
Autonomous Integrity Monitoring for Relative Navigation of Multiple Unmanned Aerial Vehicles

Abstract
1. Introduction
2. Integrity Monitoring for Multi-UAV Relative Navigation
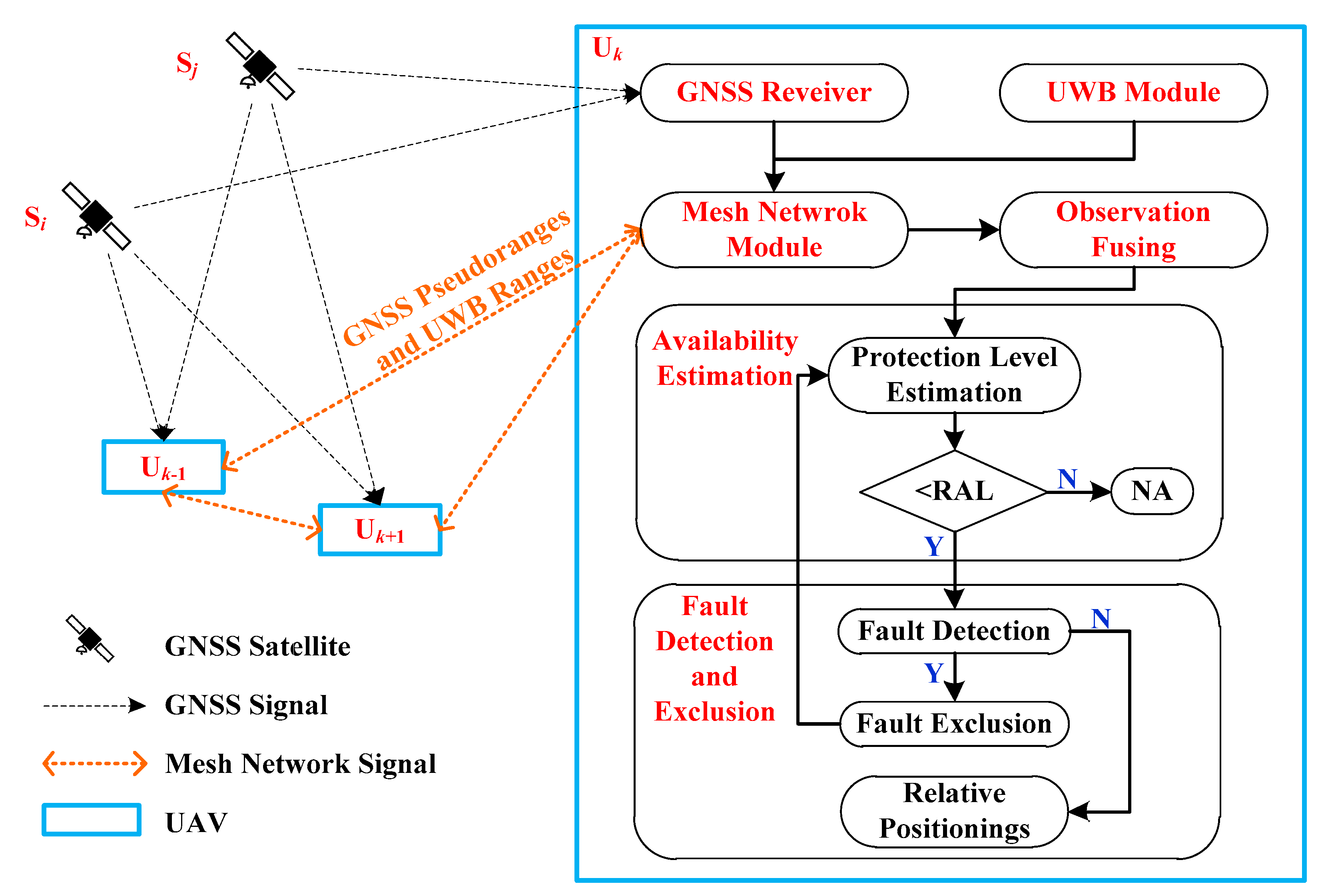
2.1. Framework
2.2. Fault Detection and Exclusion for Relative Navigation
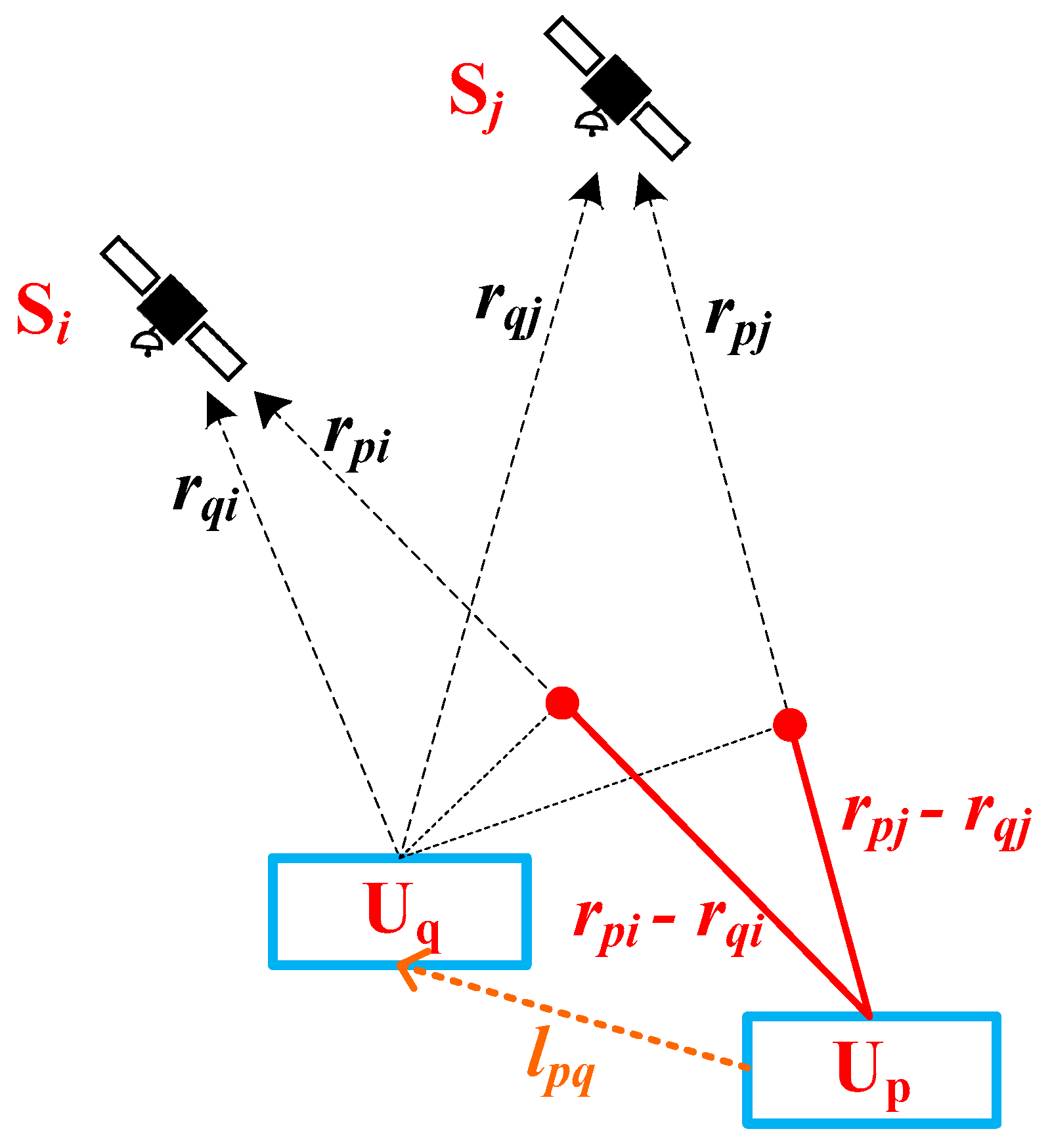
2.2.1. Observations for Relative Navigation
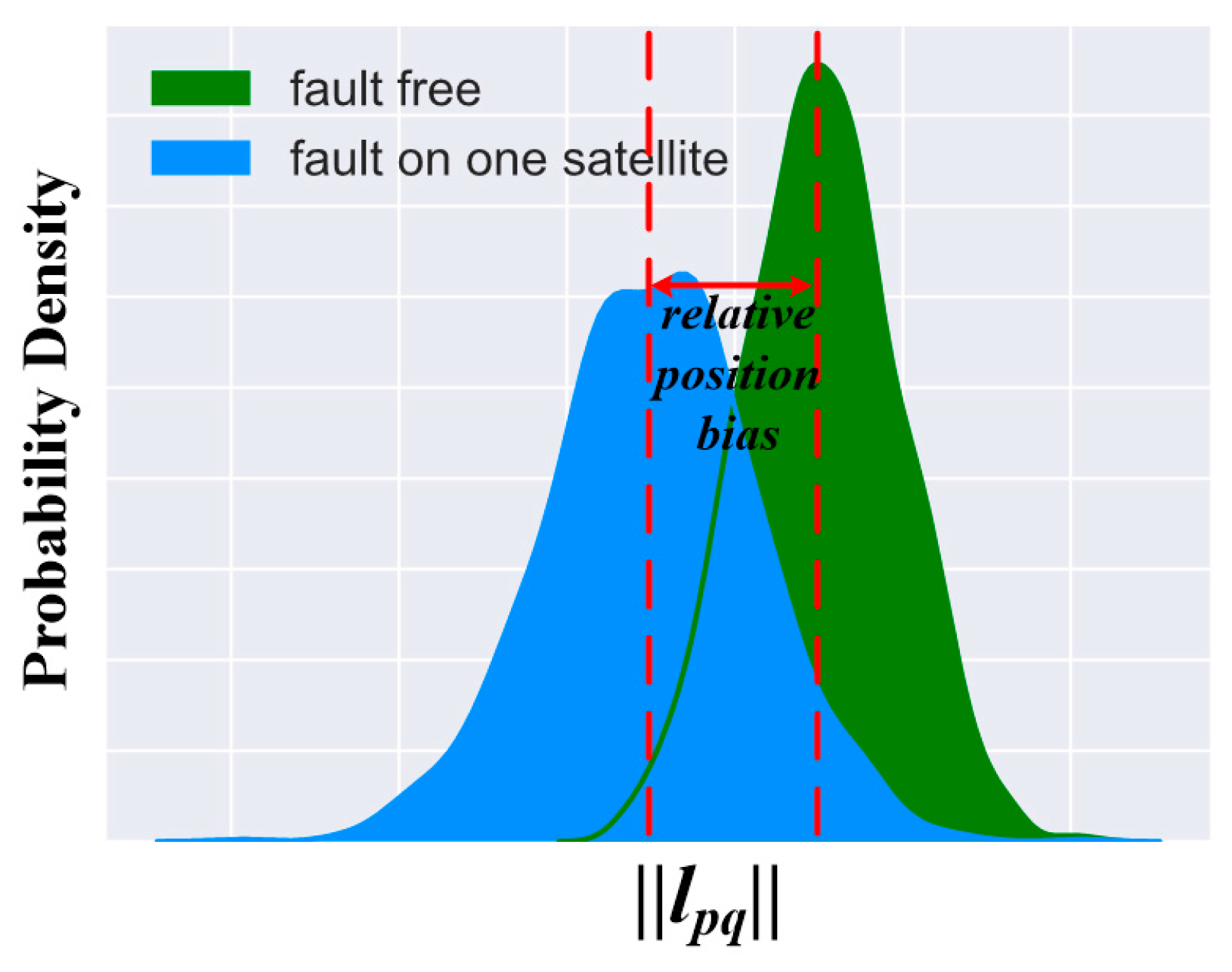
2.2.2. Fault Detection
2.2.3. Fault Exclusion
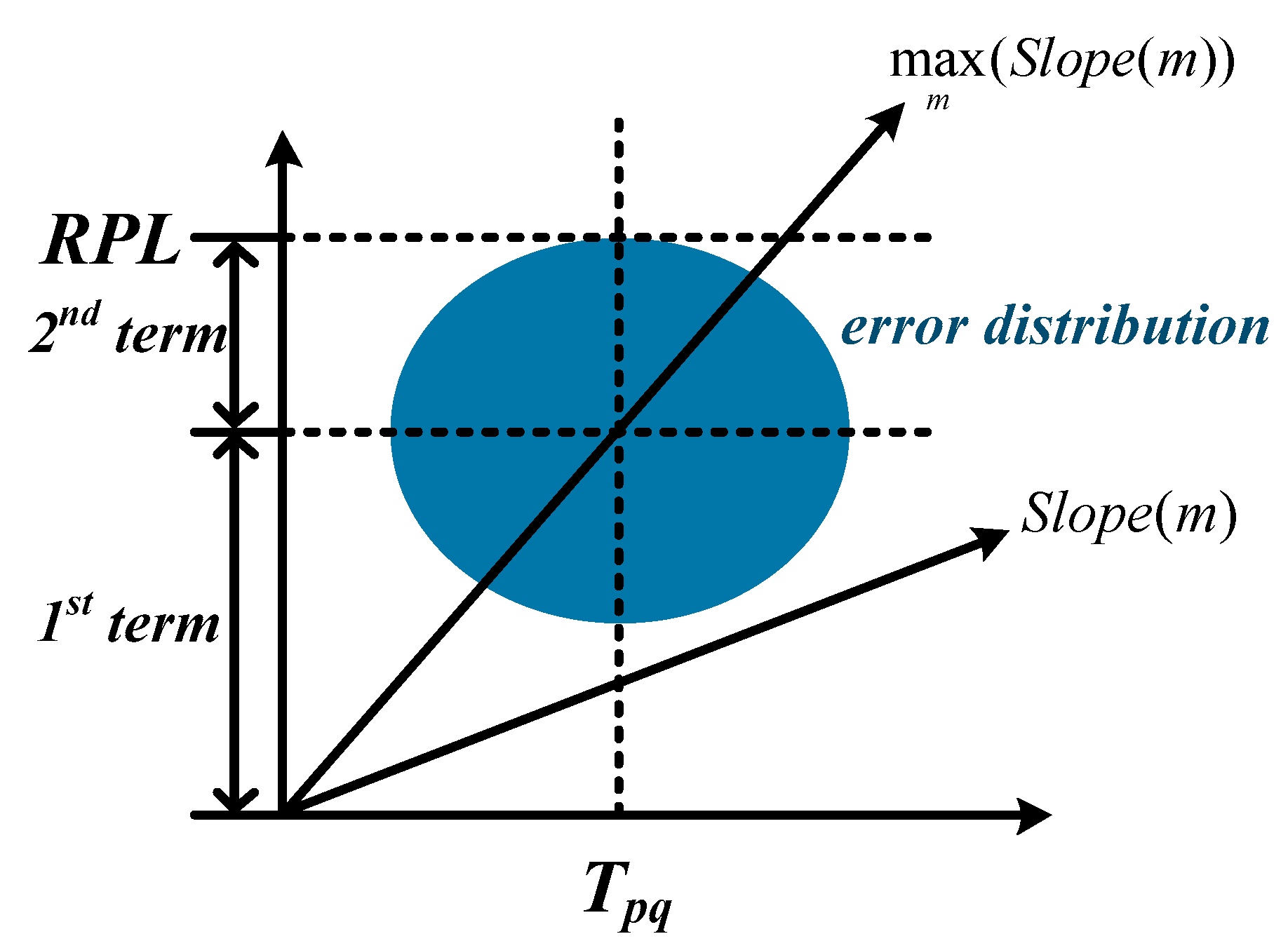
2.3. Protection Level Estimation for Relative Navigation
3. Results
3.1. Data and Experimental Setup
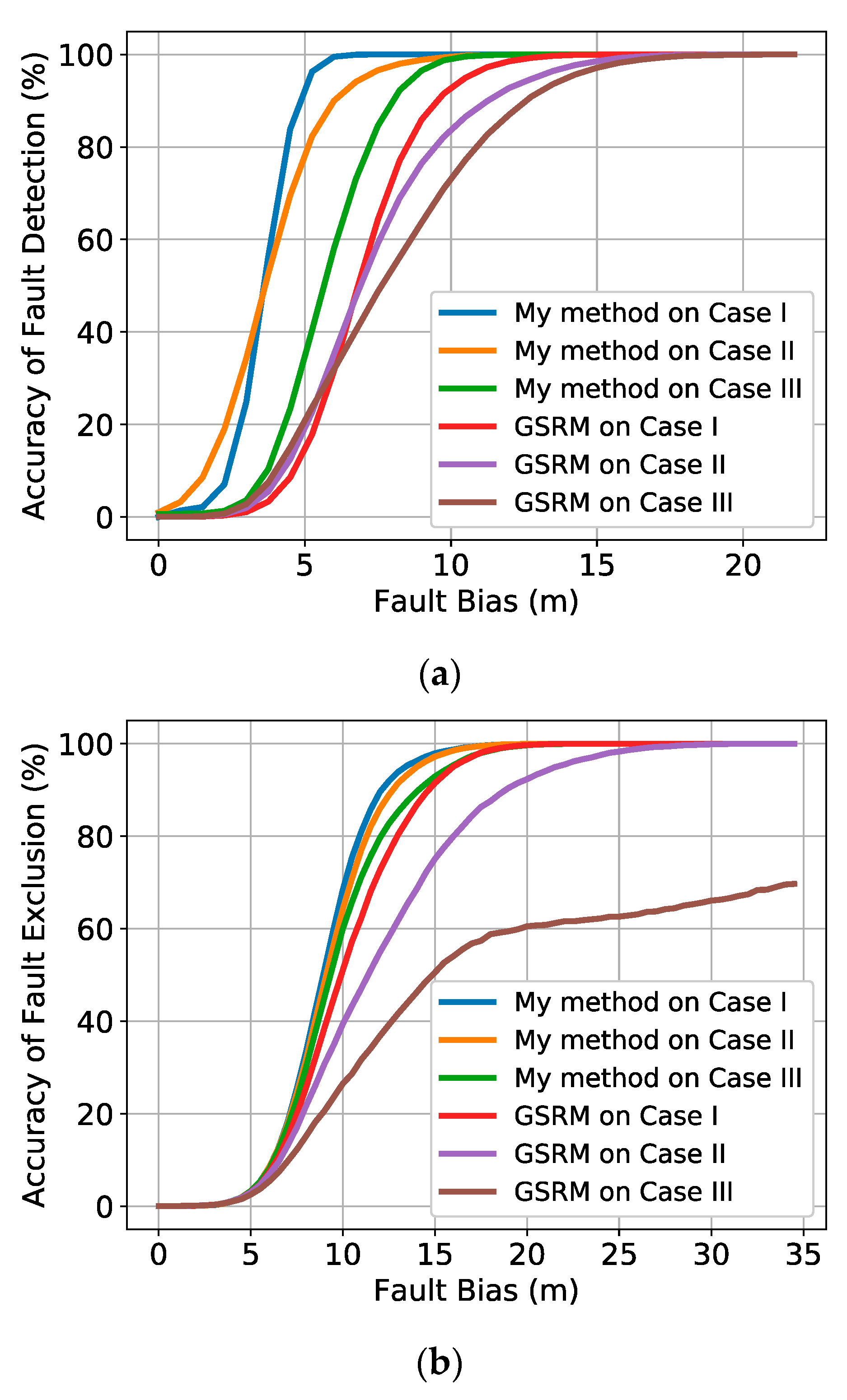
3.2. Results of Fault Detection and Exclusion
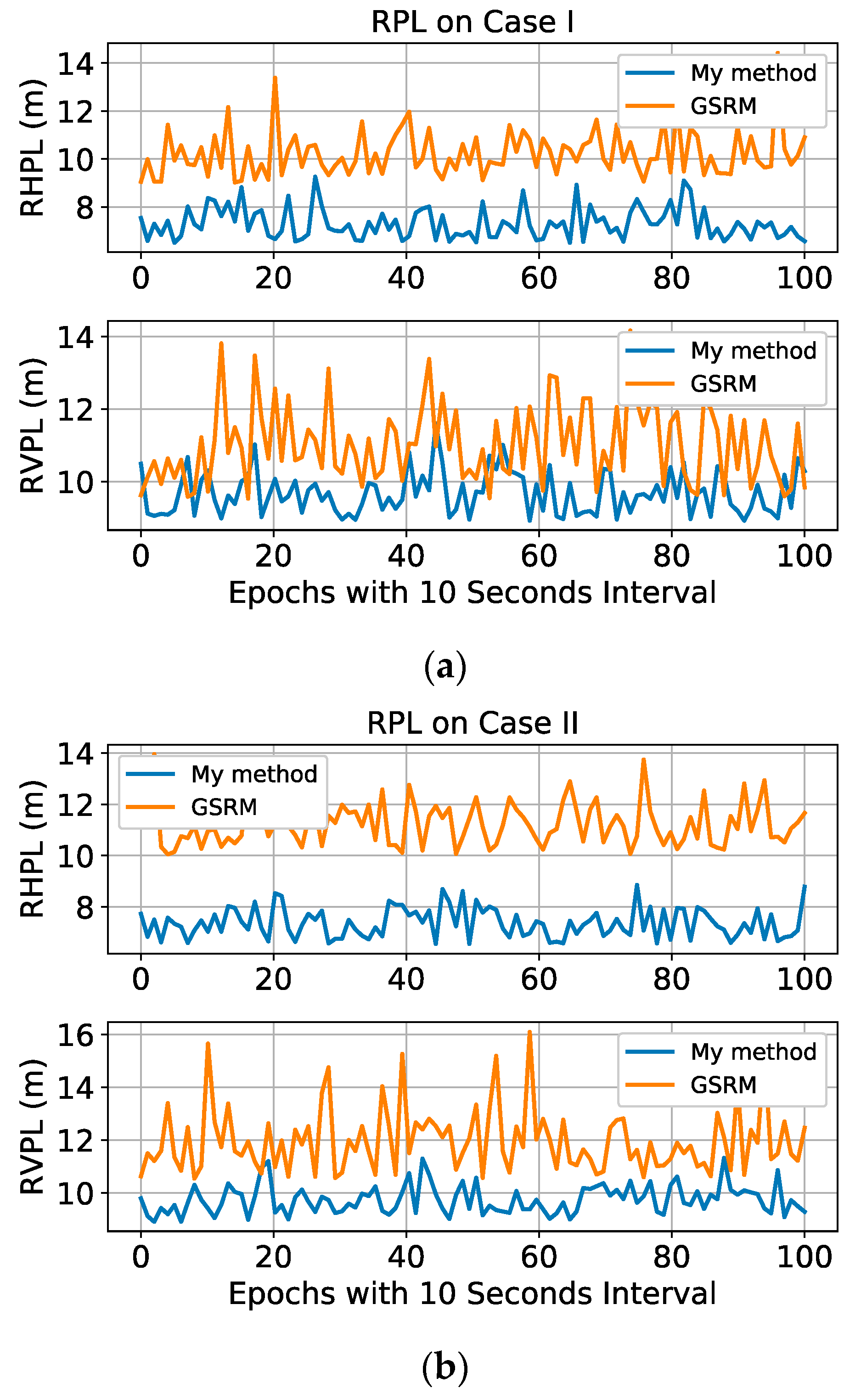
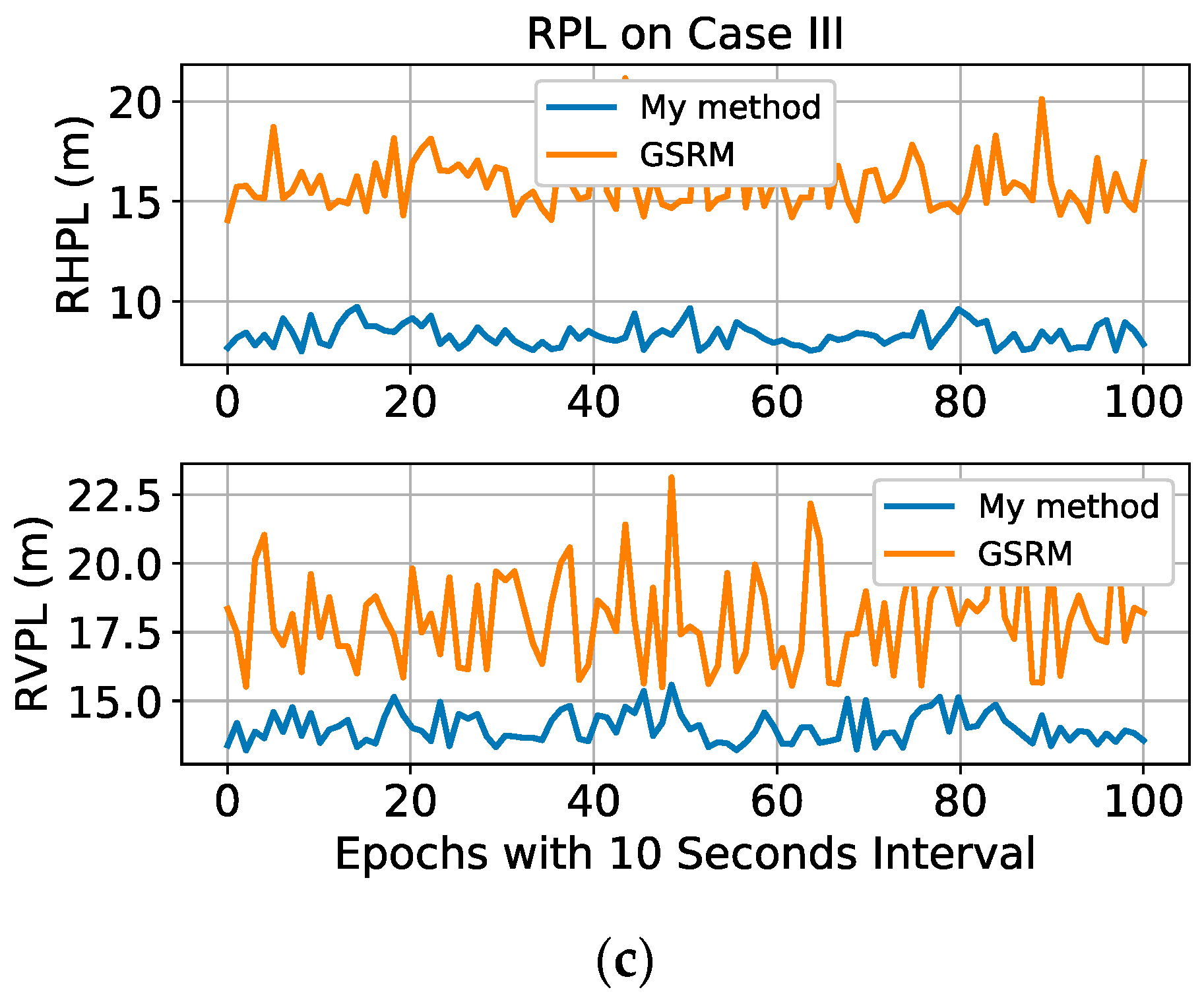
3.3. Results of Relative Protection Level
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pedro, D.; Matos-Carvalho, J.; Azevedo, F.; Sacoto-Martins, R.; Bernardo, L.; Campos, L.; Fonseca, J.; Mora, A. FFAU-framework for fully autonomous UAVs. Remote Sens. 2020, 12, 3533. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef]
- Medvedev, A.; Telnova, N.; Alekseenko, N.; Koshkarev, A.; Kuznetchenko, P.; Asmaryan, S.; Narykov, A. UAV-derived data application for environmental monitoring of the coastal area of Lake Sevan, Armenia with a changing water level. Remote Sens. 2020, 12, 3821. [Google Scholar] [CrossRef]
