
Influence of the Low-Frequency Error of the Residual Orbit on Recovering Time-Variable Gravity Field from the Satellite-To-Satellite Tracking Mission

 ,
,
Abstract
1. Introduction
2. Methodology
2.1. Non-Linear Correction
2.2. The Low-Frequency Error
3. The Low-Frequency Error Processing
3.1. Simulation
3.2. Real Data Processing
3.2.1. Background Model
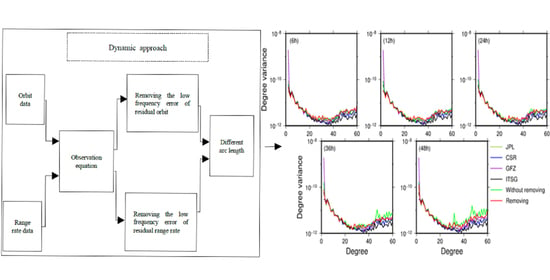
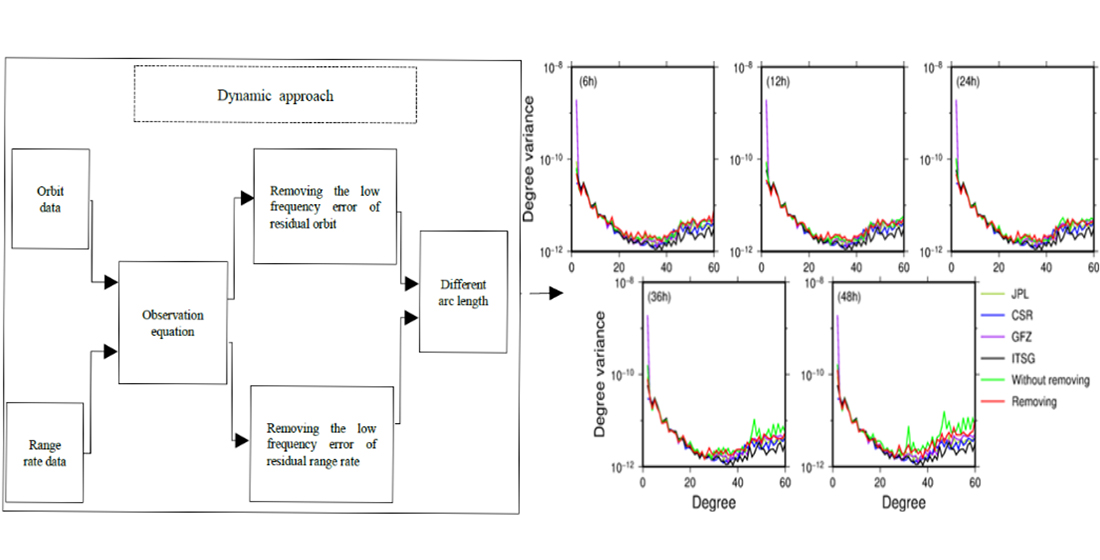
3.2.2. Different Arc Length Processing
4. The Monthly Time-Variable Gravity Field Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
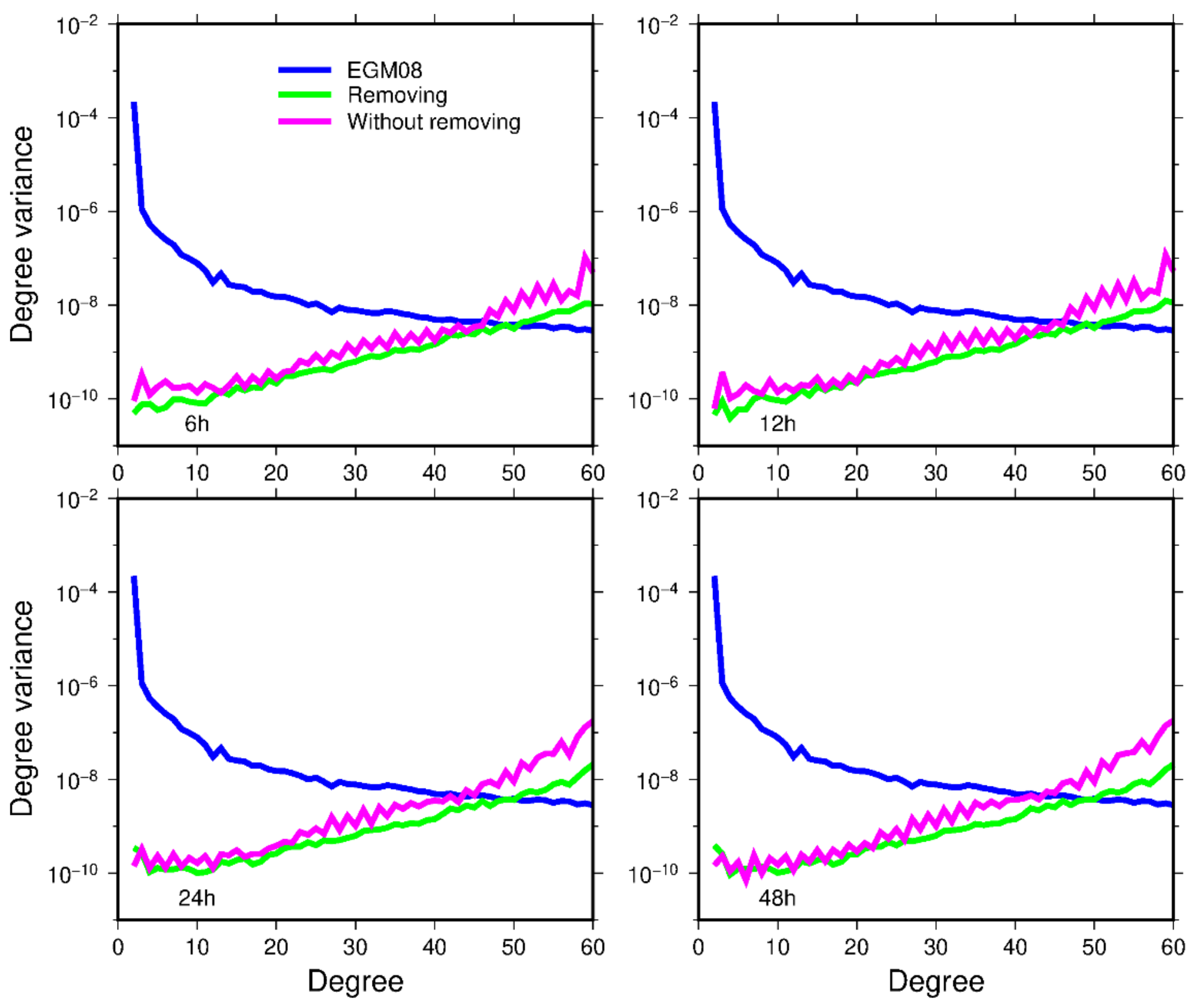
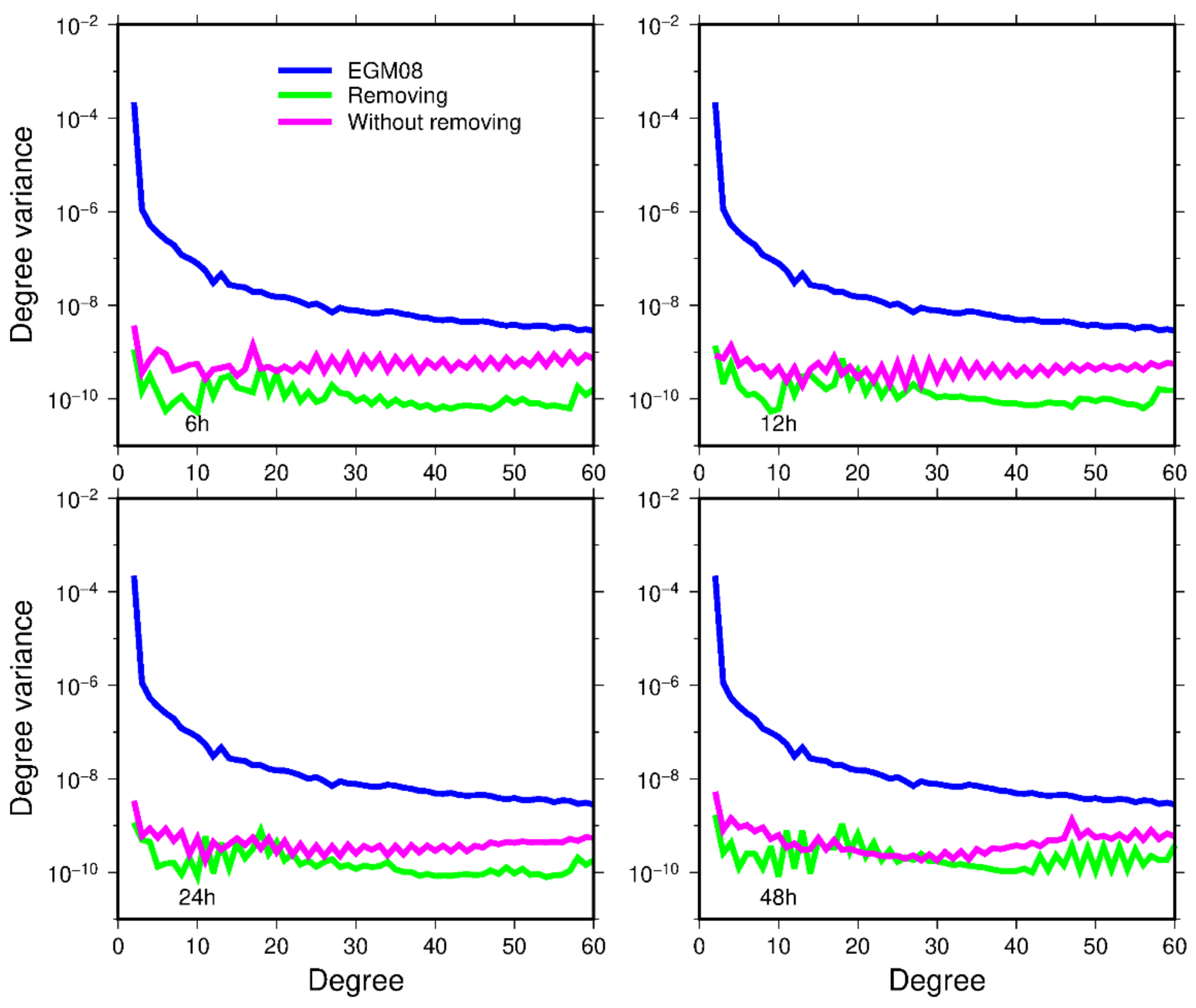
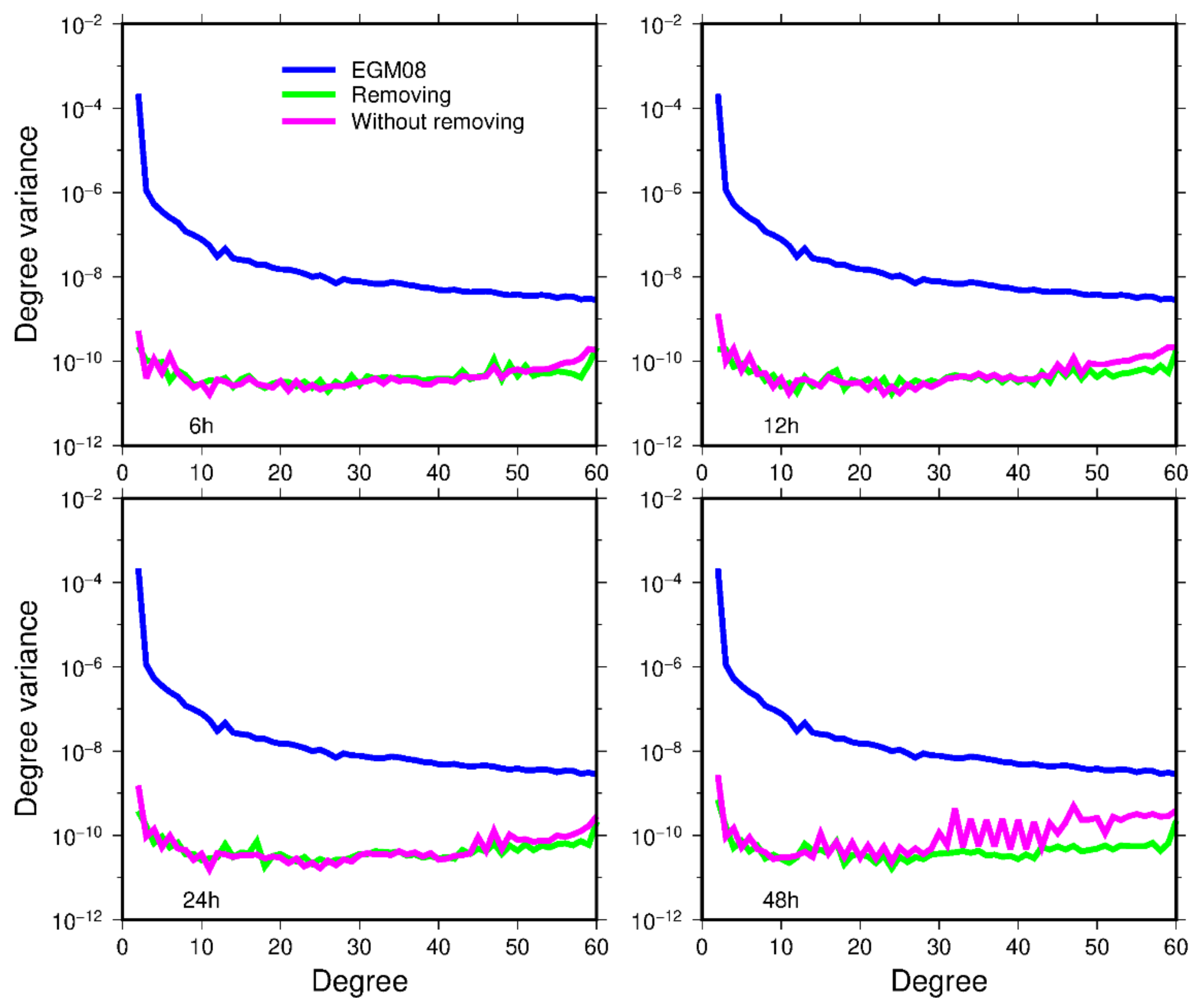
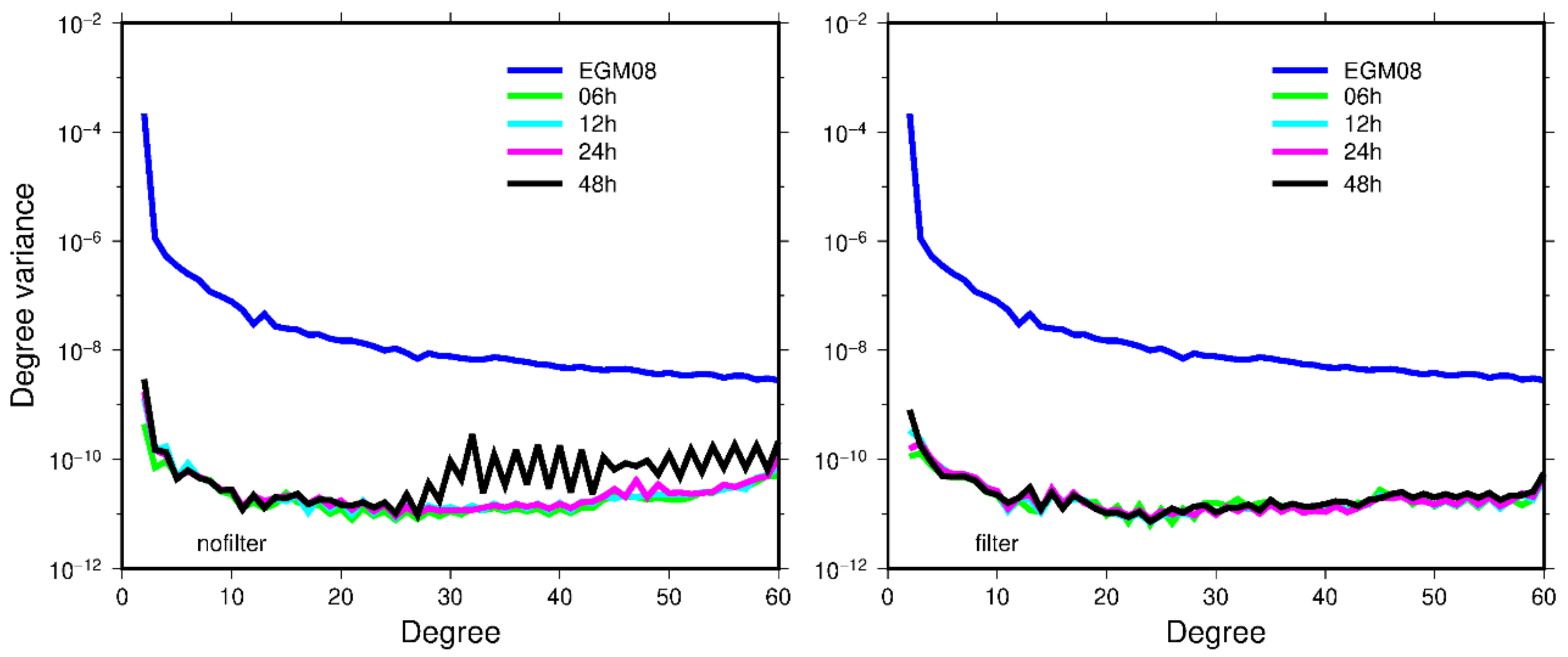
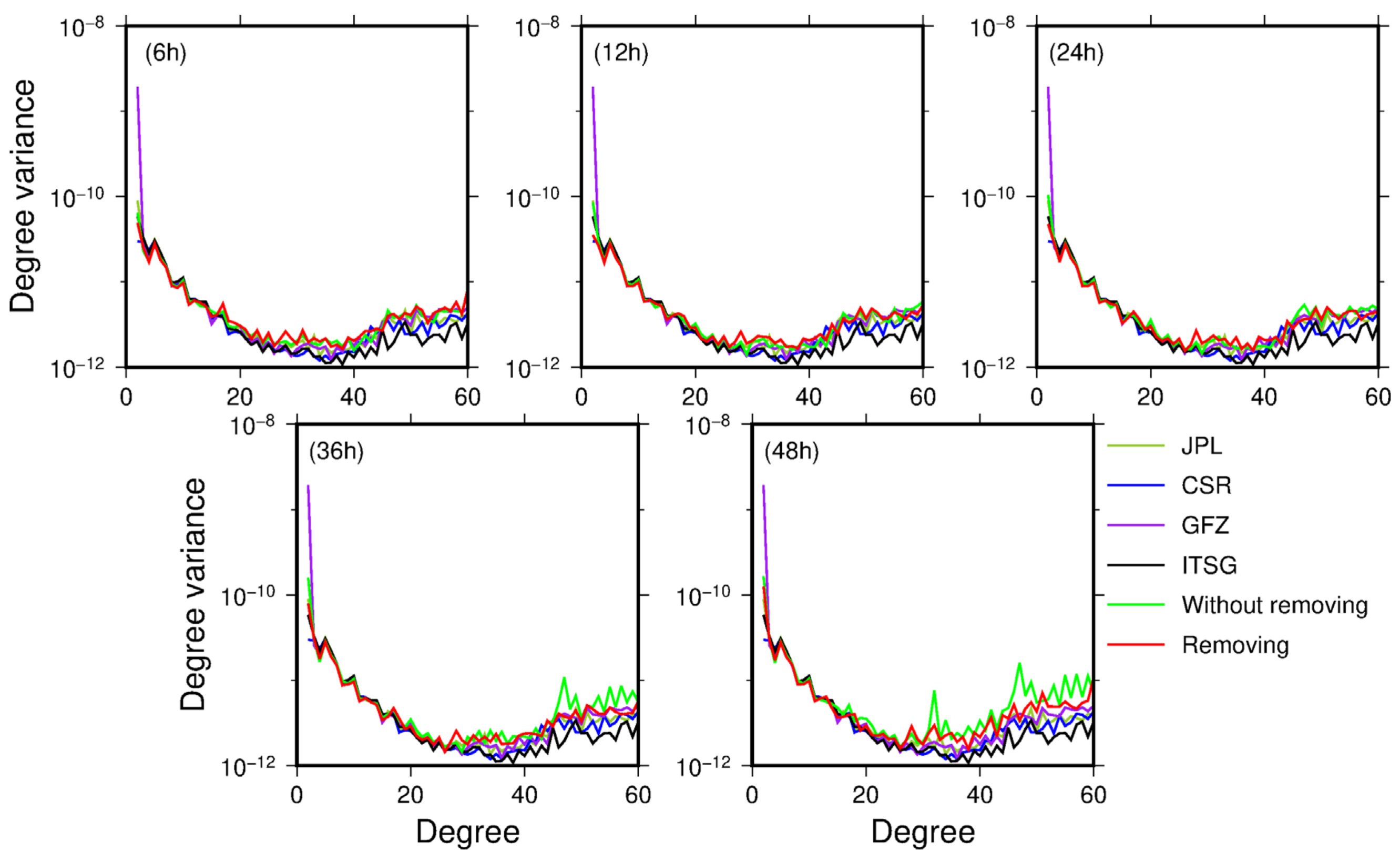
Appendix A. Degree Variance
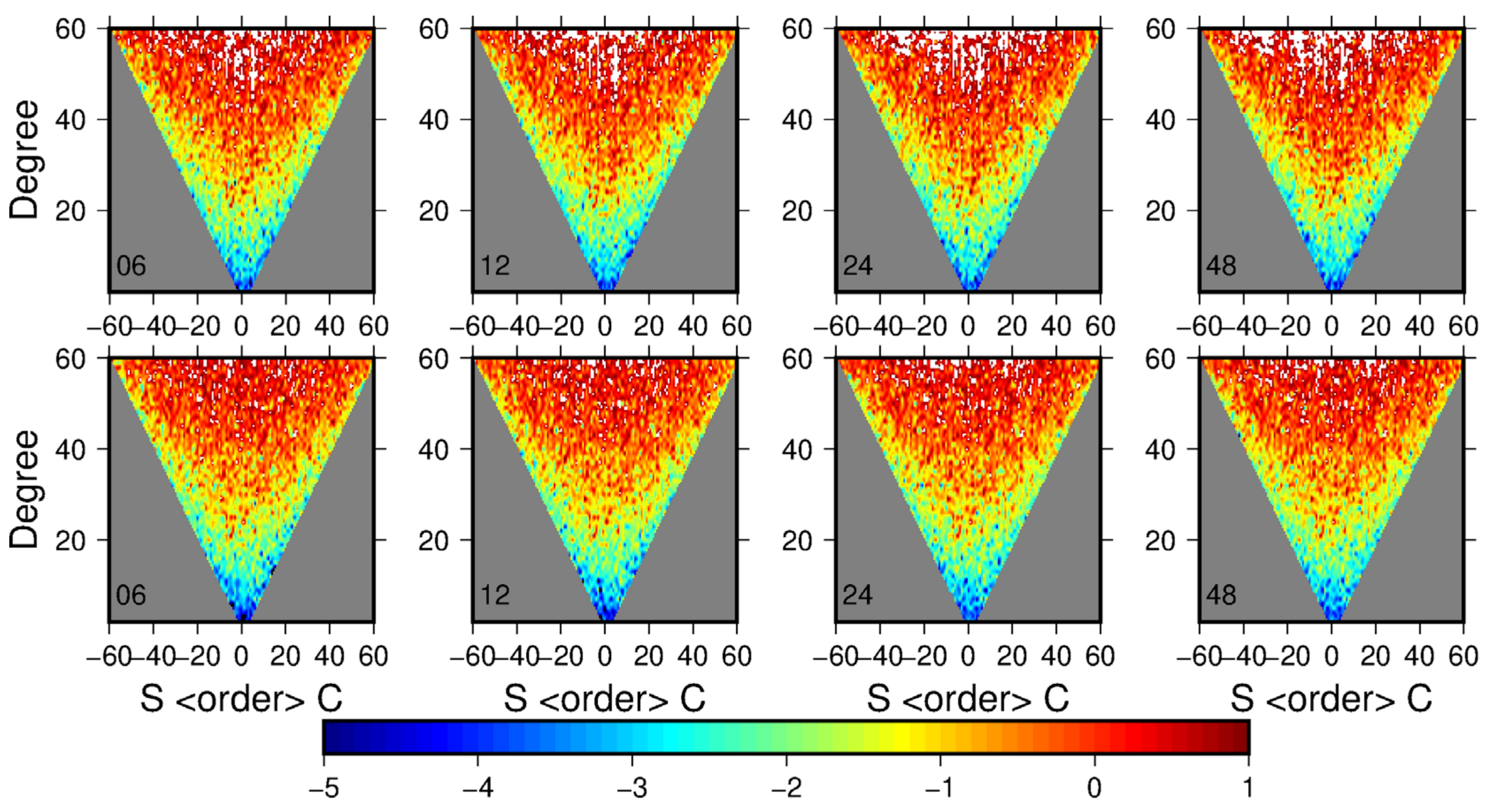
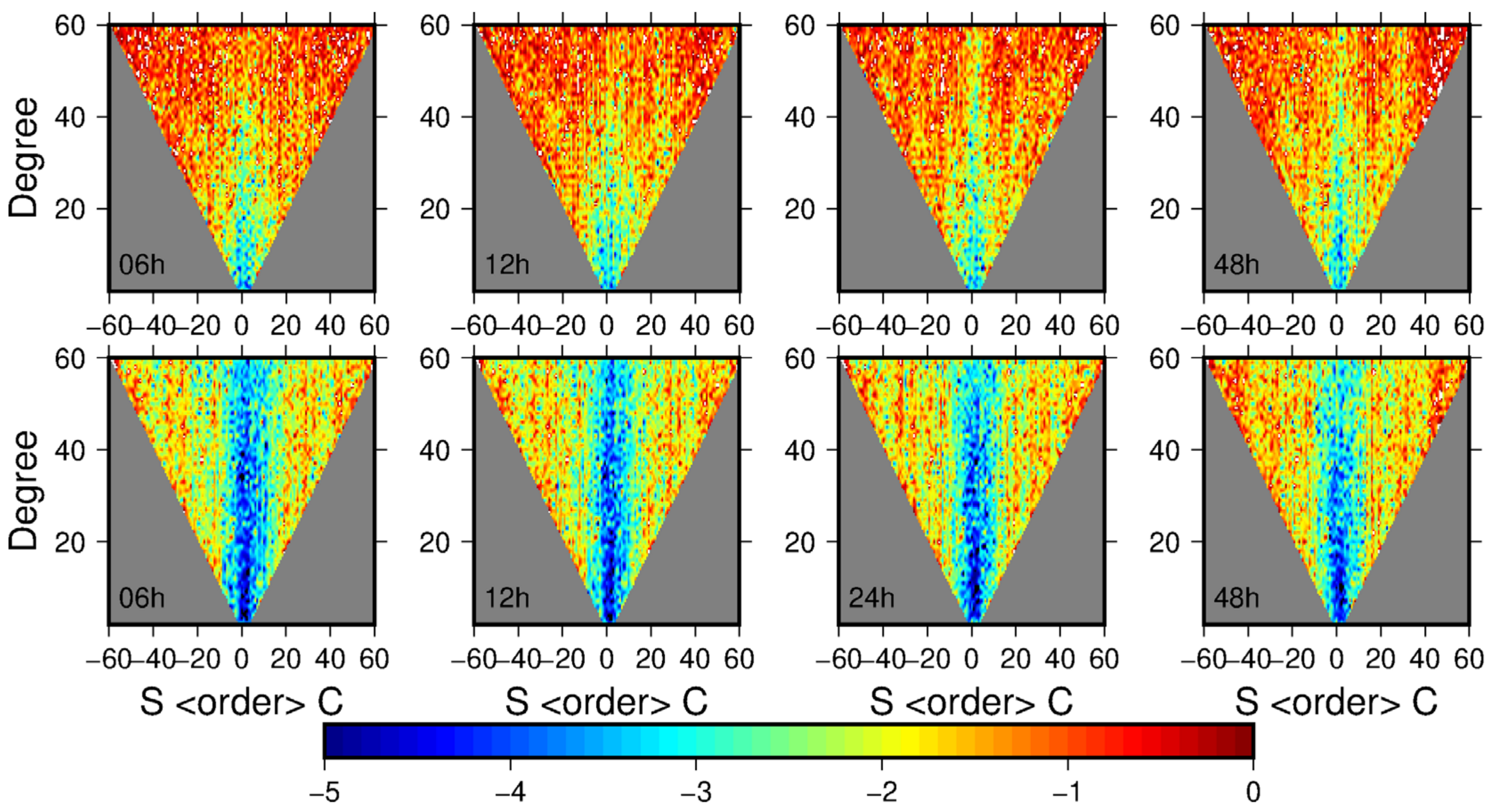
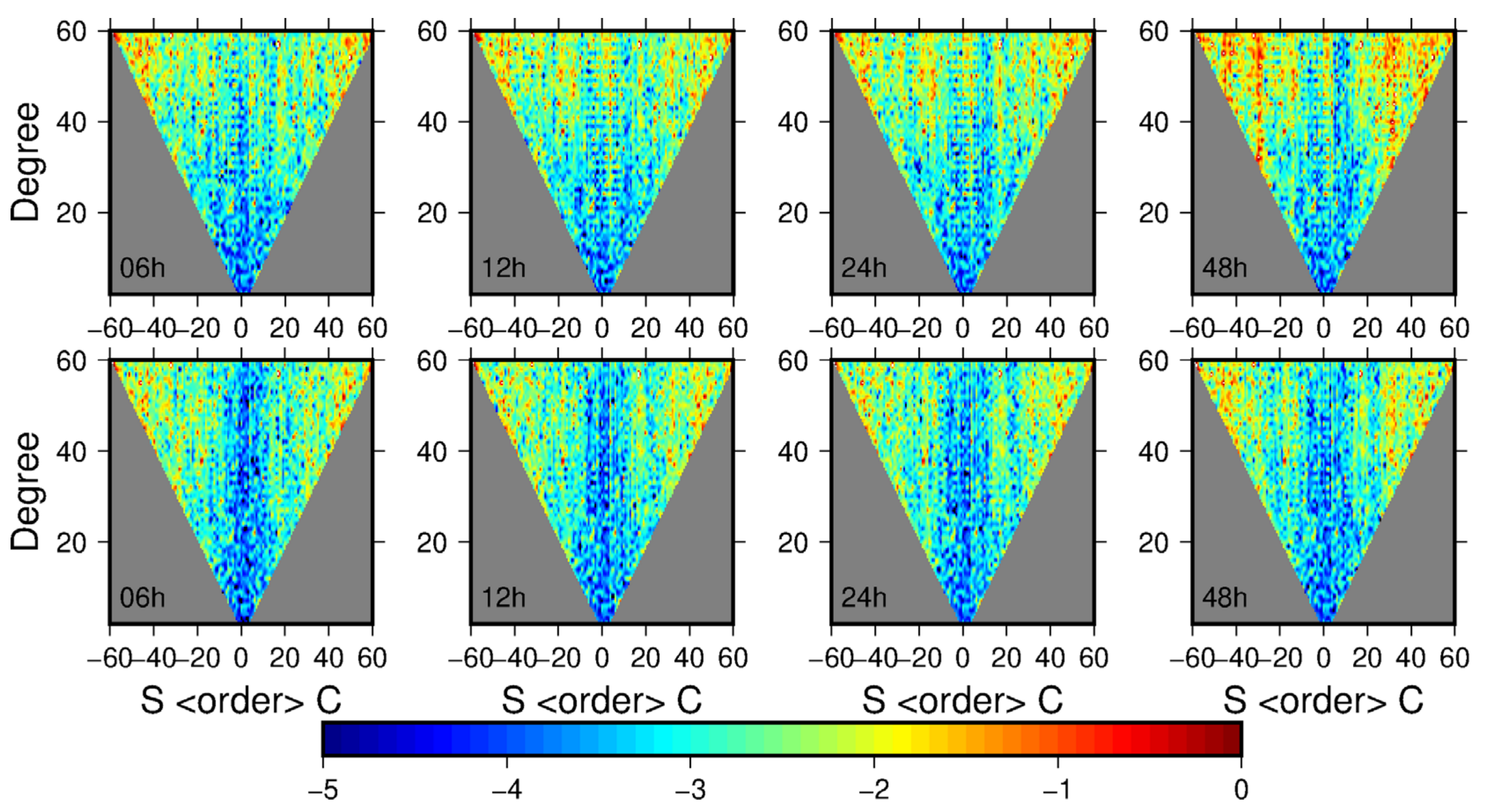
Appendix B. The Logarithm of Formal Errors
References
- Tapley, B.D.; Bettadpur, S.; Ries, J.C.; Thompson, P.F.; Watkins, M.M. GRACE measurements of mass variability in the Earth system. Science 2004, 305, 503–505. [Google Scholar] [CrossRef] [PubMed]
- Tapley, B.D.; Bettadpur, S.; Watkins, M.; Reigber, C. The gravity recovery and climate experiment: Mission overview and early results. Geophys. Res. Lett. 2004, 31, L09607. [Google Scholar] [CrossRef]
- Tapley, B.D.; Ries, J.; Bettadpur, S.; Chambers, D.; Cheng, M.; Condi, F.; Gunter, B.; Kang, Z.; Nagel, P.; Pastor, R.; et al. GGM02- an improved earth gravity field model from GRACE. J. Geod. 2005, 79, 467–478. [Google Scholar] [CrossRef]
- Bettadpur, S. Gravity Recovery and Climate Experiment UTCSR Level-2 Processing Standards Document for Level-2 Product Release 005. Available online: https://www.researchgate.net/publication/289630299_UTCSR_Level-2_Processing_Standards_Document_for_Level-2_Product_Release_0005_Center_for_Space_Research_Technical_Report_GRACE (accessed on 4 February 2021).
