sea roughness on bistatically scattered range coded signals from the global positioning system. Geophys. Res. Lett. 1998, 25, 2257–2260. [Google Scholar] [CrossRef] [Green Version]
- Rius, A.; Aparicio, J.M.; Cardellach, E.; Martín-Neira, M.; Chapron, B. Sea surface state measured using gps reflected signals. Geophys. Res. Lett. 2002, 29, 37-1–37-4. [Google Scholar] [CrossRef] [Green Version]
- Gleason, S.; Hodgart, S.; Sun, Y.; Gommenginger, C.; Mackin, S.; Adjrad, M.; Unwin, M. Detection and processing of bistatically reflected GPS signals from low earth orbit for the purpose of ocean remote sensing. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1229–1241. [Google Scholar] [CrossRef] [Green Version]
- Unwin, M.; Jales, P.; Tye, J.; Gommenginger, C.; Foti, G.; Rosello, J. Spaceborne GNSS-Reflectometry on TechDemoSat-1: Early Mission Operations and Exploitation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4525–4539. [Google Scholar] [CrossRef]
- Ruf, C.S.; Atlas, R.; Chang, P.S.; Clarizia, M.P.; Garrison, J.L.; Gleason, S.; Katzberg, S.J.; Jelenak, Z.; Johnson, J.T.; Majumdar, S.J.; et al. New ocean winds satellite mission to probe hurricanes and tropical convection. Bull. Am. Meteorol. Soc. 2016, 97, 385–395. [Google Scholar] [CrossRef]
- Foti, G.; Gommenginger, C.; Jales, P.; Unwin, M.; Shaw, A.; Robertson, C.; Roselló, J. Spaceborne GNSS reflectometry for ocean winds: First results from the UK TechDemoSat-1 mission. Geophys. Res. Lett. 2015, 42, 5435–5441. [Google Scholar] [CrossRef] [Green Version]
- Chew, C.; Shah, R.; Zuffada, C.; Hajj, G.; Masters, D.; Mannucci, A.J. Demonstrating soil moisture remote sensing with observations from the UK TechDemoSat-1 satellite mission. Geophys. Res. Lett. 2016, 43, 3317–3324. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Cardellach, E.; Fabra, F.; Rius, A.; Ribó, S.; Martín-Neira, M. First spaceborne phase altimetry over sea ice using techdemosat-1 gnss-r signals. Geophys. Res. Lett. 2017, 44, 8369–8376. [Google Scholar] [CrossRef]
- Jing, C.; Niu, X.; Duan, C.; Lu, F.; Di, G.; Yang, X. Sea surface wind speed retrieval from the first Chinese GNSS-R mission: Technique and preliminary results. Remote Sens. 2019, 11, 3013. [Google Scholar] [CrossRef] [Green Version]
- Jales, P.; Esterhuizen, S.; Masters, D.; Nguyen, V.; Correig, O.N.; Yuasa, T.; Cartwright, J. The new Spire GNSS-R satellite missions and products. In Image and Signal Processing for Remote Sensing XXVI; Bruzzone, L., Bovolo, F., Santi, E., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2020; Volume 11533. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Fernandez, L.; Perez, A.; Ruiz-De-azua, J.A.; Park, H.; Camps, A.; Domínguez, B.C.; Pastena, M. In-orbit validation of the fmpl-2 instrument—The gnss-r and l-band microwave radiometer payload of the fsscat mission. Remote Sens. 2021, 13, 121. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, X.; Du, Q.; Bai, W.; Xia, J.; Cai, Y.; Qiao, H. The status and progress of fengyun-3e gnos ii mission for gnss remote sensing. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5181–5184. [Google Scholar]
- SSTL Demonstrates New GNSS-R Payload Capabilities. 2020. Available online: https://www.sstl.co.uk/media-hub/latest-news/2020/sstl-demonstrates-new-gnss-r-capabilities (accessed on 12 Octorber 2021).
- Yang, Y.; Liu, L.; Li, J.; Yang, Y.; Zhang, T.; Mao, Y.; Ren, X. Featured services and performance of bds-3. Sci. Bull. 2021, 66, 2135–2143. Available online: https://www.sciencedirect.com/science/article/pii/S2095927321004187 (accessed on 12 Octorber 2021). [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Sośnica, K.; Prange, L.; Kaźmierski, K.; Bury, G.; Drożdżewski, M.; Zajdel, R.; Hadas, T. Validation of Galileo orbits using SLR with a focus on satellites launched into incorrect orbital planes. J. Geod. 2018, 92, 131–148. [Google Scholar] [CrossRef]
- Nogués-Correig, O.; Cardellach, E.; Campderros, J.S.; Rius, A. A gps-reflections receiver that computes doppler/delay maps in real time. IEEE Trans. Geosci. Remote Sens. 2007, 45, 156–174. [Google Scholar] [CrossRef]
- Cardellach, E.; Fabra, F.; Nogués-Correig, O.; Oliveras, S.; Ribó, S.; Rius, A. Gnss-r ground-based and airborne campaigns for ocean, land, ice, and snow techniques: Application to the gold-rtr data sets. Radio Sci. 2011, 46. [Google Scholar] [CrossRef] [Green Version]
- Galileo. Signal-in-Space Interface Control Document. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo-OS-SIS-ICD.pdf (accessed on 12 Octorber 2021).