- Rosen, P.; Hensley, S.; Wheeler, K.; Sadowy, G.; Miller, T.; Shaffer, S.; Muellerschoen, R.; Jones, C.; Zebker, H.; Madsen, S. Uavsar: A new NASA airborne SAR system for science and technology research. In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006; pp. 1–8. [Google Scholar]
- Waibel, M.; Keays, B.; Augugliaro, F. Drone Shows: Creative Potential and Best Practices; ETH Zurich: Zurich, Switzerland, 2017. [Google Scholar]
- Rahman, S.; Kim, G.; Cho, Y.; Khan, A. Positioning of UAVs for throughput maximization in software-defined disaster area UAV communication networks. J. Commun. Netw. 2018, 20, 452–463. [Google Scholar] [CrossRef]
- Hoang, G.M.; Denis, B.; Härri, J.; Slock, D. Bayesian fusion of GNSS, ITS-G5 and IR–UWB data for robust cooperative vehicular localization. Compt. Rendus Phys. 2019, 20, 218–227. [Google Scholar] [CrossRef]
- Minetto, A.; Gurrieri, A.; Dovis, F. A cognitive particle filter for collaborative DGNSS positioning. IEEE Access 2020, 8, 194765–194779. [Google Scholar] [CrossRef]
- Ang, K.; Dong, X.; Liu, W.; Qin, G.; Lai, S.; Wang, K.; Wei, D.; Zhang, S.; Phang, S.K.; Chen, X.; et al. High-precision multi-UAV teaming for the first outdoor night show in Singapore. Unmanned Syst. 2018, 6, 39–65. [Google Scholar] [CrossRef]
