
Google Earth Engine Sentinel-3 OLCI Level-1 Dataset Deviates from the Original Data: Causes and Consequences



Abstract
1. Introduction
2. Materials and Methods
2.1. OLCI
2.1.1. Products Overview
- level-1:
- -
- top of atmosphere (TOA) radiance per band
- level-2
- -
- integrated water vapour (IVW)
- -
- OLCI (MERIS) terrestrial chlorophyll index (OTCI, MTCI)
- -
- OLCI (MERIS) global vegetation index (OGVI, MGVI)
- -
- top of canopy (TOC) red (681 nm) and near-infrared (865 nm) reflectance
2.1.2. Time Series Applications for Land
2.1.3. OLCI Level-1 Full Resolution Product
2.2. Workflow
2.2.1. Time Series Preparation
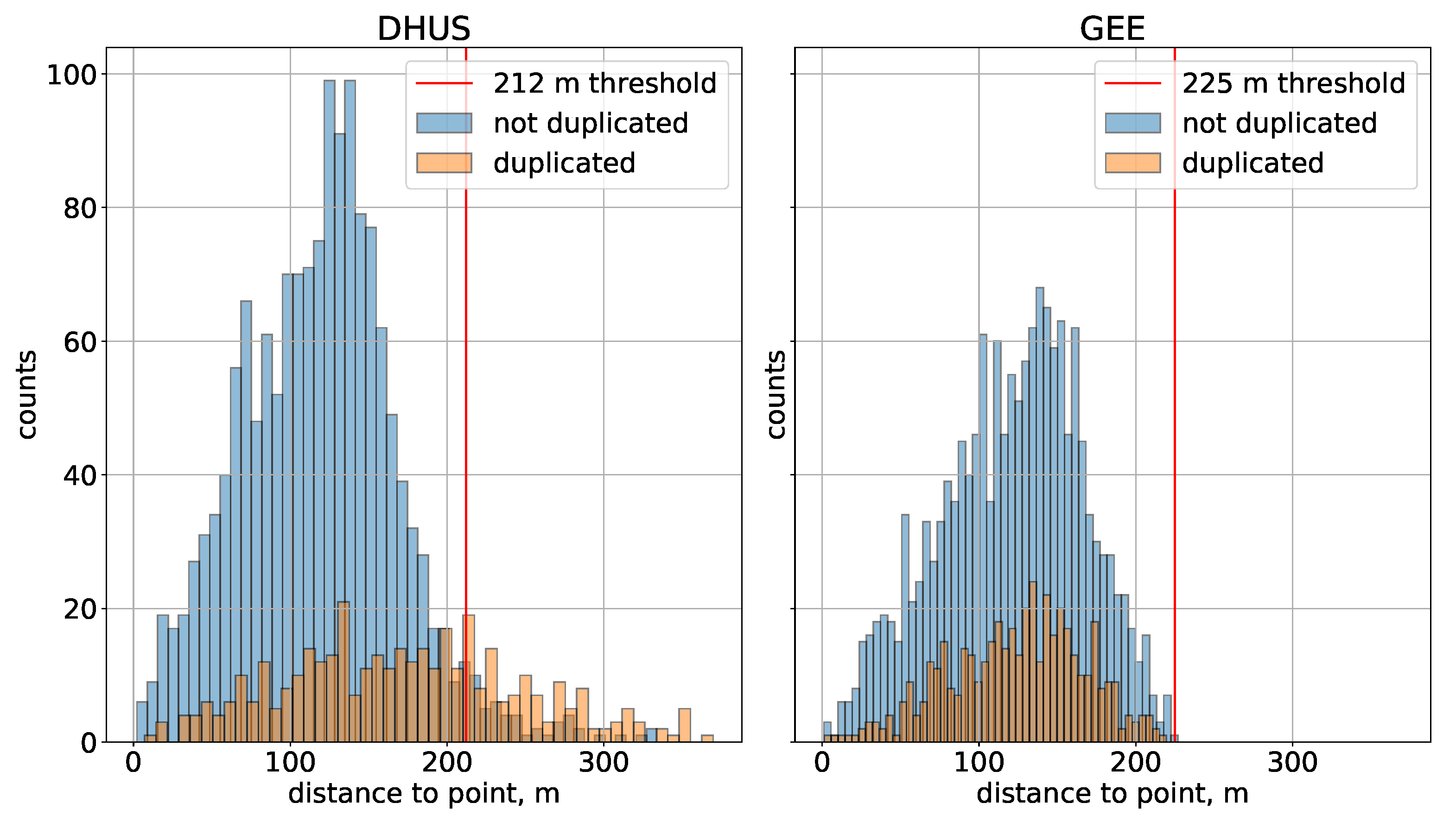
2.2.2. Distance Control
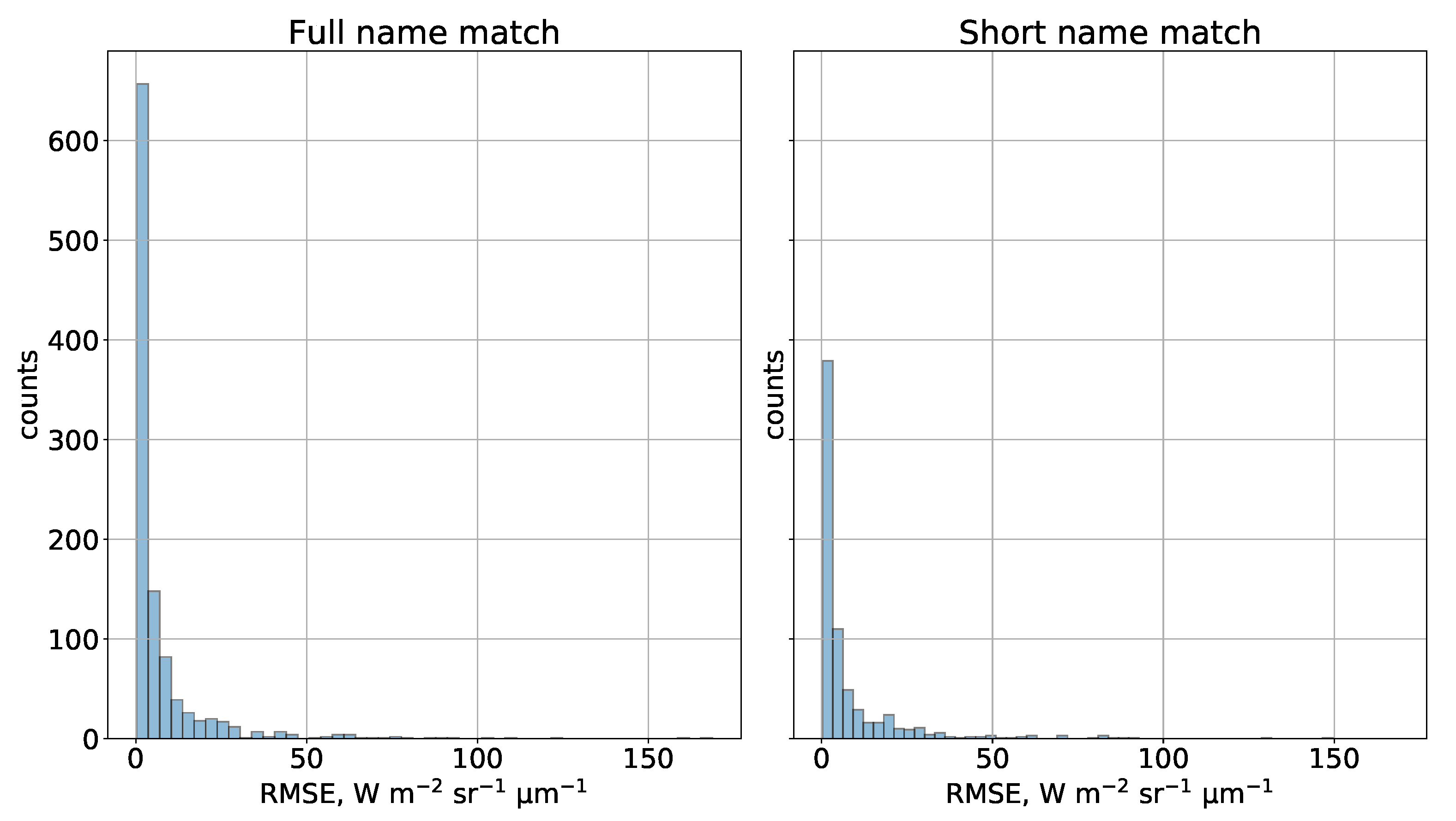
2.2.3. GEE and DHUS Name Matching

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S3B_OL_1_EFR____20181211T093534_20181211T093710_20181212T133634_0096_019_307_1980_LN1_O_NT_002 |
| S3B_OL_1_EFR____20181211T093534_20181211T093710_20200115T181744_0096_019_307_1980_MR1_R_NT_002 |
- 211 GEE products that came from Svalbard Satellite Core Ground Station (SVL), which is not presented in DHUS;
