
Mapping Grasslands in Mixed Grassland Ecoregion of Saskatchewan Using Big Remote Sensing Data and Machine Learning



Abstract
:1. Introduction
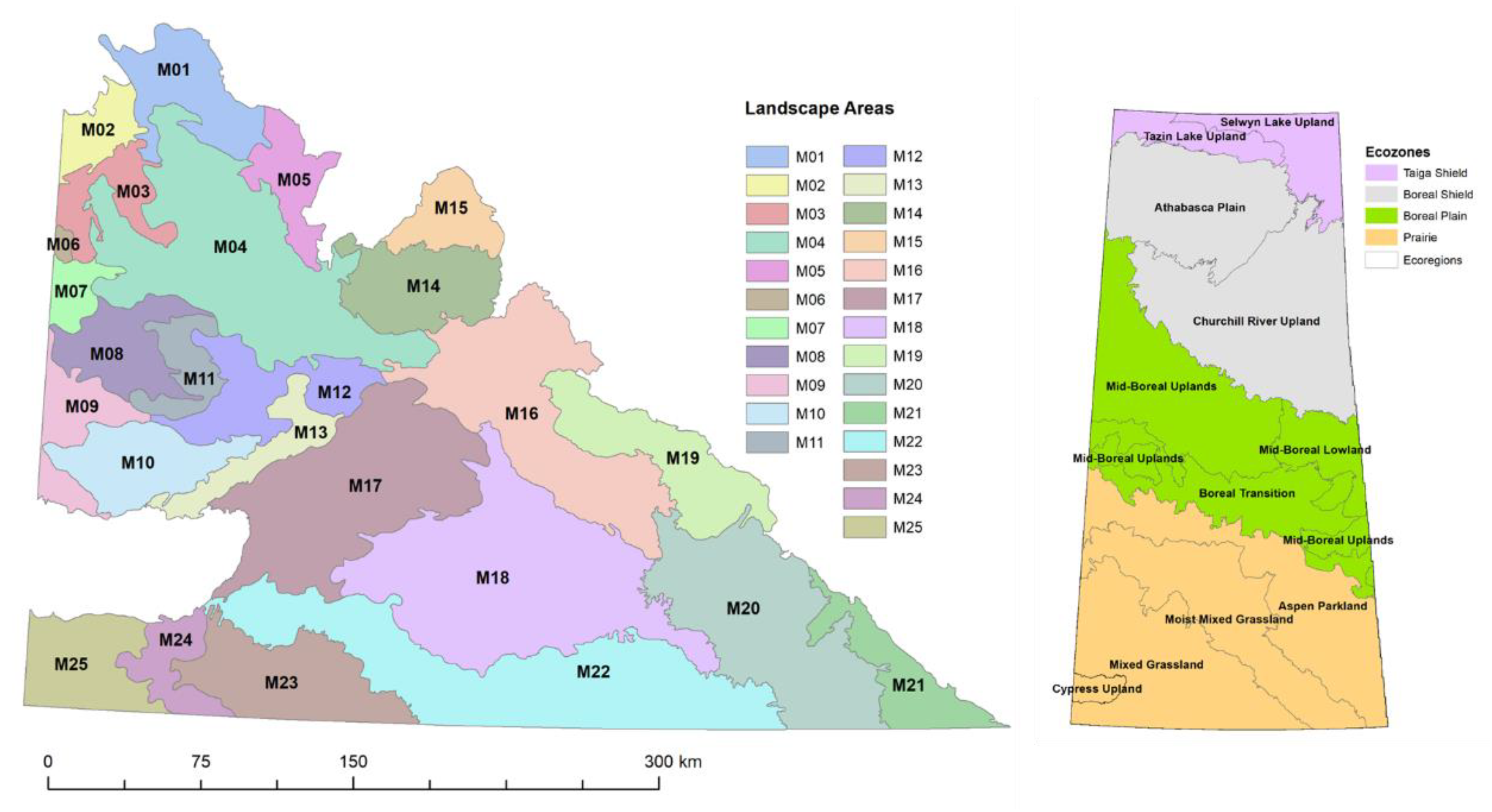
2. Case Study
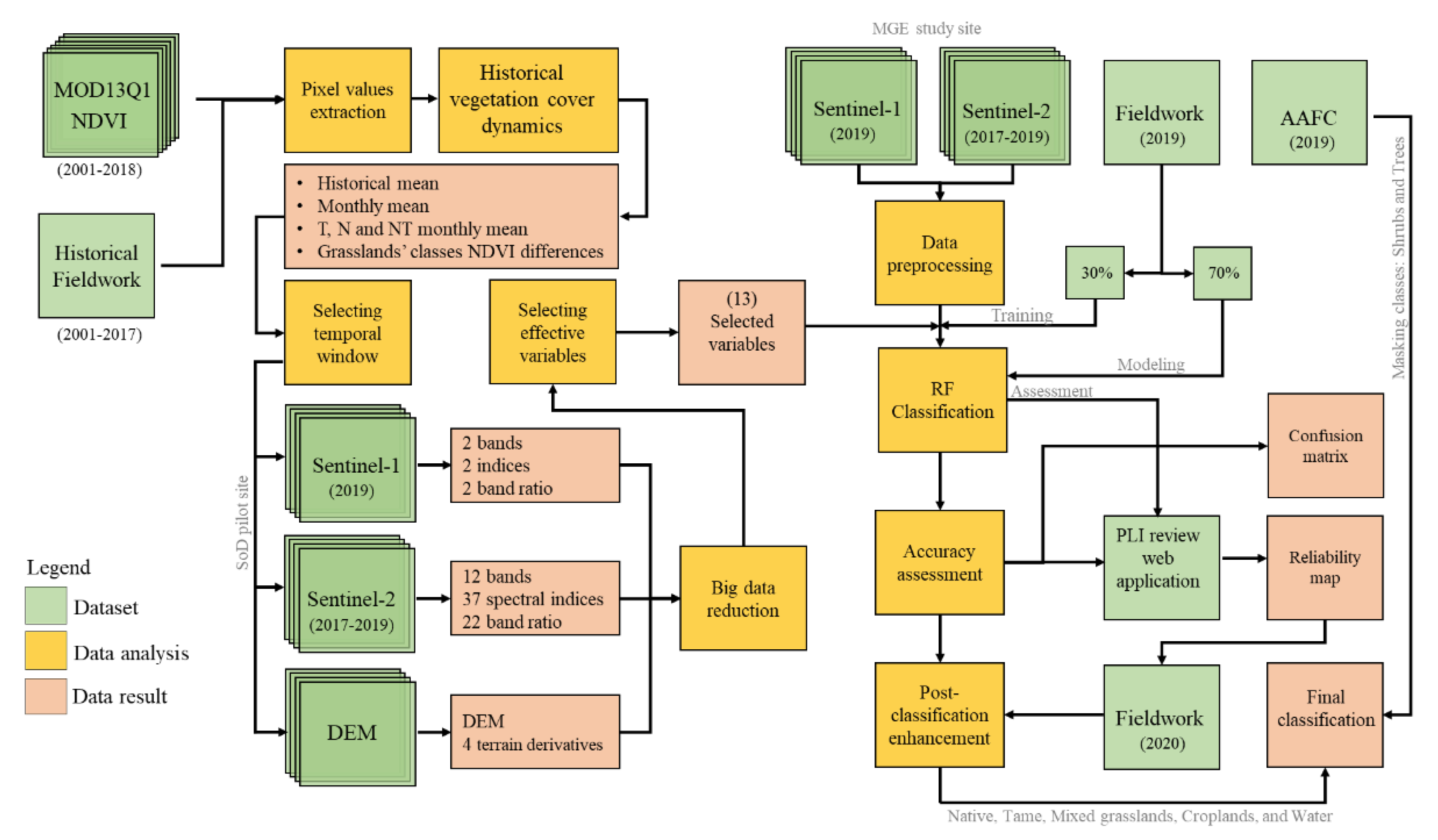
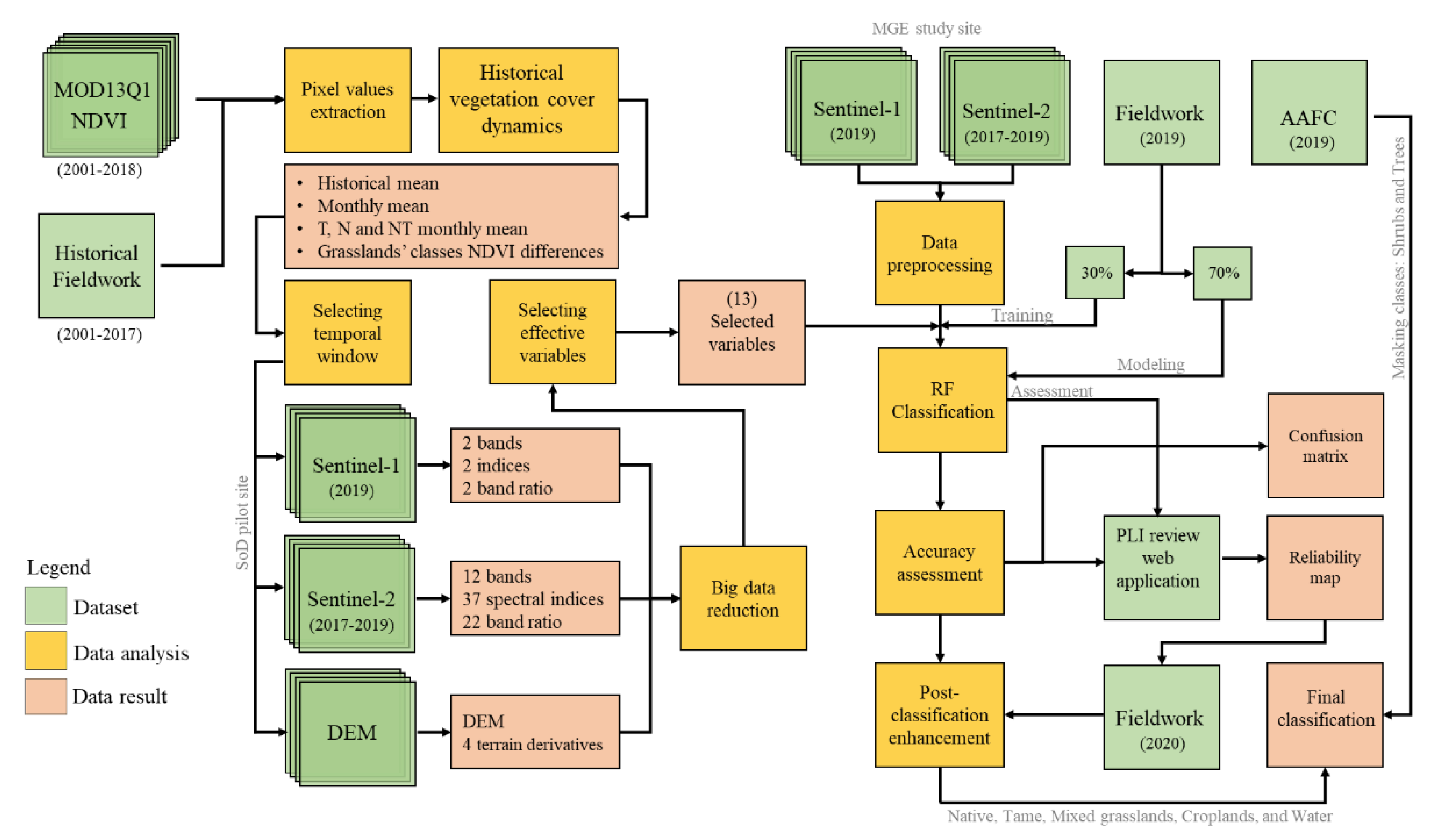
3. Materials and Methods
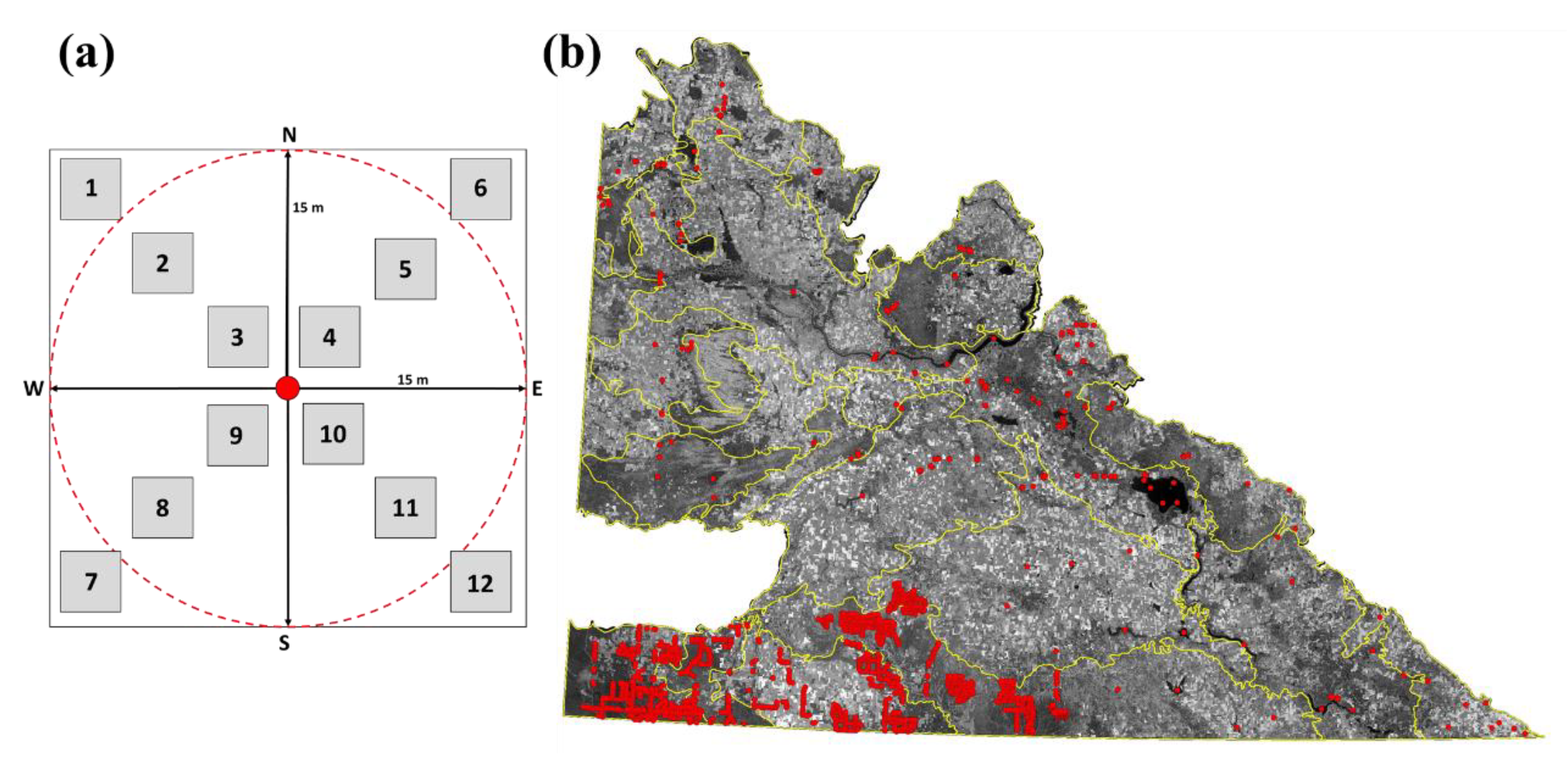
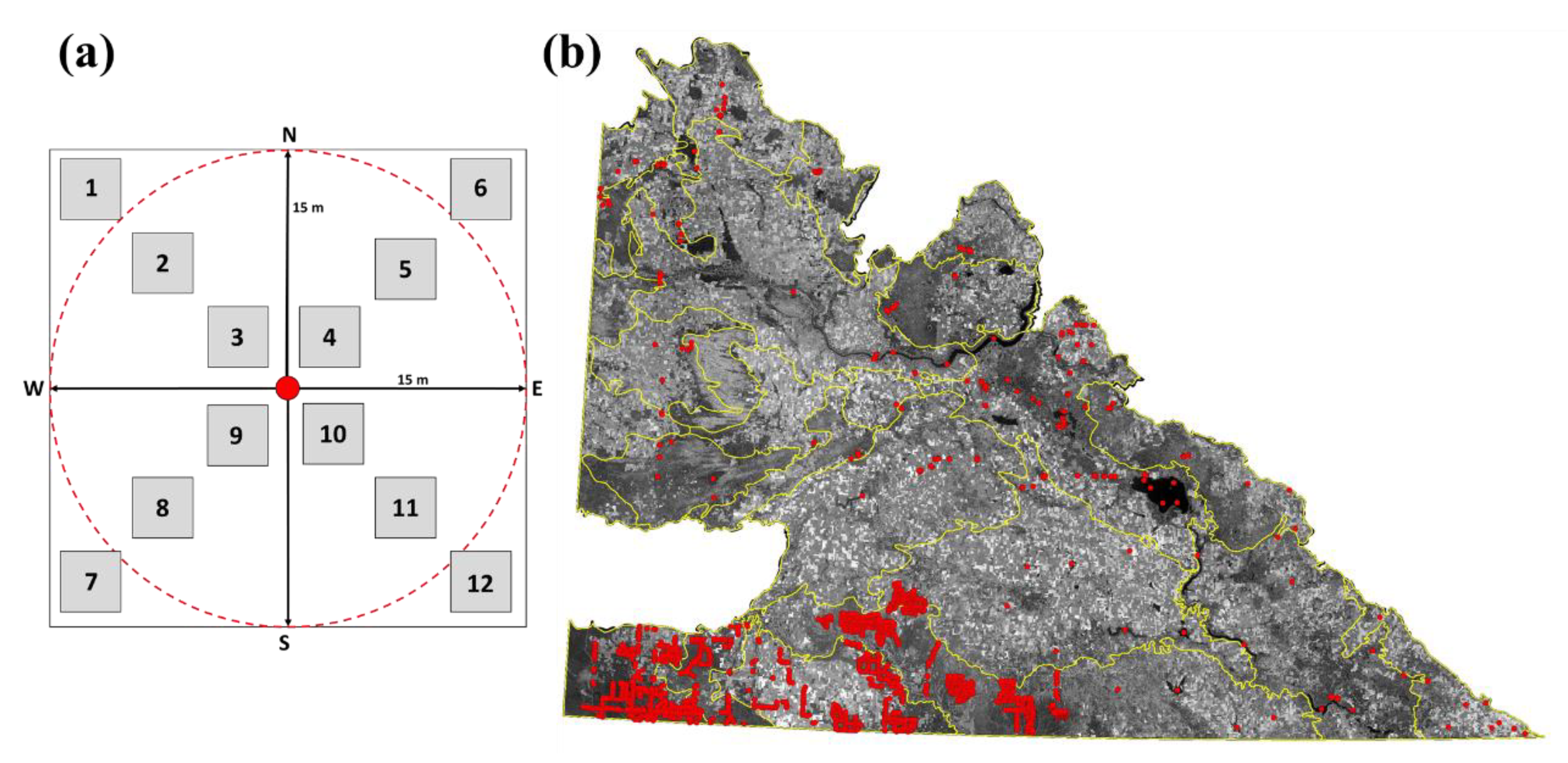
3.1. Ground-Truthing
3.2. Big Data Reduction
3.2.1. Temporal Window Selection
3.2.2. Effective Variables Selection
3.3. Data Acquisition and Preprocessing
3.4. Random Forest (RF) Classification
3.5. Accuracy Assessment
4. Results
4.1. Modeling Setup and Assessment Metrics
4.2. Grassland Spatial Distribution
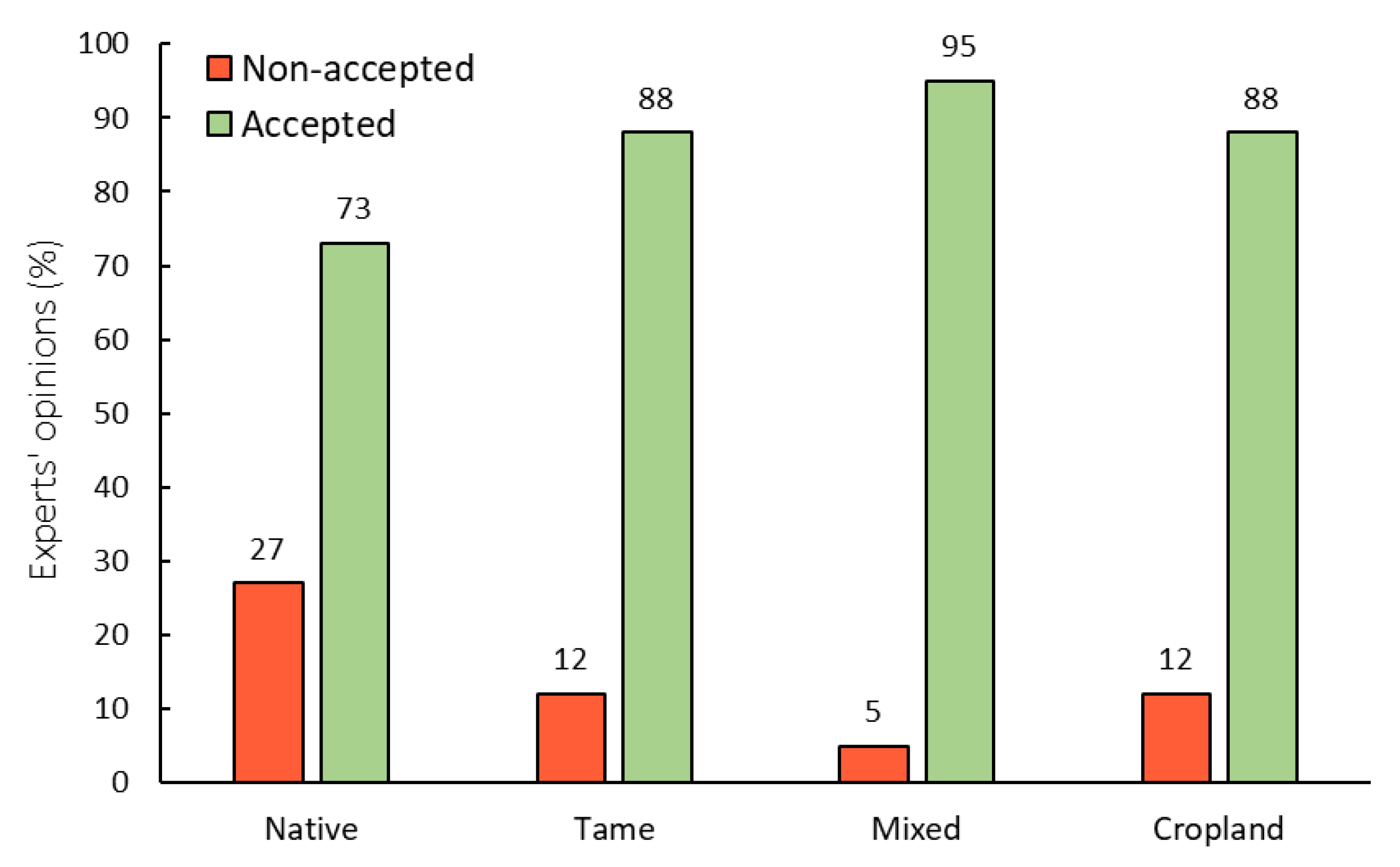
4.3. MGE’s Landscape-Based Grasslands
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Name | Formula | Reference |
|---|---|---|---|
| NDVI | Normalized difference vegetation index | [53,54] | |
| SAVI | Soil-adjusted vegetation index | [55] | |
| GNDVI | Green Normalized Difference Vegetation Index | [56] | |
| MCARI | Modified Chlorophyll Absorption in Reflectance Index | [56] | |
| PVI | Perpendicular Vegetation Index | [57] | |
| IRECI | The Inverted Red-Edge Chlorophyll Index | [58] | |
| S2REP | The Sentinel-2 Red-Edge Position Index | [59] | |
| MTCI | The Meris Terrestrial Chlorophyll Index | [60] | |
| ARVI | The Atmospherically Resistant Vegetation Index | [61] | |
| EVI | Enhanced Vegetation Index | [62] | |
| EVI-2 | Enhanced Vegetation Index 2 | [63] | |
| Chlred-edge | Chlorophyll Red-Edge | [64] | |
| EPI | EPI | [65] | |
| IVI | Ideal vegetation index | [66] | |
| LCI | Leaf Chlorophyll Index | [67,68] | |
| GVI | Tasselled Cap-vegetation | [69,70,71] | |
| WDRVI | Wide Dynamic Range Vegetation Index | [72,73] | |
| SLAVI | Specific Leaf Area Vegetation Index | [74] | |
| SIPI3 | Structure Intensive Pigment Index 3 | [68,75] | |
| YVIMSS | Tasselled Cap-Yellow Vegetation Index MSS | [70,76] | |
| NDII | Normalized Difference 819/1600 | [77,78] | |