- Dahle, C.; Flechtner, F.; Gruber, C.; König, D.; König, R.; Michalak, G.; Neumayer, K.H. GFZ GRACE level-2 processing standards document for level-2 product release 0005. Sci. Tech. Rep. Data 2012, 12, 1–21. [Google Scholar]
- Save, H.; Bettadpur, S.; Tapley, B.D. High-resolution CSR GRACE RL05 mascons. J. Geophys. Res. Solid Earth 2016, 121, 7547–7569. [Google Scholar] [CrossRef]
- Watkins, M.M.; Wiese, D.; Yuan, D.N.; Boening, C.; Landerer, F.W. Improving methods for observing Earth’s time variable mass distribution with GRCE using spherical cap mascons. J. Geophys. Res. Solid Earth 2015, 120, 2648–2671. [Google Scholar] [CrossRef]
- Zhou, H.; Luo, Z.C.; Zhou, Z.B.; Li, Q.; Zhong, B.; Lu, B.; Hsu, H.Z. Impact of different kinematic empirical parameters processing strategies on temporal gravity field model determination. J. Geophys. Res. Solid Earth 2018, 123, 1–25. [Google Scholar] [CrossRef]
- Guo, X.; Zhao, Q.L.; Ditmar, P.; Sun, Y.; Liu, J.N. Improvements in the monthly gravity field solutions through modeling the colored noise in the GRACE data. J. Geophys. Res. Solid Earth 2018, 123, 7040–7054. [Google Scholar] [CrossRef]
- Liang, L.; Yu, J.H.; Zhu, Y.C.; Wan, X.Y.; Chang, L.; Huan, X.; Wang, K. Recovered GRACE time-variable gravity field based on dynamic approach with the non-linear corrections. Chin. J. Geophys. 2019, 62, 3259–3268. (In Chinese) [Google Scholar]
- Mayer-Gürr, T. Gravitationsfeldbestimmung aus der Analyse kurzer Bahnbögen am Beispielder Satellitenmissionen CHAMP und GRACE; University of Bonn: Bonn, Germany, 2006. [Google Scholar]
- Kurtenbach, E.; Mayer-Gürr, T.; Eicker, A. Deriving daily snapshots of the Earth’s gravity field from GRACE L1B data using Kalman filtering. Geophys. Res. Lett. 2009, 36, L17102. [Google Scholar] [CrossRef]