- 300 (including 211 SVL) GEE products were from near-real-time (NR) dataset, whereas we took only non-time-critical from DHUS (NT);
- 218 GEE operational products (O), processed in 2019 by LN1, were reprocessed (R) in 2020 by MR1;
- 2 products mismatched by processing time
2.3. GEE Augmentation
2.3.1. Angles
2.3.2. Meteo
2.3.3. Solar Flux
3. Results and Discussion
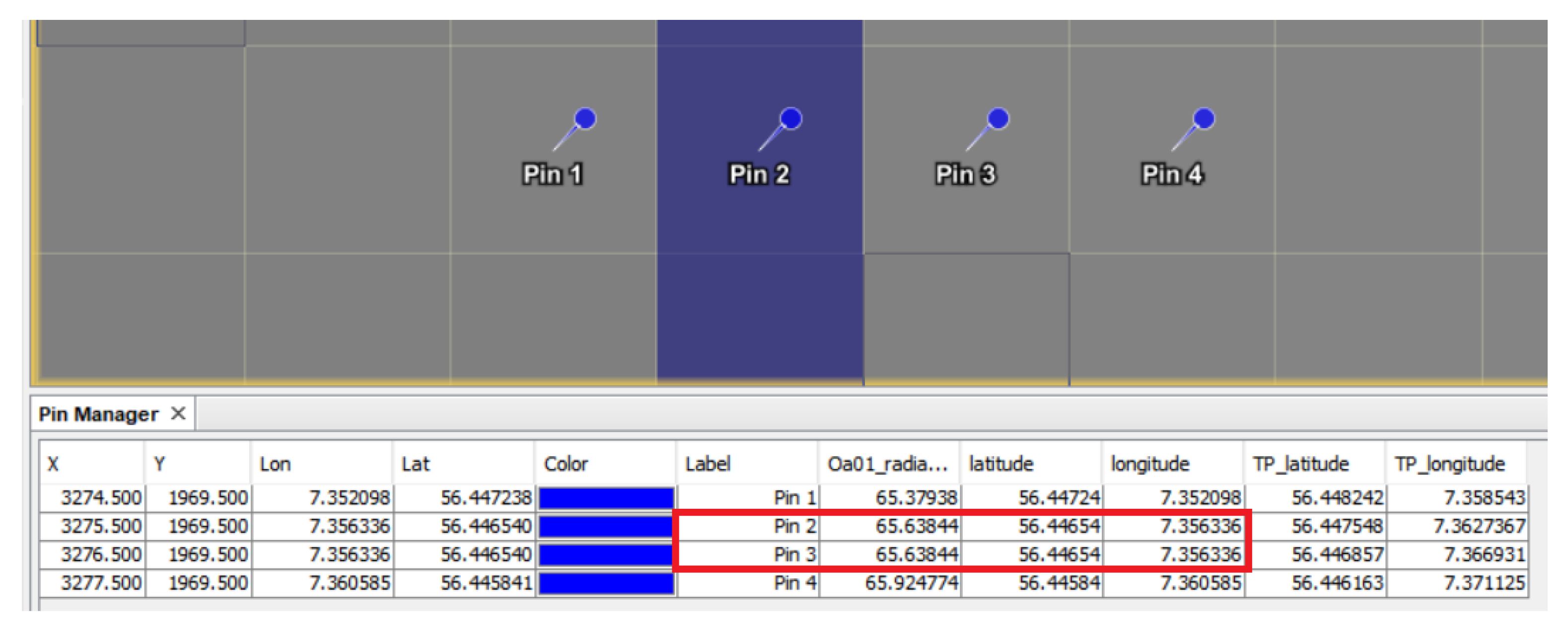
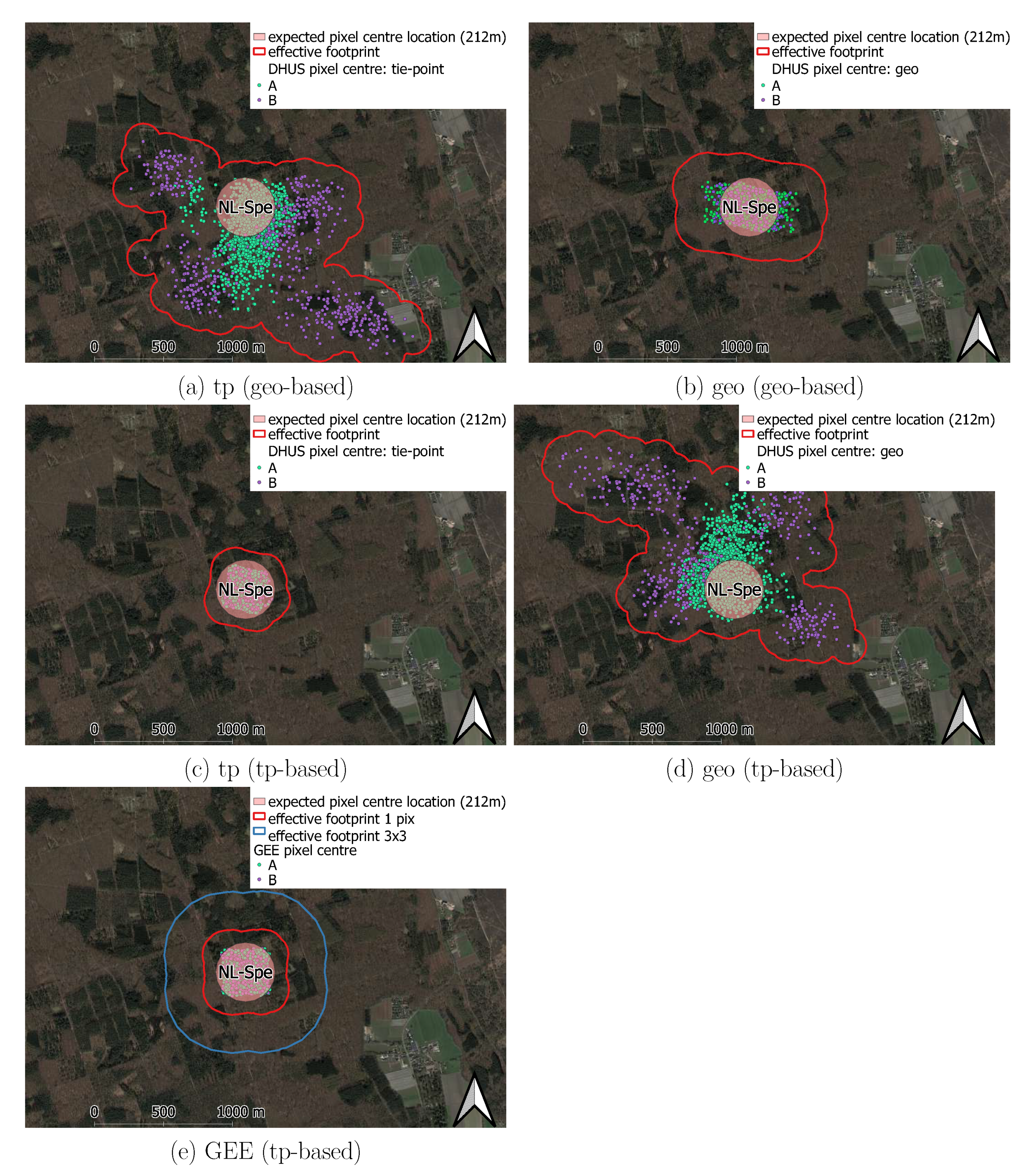
3.1. Pixel Positioning: Geo Versus Tie-Point
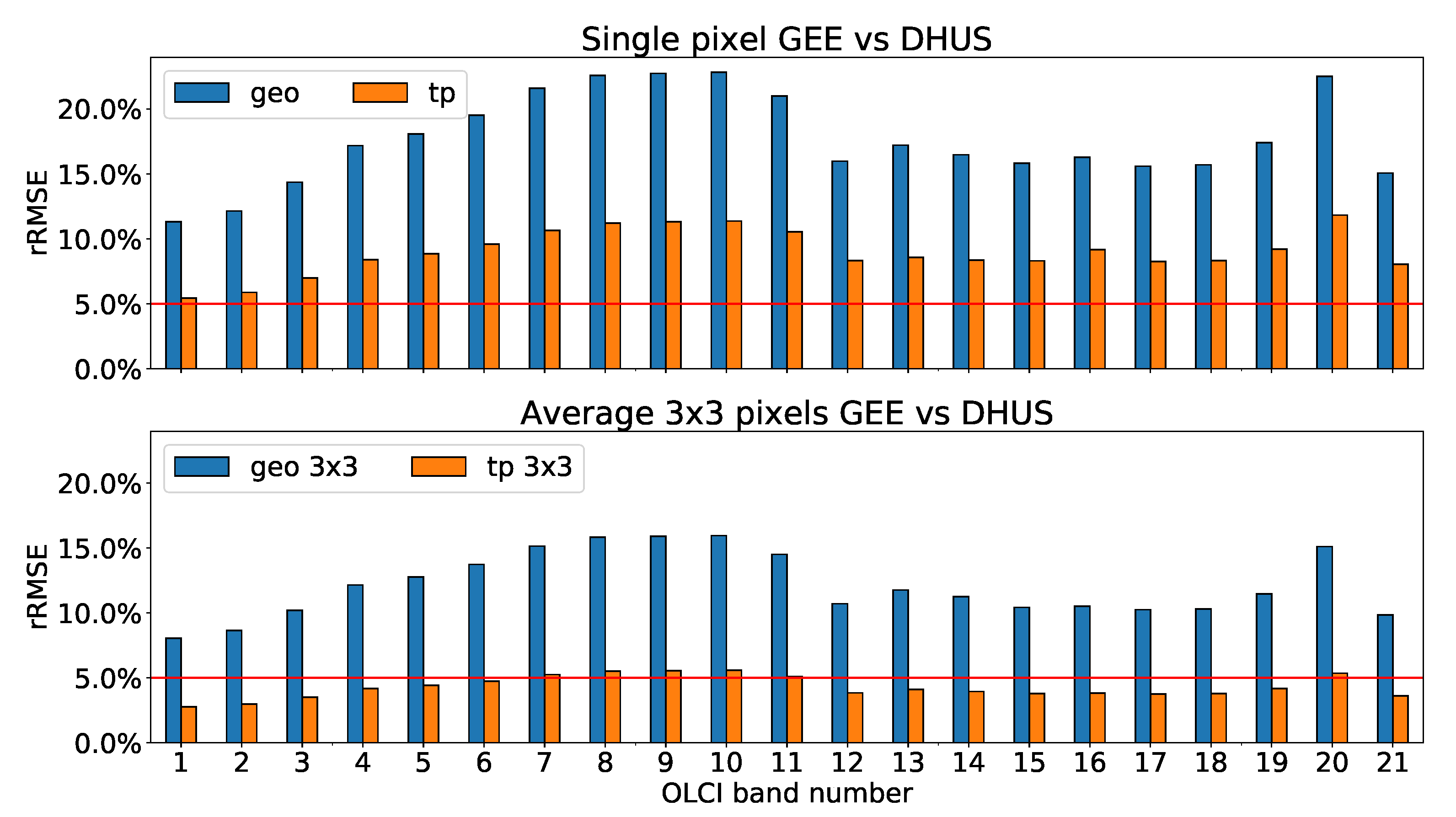
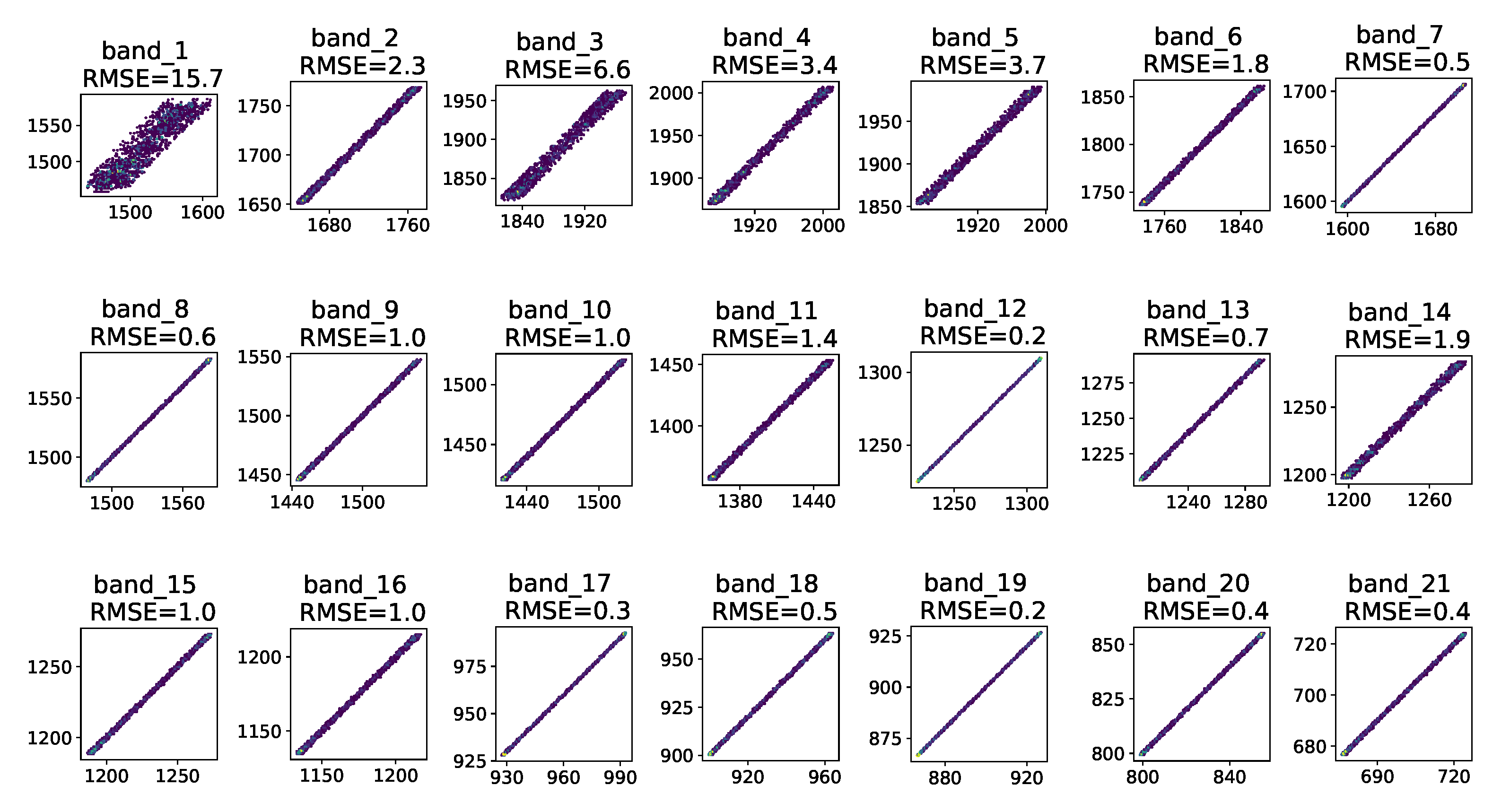
3.2. GEE versus DHUS: Radiance Difference
3.3. GEE Augmentation
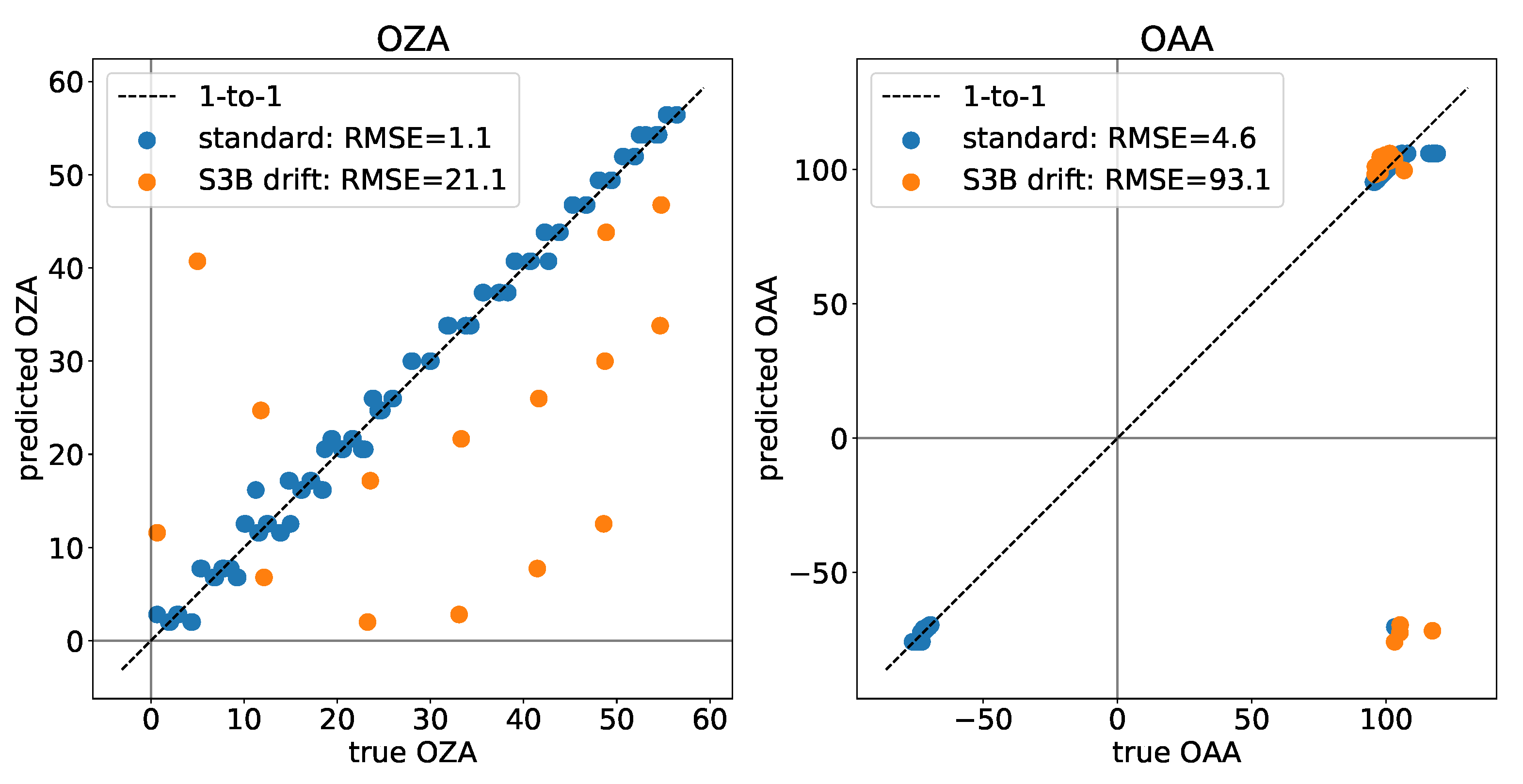
3.3.1. Angles
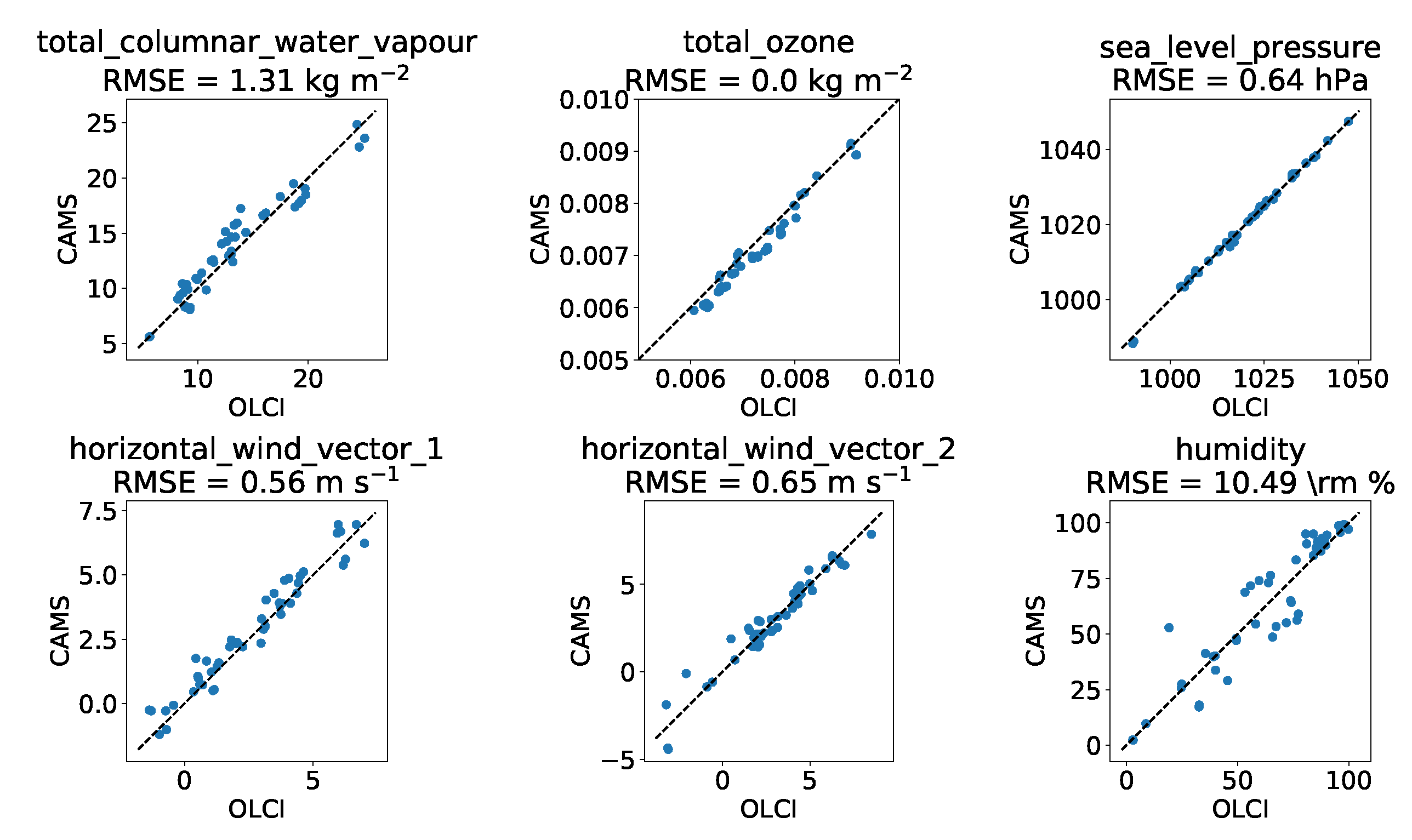
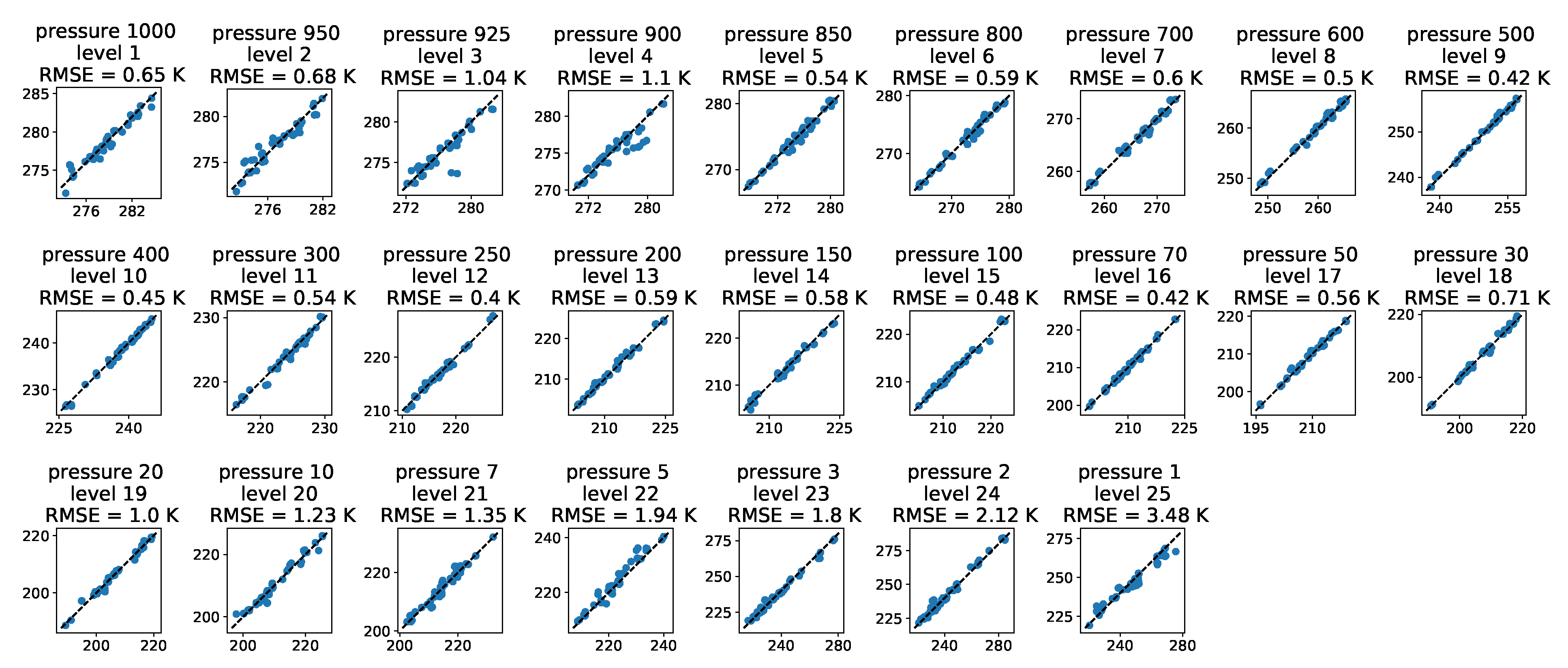
3.3.2. Meteorological Data
3.3.3. Solar Flux
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Sentinel-3 Products Availability
| Instrument | Product Type | Content | Resolution, m | Since | Structure | # Images | Offline | Size, MB |
|---|---|---|---|---|---|---|---|---|