| PNDVI | Pan NDVI | [79] | |
| RDVI | RDVI | [80] | |
| SCI | Soil Composition Index | [81] | |
| MSBI | Misra Soil Brightness Index | [82] | |
| BI2 | The second Brightness Index algorithm | [83] | |
| BI | The Brightness Index algorithm | [84] | |
| SBL | Soil Background Line | [57] | |
| NDSI | Normalized Difference Salinity Index | [81] | |
| MNDWI | the Modified Normalized Difference Water Index (MDNWI) | [85] | |
| NDWI | normalized difference water index | [86] | |
| NDWI2 | The second Normalized Difference Water Index algorithm | [85] | |
| NDPI | The Normalized Difference Pond Index | [87] |

References
- Thorpe, J.; Wolfe, S.A.; Houston, B. Potential Impacts of Climate Change on Grazing Capacity of Native Grasslands in the Canadian Prairies. Can. J. Soil Sci. 2008, 88, 595–609. [Google Scholar] [CrossRef]
- Gauthier, D.A.; Wiken, E.D.B. Monitoring the Conservation of Grassland Habitats, Prairie Ecozone, Canada. Environ. Monit. Assess. 2003, 88, 343–364. [Google Scholar] [CrossRef]
- Hoekstra, J.M.; Boucher, T.M.; Ricketts, T.H.; Roberts, C. Confronting a Biome Crisis: Global Disparities of Habitat Loss and Protection. Ecol. Lett. 2004, 8, 23–29. [Google Scholar] [CrossRef]
- Stephens, S.E.; Walker, J.A.; Blunck, D.R.; Jayaraman, A.; Naugle, D.E.; Ringelman, J.K.; Smith, A.J. Predicting Risk of Habitat Conversion in Native Temperate Grasslands. Conserv. Biol. 2008, 22, 1320–1330. [Google Scholar] [CrossRef]
- Fisher, R.J.; Sawa, B.; Prieto, B. A Novel Technique Using LiDAR to Identify Native-Dominated and Tame-Dominated Grasslands in Canada. Remote Sens. Environ. 2018, 218, 201–206. [Google Scholar] [CrossRef]
- Brooks, T.M.; Mittermeier, R.A.; Mittermeier, C.G.; da Fonseca, G.A.B.; Rylands, A.B.; Konstant, W.R.; Flick, P.; Pilgrim, J.; Oldfield, S.; Magin, G.; et al. Habitat Loss and Extinction in the Hotspots of Biodiversity. Conserv. Biol. 2002, 16, 909–923. [Google Scholar] [CrossRef] [Green Version]
- Looman, J. Preliminary Classification of Grasslands in Saskatchewan. Ecology 1963, 44, 15–29. [Google Scholar] [CrossRef]
