
Res2-Unet+, a Practical Oil Tank Detection Network for Large-Scale High Spatial Resolution Images

Abstract
:1. Introduction
- (1)
- An end-to-end deep neural network to detect oil tanks.
- (2)
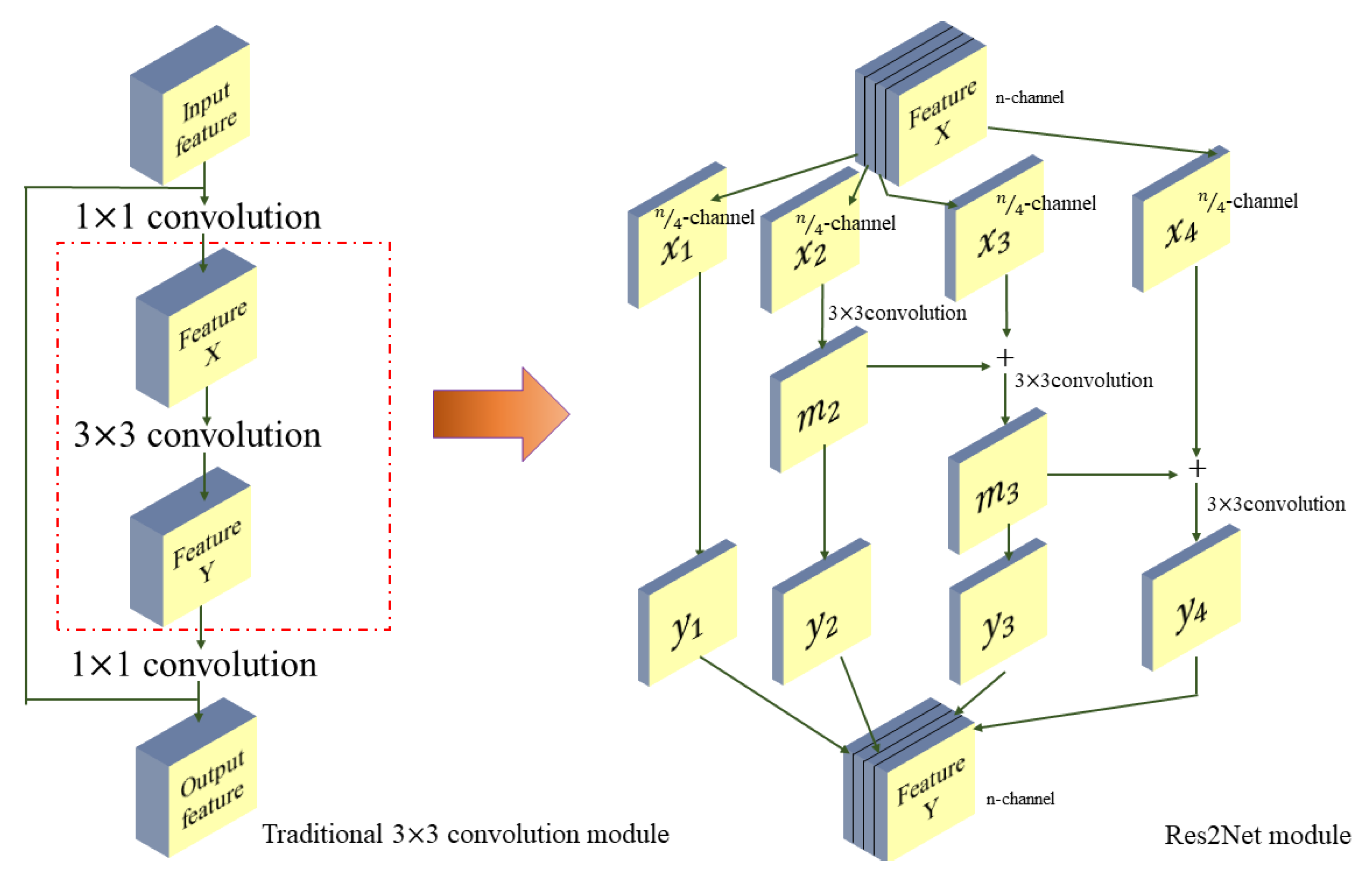
- An enhanced learning capability of multi-scale oil tank features by adopting a hierarchical residual feature learning module to learn features at a more granular level, and to broaden the range of the receptive field of each network layer.
- (3)
- An increase in the potential for applications by training and evaluating the proposed oil tank detection model in different large-scale areas.