| OLCI | OL_1_EFR | 21 bands | 300 | 2016-04-26 | frame | 2164 | 901 | 620 |
| OL_1_ERR | 21 bands | 1200 | 2016-04-26 | stripe | 2164 | 901 | 700 | |
| OL_2_LFR | 2 indices, 2 TOC red bands | 300 | 2016-04-26 | frame | 2164 | 957 | 120 | |
| OL_2_LRR | 2 indices, 2 TOC red bands | 1200 | 2016-04-26 | stripe | 2164 | 957 | 170 | |
| SLSTR | SL_1_RBT | 24 radiance/10 BT | 500/1000 | 2016-04-19 | frame | 4372 | 2715 | 430 |
| SL_2_LST | 2 indices, LST, masks | 1000 | 2016-04-19 | stripe | 4548 | 2842 | 60 | |
| SL_2_FRP | ? | ? | ? | ? | ||||
| Synergy | SY_2_SYN | 26 bands, AOT550 and exponent | 300 | 2018-10-08 | frame | 1146 | 3 | 400 |
| SY_2_VGP | 4 bands, atmosphere | 1000 | 2018-10-09 | stripe | 1133 | 2 | 50 | |
| SY_2_VG1 | 4 bands, NDVI, atmosphere | 1000 | 2018-10-04 | tile | 1374 | 3 | 120 | |
| SY_2_V10 | 4 bands, NDVI, atmosphere | 1000 | 2018-09-22 | tile | 136 | 0 | 250 | |
| SRAL | SR_1_SRA | ? | 300 × 1640 | 2016-03-01 | stripe | 696 | 3 | 52 |
| SR_1_SRA_A | ? | 300 × 1640 | 2016-04-07 | line | 351 | 99 | 2300 | |
| SR_1_SRA_BS | ? | 300 × 1640 | 2016-04-07 | line | 351 | 99 | 1700 | |
