
Earthquake Damage Region Detection by Multitemporal Coherence Map Analysis of Radar and Multispectral Imagery

 ,
, 
 ,
,  and
and
Abstract
1. Introduction
2. Study Area and Datasets
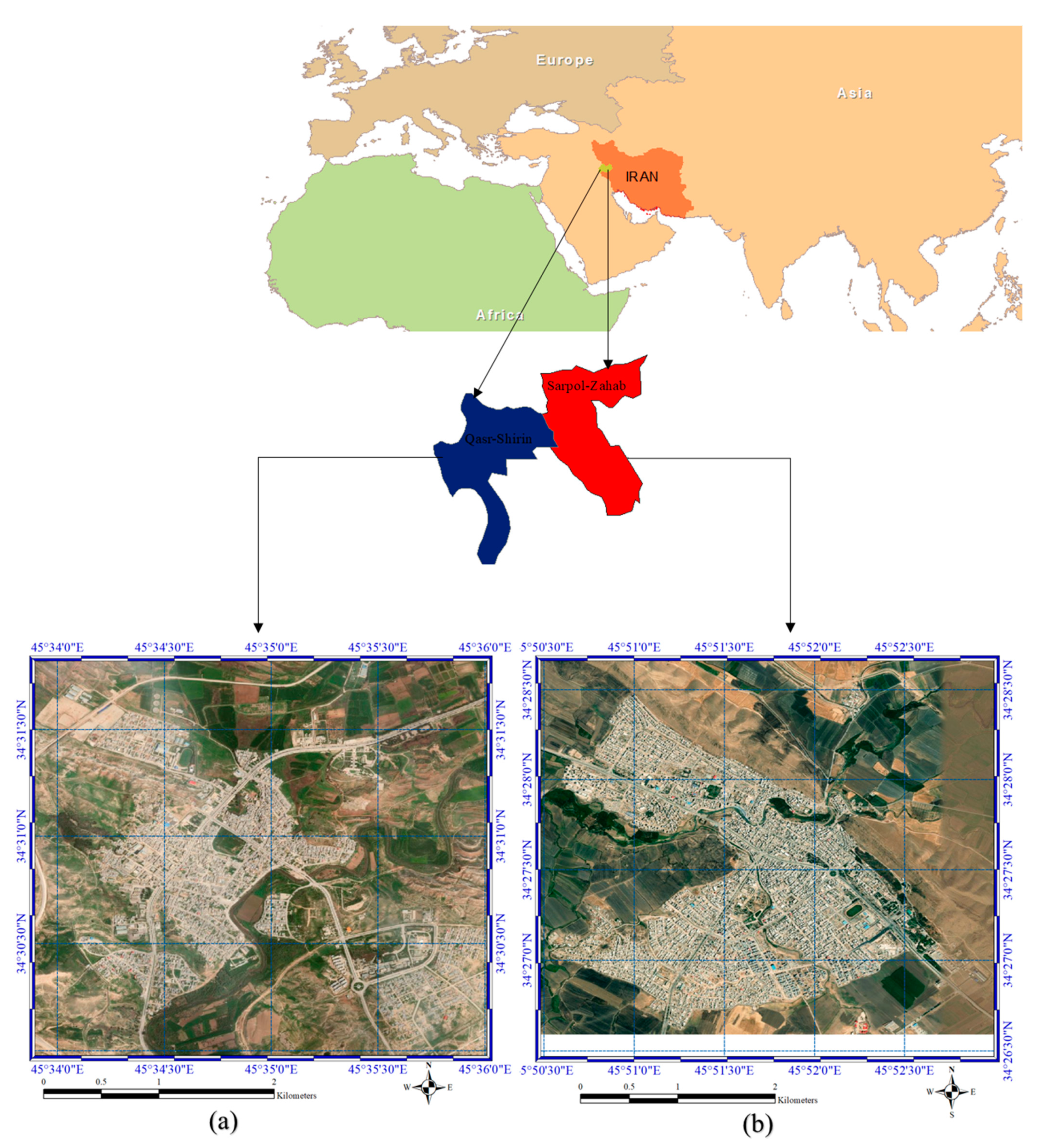
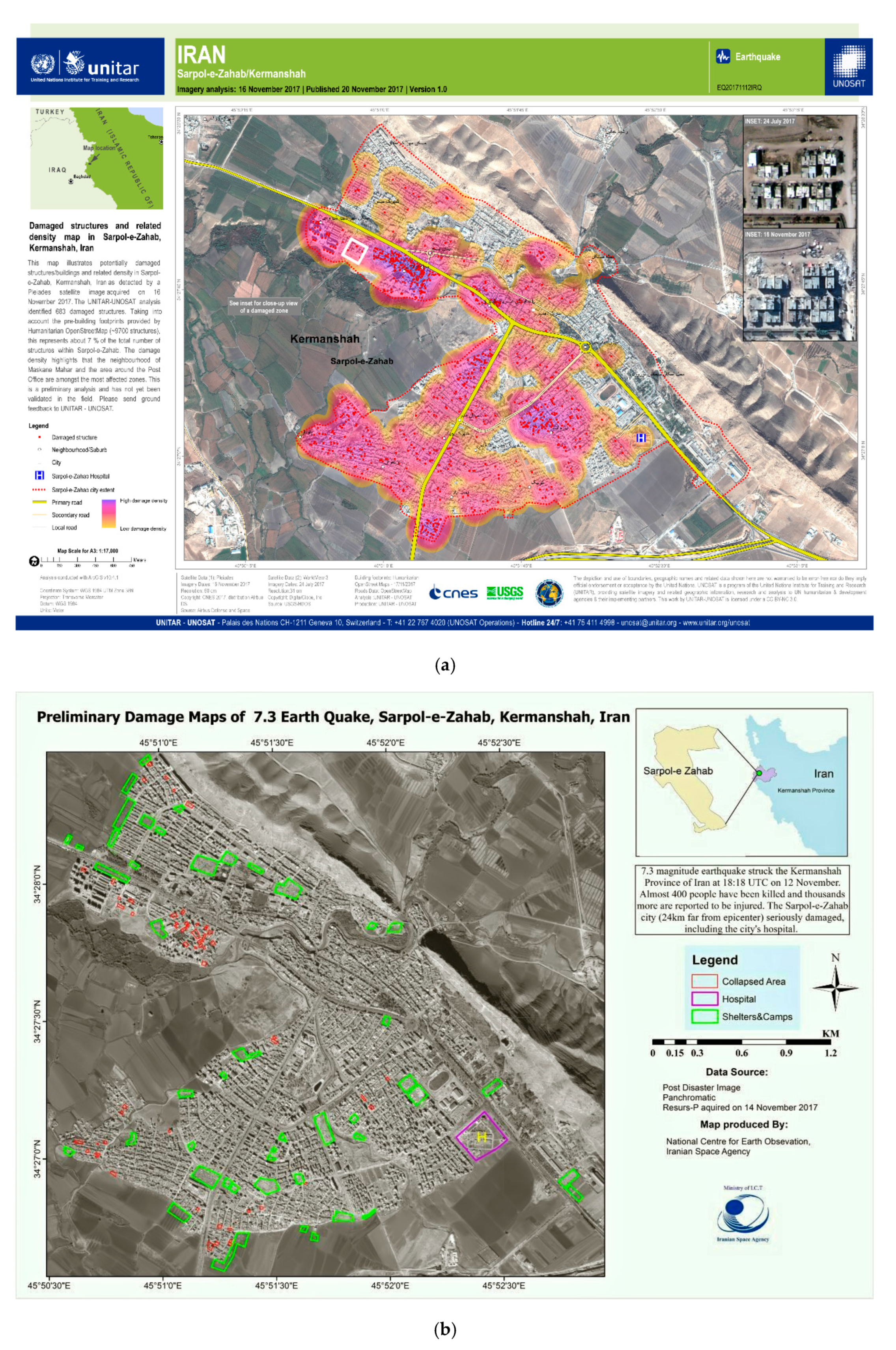
2.1. Case Study
2.2. Reference Data for the Damaged Area and Accuracy Assessment
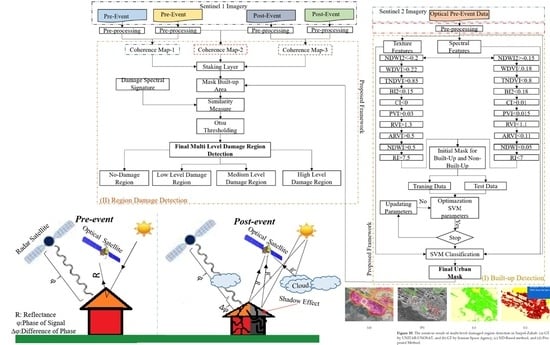
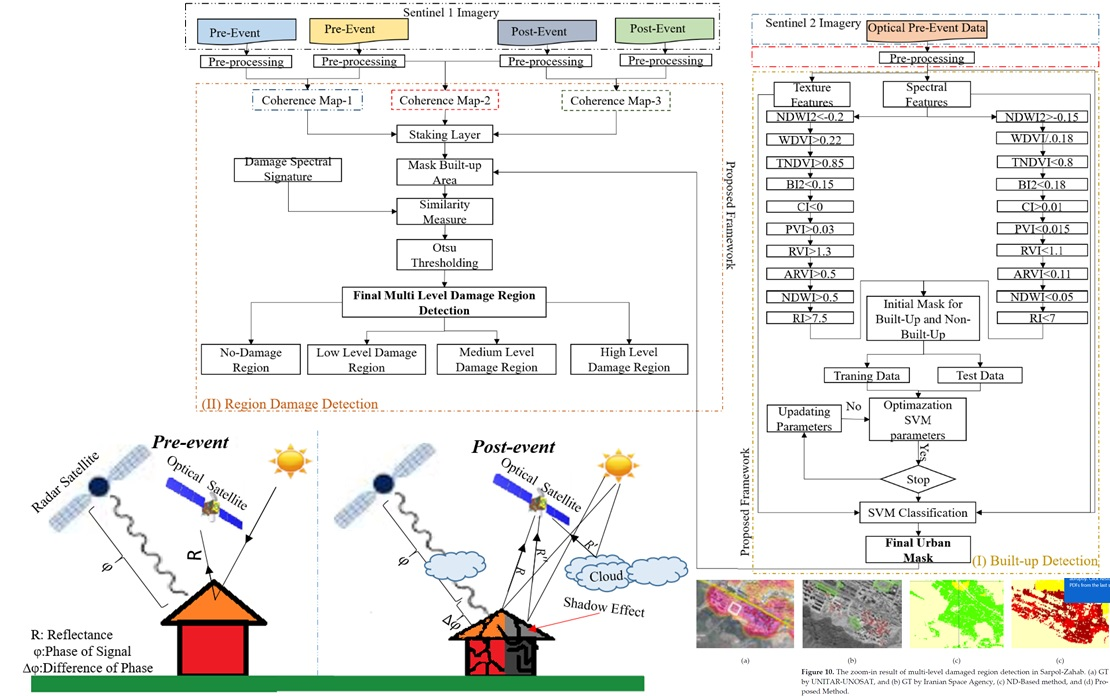
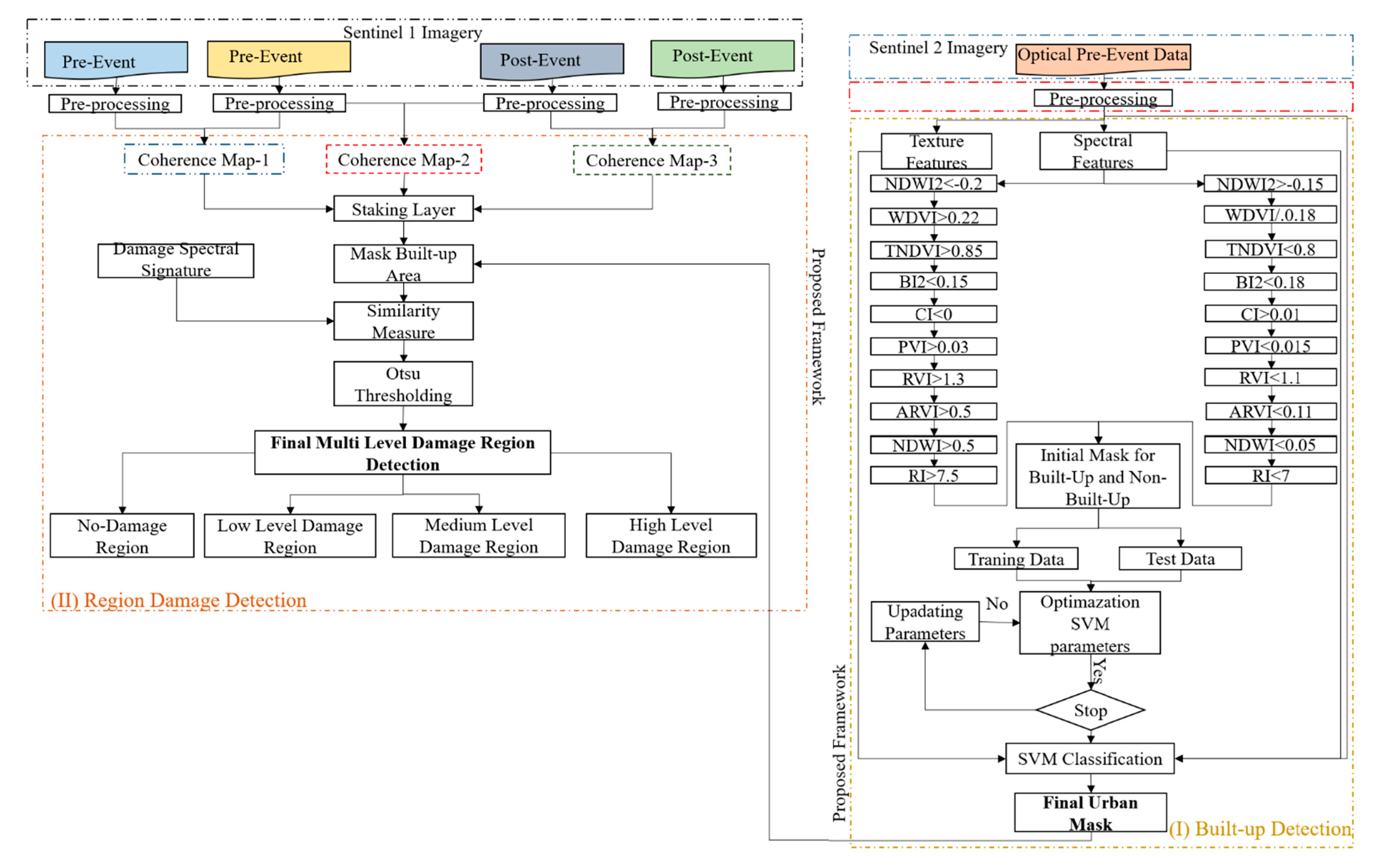
3. Methodology
3.1. Preprocessing
3.2. Phase 1: Built-Up Area Detection
3.2.1. Spectral/Spatial Feature Extraction
3.2.2. Pseudo Sample Generation and Classification
3.2.3. SVM Classifier
3.3. Phase 2: Damaged Region Mapping
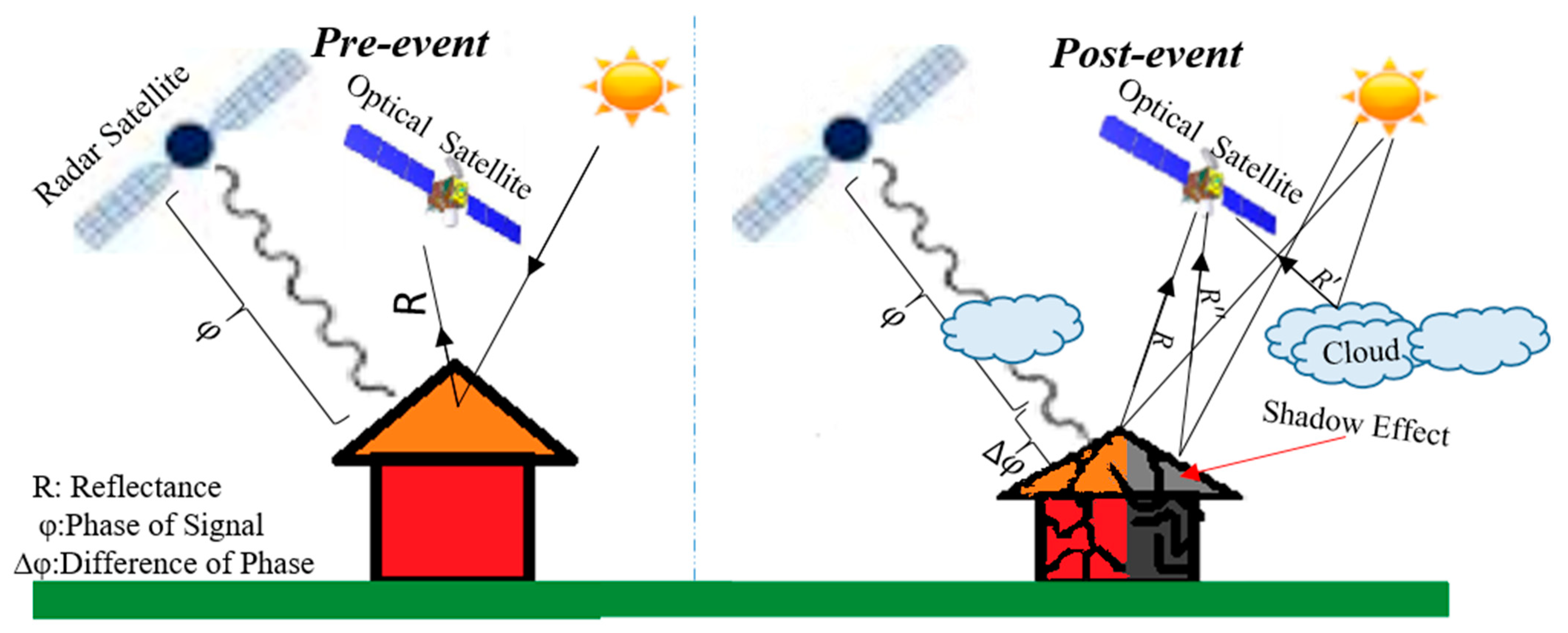
3.3.1. Coherence Map
3.3.2. SAM Algorithm
3.3.3. Otsu Algorithm
4. Experiment and Discussion
