
Improved Method to Detect the Tailings Ponds from Multispectral Remote Sensing Images Based on Faster R-CNN and Transfer Learning

 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data and Preprocessing
2.2. Sampling Data Generation
2.3. Methodology
2.3.1. Proposed Method
- (1)
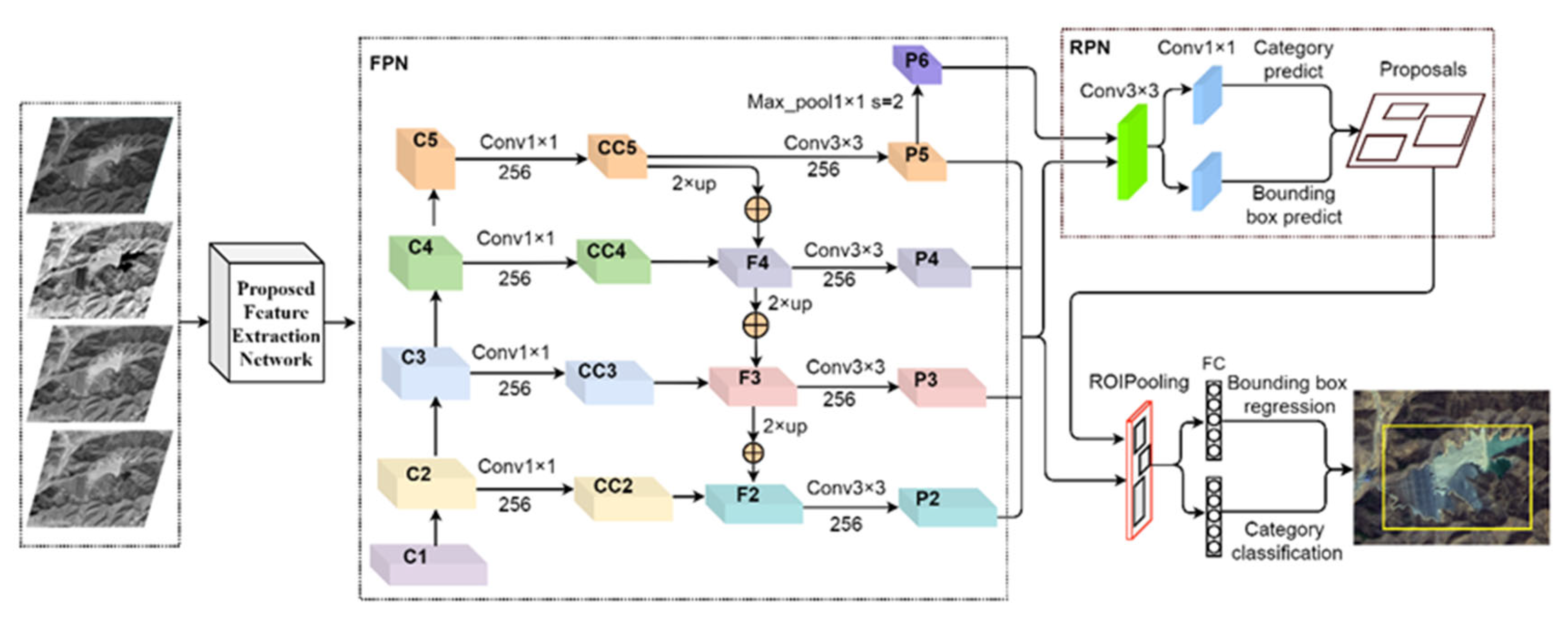
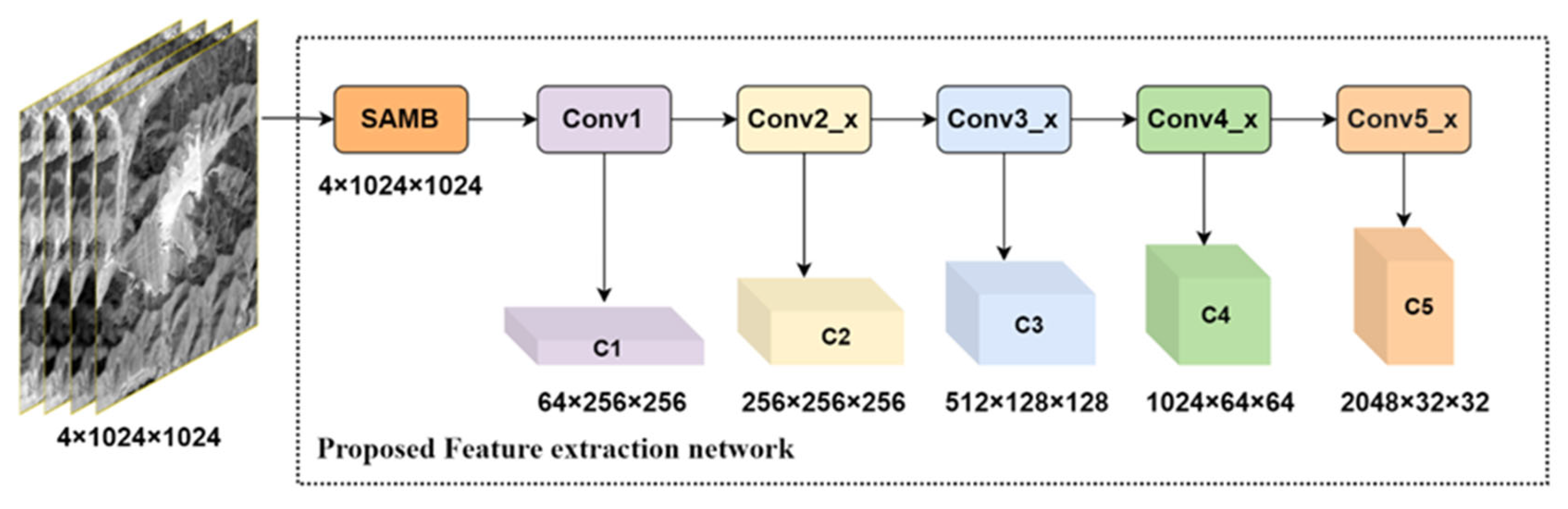
- The model inputs are the four spectral bands of GF-1 image data, namely blue, green, red, and NIR. After being passed through the proposed feature extraction network, the model outputs are multi-layer features (C1, C2, C3, C4, and C5).
- (2)
- The feature pyramid network (FPN) fuses shallow features and deep features using the semantic information of deep features and the location information of shallow features to further improve the performance of the network [25]. The multi-layer features C2, C3, C4, and C5 are the FPN inputs for feature merging, for which the number of channels are 256, 512, 1024, and 2048, respectively. First, through the 1 × 1 convolution operation (Conv1 × 1), C2, C3, C4, and C5 were subjected to dimensionality reduction, with the corresponding outputs CC2, CC3, CC4, and CC5, and the number of channels for each output was set to 256. Using the nearest neighbor difference method, CC5, CC4, and CC3 were up-sampled twice (2× up), and element-wise addition (
![Remotesensing 14 00103 i001]() ) was performed on CC4, CC3, and CC2 to merge the features of different layers, with the corresponding outputs F2, F3, and F4 (256 channels). A 3 × 3 convolution (Conv3 × 3) was conducted on F2, F3, and F4, generating P2, P3, and P4 (256 channels), and Conv3x3 was conducted on CC5, generating P5 (256 channel output). The maximum pooling was conducted on P5 of 1 × 1 with a stride of 2 (Max_pool 1 × 1 s = 2) and output P6 (256 channels). Features merging was completed with FPN, with the final set of feature maps being called {P2, P3, P4, P5, and P6}.
