1. Introduction
Maritime surveillance is an important task for coastal nations in coastal conservancy, security, fishery, and managing their exclusive economic zones (EEZs) [
1,
2] where the location and motion information of the ships are especially valuable. High frequency surface wave radar (HFSWR) uses high frequency (3–30 MHz) vertical polarized electromagnetic wave, which can propagate along this surface with small attenuation, and, thus, has the capability of remote sensing of moving targets at sea. Up to now, there are more than 400 HF radar sites in operation for ocean observation globally. For example, the United States, Europe, Japan, and Australia have built nearly complete HF radar observation networks [
3], which provide real-time sea surface state parameters such as current velocity, wind speed, and wave heights. Part of these radar systems have also been used for ship detection. To increase maritime domain awareness, SeaSonde HF radar coastal ocean current and wave-monitoring networks have been used for vessel detection in New York Harbor. In April 2011, real-time vessel detection software was installed and run in parallel with the current mapping software running locally at the radar sites. Since this time, thousands of vessels have been successfully detected entering and exiting the harbor, ranging from smaller pleasure craft (15–20 m) to large shipping vessels (100+ m) [
4]. The Wellen Radar (WERA) system [
5] finds applications in oceanography and can be used to detect and track ships. A ship detection and tracking algorithm for WERA HF-radar has been developed using three-dimensional (3D) ordered-statistic (OS)-constant false alarm rate (CFAR) algorithm and a scheme similar to the well-known α-β tracker [
6]. The effectiveness of this HF-radar as a long range (≈130 km) continuous-time surveillance system is also shown in [
7]. Canada’s third-generation HFSWR system [
8,
9] uses hybrid (CFAR) detectors for ship detection, which can decrease the quantity of false detection in heavy-clutter regions and increase the target detection probabilities in the medium- and low-clutter regions. It also allows use of more advanced tracking techniques so that the system is able to maximize the probability of tracking while minimizing the probability of false alarms or other erroneous tracks. Nikolić et al. used a modified Cell Averaging Greatest of CFAR (CAGO-CFAR) for target detection in range, azimuth, and Doppler [
10] with the detection threshold relying on an assumption of Weibull distribution and an averaged signal level, which led to a higher detection probability than CAGO-CFAR. Since a major proportion of radar systems operated all over the world use compact receive antennas, the ship detection performance with compact radar is of interest. Strong sea clutter and interference are two main challenges to ship detection [
11], which usually demands a relatively high threshold for constant false alarm rate (CFAR) detection. This problem is even worse for compact radars since the small array aperture means a low spatial gain. Another challenge is the non-stationarity of the ship echoes since a relative long coherent integration time (CIT) is needed to detect such slow targets. Consequently, compact HFSWR usually has a low detection probability (
Pd), which is an urgent problem to be solved.
Ship detection is conventionally performed on the range-Doppler (RD) spectrum which is calculated using a two-dimensional (2D) Fourier transform (FT) of the radar signal. The CFAR technique uses an adaptive threshold for automatic signal detection, which is proportional to the mean power of the local clutters. One basic adaptive algorithm is the cell-averaging CFAR (CA-CFAR) method introduced by Finn and Janson [
12]. The CA-CFAR detector performs optimally in a uniform distributed clutter, but it will cause an excessive increase in the false alarms at the edge of clutter and a decrease in the detection performance in a multi-target environment. The greatest of (GO) CFAR and smallest of (SO) CFAR were proposed by Hansen and Trunk [
13,
14] to further solve the problems such as missing targets near the clutter edges due to clutter region expansion and missing small targets under multiple target situations. These conventional CFAR methods can only solve part of the problems, but also bring some extra detection losses. Moreover, they all have a poor performance in the cases of low signal-to-noise ratio (SNR) and non-stationary target.
