
Feature-Level Fusion of Polarized SAR and Optical Images Based on Random Forest and Conditional Random Fields





Abstract
1. Introduction
2. Materials
2.1. Study Site
2.2. Sampling Point Selection
3. Characteristic Data Acquisition
3.1. Polarization Feature Extraction
3.1.1. Freeman-Durden Decomposition
3.1.2. Polarization Signature Correlation Feature (PSCF)
3.2. Optical Image Feature Extraction
3.2.1. Spectral Information Extraction
3.2.2. Grey-Level Co-Occurrence Matrix (GLCM)
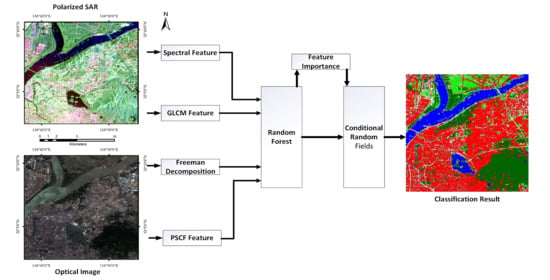
4. Random Forest-Importance_Conditional Random Forest (RF-Im_CRF) Model
4.1. Random Forest
4.2. Conditional Random Fields
4.3. RF-Im_CRF Model
4.3.1. Establishment of Potential Functions
4.3.2. Feature Importance
5. Experiment and Analysis
5.1. Multi-Source Data Comparative Classification Experiment
5.2. Comparison of RF-Im_CRF Model Experiment Results
5.2.1. Analysis of Classified Image Results
5.2.2. Classification Data Analysis
5.2.3. Analysis of Feature Importance
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Aswatha, S.M.; Mukherjee, J.; Biswas, P.K.; Aikat, S. Unsupervised classification of land cover using multi-modal data from mul-ti-spectral and hybrid-polarimetric SAR imageries. Int. J. Remote Sens. 2020, 41, 5277–5304. [Google Scholar] [CrossRef]
- Hall, D.K.; Riggs, G.A.; Salomonson, V.V. Development of methods for mapping global snow cover using moderate resolution imaging spectroradiometer data. Remote Sens. Environ. 1995, 54, 127–140. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, Q.; Li, A.; Liang, C.Z. Historical landscape dynamics of Inner Mongolia: Patterns, drivers, and impacts. Landsc. Ecol. 2015, 30, 1579–1598. [Google Scholar] [CrossRef]
- Useya, J.; Chen, S. Exploring the Potential of Mapping Cropping Patterns on Smallholder Scale Croplands Using Sentinel-1 SAR Data. Chin. Geogr. Sci. 2019, 29, 626–639. [Google Scholar] [CrossRef]
- Neetu; Ray, S.S. Evaluation of different approaches to the fusion of Sentinel -1 SAR data and Resourcesat 2 LISS III optical data for use in crop classification. Remote Sens. Lett. 2020, 11, 1157–1166. [Google Scholar] [CrossRef]
- Malthus, T.J.; Madeira, A.C. High resolution spectroradiometry: Spectral reflectance of field bean leaves infected by Botrytis fabae. Remote Sens. Environ. 1993, 45, 107–116. [Google Scholar] [CrossRef]
- Sun, J.; Mao, S. River detection algorithm in SAR images based on edge extraction and ridge tracing techniques. Int. J. Remote Sens. 2011, 32, 3485–3494. [Google Scholar] [CrossRef]
- Pohl, C.; Genderen, J.L. Review Article Multisensor Image Fusion in Remote Sensing: Concepts, Methods and Applications. Int. J. Remote Sens. 1998, 19, 823–854. [Google Scholar] [CrossRef]
- Su, R.; Tang, Y. Feature Fusion and Classification of Optical-PolSAR Images. Geomat. Spat. Inf. Technol. 2019, 42, 51–55. [Google Scholar]
- Zhang, L.; Zou, B.; Zhang, J.; Zhang, Y. Classification of Polarimetric SAR Image Based on Support Vector Machine Using Multiple-Component Scattering Model and Texture Features. EURASIP J. Adv. Signal Process. 2010, 2010, 960831. [Google Scholar] [CrossRef]
