
Application of a Hand-Held LiDAR Scanner for the Urban Cadastral Detail Survey in Digitized Cadastral Area of Taiwan Urban City

Abstract
:
1. Introduction
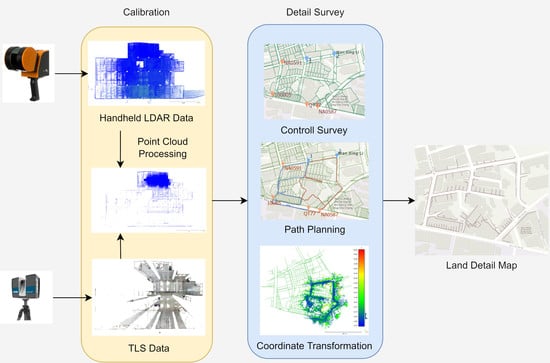
2. Methodology
2.1. Handheld LiDAR Scanner Calibration
2.1.1. Selection of the Calibration Field
2.1.2. Acquisition and Extraction of Calibration Reference Data
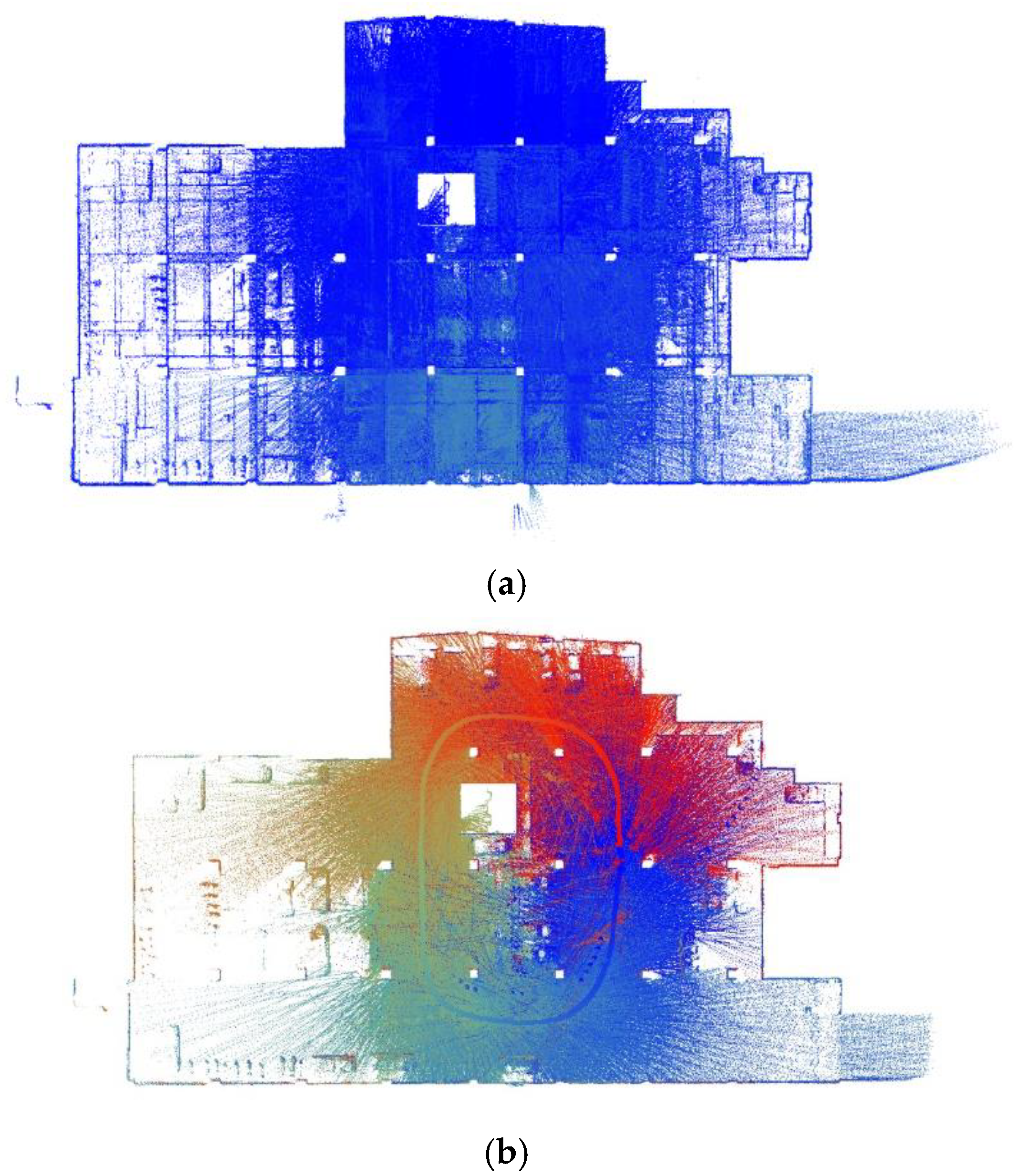
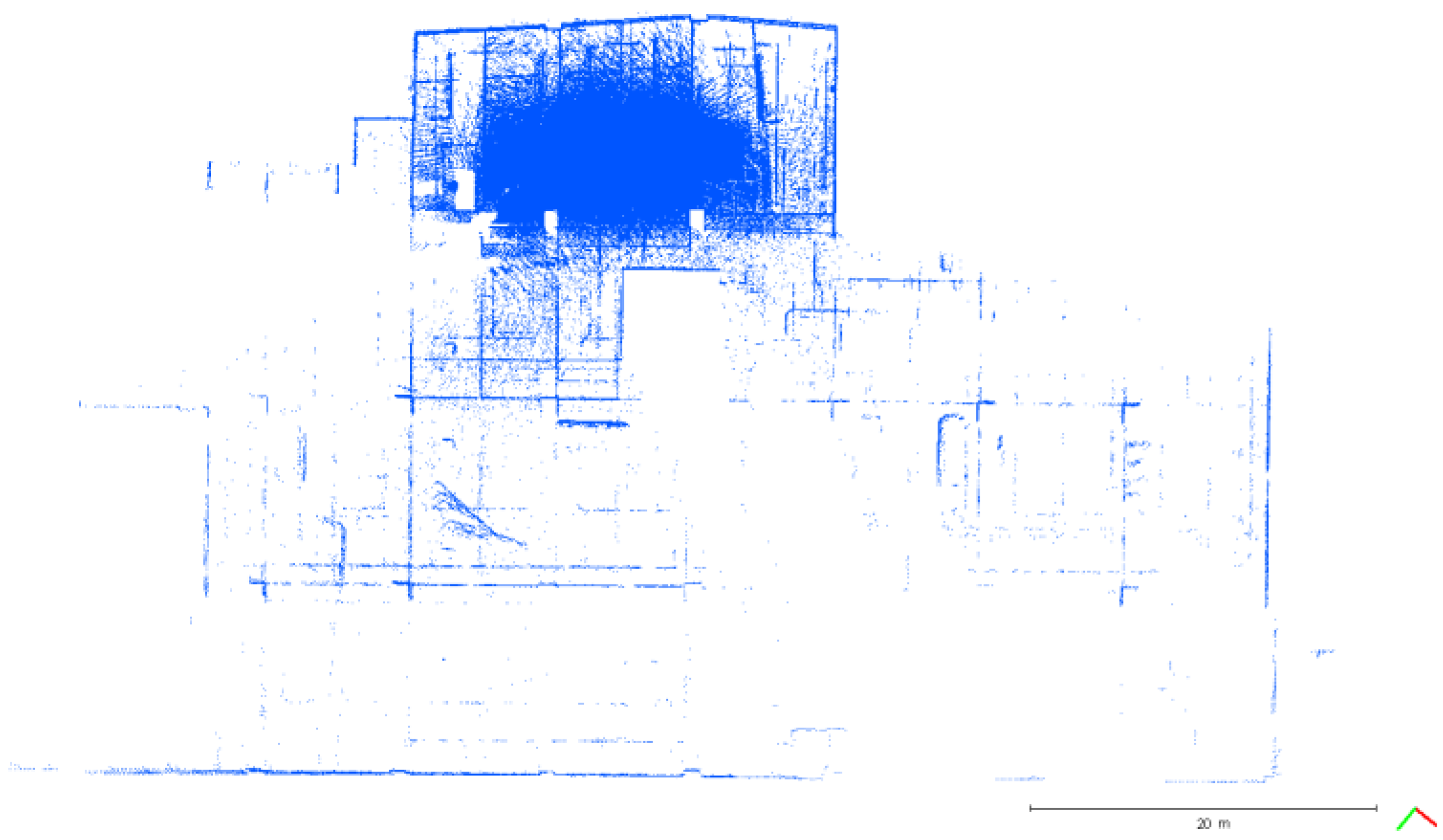
Ground-Based LiDAR Point Cloud Acquisition
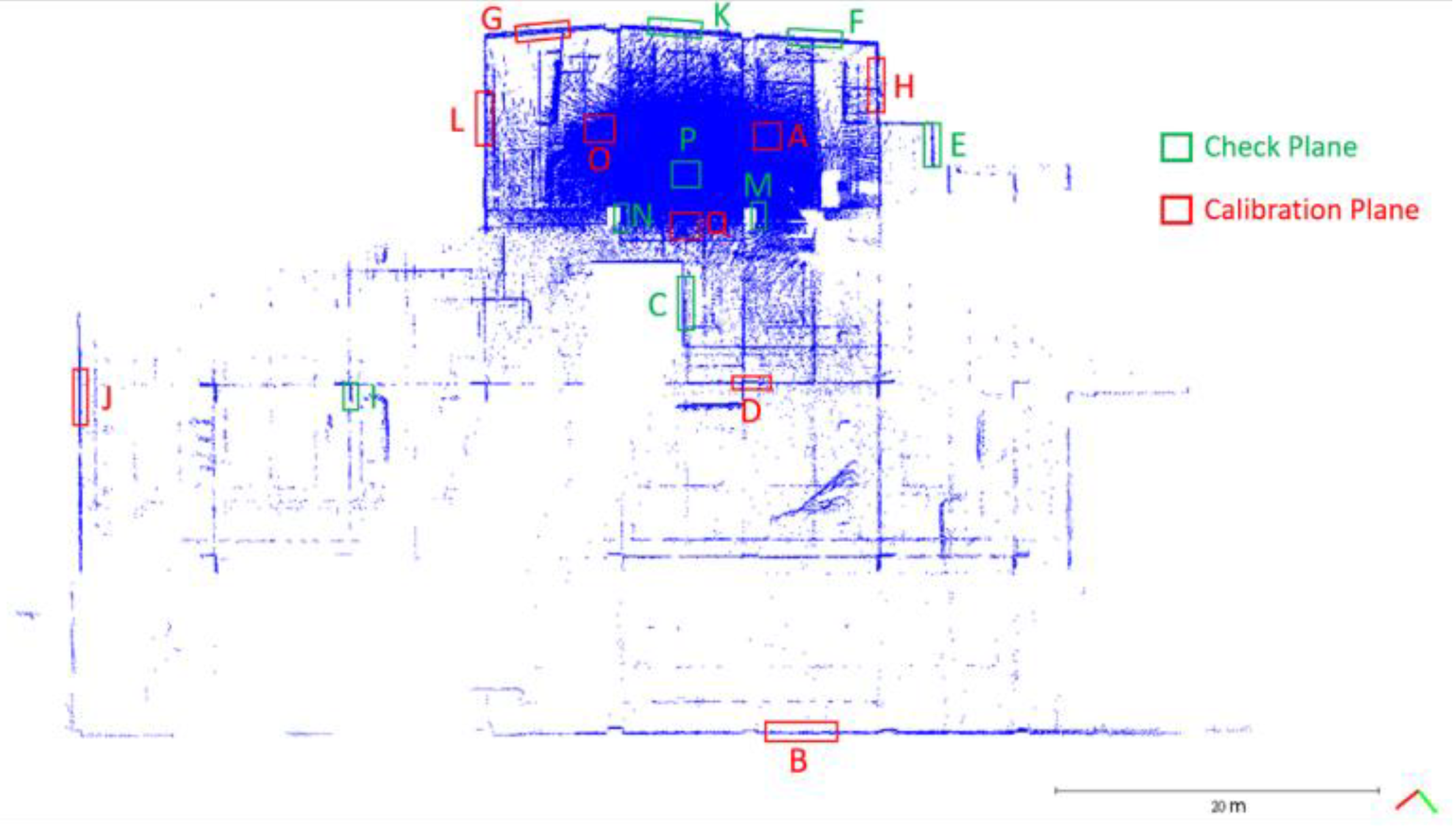
Extraction of Calibration Planes and Check Planes
2.1.3. Acquisition of Handheld LiDAR Pnt Cloud for Calibration Data
Filtering and Subsampling of Point Clouds
Blunder Point Filtering Using the RANSAC Algorithm
2.1.4. Mathematical Model for Calibration
Scanning Center Determination of Each Point
Mathematical Model for Calibration
2.1.5. Result Analysis
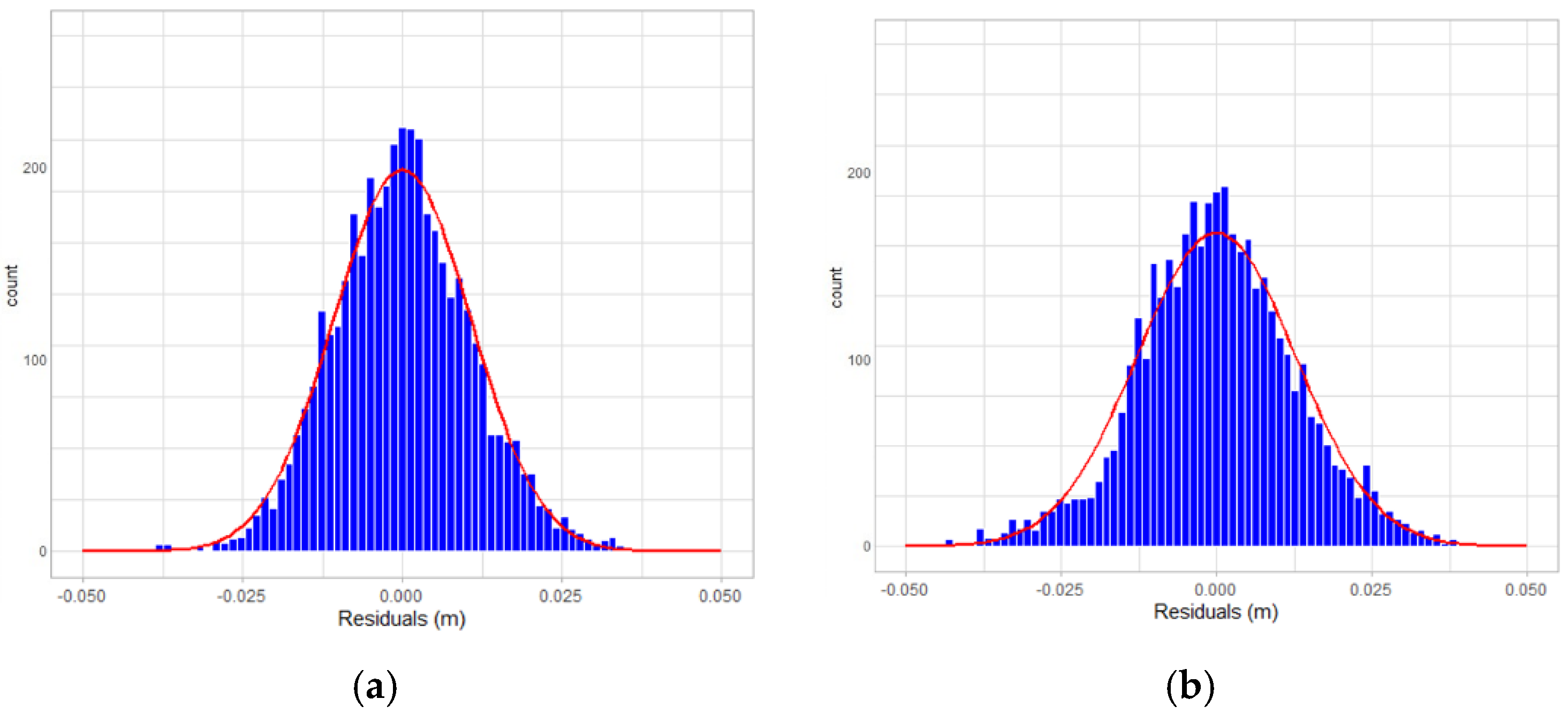
Residuals Analysis
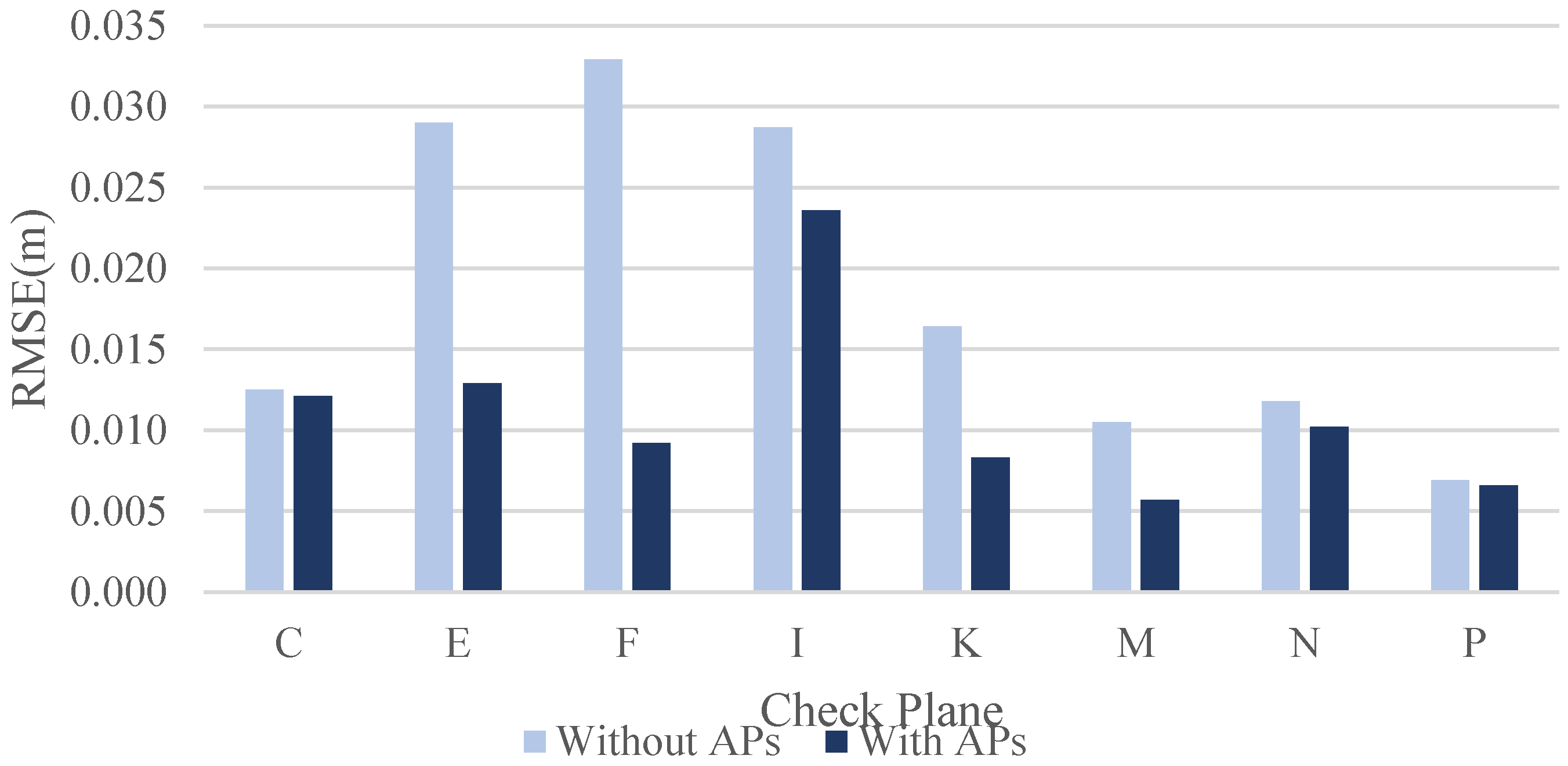
Verification by the RMSE of Check Planes
Analysis of Correlation Matrix of the Unknowns
Analysis of Ranging Systematic Error Parameters
2.2. Urban Cadastral Detail Survey
2.2.1. Ground Control Survey
2.2.2. Path Planning for Data Collection
- Avoid scanning moving objects, the SLAM algorithm may recognize them as static features and cause calculation errors [23].
- The moving speed should not be too fast which is not more than normal walking speed (1.1~1.5 m/s), and normal walking speed should be maintained to ensure a good point cloud density. When passing the building corner, because the scanning angle of view changes greatly, the speed and travel should be slowed down to obtain sufficient features to establish a trajectory [15,24].
- The scanning distance is recommended to be kept within 50 m to maintain good point cloud accuracy and point cloud density.
- The time of a single scanning task should be less than 30 min. When scanning a large field, the scanning task should be divided into several portions and the point cloud should be registered to reduce the probability of trajectory deviation [23].
- Avoid areas containing a lot of glass and windows. Glass and windows are prone to refraction of the laser beam and cause false point clouds [25].