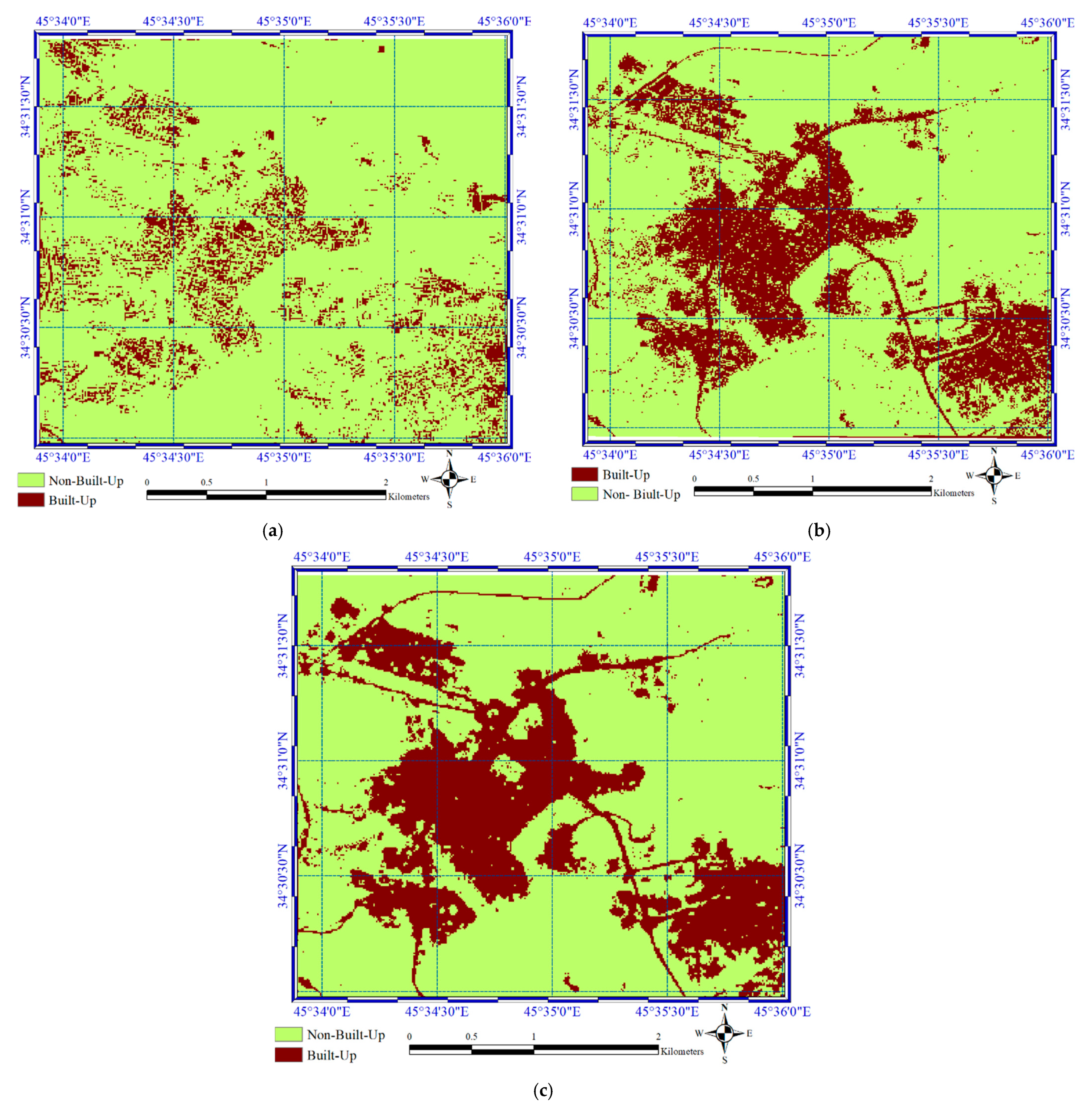
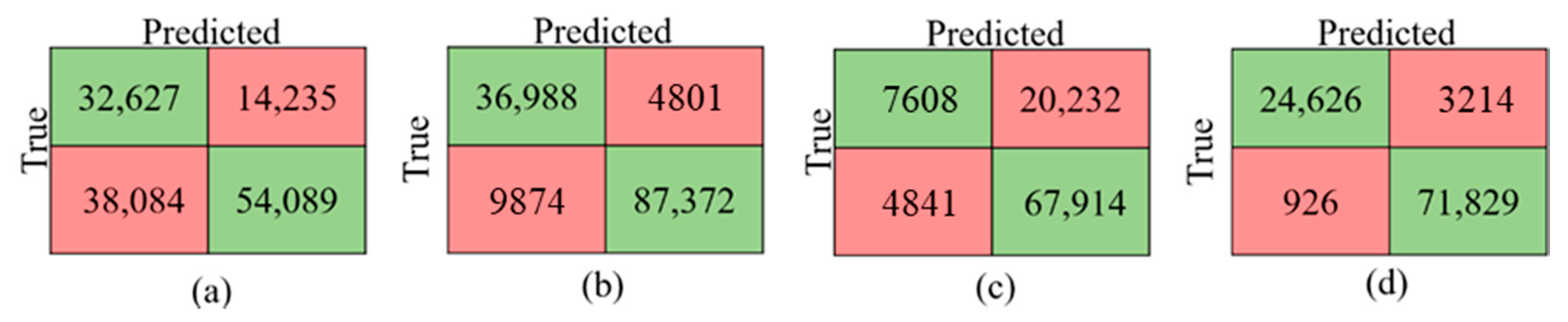
4.1. Built-Up Areas Extraction
4.2. Damaged Region Detection
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sahin, Y.G. A sensor selection model in simultaneous monitoring of multiple types of disaster. In Proceedings of the Geospatial Informatics IX, Baltimore, MD, USA, 15–16 April 2019; Volume 10992, p. 109920C. [Google Scholar]
- Garcia, J.; Istomin, E.; Slesareva, L.; Pena, J. Spatial data infrastructure for the management and risk assessment of natural disasters. In Proceedings of the Sixth International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2018), Paphos, Cyprus, 26–29 March 2018; p. 1077310. [Google Scholar]