The characteristics of the moving target in the Doppler frequency domain and the background clutter model [
15,
16] are two key factors for detection. Clutters or interference whose Doppler spectra are superimposed on the spectral peak of a ship tend to decrease
Pd. Meanwhile, because a relatively long CIT is used to detect ships, non-stationarity is also a disadvantage which may spread the signal power onto a series of Doppler bins and, thus, may also lower
Pd. The RD spectrum is insufficient to describe the local information, e.g., the duration and the change of the instantaneous frequency (IF) of a signal. If the detailed local characteristics in the time and frequency can be fully used, the moving target can be better recognized with instantaneous details of the target being achieved. Time-frequency analysis (TFA) is such an efficient tool to solve this problem. Thayaparan et al. [
17] analyzed the performances of 12 TFA methods for stationary and non-stationary target detection and concluded that the reassigned transforms provide the better signal resolution and have excellent performance in detecting non-stationary targets and, thus, can help better understand and analyze radar signals. Jangal et al. [
18] extracted sea clutter based on wavelet decomposition and reconstruction to improve the ability of target detection of HFSWR. The target signal on the RD map was enhanced by at least 20–30 dB after reconstructing the wavelet coefficients, which is very conducive to ship detection, but the weight of the wavelet coefficients is empirical rather than adaptive that needs to be adjusted continuously to obtain a better RD map. Carretero-Moya et al. [
19] proposed a target detection method based on Radon transform, but it can only detect targets with high velocities for high-resolution radar, such as millimeter wave radar. Lei and Huang [
20] used short-time Fourier transform (STFT) and image processing technology (e.g., the area growth method) to detect maneuvering target ridges with Doppler close to clutter with an over-the-horizon radar (OTHR), but this method has disadvantages of computing-intensiveness and blurry TF ridges by STFT. Grosdidier et al. [
21,
22] used morphological component analysis (MCA) method to improve target detection of HFSWR, where the separation of sea clutter and target signal can be driven by sparsity when a proper dictionary (transform) is chosen. Compared with classical CFAR techniques, MCA-CFAR shows better results on simulated data of a single target but, unfortunately, its detection performance has not been verified with real radar data. Inspired by Jangal, Lu et al. [
23] proposed a vessel detection method based on a compact-array HFSWR system, which uses principle component analysis (PCA) and wavelet decomposition to enhance the RD spectra and suppress clutter, respectively. Compared with Jangal’s method, the SNR of the target can be further improved, but disadvantages are similar because the selection of wavelet coefficients also relies on experience. Focusing on the problems in Jangal’s method, Li et al. [
24] presented an automatic ship target detection algorithm based on discrete wavelet transform (DWT). It can automatically select the optimal scale of DWT to separate point targets from background clutters with Ostu algorithm [
25], but cannot quantitatively describe the detection probability (
Pd) and the false alarm probability (
Pfa) of the target, therefore, one cannot decide whether the extracted point targets are real targets or not. To sharpen the TF ridges, Cai et al. [
26] used synchro-extracting transform (SET) and image edge detection to extract the TF ridges, which achieved improved detection of moving targets in the broadened and splitting Doppler spectrum. Hao et al. [
27] used the combination of SET and short time fractional Fourier transform (SSTFrFT) and calculated the Rényi entropy of the unit where the target is located to detect a single target with an X-band radar. This method can accurately distinguish moving targets from sea clutters, but did not give a statistical analysis of the detection.
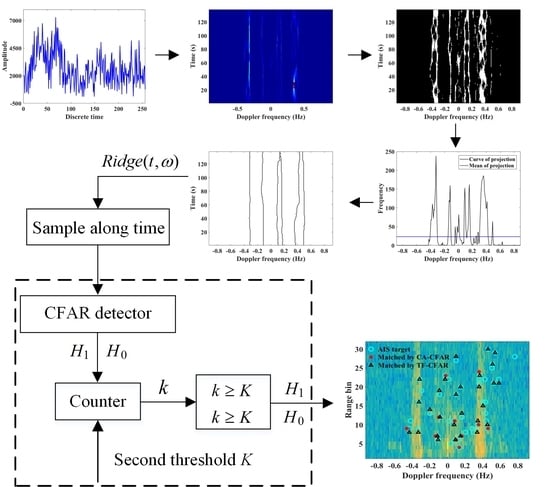
The above methods have enhanced the detection ability of non-stationary and weak targets to certain degree, but have not established the corresponding detection and false alarm probability, thus it is difficult to accurately evaluate their performances in specific applications. To this end, in this study, a joint detection method by TF-CFAR and CFAR is proposed to improve the detection probability of the target. In TF ridge detection, the time frequency representation (TFR) is first binarized, and projection along the time axis is performed to determine the coarse frequency range of the ridge according to the average and peak value of the projection. Then, the greedy search algorithm is used to extract the TF ridge in that area, and the binary integration (BI) algorithm is used to determine whether the TF ridge is a target signal. In this process, the CFAR method is involved to determine whether a TF point is a target point and whether a ridge is a target ridge. The advantage of such TF-CFAR processing is that it can lower the detection threshold of CFAR and, thus, more target signals can be recognized without increasing
Pfa. Moreover, one major feature of this TF-CFAR processing is the persistence and energy accumulation of the TF ridge, which is particularly useful for detecting non-stationary and weak targets. With the aid of automatic identification system (AIS) information, experimental evaluation of the performances of TF-CFAR methods for ship detection becomes easier than ever. The dataset used here is collected by the broad-beam HF radar named the Ocean State Monitoring and Analyzing Radar, type SD (OSMAR-SD) [
28] working at 13.15 MHz. Compared with the conventional CFAR detection, the method proposed in this study has advantages in the number of target detection and the detection of non-stationary targets, weak targets, and targets within the first-order peak.
