1. Introduction
1.1. Background and Objectives of the Study
Windstorm damages have become more common in the past decades [
1,
2]. Windstorms cause noticeable large area forest damages in Europe, including Scandinavia and Finland. For example, in southern Sweden, approximately 4.5 million cubic meters of timber was damaged in 1999 in a single storm [
3], and in 2005 and 2007 approximately 70 and 12 million cubic meters of timber fell down in similar disastrous events, respectively [
4]. The forest area reported to have been cut due to damages was over 30,000 ha on more than 20,000 forest stands in Northern Finland in 2014, and more than 6000 ha in Eastern Finland in July 2020.
A rapid localization of the forest damages and removal of the fallen trees is the key for not only assessing the losses, but also avoiding further damage, caused, e.g., by insects. Severe storms require earlier sanitary cuttings (compared to original forest plans) to prevent such insect outbreaks. These ad-hoc cuttings naturally increase harvesting and removal costs, cause losses in revenue and lower the future cutting possibilities [
5]. The volume of damaged trees in windstorm has exceeded the volume of the normal annual cut in some countries in Europe, e.g., Germany, Poland and Sweden [
1,
6]. Timely detection and mapping of a damaged forest allows additionally to optimize efforts in clearing potentially blocked roads and damaged power-lines in rural areas.
A common method to localize the damage areas for operational forest regime purposes and obtain a rough overview of the damages has been monitoring with airplane using either visual assessment or optical sensors, e.g., video camera or airborne laser scanner (ALS). Most large-area studies with space-borne data have been conducted using optical satellite instruments [
7]. A recent study by Rüetschi et al. [
8] presents a summary of several demonstrated approaches in mapping windthrown forest areas. Our further in-depth analysis with SAR data is given in
Section 1.2.
A key prerequisite for successful operational forest management after a storm is a rapid, near-real-time localization of the damages. Damages are often large in area wherefore methods using space-borne data are appealing and cost-efficient alternatives. A central requirement is the timely availability of the remotely sensed data. SAR data are the only possibility for rapid monitoring due to their independence of light conditions and cloud cover.
SAR backscatter depends on the forest structure and biomass, the environment and weather conditions such as moisture and temperature and sensor properties. From the current operative SAR satellites, EU Copernicus program’s two C-band Sentinel-1 satellites probably have the best potential for rapid monitoring, primarily due to a frequent data acquisition and a free of charge data policy [
9]. The only drawback of C-band data in forest application is the low penetration to forest volume due to short wavelength, which could restrict detectability of minor damages. The ALOS PALSAR-2 with L-band SAR, with deeper penetration depth than C-band and fully polarimetric capability, would likely better suit forest applications [
10,
11], but the operational use is restricted by data availability [
10,
11]. ESA’s coming forest specific P-band BIOMASS mission may provide information for monitoring aboveground biomass and its change over large areas, but will not be operated over Europe [
12]. The data availability and price also restrict the usability of high resolution X-band SAR data that could enable spatial texture analysis of SAR backscatter for forest disturbance [
10] (a further detailed analysis of possible scenarios is given in
Section 1.2) In the future, new satellites and constellations, such as NISAR [
13] and ICEYE [
14,
15] as well as planned DLR TanDEM-L [
16] and ESA ROSE-L [
17] may improve the situation significantly.
Thus, Sentinel-1 presently and in the near future seems to be the most suitable tool for forest damage assessment in Europe at operational level.
The overall goals of this study were to develop methods to localize the forest windstorm damages, assess the severity and area of damaged forests and quantify the uncertainties in forest damage prediction when using space-borne SAR data.
The detailed objectives were:
to study the potential of Sentinel-1 SAR data in localizing the forest windstorm damages;
to assess the accuracy of the developed methods; and
to assess the time lag from the damage to the damage detection and a ready product.
1.2. Windstorm Damage Studies with SAR
Several windstorm studies with SAR are shortly reviewed in this section, as well as studies using airborne SAR instruments. It is expected that the number of SAR-based studies will increase with the increasing data availability.
Green [
18] investigated the sensitivity of SAR backscatter to forest windstorm damage gaps using multi-polarization C, L and P band data acquired by the NASA/JPL AIRSAR in August 1991. The study showed that changes in backscatter due to the presence of windstorm damage gaps were evident in each polarization channel used, especially with C-band HH polarization in a coniferous plantation. It is suggested that backscatter is sensitive not only to the presence but also to the shape and geometry of the windthrow gaps.
Dwyer et al. [
19] used ESA’s C-band ERS-1/ERS-2 interferometric image pairs and found them to be effective in differentiating between damaged and undamaged forests when the damaged areas were larger than or equal to 2–3 ha. The damage happened in Jura mountain in France in December 1999. Ready software by ESA made fast data processing possible.
Fransson et al. [
3] studied the potential of CARABAS-II long wavelength SAR imagery for high spatial resolution mapping of windstorm damage forests. The results of this research show that the backscattering amplitude, at a given stem volume, is considerably higher for windstorm damage thrown forests than for unaffected forests. In addition, the backscattering from fully harvested storm-damaged areas was, as expected, significantly lower than from unaffected stands. These findings imply that VHF SAR imagery has potential for mapping windthrown forests.
Another study by Fransson et al. [
4] investigated simulated wind-thrown forest mapping (controlled experiment with felling of trees) using multitemporal ALOS PALSAR (L-band), RADARSAT-2 (C-band) and TerraSAR-X (X-band) imagery. The detection methodology was based on bitemporal change detection and visual interpretation of scenes acquired before and after a simulated windthrow event. Stripmap ALOS PALSAR images were found less suitable for a damage area detection, likely due to a coarse spatial resolution. The windthrown forests were well visible when the RADARSAT-2 and TerraSAR-X HH polarization images were used.
Ulander et al. [
20] used space- and airborne SAR data to map windthrown forests in southern Sweden. Analysis of the Space- and Airborne C-band SAR images including Envisat and Radarsat showed that they are unable to detect forest storm damage. The CARABAS VHF-band SAR, on the other hand, showed that these data can detect most storm-damaged forests as well as power lines, and sometimes better than the aerial photographs.
Thiele et al. [
21] used TerraSAR-X data and focused first on the border line extraction of forest areas to enables a fast estimation of windthrown areas, whereby the pre-event forest border is derived from multi-spectral data. Second, clean-up operations were monitored in the affected forest areas by applying a change detection operator. They presented a method to extract the border of forest areas by fusing multi-aspect SAR images. They found that this extraction of multi-temporal changes and displacements of the forest border enables a rapid damage estimation, which is very useful to plan first clean-up operations. In addition, their intensity-based change detection showed good results to highlight small areas especially with hard to analyze data, even for human operators.
Eriksson et al. [
6] showed that, when trees are felled, the backscattered signal from TerraSAR-X (X-band) increases by about 1.5 dB, while for ALOS PALSAR (L-band) a decrease with the same amount is observed. Radar images with fine spatial resolution also showed shadowing effects that should be possible to use for identification of storm felled forest.
