1. Introduction
The Arctic plays an important role in the global climate system. In recent years, the Arctic has attracted an increased amount of attention because climate change is expected to be amplified 1.5 to 4.5 times in the region [
1,
2], which is known as “Arctic Amplification” [
3,
4,
5]. The ice and snow are considered key reasons for the amplified warming in the Arctic [
6,
7]. Compared to ice, snow cover has a higher albedo and its thermal conductivity is nearly an order of magnitude smaller than that of sea ice [
8,
9,
10,
11,
12]. As a result, snow-covered sea ice is a more effective insulator, which greatly limits the energy and momentum exchange between the atmosphere and surface, and further controls the thermal dynamic processes of snow and ice, such as the time and quantity of sea ice generation and snow melting. According to Maykut’s research, 10 cm of snow on thin ice (i.e., ice thickness less than 1 m) in winter will cause the heat flux through the interface to decrease by a factor of five [
13]. In addition, snow modifies the surface roughness of sea ice, affecting the atmosphere–ice drag coefficient and interactions [
14]. Snow depth is an essential parameter for determining the thickness of sea ice from altimeters and calculating the freshwater budget in sea ice [
15,
16]. Understanding the amount of snow on sea ice can help to provide more accurate estimates of precipitation [
17], and it is also very important for numerical simulations [
18,
19]. Therefore, accurate information concerning snow on sea ice is essential to Arctic climate change research specifically and global climate change research more generally [
15,
17,
20].
Nevertheless, due to the particular characteristics of the polar environment, it is difficult to conduct traditional in situ measurements. In contrast, satellite remote sensing is a significant means to observe the ice and snow in polar region, and microwave radiometers have become the primary sensors for snow depth observations in polar regions. In the Arctic, only products pertaining to snow depth on first-year ice (FYI) have been delivered [
17,
21,
22], while the retrieval of snow depths on multiyear ice (MYI) is still in the theoretical stage, and no operational products have been released. In 1998, Markus proposed a retrieval algorithm for snow depths on FYI [
23]. By comparing the brightness temperature (TB) from the Special Sensor Microwave Imager (SSM/I) with in situ snow depth data from the South Pole, gradient ratios of TBs between 19 and 37 GHz with vertical polarization were used to retrieve the snow depths on sea ice in the Antarctic. In 2002, Comiso applied this algorithm to the Advanced Microwave Scanning Radiometer-EOS (AMSR-E), and based on this, the National Snow and Ice Data Center (NSIDC) released a snow depth product [
17,
21,
22]. In December 2018, based on the same algorithm, NSIDC released a snow depth product from the Advanced Microwave Scanning Radiometer 2 (AMSR2) [
24]. The algorithm is based on an assumption that scattering increases with increasing snow depth, and scattering efficiency is greater at 37 GHz than at 19 GHz. For snow-free sea ice, the gradient ratio is near zero and becomes increasingly more negative as snow depth increases. Due to the limitations of this algorithm, only the snow depths on FYI can be retrieved in the Arctic. In 2006, Markus et al. [
25] found that using low-frequency channels of AMSR-E or AMSR2 might improve the capability of snow depth observation because low-frequency signals are more sensitive to deep snow and are less affected by weather, ice, and white frost inside the snow. According to this inference, Rostosky et al. [
26] derived new retrieval coefficients based on a regression analysis using five years of Operation IceBridge (OIB) airborne snow depth measurements (see
Section 2.1.2 for a definition of OIB data) and extended the algorithm to take advantage of the lower frequency channel at 7 GHz. The gradient ratios of the 18.7 and 6.9 GHz vertical TB were used for statistical regression. The root mean square error (RMSE) values of the algorithm compared with OIB data on FYI and MYI were 3.7 and 5.5 cm, respectively. In April 2019, the University of Bremen provided a snow depth dataset based on this algorithm, but it was not an operational product, with data only available in spring every year. In 2019, Kilic et al. [
27] used the Round Robin Data Package of the ESA sea ice CCI project, which contains TBs from the AMSR2 collocated with measurements from ice mass balance buoys (IMBs) and the NASA OIB airborne campaigns over Arctic sea ice. The snow depth over sea ice was estimated with an RMSE of 5.1 cm, using a multilinear regression with the TBs at 6, 18, and 36 GHz on vertical channels. Braakmann-Folgmann and Donlon [
28] proposed an artificial neural network using both AMSR2 and Soil Moisture and Ocean Salinity (SMOS) data as input to retrieve snow depths in the Arctic in 2019. Trained using seven years of OIB snow depth data, the algorithm is suitable for FYI and MYI, and the bias and the RMSE relative to OIB snow depth data were 1.1 and 4 cm. In the same year, Liu et al. [
29] constructed an ensemble-based deep neural network to retrieve snow depth by the TB from the Special Sensor Microwave Imager/Sounder (SSMIS) and used snow depth from IMB data to train the network. The bias and RMSE between the obtained snow data and the IMB data were 0.1 and 9.8 cm, respectively. In addition to these empirical algorithms, Maaß et al. proposed an algorithm for snow depth retrieval on thick ice based on radiative transfer theory using L-band TBs from SMOS [
30]. They proved the possibility of using SMOS horizontally polarized TBs to retrieve snow depths on thick ice (i.e., ice thickness greater than 1.5 m) in cold conditions.
There are some limitations to these algorithms. First, for the AMSR-E algorithm, only snow depths under 50 cm were calculated because the penetration depths of the microwave signals at 36.5 was less than 50 cm, and the algorithm is only valid for FYI in the Arctic, because the microwave signature of snow is very similar to the MYI signature, so snow depth on MYI cannot be retrieved unambiguously. Second, the algorithms introduced above directly use in situ data (or OIB data) and the observed TBs for sensitivity and correlation analysis. They are only statistical results, without considering the interaction of microwave signals in different environments of snow and ice. The analysis results lack a physical basis. Third, some algorithms (such as the Kilic algorithm [
27]) only analyze the correlation between snow depth and TB at a high sea ice concentration (SIC), which is not suitable for areas with a low SIC. At last, compared with the regression algorithm, the algorithms using neural networks or a deep learning method can obtain a better retrieval accuracy. However, they are highly dependent on the accuracy and comprehensiveness of the training dataset. When datasets used for training algorithm are not accurate (e.g., when model outputs are used in training for large domain applications or when machine learning is applied to areas where observations are missing or sparse), large deviations may occur in the calculation results [
31].
In this study, we carried out research on the retrieval of snow depth on sea ice in the Arctic using the TBs from the FengYun-3B (FY3B)/MicroWave Radiometer Imager (MWRI). Based on the transmission process of microwave signatures in ice snow, and the atmosphere, we first used a microwave radiative transfer model to simulate the changes in TBs from the FY3B/MWRI with variations in snow depths on sea ice. In the simulations results, the sensitivities of the TBs in each channel to the changes in snow depths were obtained in different conditions; the correlations between them were also analyzed. We then developed a retrieval algorithm of snow depth on sea ice using the TBs from the most sensitive channels with various combination forms and the OIB snow depths in the Arctic. Because the physical characteristics of FYI and MYIare different, we calculated the snow depths for the two types of sea ice separately. Finally, we verified the retrieval snow depths using 2011 OIB snow depth data.