The remaining of this paper is organized as follows.
Section 2 describes the probability distribution model of the sea clutter for the CFAR method.
Section 3 presents the TF-CFAR detection method and describes the TF ridge extraction and detection. Experimental evaluation of the joint processing results is described in
Section 4.
Section 5 gives some discussions.
Section 6 gives a brief conclusion.
4. Experimental Results
The ship signals are detected in the frequency domain and the TF domain by CFAR and TF-CFAR methods, respectively, and the detection results by the two methods are verified by AIS information [
43,
44]. Moreover, CFAR used here is a 2D (range-Doppler) CA-CFAR algorithm for target detection. The target recognition criterion is that the distance is less than or equal to a range bin, and the speed is less than or equal to three times the radar radial velocity resolution.
Table 1 gives the operating parameters of the compact HFSWR OSMAR-SD.
The radar involved in this study was located at Dongshan Island, Fujian, China in September 2015. There were many ship targets in the radar field of view.
Figure 5 shows the AIS track of some ships on 25 September 2015.
4.1. Target Matching
TF-CFAR is a second-level detection, while traditional CFAR detection is a first-level detection. CFAR is used in the first level of TF-CFAR, and the detection results of TF-CFAR are compared with CFAR. With the aid of AIS information, the matched target map by TF-CFAR and CFAR methods on the RD power spectrum is achieved. One example is given below, where
Pfa of the TF-CFAR and CFAR methods are both 0.01.
Figure 6 shows the target-matching RD map by CFAR, TF-CFAR, and AIS. Under the condition of the same
Pfa, most of the targets matched by the TF-CFAR and CFAR methods are located in the region between the positive and negative first-order peaks, and the number of targets matched by the TF-CFAR method is more than that by CFAR. Meanwhile, the numbers of targets matched by the two methods are quite different, mainly because the first-level false alarm probability before the BI reduces the target detection threshold, which makes TF-CFAR detect and match more targets than CFAR. It can be seen from the RD map that there exists a difference between the matched targets by the TF-CFAR and CFAR methods.
Figure 7 shows two examples of the target-matching maps with the same and different matching results by the two detectors, respectively. On 25 September 2015, the targets were simultaneously detected by both methods, occupying 68.13% of the matched targets by CFAR, while occupying only 25.95% of those by TF-CFAR. This means the TF-CFAR can report more matched detections than CFAR, which coincides with our expectation. However, there are also part of targets which are only detected by one method but cannot be detected by the other one. This result is a bit surprising and worthy of further study.
4.2. Target Both Matched by TF-CFAR and CFAR
To what degree the targets matched by TF-CFAR can cover those by CFAR is a great concern. The targets simultaneously matched by both detectors are analyzed first, and here an example of such case is given.
Figure 8 shows the detection process and results for two targets (namely Targets 1 and 2) by the two methods.
Figure 8a gives the target-matching RD map. In
Figure 8b, the red dash-dot line and the cyan vertical dash line show the target decision threshold for CFAR and TF-CFAR, respectively. According to the second-level
Pfa of TF-CFAR, the first-level
Pfa−CA is calculated, and the corresponding decision threshold is determined. The threshold for TF-CFAR is significantly smaller than CFAR. Meanwhile, the targets matched by both methods are basically located between the first-order peaks. The TF image at the 7th range bin is shown in
Figure 8c, where the first-order peaks have been removed from the TF image for clarity, and the corresponding detected TF ridges are shown in
Figure 8d. The TF ridge trajectories coincide well with the TF image, which can satisfy the needs of target detection. Compared with the noise, the target signals have more concentrated energies and larger amplitudes, and the TF ridges last for a longer time and changes more slowly (see
Figure 8c).
4.3. Target Matched by TF-CFAR and Unmatched by CFAR
Figure 9 shows the detection results matched by TF-CFAR whereas unmatched by CFAR. It can be observed from
Figure 9b that, there is a target (marked as Target 3) in the negative first-order Bragg peak. Since the detection threshold for CFAR is much higher than the echo spectrum in that region, the target cannot be detected. However, the TF ridge of the target signal can be extracted by TF-CFAR and, thus, the target can be regarded as a matched record. As shown in
Figure 9c, there are two TF ridges in the negative first-order peak. When the greedy algorithm is used to search the TF ridge, the TF ridge with the greater energy is extracted, which is shown in
Figure 9d. In
Figure 9e, there are two weak and broadening targets (marked as Targets 4 and 5) near −0.09 and 0.10 Hz, respectively. At these frequencies, CFAR also requires detection thresholds greater than the target signals and, thus, fails to detect them, but TF-CFAR can successfully recognize both targets, as shown in
Figure 9g. And, it can be seen, Targets 4 and 5 appear to be non-stationary, which contributes partly to the weakness in the Doppler spectrum. Therefore, TF-CFAR has an ability to extract non-stationary, weak targets.