- Coupland, R.T.; Brayshaw, T.C. The Fescue Grassland in Saskatchewan. Ecology 1953, 34, 386–405. [Google Scholar] [CrossRef]
- Amichev, B.Y.; Bentham, M.J.; Kulshreshtha, S.N.; Laroque, C.P.; Piwowar, J.M.; van Rees, K.C.J. Carbon Sequestration and Growth of Six Common Tree and Shrub Shelterbelts in Saskatchewan, Canada. Can. J. Soil Sci. 2016, 97, 368–381. [Google Scholar] [CrossRef]
- Hammermeister, A.; Gauthier, D.; McGovern, K. Saskatchewan’s Native Prairie: Statistics of a Vanishing Ecosystem and Dwindling Resource; Native Plant Society of Saskatchewan Inc.: Saskatoon, SK, Canada, 2001. [Google Scholar]
- Fisette, T.; Rollin, P.; Aly, Z.; Campbell, L.; Daneshfar, B.; Filyer, P.; Smith, A.; Davidson, A.; Shang, J.; Jarvis, I. AAFC Annual Crop Inventory: Status and Challenges. In Proceedings of the Second International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Fairfax, VA, USA, 12–16 August 2013; pp. 270–274. [Google Scholar] [CrossRef]
- Ali, I.; Cawkwell, F.; Dwyer, E.; Barrett, B.; Green, S. Satellite Remote Sensing of Grasslands: From Observation to Management. J. Plant Ecol. 2016, 9, 649–671. [Google Scholar] [CrossRef] [Green Version]
- Badreldin, N.; Xing, Z.; Goossens, R. The Application of Satellite-Based Model and Bi-Stable Ecosystem Balance Concept to Monitor Desertification in Arid Lands, a Case Study of Sinai Peninsula. Modeling Earth Syst. Environ. 2017, 3, 21. [Google Scholar] [CrossRef]
- Reinke, K.; Jones, S. Integrating Vegetation Field Surveys with Remotely Sensed Data. Ecol. Manag. Restor. 2006, 7, S18–S23. [Google Scholar] [CrossRef]
- Xie, Y.; Sha, Z.; Yu, M. Remote Sensing Imagery in Vegetation Mapping: A Review. J. Plant Ecol. 2008, 1, 9–23. [Google Scholar] [CrossRef]
- Kolecka, N.; Ginzler, C.; Pazur, R.; Price, B.; Verburg, P. Regional Scale Mapping of Grassland Mowing Frequency with Sentinel-2 Time Series. Remote Sens. 2018, 10, 1221. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Dragicevic, S.; Castro, F.A.; Sester, M.; Winter, S.; Coltekin, A.; Pettit, C.; Jiang, B.; Haworth, J.; Stein, A.; et al. Geospatial Big Data Handling Theory and Methods: A Review and Research Challenges. ISPRS J. Photogramm. Remote Sens. 2016, 115, 119–133. [Google Scholar] [CrossRef] [Green Version]