3. Correlation and Sensitivity Analysis
In this study, the TBs from the FY3B/MWRI were simulated in different atmospheric and surface conditions, with different snow depths on the two types of sea ice in the Arctic. When setting the snow parameters, the atmospheric temperature and sea ice temperature on 1 January 2011 in the ECMWF ERA-I data were used. Because liquid water has a high dielectric constant and high absorption characteristics, absorption rather than scattering becomes the main attenuation factor of wet snow compared to dry snow. Therefore, the very small liquid water content in the snow will reduce the penetration depth of the microwave signal and affect the emissivity, making it difficult to calculate the snow depth [
44,
45,
46,
47]. For example, in wet snow with a liquid water content of about 1%, a TB of around 10.7 GHz is about 10 K higher than that of dry snow at the same temperature, and the difference can be as high as 100 K at 37 GHz [
48]. Therefore, to clarify the sensitivity of the TB to snow depth, only the TB of dry snow was simulated, that is, the input water content was set to zero. The snow particle size setting is usually related to snow density, and the correlation length can be determined according to the snow density and particle size [
38,
49,
50].
Due to the different physical characteristics of FYI and MYI, such as density, particle size, and salinity, simulations were carried out for FYI and MYI separately in this study. First, the density of MYI is lower than that of FYI in the upper layers. This is because of the increased porosity in sea ice due to the evacuation of brine inclusions and the enlargement of brine cavities during the melt season. Second, the salinity of MYI is lower than that of FYI too. As with the temperature rising during the melting season, ice goes into a solution in the brine to produce new lower equilibrium salinities. Melting snow and sea ice then provide a source of fresh water percolating through the sea ice and greatly reducing the salinity [
51]. The density of sea ice will affect the volume scattering, while salinity will affect the emissivity of sea ice through the change of the dielectric constant, resulting in a different reflectivity of the ice snow interface, which will ultimately affect the observed brightness temperature from the snow surface.
To analyze the radiation characteristics of snow under different conditions, the particle size and snow density were set to different values in a single layer of snow simulation. Following Garrity [
45] and Carsey [
6], the snow density on FYI was set to 200, 250, 300, and 350 kg/m
3; for MYI, it was 250, 300, 350, and 400 kg/m
3. Based on Garrity [
45] and Castro-Morales [
52], we set the range of snow depths to 5–70 cm at 5 cm intervals. The emissivity of different channels was taken as the average value [
6] on FYI and MYI. As for the downward radiation from the sky, previous studies have shown that, in the Arctic region, the annual atmospheric downward radiation in the microwave band was mostly below 30 K, and the reflection can be ignored [
7,
53,
54]. To ensure the accuracy of the TB simulations, the TB of snow observed under different atmospheric conditions was considered. Based on Tonboe [
55] and Waters [
56], this study simulated the TBs with downward radiation in the absence of water vapor and with a vertical water vapor content of 20 kg/m
2, separately.
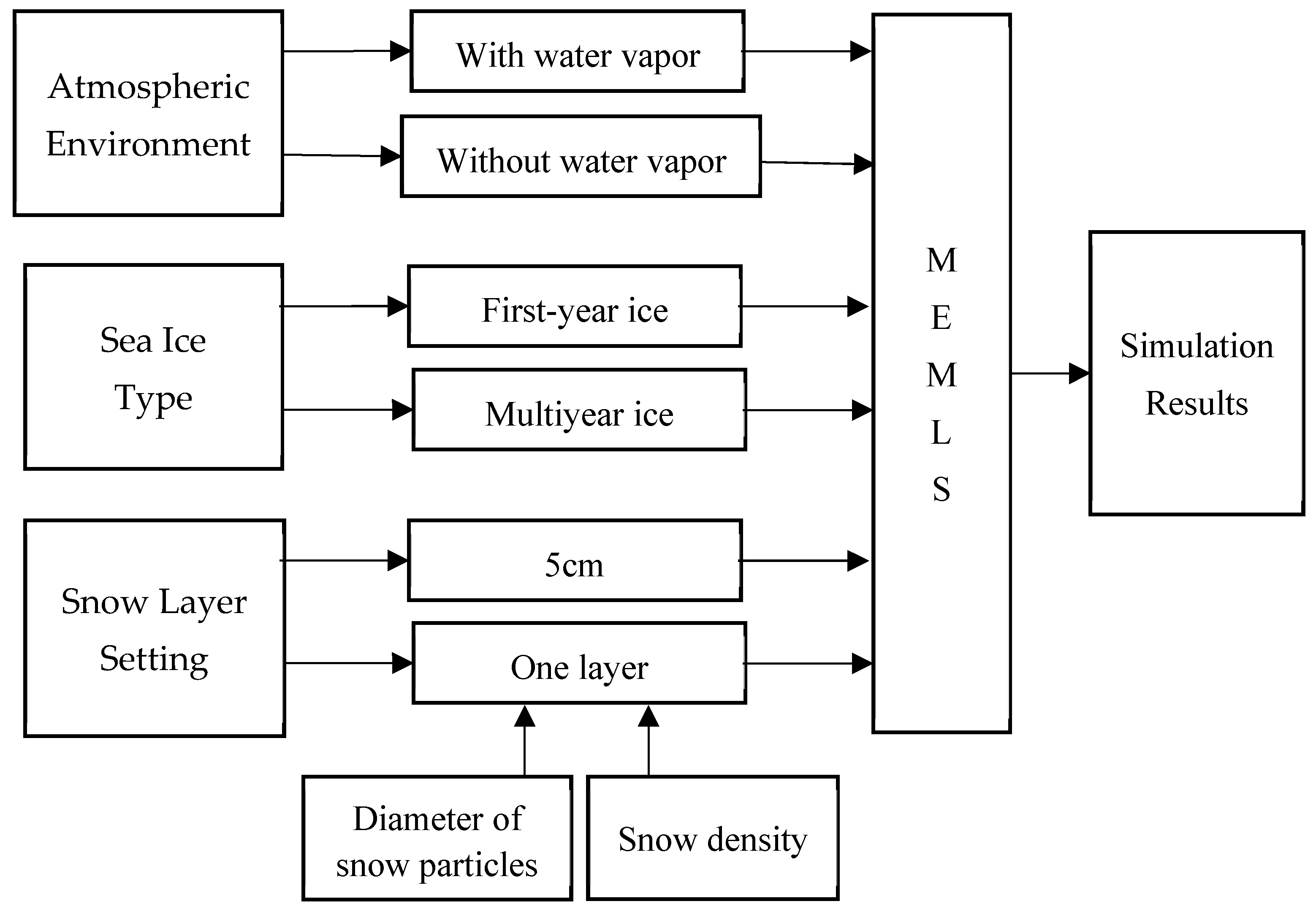
We also considered two types of snow layers, snow with only one layer and snow layered every 5 cm. In the former case, the density and diameter of particles were varied, while for the latter we used the same values referring to Tonboe et al. [
57], because the in situ snow density profile data on Arctic sea ice is scarce, and there is not enough to support the simulation. The simulation process with different parameter settings is illustrated in
Figure 1.