) was performed on CC4, CC3, and CC2 to merge the features of different layers, with the corresponding outputs F2, F3, and F4 (256 channels). A 3 × 3 convolution (Conv3 × 3) was conducted on F2, F3, and F4, generating P2, P3, and P4 (256 channels), and Conv3x3 was conducted on CC5, generating P5 (256 channel output). The maximum pooling was conducted on P5 of 1 × 1 with a stride of 2 (Max_pool 1 × 1 s = 2) and output P6 (256 channels). Features merging was completed with FPN, with the final set of feature maps being called {P2, P3, P4, P5, and P6}. - (3)
- The multi-scale feature maps {P2, P3, P4, P5, and P6} were sent to the region proposal network (RPN), with the anchor areas set to {322, 642, 1282, 2562, and 5122} pixels, and the aspect ratios of the anchors set to {1:2, 1:1, and 2:1} to generate region proposals.
- (4)
- The region proposals needed to slice the region proposal feature maps from {P2, P3, P4, and P5}, and the following formula were used to select the most appropriate scale:where k is the feature map layer corresponding to the region proposal, which is rounded during the calculation; k0 is the highest layer of the feature maps and, as there are four layers of feature maps in this study, we set k0 to 4; w and h represent the width and height of the region proposal, respectively; and H is the height and width of the model input. After the proposal, the feature maps were subjected to ROI pooling, and were sent to the subsequent fully connected (FC) layer to determine the object category and obtain the precise position of the bounding box. Based on the research results of [23], we improved the two following aspects:
- (1)
- The feature extraction network was improved. The number of input channels was increased from three to four, which is the number of bands in GF-1 images. Unlike most studies that use the attention mechanism to recalibrate the contribution of the extracted feature channels, we used the attention mechanism to recalibrate the contribution of the original four bands. Details of our methodology are presented in the “Proposed feature extraction network” section below.
- (2)
- A step-by-step transfer learning method was adopted to gradually improve and train the model, of which details are presented in the “transfer learning” section below.

2.3.2. Proposed Feature Extraction Network
2.3.3. Transfer Learning
2.3.4. Accuracy Assessment
2.3.5. Loss Function
2.3.6. Training Environment and Optimization
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, T.; Hou, K.P.; Guo, Z.S.; Zhang, C.L. Application of analytic hierarchy process to tailings pond safety operation analysis. Rock Soil Mech. 2008, 29, 680–687. [Google Scholar]