Tanase et al. [
22] applied L-band space-borne SAR data to windthrow and insect outbreak detection in temperate forests. The results show that changes in backscatter relate to the damages caused by the wind and insect outbreaks. In this case, an overall accuracy of 69–84% was achieved for the delineation of areas affected by the wind damage. The study showed that L-band space-borne SAR data can be employed over larger areas and ecosystem types in the temperate and boreal regions to delineate and detect damaged areas.
Rüetschi et al. [
8] developed a straightforward approach for a rapid windthrow detection in mixed temperate forests using Sentinel-1 C-band VV and VH polarization data. Following radiometric correction of Sentinel-1 scenes acquired approximately 10 days before and 30 days after the storm event, a SAR composite images of before and after the storm were generated. The differences in backscatter before the storm and after the storm in windthrown and in intact forest were studied. A change detection method was developed. Locations of windthrown areas of a minimum extent of 0.5 ha was suggested. The detection was based on user-defined parameters. While the results from the independent study area in Germany indicate that the method is very promising for detecting areal windthrow with a producer’s accuracy of 0.88, its performance was less satisfactory at detecting scattered windthrown trees. Moreover, the rate of false positives was low, with a user’s accuracy of 0.85 for (combined) areal and scattered windthrown areas. These results underscore that C-band backscatter data have a great potential to rapidly detect the locations of windthrow in mixed temperate forests within approximately two weeks after a storm event.