- Rosser, J.F.; Leibovici, D.; Jackson, M.J. Rapid flood inundation mapping using social media, remote sensing and topographic data. Nat. Hazards 2017, 87, 103–120. [Google Scholar] [CrossRef]
- Aksha, S.K.; Resler, L.M.; Juran, L.; Carstensen, L.W., Jr. A geospatial analysis of multi-hazard risk in Dharan, Nepal. Geomat. Nat. Hazards Risk 2020, 11, 88–111. [Google Scholar] [CrossRef]
- Anniballe, R.; Noto, F.; Scalia, T.; Bignami, C.; Stramondo, S.; Chini, M.; Pierdicca, N. Earthquake damage mapping: An overall assessment of ground surveys and VHR image change detection after L’Aquila 2009 earthquake. Remote Sens. Environ. 2018, 210, 166–178. [Google Scholar] [CrossRef]
- Dong, L.; Shan, J. A comprehensive review of earthquake-induced building damage detection with remote sensing techniques. ISPRS J. Photogramm. Remote Sens. 2013, 84, 85–99. [Google Scholar] [CrossRef]
- Sharma, R.C.; Tateishi, R.; Hara, K.; Nguyen, H.T.; Gharechelou, S.; Nguyen, L.V. Earthquake Damage Visualization (EDV) Technique for the Rapid Detection of Earthquake-Induced Damages Using SAR Data. Sensors 2017, 17, 235. [Google Scholar] [CrossRef]
- Seydi, S.; Rastiveis, H. A deep learning framework for roads network damage assessment using post-earthquake lidar data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 955–961. [Google Scholar] [CrossRef]
- Yamazaki, F.; Yano, Y.; Matsuoka, M. Visual Damage Interpretation of Buildings in Bam City using QuickBird Images following the 2003 Bam, Iran, Earthquake. Earthq. Spectra 2005, 21, 329–336. [Google Scholar] [CrossRef]
- Natsuaki, R.; Nagai, H.; Tomii, N.; Tadono, T. Sensitivity and Limitation in Damage Detection for Individual Buildings Using InSAR Coherence—A Case Study in 2016 Kumamoto Earthquakes. Remote Sens. 2018, 10, 245. [Google Scholar] [CrossRef]
- Menderes, A.; Erener, A.; Sarp, G. Automatic Detection of Damaged Buildings after Earthquake Hazard by Using Remote Sensing and Information Technologies. Procedia Earth Planet. Sci. 2015, 15, 257–262. [Google Scholar] [CrossRef]
- Matsuoka, M.; Yamazaki, F. Use of Satellite SAR Intensity Imagery for Detecting Building Areas Damaged Due to Earthquakes. Earthq. Spectra 2004, 20, 975–994. [Google Scholar] [CrossRef]
- Miyajima, M.; Fallahi, A.; Ikemoto, T.; Samaei, M.; Karimzadeh, S.; Setiawan, H.; Talebi, F.; Karashi, J. Site Investigation of the Sarpole-Zahab Earthquake, Mw 7.3 in SW Iran of November 12, 2017. Available online: https://committees.jsce.or.jp/disaster/FS2018-E-0002 (accessed on 18 March 2021).
