
An Efficient Ground Moving Target Imaging Method for Airborne Circular Stripmap SAR


Abstract
:1. Introduction
1.1. Background of Airborne CSSAR and Ground Moving Target Imaging
1.2. Objectives of this Paper
2. Proposed Range Model for CSSAR
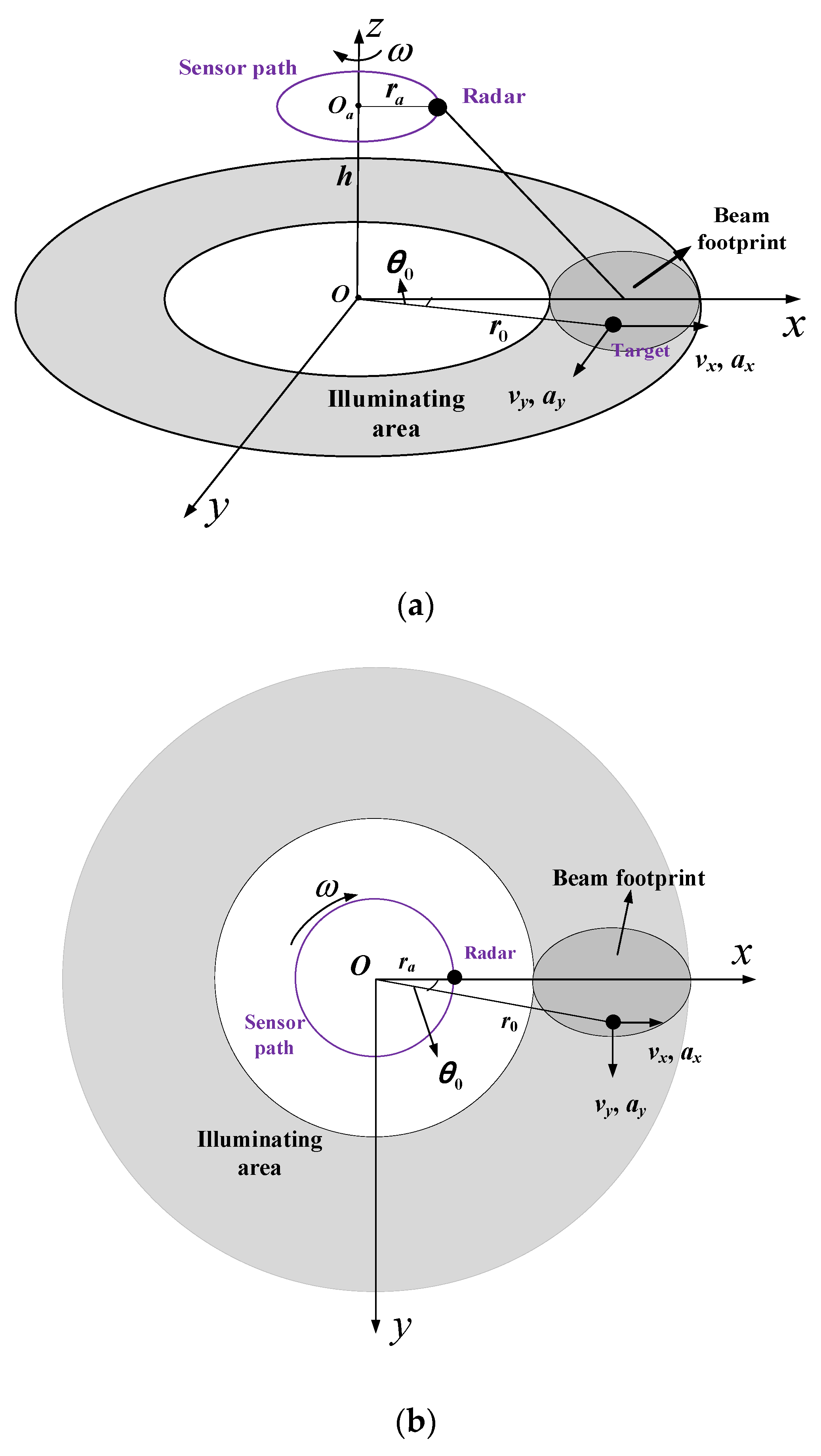
2.1. Geometry
2.2. Proposed Range Model
3. Target’s 2-D Spectrum Based on the Proposed Range Model
4. Proposed Imaging Method
4.1. Optimization Modeling
4.2. Solving the Optimization Problem via GA
- (1)
- Step 1—Coding: Each individual chromosome of the population is encoded as a binary string with a fixed length. The length of the string depends on the range of the parameters to be searched and the required accuracy. For example, the length of the string for the parameter ve should be , where lve is the length of the string for ve, and is the encoding accuracy for ve.