- Badreldin, N.; Abu Hatab, A.; Lagerkvist, C.J. Spatiotemporal Dynamics of Urbanization and Cropland in the Nile Delta of Egypt Using Machine Learning and Satellite Big Data: Implications for Sustainable Development. Environ. Monit. Assess. 2019, 191, 767. [Google Scholar] [CrossRef]
- Laney, D. Data Management: Controlling Data Volume, Velocity, and Variety. Appl. Deliv. Strateg. 2001, 6, 6. [Google Scholar]
- Suthaharan, S. Big Data Classification: Problems and Challenges in Network Intrusion Prediction with Machine Learning. ACM SIGMETRICS Perform. Eval. Rev. 2014, 41, 70–73. [Google Scholar] [CrossRef]
- Hogland, J.; Anderson, N. Function Modeling Improves the Efficiency of Spatial Modeling Using Big Data from Remote Sensing. Big Data Cogn. Comput. 2017, 1, 3. [Google Scholar] [CrossRef] [Green Version]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Brisco, B.; Homayouni, S.; Gill, E.; DeLancey, E.R.; Bourgeau-Chavez, L. Big Data for a Big Country: The First Generation of Canadian Wetland Inventory Map at a Spatial Resolution of 10-m Using Sentinel-1 and Sentinel-2 Data on the Google Earth Engine Cloud Computing Platform. Can. J. Remote Sens. 2020, 46, 15–33. [Google Scholar] [CrossRef]
- Acton, D.F.; Padbury, G.A.; Stushnoff, C.T. The Ecoregions of Saskatchewan; Saskatchewan Environment and Resource Management, Canadian Plains Research Center: Regina, SK, USA, 1998. [Google Scholar]
- Gauthier, D.A.; Patino, L.; McGovern, K. Status of Native Prairie Habitat, Prairie Ecozone, Saskatchewan; Project Report to Wildlife Habitat Canada, Number 8.65A.1R-01/02; Canadian Plains Research Centre: Regina, SK, USA, 2002; 355p. [Google Scholar]
- Janzen, H.H.; Campbell, C.A.; Izaurralde, R.C.; Ellert, B.H.; Juma, N.; McGill, W.B.; Zentner, R.P. Management Effects on Soil C Storage on the Canadian Prairies. Soil Tillage Res. 1998, 47, 181–195. [Google Scholar] [CrossRef]