Other methods potentially suitable for mapping windthrown forests with SAR data include approaches demonstrated in other studies of natural and/or anthropogenic forest disturbance. These include mapping snow-damaged forest areas [
23], monitoring selective logging and thinning operations in boreal and tropical forest biomes [
11,
24,
25,
26,
27,
28], forest clear cutting and other forest changes [
29,
30,
31,
32,
33,
34].
A common observation is that, while at L-band direct pixel-wise (or area-based) change detection using averaged-backscatter can be attempted, due to a better sensitivity to forest structure and volume, this does not really work at shorter wavelength such as C-band. Especially in the absence of fully polarimetric SAR capability. At C-band, texture analysis/extraction and subsequent image segmentation should be attempted after speckle is reduced (e.g., using image aggregation of scenes acquired before and after the forest disturbance event). At C-band, felling of trees does not change strongly the total backscatter, since the needles and smaller branches still create “bright enough” random-volume layer. Thus, texture from shadows in standing and fallen trees is the key feature to rely upon in the analysis. At even shorter wavelength and even higher resolution, such as X-band, texture analysis becomes the central way to proceed with the change detection, in addition to single pass interferometry with X-band data. Interestingly, most of the studies cited above rely on some kind of bitemporal change detection (even if “before” and “after” scenes are aggregated in two composite images). This does not really allow analyzing the added value of incorporating additional scenes of temporal dimension into the analysis. However, the idea of using textural features, even at stand level, and follow-up image segmentation appears most fruitful and is adopted and elaborated in our further analysis and methodology development.