- Chen, Q.J.; Shen, Y.Z.; Chen, W.; Zhang, X.F.; Hsu, H.Z. An improved GRACE monthly gravity field solution by modeling the non-conservative acceleration and attitude observation errors. J. Geod. 2016, 90, 503–523. [Google Scholar] [CrossRef]
- Chen, Q.J.; Shen, Y.Z.; Olivier, F.; Chen, W.; Zhang, X.F.; Hsu, H.Z. Tongji-Grace02s and Tongji-Grace02k: High-precision static GRACE-only global Earth’s gravity field models derived by refined data processing strategies. J. Geophys. Res. Solid Earth 2018, 123, 6111–6137. [Google Scholar] [CrossRef]
- Chen, Q.J.; Shen, Y.Z.; Chen, W.; Olivier, F.; Zhang, X.F.; Chen, Q.; Li, W.W.; Chen, T.Y. An optimized short-arc approach: Methodology and application to develop refined time series of Tongji-Grace2018 GRACE monthly solutions. J. Geophys. Res. Solid Earth 2019, 124, 6010–6038. [Google Scholar] [CrossRef]
- Ditmar, P.; Sluijs, A.A.V.E.V.D. A technique for modeling the Earth’s gravity field on the basis of satellite accelerations. J. Geod. 2004, 78, 12–33. [Google Scholar] [CrossRef]
- Ditmar, P.; Kuznetsov, V.; van der Sluijs, A.V.A.; Schrama, E.; Klees, R. ‘DEOS_CHAMP-01C_70’: A model of the Earth’s gravity field computed from accelerations of the CHAMP satellite. J. Geod. 2006, 79, 586–601. [Google Scholar] [CrossRef][Green Version]
- Liu, X. Global Gravity Field Recovery from Satellite-to-Satellite Tracking Data with the Acceleration Approach; Delft University of Technology: Delft, The Netherlands, 2008. [Google Scholar]
- Liu, X.; Ditmar, P.; Siemes, C.; Slobbe, D.C.; Revtova, E.; Klees, R.; Riva, R.; Zhao, Q. DEOS Mass Transport model (DMT-1) based on GRACE satellite data: Methodology and validation. Geophys. J. Int. 2010, 181, 769–788. [Google Scholar] [CrossRef]
- Beutler, G.; Jäggi, A.; Mervart, L.; Meyer, U. The celestial mechanics approach: Theoretical foundations. J. Geod. 2010, 84, 605–624. [Google Scholar] [CrossRef]
- Beutler, G.; Jäggi, A.; Mervart, L.; Meyer, U. The celestial mechanics approach: Application to data of the GRACE mission. J. Geod. 2010, 84, 661–681. [Google Scholar] [CrossRef]