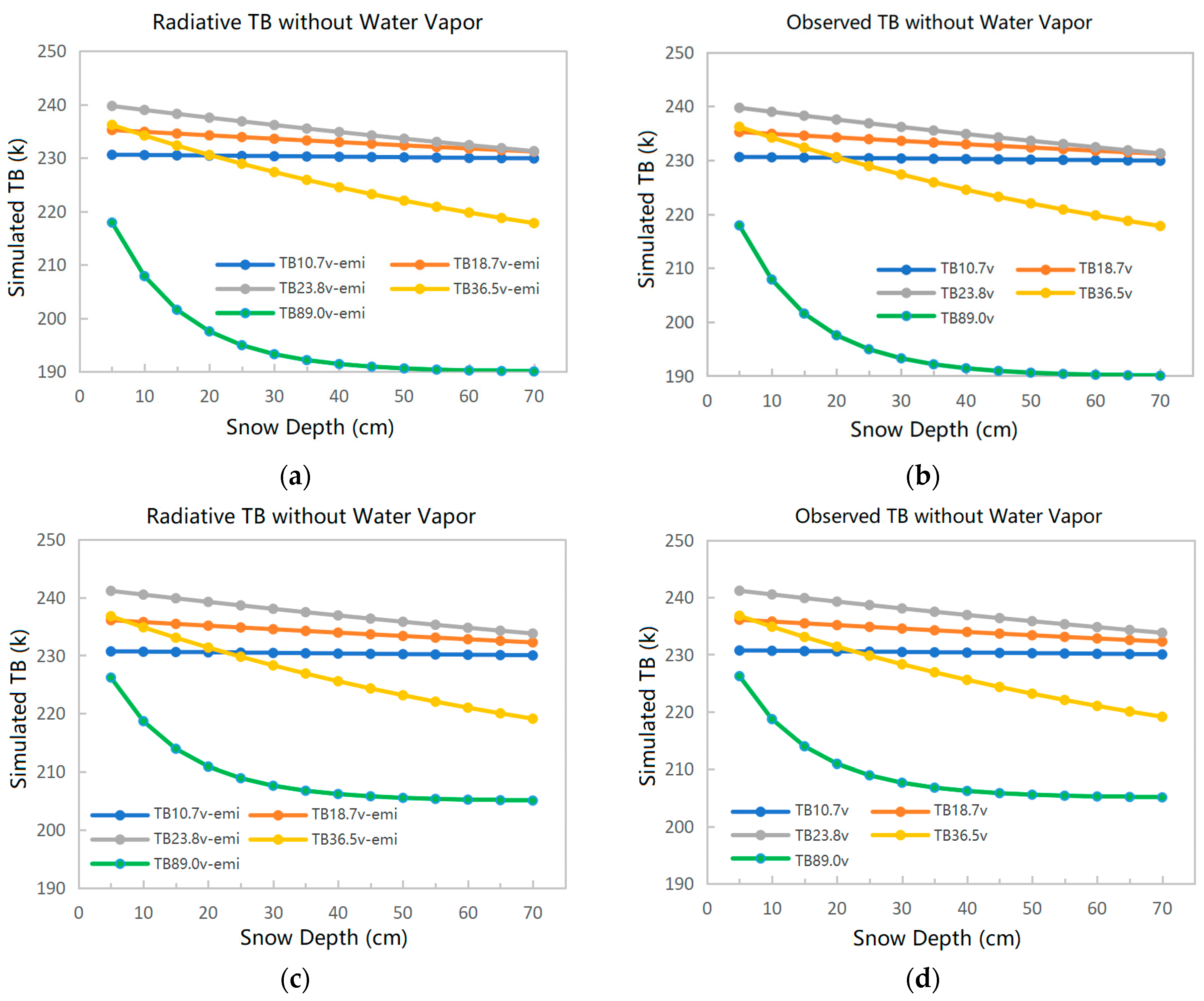
First, the influence of the atmosphere on the TBs was analyzed by simulating the TBs with and without water vapor in the atmosphere. The internal radiant TB from snow and the observed TBs (including the reflected downward radiation from the atmosphere) are shown in
Figure 2.
It was found that there is no difference between the radiant TB from snow and the observed TB, regardless of whether water vapor is present in the atmosphere. It can be concluded that the influence of downward atmospheric radiation can be discounted. Comparing the TBs in conditions with and without water vapor, it was found that, except for the channels at 23.8 GHz and 89 GHz, the TBs are very similar in both cases on the other channels. Thus, water vapor influences the TBs at 23.8 GHz and 89 GHz, but has no effect on the observed TBs from other channels. Therefore, when using MEMLS for sensitivity analysis later, we do not account for downward atmospheric radiation, and uniformly use the observed TB without water vapor.
We then conducted the simulation for single-layer snow. In this condition, we set the snow density to 300 kg/m
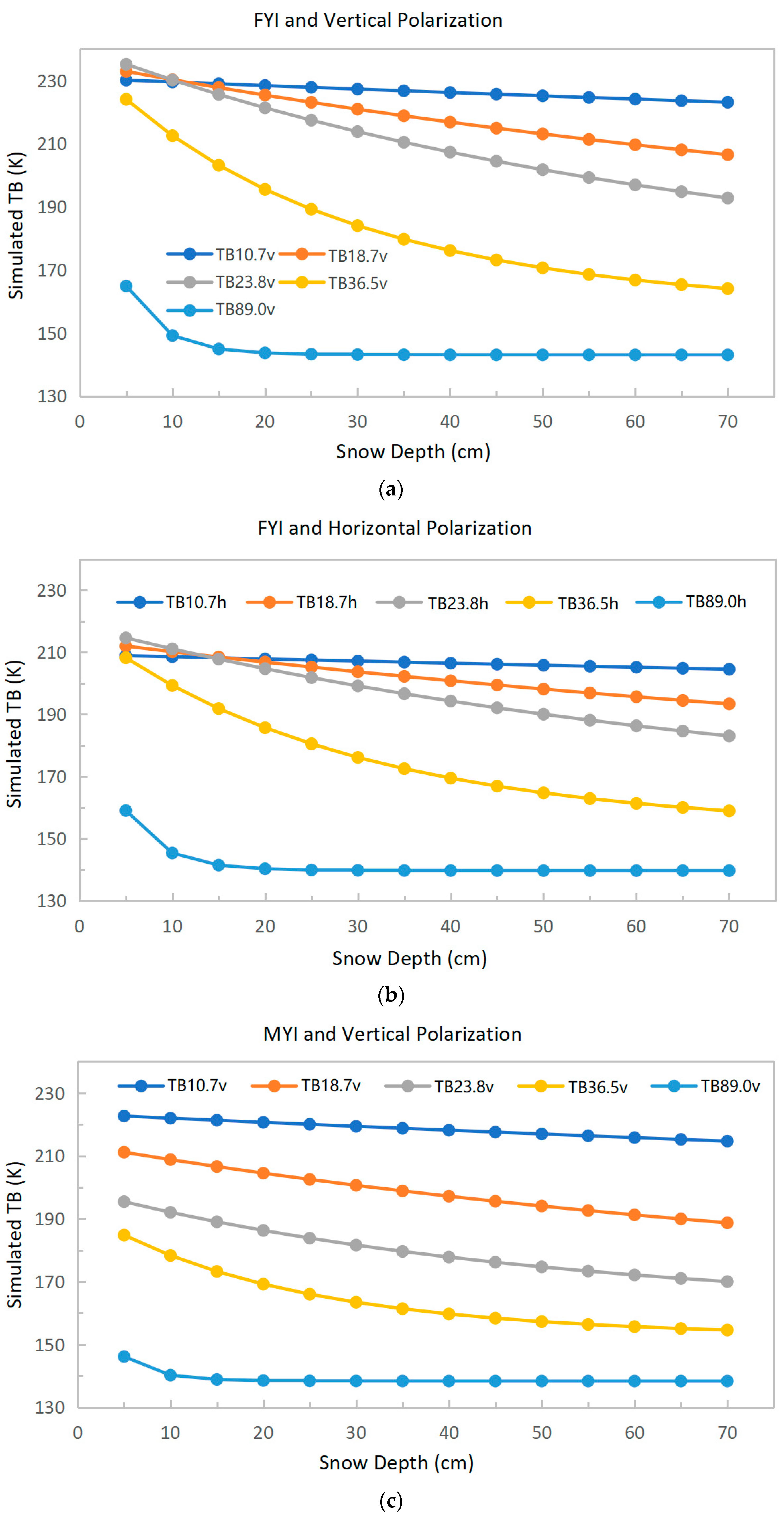
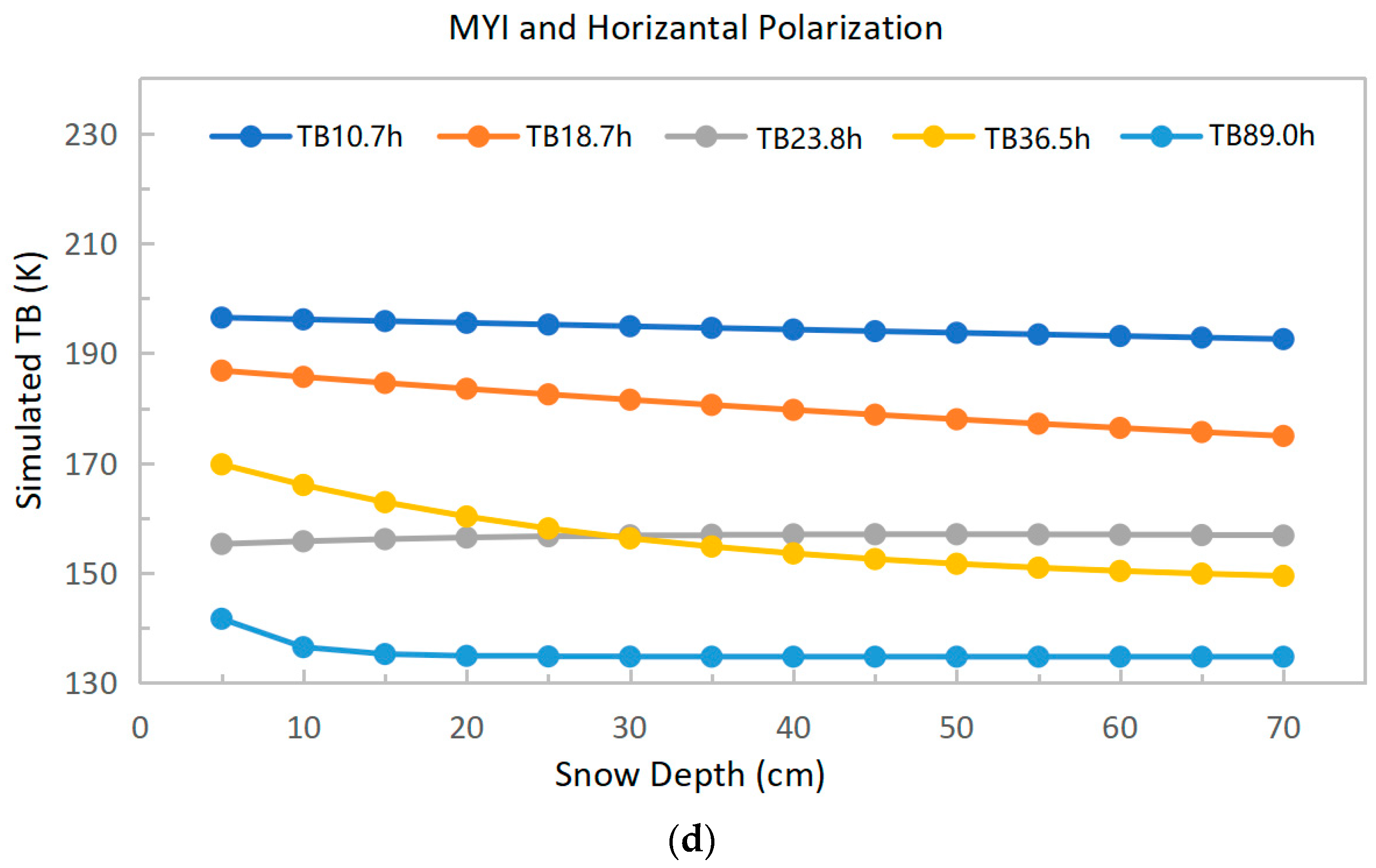
3 and the particle diameter to 1.5 mm as an example. The simulation results are shown in