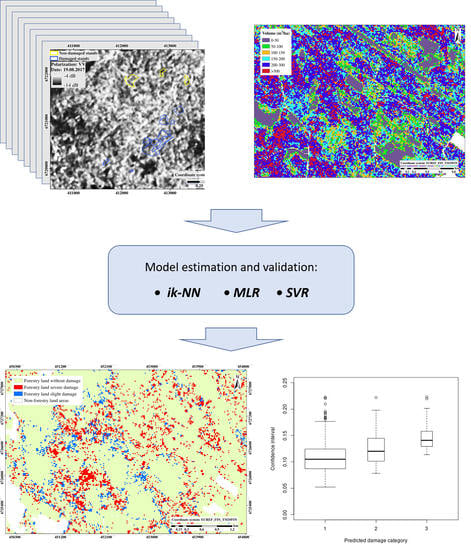
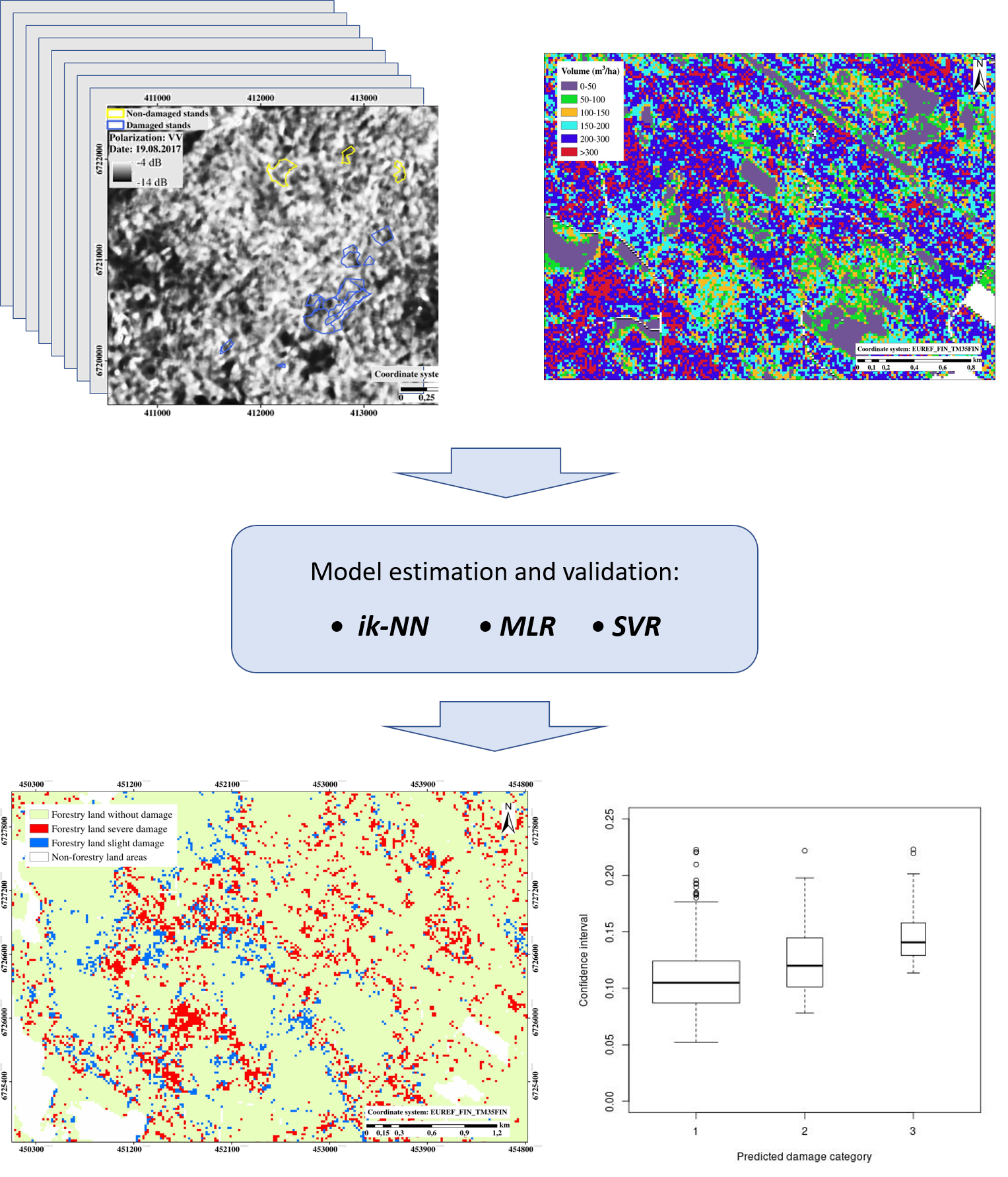
3. Methods
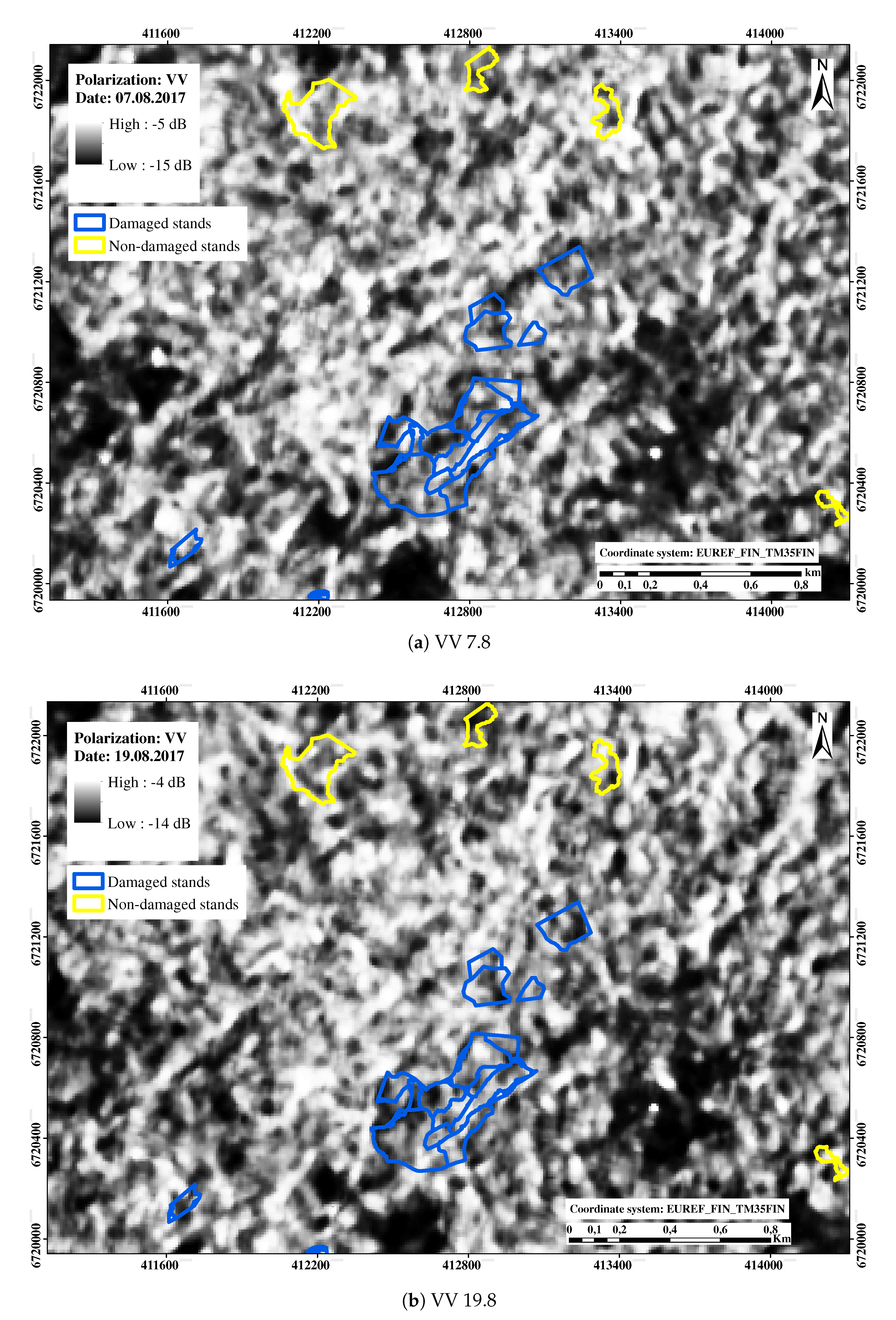
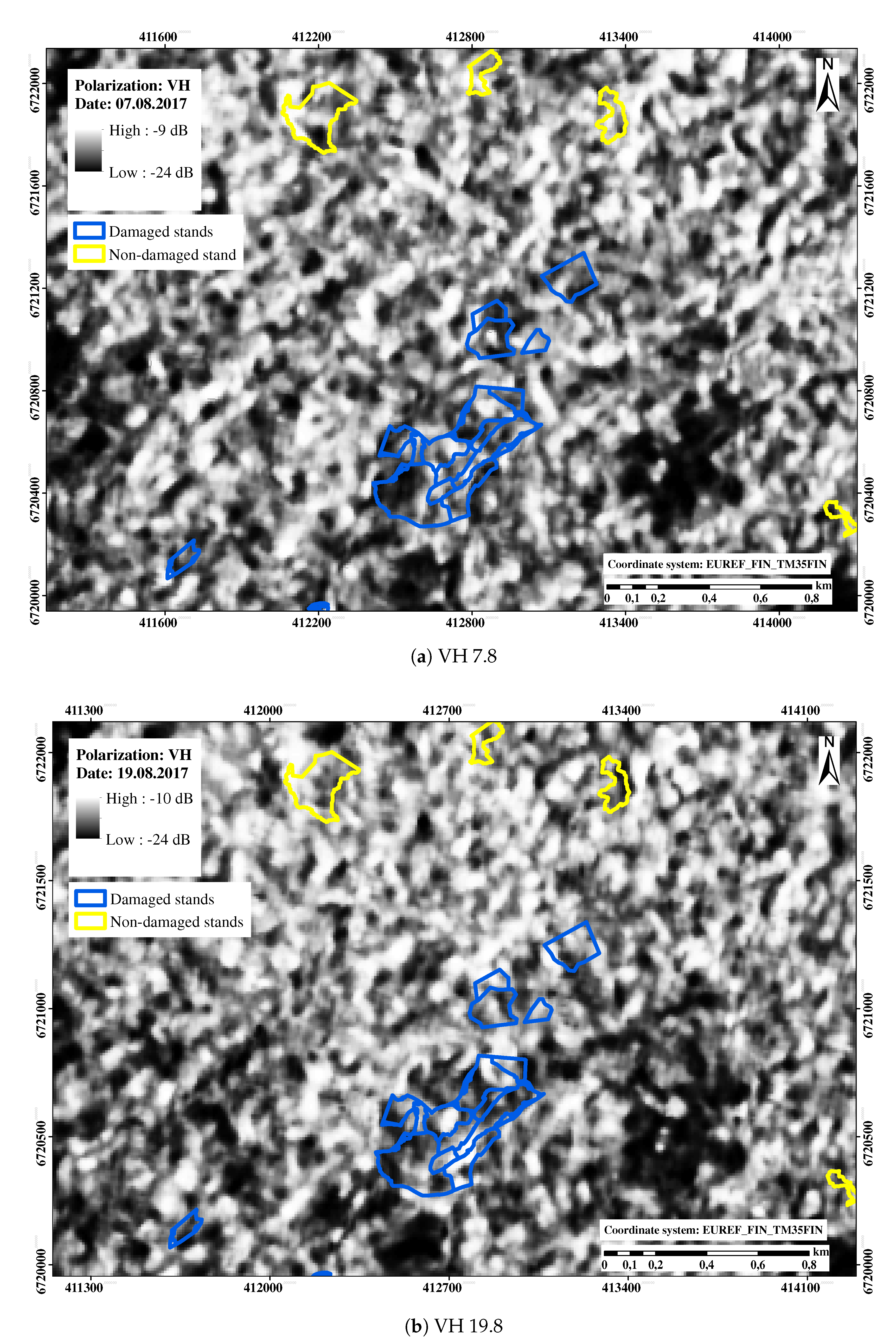
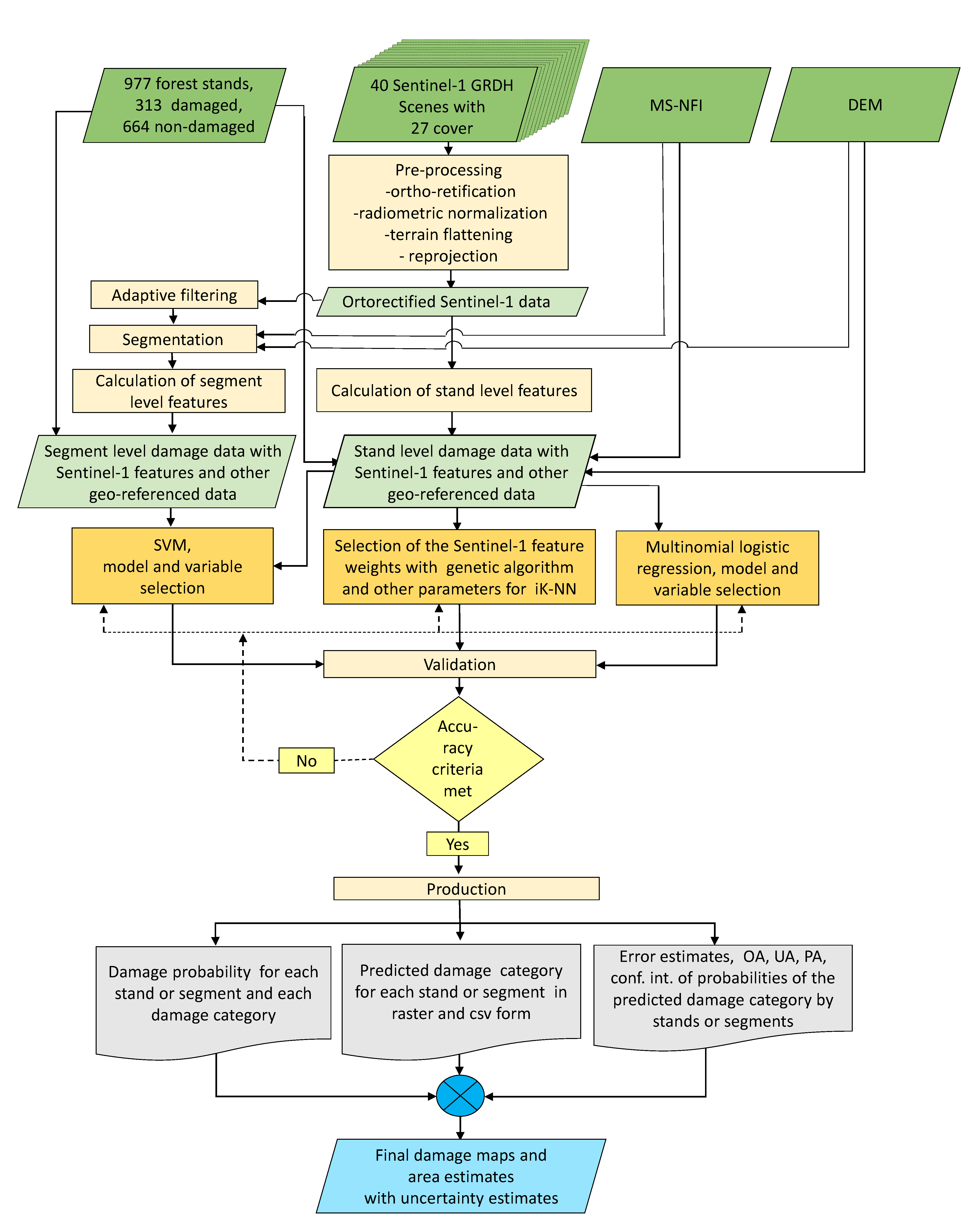
Three different classification methods, the improved k-NN (ik-NN), multinomial logistic regression (MLR) and support vector machine classifier (SVM), were tailored for windstorm damage detection to reach a desired detection accuracy level. The observations units in the models were forest stand level averages of the Sentinel-1 intensities or other stand level quantities of the input variables. Forest patches identified and derived using a segmentation algorithm were tentatively tested as optional observation units. The reason was that the damages do not necessarily follow the stand boundaries given by the Forest Centre. The segmentation-based units were tested only with the SVM classifier.
Figure 7 shows the logic and processing phases of the classification models training and windstorm-map production. The methods are described in detail in the following sections.
The main software tools used for analyses were as follows: (1) SNAP software by European Space Agency [
40] was used for Sentinel-1 image pre-processing; (2) GDAL [
41] was used for other image raster data pre-processing; (3) statistical computing package R [
42] with own codes was used for other data handling including the field data, as well as for MLR, SVM and statistical analyses (
Section 3.4,
Section 3.5,
Section 3.6); and (4) own algorithms for ik-NN (
Section 3.3), segmentation and adaptive filtering, written mainly in GNU Fortran [
43] (
Section 3.2).