- (2)
- Step 2—Population initialization: The population size NP, the maximum number of generations Gmax, and the generation counter g are initialized. All individuals of the population in the 0th generation are generated randomly.
- (3)
- Step 3—Calculating the fitness: Since the optimization problem is based on maximizing the contrast of the target’s image, the fitness value of a chromosome is chosen to be the contrast of the image that is focused with the parameters corresponding to this chromosome. The image is obtained via (26), and the contrast is calculated via (25).
- (4)
- Step 4—Selection: The selection operation keeps good chromosomes and eliminates inferior ones. In this paper, to improve the efficiency, the roulette wheel selection rule [33] is adopted, and the selection probability for each chromosome is calculated as follows:where f (·) is the fitness function, and CPg,n is the nth chromosome of the population in gth generation. In addition, the optimal individual preservation strategy [32] is used. In other words, the optimal individual of the parent population will directly enter the offspring population.
- (5)
- Step 5—Crossover and mutation: In this paper, the single-point crossover operator and simple mutation operator [33] are applied to the selected chromosomes to produce the population of the next generation.
- (6)
- Step 6—Judgment: If g is equal to Gmax or the maximum fitness value remains stable, jump to step 7. Otherwise, return to step 3.
- (7)
- Step 7—Output the optimal solution: The chromosome that has the largest fitness value is the optimal solution, and the corresponding parameters are the solutions for the optimization problem. To obtain the solutions for the optimization problem, a decoding operation should be performed with two steps (taking ve for example): (1) convert the binary string to the decimal number ve’; (2) calculate the actual value of ve by (29).
4.3. Flowchart of the Proposed Imaging Method
5. Experimental Results
5.1. Validation of the Proposed Range Model
5.2. Validation of the Proposed Imaging Method
6. Discussions
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Symbols
| h | Height of the aircraft |
| ω | Angular velocity of the aircraft |
| ra | Flying radius of the aircraft |
| ta | Azimuth slow time |
| r0 | Distance from the target to the coordinate origin |
| θ0 | Azimuth angle of the target |
| vx | Target’s velocity along the x-axis |
| vy | Target’s velocity along the y-axis |
| ax | Target’s acceleration along the x-axis |
| ay | Target’s acceleration along the y-axis |
| Rc | Distance from the target to the radar at the beam center crossing time |
| tac | Beam center crossing time of the target |
| l1 | Coefficient of the first-order term of the Taylor-approximated range model |
| l2 | Coefficient of the second-order term of the Taylor-approximated range model |
| l3 | Coefficient of the third-order term of the Taylor-approximated range model |
| rc | Distance from the target to the coordinate origin at the beam center crossing time |