- Jekeli, C. The determination of gravitational potential differences from satellite-to-satellite tracking. Celest. Mech. Dyn. Astron. 1999, 75, 85–100. [Google Scholar] [CrossRef]
- Han, S.C.; Shum, C.K.; Jekeli, C. Precise estimation of in situ geopotential differences from GRACE low-low satellite-to-satellite tracking and accelerometer data. J. Geophys. Res. 2006, 111, B04411. [Google Scholar] [CrossRef]
- Ramillien, G.; Biancale, R.; Gratton, S.; Vasseur, X.; Bourgogne, S. GRACE-derived surface water mass anomalies by energy integral approach: Application to continental hydrology. J. Geod. 2011, 6, 313–328. [Google Scholar] [CrossRef]
- Tangdamrongsub, N.; Hwang, C.; Wang, L. Regional surface mass anomalies from GRACE KBR measurements: Application of L-curve reqularinzation and a priori hydrological knowledge. J. Geophys. Res. 2012, 117, B11406. [Google Scholar]
- Zeng, Y.Y.; Guo, J.Y.; Shang, K.; Shum, C.K.; Yu, J.H. On the formulation of gravitational potential difference between the GRACE satellites based on energy integral in earth fixed frame. Geophys. J. Int. 2015, 202, 1792–1804. [Google Scholar] [CrossRef]
- Shang, K.; Guo, J.Y.; Shum, C.K.; Dai, C.L.; Luo, J. GRACE time-variable gravity field recovery using an improved energy balance approach. Geophys. J. Int. 2015, 203, 1773–2786. [Google Scholar] [CrossRef]
- Watkins, M.M.; Yuan, D.N. GRACE JPL Level-2 Processing Standards Document for Level-2 Product Release 05; GRACE 327-744(v 5.0); 2012; Available online: ftp://isdcftp.gfz-posdam.de/grace/ (accessed on 4 February 2021).
- Kim, J. Simulation Study of a Low-Low Satellite-to-Satellite Tracking Mission; The University of Texas at Austin: Austin, TX, USA, 2000. [Google Scholar]
- Zhao, Q.L.; Guo, J.; Hu, Z.G.; Shi, C.; Liu, J.N.; Cai, H.; Liu, X.L. GRACE gravity field modeling with an investigation on correlation between nuisance parameters and gravity field coefficients. Adv. Space Res. 2011, 47, 1833–1850. [Google Scholar] [CrossRef]
