
Continuity Enhancement Method for Real-Time PPP Based on Zero-Baseline Constraint of Multi-Receiver



Abstract
1. Introduction
2. Methodology
2.1. BSSD Ambiguity-Float PPP Model
2.2. Zero Baseline Constraint Conditions
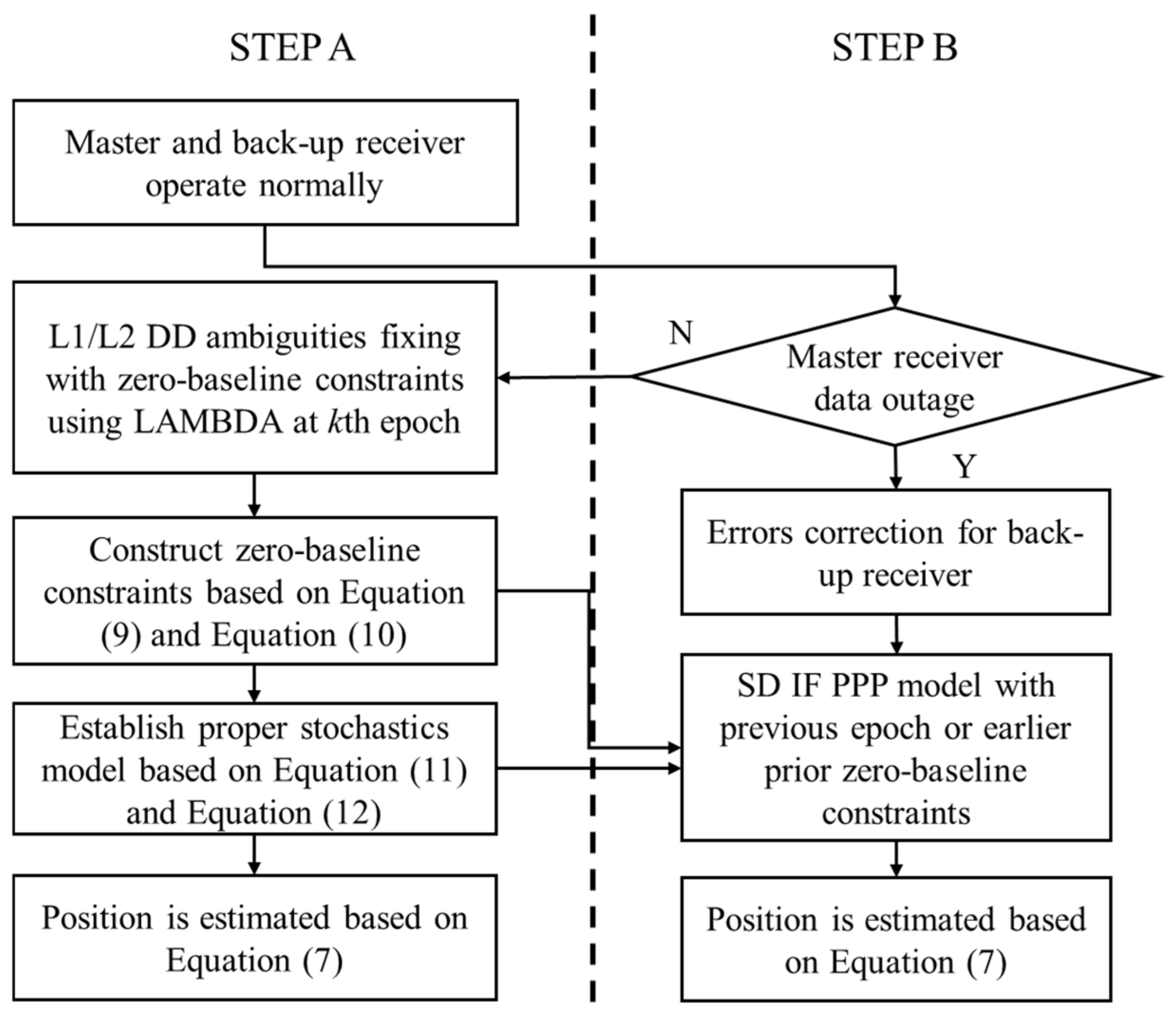
2.3. Instantaneous Initialization with Zero-Baseline Constraint of the Back-Up Receiver
3. Experiment and Discussion
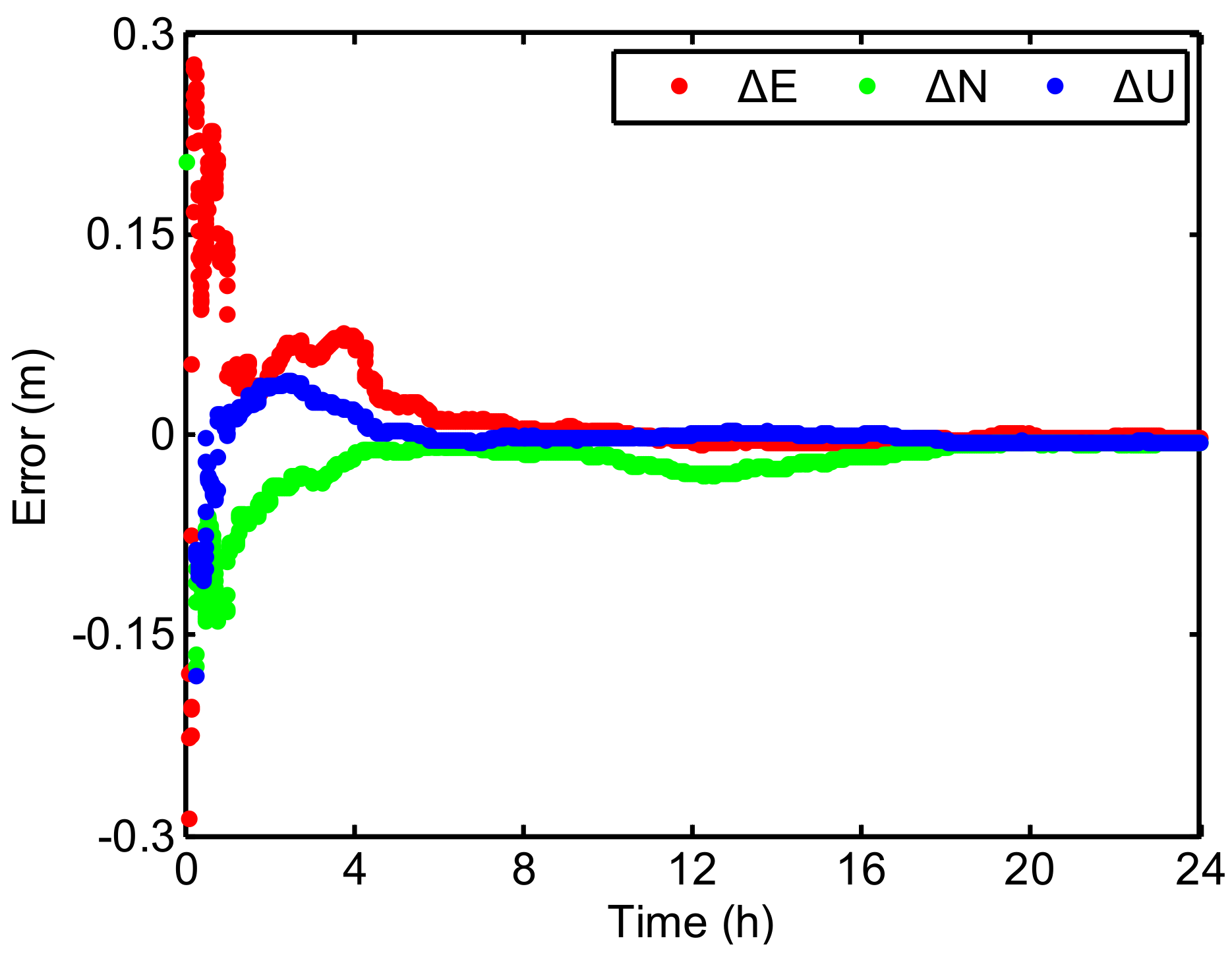
3.1. Static Experiment
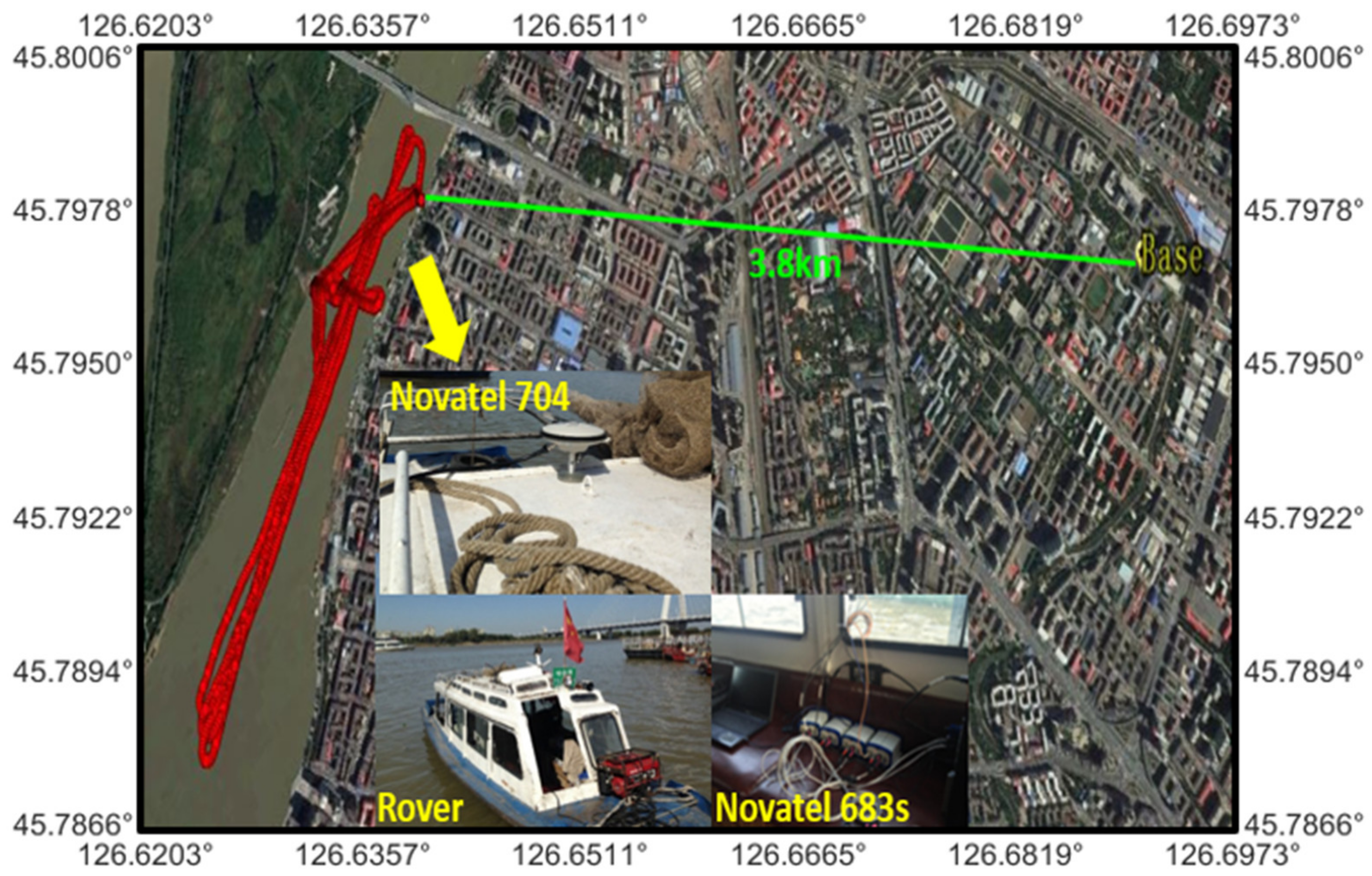
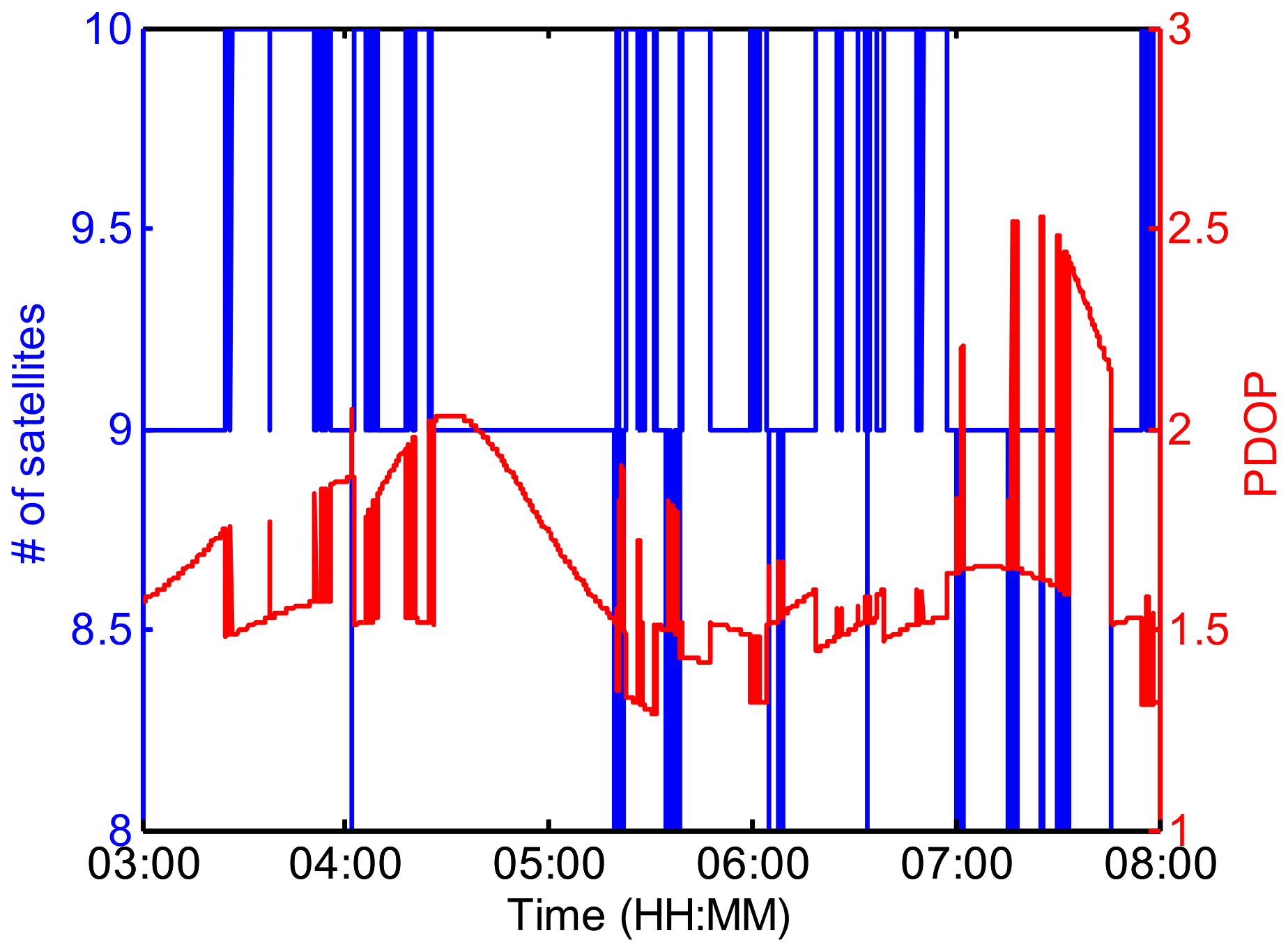
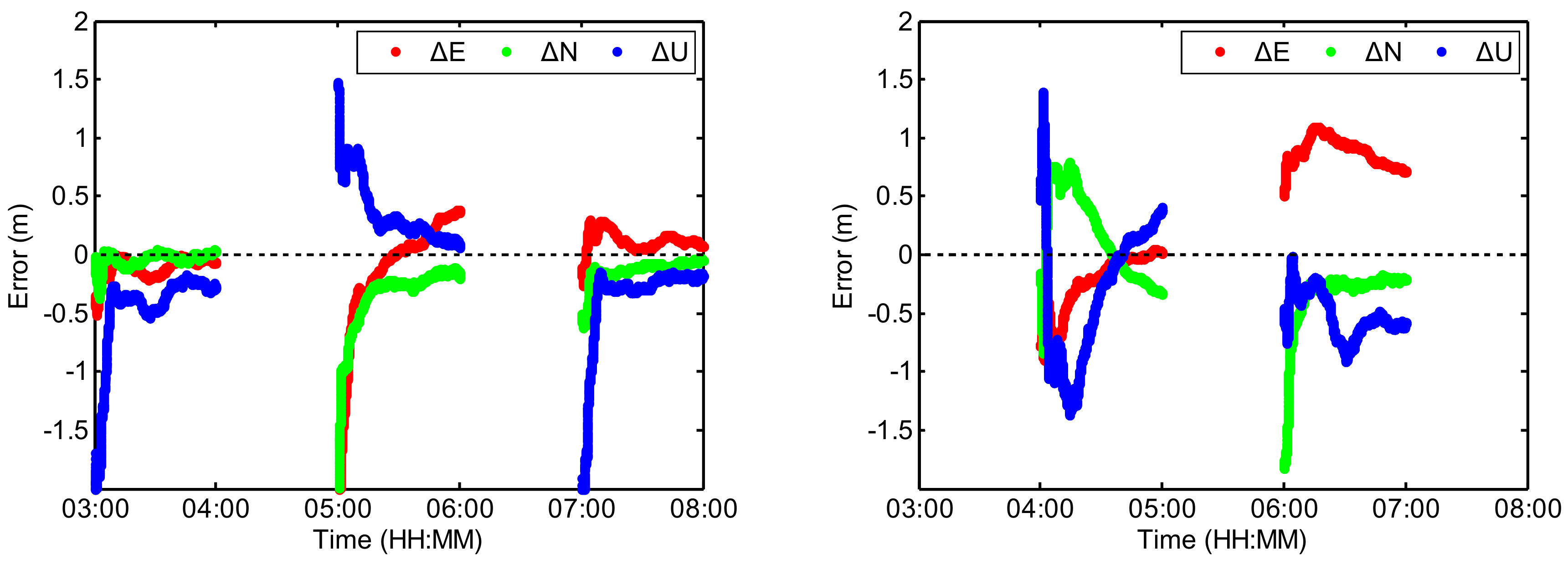
3.2. Kinematic Experiment
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, F.; Zhao, L.; Li, L.; Feng, S.; Cheng, J. Performance evaluation of kinematic BDS/GNSS real-time precise point po-sitioning for maritime positioning. J. Navig. 2019, 72, 34–52. [Google Scholar] [CrossRef]
- Nie, Z.; Liu, F.; Gao, Y. Real-time precise point positioning with a low-cost dual-frequency GNSS device. GPS Solut. 2020, 24, 9. [Google Scholar] [CrossRef]
- Tu, R.; Ge, M.; Zhang, H.; Huang, G. The realization and convergence analysis of combined PPP based on raw observation. Adv. Space Res. 2013, 52, 211–221. [Google Scholar] [CrossRef]