Figure 3.
It can be seen that the observed TBs from vertical channels on FYI decrease as the snow depth increases, and the higher the frequency is, the greater the variation of TBs is, except for 89 GHz. As the snow depth changes from 5 to 70 cm, TB(10.7 V), TB(18.7 V), and TB(36.5 V) decrease by 7 K, 26 K, and 60 K, respectively (TB denotes TB; V denotes vertical polarization); when the snow is thinner, the attenuation of TB(89 V) is obvious. As the snow depth increases, the attenuation tends to saturate, and the rate of TB change decreases significantly. The results from the horizontal channels are similar to the above. The main difference is that the rate of changes in TBs is lower than for vertical polarization. The simulations on MYI are also similar to those on FYI. As the snow depth changes from 5 to 70 cm, TB(10.7 V), TB(18.7 V), and TB(36.5 V) decrease by 8 K, 22 K, and 30 K, respectively.
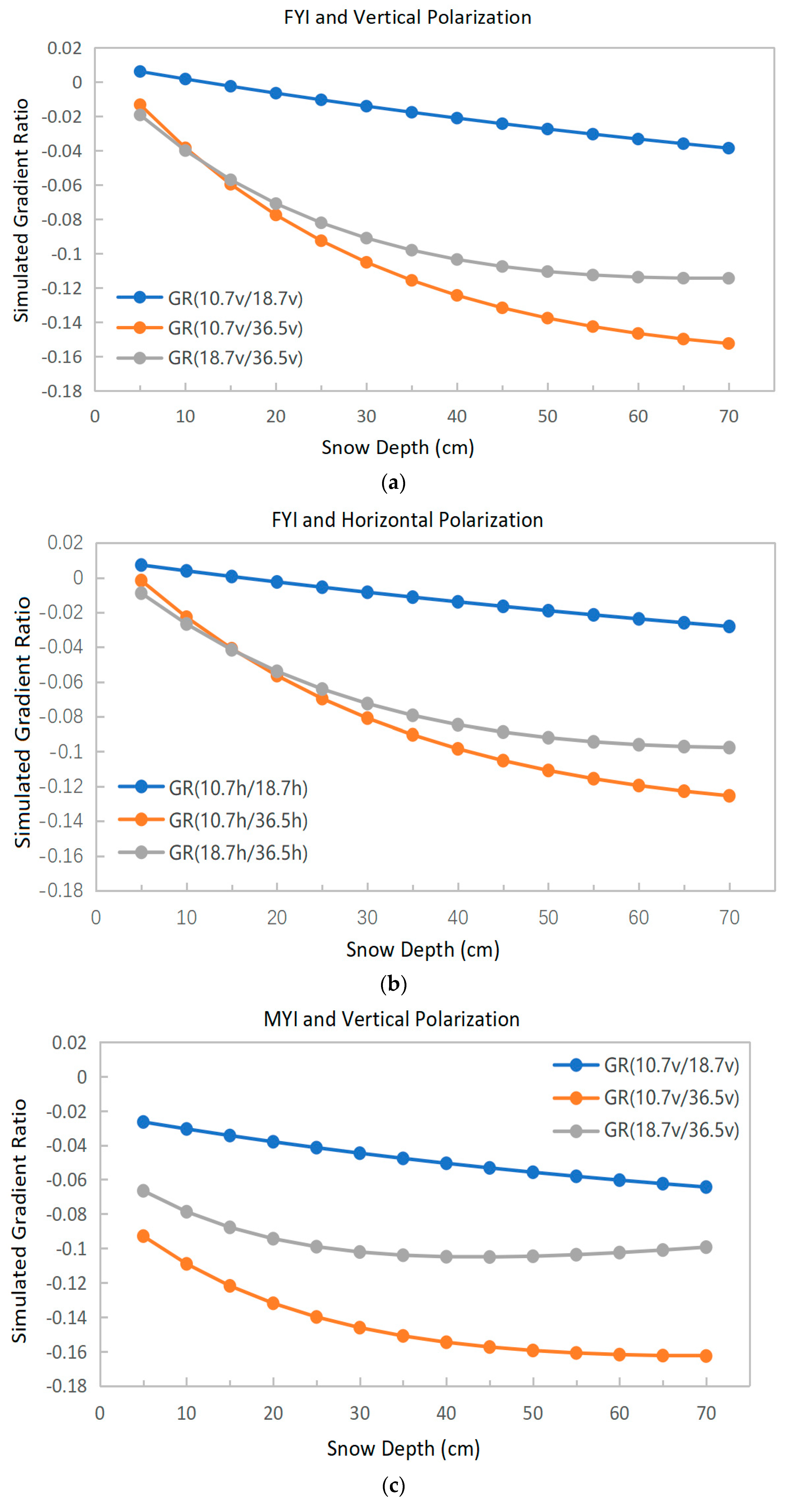
Third, we analyze the snow depth changes with the gradient ratios in different channels. The gradient ratio is defined as follows [
53]:
where GR is the gradient ratio, and T
B(
f,p) is the TB at frequency
f with polarization
p (horizontal or vertical). The changes in GRs with snow depth are shown in
Figure 4.