- Visser, P. Low-low satellite-to-satellite tracking: A comparison between analytical linear orbit perturbation theory and numerical integration. J. Geod. 2005, 79, 160–166. [Google Scholar] [CrossRef]
- Bruinsma, S.; Lemoine, J.M.; Biancale, R.; Valeś, N. CNES/GRGS 10-day gravity field models (release 2) and their evaluation. Adv. Space Res. 2010, 45, 587–601. [Google Scholar] [CrossRef]
- Meyer, U.; Jäggi, A.; Beutler, G. Monthly gravity field solutions based on GRACE observations generated with the Celestial Mechanics Approach. Earth Planet Sci. Lett. 2012, 345–348, 72–80. [Google Scholar] [CrossRef]
- Ditmar, P.; da Encarnação, J.T.; Farahani, F.F. Understanding data noise in gravity field recovery on the basis of inter-satellite ranging measurements acquired by the satellite gravimetry mission GRACE. J. Geod. 2012, 86, 441–465. [Google Scholar] [CrossRef]
- Hashemi Farahani, H.; Ditmar, P.; Klees, R.; Liu, X.; Zhao, Q.; Guo, J. The static gravity field model DGM-1S from GRACE and GOCE data: Computation, validation and an analysis of GOCE mission’s added value. J. Geod. 2013, 87, 843–867. [Google Scholar] [CrossRef]
- Wang, C.Q.; Xu, H.Z.; Zhong, M.; Feng, W.; Ran, J.J.; Yang, F. An investigation on GRACE temporal gravity field recovery using the dynamic approach. Chin. J. Geophys. 2015, 58, 756–766. (In Chinese) [Google Scholar]
- Luo, Z.C.; Zhou, H.; Li, Q.; Zhong, B. A new-time-variable gravity field model recovered by dynamic integral approach on the basis of GRACE KBRR data alone. Chin. J. Geophys. 2015, 59, 1994–2005. (In Chinese) [Google Scholar]
- Colombo, O.L. The Global Mapping of Gravity with Two Satellite; Publications on Geodesy, New Series; Netherlands Geodetic Commission: Delft, Switzerland, 1984. [Google Scholar]