- Sun, Y.; Fu, L. Real-time game theory based artificial potential field method for multiple unmanned aerial vehicles path planning. In Proceedings of the 2018 International Technical Meeting of The Institute of Navigation, Reston, VA, USA, 29 January–1 February 2018; pp. 521–528. [Google Scholar]
- Um, I.; Park, S.; Kim, H.; Kim, H. Configuring RTK-GPS architecture for system redundancy in multi-drone operations. IEEE Access 2020, 8, 76228–76242. [Google Scholar] [CrossRef]
- Vetrella, A.; Fasano, G.; Accardo, D.; Moccia, A. Differential GNSS and vision-based tracking to improve navigation performance in cooperative multi-UAV systems. Sensors 2016, 16, 2164. [Google Scholar] [CrossRef]
- Sun, R.; Zhang, W.; Zheng, J.; Ochieng, W. GNSS/INS Integration with integrity monitoring for UAV no-fly zone management. Remote Sens. 2020, 12, 524. [Google Scholar] [CrossRef]
- Sun, Y. RAIM-NET: A deep neural network for receiver autonomous integrity monitoring. Remote Sens. 2020, 12, 1503. [Google Scholar] [CrossRef]
- Fu, L.; Zhang, J.; Li, R.; Cao, X.; Wang, J. Vision-aided RAIM: A new method for GPS integrity monitoring in approach and landing phase. Sensors 2015, 15, 22854–22873. [Google Scholar] [CrossRef]
- Zabalegui, P.; De Miguel, G.; Pérez, A.; Mendizabal, J.; Goya, J.; Adin, I. A review of the evolution of the integrity methods applied in GNSS. IEEE Access 2020, 8, 45813–45824. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Gebre-Egziabher, D. Kalman filter–based RAIM for GNSS receivers. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2444–2459. [Google Scholar] [CrossRef]