3.1. SAR Metrics Used in the Damage Assessment
The basic SAR metrics were stand level variables calculated from pixel level variables for both polarizations. Using stand level metrics instead of pixel level metrics reduces the the speckle effect and the radiometric variation within homogeneous stands. From the pixel level intensities (), the following features were calculated for each stand s, for both polarizations p and for each image k:
(a) averages,
where
is the number of the pixels on stand
s; (b) standard deviations
and (c) intensity-ratios
These predictor variables, stand-averaged intensities (Equation (
1)), standard deviations (Equation (
2)) and different ratio features (Equation (
3)), were evaluated and, optionally, instead of the averages, also median and mode stand level intensities.
The training data and the validation data and their ’stand’ boundaries concerning the damages consisted of the cutting reports rather than the forest patches really damaged by the storm. A natural question is whether it is relevant to use SAR features calculated from the areas reported to be cut because the cutting area can be larger than the damaged area. The characteristics such as median and those calculated from the quantiles SAR features inside the cutting stands were also tested, in addition to the differences of the features from SAR data before and after the damage. Median is not as sensitive to the outliers as is, e.g., the average.
3.2. Segmentation-Based Observation Units
The areal units provided by the Finnish Forest Centre represent forest areas to be treated by sanitary cuts due to the windstorm damage. They may be larger than the real damage area. We tested whether it was possible to delineate the entire forest area into sub-areas of which a part of the sub-areas are changed due to the damage. A common practice is to use segmentation for the delineation of the area of interest. The input for segmentation should include the information of the changes. A speckle removal before segmentation could improve the quality of segmentation.
3.2.1. Adaptive Filtering
An adaptive edge-preserving filtering in further stand-level processing was tested. An own heuristic algorithm was implemented and used. It employs a set of alternative image windows (kernels) and selects the one with the smallest variance. The windows were selected inside a window of 5 × 5 pixels. The line and column coordinates for a set of 26 different windows are given in
Table 5 in the groups of three pixels. For example, (−2, −1, 0) (2, 1, 0) means the set of pixels (line, col) (−2, 2), (−2, 1), (−2, 0), (−1, 2), (−1, 1), (−1, 0), (0, 2), (0, 1) and (0, 0), the center pixel of the window, that is the pixel for which the average value is calculated and attached. Usually 3–5 consecutive runs, depending on data, are needed to identify homogeneous forest patches.
The window with the smallest variance was selected and the average value was attached to the center, that is, the pixel in question. The windows allow the detection of narrow linear form structures in the target and preserves those structures.
3.2.2. Segmentation Algorithm
We decided to test whether an algorithm implemented by us could be fine-tuned just for the damage detection with SAR data. The directed tree algorithm by Narendra and Goldberg [
44] was modified to use SAR data (see also [
45,
46]). In this simple test, we used only the difference of the intensities of two scenes, one before and one after the damage and separately VV and VH polarizations.
The algorithm utilizes an edge gradient calculated from an edge image. Any edge operator can be used to construct the edge image. Simplified steps of the segmentation algorithm are as follows. (1) Plateau points are calculated using the inverted edge image and a selected sensitivity (threshold) parameter
. (2) For each pixel
that is not a plateau point, a parent is determined. The parent of
,
, is the neighbor that gives the highest positive value of the inverted edge gradient among the neighbors of
. Ties are resolved arbitrarily. If no such neighbor exists,
has no parent and is therefore a root node. The parents of each plateau points are thus determined. All points on a uni-modal plateau will belong to the same directed tree with one point on the plateau that will be called a root. (3) Once the parent of each point is determined, the points can be labeled by the directed trees (segment) they belong to. The root pixels are first labeled. (4) Once the roots have been labeled, the label of each pixel is determined by tracing of the chains to link the pixels to their root pixels (for details, see [
44]). The final segmentation result does not depend on the processing order of the image.
3.3. ik-NN Method in Storm Damage Recognition
The well-known k-NN estimation method was tailored for and employed in storm damage recognition. The weights for the features were calculated with a genetic algorithm [
36,
47] and its variant for categorical variables [
48]. This k-NN method is called the ik-NN method (improved k-NN) here. The advantage of the ik-NN method is the weighting of the explanatory variables based on their importance in prediction and thus smaller prediction errors compared to the ordinary k-NN method, wherefore it is called improved. Other advantages of the k-NN method are that all variables can be estimated simultaneously. It preserves thus the natural dependencies of the variables in the estimates, e.g., among stand age, mean height, mean diameter of the trees and the volume of the growing stock. It is non-parametric, and no model is needed. When the weights for training observations are collected for the calculation units, it also avoids a tendency towards the mean in the areal level estimates that is typical for many other methods (see, e.g., [
36]). The k-NN estimation method became popular in forest applications when it was taken into into the operational Finnish multi-source forest inventory (e.g., [
49,
50]). It is very well suited for calculation of the areal level estimates.
Let us recall the main features of the ik-NN estimation with the genetic algorithm in the feature weighting. Denote the
k nearest feasible stands by
when the distance is calculated in the feature space. The weight
of stand
i to stand
p is defined as
The value of
k was fixed to be 5 after preliminary tests using the overall accuracy as the criterion. The distance weighting power
t is a real number, usually
. The value
t=1 was used here. A small quantity, greater than zero, is added to
d when
and
.
The distance metric
d employed was
where
is the
lth SAR feature variable of stand
p,
is the
lth SAR feature variable of the nearest neighbor
j of stand
p,
the number of SAR feature variables and
the weight for the
lth SAR feature variable.
The values of the elements
of the weight vector
were selected with a genetic algorithm. The details of the genetic algorithm employed are given in [
47] and the modification to categorical variables in [
48].
The fitness function for the categorical variables to be minimized with respect to
vector was
where
is a user defined coefficient,
an error matrix,
is the accuracy measure with response variable
j whose classes are to be predicted,
is the number of response variables to be considered in the optimization procedure and
is the weight vector to be optimized (Equation (
5)). The number generations in the genetic algorithm optimization was selected to be 40 after the tests.
For categorical variables, the mode or median of the predicted classes for the nearest neighbors can be used as a prediction instead of a weighted average as is used for continuous variables. For this study, the mode gave more accurate results than the median, consistent with the earlier investigations [
48]. The predicted category is the category that has the greatest sum of the weights,
, when summed up by classes over the k nearest neighbors. In theory, equal sums are very rare when real value weights are used; in fact, the probability is zero if rounding is not considered. In cases of equal sums for two or more classes, one class is selected randomly from among those with the greatest sum. This method was used for predicting the categorical variable obtaining the values, the value being the damage category.
3.4. Multinomial Logistic Regression Method
Multinomial logistic regression was tested as one optional estimation method. The probability of the damage category
k on stand
p was estimated using the model
where
is a linear predictor function,
is the vector of the regression coefficient associated with damage category
k,
is a vector the set of the explanatory variables associated with observation (stand)
p and
L is the number of the damage categories, here 3.