- Seo, K.W.; Wilson, C.R.; Chen, J.L.; Waliser, D.E. GRACE’s spatial aliasing error. Geophys. J. Int. 2008, 172, 41–48. [Google Scholar] [CrossRef]
- Kaula, W.M. Theory of Satellite Geodesy: Applications of Satellites to Geodesy; Blaisdell: Waltham, MA, USA, 1966. [Google Scholar]
- Montenbruck, O.; Gill, E. Satellite Orbits; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Reigber, C. Gravity field recovery from satellite tracking data. In Theory of Satellite Geodesy and Gravity Field Determination—Lecture Notes in Earth Sciences; Sansό, F., Rummel, R., Eds.; Springer: Berlin/Heidelberg, Germany, 1989; pp. 197–234. [Google Scholar]
- Tapley, B.D. Fundamentals of orbit determination. In Theory of Satellite Geodesy and Gravity Field Determination—Lecture notes in Earth Sciences; Sansό, F., Rummel, R., Eds.; Springer: Berlin/Heidelberg, Germany, 1989; pp. 235–260. [Google Scholar]
- Yu, J.H.; Zhu, Y.C.; Meng, X.C. Orbital perturbation differential equations with non-linear corrections for Champ-like satellite. Chin. J. Geophy. 2017, 60, 286–299. [Google Scholar]
- Xu, P. Position and velocity perturbations for the determination of geopotential from space geodetic measurements. Celest. Mech. Dyn. Astron. 2008, 100, 231–249. [Google Scholar] [CrossRef]
- Heiskanen, W.A.; Moritz, H. Physical Geodesy; Freeman, W.H. and company: San Fracisco, CA, USA, 1967; pp. 1–32. [Google Scholar]
- Petit, G.; Luzum, B. IERS Conventions; Bonifatius GmbH: Paderborn, Germany, 2010. [Google Scholar]
- Kaplan, M.H. Modern Spacecraft Dynamics & Control; Wiley: New York, NY, USA, 1976. [Google Scholar]
- McCullough, G.M. Gravity Field Estimation for Next Generation Satellite Missions; University of Texas at Austin: Austin, TX, USA, 2007. [Google Scholar]
- Ries, J.; Bettadpur, S.; Eanes, R.; Kang, Z.; Ko, U.; McCullough, C.; Nagel, P.; Pie, N.; Poole, S.; Richter, T.; et al. The Combination Global Gravity Model GGM05C; The University of Texas at Austin: Austin, TX, USA, 2016. [Google Scholar]