- Ojala, T.; Pietiainen, M.; Harwood, D. A Comparative Study of Texture Measures with Classification Based on Feature Distributions. Pattern Recognit. 1996, 29, 51–59. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. In IEEE Transactions on Systems, Man, and Cybernetics; IEEE: New York, NY, USA, 1973; Volume SMC-3, pp. 610–621. [Google Scholar] [CrossRef]
- Dong, J. Statistical Analysis of Polarization SAR Image Features and Research on Classification Algorithm; Wuhan University: Wuhan, China, 2018. [Google Scholar]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Sato, A.; Yamaguchi, Y.; Singh, G.; Park, S.E. Four-Component Scattering Power Decomposition with Extended Volume Scattering Model. IEEE Geosci. Remote Sens. Lett. 2012, 9, 166–170. [Google Scholar] [CrossRef]
- Attarchi, S. Extracting impervious surfaces from full polarimetric SAR images in different urban areas. Int. J. Remote Sens. 2020, 41, 4644–4663. [Google Scholar] [CrossRef]
- Phartiyal, G.S.; Kumar, K.; Singh, D. An improved land cover classification using polarization signatures for PALSAR 2 data. Adv. Space Res. 2020, 65, 2622–2635. [Google Scholar] [CrossRef]
- Breiman, L. Manual on Setting Up, Using, and Understanding Random Forests V3.1 [EB/OL]; Statistics Department University of California Berkley: Berkley, CA, USA, 2002. [Google Scholar]
- Du, P.; Samat, A.; Waske, B.; Liu, S.; Li, Z. Random Forest and Rotation Forest for fully polarized SAR image classification using po-larimetric and spatial features. ISPRS J. Photogramm. Remote Sens. 2015, 105, 38–53. [Google Scholar] [CrossRef]
- Sutton, C.; Mccallum, A. An Introduction to Conditional Random fields. Found. Trends Mach. Learn. 2010, 4, 267–373. [Google Scholar] [CrossRef]
- Zhong, Y.; Jia, T.; Ji, Z.; Wang, X.; Jin, S. Spatial-Spectral-Emissivity Land-Cover Classification Fusing Visible and Thermal Infrared Hyperspectral Imagery. Remote Sens. 2017, 9, 910. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, X.; Zhu, X.; Dong, Z.; Guo, W. Estimation of biomass in wheat using random forest regression algorithm and remote sensing data. Crop J. 2016, 4, 212–219. [Google Scholar] [CrossRef]
- Harold, M. The Kennaugh matrix. In Remote Sensing with Polarimetric Radar, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2007; pp. 295–298. [Google Scholar]
- Lee, J.S.; Grunes, M.R.; Boerner, W.M. Polarimetric property preservation in SAR speckle filtering. In Proceedings of SPIE 3120, Wideband Interferometric Sensing and Imaging Polarimetry; Mott, H., Ed.; SPIE: San Diego, CA, USA, 1997; pp. 1–7. [Google Scholar]
- Lee, J.S.; Pottier, E. Electromagnetic vector scattering operators. In Polarimetric Radar Imaging: From Basics to Applications, 1st ed.; Thompson, B.J., Ed.; CRC Press: New York, NY, USA, 2009; pp. 92–98. [Google Scholar]
- Menze, B.; Kelm, B.; Masuch, R.; Himmelreich, U.; Bachert, P.; Petrich, W.; Hamprecht, F. A comparison of random forest and its Gini importance with standard chemometric methods for the feature selection and classification of spectral data. BMC Bioinform. 2009, 10, 213. [Google Scholar] [CrossRef] [PubMed]