3.5. Support Vector Machine Method
Support Vector Machine method (SVM) is a machine learning technique presently actively adopted in remote sensing [
23,
51,
52,
53,
54]. SVMs are supervised learning models with associated learning algorithms that analyze data used for classification or regression. Given a set of training examples, each marked as belonging to one or the other of two categories, an SVM training algorithm builds a model that assigns new examples to one category or the other, making it a non-probabilistic binary linear classifier [
55].
SVMs are based on statistical learning theory and have the aim of determining the location of decision boundaries that produce the optimal separation of classes. [
56]. In the case of a two-class pattern recognition problem with linearly separable classes, the SVM selects from among the infinite number of linear decision boundaries the one that minimizes the generalization error. Thus, the selected decision boundary will be the one that leaves the greatest margin between the two classes, where the margin is defined as the sum of the distances to the hyperplane from the closest points of the two classes [
56]. The margin maximization is achieved using standard quadratic programming optimization techniques. The data points that are closest to the hyperplane are used to measure the margin and are referred to as support vectors.
If the two classes are not linearly separable, the SVM tries to find the hyperplane that maximizes the margin while, at the same time, minimizing a quantity proportional to the number of misclassification errors. The trade-off between margin and misclassification error is controlled by a user-defined constant [
55]. SVM can also be extended to handle nonlinear decision surfaces by projecting the input data onto a high-dimensional feature space using kernel functions [
56]. Radial basis functions with accordingly selected parameters are a typical choice to serve as kernel functions [
51,
52]. The gamma value varied here between 0.1 and 0.005 depending on the dataset.
As SVMs are designed for binary classification, this method appears to be an ideal fit for outlier detection problems, i.e. separating damaged forest class against intact using temporal dynamics of SAR backscatter. However, for estimating severity of damage (evaluating “change magnitude”), the approach is less suitable.
3.6. Area Estimates and Error Estimates
We used poststratified estimators for the area and area error estimators [
57], as derived and suggested by Olofsson et al. [
58]. The estimators use the confusion matrix and the area estimates of the categories based on an output map, that is, the pixel level estimates of the categories. The stratified estimators of the proportion of a category
k is
where
is the
element of the confusion matrix, observed counts on the columns and classified on the rows;
is the row sum of the row
i;
L is the number of the categories; and
is the proportion of the area mapped as category
i. The area estimate of category
k is
where
A is the total area mapped.
The standard error for the poststratified estimator of the proportion of area (Equation (
8)) is estimated by
where
, and standard error of the the area by
An approximate 95% confidence interval is obtained as .
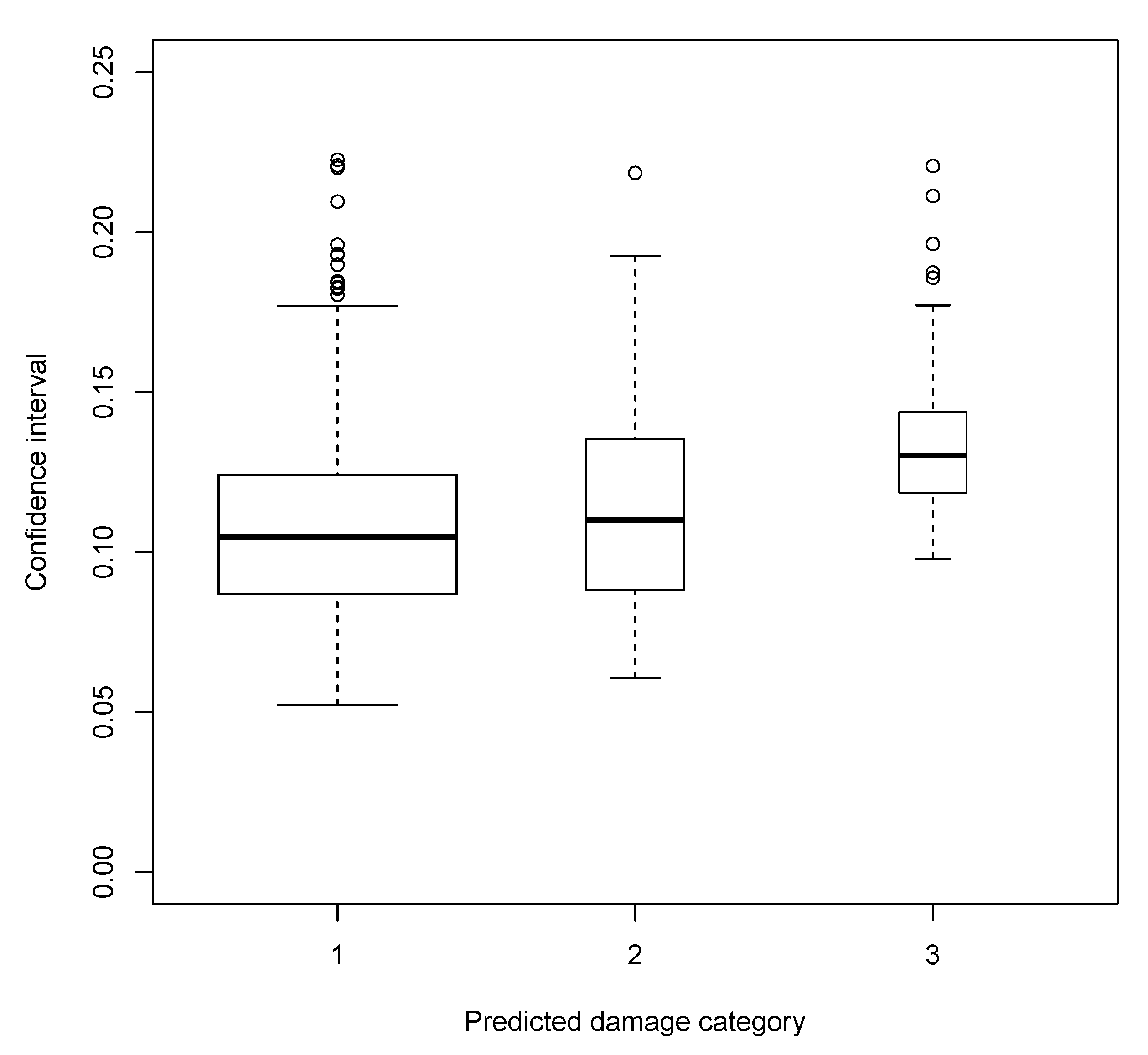
3.7. Confidence Intervals of Probabilities for Individual Observations Using ik-NN
The following procedure can be used to assess the uncertainty of the prediction of the damage and non-damage of individual stands or forest areas. The k-NN estimation and its improved version ik-NN produce probabilities for the predicted category on stand
p. These probabilities can be calculated using the weights
(Equation (
4)) as follows
where
k is the mode category based on the largest sum of the weights
by categories on stand
and
is an indicator function of the category in stand
i. The confidence intervals for the probabilities of the mode for the individual stands were calculated using a linear model
where
are the SAR features (Equation (
5));
k is the predicted damage category, a categorical variable (factor);
a,
b and
c are the regression coefficients to be estimated (
b being a vector); and
is a normally distributed random error.