- Bandikova, T.; Flury, J. Improvement of the GRACE star camera data based on the revision of the combination method. Adv. Space Res. 2014, 54, 1818–1827. [Google Scholar] [CrossRef]
- Bandikova, T. The Role of Attitude Determination for Inter-Satellite Ranging. Ph.D. Thesis, Leibniz University of Hannover, Hannover, Germany, 2015. [Google Scholar]
- Chen, Q.J.; Shen, Y.Z.; Zhang, X.F.; Hsu, H.Z.; Chen, W.; Ju, X.L.; Lou, L.Z. Monthly gravity field models derived from GRACE Level 1B data using a modified short-arc approach. J. Geophys. Res. Solid Earth 2015, 120, 1804–1819. [Google Scholar] [CrossRef]
- Cheng, M.K.; Tapley, B.D. Variations in the Earth’s oblateness during the past 28 years. J. Geophys. Res. 2004, 109, B09402. [Google Scholar] [CrossRef]
- Swenson, S.; Wahr, J. Post-processing removal of correlated errors in GRACE data. Geophys. Res. Lett. 2006, 33, L08402. [Google Scholar] [CrossRef]
- Wahr, J.; Swenson, S.; Zlotnicki, V.; Velicogna, I. Time-variable gravity from GRACE: First results. Geophys. Res. Lett. 2004, 31, L11501. [Google Scholar] [CrossRef]
- Yang, F.; Wang, C.Q.; Hus, H.Z.; Zhong, M.; Zhou, Z.B. Towards a more accurate temporal gravity model from GRACE observations through the kinematic orbits. Chin. J. Geophys. 2017, 60, 37–49. (In Chinese) [Google Scholar]
- Ran, J.J.; Xu, H.Z.; Zhong, M.; Feng, W.; Shen, Y.Z.; Zhang, X.F.; Yi, W.Y. Global temporal gravity field recovery using GRACE data. Chin. J. Geophys. 2014, 57, 1032–1040. (In Chinese) [Google Scholar]
- Shen, Y.Z. Algorithm characteristics of dynamic approach-based satellite gravimetry and its improvement proposals. Acta Geod. Cartogr. Sin. 2017, 46, 1308–1315. [Google Scholar]
- Ray, R.D.; Luthcke, S.B. Tide model errors and GRACE gravimetry: Towards a more realistic assessment. Geophys. J. Int. 2006, 167, 1055–1059. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Force Model | Description |