- Yang, J.; Qin, X.; Zhang, Z.; Wang, X. Theory and Practice on Remote Sensing Monitoring of Mine; Surveying and Mapping Press: Beijing, China, 2011. [Google Scholar]
- Jie, L. Remote Sensing Research and Application of Tailings Pond–A Case Study on the Tailings Pond in Hebei Province; China University of Geosciences: Beijing, China, 2014. [Google Scholar]
- Zhou, Y.; Wang, X.; Yao, W.; Yang, J. Remote sensing investigation and environmental impact analysis of tailing ponds in Shandong Province. Geol. Surv. China 2017, 4, 88–92. [Google Scholar]
- Dai, Q.W.; Yang, Z.Z. Application of remote sensing technology to environment monitoring. West. Explor. Eng. 2007, 4, 209–210. [Google Scholar]
- Wang, Q. The progress and challenges of satellite remote sensing technology applications in the field of environmental protection. Environ. Monit. China 2009, 25, 53–56. [Google Scholar]
- Fu, Y.; Li, K.; Li, J. Environmental Monitoring and Analysis of Tailing Pond Based on Multi Temporal Domestic High Resolution Data. Geomat. Spat. Inf. Technol. 2018, 41, 102–104. [Google Scholar]
- Zhao, Y.M. Moniter Tailings Based on 3S Technology to Tower Mountain in Shanxi Province. Master’s Thesis, China University of Geoscience, Beijing, China, 2011; pp. 1–46. [Google Scholar]
- Wu, X.; Sahoo, D.; Hoi, S.C.H. Recent advances in deep learning for object detection. Neurocomputing 2020, 396, 39–64. [Google Scholar] [CrossRef] [Green Version]
- Bai, T.; Pang, Y.; Wang, J.; Han, K.; Luo, J.; Wang, H.; Lin, J.; Wu, J.; Zhang, H. An Optimized Faster R-CNN Method Based on DRNet and RoI Align for Building Detection in Remote Sensing Images. Remote Sens. 2020, 12, 762. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef] [Green Version]
- Zambanini, S.; Loghin, A.-M.; Pfeifer, N.; Soley, E.M.; Sablatnig, R. Detection of Parking Cars in Stereo Satellite Images. Remote Sens. 2020, 12, 2170. [Google Scholar] [CrossRef]
- Wang, C.; Chang, L.; Zhao, L.; Niu, R. Automatic Identification and Dynamic Monitoring of Open-Pit Mines Based on Improved Mask R-CNN and Transfer Learning. Remote Sens. 2020, 12, 3474. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of theIEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 386–397. [Google Scholar]
- Machefer, M.; Lemarchand, F.; Bonnefond, V.; Hitchins, A.; Sidiropoulos, P. Mask R-CNN Refitting Strategy for Plant Counting and Sizing in UAV Imagery. Remote Sens. 2020, 12, 3015. [Google Scholar] [CrossRef]