| SR_2_LAN | ? | 300 × 1640 | 2016-03-03 | stripe | 713 | 1 | 100 | |
| SR_2_WAT | ? | ? | ? | ? |
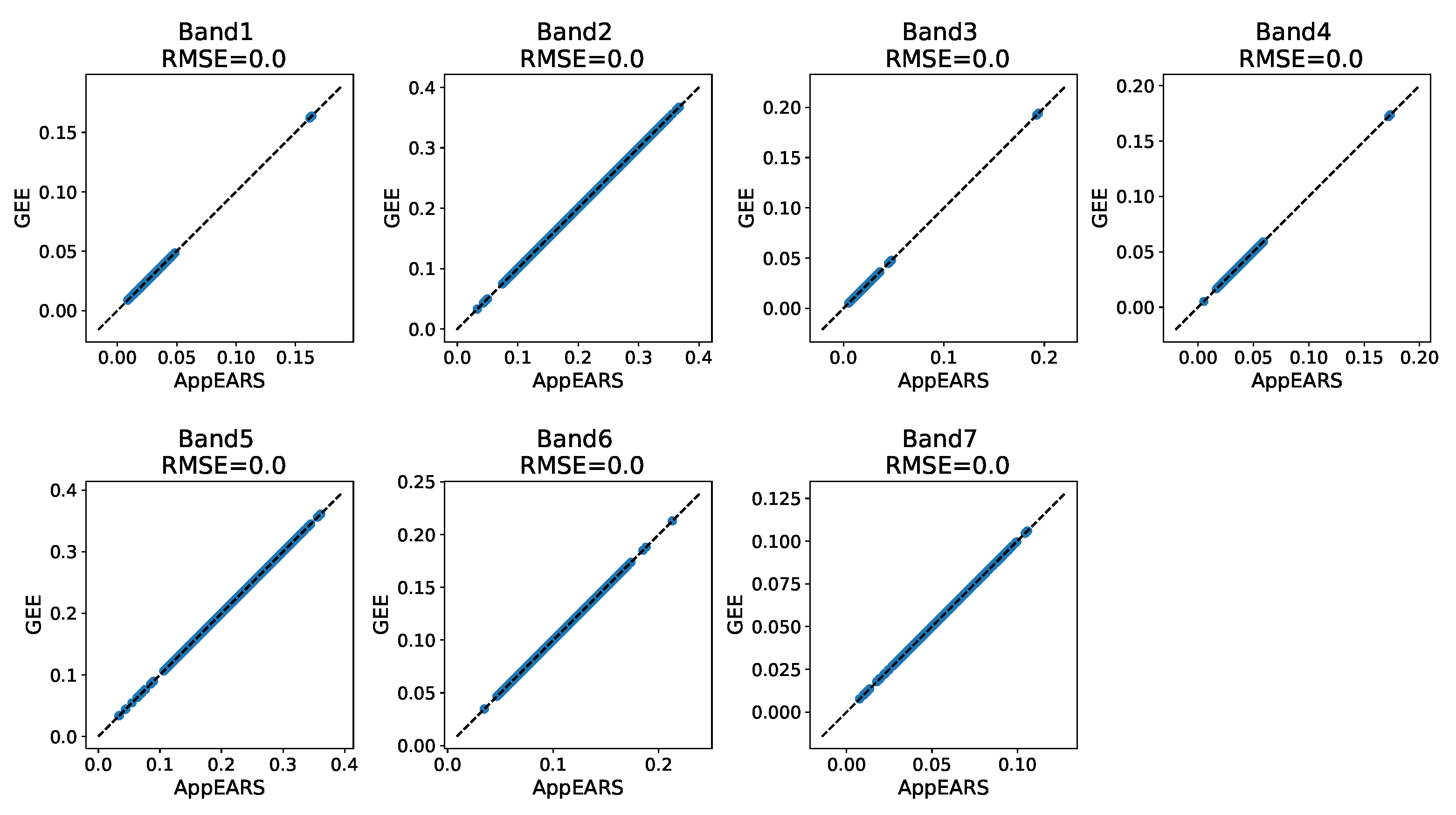
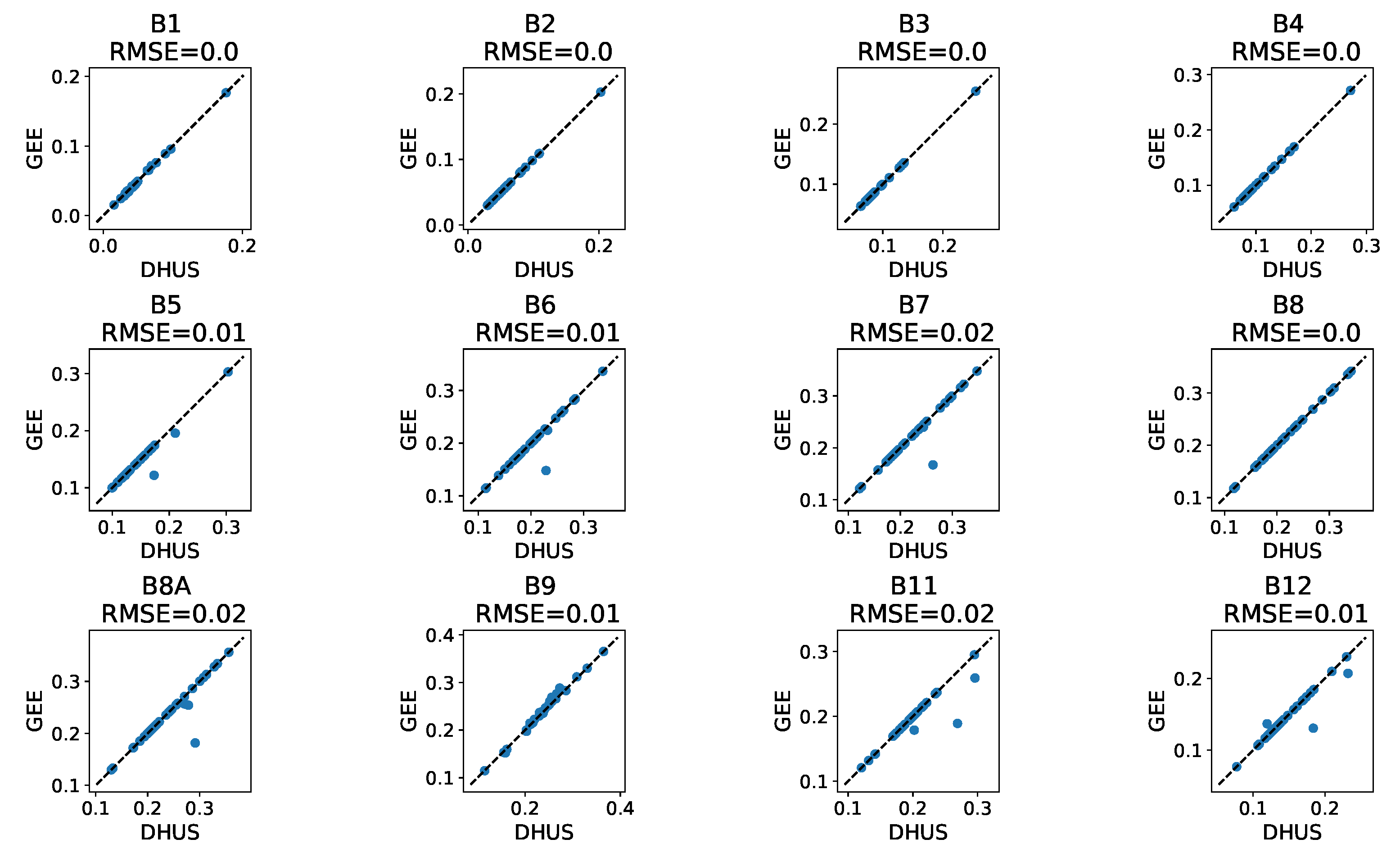
Appendix B. Performance of the Extraction Script on Other Google Earth Engine Datasets


References
- Copernicus. Open Access Hub, Long-Term Archive. Available online: https://scihub.copernicus.eu/userguide/LongTermArchive (accessed on 3 March 2021).
- ESA. Data and Information Access Services|Copernicus. Available online: https://www.copernicus.eu/en/access-data/dias (accessed on 3 March 2021).
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Gomes, V.; Queiroz, G.; Ferreira, K. An Overview of Platforms for Big Earth Observation Data Management and Analysis. Remote Sens. 2020, 12, 1253. [Google Scholar] [CrossRef]
- Tamiminia, H.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.; Adeli, S.; Brisco, B. Google Earth Engine for geo-big data applications: A meta-analysis and systematic review. ISPRS J. Photogramm. Remote Sens. 2020, 164, 152–170. [Google Scholar] [CrossRef]