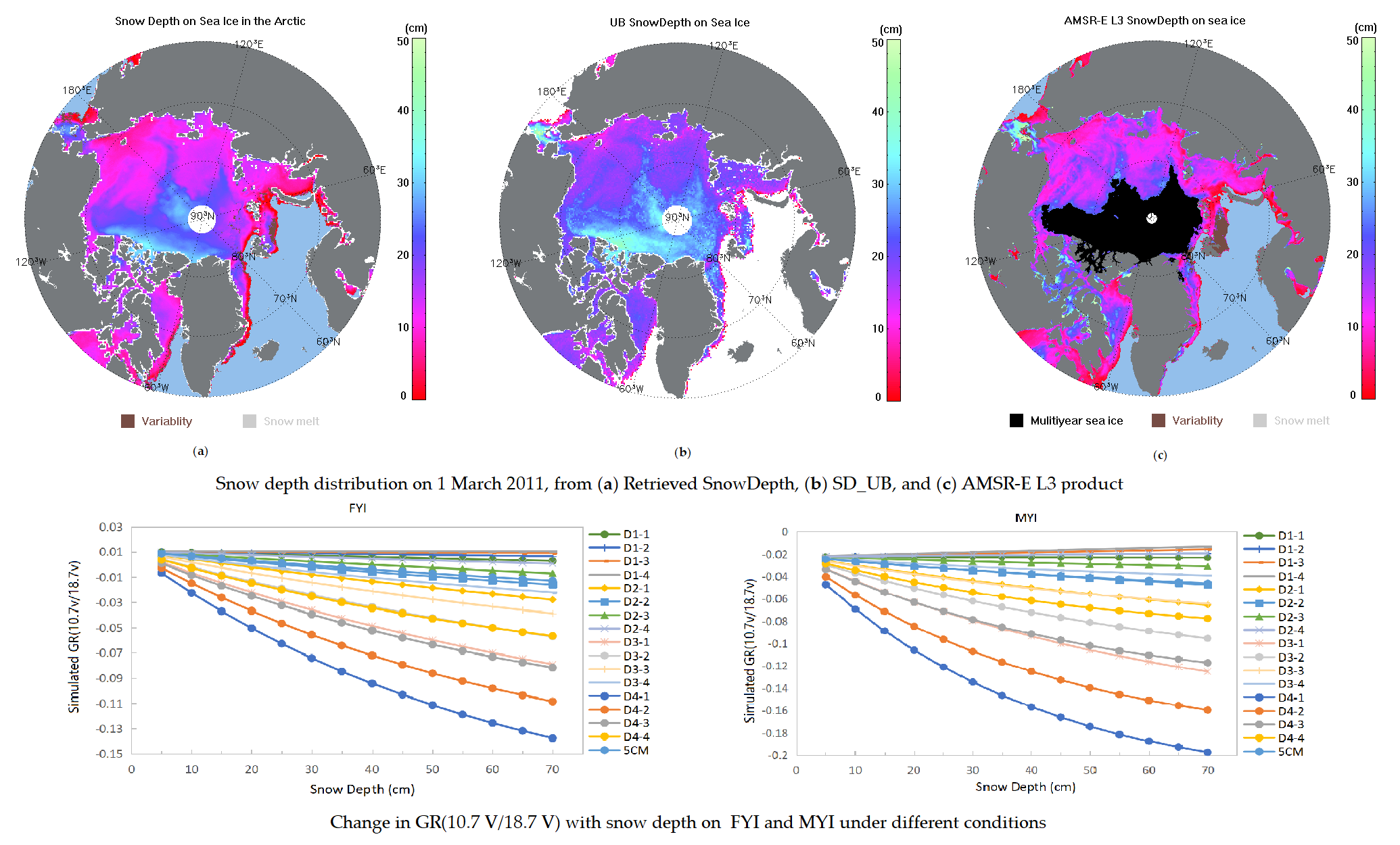
It can be seen from
Figure 4 that, for both FYI and MYI, the simulated GR(10.7 V/18.7 V) and GR(10.7 V/36.5 V) decrease as the snow depth increases. The difference is that the former has a linear relationship with respect to snow depth, whereas the latter exhibits a decreasing rate of change as the snow becomes deeper. GR(18.7 V/36.5 V) decreases as the snow depth increases in FYI and tends to saturate when the snow depth is above 50 cm. However, for MYI, it no longer drops once the snow depth is around 30 cm. This is consistent with the conclusion of Markus [
23] that the GR can be used to calculate the snow depth on FYI below 50 cm, but cannot be used to retrieve the snow depth on MYI. The results for horizontal polarization are similar to those for vertical polarization. The main difference is that the gradient ratio changes more slowly with the snow depth than in the case of vertical polarization.