| vtc | Projection of the target’s velocity onto the vertical direction of the radar platform velocity at the beam center crossing time |
| atc | Projection of the target’s acceleration onto the vertical direction of the radar platform velocity at the beam center crossing time |
| vta | Projection of the target’s velocity onto the direction of the radar platform velocity at the beam center crossing time |
| ata | Projection of the target’s acceleration onto the direction of the radar platform velocity at the beam center crossing time |
| θc | Target’s azimuth angle at the beam center crossing time |
| ve | Variable introduced in the proposed range model, its unit is m/s |
| α | Variable introduced in the proposed range model, its unit is m2/s |
| β | Variable introduced in the proposed range model, its unit is m/s |
| Ta | Synthetic aperture time |
| θbw | 3 db beamwidth of the radar |
| ρa | Azimuth resolution |
| vg | Velocity of the beam footprint along the ground |
| va | Velocity of the radar platform |
| wr (·) | Range envelope |
| wa (·) | Azimuth envelope |
| tr | Range time |
| kr | Chirp rate of the transmitted signal |
| c | Speed of light |
| fc | Carrier frequency |
| fr | Range frequency |
| Wr (·) | Range frequency envelope |
| fa | Azimuth frequency |
| Wa (·) | Azimuth frequency envelope |
| lve | Length of the string for ve |
| Δve | Encoding accuracy for ve |
| CPg,n | nth chromosome of the population in gth generation |
| Ka | Doppler chirp rate |
| Δα | Encoding accuracy for α |
| Δβ | Encoding accuracy for β |
| PRF | Pulse repetition frequency |
| fac | Doppler center frequency |
| Na | Number of azimuth samples of data |
| Nr | Number of range samples of data |
| N | 1-D size of the data |
Appendix A
References
- Moreira, A.; Prats-iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.P.; Papathanassiou, K. A Tutorial on Synthetic Aperture Radar. IEEE Mag. Geosci. Remote Sens. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Jäger, M.; Pinheiro, M.; Ponce, O.; Reigber, A.; Scheiber, R. A Survey of Novel Airborne SAR Signal Processing Techniques and Applications for DLR’s F-SAR Sensor. In Proceedings of the 16th International Radar Symposium (IRS), Dresden, Germany, 24–26 June 2015; pp. 1–6. [Google Scholar]
- Cantalloube, H.M.J.; Nahum, C.E. Airborne SAR-Efficient Signal Processing for Very High Resolution. Proc. IEEE. 2013, 3, 784–797. [Google Scholar] [CrossRef]
- Reigber, A.; Scheiber, R.; Jager, M.; Prats-Iraola, P.; Hajnsek, I.; Jagdhuber, T.; Papathanassiou, K.P.; Nannini, M.; Aguilera, E.; Baumgartner, S.; et al. Very-High-Resolution Airborne Synthetic Aperture Radar Imaging: Signal Processing and Applications. Proc. IEEE 2013, 3, 759–783. [Google Scholar] [CrossRef] [Green Version]
- Ren, Y.; Tang, S.Y.; Guo, P.; So, H.C.; Zhang, L.R. 2-D Spatially Variant Motion Error Compensation for High-Resolution Airborne SAR Based on Range-Doppler Expansion Approach. IEEE Trans. Geosci. Remote Sens. 2021, in press. [Google Scholar] [CrossRef]