2. Related Works
3. Methods
4. Experiments and Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zalpour, M.; Akbarizadeh, G.; Alaei-Sheini, N. A new approach for oil tank detection using deep learning features with control false alarm rate in high-resolution satellite imagery. Int. J. Remote Sens. 2020, 41, 2239–2262. [Google Scholar] [CrossRef]
- Chen, F.; Yu, B.; Xu, C.; Li, B. Landslide detection using probability regression, a case study of wenchuan, northwest of chengdu. Appl. Geogr. 2017, 89, 32–40. [Google Scholar] [CrossRef]
- Izadi, M.; Mohammadzadeh, A.; Haghighattalab, A. A new neuro-fuzzy approach for post-earthquake road damage assessment using ga and svm classification from quickbird satellite images. J. Indian Soc. Remote Sens. 2017, 45, 965–977. [Google Scholar] [CrossRef]
- Yu, B.; Yang, L.; Chen, F. Semantic segmentation for high spatial resolution remote sensing images based on convolution neural network and pyramid pooling module. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3252–3261. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, D.; Shi, Z.; Jiang, Z. Unsupervised saliency model with color markov chain for oil tank detection. Remote Sens. 2019, 11, 1089. [Google Scholar] [CrossRef] [Green Version]
- Kushwaha, N.K.; Chaudhuri, D.; Singh, M.P. Automatic bright circular type oil tank detection using remote sensing images. Def. Sci. J. 2013, 63, 298–304. [Google Scholar] [CrossRef] [Green Version]
- Yuen, H.; Princen, J.; Illingworth, J.; Kittler, J. Comparative study of hough transform methods for circle finding. Image Vis. Comput. 1990, 8, 71–77. [Google Scholar] [CrossRef] [Green Version]
- Atherton, T.J.; Kerbyson, D.J. Size invariant circle detection. Image Vis. Comput. 1999, 17, 795–803. [Google Scholar] [CrossRef]
- Li, B.; Yin, D.; Yuan, X.; Li, G.-Q. Oilcan recognition method based on improved hough transform. Opto-Electron. Eng. 2008, 35, 30–34. [Google Scholar]
- Weisheng, Z.; Hong, Z.; Chao, W.; Tao, W. Automatic oil tank detection algorithm based on remote sensing image fusion. In Proceedings of the 25th Anniversary IGARSS 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea, 9–29 July 2005; pp. 3956–3958. [Google Scholar]
- Cai, X.; Sui, H.; Lv, R.; Song, Z. Automatic circular oil tank detection in high-resolution optical image based on visual saliency and hough transform. In Proceedings of the 2014 IEEE Workshop on Electronics, Computer and Applications, Ottawa, ON, Canada, 8–9 May 2014; pp. 408–411. [Google Scholar]
- Ok, A.O. A new approach for the extraction of aboveground circular structures from near-nadir vhr satellite imagery. IEEE Trans. Geosci. Remote Sens. 2013, 52, 3125–3140. [Google Scholar] [CrossRef]
- Xu, H.; Chen, W.; Sun, B.; Chen, Y.; Li, C. Oil tank detection in synthetic aperture radar images based on quasi-circular shadow and highlighting arcs. J. Appl. Remote Sens. 2014, 8, 083689. [Google Scholar] [CrossRef]
- Yao, Y.; Jiang, Z.; Zhang, H. Oil tank detection based on salient region and geometric features. In Proceedings of the Optoelectronic Imaging and Multimedia Technology III, Beijing, China, 9–11 October 2014; p. 92731G. [Google Scholar]
- Jing, M.; Zhao, D.; Zhou, M.; Gao, Y.; Jiang, Z.; Shi, Z. Unsupervised oil tank detection by shape-guide saliency model. IEEE Geosci. Remote Sens. Lett. 2018, 16, 477–481. [Google Scholar] [CrossRef]
- Ok, A.O.; Başeski, E. Circular oil tank detection from panchromatic satellite images: A new automated approach. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1347–1351. [Google Scholar] [CrossRef]
- Xia, X.; Liang, H.; RongFeng, Y.; Kun, Y. Oil tank extraction in high-resolution remote sensing images based on deep learning. In Proceedings of the 26th International Conference on Geoinformatics, Kunming, China, 28–30 June 2018; pp. 1–6. [Google Scholar]
- Zhang, L.; Shi, Z.; Wu, J. A hierarchical oil tank detector with deep surrounding features for high-resolution optical satellite imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4895–4909. [Google Scholar] [CrossRef]
- Tadros, A.; Drouyer, S.; Gioi, R.G.v.; Carvalho, L. Oil tank detection in satellite images via a contrario clustering. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 2233–2236. [Google Scholar]