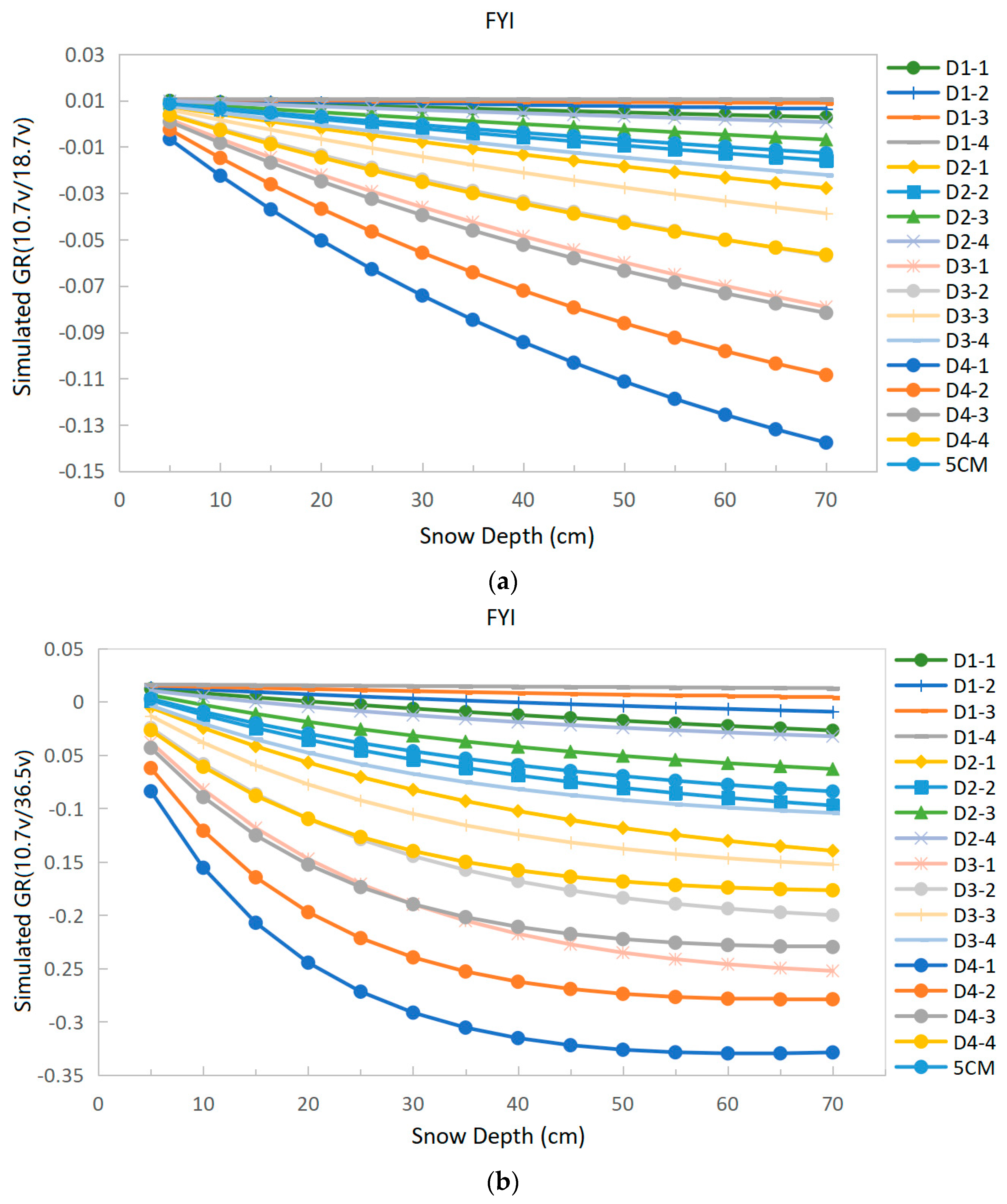
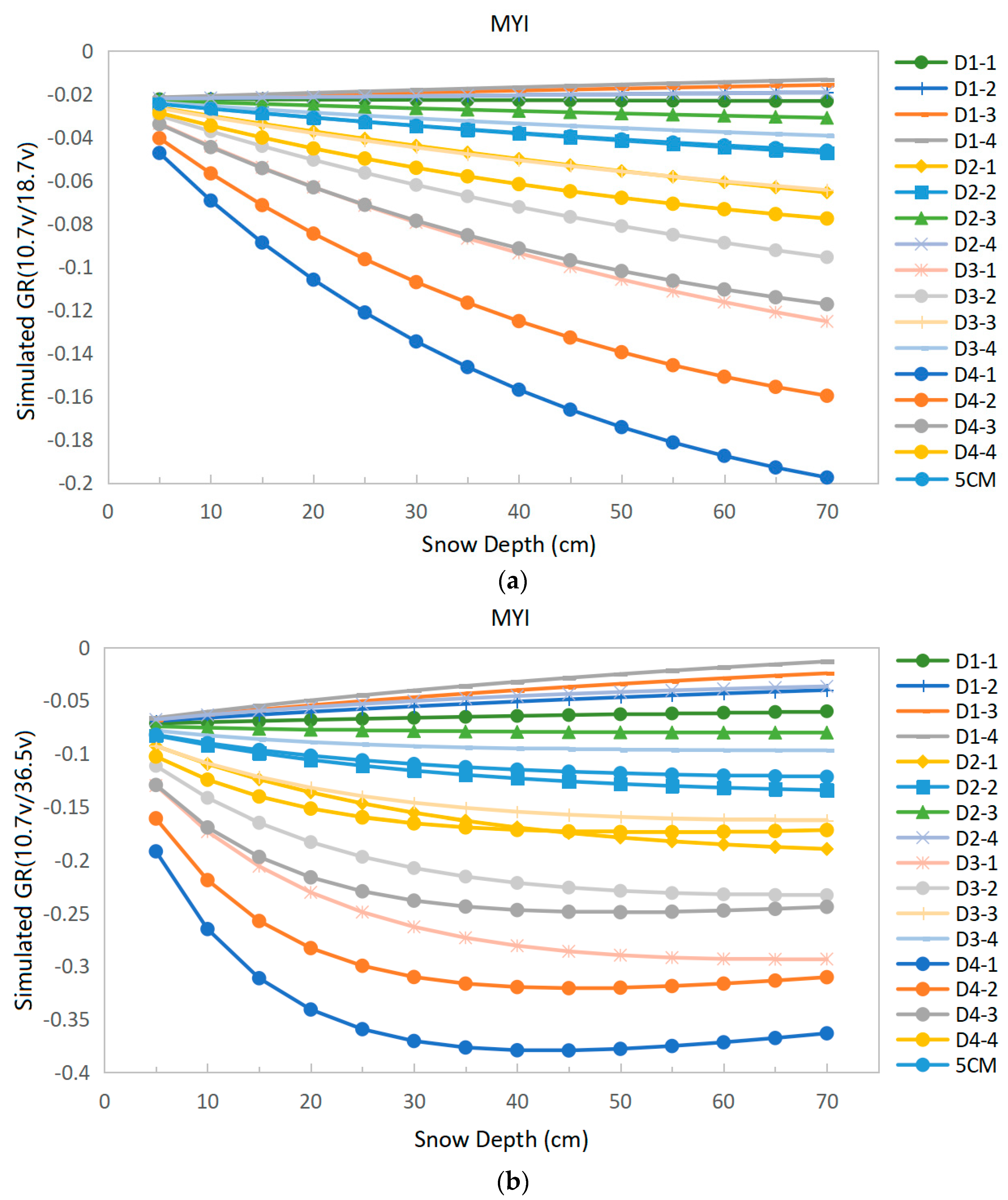
Based on the simulations above, we compared GR(10.7 V/18.7 V) and GR(10.7 V/36.5 V) under different densities, correlation lengths, and layering methods. The vertical polarized GRs on FYI are shown in
Figure 5.
“D1–1” to “D4–4” represent different snow conditions in the single layer simulations, as listed in
Table 2, whereas “5 cm” denotes the simulations with snow layered every 5 cm.
Figure 5 shows that on FYI, GR(10.7 V/18.7 V) decreases near-linearly with increasing snow depth in various environments, and decreases faster with increasing particle size. When the particle size is constant, a smaller density results in a faster decrease inGR. Meanwhile, GR(10.7 V/36.5 V) decreases linearly with the increase in snow depth for small particle size. When the snow depth is less than about 50 cm and the particle size increases, the ratio decreases as the snow depth increases, and then becomes saturated. This is mainly because, as the particle size of snow becomes larger, the scattering of microwave signals by snow gradually increases, which leads to faster changes in TBs with snow depth. Because the scattering of microwave signals is greater at high frequency than at low frequency, the signal attenuation becomes very fast as the particle size increases and becomes saturated at a certain snow depth, which will result in GRs that no longer decrease as the snow depth increases. In some extreme cases, the GR will even increase as snow depth increases when the TB change at high frequency is lower than that at low frequency.