- Amani, M.; Ghorbanian, A.; Ahmadi, S.A.; Kakooei, M.; Moghimi, A.; Mirmazloumi, S.M.; Moghaddam, S.H.A.; Mahdavi, S.; Ghahremanloo, M.; Parsian, S.; et al. Google Earth Engine Cloud Computing Platform for Remote Sensing Big Data Applications: A Comprehensive Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5326–5350. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Verhoef, W.; Bach, H. Simulation of Sentinel-3 images by four-stream surface-atmosphere radiative transfer modeling in the optical and thermal domains. Remote Sens. Environ. 2012, 120, 197–207. [Google Scholar] [CrossRef]
- Verhoef, W.; van der Tol, C.; Middleton, E.M. Hyperspectral radiative transfer modeling to explore the combined retrieval of biophysical parameters and canopy fluorescence from FLEX—Sentinel-3 tandem mission multi-sensor data. Remote Sens. Environ. 2018, 204, 942–963. [Google Scholar] [CrossRef]
- Prikaziuk, E.; van der Tol, C. Global Sensitivity Analysis of the SCOPE Model in Sentinel-3 Bands: Thermal Domain Focus. Remote Sens. 2019, 11, 2424. [Google Scholar] [CrossRef]
- Yang, P.; Verhoef, W.; Prikaziuk, E.; van der Tol, C. Improved retrieval of land surface biophysical variables from time series of Sentinel-3 OLCI TOA spectral observations by considering the temporal autocorrelation of surface and atmospheric properties. Remote Sens. Environ. 2021, 256, 112328. [Google Scholar] [CrossRef]
- GEE. Google Earth Engine|Google Developers. Available online: https://developers.google.com/earth-engine/issues (accessed on 3 March 2021).
- Marcollinbobo. Sentinel 3 Angles Are Missing. Available online: https://groups.google.com/g/google-earth-engine-developers/c/cssvsuITy30/m/pXCj8KzoBQAJ?pli=1 (accessed on 3 March 2021).
- ESA. Explore MERIS—Earth Online. Available online: https://earth.esa.int/eogateway/instruments/meris (accessed on 3 March 2021).
- Bezy, J.L.; Delwart, S.; Rast, M. MERIS—A new generation of ocean-colour sensor onboard Envisat. In Esa Bulletin; European Space Agency: Paris, France, 2000; pp. 48–56. [Google Scholar]
- Copernicus. User Products Dissemination Concept-Sentinel-3—Missions-Sentinel. Available online: https://sentinels.copernicus.eu/web/sentinel/missions/sentinel-3/data-products/user-dissemination-concept (accessed on 3 March 2021).