|---|---|
| Static gravity field model | GGM05C(180*180) |
| N-body perturbation | JPL DE421 |
| Solid Earth tides | IERS 2010 Conventions |
| Solid Earth pole tides | IERS mean pole |
| Ocean tides | EOT11a(100*100) |
| Ocean pole tide | Desai model(100*100) |
| Atmospheric and Oceanic de-aliasing | AOD1B RL06(180*180) |
| General Relativistic | IERS 2010 conventions |
| Non-gravitational forces | Onboard accelerometer data |
| Correlation Coefficients | CSR | GFZ | JPL |
|---|---|---|---|
| Sahara desert | 0.85 | 0.80 | 0.87 |
| Yangtze River Basin | 0.99 | 0.98 | 0.99 |
| Greenland Island | 0.95 | 0.91 | 0.96 |
| Amazon Basin | 0.99 | 0.99 | 0.99 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, L.; Yu, J.; Wang, C.; Zhong, M.; Feng, W.; Wan, X.; Chen, W.; Yan, Y. Influence of the Low-Frequency Error of the Residual Orbit on Recovering Time-Variable Gravity Field from the Satellite-To-Satellite Tracking Mission. Remote Sens. 2021, 13, 1118. https://doi.org/10.3390/rs13061118
Liang L, Yu J, Wang C, Zhong M, Feng W, Wan X, Chen W, Yan Y. Influence of the Low-Frequency Error of the Residual Orbit on Recovering Time-Variable Gravity Field from the Satellite-To-Satellite Tracking Mission. Remote Sensing. 2021; 13(6):1118. https://doi.org/10.3390/rs13061118
Chicago/Turabian StyleLiang, Lei, Jinhai Yu, Changqing Wang, Min Zhong, Wei Feng, Xiaoyun Wan, Wei Chen, and Yihao Yan. 2021. "Influence of the Low-Frequency Error of the Residual Orbit on Recovering Time-Variable Gravity Field from the Satellite-To-Satellite Tracking Mission" Remote Sensing 13, no. 6: 1118. https://doi.org/10.3390/rs13061118
APA StyleLiang, L., Yu, J., Wang, C., Zhong, M., Feng, W., Wan, X., Chen, W., & Yan, Y. (2021). Influence of the Low-Frequency Error of the Residual Orbit on Recovering Time-Variable Gravity Field from the Satellite-To-Satellite Tracking Mission. Remote Sensing, 13(6), 1118. https://doi.org/10.3390/rs13061118