Similar to the case of FYI, GR(10.7 V/18.7 V) decreases almost linearly with increasing snow depth, except in extreme cases. With increasing particle size, the GRs gradually increase. GR(10.7 V/36.5 V) also decreases with increasing snow depth when the snow depths are below 30 cm and then remains fairly constant. When the snow particle size is large, this gradient ratio increases with snow depth.
To further analyze the relationship between TBs (GRs) and snow depths, correlation coefficients between them are presented in
Table 3.
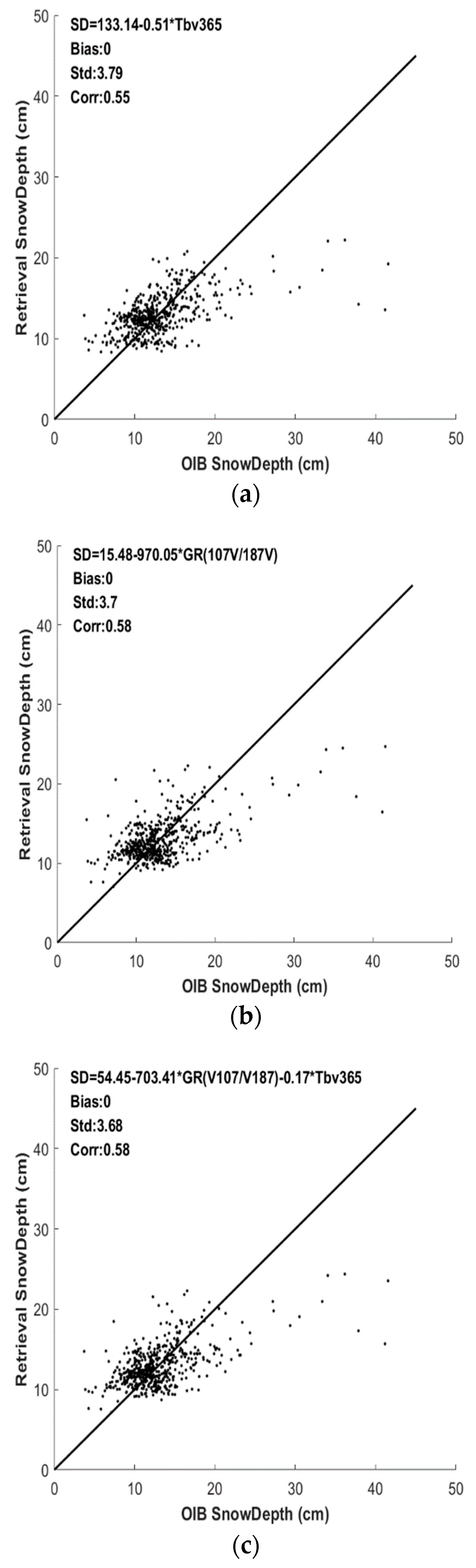
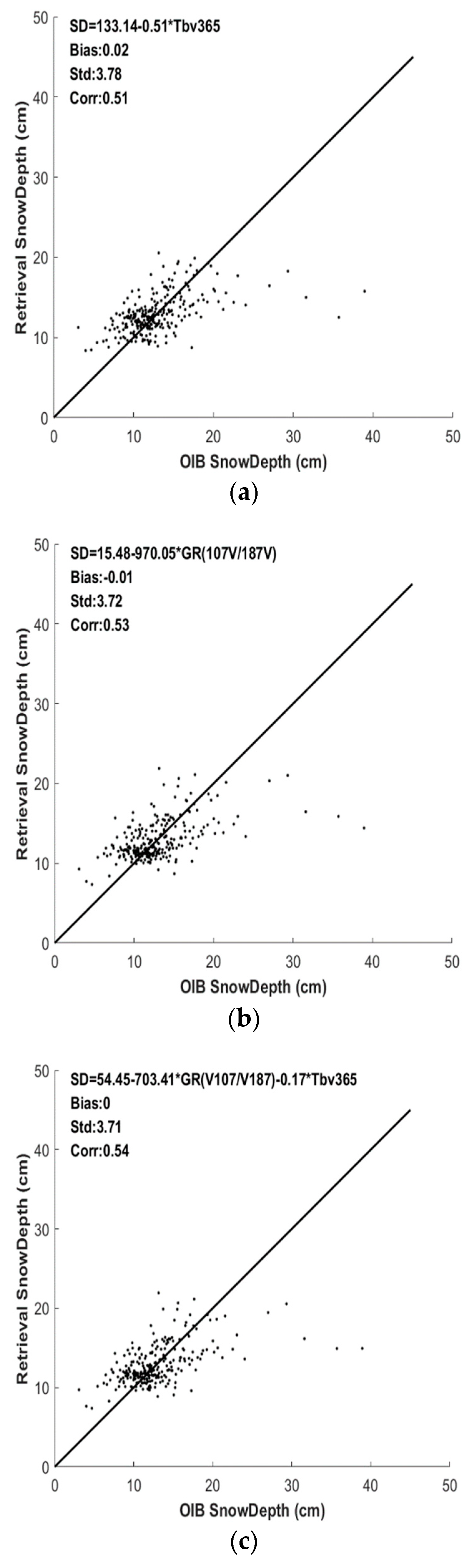
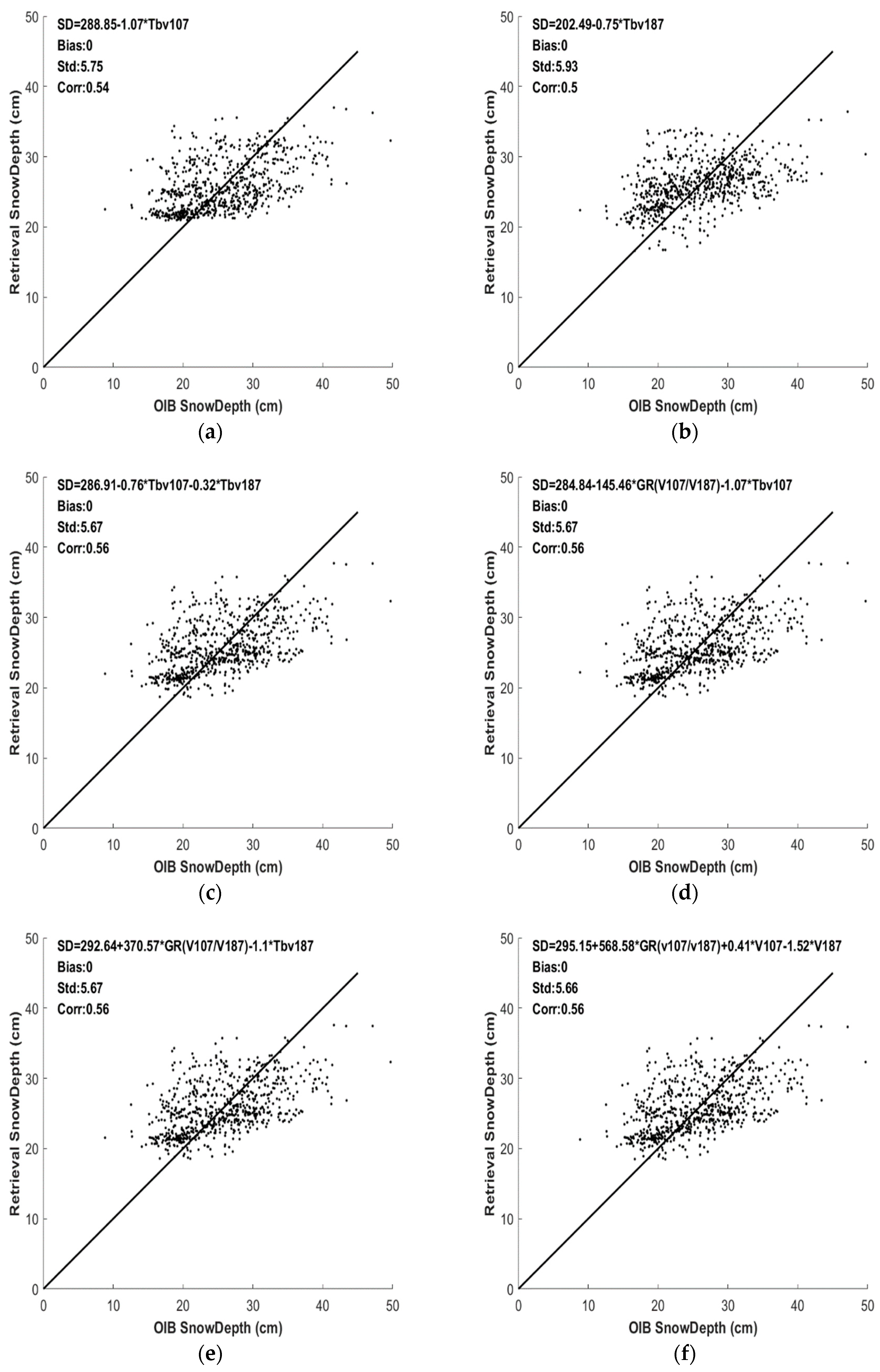
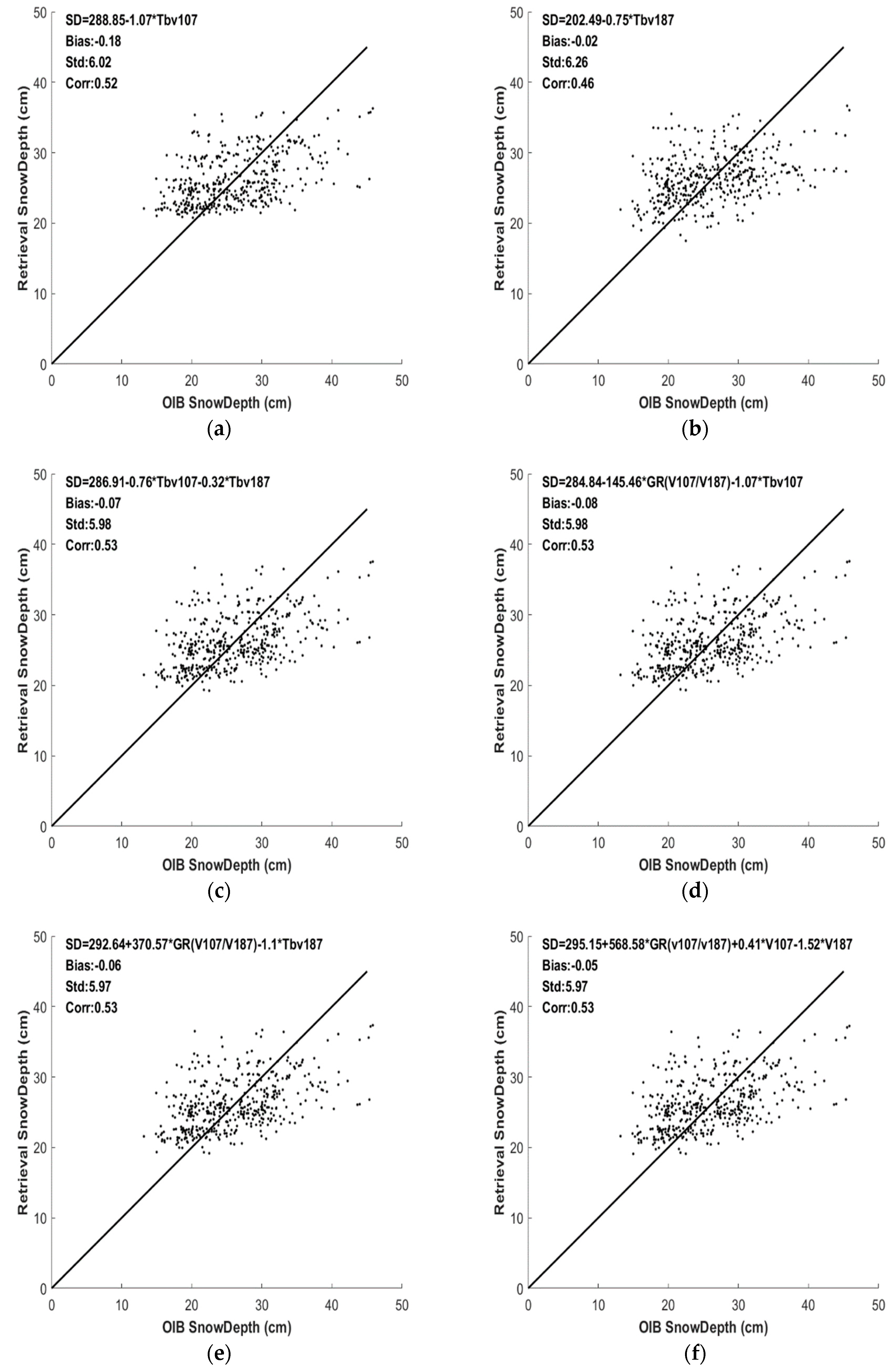
Based on the sensitivity and correlation analyses above, the GR(10.7 V/18.7 V) and TB(36.5 V) are the best parameters for snow depth retrieval on FYI, whereas TB(10.7 V), TB(18.7 V), and GR(10.7 V/18.7 V) are best for MYI.
5. Conclusions
Based on the TBs from the FY3B/MWRI, a study of snow depth retrieval in the Arctic was conducted for both first-year and multiyear ice. Starting from the physical process of microwave signal transmission in ice, snow, and the atmosphere, the influence of snow depth variations on surface observed TBs was analyzed, along with their correlation based on radiative transfer theory. This sensitivity analysis was based on the physical simulation of the microwave transmission process, which is more reasonable and credible. On this basis, the optimal channel combinations and forms for snow depth retrieval were proposed on Arctic sea ice using TBs from the FY3B/MWRI. An algorithm for snow depth retrieval was then developed using TBs from the FY3B/MWRI and snow depths from OIB, on both FYI and MYI in the