- Jao, J.K. Theory of Synthetic Aperture Radar Imaging of a Moving Target. IEEE Trans. Geosci. Remote Sens. 2001, 9, 1984–1992. [Google Scholar]
- Bacci, A.; Martorella, M.; Gray, D.A.; Gelli, S.; Berizzi, F. Virtual Multichannel SAR for Ground Moving Target Imaging. IET Radar Sonar Navigat. 2016, 1, 50–62. [Google Scholar] [CrossRef] [Green Version]
- Zhu, D.Y.; Li, Y.; Zhu, Z.D. A Keystone Transform Without Interpolation for SAR Ground Moving-Target Imaging. IEEE Geosci. Remote Sens. Lett. 2007, 1, 18–22. [Google Scholar] [CrossRef]
- Wan, J.; Tan, X.; Chen, Z.; Dong, L.; Liu, Q.; Zhou, Y.; Zhang, L. Refocusing of Ground Moving Targets with Doppler Ambiguity Using Keystone Transform and Modified Second-Order Keystone Transform for Synthetic Aperture Radar. Remote Sens. 2021, 2, 177. [Google Scholar] [CrossRef]
- Zhu, S.Q.; Liao, G.S.; Qu, Y.; Zhou, Z.G.; Liu, X.Y. Ground Moving Targets Imaging Algorithm for Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2011, 1, 462–477. [Google Scholar] [CrossRef]
- Baumgartner, S.V.; Krieger, G. Dual-Platform Large Along-Track Baseline GMTI. IEEE Trans. Geosci. Remote Sens. 2016, 3, 1554–1574. [Google Scholar] [CrossRef]
- Hashemi, S.R.S.; Bayat, S.; Nayebi, M.M. Ground-Based Moving Target Imaging in a Circular Strip-Map Synthetic Aperture Radar. In Proceedings of the IEEE 5th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Singapore, 1–4 October 2015; pp. 835–840. [Google Scholar]
- Shao, Y.; Chen, Z.Y.; Wu, X.B. Investigation on Imaging Performance of Circular Scanning Synthetic Aperture Radar. In Proceedings of the XXXIth URSI General Assembly and Scientific Symposium (URSI GASS), Beijing, China, 16–23 August 2014; pp. 1–4. [Google Scholar]
- Liao, Y.; Wang, W.Q.; Liu, Q.H. Two-Dimensional Spectrum for Circular Trace Scanning SAR Based on an Implicit Function. IEEE Geosci. Remote Sens. Lett. 2016, 7, 887–891. [Google Scholar] [CrossRef]
- Baumgartner, S.V. Circular and Polarimetric ISAR Imaging of Ships Using Airborne SAR Sensors. In Proceedings of the 12th European Conference on Synthetic Aperture Radar (EUSAR), Berlin, Germany, 4–7 June 2018; pp. 1–6. [Google Scholar]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithm and Implementation; Artech House: Norwood, MA, USA, 2004. [Google Scholar]
- Sun, G.C.; Xing, M.D.; Xia, X.G.; Wu, Y.R.; Bao, Z. Robust Ground Moving-Target Imaging Using Deramp–Keystone Processing. IEEE Trans. Geosci. Remote Sens. 2013, 2, 966–982. [Google Scholar] [CrossRef]
- Wang, G.Y.; Xia, X.G.; Chen, V.C. Dual-Speed SAR Imaging of Moving Targets. IEEE Trans. Aerosp. Electron. Syst. 2006, 1, 368–379. [Google Scholar] [CrossRef]
- Noviello, C.; Fornaro, G.; Martorella, M. Focused SAR Image Formation of Moving Targets Based on Doppler Parameter Estimation. IEEE Trans. Geosci. Remote Sens. 2015, 2, 966–982. [Google Scholar] [CrossRef]
- Baumgartner, S.V.; Krieger, G. Multi-Channel SAR for ground Moving Target Indication. Elsevier Acad. Press Libr. Signal Process. 2014, 2, 911–986. [Google Scholar]