- Bhatti, U.I.; Ochieng, W.Y.; Feng, S. Integrity of an integrated GPS/INS System in the presence of slowly growing errors. Part I: A critical review. GPS Solut. 2007, 11, 173–181. [Google Scholar] [CrossRef]
- Brown, R.G. A baseline GPS RAIM scheme and a note on the equivalence of three RAIM methods. Navigation 1992, 39, 301–316. [Google Scholar] [CrossRef]
- Isik, O.K.; Hong, J.; Petrunin, I.; Tsourdos, A. Integrity analysis for GPS-based navigation of UAVs in urban environment. Robotics 2020, 9, 66. [Google Scholar] [CrossRef]
- Sun, Y.; Fu, L. Autonomous fault detection and exclusion for relative positioning of multiple moving platforms using carrier phase. In Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 1639–1646. [Google Scholar]
- Wang, S.; Zhan, X.; Zhai, Y.; Chi, C.; Shen, J. Highly reliable relative navigation for multi-UAV formation flight in urban environments. Chin. J. Aeronaut. 2020, in press. [Google Scholar] [CrossRef]
- Groves, P.D.; Offer, C.R.; Mather, C.J.; Pulford, G.W.; Ashokaraj, I.A.; Macaulay, A.A. Optimizing the algorithm design for high integrity relative navigation using carrier phase relative GPS integrated with INS. In Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS), 16–19 September 2008; pp. 1323–1334. [Google Scholar]