- Lou, Y.; Zheng, F.; Gu, S.; Wang, C.; Guo, H.; Feng, Y. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. GPS Solut. 2015, 20, 849–862. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time pre-cise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X. Integrating GPS and GLONASS to accelerate convergence and initialization times of precise point posi-tioning. GPS Solut. 2014, 18, 461–471. [Google Scholar] [CrossRef]
- Chen, X.M.; Allison, T.; Cao, W.; Ferguson, K.; Grünig, S.; Gomez, V.; Kipka, A.; Köhler, J.; Landau, H.; Leandro, R. Trimble RTX, an innovative new approach for network RTK. In Proceedings of the ION-GNSS-2011, Portland, OR, USA, 20–23 September 2011; pp. 2214–2219. [Google Scholar]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Aggrey, J.; Bisnath, S. Improving GNSS PPP Convergence: The Case of Atmospheric-Constrained, Multi-GNSS PPP-AR. Sensors 2019, 19, 587. [Google Scholar] [CrossRef] [PubMed]
- El-Mowafy, A.; Deo, M.; Kubo, N. Maintaining real-time precise point positioning during outages of orbit and clock corrections. GPS Solut. 2017, 21, 937–947. [Google Scholar] [CrossRef]
- Nie, Z.; Gao, Y.; Wang, Z.; Ji, S.; Yang, H.; Nie, Z. An approach to GPS clock prediction for real-time PPP during outages of RTS stream. GPS Solut. 2017, 22, 14. [Google Scholar] [CrossRef]
- Yang, F.; Zhao, L.; Li, L.; Cheng, J.; Zhang, J. Ionosphere-Constrained Triple-Frequency Cycle Slip Fixing Method for the Rapid Re-Initialization of PPP. Sensors 2018, 19, 117. [Google Scholar] [CrossRef]
- Luo, X.; Gu, F.; Lou, Y.; Chen, B.; Song, W. Better thresholds and weights to improve GNSS PPP under ionospheric scin-tillation activity at low latitudes. GPS Solut. 2020, 24, 17. [Google Scholar] [CrossRef]
- Xiao, G.; Mayer, M.; Heck, B.; Sui, L.; Zeng, T.; Zhao, D. Improved time-differenced cycle slip detect and repair for GNSS undifferenced observations. GPS Solut. 2018, 22, 6. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X. Instantaneous re-initialization in real-time kinematic PPP with cycle slip fixing. GPS Solut. 2012, 16, 315–327. [Google Scholar]
- Jacek, P. Precise GNSS single epoch positioning with multiple receiver configuration for medium-length baselines: Methodology and performance analysis. Meas. Sci. Technol. 2015, 26, 035002. [Google Scholar]