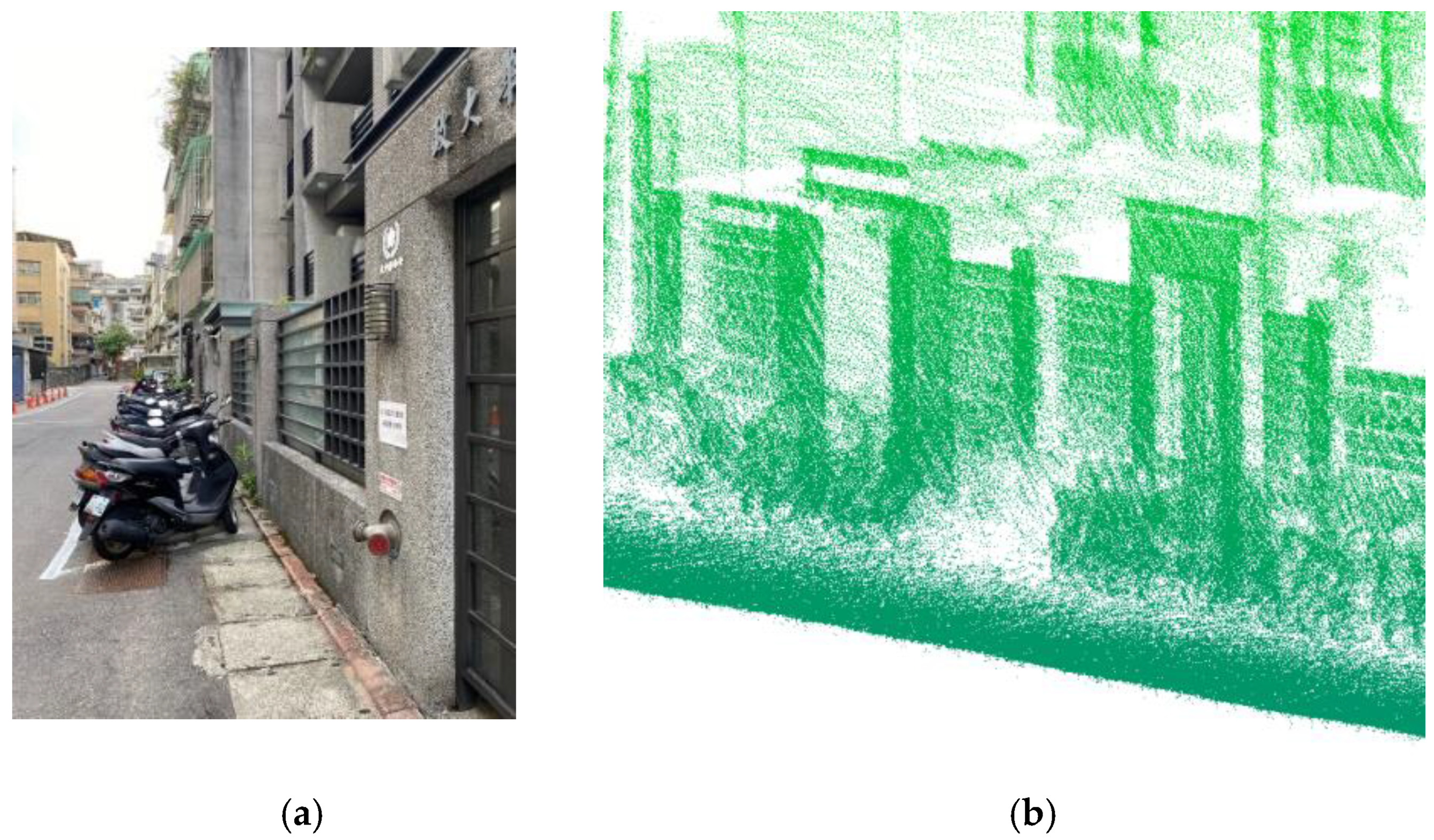
- When scanning narrow passages, the scanned path should be in the middle of the passage so that the scanner can obtain the features of the walls on both sides. If it is too close to the wall, the scanning angle is too small and it will lack feature acquisition [23].
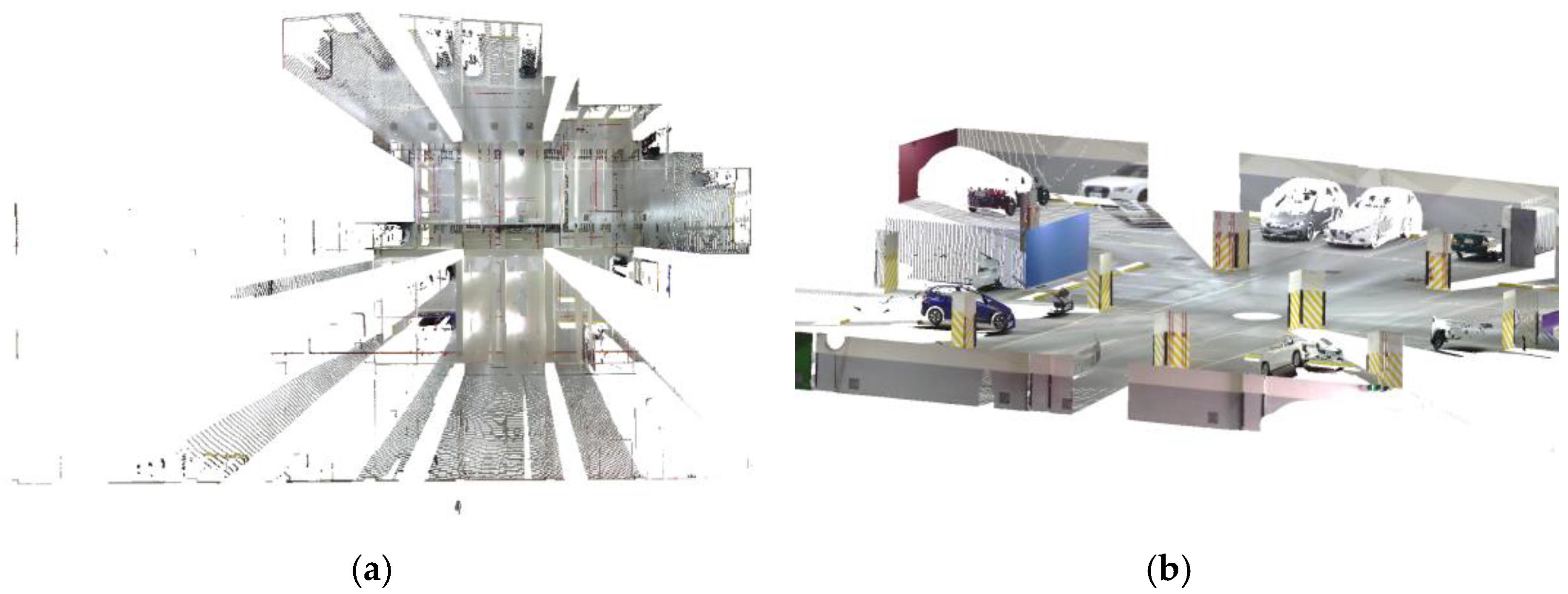
2.2.3. Point Cloud Processing
Filtering of Point Clouds
Ranging System Error Correction of Point Clouds
Coordinate Conversion
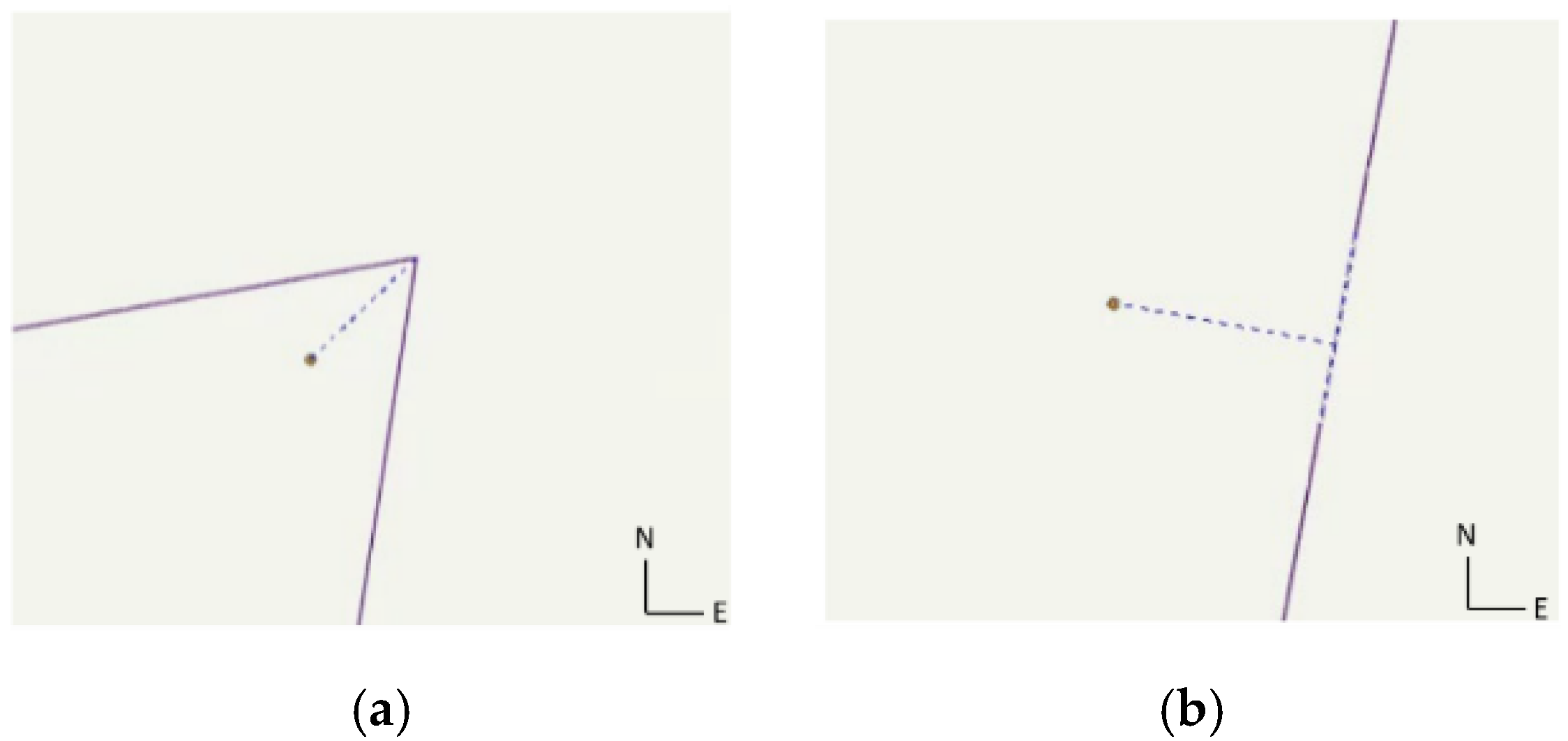
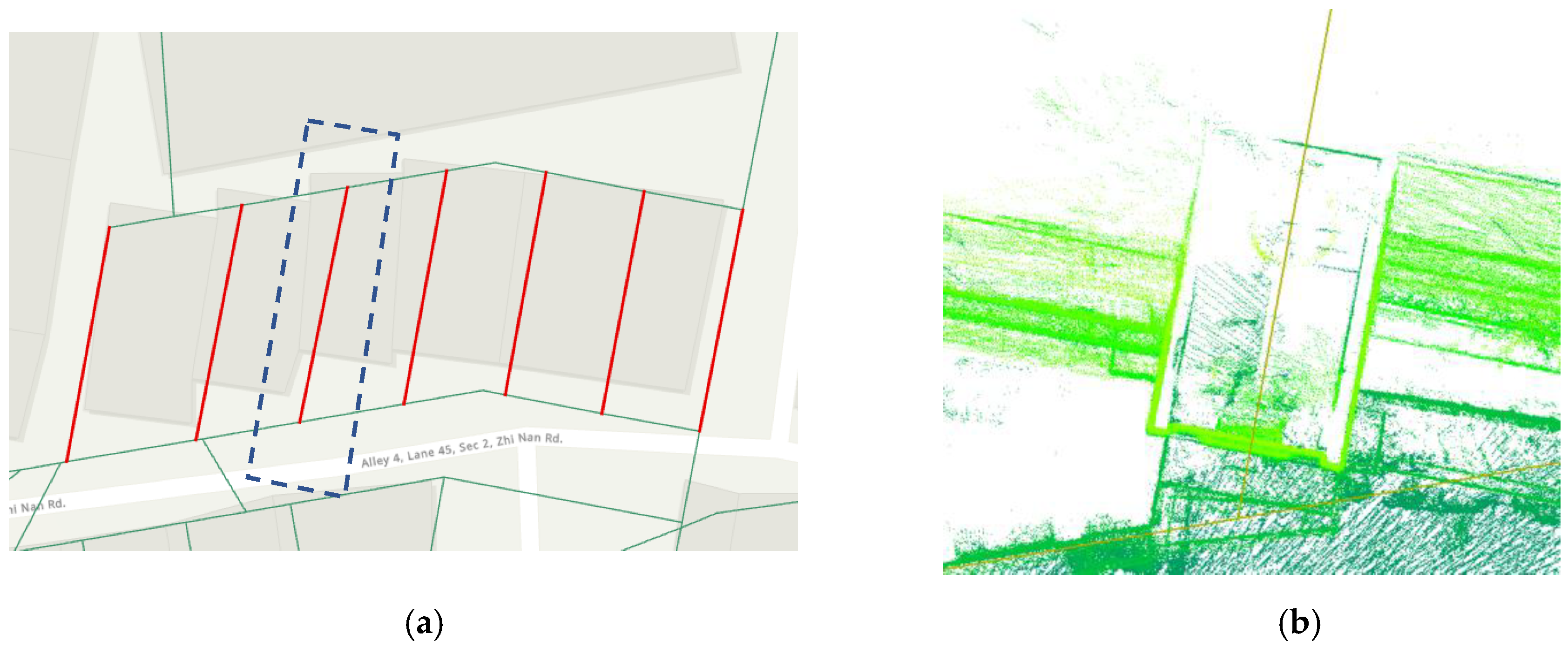
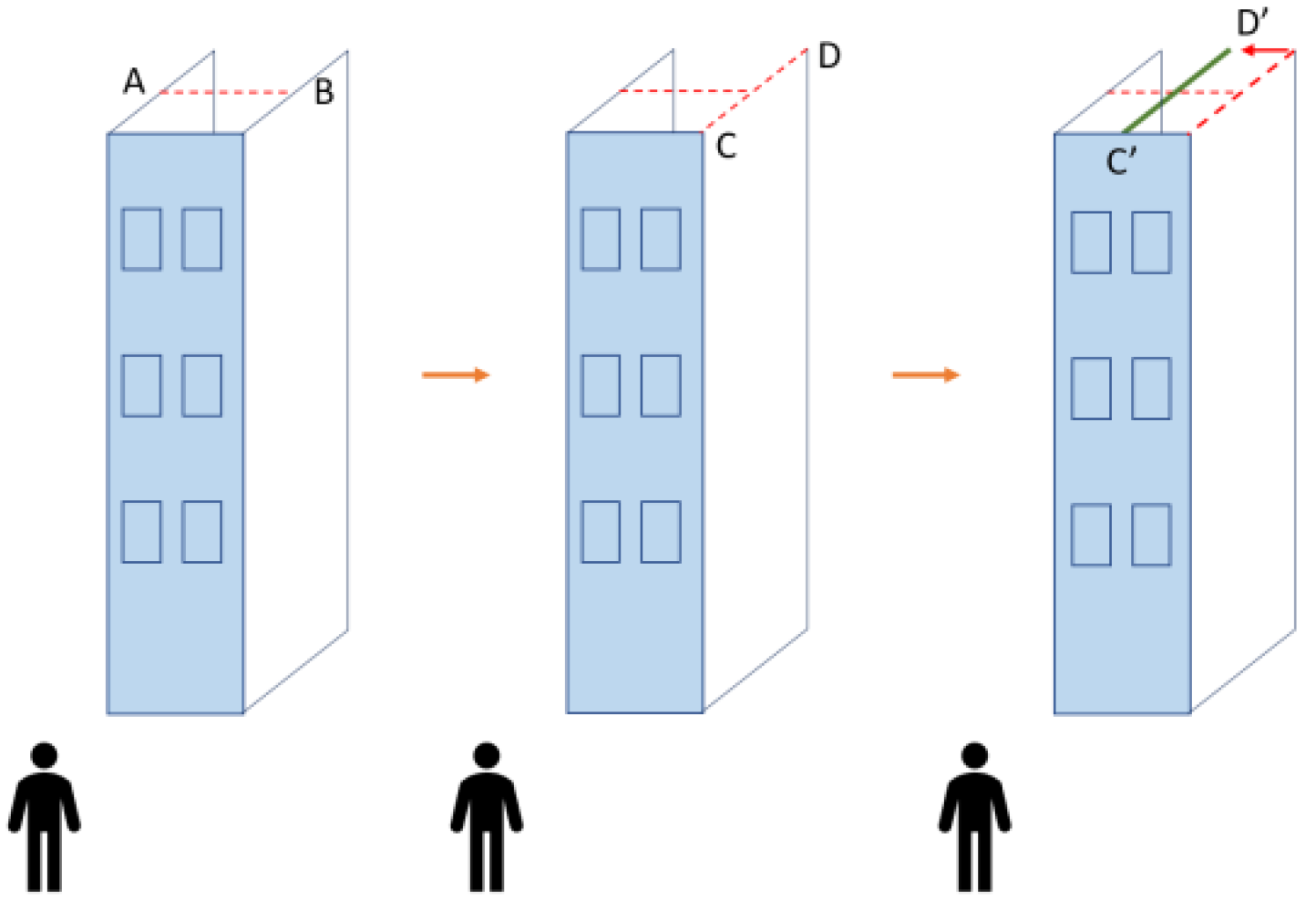
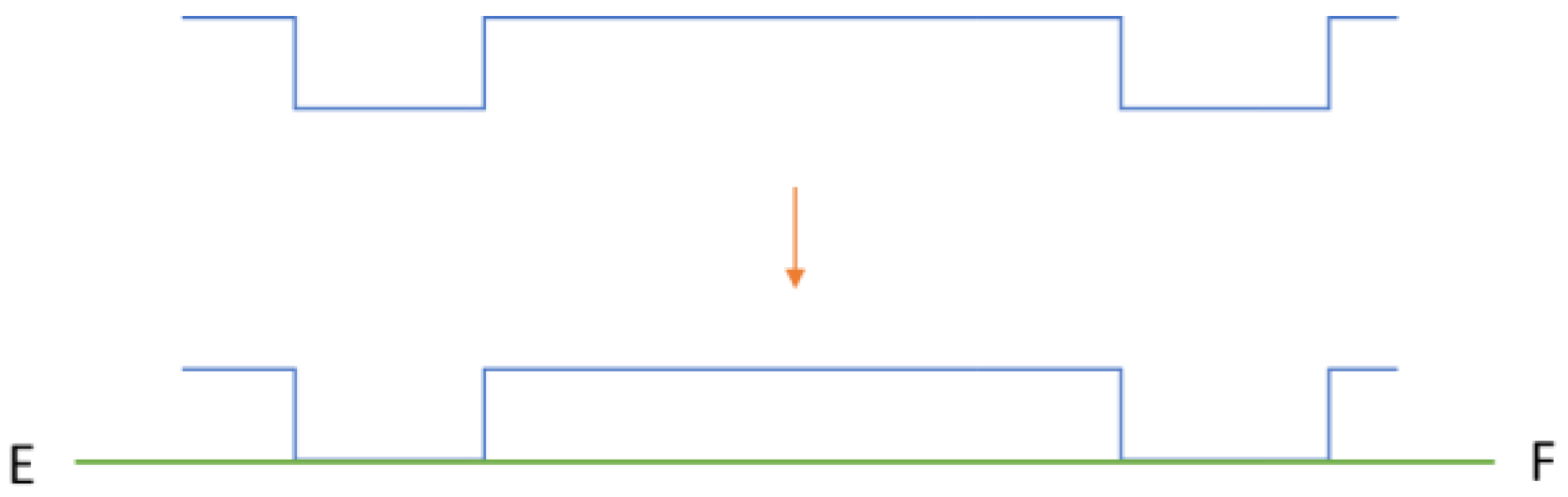
2.2.4. Urban Cadastral Detail Line Data Production
- (1)
- For urban buildings along roads, most of them are bounded by the building line designated by the road centerline stake of the urban planning road or the boundary of the existing road boundary. Road boundaries are the detail lines for manual digitization.
- (2)
- The detail lines of townhouses are mostly bounded by the center of the wall, but they still need to be judged by considering the difference in their structure or the decorative form of the exterior. The centerline of a wall on a building façade with the same building style except for the wall on the outer most boundary of a building.
- (3)
- Where there are exposed steel bars on the walls of side houses or independent houses, the center of the wall shall be the boundary, otherwise, the outer edge of the wall shall be the boundary.
- (4)
- The outer edge of a wall on the most outside boundary of a building with the same building style, and the outer edge of a wall of a single building except the wall attached with exposed steel reinforcing;
- (5)
- The eaves of the building belong to the building itself.
Results Analysis
- (1)
- Analysis of digitized detail lines.
- (2)
- Analysis on the effect of ranging system error correction.