- Calhoun, S.M.; Raquet, J. Integrity determination for a vision based precision relative navigation system. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–16 April 2016; pp. 294–304. [Google Scholar]
- Heredia, G.; Caballero, F.; Maza, I.; Merino, L.; Viguria, A.; Ollero, A. Multi-unmanned aerial vehicle (UAV) cooperative fault detection employing differential global positioning (DGPS), inertial and vision sensors. Sensors 2009, 9, 7566–7579. [Google Scholar] [CrossRef] [PubMed]
- Maaref, M.; Kassas, Z.M. UAV integrity monitoring measure improvement using terrestrial signals of opportunity. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 3045–3056. [Google Scholar]
- Rife, J. Collaboration-enhanced receiver integrity monitoring with common residual estimation. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium—PLANS, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 1042–1053. [Google Scholar]
- Margaria, D.; Falletti, E. A novel local integrity concept for GNSS receivers in urban vehicular contexts. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium—PLANS, Monterey, CA, USA, 5–8 May 2014; pp. 413–425. [Google Scholar]
- Ansari, K.; Feng, Y.; Tang, M. A runtime integrity monitoring framework for real-time relative positioning systems based on GPS and DSRC. IEEE Trans. Intell. Trans. Syst. 2014, 16, 980–992. [Google Scholar] [CrossRef]