- Aimaiti, Y.; Liu, W.; Yamazaki, F.; Maruyama, Y. Earthquake-Induced Landslide Mapping for the 2018 Hokkaido Eastern Iburi Earthquake Using PALSAR-2 Data. Remote Sens. 2019, 11, 2351. [Google Scholar] [CrossRef]
- Seydi, S.T.; Akhoondzadeh, M.; Amani, M.; Mahdavi, S. Wildfire Damage Assessment over Australia Using Sentinel-2 Imagery and MODIS Land Cover Product within the Google Earth Engine Cloud Platform. Remote Sens. 2021, 13, 220. [Google Scholar] [CrossRef]
- Seydi, S.T.; Hasanlou, M.; Amani, M. A New End-to-End Multi-Dimensional CNN Framework for Land Cover/Land Use Change Detection in Multi-Source Remote Sensing Datasets. Remote Sens. 2020, 12, 2010. [Google Scholar] [CrossRef]
- Seydi, S.T.; Hasanlou, M. A new land-cover match-based change detection for hyperspectral imagery. Eur. J. Remote Sens. 2017, 50, 517–533. [Google Scholar] [CrossRef]
- Zheng, Z.; Pu, C.; Zhu, M.; Xia, J.; Zhang, X.; Liu, Y.; Li, J. Damaged road extracting with high-resolution aerial image of post-earthquake. In Proceedings of the International Conference on Intelligent Earth Observing and Applications 2015, Guilin, China, 23–24 October 2015; p. 980807. [Google Scholar]
- Zhao, L.; Yang, J.; Li, P.; Zhang, L.; Shi, L.; Lang, F. Damage assessment in urban areas using post-earthquake airborne PolSAR imagery. Int. J. Remote Sens. 2013, 34, 8952–8966. [Google Scholar] [CrossRef]
- Wang, J.; Qin, Q.; Zhao, J.; Ye, X.; Feng, X.; Qin, X.; Yang, X. Knowledge-Based Detection and Assessment of Damaged Roads Using Post-Disaster High-Resolution Remote Sensing Image. Remote Sens. 2015, 7, 4948–4967. [Google Scholar] [CrossRef]
- Vetrivel, A.; Gerke, M.; Kerle, N.; Vosselman, G. Identification of damage in buildings based on gaps in 3D point clouds from very high resolution oblique airborne images. ISPRS J. Photogramm. Remote Sens. 2015, 105, 61–78. [Google Scholar] [CrossRef]
- Wei, D.; Yang, W. Detecting damaged buildings using a texture feature contribution index from post-earthquake remote sensing images. Remote Sens. Lett. 2019, 11, 127–136. [Google Scholar] [CrossRef]
- Song, D.; Tan, X.; Wang, B.; Zhang, L.; Shan, X.; Cui, J. Integration of super-pixel segmentation and deep-learning methods for evaluating earthquake-damaged buildings using single-phase remote sensing imagery. Int. J. Remote Sens. 2019, 41, 1040–1066. [Google Scholar] [CrossRef]
- Park, S.-E.; Jung, Y.T. Detection of Earthquake-Induced Building Damages Using Polarimetric SAR Data. Remote Sens. 2020, 12, 137. [Google Scholar] [CrossRef]
- Al-Khudhairy, D.; Caravaggi, I.; Giada, S. Structural Damage Assessments from Ikonos Data Using Change Detection, Object-Oriented Segmentation, and Classification Techniques. Photogramm. Eng. Remote Sens. 2005, 71, 825–837. [Google Scholar] [CrossRef]
- Ranjbar, H.R.; Ardalan, A.A.; Dehghani, H.; Saradjian, M.R. Using high-resolution satellite imagery to provide a relief priority map after earthquake. Nat. Hazards 2017, 90, 1087–1113. [Google Scholar] [CrossRef]
- Janalipour, M.; Taleai, M. Building change detection after earthquake using multi-criteria decision analysis based on extracted information from high spatial resolution satellite images. Int. J. Remote Sens. 2016, 38, 82–99. [Google Scholar] [CrossRef]
- Saha, S.; Bovolo, F.; Bruzzone, L. Building Change Detection in VHR SAR Images via Unsupervised Deep Transcoding. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1917–1929. [Google Scholar] [CrossRef]
- Liu, W.; Yamazaki, F. Bridge Damage Assessment Using Single Post-Event Terrasar-X Image. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 4833–4836. [Google Scholar]
- Li, Y.; Martinis, S.; Wieland, M. Urban flood mapping with an active self-learning convolutional neural network based on TerraSAR-X intensity and interferometric coherence. ISPRS J. Photogramm. Remote Sens. 2019, 152, 178–191. [Google Scholar] [CrossRef]