Arctic. Verification results indicated that the bias and Std of the algorithm developed in this study were 2.89 and 2.6 cm, respectively, on FYI, and 1.44 and 4.53 cm, respectively, on MYI. It can be concluded that the snow depths derived herein are effective and in good agreement with OIB data. The proposed algorithm was proven useful for the effective retrieval of snow depth on sea ice from FY3B/MWRI TBs in the Arctic. Importantly, this study provides the first algorithm of snow depths from MWRI that realizes the full coverage of the Arctic sea ice.
Of course, the algorithm still has some limitations. For example, due to the strong absorption of microwave radiation by liquid water, the microwave signal cannot penetrate wet snow. Therefore, the snow depth retrieval using microwave radiometers, including the algorithm in this study, can only calculate the dry snow. A multi sensor combination method to calculate wet snow depth may be taken into account in a future study. Moreover, we will call for more attention to the continuous collection of field snow depth data, including snow profiles for snow density and snow grain size, to further simulate the effect of snow depth on observed TBs in various snow profiles, together with deep snow data on FYI and MYI, e.g., from the MOSAiC (Multidisciplinary drifting Observatory for the Study of Arctic Climate), to ensure sufficient snow depth data in all numerical ranges. As analysis of the sensitivity of MWRI TBs to snow depths is decided by physical modeling, it does not depend on field datasets. With the increase of in situ snow depth data, the algorithm can be upgraded, but the channels and parameters will remain unchanged.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}