The confidence intervals of the predictions were calculated in a normal way using the estimator
for the variance for the individual prediction with a predictor vector of
, residual sum of
and design matrix
consisting of the feature vectors
f and predicted categories
k.
5. Discussions and Future Work
The windstorm analyzed in this study took place during the Finnish summer, on 12 August 2017, wherefore the most important Sentinel-1 scenes were also from the summer. Earlier and other ongoing studies have revealed that late autumn or early winter is the best season for forest parameter estimation from SAR images in the boreal region (e.g., [
59,
60]). The results of this study show that the summer SAR images could also be applicable in forest change detection caused by a windstorm damage. One challenge when developing an operational damage monitoring method is that the windstorms occur all around the year, including during winter in Scandinavia and other boreal region. The weather conditions and the temperature can also rapidly change from above to below 0 °C. Under frozen conditions, a normalized radar cross-section decreases (e.g., [
61]). Generally, freeze–thaw environmental transitions affect the classification methods and accuracies if they happen just after or during the damage and if a rapid assessment is needed.
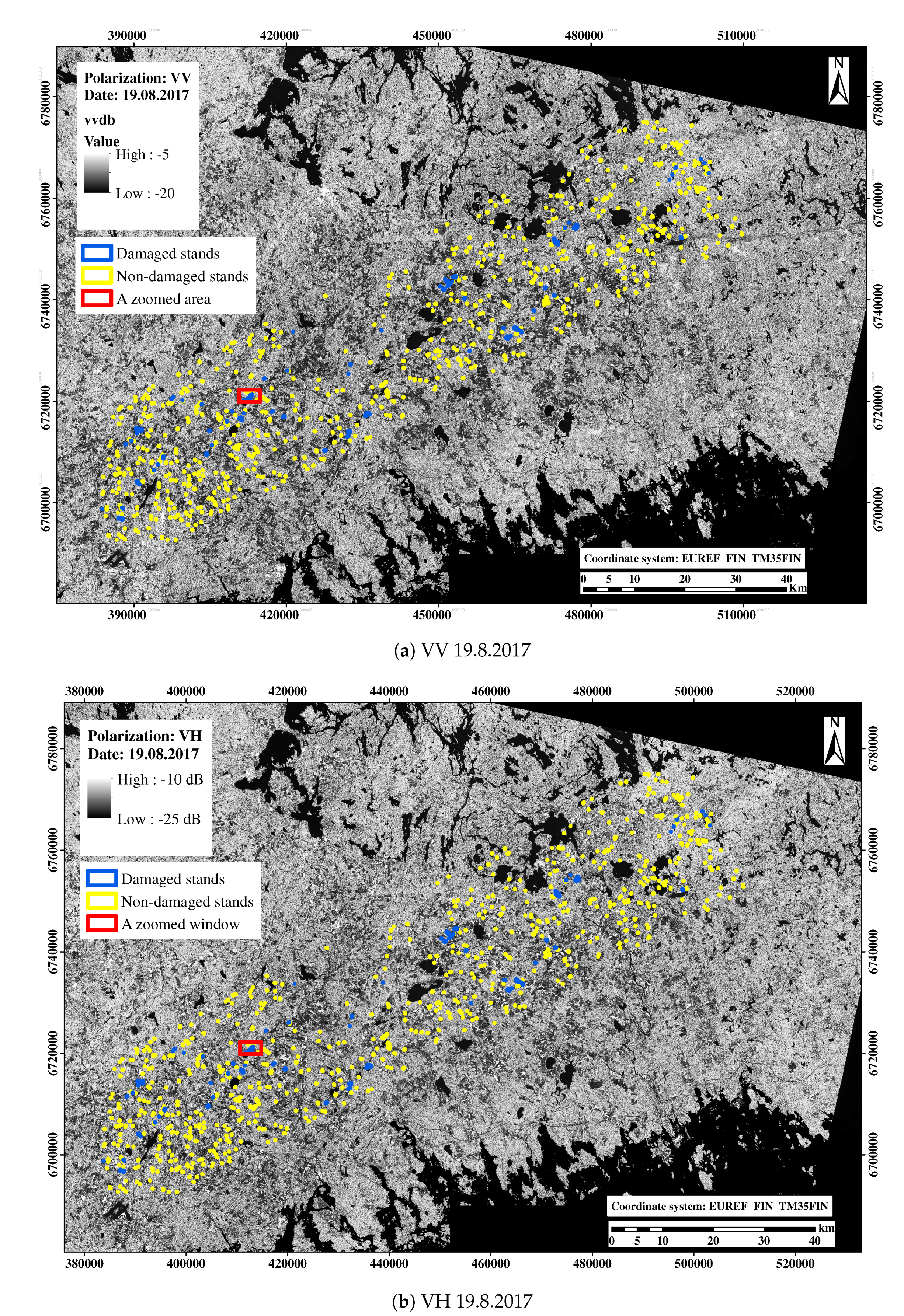
This study provides some alternative methods to be developed further to be part of an operational windstorm damage monitoring system. Three different classification algorithm were tested to classify the forest observations on the three categories, non-damaged, severely damaged and slightly damaged forest patches. In total, 27 Sentinel-1 image covers were acquired and originally used, 16 before the damages and 11 after damages, in addition to the field observations and other geo-referenced data. The explanatory variables were derived from the intensities of the two polarizations VV and VH of the Sentinel-1 images and from the quantities of the other geo-referenced data. Two alternative analysis units were tested: (1) the forest stands or forest areas to be cut due to the windstorm damage; and (2) the forest patches constructed using a segmentation algorithm. The main analyses were carried out with the Alternative 1. The data were split to training data and validation for assessing the uncertainties of the results of the different methods. A statistical method was developed to construct the confidence intervals of the probabilities of the estimated damage categories. One goal was to find the minimum number of the images after the damages for a rapid operational monitoring method.
Using calculation units that are derived with a segmentation algorithm, that is, the units that are homogeneous with respect to backscattering coefficient, slightly increased the overall accuracies (OAs), and in some cases also the user’s accuracies (UAs). In some cases, the UAs and producer’s accuracies (PAs) were smaller than with the given boundaries. This may imply that the given boundaries followed the damaged areas or the effect of variation in the image conditions on the results is significant or the segmentation-based approach needs further development.
Although some windstorm damage studies have been published so far with space-borne SAR data, quantitative uncertainty assessments are generally lacking. Many comparisons with accuracy figures are thus not possible. Our results are competitive with, e.g., those of Thiele et al. [
21]. Our study showed that the damages could be identified even a few days after the damage, which is quite unique. On the other hand, we should keep in mind that windstorm damages vary by the areal extent of the damaged forest patches and also by severity. Furthermore, forest structures and imaging conditions vary wherefore uncertainty quantities are not necessarily comparable.