- Li, Q.; Gong, L.; Zhang, J. A correlation change detection method integrating PCA and multi- texture features of SAR image for building damage detection. Eur. J. Remote Sens. 2019, 52, 435–447. [Google Scholar] [CrossRef]
- Karimzadeh, S.; Matsuoka, M.; Miyajima, M.; Adriano, B.; Fallahi, A.; Karashi, J. Sequential SAR Coherence Method for the Monitoring of Buildings in Sarpole-Zahab, Iran. Remote Sens. 2018, 10, 1255. [Google Scholar] [CrossRef]
- Hajeb, M.; Karimzadeh, S.; Fallahi, A. Seismic damage assessment in Sarpole-Zahab town (Iran) using synthetic aperture radar (SAR) images and texture analysis. Nat. Hazards 2020, 103, 1–20. [Google Scholar] [CrossRef]
- Brando, G.; Rapone, D.; Spacone, E.; O’Banion, M.S.; Olsen, M.J.; Barbosa, A.R.; Faggella, M.; Gigliotti, R.; Liberatore, D.; Russo, S.; et al. Damage Reconnaissance of Unreinforced Masonry Bearing Wall Buildings after the 2015 Gorkha, Nepal, Earthquake. Earthq. Spectra 2017, 33, 243–273. [Google Scholar] [CrossRef]
- Bai, Y.; Adriano, B.; Mas, E.; Gokon, H.; Koshimura, S. Object-Based Building Damage Assessment Methodology Using Only Post Event ALOS-2/PALSAR-2 Dual Polarimetric SAR Intensity Images. J. Disaster Res. 2017, 12, 259–271. [Google Scholar] [CrossRef]
- Arciniegas, G.A.; Bijker, W.; Kerle, N.; Tolpekin, V.A. Coherence- and Amplitude-Based Analysis of Seismogenic Damage in Bam, Iran, Using ENVISAT ASAR Data. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1571–1581. [Google Scholar] [CrossRef]
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Müller-Wilm, U.; Gascon, F. Sen2Cor for Sentinel-2. In Proceedings of the Image and Signal Processing for Remote Sensing XXIII, Warsaw, Poland, 11–13 September 2017; Volume 10427. [Google Scholar]
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. J. Sens. 2017, 2017, 1–17. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
- Yu, H.; Chen, G.; Gu, H. A machine learning methodology for multivariate pore-pressure prediction. Comput. Geosci. 2020, 143, 104548. [Google Scholar] [CrossRef]
- Thanh, N.D.; Thang, L.T.; Trung, V.A.; Vinh, N.Q. Identify some aerodynamic parameters of a airplane using the spiking neural network. Vietnam. J. EARTH Sci. 2020, 42, 276–287. [Google Scholar] [CrossRef]
- Tamkuan, N.; Nagai, M. Fusion of Multi-Temporal Interferometric Coherence and Optical Image Data for the 2016 Kumamoto Earthquake Damage Assessment. ISPRS Int. J. Geo. Inf. 2017, 6, 188. [Google Scholar] [CrossRef]
- Kruse, F.; Lefkoff, A.; Boardman, J.; Heidebrecht, K.; Shapiro, A.; Barloon, P.; Goetz, A. The spectral image processing system (SIPS)—interactive visualization and analysis of imaging spectrometer data. Remote Sens. Environ. 1993, 44, 145–163. [Google Scholar] [CrossRef]
- Ng, H.-F. Automatic thresholding for defect detection. Pattern Recognit. Lett. 2006, 27, 1644–1649. [Google Scholar] [CrossRef]
- Zhang, J.; Li, P.; Wang, J. Urban Built-Up Area Extraction from Landsat TM/ETM+ Images Using Spectral Information and Multivariate Texture. Remote Sens. 2014, 6, 7339–7359. [Google Scholar] [CrossRef]
- Osgouei, P.E.; Kaya, S.; Sertel, E.; Alganci, U. Separating Built-Up Areas from Bare Land in Mediterranean Cities Using Sentinel-2A Imagery. Remote Sens. 2019, 11, 345. [Google Scholar] [CrossRef]
- Li, Y.; Tan, Y.; Li, Y.; Qi, S.; Tian, J. Built-Up Area Detection From Satellite Images Using Multikernel Learning, Multifield Integrating, and Multihypothesis Voting. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1190–1194. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Predicted | |||
|---|---|---|---|
| Built-Up | Non-Built-Up | ||
| Actual | Built-Up | TP | FN |
| Non-Built-Up | FP | TN | |
| Accuracy Index | Formula |