- Thomas, A.F.; Thomas, E.B.; Chris, H.H. Successes of Soil Conservation in the Canadian Prairies Highlighted by a Historical Decline in Blowing Dust. Environ. Res. Lett. 2012, 7, 14008. [Google Scholar] [CrossRef]
- Bai, Y.; Abouguendia, Z.; Redmann, R.E. Relationship between Plant Species Diversity and Grassland Condition. Rangel. Ecol. Manag. /J. Range Manag. Arch. 2001, 54, 177–183. [Google Scholar]
- Didan, K. MOD13Q1 MODIS/Terra Vegetation Indices 16-Day L3 Global 1km SIN Grid V006; NASA EOSDIS LP DAAC: Sioux Falls, SD, USA, 2015. [Google Scholar] [CrossRef]
- Nitze, I.; Barrett, B.; Cawkwell, F. Temporal Optimisation of Image Acquisition for Land Cover Classification with Random Forest and MODIS Time-Series. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 136–146. [Google Scholar] [CrossRef] [Green Version]
- Didan, K.; Barreto Munoz, A.; Solano, R.; Huete, A. MODIS Vegetation Index User’s Guide (MOD13 Series); Vegetation Index and Phenology Lab, University of Arizona: Tucson, AZ, USA, 2015. [Google Scholar]
- Busetto, L.; Ranghetti, L. MODIStsp: An R Package for Automatic Preprocessing of MODIS Land Products Time Series. Comput. Geosci. 2016, 97, 40–48. [Google Scholar] [CrossRef] [Green Version]
- Petrovska, B.; Zdravevski, E.; Lameski, P.; Corizzo, R.; Štajduhar, I.; Lerga, J. Deep Learning for Feature Extraction in Remote Sensing: A Case-Study of Aerial Scene Classification. Sensors 2020, 20, 3906. [Google Scholar] [CrossRef] [PubMed]
- Clark, J.; Provost, F. Unsupervised Dimensionality Reduction versus Supervised Regularization for Classification from Sparse Data. Data Min. Knowl. Discov. 2019, 33, 871–916. [Google Scholar] [CrossRef] [Green Version]
- Khaled, A.Y.; Abd Aziz, S.; Khairunniza Bejo, S.; Mat Nawi, N.; Jamaludin, D.; Ibrahim, N.U.A. A Comparative Study on Dimensionality Reduction of Dielectric Spectral Data for the Classification of Basal Stem Rot (BSR) Disease in Oil Palm. Comput. Electron. Agric. 2020, 170, 105288. [Google Scholar] [CrossRef]