3. Results and Discussion
3.1. Handheld LiDAR Scanner Calibration
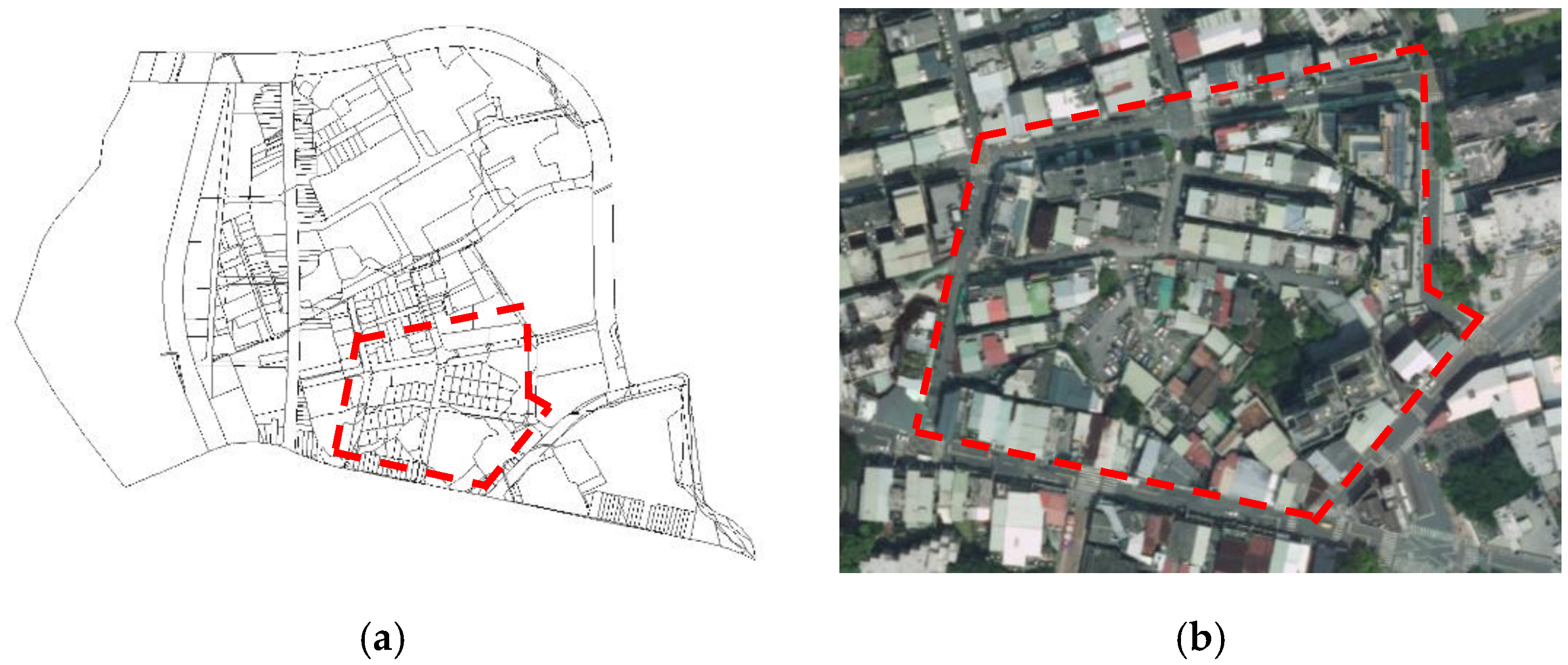
3.1.1. Selection of the Calibration Field
3.1.2. Acquisition and Extraction of Calibration Reference Data
3.2. Acquisition of Handheld LiDAR Point Cloud for Calibration Data
3.2.1. Filtering and Subsampling of Point Clouds
3.2.2. Blunder Point Filtering Using the RANSAC Algorithm
3.2.3. Results Analysis
Residuals Analysis
Verification by the RMSE of Check Planes
Analysis of Correlation Matrix of the Unknowns
Analysis of Ranging Systematic Error Parameters
3.3. Urab Cadastral Detail Survey
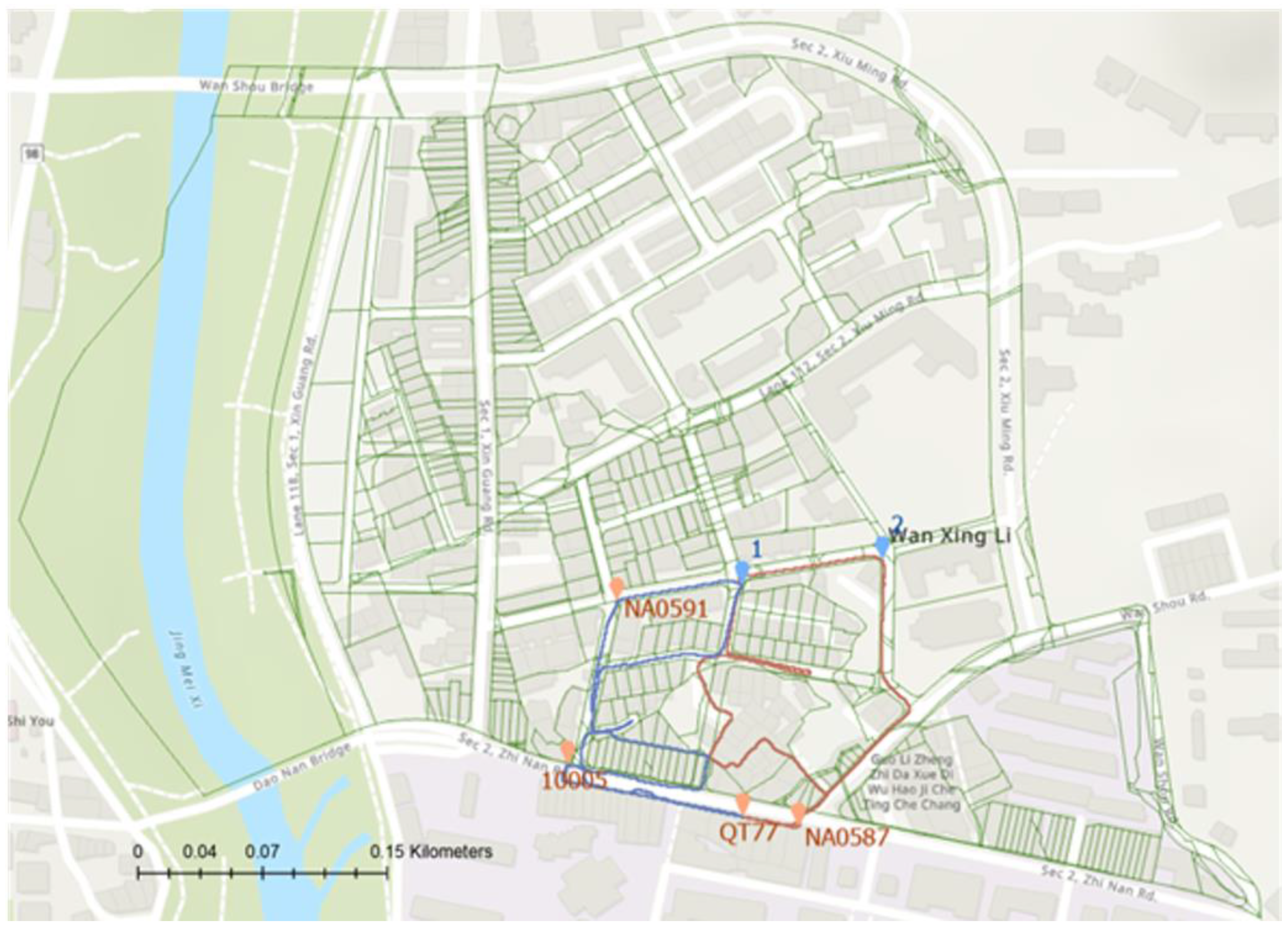
3.3.1. Ground Control Survey
3.3.2. Path Planning for Data Collection
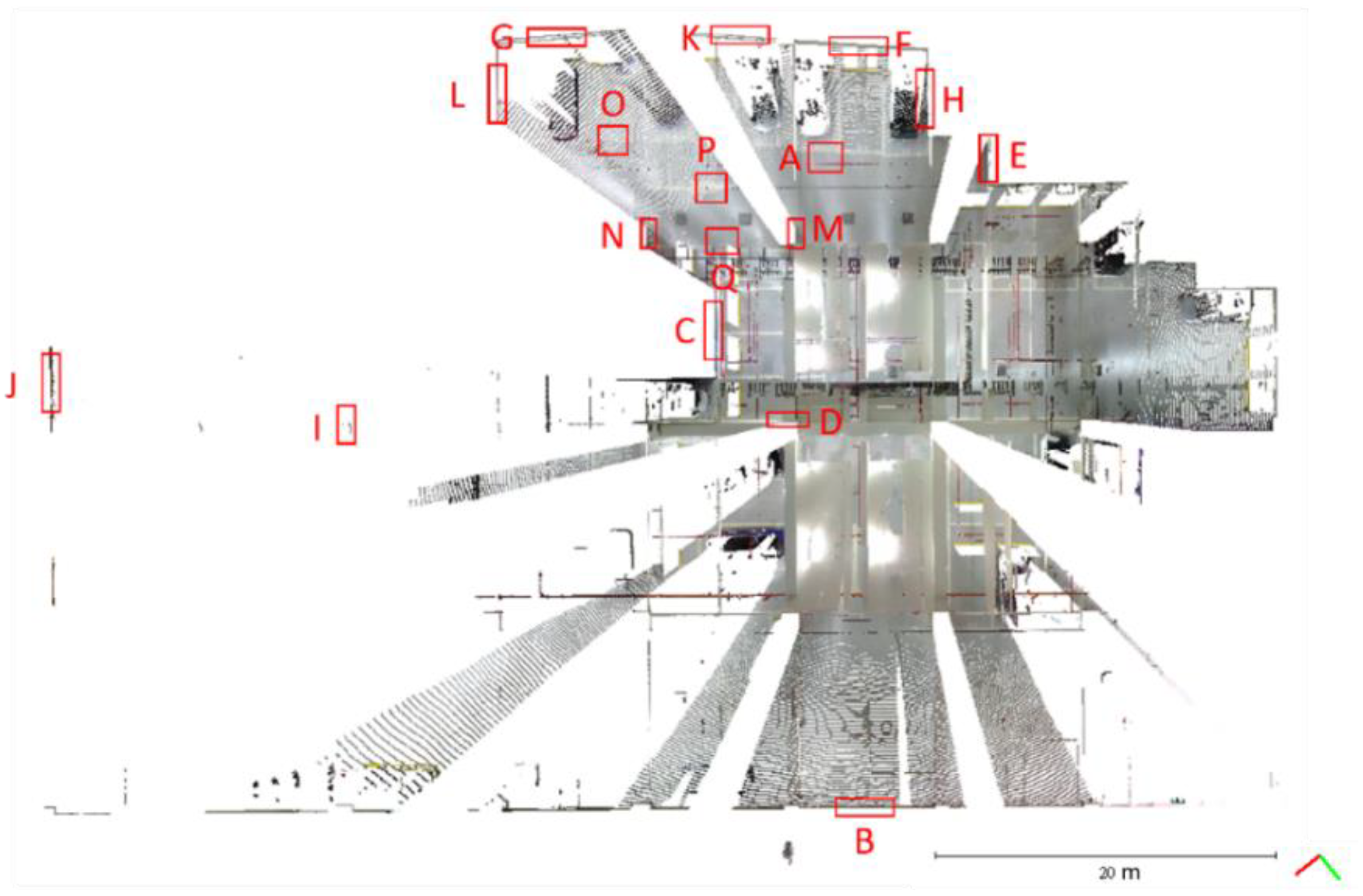
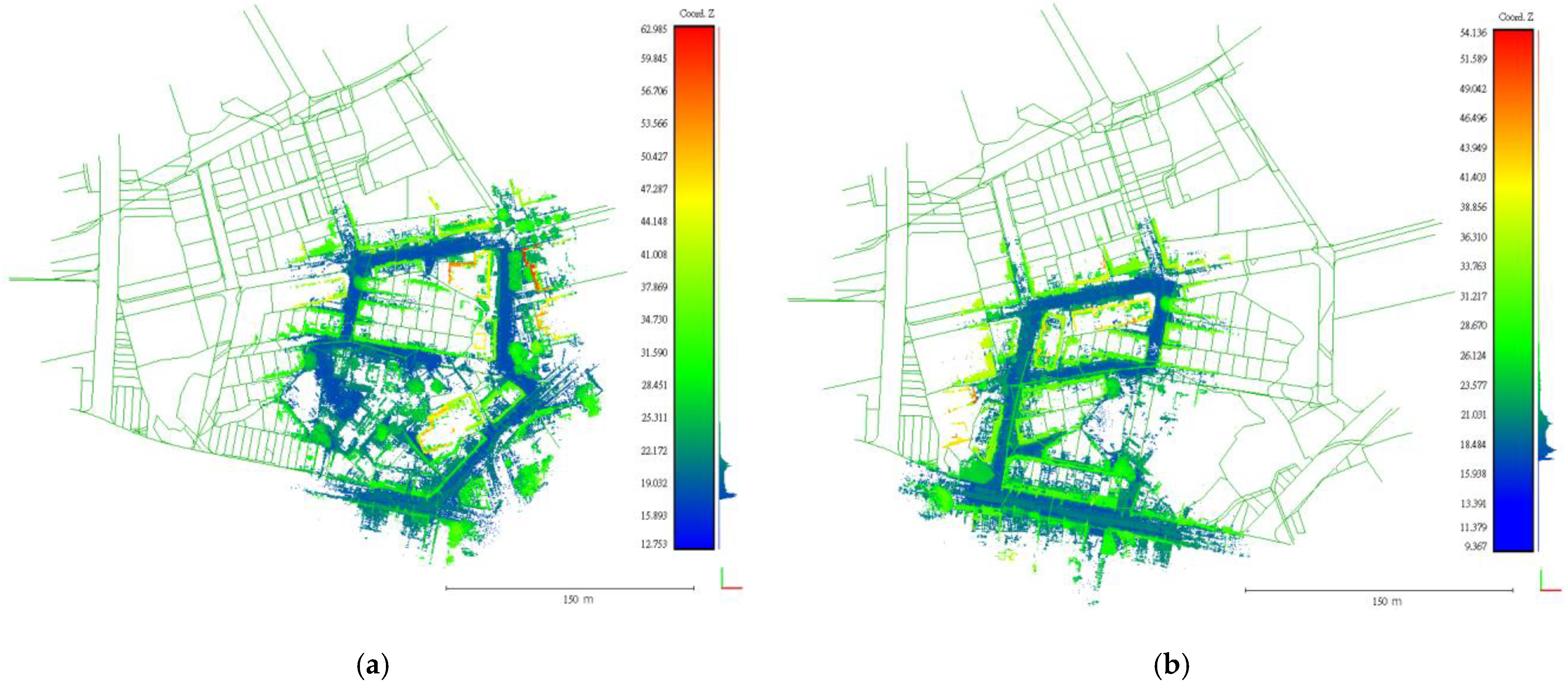
3.3.3. Point Cloud Filtering, System Error Correction, and Coordinate Conversion
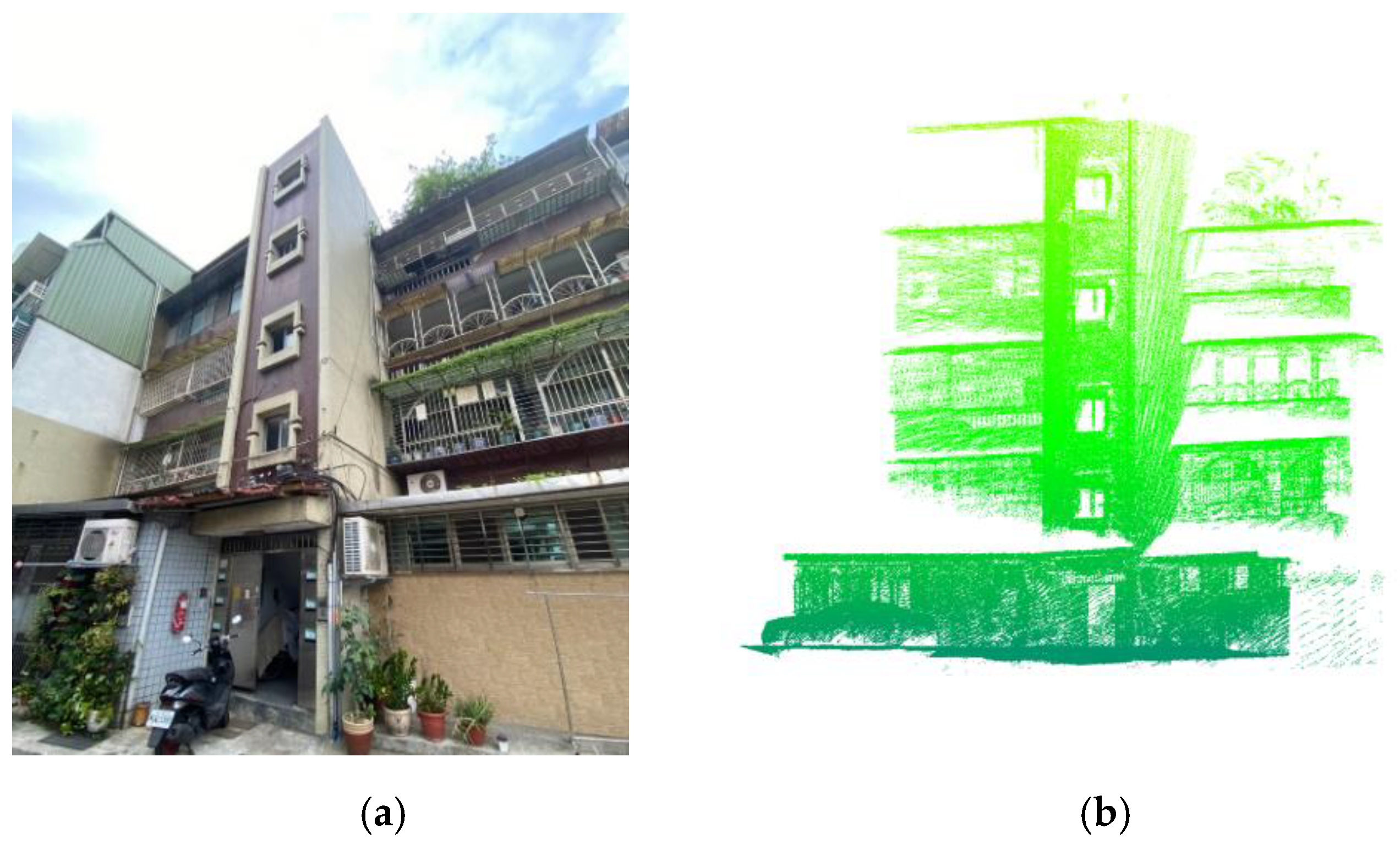
3.3.4. Urban Cadastral Detail Data Production
Detail Line Data by Manual Digitization
- Possible cadastral detail line on the boundary between townhouses
- Possible cadastral line on an existing road boundary
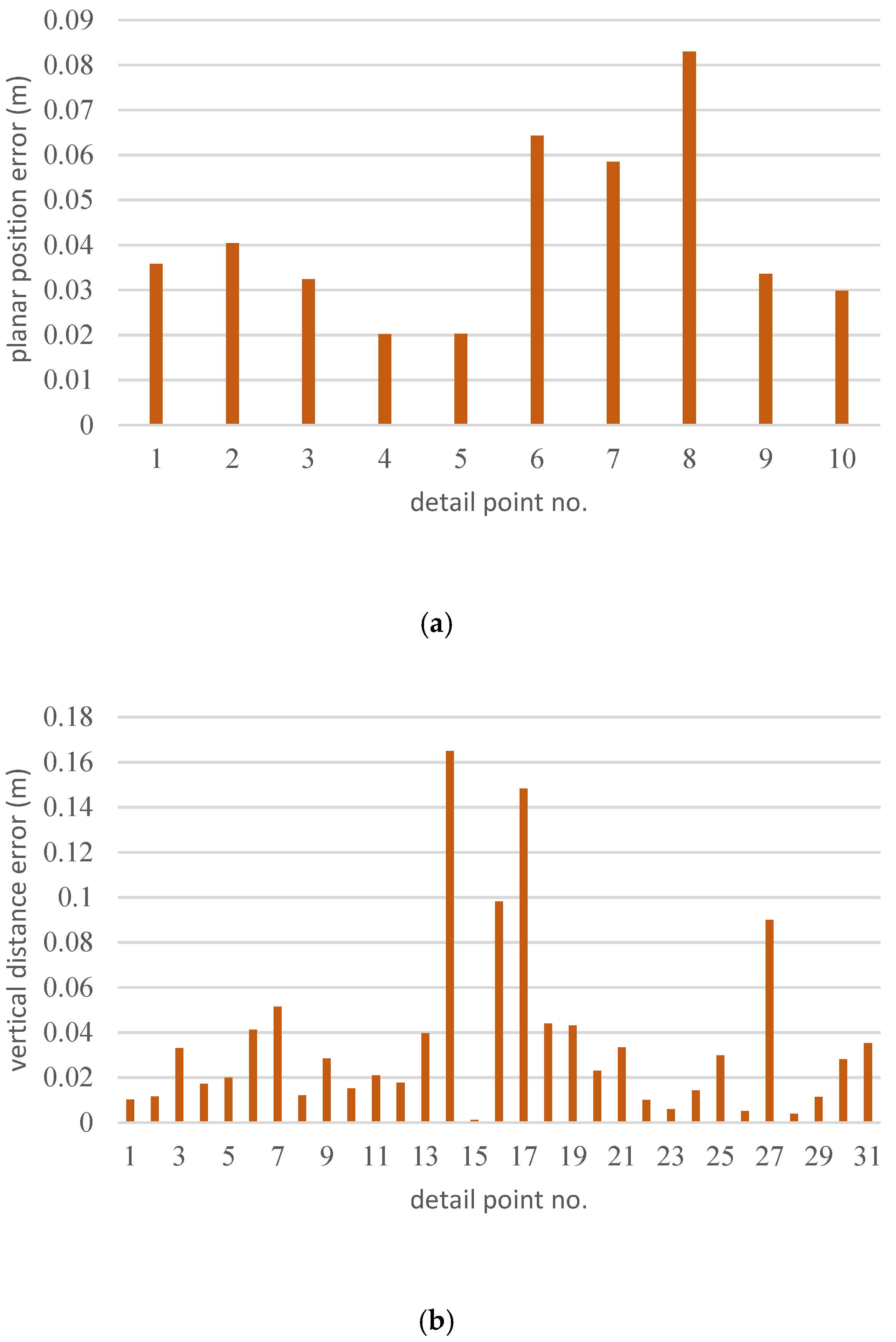
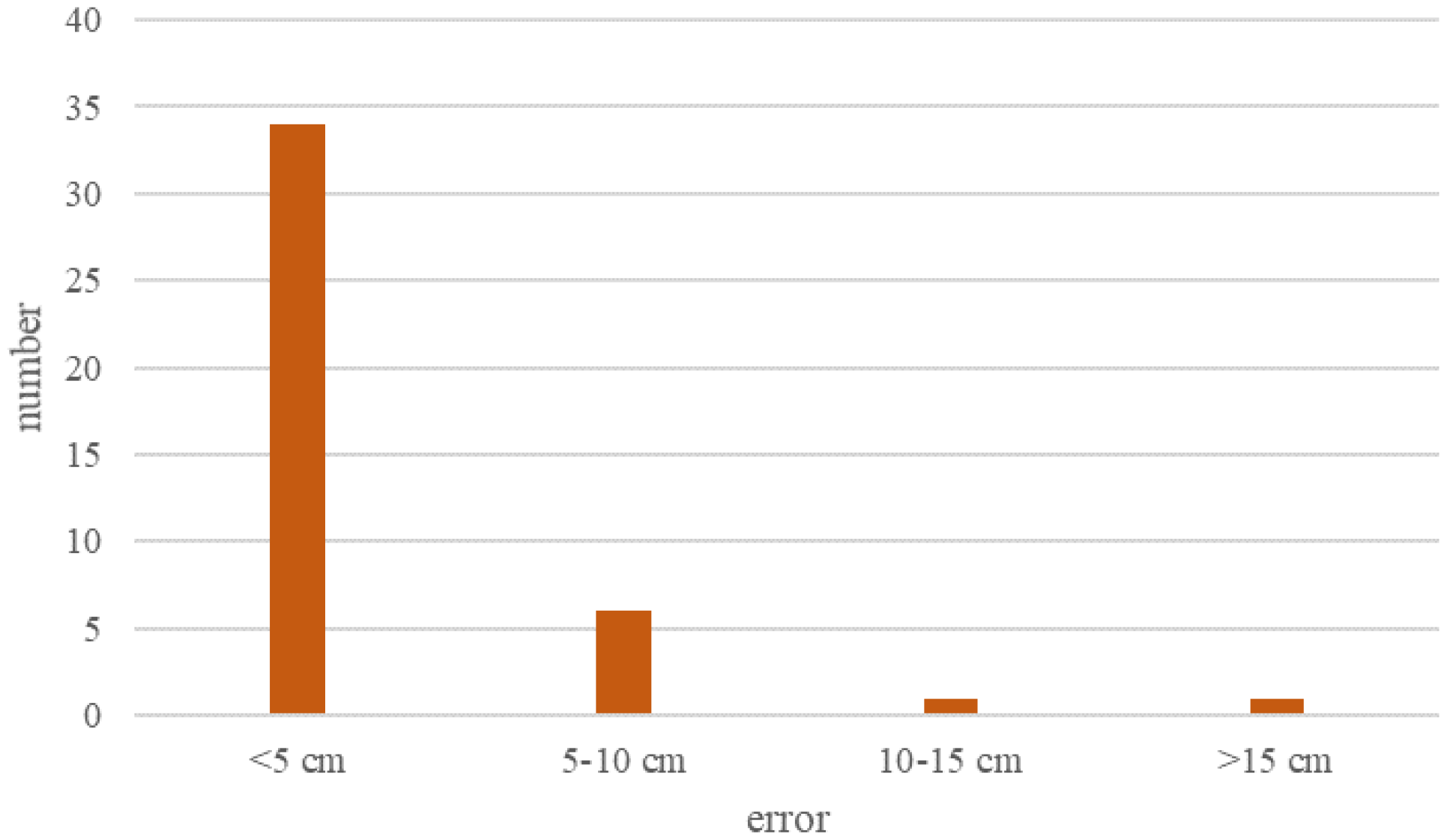
3.3.5. Results Analysis
- (1)
- Analysis of detail line data
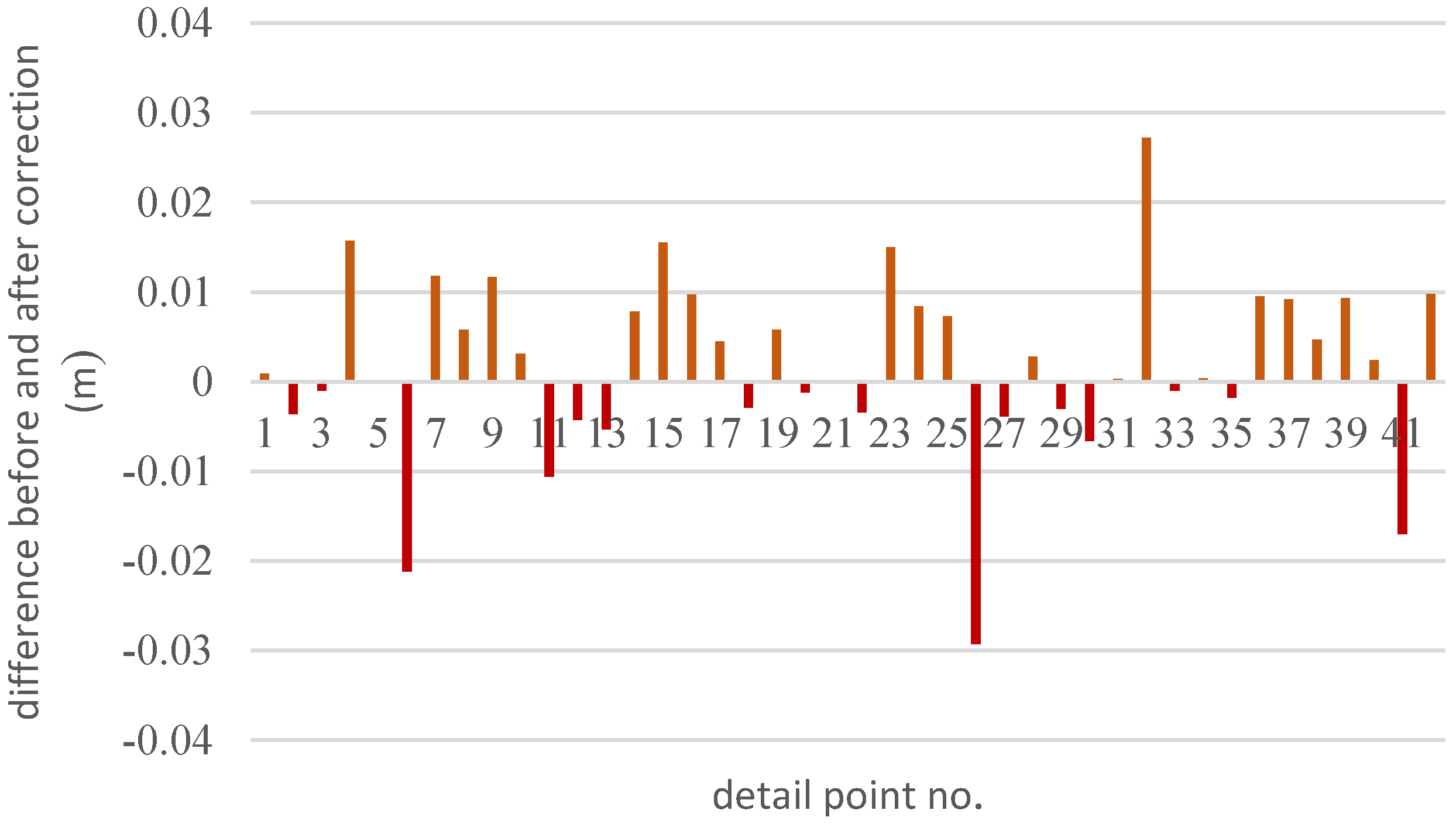
- (2)
- Analysis of the effect of ranging system error correction.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wu, T.P.; Kao, S.P.; Ning, F.S. Study on Computer Registering for Land Revision of Digitalized Graphic Maps. J. Cadastr. Surv. 2003, 22, 1–23. (In Chinese) [Google Scholar]