4.4. Target Matched by CFAR and Unmatched by TF-CFAR
There are also a small number of targets which can be matched by CFAR but unmatched by TF-CFAR.
Figure 10 shows an example in such a case, marked as Target 6. It can be seen that Target 6 exceeds the detection threshold of CFAR (
Figure 10b), but fails to be detected by TF-CFAR. This is mainly because it is very close to other suspected target ridges on the TF image, as shown in
Figure 10c.
Figure 10d gives the binary gray projection curve, from which we can see that the average gray projection value failed to distinguish the extraction boundaries of the two targets with such close frequencies, resulting in the missed detection. This is a shortcoming of TF-CFAR. Additionally, the change of the two TF ridges in
Figure 10c are relatively large, and split and overlapping occur from time to time. This makes the gray projection area of the two ridges greater than the average gray projection value, so only the ridge with a greater energy can be extracted in this two-target case. Therefore, for multiple targets with close frequencies, TF-CFAR does not perform as well as CFAR.
4.5. Statistical Analysis of Matched Targets
To better understand the detection performance, a statistical comparison between TF-CFAR and CFAR is implemented.
Figure 11 shows the 3D distributions of the azimuths, ranges, speeds, and accelerations of the ship records on 25 September 2015. The ships mainly gathered within 80 km, the radial velocities were between ±10 m/s, and the acceleration of the ships were mainly between ±0.2 m/s
2. A positive radial velocity means a ship movement toward the radar, and a negative velocity means a ship movement away from the radar. The distribution of the targets matched by CFAR and TF-CFAR are similar. With the same
Pfa of 0.01, TF-CFAR provides much more matched targets than CFAR, and particularly its performance in detecting weak targets is much superior to the CFAR method.
Figure 12 shows the distributions of the targets matched by TF-CFAR and CA-CFAR under different SNRs on four days of radar data. The SNRs of the AIS-reported ships are between −20 and 50 dB, and the number of ships presents an asymmetric distribution with the maximum number at the bin of 0–10 dB. The SNRs of the matched targets are in the range of −10 to 50 dB. Although both methods show a similar trend with respect to SNR, the difference between them is obvious. The matched targets by CA-CFAR are mainly concentrated between 10 and 30 dB, while those by TF-CFAR are mainly between 0 and 20 dB, and the numbers of matched targets by TF-CFAR are greatly increased. For weak targets below 0 dB, CA-CFAR almost loses its detection ability, whereas TF-CFAR can still achieve a match rate of about 4%.
Table 2 gives the statistics of matched targets under different SNR on 25 September 2015. It reveals that, out of the total number matched by CFAR, the number below 10 dB only occupies 5.77%, whereas the percentage increases to 46.43% by TF-CFAR. As the SNR increases, the match rates, i.e., the ratios of the matched number to the total matched number, of both methods also increase, and their differences decrease correspondingly. The ability to detect weak targets is limited by the high threshold by CFAR, while it can be greatly improved by TF-CFAR.
To better understand the detection performance of the proposed TF-CFAR detector, other types of CFAR detectors are also evaluated with the same dataset. Greatest of (GO) CFAR performs well at the clutter edge, but it is incompetent in case of multiple targets, which occurs frequently in HFSWR data. Smallest of (SO) CFAR has a better target resolution when the interfering target is located in the former or latter moving window, so its detection performance is better. Ordered statistics (OS) CFAR can simultaneously alleviate the problems in cases of clutter edge and multiple targets. A censored mean-level detector (CMLD) processor has similar performance as OS processor when the numbers of reference units and the samples that are not involved in the clutter intensity estimation are the same. A trimmed mean (TM) processor actually performs somewhat better than the OS and CMLD detectors. In a multi-target environment, these OS-type (e.g., OS, CMLD, and TM) detectors have certain advantages over the mean level (ML) detectors, because they remove some reference units which may contain interfering signals. The probability that target echoes enter the estimation of clutter intensity can be decreased and, thus, the clutter intensity should be more reasonable. However, both OS and ML detectors have a poor detection performance for weak and non-stationary targets.