- Song, C.; Hao, J. Instantaneous Re-convergence of Kinematic PPP by the Use of Relationship Between Multiple Receiver Ambiguity. Wuhan Daxue Xuebao 2017, 42, 595–599, 690. [Google Scholar]
- Liu, Y.; Liu, F.; Gao, Y.; Zhao, L. Implementation and Analysis of Tightly Coupled Global Navigation Satellite System Precise Point Positioning/Inertial Navigation System (GNSS PPP/INS) with Insufficient Satellites for Land Vehicle Naviga-tion. Sensors 2018, 18, 4305. [Google Scholar] [CrossRef]
- Song, C.; Hao, J.; Zhang, H. A Method to Accelerate PPP Re-Convergence with Prior Troposphere Delay Constraint. J. Geom. Sci. Technol. 2015, 32, 441–444. [Google Scholar]
- Yao, Y.; Yu, C.; Hu, Y. A New Method to Accelerate PPP Convergence Time by using a Global Zenith Troposphere Delay Estimate Model. J. Navig. 2014, 67, 899–910. [Google Scholar] [CrossRef]
- Tu, R.; Zhang, R.; Zhang, P.F.; Liu, J.; Lu, X. An approach for real-time fast point positioning of the BeiDou Navigation Satellite System using augmentation information. Meas. Sci. Technol. 2018, 29, 075003. [Google Scholar] [CrossRef]
- Remondi, B.W. Global positioning system carrier phase: Description and use. J. Geod. 1985, 59, 361–377. [Google Scholar] [CrossRef]