Preliminary tests showed that it could also be possible to develop an unsupervised method for windstorm damage monitoring, that is, to detect the changes without a specific training data.
Detection of the windstorm damage is a demanding task. Severity of the damages changes within the area of one storm, even in a relatively small area, e.g., the one in this study, 100 km × 100 km, and depends on many factors, e.g., the structure of the growing stock, the soil properties, the terrain elevation variation and the small scale spatial variation of growing stock. Forests next to an open area or a young forest are more vulnerable to damages than the forests surrounded by mature forests. Furthermore, in addition to the changes in the growing stock, many other factors affect the changes of backscatter and also in a short time interval, e.g., changes in the moisture of the tree canopies and soil. The possibility to frequently acquire SAR data is thus important.
It should be recognized that further work is needed for a near-real-time operational monitoring system.
In the continuation work, the accuracy of the estimates will be improved by further method development and additionally using interferometric SAR data as well as meteorological data. The use of other geo-referenced data, such as land-use data, forest age and soil data and forest data from the surrounding areas, may improve the classification accuracy because the windstorm damages occur often on the borders of open areas, newly constructed roads and power-lines as well as next to young forests or forest regeneration areas.
Potential of interferometric SAR coherence, possibly combined with backscatter intensity information, should be studied using Sentinel-1 multitemporal imagery, even though temporal decorrelation can limit its utility [
62]. Further, time series of bistatic TanDEM-X scenes can be used for mapping forest change, due to high sensitivity to the vertical structure of the forests [
63,
64]. For the latter, the limiting factor is data availability over large areas with small latency.
Coming and existing satellite missions and constellations with frequent and tailored data acquisition increase the availability of data. It is also important that data providers adopt a systemic data acquisition strategy similar to Sentinel-1 and ALOS/ALOS-2 missions in connection with the hazard monitoring, particularly windstorm detection. A background mission with at least seasonal global coverage can be suitable.
6. Conclusions
The methods to localize the forest damages caused by windstorms using space-borne SAR data were developed and possibilities to an operative system investigated. Multitemporal Sentinel-1 time series were used.
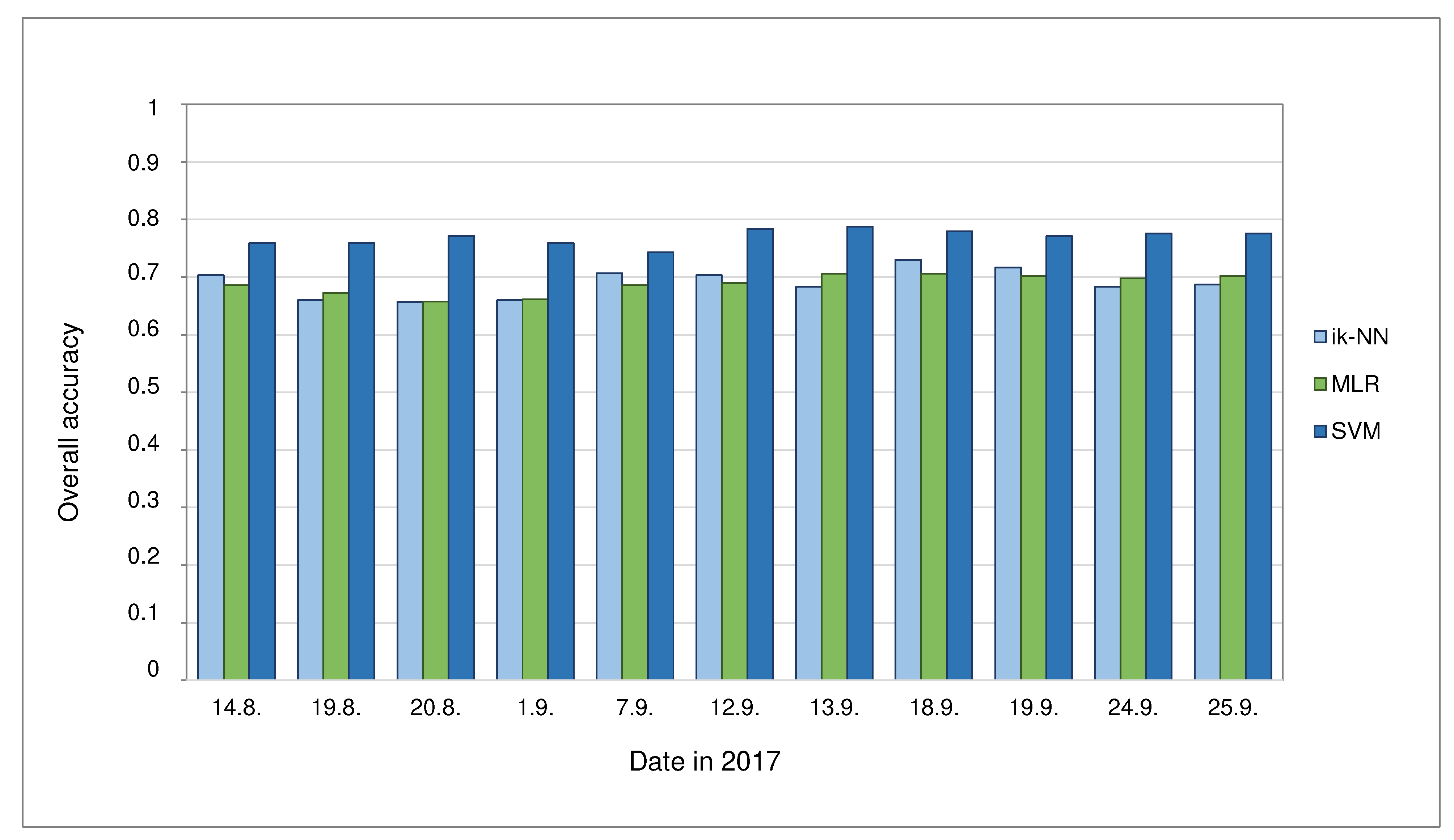
Support vector machine (SVM) gave the largest overall accuracies among the three methods tested, improved k-NN (ik-NN), multiple logistic regression (MLR) and SVM. The proportion of correctly classified stands (OA) in a separate validation data was 79%, and 75% if only one Sentinel-1 scene after the damage was used. The user’s accuracy (UA) for severe damages was 62%, and 75% for slight damages. The producer’s accuracies (PAs) were somewhat lower. The accuracy of 75% was achieved using only one Sentinel-1 scene after the damage, here two days after the damage, in addition to the data before the damage.
Using segmentation-based calculation units only slightly increased the OA, implying that this approach may presume further work. Most likely, not only SAR data, but also inventory and other auxiliary data should be used in the segmentation methodology.
The study indicates that the damages could be localized using only one Sentinel-1 scene after the damage implying a time-lag of potential satellite SAR-based assessment method would be just a few days after the damage. This gives promises that a SAR-based near-real-time semi-automatic operative system to monitor windstorm damages is feasible.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}