- Zhang, X.P.; Liao, G.S.; Zhu, S.Q.; Zeng, C.; Shu, Y.X. Geometry-Information-Aided Efficient Radial Velocity Estimation for Moving Target Imaging and Location Based on Radon Transform. IEEE Trans. Geosci. Remote Sens. 2015, 2, 1105–1117. [Google Scholar] [CrossRef]
- Huang, P.H.; Liao, G.S.; Yang, Z.; Xia, X.G.; Ma, J.T.; Zheng, J.B. Ground Maneuvering Target Imaging and High-Order Motion Parameter Estimation Based on Second-Order Keystone and Generalized Hough-HAF Transform. IEEE Trans. Geosci. Remote Sens. 2017, 1, 320–335. [Google Scholar] [CrossRef]
- Zeng, C.; Li, D.; Luo, X.; Liu, H.Q.; Su, J. Ground Maneuvering Targets Imaging for Synthetic Aperture Radar Based on Second-Order Keystone Transform and High-Order Motion Parameter Estimation. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2019, 11, 4486–4501. [Google Scholar] [CrossRef]
- Li, D.; Ma, H.N.; Liu, H.Q.; Chen, Z.Y.; Su, J.; Zhou, X.C.; Li, W.; Yang, Z.J. An Efficient Ground Maneuvering Target Refocusing Method Based on Principal Component Analysis and Motion Parameter Estimation. Remote Sens. 2020, 12, 1–22. [Google Scholar] [CrossRef]
- Huang, L.J.; Qiu, X.; Hu, D.; Ding, C. Focusing of Medium-Earth-Orbit SAR with Advanced Nonlinear Chirp Scaling Algorithm. IEEE Trans. Geosci. Remote Sens. 2011, 49, 500–508. [Google Scholar] [CrossRef]
- Li, Y.K.; Wang, T.; Liu, B.C.; Hu, R.X. High-Resolution SAR Imaging of Ground Moving Targets Based on the Equivalent Range Equation. IEEE Geosci. Remote Sens. Lett. 2015, 2, 324–328. [Google Scholar]
- Zhang, Y.; Sun, J.P.; Lei, P.; Li, G.; Hong, W. High-Resolution SAR-Based Ground Moving Target Imaging With Defocused ROI Data. IEEE Trans. Geosci. Remote Sens. 2016, 2, 1062–1073. [Google Scholar] [CrossRef]
- Jin, G.H.; Dong, Z.; He, F.; Yu, A.X. SAR Ground Moving Target Imaging Based on a New Range Model Using a Modified Keystone Transform. IEEE Trans. Geosci. Remote Sens. 2019, 6, 3283–3295. [Google Scholar] [CrossRef]
- Jao, J.K.; Yegulalp, A. Multichannel Synthetic Aperture Radar Signatures and Imaging of a Moving Target. Inverse Probl. 2013, 5, 1–33. [Google Scholar] [CrossRef]
- Yang, J.; Liu, C.; Wang, Y.F. Imaging and Parameter Estimation of Fast-Moving Targets with Single-Antenna SAR. IEEE Geosci. Remote Sens. Lett. 2014, 2, 529–533. [Google Scholar] [CrossRef]
- Yang, L.; Zhao, L.F.; Bi, G.A.; Zhang, L.R. SAR Ground Moving Target Imaging Algorithm Based on Parametric and Dynamic Sparse Bayesian Learning. IEEE Trans. Geosci. Remote Sens. 2016, 4, 2254–2267. [Google Scholar] [CrossRef]
- Srinivas, M.; Patnaik, L.M. Genetic Algorithms: A Survey. Computer 1994, 6, 17–26. [Google Scholar] [CrossRef]
- Whitley, D. A Genetic Algorithm Tutorial. Stattics Comput. 1994, 4, 65–85. [Google Scholar] [CrossRef]
- Zhang, J.; Chung, H.S.H.; Lo, W.L. Clustering-Based Adaptive Crossover and Mutation Probabilities for Genetic Algorithms. IEEE Trans. Evol. Comput. 2007, 3, 326–335. [Google Scholar] [CrossRef]
- Chen, Y.J.; Zhang, Q.; Luo, Y.; Chen, Y.A. Measurement Matrix Optimization for ISAR Sparse Imaging Based on Genetic Algorithm. IEEE Trans. Geosci. Remote Sens. 2016, 12, 1875–1879. [Google Scholar] [CrossRef]