- Drusch, M.; del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Clerici, N.; Valbuena Calderón, C.A.; Posada, J.M. Fusion of Sentinel-1a and Sentinel-2A Data for Land Cover Mapping: A Case Study in the Lower Magdalena Region, Colombia. J. Maps 2017, 13, 718–726. [Google Scholar] [CrossRef] [Green Version]
- De Keukelaere, L.; Sterckx, S.; Adriaensen, S.; Knaeps, E.; Reusen, I.; Giardino, C.; Bresciani, M.; Hunter, P.; Neil, C.; van der Zande, D.; et al. Atmospheric Correction of Landsat-8/OLI and Sentinel-2/MSI Data Using ICOR Algorithm: Validation for Coastal and Inland Waters. Eur. J. Remote Sens. 2018, 51, 525–542. [Google Scholar] [CrossRef] [Green Version]
- Filipponi, F. Sentinel-1 GRD Preprocessing Workflow. Proceedings 2019, 18, 11. [Google Scholar] [CrossRef] [Green Version]
- Kwok, R. Ecology’s Remote-Sensing Revolution. Nature 2018, 556, 137–138. [Google Scholar] [CrossRef] [PubMed]
- Hajduch, G. Masking “No-Value” Pixels on GRD Products Generated by the Sentinel-1 ESA IPF; European Space Agency (ESA): Ramonville Saint-Agne, France, 2018. [Google Scholar]
- Lee, J.S.; Jurkevich, I.; Dewaele, P.; Wambacq, P.; Oosterlinck, A. Speckle Filtering of Synthetic Aperture Radar Images: A Review. Remote Sens. Rev. 1994, 8, 313–340. [Google Scholar] [CrossRef]
- Roy, D.P.; Li, J.; Zhang, H.K.; Yan, L. Best Practices for the Reprojection and Resampling of Sentinel-2 Multi Spectral Instrument Level 1C Data. Remote Sens. Lett. 2016, 7, 1023–1032. [Google Scholar] [CrossRef]
- De’Ath, G.; Fabricius, K.E. Classification and Regression Trees: A Powerful yet Simple Technique for Ecological Data Analysis. Ecology 2000, 81, 3178–3192. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Breiman and Cutler’s Random Forests for Classification and Regression. The Comprehensive R Archive Network (CRAN). 2018. Volume 29. Available online: http://math.furman.edu/~dcs/courses/math47/R/library/randomForest/html/00Index.html (accessed on 1 December 2021).