- Chen, Y.; Li, L.; Whiting, M.; Chen, F.; Sun, Z.; Song, K.; Wang, Q. Convolutional neural network model for soil moisture prediction and its transferability analysis based on laboratory vis-nir spectral data. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102550. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 886–893. [Google Scholar]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (surf). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Ivanovsky, L.; Khryashchev, V.; Pavlov, V.; Ostrovskaya, A. Building detection on aerial images using u-net neural networks. In Proceedings of the 24th Conference of Open Innovations Association (FRUCT), Moscow, Russia, 8–12 April 2019; pp. 116–122. [Google Scholar]
- Wang, P.; Chen, P.; Yuan, Y.; Liu, D.; Huang, Z.; Hou, X.; Cottrell, G. Understanding convolution for semantic segmentation. In Proceedings of the 2018 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Tahoe, NV, USA, 12–15 March 2018; pp. 1451–1460. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity mappings in deep residual networks. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 630–645. [Google Scholar]
- Sengupta, A.; Ye, Y.; Wang, R.; Liu, C.; Roy, K. Going deeper in spiking neural networks: Vgg and residual architectures. Front. Neurosci. 2019, 13, 95. [Google Scholar] [CrossRef] [PubMed]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Yu, F.; Koltun, V. Multi-scale context aggregation by dilated convolutions. arXiv 2015, arXiv:1511.07122. [Google Scholar]
- Chen, L.-C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef] [PubMed]
- Liu, P.; Liu, X.; Liu, M.; Shi, Q.; Yang, J.; Xu, X.; Zhang, Y. Building footprint extraction from high-resolution images via spatial residual inception convolutional neural network. Remote Sens. 2019, 11, 830. [Google Scholar] [CrossRef] [Green Version]
- Sebastian, C.; Imbriaco, R.; Bondarev, E.; de With, P.H. Contextual pyramid attention network for building segmentation in aerial imagery. arXiv 2020, arXiv:2004.07018. [Google Scholar]
- He, N.; Fang, L.; Plaza, A. Hybrid first and second order attention unet for building segmentation in remote sensing images. Sci. China Inf. Sci. 2020, 63, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Siddiquee, M.; Tajbakhsh, N.; Liang, J. Unet++: A nested u-net architecture for medical image segmentation. In Proceedings of the 4th Deep Learning in Medical Image Analysis (DLMIA) Workshop, Granada, Spain, 20 September 2018. [Google Scholar]
- Gao, S.; Cheng, M.-M.; Zhao, K.; Zhang, X.-Y.; Yang, M.-H.; Torr, P.H. Res2net: A new multi-scale backbone architecture. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 652–662. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, G.; Chen, P.; Shi, Y.; Hsieh, C.-Y.; Liao, B.; Zhang, S. Rethinking the usage of batch normalization and dropout in the training of deep neural networks. arXiv 2019, arXiv:1905.05928. [Google Scholar]
- Bottou, L. Large-scale machine learning with stochastic gradient descent. In Proceedings of the COMPSTAT’2010, Paris, France, 22–27 August 2010; pp. 177–186. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | City | Time | Spatial Resolution | Train/Validate |
|---|---|---|---|---|
| Gaofen-1 | Cangzhou | 14 March 2020 | 2 m | Train |
| Gaofen-2 | Yantai | 20 July 2020 | 1 m | Validate |
| Gaofen-6 | Tangshan | 2 June 2020 | 2 m | Train |
| Ziyuan | Dongying | 29 April 2020 | 2 m | Train |
| Method | Precision | Recall | F1-Measure | IOU | FPS |
|---|---|---|---|---|---|
| Res2-Unet+ | 94.03 | 89.78 | 91.57 | 85.14 | 103.28 |
| Unet | 90.96 | 89.11 | 89.69 | 84.22 | 105.32 |
| Segnet | 89.12 | 89.38 | 88.77 | 82.89 | 90.23 |
| PSPNet | 74.47 | 60.87 | 60.98 | 47.45 | 40.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, B.; Chen, F.; Wang, Y.; Wang, N.; Yang, X.; Ma, P.; Zhou, C.; Zhang, Y. Res2-Unet+, a Practical Oil Tank Detection Network for Large-Scale High Spatial Resolution Images. Remote Sens. 2021, 13, 4740. https://doi.org/10.3390/rs13234740
Yu B, Chen F, Wang Y, Wang N, Yang X, Ma P, Zhou C, Zhang Y. Res2-Unet+, a Practical Oil Tank Detection Network for Large-Scale High Spatial Resolution Images. Remote Sensing. 2021; 13(23):4740. https://doi.org/10.3390/rs13234740
Chicago/Turabian StyleYu, Bo, Fang Chen, Yu Wang, Ning Wang, Xiaoyu Yang, Pengfei Ma, Chunyan Zhou, and Yuhuan Zhang. 2021. "Res2-Unet+, a Practical Oil Tank Detection Network for Large-Scale High Spatial Resolution Images" Remote Sensing 13, no. 23: 4740. https://doi.org/10.3390/rs13234740
APA StyleYu, B., Chen, F., Wang, Y., Wang, N., Yang, X., Ma, P., Zhou, C., & Zhang, Y. (2021). Res2-Unet+, a Practical Oil Tank Detection Network for Large-Scale High Spatial Resolution Images. Remote Sensing, 13(23), 4740. https://doi.org/10.3390/rs13234740