- Shi, L.; Deng, Y.K.; Sun, H.F.; Wang, R.; Ai, J.Q.; Yan, H. An Improved Real-Coded Genetic Algorithm for the Beam Forming of Spaceborne SAR. IEEE Trans. Antennas Propag. 2012, 6, 3034–3040. [Google Scholar] [CrossRef]
- Zhang, T.; Liao, G.S.; Li, Y.C.; Gu, T.; Zhang, T.H.; Liu, Y.J. A Two-Stage Time-Domain Autofocus Method Based on Generalized Sharpness Metrics and AFBP. IEEE Trans. Geosci. Remote Sens. 2021, in press. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Carrier frequency | 10 GHz |
| Range bandwidth | 150 MHz |
| Sampling frequency | 180 MHz |
| Pulse repetition frequency | 1500 Hz |
| Azimuth resolution | 1 m |
| Illumination time | 1.69 s |
| Flying radius | 2.3 km |
| Platform altitude | 8 km |
| Platform velocity | 125 m/s |
| Ground range of scene center | 16 km |
| IRW Broadening | PSLR (dB) | ISLR (dB) | ||
|---|---|---|---|---|
| Original range model | Azimuth | 0.00% | −13.23 | −10.12 |
| Range | 0.00% | −13.26 | −10.04 | |
| Proposed range model | Azimuth | 0.00% | −13.12 | −9.86 |
| Range | 0.00% | −13.26 | −10.04 | |
| Second-order Taylor approximated range model | Azimuth | 2.03% | −11.05 | −9.06 |
| Range | 0.00% | −13.26 | −10.04 | |
| Third-order Taylor approximated range model | Azimuth | 1.35% | −12.91 | −9.25 |
| Range | 0.00% | −13.26 | −10.04 |
| vx (m/s) | vy (m/s) | ax (m/s2) | ay (m/s2) | r0 (km) | θ0 (rad) | |
|---|---|---|---|---|---|---|
| T1 | −29 | 20 | −0.5 | 0.3 | 15.8 | 0 |
| T2 | −5 | 10 | 0.1 | 0.2 | 15.9 | 0.01 |
| T3 | 21 | 10 | −0.4 | −0.3 | 16.0 | 0 |
| T4 | 5 | −5 | 0.2 | −0.5 | 16.1 | −0.01 |
| T5 | −24 | −20 | 0.5 | 0.4 | 16.2 | 0 |
| IRW Broadening | PSLR (dB) | ISLR (dB) | Ideal ISLR (dB) | ||
|---|---|---|---|---|---|
| T1 | Azimuth | 0.81% | −13.21 | −10.02 | −10.01 |
| Range | 0.00% | −13.16 | −9.79 | −9.86 | |
| T2 | Azimuth | 0.00% | −13.22 | −9.90 | −9.96 |
| Range | 0.00% | −13.22 | −9.80 | −9.86 | |
| T3 | Azimuth | 0.00% | −13.26 | −9.98 | −10.00 |
| Range | 0.00% | −13.27 | −9.88 | −9.86 | |
| T4 | Azimuth | 0.00% | −13.25 | −9.95 | −9.96 |
| Range | 0.00% | −13.22 | −9.80 | −9.86 | |
| T5 | Azimuth | 0.00% | −13.18 | −9.89 | −9.94 |
| Range | 0.00% | −13.27 | −9.90 | −9.86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Huo, T.; Yang, C.; Wang, T.; Wang, J.; Li, B. An Efficient Ground Moving Target Imaging Method for Airborne Circular Stripmap SAR. Remote Sens. 2022, 14, 210. https://doi.org/10.3390/rs14010210
Li Y, Huo T, Yang C, Wang T, Wang J, Li B. An Efficient Ground Moving Target Imaging Method for Airborne Circular Stripmap SAR. Remote Sensing. 2022; 14(1):210. https://doi.org/10.3390/rs14010210
Chicago/Turabian StyleLi, Yongkang, Tianyu Huo, Chenxi Yang, Tong Wang, Juan Wang, and Beiyu Li. 2022. "An Efficient Ground Moving Target Imaging Method for Airborne Circular Stripmap SAR" Remote Sensing 14, no. 1: 210. https://doi.org/10.3390/rs14010210
APA StyleLi, Y., Huo, T., Yang, C., Wang, T., Wang, J., & Li, B. (2022). An Efficient Ground Moving Target Imaging Method for Airborne Circular Stripmap SAR. Remote Sensing, 14(1), 210. https://doi.org/10.3390/rs14010210