- Altmann, A.; Toloşi, L.; Sander, O.; Lengauer, T. Permutation importance: A corrected feature importance measure. Bioinformatics (Oxf. Engl.) 2010, 26, 1340–1347. [Google Scholar] [CrossRef] [PubMed]
- Strobl, C.; Boulesteix, A.L.; Kneib, T.; Augustin, T.; Zeileis, A. Conditional variable importance for random forests. BMC Bioinform. 2008, 9, 307. [Google Scholar] [CrossRef] [PubMed]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label Category | Train Number | Test Number |
|---|---|---|
| Water | 100 | 150 |
| High vegetation | 100 | 150 |
| Building | 100 | 150 |
| Low vegetation | 100 | 150 |
| Road | 100 | 150 |
| Total | 500 | 750 |
| SVM | RF | RF-CRF | RF-Im_CRF | |
|---|---|---|---|---|
| OA | 79% | 88.0% | 91.6% | 94.0% |
| 95% confidence interval | [85.88%,90.4%] | [90.22%,93.02%] | [93.52%,94.54%] | |
| Kappa | 0.74 | 0.85 | 0.89 | 0.91 |
| 95% confidence interval | [0.834,0.866] | [0.879,0.905] | [0.902,0.918] |
| Model | Water | High | Building | Low | Road | |
|---|---|---|---|---|---|---|
| Precision (%) | 87 | 85 | 72 | 79 | 74 | |
| Recall (%) | 77 | 88 | 84 | 84 | 63 | |
| F1-score (%) | 82 | 86 | 78 | 81 | 70 | |
| RF | Precision (%) | 98 | 92 | 79 | 85 | 78 |
| Recall (%) | 95 | 93 | 91 | 81 | 72 | |
| F1-score (%) | 96 | 92 | 85 | 83 | 75 | |
| RF-CRF | Precision (%) | 99 | 96 | 80 | 90 | 82 |
| Recall (%) | 95 | 95 | 93 | 88 | 75 | |
| F1-score (%) | 97 | 95 | 86 | 89 | 78 | |
| RF-Im_CRF | Precision (%) | 100 | 97 | 84 | 93 | 88 |
| Recall (%) | 95 | 96 | 97 | 89 | 84 | |
| F1-score (%) | 97 | 96 | 90 | 91 | 86 |
| Feature | Freeman | Spectral | GLCM | PSCF |
|---|---|---|---|---|
| (%) | 33.78 | 30.03 | 13.44 | 22.72 |
| Class | Pd | Ps | Pv | R | G | B | G1 | G2 | G3 | P1 | P2 | P3 | P4 | P5 | P6 | P7 | P8 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
(%) | 7.35 | 5.91 | 20.53 | 8.94 | 9.15 | 11.96 | 3.11 | 2.84 | 7.49 | 3.93 | 2.93 | 2.14 | 2.01 | 3.95 | 2.30 | 2.74 | 2.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, Y.; Yan, B.; Liu, Y.; Leung, H.; Peng, X. Feature-Level Fusion of Polarized SAR and Optical Images Based on Random Forest and Conditional Random Fields. Remote Sens. 2021, 13, 1323. https://doi.org/10.3390/rs13071323
Kong Y, Yan B, Liu Y, Leung H, Peng X. Feature-Level Fusion of Polarized SAR and Optical Images Based on Random Forest and Conditional Random Fields. Remote Sensing. 2021; 13(7):1323. https://doi.org/10.3390/rs13071323
Chicago/Turabian StyleKong, Yingying, Biyuan Yan, Yanjuan Liu, Henry Leung, and Xiangyang Peng. 2021. "Feature-Level Fusion of Polarized SAR and Optical Images Based on Random Forest and Conditional Random Fields" Remote Sensing 13, no. 7: 1323. https://doi.org/10.3390/rs13071323
APA StyleKong, Y., Yan, B., Liu, Y., Leung, H., & Peng, X. (2021). Feature-Level Fusion of Polarized SAR and Optical Images Based on Random Forest and Conditional Random Fields. Remote Sensing, 13(7), 1323. https://doi.org/10.3390/rs13071323