|---|---|
| OA | |
| BA | |
| F1-Score | |
| FA | |
| KC | |
| Precision | |
| Recall | |
| MD | |
| Specificity | |
| N | |
| Formula | Abbreviation | Index |
|---|---|---|
| NDWI2 | Second Normalized Difference Water Index | |
| , L is the slope of the soil line | WDVI | Weighted Difference Vegetation Index |
| TNDVI | Transformed Difference Vegetation Index | |
| BI2 | Second Brightness Index | |
| CI | Colour Index | |
| NIR-cos(a) × Red, a is the angle between the soil line and the NIR axis | PVI | Perpendicular Vegetation Index |
| RVI | Ratio Vegetation Index | |
RB = Red − Gamma × (Blue − Red), Gamma = 1 | ARVI | Atmospherically Resistant Vegetation Index |
| NDWI | Normalize Difference Water Index | |
| RI | Redness Index |
| NO. | Full Name | Formula | Description |
|---|---|---|---|
| 1 | Contrast | Degree of Spatial Frequency | |
| 2 | Correlation | Grey Tone Linear Dependencies in the Image | |
| 3 | Variance | Heterogeneity of Image | |
| 4 | Homogeneity | Image Homogeneity | |
| 5 | Sum Average | The Mean of the Gray Level Sum Distribution Of The Image | |
| 6 | Entropy | The randomness of Intensity Distribution | |
| 7 | Dissimilarity | Total Variation Present |
| Method | Region | OA | Precision | MD | FA | F1-Score | Recall | Specificity | KC |
|---|---|---|---|---|---|---|---|---|---|
| ND-Based | Sarpol-Zahab | 62.37 | 0.461 | 0.304 | 0.413 | 0.555 | 0.696 | 0.587 | 0.252 |
| Qasr-Shirin | 75.07 | 0.611 | 0.727 | 0.066 | 0.377 | 0.273 | 0.933 | 0.249 | |
| Proposed | Sarpol-Zahab | 89.44 | 0.885 | 0.2107 | 0.052 | 0.834 | 0.789 | 0.947 | 0.757 |
| Qasr-Shirin | 95.88 | 0.964 | 0.115 | 0.013 | 0.922 | 0.885 | 0.987 | 0.894 |
| Ground Truth | |||||||
|---|---|---|---|---|---|---|---|
| No-Damage | Low-Damage | Medium-Damage | Heavy-Damage | Classification Overall | User’s Accuracy (%) | ||
| Predicted | No-Damage | 10 | 2 | 3 | 5 | 20 | 50 |
| Low-Damage | 0 | 0 | 0 | 0 | 0 | 0 | |
| Medium-Damage | 0 | 0 | 0 | 0 | 0 | 0 | |
| Heavy-Damage | 0 | 0 | 0 | 0 | 0 | 0 | |
| Truth Overall | 10 | 2 | 0 | 0 | 20 | ------ | |
| Producer’s accuracy (%) | 100 | 0 | 0 | 0 | ------ | ------ | |
| Overall accuracy (%) | 50 | ||||||
| Ground Truth | |||||||
|---|---|---|---|---|---|---|---|
| No-Damage | Low-Damage | Medium-Damage | Heavy-Damage | Classification Overall | User’s Accuracy (%) | ||
| Predicted | No-Damage | 6 | 0 | 0 | 0 | 6 | 100 |
| Low-Damage | 1 | 2 | 0 | 0 | 3 | 66.67 | |
| Medium-Damage | 2 | 0 | 2 | 1 | 5 | 40 | |
| Heavy-Damage | 1 | 0 | 1 | 4 | 6 | 66.67 | |
| Truth Overall | 10 | 2 | 3 | 5 | 20 | ------ | |
| Producer’s accuracy (%) | 60 | 100 | 66.67 | 80 | ------ | ------ | |
| Overall accuracy (%) | 70 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hasanlou, M.; Shah-Hosseini, R.; Seydi, S.T.; Karimzadeh, S.; Matsuoka, M. Earthquake Damage Region Detection by Multitemporal Coherence Map Analysis of Radar and Multispectral Imagery. Remote Sens. 2021, 13, 1195. https://doi.org/10.3390/rs13061195
Hasanlou M, Shah-Hosseini R, Seydi ST, Karimzadeh S, Matsuoka M. Earthquake Damage Region Detection by Multitemporal Coherence Map Analysis of Radar and Multispectral Imagery. Remote Sensing. 2021; 13(6):1195. https://doi.org/10.3390/rs13061195
Chicago/Turabian StyleHasanlou, Mahdi, Reza Shah-Hosseini, Seyd Teymoor Seydi, Sadra Karimzadeh, and Masashi Matsuoka. 2021. "Earthquake Damage Region Detection by Multitemporal Coherence Map Analysis of Radar and Multispectral Imagery" Remote Sensing 13, no. 6: 1195. https://doi.org/10.3390/rs13061195
APA StyleHasanlou, M., Shah-Hosseini, R., Seydi, S. T., Karimzadeh, S., & Matsuoka, M. (2021). Earthquake Damage Region Detection by Multitemporal Coherence Map Analysis of Radar and Multispectral Imagery. Remote Sensing, 13(6), 1195. https://doi.org/10.3390/rs13061195