- China Satellite Navigation Office. BeiDou Navigation Satellite System Open Service Performance Standard (Version 2.0). 2018. Available online: http://en.beidou.gov.cn/SYSTEMS/Officialdocument/ (accessed on 12 Octorber 2021).
- Li, W.; Cardellach, E.; Fabra, F.; Ribo, S.; Rius, A. Assessment of Spaceborne GNSS-R Ocean Altimetry Performance Using CYGNSS Mission Raw Data. IEEE Trans. Geosci. Remote Sens. 2020, 58, 238–250. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Ribó, S.; Rius, A.; Zhou, B. First spaceborne demonstration of BeiDou-3 signals for GNSS reflectometry from CYGNSS constellation. Chin. J. Aeronaut. 2021, 34, 1–10. [Google Scholar] [CrossRef]
- University of Michigan. CYGNSS Handbook; Michigan Publishing: Ann Arbor, MI, USA, 2016; ISBN 978-1-60785-380-0. Available online: https://clasp-research.engin.umich.edu/missions/cygnss/reference/cygnss-mission/CYGNSS_Handbook_April2016.pdf (accessed on 12 Octorber 2021).
- Jales, P. MERRByS Product Manual: GNSS-Reflectometry on TDS-1 with the SGR-ReSI. 2015. Available online: http://merrbys.co.uk/resources/documentation (accessed on 12 Octorber 2021).
- European Centre for Medium-range Weather Forecast (ECMWF) Copernicus Climate Change (C3S). ERA5: Fifth Generation of ECMWF Atmospheric Reanalyses of the Global Climate. 2020. Available online: https://confluence.ecmwf.int/display/CKB/ERA5%3A+data+documentation (accessed on 12 Octorber 2021).
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef] [Green Version]
- Hammond, M.L.; Foti, G.; Rawlinson, J.; Gommenginger, C.; Srokosz, M.; King, L.; Unwin, M.; Roselló, J. First assessment of geophysical sensitivities from spaceborne Galileo and BeiDou GNSS-reflectometry data collected by the UK TechDemoSat-1 Mission. Remote Sens. 2020, 12, 2927. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Windspeed (ECMWF) | TDS-GPS | TDS-Galileo | TDS-BDS | CYGNSS-GPS | CYGNSS-Galileo | CYGNSS-BDS |
|---|---|---|---|---|---|---|
| [2,4) | 3451 | 1190 | 27 | 671 | 619 | 388 |
| [4,6) | 5936 | 1205 | 150 | 1673 | 1073 | 662 |
| [6,8) | 7238 | 1459 | 191 | 1639 | 600 | 436 |
| [8,10) | 4935 | 743 | 81 | 982 | 797 | 147 |
| [10,12) | 1993 | 60 | – | 583 | 345 | 158 |
| [12,14) | 501 | 59 | – | 238 | 340 | 66 |
| [14,16) | 383 | 75 | – | 228 | 176 | – |
| [16,18) | 161 | 25 | – | 143 | 158 | – |
| [18,20) | 19 | 26 | – | 97 | 102 | – |
| [20,22) | – | – | – | 95 | 53 | – |
| [22,24) | – | – | – | 70 | 47 | – |
| [24,26) | – | – | – | 51 | 34 | – |
| [26,28) | – | – | – | 37 | 30 | – |
| [28,30) | – | – | – | 24 | 20 | – |
| [30,32) | – | – | – | 12 | 1 | – |
| total | 24,617 | 4842 | 449 | 6543 | 4395 | 1857 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nan, Y.; Ye, S.; Liu, J.; Guo, B.; Zhang, S.; Li, W. Signal-to-Noise Ratio Analyses of Spaceborne GNSS-Reflectometry from Galileo and BeiDou Satellites. Remote Sens. 2022, 14, 35. https://doi.org/10.3390/rs14010035
Nan Y, Ye S, Liu J, Guo B, Zhang S, Li W. Signal-to-Noise Ratio Analyses of Spaceborne GNSS-Reflectometry from Galileo and BeiDou Satellites. Remote Sensing. 2022; 14(1):35. https://doi.org/10.3390/rs14010035
Chicago/Turabian StyleNan, Yang, Shirong Ye, Jingnan Liu, Bofeng Guo, Shuangcheng Zhang, and Weiqiang Li. 2022. "Signal-to-Noise Ratio Analyses of Spaceborne GNSS-Reflectometry from Galileo and BeiDou Satellites" Remote Sensing 14, no. 1: 35. https://doi.org/10.3390/rs14010035
APA StyleNan, Y., Ye, S., Liu, J., Guo, B., Zhang, S., & Li, W. (2022). Signal-to-Noise Ratio Analyses of Spaceborne GNSS-Reflectometry from Galileo and BeiDou Satellites. Remote Sensing, 14(1), 35. https://doi.org/10.3390/rs14010035