- Xiong, J.; Cheong, J.; Xiong, Z.; Dempster, A.; Tian, S.; Wang, R. Integrity for multi-sensor cooperative positioning. IEEE Trans. Intell. Trans. Syst. 2021, 22, 792–807. [Google Scholar] [CrossRef]
- Gross, J.N.; Gu, Y.; Rhudy, M.B. Robust UAV relative navigation with DGPS, INS, and radio ranging. IEEE Trans. Autom. Sci. Eng. 2015, 12, 935–944. [Google Scholar] [CrossRef]
- Guo, K.; Qiu, Z.; Meng, W.; Xie, L.; Teo, R. Ultra-wideband based cooperative relative localization algorithm and experiments for multiple unmanned aerial vehicles in GPS denied environments. Int. J. Micro Air Veh. 2017, 9, 169–186. [Google Scholar] [CrossRef]
- Wang, S.; Almansa, C.M.; Queralta, J.P.; Zou, Z.; Westerlund, T. UWB-based localization for multi-UAV systems and collaborative heterogeneous multi-robot systems. Procedia Comput. Sci. 2020, 175, 357–364. [Google Scholar]
- Groves, P. Principles of GNSS, Inertial and Multi-Sensor Integrated Navigation Systems, 2nd ed.; Artech House Publishers: Norwood, MA, USA, 2013. [Google Scholar]
- Gerdan, G.P. A comparison of four methods of weighting double difference pseudorange measurements. Aust. Surv. 1995, 40, 60–66. [Google Scholar] [CrossRef]
- Chan, F.C.; Joerger, M.; Khanafseh, S.; Pervan, B. Bayesian fault-tolerant position estimator and integrity risk bound for GNSS navigation. J. Navig. 2014, 67, 753–775. [Google Scholar] [CrossRef]
- Brown, R. Global Positioning System: Theory and Applications; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 1996; pp. 143–165. [Google Scholar]