Table 3 shows the numbers of matched targets and the match rates of eight CFAR methods under the condition of
Pfa = 0.01. The number of AIS records is 21,389. Here for a better comparison, the TF-CFAR without BI is also tested, where the detection cells are randomly selected from the extracted time-frequency ridges for further detection. As can be seen, TF-CFAR greatly increases the number of matched targets compared with the other CFAR detectors. The match rate of TF-CFAR is close to 60%, that of TF-CFAR without BI is about 35%, while those of the other CFAR methods are all below 26%. Therefore, TF-CFAR is very beneficial to the ship detection owing to both the TF and BI processing.
It may be unreliable to directly compare the number of detected targets and matched targets by different methods, because a larger number of detected targets generally means a greater match rate yet also introduces more false alarms. For this reason, it is a better choice to compare the numbers of matched targets under similar numbers of detected targets or compare the numbers of detected targets under similar numbers of matched targets.
Table 4 shows the number of matched targets of eight CFAR methods under approximately equal number of detection targets. The
Pfa of TF-CFAR is set to 0.01. The number of matched targets by TF-CFAR is about 11% greater than that by TF-CFAR without BI, and 32–36% greater than those by the non-TF-type CFAR methods.
Figure 13 shows the numbers and the percentages of the matched targets out of the detected targets for different numbers of detected targets. Since the numbers of matched targets by the mean level and OS-type CFAR detectors are similar (see
Table 4), only CA-CFAR and OS-CFAR are selected for comparison here. When the number of detected targets is small, the threshold for each CFAR detector is so high that only the targets with sufficiently high SNRs can be detected, and, thus, the difference between these detectors is small. On the contrary, when the number of detected targets is getting larger, the threshold of each CFAR detector is getting smaller, more target signals can be detected, and, thus, the advantage of TF-CFAR can be seen more obviously. The number and the percentage of matched targets out of detected targets of TF-CFAR are greater than those of CA-CAFR and OS-CFAR in all these cases mainly due to the superiority of TF-CFAR in detecting weak and non-stationary targets.
The number of detected targets to maintain a certain match rate is also important in the detection. For a fair comparison, the non-TF CFAR detectors in
Table 3 are intentionally adjusted to achieve similar numbers of the matched targets as that of TF-CFAR without BI, say 7448. The detection results are given in
Table 5, where it can be seen that the non-TF-type CFAR methods need to detect targets about 1.14–1.24 times that TF-CFAR without BI needs. Meanwhile, TF-CFAR only needs to detect targets about 81% of that TF-CFAR without BI needs. This again shows the advantage of TF-CFAR.
The range-time plots of all matched targets on 25 September 2015 are given in
Figure 14. The numbers of matched targets by TF-CFAR and CA-CFAR are 7448 and 7437, and the corresponding numbers of detected targets are 33,427 and 40,699, respectively. For such a large number of detected targets, range-time trajectories are difficult to identify, so here we only show the distribution of the matched targets. As can be seen, the matched target trajectories by TF-CFAR can be more easily identified than those by CA-CFAR.
4.6. Joint Method
By detailed analysis of the experimental data, it is also found that the targets detected by TF-CFAR do not completely cover those by CA-CFAR. In addition to the intersection, i.e., the targets simultaneously matched by both methods, there are also targets only matched by one method. Consequently, joint use of both methods can further improve the probability of ship detection with a HFSWR.
Figure 15 shows the target detection and matching statistics from the radar dataset by the individual and joint methods for the 4 days of radar data. Under the same
Pfa, the detected and matched targets by TF-CFAR are both more than those by CA-CFAR. When
Pfa = 0.01, the joint TF-CFAR and CA-CFAR method increases the number of the detected targets from 75,929 to 78,933, and that of the matched targets from 13,092 to 14,681. It can also be seen that, the change of
Pfa (e.g., from 0.001 to 0.01) do can change the total numbers of detected targets by all the methods, but the numbers of matched targets are quite insensitive to it. This is a vital problem in HFSWR detection, which needs to be further studied.
Figure 16 shows the match rates of the three methods under different
Pfa for the four days of radar data. As can be seen, the match rates are below 23% by CA-CFAR, above 50% by TF-CFAR, and about 60% by the joint method. Compared with TF-CFAR alone, there is a further improvement of 3–7% in the match rate by the joint detection. TF-CFAR outperforms CA-CFAR for non-stationary and weak targets, while CA-CFAR outperforms TF-CFAR for those targets with close frequencies. Consequently, these two methods are complementary to each other to some extent, and their combination can improve the final detection probability of HFSWR targets.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}