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Pal, M. Random Forest Classifier for Remote Sensing Classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Pontius, R.G.; Millones, M. Death to Kappa: Birth of Quantity Disagreement and Allocation Disagreement for Accuracy Assessment. Int. J. Remote Sens. 2011, 32, 4407–4429. [Google Scholar] [CrossRef]
- Foody, G.M. Explaining the Unsuitability of the Kappa Coefficient in the Assessment and Comparison of the Accuracy of Thematic Maps Obtained by Image Classification. Remote Sens. Environ. 2020, 239, 111630. [Google Scholar] [CrossRef]
- Olimb, S.K.; Dixon, A.P.; Dolfi, E.; Engstrom, R.; Anderson, K. Prairie or Planted? Using Time-Series NDVI to Determine Grassland Characteristics in Montana. GeoJournal 2017, 83, 819–834. [Google Scholar] [CrossRef]
- McInnes, W.S.; Smith, B.; McDermid, G.J. Discriminating Native and Nonnative Grasses in the Dry Mixedgrass Prairie with MODIS NDVI Time Series. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1395–1403. [Google Scholar] [CrossRef]
- Hickey, R. Slope Angle and Slope Length Solutions for GIS. Cartography 2000, 29, 1–8. [Google Scholar] [CrossRef]
- Mattivi, P.; Franci, F.; Lambertini, A.; Bitelli, G. TWI Computation: A Comparison of Different Open Source GISs. Open Geospat. Data Softw. Stand. 2019, 4, 1–12. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and Photographic Infrared Linear Combinations for Monitoring Vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Sellers, P.J. Canopy Reflectance, Photosynthesis and Transpiration. Int. J. Remote Sens. 1985, 6, 1335–1372. [Google Scholar] [CrossRef]
- Huete, A.R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; de Colstoun, E.B.; McMurtrey, J.E. Estimating Corn Leaf Chlorophyll Concentration from Leaf and Canopy Reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Richardson, A.J.; Wiegand, C.L. Distinguishing Vegetation from Soil Background Information. Photogramm. Eng. Remote Sens. 1977, 43, 1541–1552. [Google Scholar]
- Clevers, J.G.P.W.; De Jong, S.M.; Epema, G.F.; Addink, E.A. MERIS and The Red-Edge Index. In Proceedings of the Second EARSeL Workshop on Imaging Spectroscopy; Springer: Enschede, The Netherlands, 2000; p. 14. [Google Scholar]
- Guyot, G.; Baret, F. Utilisation de la haute resolution spectrale pour suivre l’etat des couverts vegetaux. In Proceedings of the 4th International Colloquium on Spectral Signatures of Objects in Remote Sensing, Aussois, France, 12–18 January 1988; pp. 279–286. [Google Scholar]
- Dash, J.; Curran, P.J. Evaluation of the MERIS Terrestrial Chlorophyll Index (MTCI). Adv. Space Res. 2007, 39, 100–104. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Tanre, D. Atmospherically Resistant Vegetation Index (ARVI) for EOS-MODIS. IEEE Trans. Geosci. Remote Sens. 1992, 30, 261–270. [Google Scholar] [CrossRef]
- Huete, A.R.; Justice, C.; van Leeuwen, W. MODIS Vegetation Index (MOD13); Algorithm Theoretical Basis Document (ATBD); Department of Environmental Sciences, University of Virginia: Tucson, AZ, USA, 1999. [Google Scholar]
- Miura, T.; Yoshioka, H.; Fujiwara, K.; Yamamoto, H. Inter-Comparison of ASTER and MODIS Surface Reflectance and Vegetation Index Products for Synergistic Applications to Natural Resource Monitoring. Sensors 2008, 8, 2480–2499. [Google Scholar] [CrossRef] [Green Version]
- Gitelson, A.A.; Keydan, G.P.; Merzlyak, M.N. Three-Band Model for Noninvasive Estimation of Chlorophyll, Carotenoids, and Anthocyanin Contents in Higher Plant Leaves. Geophys. Res. Lett. 2006, 33, L11402. [Google Scholar] [CrossRef] [Green Version]
- Datt, B. Remote Sensing of Chlorophyll a, Chlorophyll b, Chlorophyll A+b, and Total Carotenoid Content in Eucalyptus Leaves. Remote Sens. Environ. 1998, 66, 111–121. [Google Scholar] [CrossRef]
- Baret, F.; Guyot, G.; Major, D. TSAVI: A Vegetation Index Which Minimizes Soil Brightness Effects on LAI and APAR Estimation. In Proceedings of the 12th Canadian Symposium on Remote Sensing and IGARSS’89, Vancouver, BC, Canada, 10–14 July 1989; pp. 1355–1358. [Google Scholar]
- Datt, B. Remote Sensing of Water Content in Eucalyptus Leaves. Aust. J. Bot. 1999, 47, 909. [Google Scholar] [CrossRef]
- Pu, R.; Gong, P.; Yu, Q. Comparative Analysis of EO-1 ALI and Hyperion, and Landsat ETM+ Data for Mapping Forest Crown Closure and Leaf Area Index. Sensors 2008, 8, 3744–3766. [Google Scholar] [CrossRef] [Green Version]
- Crist, E.P.; Cicone, R.C. A Physically-Based Transformation of Thematic Mapper Data—The TM Tasseled Cap. IEEE Trans. Geosci. Remote Sens. 1984, GE-22, 256–263. [Google Scholar] [CrossRef]
- Bannari, A.; Morin, D.; Bonn, F.; Huete, A.R. A Review of Vegetation Indices. Remote Sens. Rev. 1995, 13, 95–120. [Google Scholar] [CrossRef]
- Ferencz, C.; Bognár, P.; Lichtenberger, J.; Hamar, D.; Tarcsai, G.; Timár, G.; Molnár, G.; Pásztor, S.Z.; Steinbach, P.; Székely, B.; et al. Crop Yield Estimation by Satellite Remote Sensing. Int. J. Remote Sens. 2004, 25, 4113–4149. [Google Scholar] [CrossRef]
- Gitelson, A.A. Wide Dynamic Range Vegetation Index for Remote Quantification of Biophysical Characteristics of Vegetation. J. Plant Physiol. 2004, 161, 165–173. [Google Scholar] [CrossRef] [Green Version]