- Chio, S.-H.; Chiang, C.-C. Feasibility Study Using UAV Aerial Photogrammetry for a Boundary Verification Survey of a Digitalized Cadastral Area in an Urban City of Taiwan. Remote Sens. 2020, 12, 1682. [Google Scholar] [CrossRef]
- Park, J.; Lee, K.-W. Analysis of the Status of Mine and Methods of Mine Geospatial Information Construction Technology for Systematic Mine Management. J. Korea Acad.-Ind. Coop. Soc. 2018, 19, 355–361. [Google Scholar]
- Bosse, M.; Zlot, R. Continuous 3D scan-matching with a spinning 2D laser. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 4312–4319. [Google Scholar] [CrossRef]
- Bosse, M.; Zlot, R.; Flick, P. Zebedee: Design of a spring-mounted 3-D range sensor with application to mobile mapping. IEEE Trans. Robot. 2012, 28, 1104–1119. [Google Scholar] [CrossRef]
- Chen, S.; Liu, H.; Feng, Z.; Shen, C.; Chen, P. Applicability of personal laser scanning in forestry inventory. PLoS ONE 2019, 14, e0211392. [Google Scholar] [CrossRef] [PubMed]
- Mudicka, S.; Matolak, M.; Kapica, R.P. Application of handheld scanner in documentation of historical buildings. Sofia Surv. Geol. Min. Ecol. Manag. (SGEM) 2019, 10, 39–46. [Google Scholar]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest Inventory with Terrestrial LiDAR: A Comparison of Static and Hand-Held Mobile Laser Scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef] [Green Version]
- Park, J.K.; Um, D.Y. Application of Handheld Scanner to Investigate Diameter at Breast Height and Tree Height. Int. J. Mob. Device Eng. 2019, 3, 1. [Google Scholar] [CrossRef]