- Cornara, S.; Pirondini, F.; Palmade, J. Sentinel-3 coverage-driven mission design: Coupling of orbit selection and instrument design. Acta Astronaut. 2017, 140, 439–451. [Google Scholar] [CrossRef]
- Gomez-Chova, L.; Zurita-Milla, R.; Alonso, L.; Amoros-Lopez, J.; Guanter, L.; Camps-Valls, G. Gridding Artifacts on Medium-Resolution Satellite Image Time Series: MERIS Case Study. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2601–2611. [Google Scholar] [CrossRef]
- Copernicus. User Guides-Sentinel-2—Sentinel Online. Available online: https://sentinels.copernicus.eu/web/sentinel/user-guides/sentinel-3-slstr/coverage (accessed on 3 March 2021).
- Sentinel-3 Tandem for Climate. Available online: https://s3tandem.eu/ (accessed on 3 March 2021).
- Clerc, S.; Donlon, C.; Borde, F.; Lamquin, N.; Hunt, S.E.; Smith, D.; McMillan, M.; Mittaz, J.; Woolliams, E.; Hammond, M.; et al. Benefits and Lessons Learned from the Sentinel-3 Tandem Phase. Remote Sens. 2020, 12, 2668. [Google Scholar] [CrossRef]
- Jeganathan, C.; Dash, J.; Atkinson, P.M. Characterising the spatial pattern of phenology for the tropical vegetation of India using multi-temporal MERIS chlorophyll data. Landsc. Ecol. 2010, 25, 1125–1141. [Google Scholar] [CrossRef]
- Jeganathan, C.; Ganguly, S.; Dash, J.; Friedl, M.; Atkinson, P. Terrestrial vegetation phenology from MODIS and MERIS. In Proceedings of the IEEE International Symposium on Geoscience and Remote Sensing IGARSS, Honolulu, HI, USA, 25–30 July 2010; pp. 2699–2702. [Google Scholar] [CrossRef]
- Khwarahm, N.R.; Dash, J.; Skjoth, C.A.; Newnham, R.M.; Adams-Groom, B.; Head, K.; Caulton, E.; Atkinson, P.M. Mapping the birch and grass pollen seasons in the UK using satellite sensor time-series. Sci. Total Environ. 2017, 578, 586–600. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez-Galiano, V.F.; Dash, J.; Atkinson, P.M. Intercomparison of satellite sensor land surface phenology and ground phenology in Europe. Geophys. Res. Lett. 2015, 42, 2253–2260. [Google Scholar] [CrossRef]
- Atkinson, P.M.; Jeganathan, C.; Dash, J.; Atzberger, C. Inter-comparison of four models for smoothing satellite sensor time-series data to estimate vegetation phenology. Remote Sens. Environ. 2012, 123, 400–417. [Google Scholar] [CrossRef]
- O’Connor, B.A.; Dwyer, N.; Cawkwell, F. Satellite remote sensing as a tool for monitoring vegetation seasonality. In Remote Sensing for Agriculture, Ecosystems, and Hydrology X; Neale, C.M.U., Owe, M., D’Urso, G., Eds.; Proceedings of SPIE; SPIE Europe: Cardiff, UK; Bellingham, WA, USA, 2008; Volume 7104, p. 71040A. [Google Scholar] [CrossRef]
- O’Connor, B.; Dwyer, E.; Cawkwell, F.; Eklundh, L. Spatio-temporal patterns in vegetation start of season across the island of Ireland using the MERIS Global Vegetation Index. ISPRS J. Photogramm. Remote Sens. 2012, 68, 79–94. [Google Scholar] [CrossRef]
- Gobron, N.; Pinty, B.; Mélin, F.; Taberner, M.; Verstraete, M.M.; Robustelli, M.; Widlowski, J.L. Evaluation of the MERIS/ENVISAT FAPAR product. Adv. Space Res. 2007, 39, 105–115. [Google Scholar] [CrossRef]
- Gobron, N.; Pinty, B.; Aussedat, O.; Taberner, M.; Faber, O.; Melin, F.; Lavergne, T.; Robustelli, M.; Snoeij, P. Uncertainty estimates for the FAPAR operational products derived from MERIS—Impact of top-of-atmosphere radiance uncertainties and validation with field data. Remote Sens. Environ. 2008, 112, 1871–1883. [Google Scholar] [CrossRef]
- Michaud, J.S.; Coops, N.C.; Andrew, M.E.; Wulder, M.A. Characterising spatiotemporal environmental and natural variation using a dynamic habitat index throughout the province of Ontario. Ecol. Indic. 2012, 18, 303–311. [Google Scholar] [CrossRef]
- Canisius, F.; Fernandes, R.; Chen, J. Comparison and evaluation of Medium Resolution Imaging Spectrometer leaf area index products across a range of land use. Remote Sens. Environ. 2010, 114, 950–960. [Google Scholar] [CrossRef]
- Tum, M.; Günther, K.; Böttcher, M.; Baret, F.; Bittner, M.; Brockmann, C.; Weiss, M. Global Gap-Free MERIS LAI Time Series (2002–2012). Remote Sens. 2016, 8, 69. [Google Scholar] [CrossRef]
- Si, Y.; Schlerf, M.; Zurita-Milla, R.; Skidmore, A.; Wang, T. Mapping spatio-temporal variation of grassland quantity and quality using MERIS data and the PROSAIL model. Remote Sens. Environ. 2012, 121, 415–425. [Google Scholar] [CrossRef]
- Croft, H.; Chen, J.M.; Wang, R.; Mo, G.; Luo, S.; Luo, X.; He, L.; Gonsamo, A.; Arabian, J.; Zhang, Y.; et al. The global distribution of leaf chlorophyll content. Remote Sens. Environ. 2020, 236. [Google Scholar] [CrossRef]
- Galionis, D.; Charou, E.; Stefouli, M.; Kabassi, K.; Martinis, A. Mapping Burnt Forest Areas and Monitoring their Regeneration Using MERIS Images. Procedia Technol. 2013, 8, 245–254. [Google Scholar] [CrossRef][Green Version]
- Huesca, M.; Merino de Miguel, S.; González-Alonso, F. An intercomparison of Satellite Burned Area Maps derived from MODIS, MERIS, SPOT-VEGETATION, and ATSR images. An application to the August 2006 Galicia (Spain) forest fires. For. Syst. 2013, 22, 222. [Google Scholar] [CrossRef]
- Alonso-Canas, I.; Chuvieco, E. Global burned area mapping from ENVISAT-MERIS and MODIS active fire data. Remote Sens. Environ. 2015, 163, 140–152. [Google Scholar] [CrossRef]
- Zurita-Milla, R.; Gomez-Chova, L.; Guanter, L.; Clevers, J.G.P.W.; Camps-Valls, G. Multitemporal Unmixing of Medium-Spatial-Resolution Satellite Images: A Case Study Using MERIS Images for Land-Cover Mapping. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4308–4317. [Google Scholar] [CrossRef]
- Pastor-Guzman, J.; Brown, L.; Morris, H.; Bourg, L.; Goryl, P.; Dransfeld, S.; Dash, J. The Sentinel-3 OLCI Terrestrial Chlorophyll Index (OTCI): Algorithm Improvements, Spatiotemporal Consistency and Continuity with the MERIS Archive. Remote Sens. 2020, 12, 2652. [Google Scholar] [CrossRef]
- Nolde, M.; Plank, S.; Riedlinger, T. An Adaptive and Extensible System for Satellite-Based, Large Scale Burnt Area Monitoring in Near-Real Time. Remote Sens. 2020, 12, 2162. [Google Scholar] [CrossRef]
- De Grave, C.; Verrelst, J.; Morcillo-Pallarés, P.; Pipia, L.; Rivera-Caicedo, J.P.; Amin, E.; Belda, S.; Moreno, J. Quantifying vegetation biophysical variables from the Sentinel-3/FLEX tandem mission: Evaluation of the synergy of OLCI and FLORIS data sources. Remote Sens. Environ. 2020, 251, 112101. [Google Scholar] [CrossRef]
- Banks, A.C.; Hunt, S.E.; Gorroño, J.; Scanlon, T.; Woolliams, E.R.; Fox, N.P. A comparison of validation and vicarious calibration of high and medium resolution satellite-borne sensors using RadCalNet. In Sensors, Systems, and Next-Generation Satellites XXI; Meynart, R., Neeck, S.P., Shimoda, H., Kimura, T., Bézy, J.L., Eds.; Proceedings of SPIE; SPIE Europe: Bellingham, WA, USA, 2017; Volume 10423, p. 44, Proceedings of SPIE. [Google Scholar] [CrossRef]