- Zhao, K.; Kang, J.; Jung, J.; Sohn, G. Building extraction from satellite images using mask R-CNN with building boundary regularization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Li, Q.; Chen, Z.; Zhang, B.; Li, B.; Lu, K.; Lu, L.; Guo, H. Detection of tailings dams using high-resolution satellite imagery and a single shot multibox detector in the Jing–Jin–Ji Region, China. Remote Sens. 2020, 12, 2626. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 21–37. [Google Scholar]
- Lyu, J.; Hu, Y.; Ren, S.; Yao, Y.; Ding, D.; Guan, Q.; Tao, L. Extracting the Tailings Ponds from High Spatial Resolution Remote Sensing Images by Integrating a Deep Learning-Based Model. Remote Sens. 2021, 13, 743. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.; Liao, H. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934v1. [Google Scholar]
- Yan, K.; Sheng, T.; Chen, Z.; Yan, H. Automatic extraction of tailing pond based on SSD of deep learning. J. Univ. Chin. Acad. Sci. 2020, 37, 360–367. [Google Scholar]
- Zhang, K.; Chang, Y.; Pan, J.; Lu, K.; Zan, L.; Chen, Z. Multi-Task-Branch Framework for Tailing Pond of Tangshan City. J. Henan Polytech. Univ. (Nat. Sci.). 2020, 10, 1–11. [Google Scholar]
- Yan, D.; Li, G.; Li, X.; Zhang, H.; Lei, H.; Lu, K.; Cheng, M.; Zhu, F. An Improved Faster R-CNN Method to Detect Tailings Ponds from High-Resolution Remote Sensing Images. Remote Sens. 2021, 13, 2052. [Google Scholar] [CrossRef]
- Yu, G.; Song, C.; Pan, Y.; Li, L.; Li, R.; Lu, S. Review of new progress in tailing dam safety in foreign research and current state with development trend in China. Chin. J. Rock Mech. Eng. 2014, 33, 3238–3248. [Google Scholar]
- Lin, T.Y.; Dollar, P.; Girshick, R.; He, H.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. arXiv 2017, arXiv:1612.03144. [Google Scholar]
- Chaudhari, S.; Mithal, V.; Polatkan, G.; Ramanath, R. An attentive survey of attention models. arXiv 2020, arXiv:1904.02874. [Google Scholar] [CrossRef]
- Mnih, V.; Heess, N.; Graves, A.; Kavukcuoglu, K. Recurrent models of visual attention. In Proceedings of the Advances in Neural Information Processing Systems (NIPS), Montréal, QC, Canada, 8–13 December 2014; pp. 2204–2212. [Google Scholar]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural machine translation by jointly learning to align and translate. arXiv Prepr. 2014, arXiv:1409.0473. [Google Scholar]