- Hancock, D.W.; Dougherty, C.T. Relationships between Blue- and Red-Based Vegetation Indices and Leaf Area and Yield of Alfalfa. Crop Sci. 2007, 47, 2547. [Google Scholar] [CrossRef]
- Lymburne, L.; Beggs, P.J.; Jacobson, C.R. Estimation of Canopy-Average Surface-Specific Leaf Area Using Landsat TM Data. Photogramm. Eng. Remote Sens. 2000, 66, 183–191. [Google Scholar]
- Blackburn, G.A. Spectral Indices for Estimating Photosynthetic Pigment Concentrations: A Test Using Senescent Tree Leaves. Int. J. Remote Sens. 1998, 19, 657–675. [Google Scholar] [CrossRef]
- Kauth, R.; Thomas, G. The Tasselled Cap—A Graphic Description of the Spectral-Temporal Development of Agricultural Crops as Seen by LANDSAT. In Symposium on Machine Processing of Remotely Sensed Data; The Laboratory for Applications of Remote Sensing, Purdue University: West Lafayette, IN, USA, 1976; pp. 41–51. [Google Scholar]
- Hardinsky, M.A.; Lemas, V. The Influence of Soil Salinity, Growth Form, and Leaf Moisture on the Spectral Reflectance of Spartina Alternifolia Canopies. Photogramm. Eng. Remote Sens. 1983, 49, 77–83. [Google Scholar]
- Le Maire, G.; François, C.; Soudani, K.; Berveiller, D.; Pontailler, J.-Y.; Bréda, N.; Genet, H.; Davi, H.; Dufrêne, E. Calibration and Validation of Hyperspectral Indices for the Estimation of Broadleaved Forest Leaf Chlorophyll Content, Leaf Mass per Area, Leaf Area Index and Leaf Canopy Biomass. Remote Sens. Environ. 2008, 112, 3846–3864. [Google Scholar] [CrossRef]
- Wang, F.; Huang, J.; Tang, Y.; Wang, X. New Vegetation Index and Its Application in Estimating Leaf Area Index of Rice. Rice Sci. 2007, 14, 195–203. [Google Scholar] [CrossRef]
- Broge, N.H.; Leblanc, E. Comparing Prediction Power and Stability of Broadband and Hyperspectral Vegetation Indices for Estimation of Green Leaf Area Index and Canopy Chlorophyll Density. Remote Sens. Environ. 2001, 76, 156–172. [Google Scholar] [CrossRef]
- Al-Khaier, F. Soil Salinity Detection Using Satellite Remote Sensing. Master’s Thesis, Universiteit Twenten, Enschede, The Netherlands, 2003. [Google Scholar]
- Misra, P.N.; Wheeler, S.G.; Oliver, R.E. Kauth-Thomas Brightness and Greenness Axes; NASA: Washington, DC, USA, 1977; pp. 23–46. [Google Scholar]
- Gadal, S.; Ouerghemmi, W.; Gadal, S.; Ouerghemmi, W. Multi-Level Morphometric Characterization of Built-up Areas and Change Detection in Siberian Sub-Arctic Urban Area: Yakutsk. ISPRS Int. J. Geo-Inf. 2019, 8, 129. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, H.; Karnieli, A. Sensitivity of Vegetation Indices to Substrate Brightness in Hyper-Arid Environment: The Makhtesh Ramon Crater (Israel) Case Study. Int. J. Remote Sens. 2001, 22, 3503–3520. [Google Scholar] [CrossRef]
- Xu, H. Modification of Normalised Difference Water Index (NDWI) to Enhance Open Water Features in Remotely Sensed Imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Gao, B. NDWI—A Normalized Difference Water Index for Remote Sensing of Vegetation Liquid Water from Space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Lacaux, J.P.; Tourre, Y.M.; Vignolles, C.; Ndione, J.A.; Lafaye, M. Classification of Ponds from High-Spatial Resolution Remote Sensing: Application to Rift Valley Fever Epidemics in Senegal. Remote Sens. Environ. 2007, 106, 66–74. [Google Scholar] [CrossRef]




| Class | Definition |
|---|---|
| Native | This class represents the native grassland, composed primarily (>75%) of native grass species, such as:
|
| Mixed | This class represents one or more of the followings cases:
|
| Tame | This class represents the tame grassland areas that have, in most cases, been intentionally modified and are composed primarily (>75%) of planted introduced grasses and forbs such as:
|
| Cropland | This class represents all annually cultivated areas and summer-fallow crops. |
| Shrub | This class represents the predominantly woody vegetation of relatively low height (generally <2 m). |
| Forest | This class represents the predominantly forest areas such as:
|
| Water | This class represents deep water bodies such as lakes and rivers and shallow water bodies
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Badreldin, N.; Prieto, B.; Fisher, R. Mapping Grasslands in Mixed Grassland Ecoregion of Saskatchewan Using Big Remote Sensing Data and Machine Learning. Remote Sens. 2021, 13, 4972. https://doi.org/10.3390/rs13244972
Badreldin N, Prieto B, Fisher R. Mapping Grasslands in Mixed Grassland Ecoregion of Saskatchewan Using Big Remote Sensing Data and Machine Learning. Remote Sensing. 2021; 13(24):4972. https://doi.org/10.3390/rs13244972
Chicago/Turabian StyleBadreldin, Nasem, Beatriz Prieto, and Ryan Fisher. 2021. "Mapping Grasslands in Mixed Grassland Ecoregion of Saskatchewan Using Big Remote Sensing Data and Machine Learning" Remote Sensing 13, no. 24: 4972. https://doi.org/10.3390/rs13244972
APA StyleBadreldin, N., Prieto, B., & Fisher, R. (2021). Mapping Grasslands in Mixed Grassland Ecoregion of Saskatchewan Using Big Remote Sensing Data and Machine Learning. Remote Sensing, 13(24), 4972. https://doi.org/10.3390/rs13244972