- Qian, X.; Liu, L. Retrieving Crop Leaf Chlorophyll Content Using an Improved Look-Up-Table Approach by Combining Multiple Canopy Structures and Soil Backgrounds. Remote Sens. 2020, 12, 2139. [Google Scholar] [CrossRef]
- Vuolo, F.; Dash, J.; Curran, P.J.; Lajas, D.; Kwiatkowska, E. Methodologies and Uncertainties in the Use of the Terrestrial Chlorophyll Index for the Sentinel-3 Mission. Remote Sens. 2012, 4, 1112–1133. [Google Scholar] [CrossRef]
- Clevers, J.; Gitelson, A.A. Remote estimation of crop and grass chlorophyll and nitrogen content using red-edge bands on Sentinel-2 and -3. Int. J. Appl. Earth Obs. Geoinf. 2013, 23, 344–351. [Google Scholar] [CrossRef]
- Loozen, Y.; Karssenberg, D.; de Jong, S.M.; Wang, S.; van Dijk, J.; Wassen, M.J.; Rebel, K.T. Exploring the use of vegetation indices to sense canopy nitrogen to phosphorous ratio in grasses. Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 1–14. [Google Scholar] [CrossRef]
- Kira, O.; Nguy-Robertson, A.L.; Arkebauer, T.J.; Linker, R.; Gitelson, A.A. Toward Generic Models for Green LAI Estimation in Maize and Soybean: Satellite Observations. Remote Sens. 2017, 9, 318. [Google Scholar] [CrossRef]
- Wang, Q.; Atkinson, P.M. Spatio-temporal fusion for daily Sentinel-2 images. Remote Sens. Environ. 2018, 204, 31–42. [Google Scholar] [CrossRef]
- Drusch, M.; Moreno, J.; Bello, U.D.; Franco, R.; Goulas, Y.; Huth, A.; Kraft, S.; Middleton, E.M.; Miglietta, F.; Mohammed, G.; et al. The FLuorescence EXplorer Mission Concept—ESA’s Earth Explorer 8. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1273–1284. [Google Scholar] [CrossRef]
- Vicent, J.; Sabater, N.; Tenjo, C.; Acarreta, J.R.; Manzano, M.; Rivera, J.P.; Jurado, P.; Franco, R.; Alonso, L.; Verrelst, J.; et al. FLEX end-to-end mission performance simulator. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4215–4223. [Google Scholar] [CrossRef]
- Brown, L.A.; Dash, J.; Ogutu, B.O.; Richardson, A.D. On the relationship between continuous measures of canopy greenness derived using near-surface remote sensing and satellite-derived vegetation products. Agric. For. Meteorol. 2017, 247, 280–292. [Google Scholar] [CrossRef]
- GEE. Sentinel-3 OLCI EFR: Ocean and Land Color Instrument Earth Observation Full Resolution. Available online: https://developers.google.com/earth-engine/datasets/catalog/COPERNICUS_S3_OLCI#image-properties (accessed on 3 March 2021).
- Copernicus. Open Access Hub. Available online: https://scihub.copernicus.eu/dhus/#/home (accessed on 3 March 2021).
- NASA. LAADS DAAC. Available online: https://ladsweb.modaps.eosdis.nasa.gov/archive/allData/450/ (accessed on 3 March 2021).
- ESA-STEP. SNAP|STEP. Available online: http://step.esa.int/main/toolboxes/snap/ (accessed on 3 March 2021).
- QGIS Development Team. QGIS Geographic Information System; Open Source Geospatial Foundation: Chicago, IL, USA, 2009. [Google Scholar]
- ECMWF. ECMWF|CAMS Near-Real-Time. Available online: https://apps.ecmwf.int/datasets/data/cams-nrealtime/levtype=sfc/ (accessed on 3 March 2021).
- Lesne, O.; Manager, Q.A. Product Data Format Specification-SLSTR Level 1 Products. 2018. Available online: https://sentinel.esa.int/documents/247904/0/Sentinel-3-SLSTR-Product-Data-Format-Specification-Level-1/26cb7851-22fa-44c1-b22b-428a8eb5e6c3 (accessed on 12 March 2021).
- EUROSTAT. Farms and Farmland in the European Union—Statistics. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Farms_and_farmland_in_the_European_Union_-_statistics#The_evolution_of_farms_and_farmland_from_2005_to_2016 (accessed on 3 March 2021).
- Lamquin, N.; Clerc, S.; Bourg, L.; Donlon, C. OLCI A/B Tandem Phase Analysis, Part 1: Level 1 Homogenisation and Harmonisation. Remote Sens. 2020, 12, 1804. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- GEE. Sentinel-2 MSI: MultiSpectral Instrument, Level-2A. Available online: https://developers.google.com/earth-engine/datasets/catalog/COPERNICUS_S2_SR (accessed on 3 March 2021).
- Schaaf, C.; Wang, Z. MCD43A1 MODIS/Terra+Aqua BRDF/Albedo Model Parameters Daily L3 Global—500 m V006. NASA EOSDIS Land Processes DAAC; NASA: Washington, DC, USA, 2015. [CrossRef]
- GEE. MCD43A4.006 MODIS Nadir BRDF-Adjusted Reflectance Daily 500 m. Available online: https://developers.google.com/earth-engine/datasets/catalog/MODIS_006_MCD43A4 (accessed on 3 March 2021).
- AppEEARS Team. Application for Extracting and Exploring Analysis Ready Samples (AppEEARS). Ver. 2.48. Available online: https://lpdaacsvc.cr.usgs.gov/appeears (accessed on 11 November 2020).
- GEE. Resampling and Reducing Resolution|Google Earth Engine. Available online: https://developers.google.com/earth-engine/resample (accessed on 3 March 2021).









| DHUS | Filter | GEE | ||
|---|---|---|---|---|
| Left | Dropped | Left | Dropped | |
| 2002 | products | 6795 | ||
| 1987 | 15 | loaded/CRS present | 2221 | 4574 |
| 1908 | 79 | extracted/CRS valid | 2045 | 176 |
| 1146 | 762 | matched by full name | 1146 | 899 |
| 1887 | 21 | matched by short name | 1887 | 158 |
| Orbit Number | Counts Full Name | Counts Short Name |
|---|---|---|
| 8 | 77 | 15 |
| 22 | 81 | 15 |
| 36 | 80 | 15 |
| 51 | 53 | 15 |
| 65 | 78 | 15 |
| 79 | 79 | 16 |
| 93 | 77 | 14 |
| 108 | 81 | 16 |
| 122 | 79 | 16 |
| 136 | 80 | 16 |
| 165 | 78 | 17 |
| 179 | 76 | 15 |
| 193 | 77 | 15 |
| 222 | 79 | 14 |
| 236 | 78 | 15 |
| 250 | 79 | 15 |
| 279 | 78 | 15 |
| 293 | 77 | 15 |
| 307 | 79 | 15 |
| 336 | 78 | 17 |
| 350 | 77 | 15 |
| 364 | 77 | 15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prikaziuk, E.; Yang, P.; van der Tol, C. Google Earth Engine Sentinel-3 OLCI Level-1 Dataset Deviates from the Original Data: Causes and Consequences. Remote Sens. 2021, 13, 1098. https://doi.org/10.3390/rs13061098
Prikaziuk E, Yang P, van der Tol C. Google Earth Engine Sentinel-3 OLCI Level-1 Dataset Deviates from the Original Data: Causes and Consequences. Remote Sensing. 2021; 13(6):1098. https://doi.org/10.3390/rs13061098
Chicago/Turabian StylePrikaziuk, Egor, Peiqi Yang, and Christiaan van der Tol. 2021. "Google Earth Engine Sentinel-3 OLCI Level-1 Dataset Deviates from the Original Data: Causes and Consequences" Remote Sensing 13, no. 6: 1098. https://doi.org/10.3390/rs13061098
APA StylePrikaziuk, E., Yang, P., & van der Tol, C. (2021). Google Earth Engine Sentinel-3 OLCI Level-1 Dataset Deviates from the Original Data: Causes and Consequences. Remote Sensing, 13(6), 1098. https://doi.org/10.3390/rs13061098