- GNSS Evolutionary Architecture Study, GEAS Phase-I Panel Report; FAA: Washington, DC, USA, 2008.
- Sun, Y.; Zhang, J.; Xue, R. Leveraged fault identification method for receiver autonomous integrity monitoring. Chin. J. Aeronaut. 2015, 28, 1217–1225. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, J. A new approach to calculate the horizontal protection level. J. Navig. 2016, 69, 57–74. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P.; Lee, Y.; Pervan, B.; Rippl, M.; Spletter, A. Advanced RAIM user algorithm description: Integrity support message processing, fault detection, exclusion, and protection level calculation. In Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 2828–2849. [Google Scholar]
- Milner, C.; Ochieng, W. Weighted RAIM for APV: The ideal protection level. J. Navig. 2011, 64, 61–73. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Product Name | Description | Value |
|---|---|---|
| UAV | Maximum Flight Time Maximum Speed Control Range | 60 min 15 m/s 10,000 m |
| GPS Module | Single Point Positioning (RMSE) DGPS (RMSE) Dual Frequency RTK (RMSE) Raw Data Sampling Rate | 3 m 0.9 m 1 cm 10 Hz |
| UWB Module | Center Frequency Maximum Ranging Distance Ranging Accuracy (RMSE) Raw Data Sampling Rate | 4.3 GHz 100 m 10 cm 100 Hz |