- Hunčaga, M.; Chudá, J.; Tomaštík, J.; Slámová, M.; Koreň, M.; Chudý, F. The Comparison of Stem Curve Accuracy Determined from Point Clouds Acquired by Different Terrestrial Remote Sensing Methods. Remote Sens. 2020, 12, 2739. [Google Scholar] [CrossRef]
- Dewez, T.; Plat, E.; Degas, M.; Richard, T.; Pannet, P.; Thuon, Y.; Meire, B.; Watelet, J.-M.; Cauvin, L.; Lucas, J. Handheld Mobile Laser Scanners Zeb-1 and Zeb-Revo to map an underground quarry and its above-ground surroundings. In Proceedings of the 2nd Virtual Geosciences Conference: VGC, Bergen, Norway, 21–23 September 2016. [Google Scholar]
- Chiabrando, F.; Sammartano, G.; Spanò, A. A Comparison among Different Optimization Levels in 3D Multi-Sensor Models: A Test Case in Emergency Context: 2016. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W3, 155–162. [Google Scholar] [CrossRef] [Green Version]
- Makkonen, T.; Heikkilä, R.; Kaaranka, A.; Naatsaari, M. The Applicability of the Rapid Handheld Laser Scanner to Underground Tunnel Surveying. In Proceedings of the 32nd International Symposium on Automation and Robotics in Construction, Oulu, Finland, 15–18 June 2015. [Google Scholar]
- James, M.R.; Quinton, J.N. Ultra-rapid topographic surveying for complex environments: The hand-held mobile laser scanner (HMLS). Earth Surf. Process. Landf. 2014, 39, 138–142. [Google Scholar] [CrossRef] [Green Version]
- Sršan, A. Mogućnosti Primjene GeoSLAM Tehnologije za Izmjeru Zatvorenih Prostora. Undergraduate Thesis, Polytechnic of Međimurje in Čakovec, Čakovec, Croatia, 2019. Available online: https://urn.nsk.hr/urn:nbn:hr:110:324934 (accessed on 2 December 2021).