- Kouba, J. A Guide to Using International GNSS Service (IGS) Products. 2019. Available online: https://igscb.jpl.nasa.gov/igscb/resource/pubs/UsingIGSProductsVer21.pdf (accessed on 15 July 2017).
- Petit, G.; Luzum, B. IERS—IERS Conventions (2010); IERS Technical Note No. 36; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010; ISBN 3-89888-989-6. [Google Scholar]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Space Phys. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X.; Wang, J.; Ren, X. Modeling and assessment of triple-frequency BDS precise point positioning. J. Geod. 2016, 90, 1223–1235. [Google Scholar] [CrossRef]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, 07304. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Tang, X.; Roberts, G.W.; Hancock, C.M.; Yu, J. GPS/BDS relative positioning assessment by zero baseline observation. Measurement 2018, 116, 464–472. [Google Scholar] [CrossRef]
- Ding, W.; Tan, B.; Chen, Y.; Teferle, F.N.; Yuan, Y. Evaluation of a regional real-time precise positioning system based on GPS/BeiDou observations in Australia. Adv. Space Res. 2018, 61, 951–961. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | E (m) | N (m) | U (m) | Continuity |
|---|---|---|---|---|
| Master receiver | 0.26 | 0.222 | 0.413 | 60% |
| Back-up receiver | 0.377 | 0.268 | 0.419 | 40% |
| Multi-receivers | 0.182 | 0.101 | 0.235 | 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, F.; Zheng, C.; Li, H.; Li, L.; Zhang, J.; Zhao, L. Continuity Enhancement Method for Real-Time PPP Based on Zero-Baseline Constraint of Multi-Receiver. Remote Sens. 2021, 13, 605. https://doi.org/10.3390/rs13040605
Yang F, Zheng C, Li H, Li L, Zhang J, Zhao L. Continuity Enhancement Method for Real-Time PPP Based on Zero-Baseline Constraint of Multi-Receiver. Remote Sensing. 2021; 13(4):605. https://doi.org/10.3390/rs13040605
Chicago/Turabian StyleYang, Fuxin, Chuanlei Zheng, Hui Li, Liang Li, Jie Zhang, and Lin Zhao. 2021. "Continuity Enhancement Method for Real-Time PPP Based on Zero-Baseline Constraint of Multi-Receiver" Remote Sensing 13, no. 4: 605. https://doi.org/10.3390/rs13040605
APA StyleYang, F., Zheng, C., Li, H., Li, L., Zhang, J., & Zhao, L. (2021). Continuity Enhancement Method for Real-Time PPP Based on Zero-Baseline Constraint of Multi-Receiver. Remote Sensing, 13(4), 605. https://doi.org/10.3390/rs13040605