| Detection Rate for 10 m Fault Bias | 99% MDBs | Exclusion Rate for 15 m Fault Bias | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Case I | Case II | Case III | Case I | Case II | Case III | Case I | Case II | Case III | |
| My method | 100% | 99.37% | 98.71% | 5.95 m | 8.93 m | 10.42 m | 97.86% | 97.23% | 92.92% |
| GSRM | 91.48% | 82.14% | 70.93% | 12.4 m | 15.38 m | 16.86 m | 91.49% | 75.09% | 50.54% |
| Case I | Case II | Case III | ||||
|---|---|---|---|---|---|---|
| Avg. RHPL (m) | Avg. RVPL (m) | Avg. RHPL (m) | Avg. RVPL (m) | Avg. RHPL (m) | Avg. RVPL (m) | |
| My method | 7.30 | 9.68 | 7.37 | 9.75 | 8.33 | 14.03 |
| GSRM | 10.23 | 11.02 | 11.26 | 11.98 | 15.90 | 17.99 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y. Autonomous Integrity Monitoring for Relative Navigation of Multiple Unmanned Aerial Vehicles. Remote Sens. 2021, 13, 1483. https://doi.org/10.3390/rs13081483
Sun Y. Autonomous Integrity Monitoring for Relative Navigation of Multiple Unmanned Aerial Vehicles. Remote Sensing. 2021; 13(8):1483. https://doi.org/10.3390/rs13081483
Chicago/Turabian StyleSun, Yuan. 2021. "Autonomous Integrity Monitoring for Relative Navigation of Multiple Unmanned Aerial Vehicles" Remote Sensing 13, no. 8: 1483. https://doi.org/10.3390/rs13081483
APA StyleSun, Y. (2021). Autonomous Integrity Monitoring for Relative Navigation of Multiple Unmanned Aerial Vehicles. Remote Sensing, 13(8), 1483. https://doi.org/10.3390/rs13081483