- Hou, K.-W.; Chio, S.-H. Plane-based range calibration method for geoslam zeb-horizon handheld lidar instrument. In Proceedings of the International Symposium on Remote Sensing (ISRS) (ISRS 2021), Virtual Conference, 26–28 May 2021. [Google Scholar]
- Glennie, C.; Lichti, D.D. Static Calibration and Analysis of the Velodyne HDL-64E S2 for High Accuracy Mobile Scanning. Remote Sens. 2010, 2, 1610–1624. [Google Scholar] [CrossRef] [Green Version]
- Glennie, C. Calibration and Kinematic Analysis of the Velodyne HDL-64E S2 Lidar Sensor. Photogramm. Eng. Remote Sens. 2012, 78, 339–347. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with application to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Chan, T.; Lichti, D.D.; Roesler, G.; Cosandier, D.; Durgham, K. Range scale-factor calibration of the velodyne vlp-16 lidar system for position tracking applications. In Proceedings of the 11th International Conference on Mobile Mapping, Shenzhen, China, 6–8 May 2019; Volume 70–77, pp. 350–355. [Google Scholar]
- Moritz, H. Advanced Least-Squares Methods; Reports of the Department of Geodetic Science, Report No. 175; Ohio State University Research Foundation: Columbus, OH, USA, 1972. [Google Scholar]
- Ruffhead, A. An introduction to least-squares collocation. Surv. Rev. 1987, 29, 85–94. [Google Scholar] [CrossRef]
- Jana, Š. Testování Přístroje GeoSLAM ZEB-REVO RT. Master’s Thesis, Czech Technical University in Prague, Prague, Czech Republic, 2020. [Google Scholar]
- Maboudi, M.; Bánhidi, D.; Gerke, M. Evaluation of indoor mobile mapping systems. In Proceedings of the GFaI Workshop 3D North East, Berlin, Germany, 7–8 December 2017. [Google Scholar]
- Russhakim, N.; Mohd Ariff, M.F.; Darwin, N.; Majid, Z.M.; Idris, K.; Abbas, M.; Zainuddin, K.; Yusoff, A. The suitability of terrestrial laser scanning for strata building. ISPRS—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 67–76. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 | Range: 0.6–350 m |
| High Dynamic Range (HDR) Photo Recording 2×/3×/5× | |
| Measurement Speed: up to 976,000 points/s | |
| Ranging Error: ±1 mm | |
| Sealed Design—Ingress Protection (IP) Rating Class 54 | |
| On-site Compensation | |
| Accessory Bay | |
| Angular Accuracy: 19 arc sec for vertical/horizontal angles |
 | Technical specification | |
| Handheld | Backpack | UAV Ready | ||
| Range | 100 m | |
| Protection Class | IP54 | |
| Scanner Weight | 1.3 kg | |
| Points per Second | 300,000 | |
| Relative Accuracy | 1–3 cm | |
| Raw Data File Size | 100–200 MB a minute | |
| Processing | Point Processing | |
| Battery Life | 3.5 hrs | |
| Plane | a | b | c | d | Fitting RMSE (m) | |
|---|---|---|---|---|---|---|
| A | 0.012 | 0.007 | 0.999 | −44.416 | 0.0009 | 0 |
| B | 0.982 | 0.190 | 0.002 | −23.319 | 0.0009 | 89 |
| C | −0.196 | 0.981 | −0.001 | 9.670 | 0.0008 | 89 |
| D | 0.982 | 0.190 | 0.001 | −1.516 | 0.0006 | 89 |
| E | −0.183 | 0.983 | −0.003 | −5.552 | 0.0008 | 89 |
| F | 0.993 | 0.121 | 0.002 | 19.513 | 0.0008 | 89 |
| G | 0.964 | 0.265 | 0.002 | 21.626 | 0.0006 | 89 |
| H | −0.193 | 0.981 | −0.002 | −2.357 | 0.0007 | 89 |
| I | −0.194 | 0.981 | 0.001 | 30.209 | 0.0006 | 89 |
| J | −0.191 | 0.982 | 0.001 | 46.958 | 0.0010 | 89 |
| K | 0.994 | 0.112 | 0.003 | 19.384 | 0.0009 | 89 |
| L | −0.189 | 0.982 | −0.005 | 22.097 | 0.0006 | 89 |
| M | −0.191 | 0.982 | −0.001 | 5.064 | 0.0008 | 89 |
| N | −0.187 | 0.982 | −0.004 | 13.458 | 0.0005 | 89 |
| O | −0.004 | 0.005 | 0.999 | −44.549 | 0.0009 | 0 |
| P | −0.003 | −0.002 | 0.999 | −44.667 | 0.0006 | 0 |
| Q | 0.002 | 0.003 | 0.999 | −44.545 | 0.0010 | 0 |
| Filter Condition | Plane Fitting RMSE (m) | Number of Points | Filtering Points |
|---|---|---|---|
| None | 0.0110 | 21,650 | ------ |
| SLAM quality | 0.0108 | 13,525 | 8125 |
| Incidence angle | 0.0108 | 19,620 | 2024 |
| SLAM quality and incidence angle | 0.0106 | 12,969 | 8678 |
| Plane | No. of Point before/after | Calculated Pseudo-Ranging Measurement (m) | |||
|---|---|---|---|---|---|
| Minimum before/after | Maximum before/after | Median before/after | Average before/after | ||
| A | 3024/586 | 2.012/2.043 | 4.166/4.043 | 2.714/2.715 | 2.745/2.738 |
| B | 233/211 | 34.100/34.100 | 37.353/37.230 | 35.474/34.982 | 35.444/35.313 |
| C | 660/595 | 6.953/6.953 | 9.137/9.137 | 8.137/8.146 | 8.138/8.138 |
| D | 613/567 | 12.471/12.471 | 15.977/15.919 | 13.775/13.768 | 13.962/13.923 |
| E | 322/297 | 9.226/9.226 | 10.454/10.328 | 9.495/9.474 | 9.737/9.691 |
| F | 862/593 | 8.713/8.735 | 13.018/12.964 | 9.125/9.125 | 9.347/9.337 |
| G | 847/579 | 8.846/8.846 | 18.200/18.200 | 10.954/10.696 | 11.536/11.449 |
| H | 1420/581 | 7.832/7.860 | 11.380/11.380 | 9.227/9.161 | 9.354/9.317 |
| I | 80/58 | 22.515/22.515 | 28.518/28.518 | 24.317/24.350 | 24.985/25.192 |
| J | 91/62 | 39.675/39.757 | 45.099/45.099 | 41.515/41.605 | 41.833/41.836 |
| K | 1595/592 | 7.916/7.919 | 12.618/12.618 | 8.396/8.357 | 9.029/8.949 |
| L | 864/569 | 9.722/9.722 | 20.655/20.655 | 15.538/14.993 | 15.484/15.391 |
| M | 1110/599 | 2.310/2.310 | 2.909/2.906 | 2.542/2.536 | 2.546/2.542 |
| N | 1417/562 | 3.333/3.555 | 10.170/10.170 | 5.961/5.987 | 6.335/6.391 |
| O | 818/600 | 2.695/2.695 | 12.473/12.473 | 3.485/3.493 | 3.722/3.706 |
| P | 2119/599 | 1.456/1.466 | 7.881/7.295 | 2.082/2.088 | 2.342/2.348 |
| Q | 736/593 | 3.186/3.199 | 7.054/7.054 | 3.698/3.694 | 3.873/3.866 |
| Plane | RANSAC Results | Number of Outliers | Outliers % |
|---|---|---|---|
| A |  | 14 | 2.33% |
| B |  | 22 | 9.44% |
| C |  | 5 | 0.83% |
| D |  | 33 | 5.5% |
| E |  | 25 | 7.76% |
| F |  | 7 | 1.17% |
| G |  | 21 | 3.5% |
| H |  | 19 | 3.17% |
| I |  | 22 | 27.5% |
| J |  | 19 | 20.88% |
| K |  | 8 | 1.33% |
| L |  | 31 | 5.17% |
| M |  | 1 | 0.17% |
| N |  | 38 | 6.33% |
| O |  | 0 | 0% |
| P |  | 1 | 0.17% |
| Q |  | 7 | 1.17% |
| Check Plane | Difference (m) | Improvement (%) | ||
|---|---|---|---|---|
| C | 0.0121 | 0.0125 | 0.0004 | 2.98% |
| E | 0.0129 | 0.0290 | 0.0161 | 55.35% |
| F | 0.0092 | 0.0329 | 0.0237 | 72.12% |
| I | 0.0236 | 0.0287 | 0.0051 | 17.75% |
| K | 0.0083 | 0.0164 | 0.0081 | 49.25% |
| M | 0.0057 | 0.0105 | 0.0048 | 45.27% |
| N | 0.0102 | 0.0118 | 0.0016 | 13.82% |
| P | 0.0066 | 0.0069 | 0.0003 | 4.32% |
| Mean | 0.0111 | 0.0186 | 0.0075 | 32.61% |
| S | C | |||||||
|---|---|---|---|---|---|---|---|---|
| S | 1 | −0.82 | −0.68 | 0.65 | −0.04 | −0.06 | 0.12 | −0.61 |
| C | −0.82 | 1 | 0.30 | −0.28 | 0.08 | 0.06 | −0.14 | 0.23 |
| Distance | 1 | 2 | 5 | 10 | 20 | 30 | 40 |
|---|---|---|---|---|---|---|---|
| Distance after correction | 0.99 | 1.99 | 4.99 | 9.99 | 19.98 | 29.98 | 39.98 |
| Point No. | N Coordinate (m) | E Coordinate (m) | Ortho-Height (m) |
|---|---|---|---|
| 1 | 2,764,678.099 | 308,072.529 | 17.996 |
| 2 | 2,764,693.030 | 308,157.005 | 18.589 |
| NA0591 | 2,764,668.076 | 307,997.099 | 18.491 |
| 100005 | 2,764,569.887 | 307,967.553 | 17.213 |
| NA0657 | 2,764,853.892 | 308,221.181 | 19.417 |
| GA0477 | 2,764,471.261 | 308,372.474 | 18.782 |
| QT77 | 2,764,538.592 | 308,073.022 | 18.017 |
| NA0587 | 2,764,532.553 | 308,106.479 | 17.991 |
| Filtering Condition | Thresholds |
|---|---|
| SLAM quality | R ≤ 50 & G ≤ 50 & B ≥ 250 |
| Incident angle | ≤70° |
| Scanning distance | 50 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chio, S.-H.; Hou, K.-W. Application of a Hand-Held LiDAR Scanner for the Urban Cadastral Detail Survey in Digitized Cadastral Area of Taiwan Urban City. Remote Sens. 2021, 13, 4981. https://doi.org/10.3390/rs13244981
Chio S-H, Hou K-W. Application of a Hand-Held LiDAR Scanner for the Urban Cadastral Detail Survey in Digitized Cadastral Area of Taiwan Urban City. Remote Sensing. 2021; 13(24):4981. https://doi.org/10.3390/rs13244981
Chicago/Turabian StyleChio, Shih-Hong, and Kai-Wen Hou. 2021. "Application of a Hand-Held LiDAR Scanner for the Urban Cadastral Detail Survey in Digitized Cadastral Area of Taiwan Urban City" Remote Sensing 13, no. 24: 4981. https://doi.org/10.3390/rs13244981
APA StyleChio, S.-H., & Hou, K.-W. (2021). Application of a Hand-Held LiDAR Scanner for the Urban Cadastral Detail Survey in Digitized Cadastral Area of Taiwan Urban City. Remote Sensing, 13(24), 4981. https://doi.org/10.3390/rs13244981