- Li, Y.; Huang, Q.; Pei, X.; Jiao, L.; Ronghua, S. RADet: Refine feature pyramid network and multi-layer attention network for arbitrary-oriented object detection of remote sensing images. Remote Sens. 2020, 12, 389. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Hu, J.; Zhi, X.; Shi, T.; Zhang, W.; Cui, Y.; Zhao, S. PAG-YOLO: A Portable Attention-Guided YOLO Network for Small Ship Detection. Remote Sens. 2021, 13, 3059. [Google Scholar] [CrossRef]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation Networks. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Zhang, B.; Shi, Z.; Zhao, X.; Zhang, J. A Transfer Learning Based on Canonical Correlation Analysis Across Different Domains. Chin. J. Comput. 2015, 38, 1326–1336. [Google Scholar]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE TKDE 2010, 22, 1345–1359. [Google Scholar] [CrossRef]
- Yosinski, J.; Clune, J.; Bengio, Y.; Lipson, H. How transferable are features in deep neural networks? Adv. Neural Inf. Processing Syst. 2014, 27, 3320–3328. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spectral Band | Wavelength (um) | Spatial Resolution (m) | Swath Width at Nadir (km) | Revisit Time (d) |
|---|---|---|---|---|
| Pan | 0.45–0.90 | 2 | 69 | 41 |
| Blue | 0.45–0.52 | 8 | 69 | 41 |
| Green | 0.52–0.59 | |||
| Red | 0.63–0.69 | |||
| NIR | 0.77–0.89 |
| Sample Set | Spatial Resolution (m) | Bands Number | Size (Pixels) | Data Type (bit) | Slices Number |
|---|---|---|---|---|---|
| Train set | 2.0 | 4 | 1024 × 1024 | 8 | 1509 |
| Test set | 2.0 | 4 | 1024 × 1024 | 8 | 369 |
| Type | AP (%) | Recall (%) | Iteration Time (s) |
|---|---|---|---|
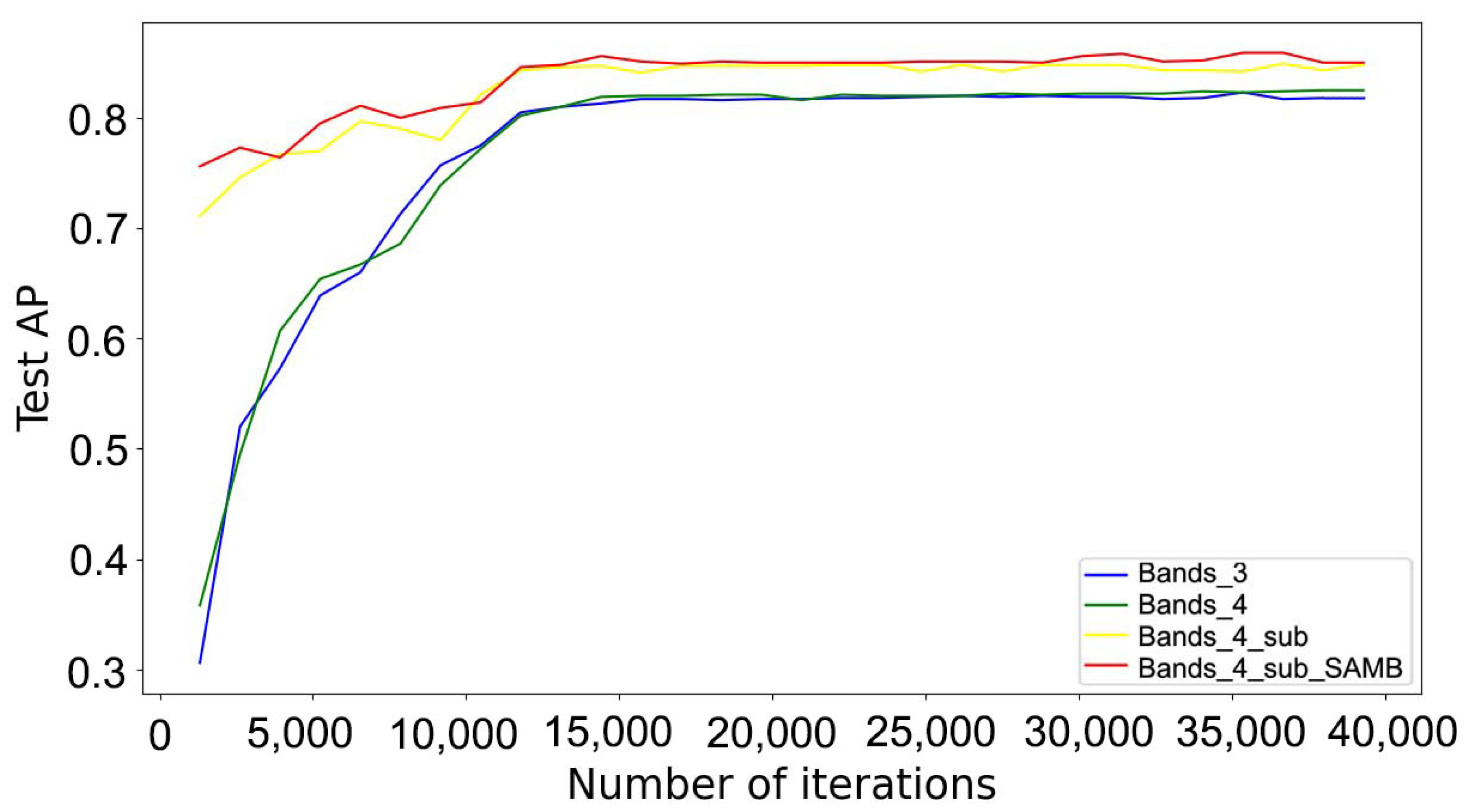
| Bands_3 | 82.3 | 65.4 | 0.387 |
| Bands_4 | 82.5 | 64.6 | 0.390 |
| Bands_4_sub | 84.9 | 70.5 | 0.392 |
| Bands_4_sub_SAMB | 85.9 | 71.9 | 0.487 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, D.; Zhang, H.; Li, G.; Li, X.; Lei, H.; Lu, K.; Zhang, L.; Zhu, F. Improved Method to Detect the Tailings Ponds from Multispectral Remote Sensing Images Based on Faster R-CNN and Transfer Learning. Remote Sens. 2022, 14, 103. https://doi.org/10.3390/rs14010103
Yan D, Zhang H, Li G, Li X, Lei H, Lu K, Zhang L, Zhu F. Improved Method to Detect the Tailings Ponds from Multispectral Remote Sensing Images Based on Faster R-CNN and Transfer Learning. Remote Sensing. 2022; 14(1):103. https://doi.org/10.3390/rs14010103
Chicago/Turabian StyleYan, Dongchuan, Hao Zhang, Guoqing Li, Xiangqiang Li, Hua Lei, Kaixuan Lu, Lianchong Zhang, and Fuxiao Zhu. 2022. "Improved Method to Detect the Tailings Ponds from Multispectral Remote Sensing Images Based on Faster R-CNN and Transfer Learning" Remote Sensing 14, no. 1: 103. https://doi.org/10.3390/rs14010103
APA StyleYan, D., Zhang, H., Li, G., Li, X., Lei, H., Lu, K., Zhang, L., & Zhu, F. (2022). Improved Method to Detect the Tailings Ponds from Multispectral Remote Sensing Images Based on Faster R-CNN and Transfer Learning. Remote Sensing, 14(1), 103. https://doi.org/10.3390/rs14010103