
Vegetation Types Mapping Using Multi-Temporal Landsat Images in the Google Earth Engine Platform

 ,
,  ,
, 
Abstract
:
1. Introduction
2. Materials and Methods
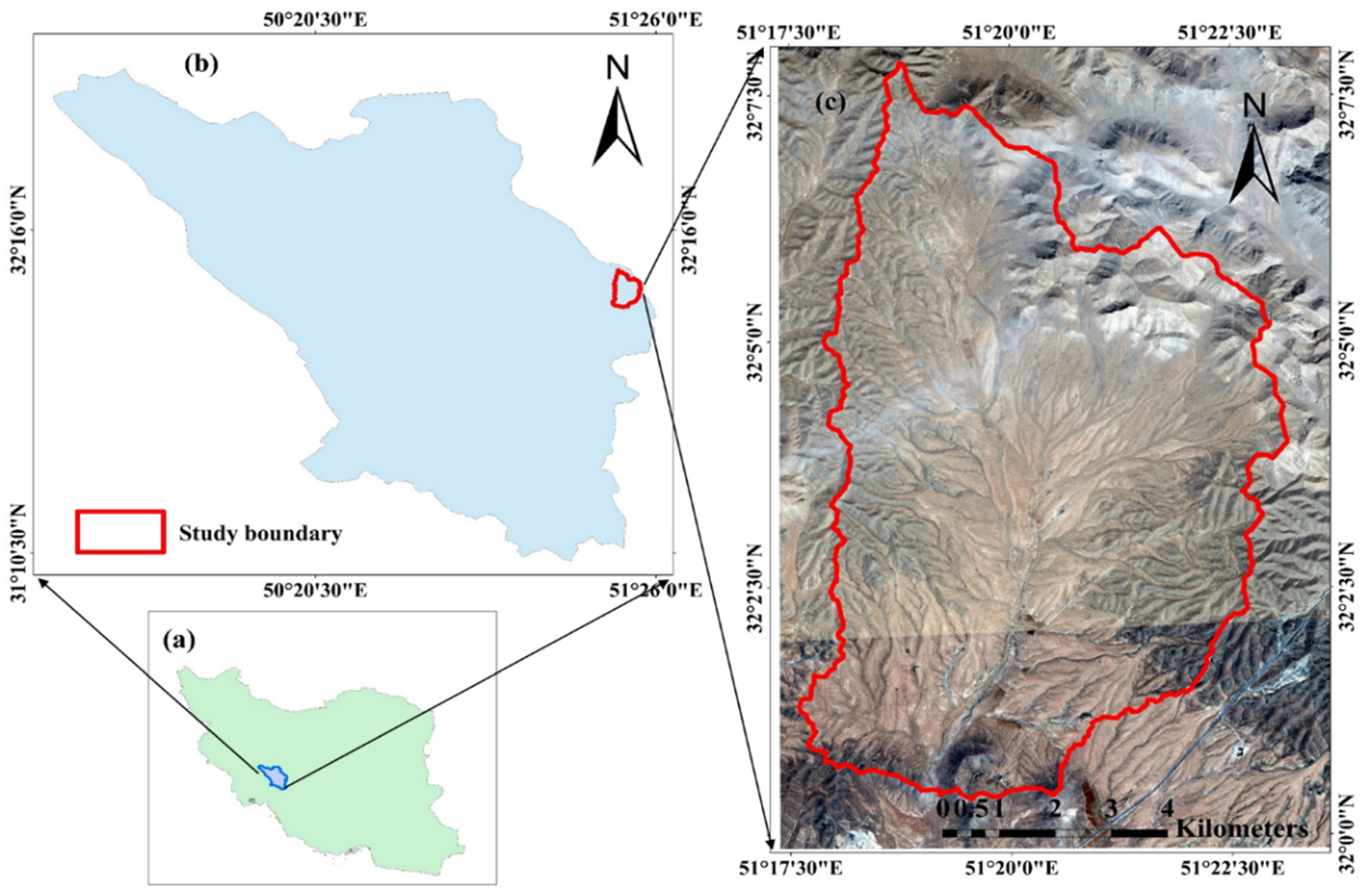
2.1. Study Area
2.2. Field Measurements of VTs
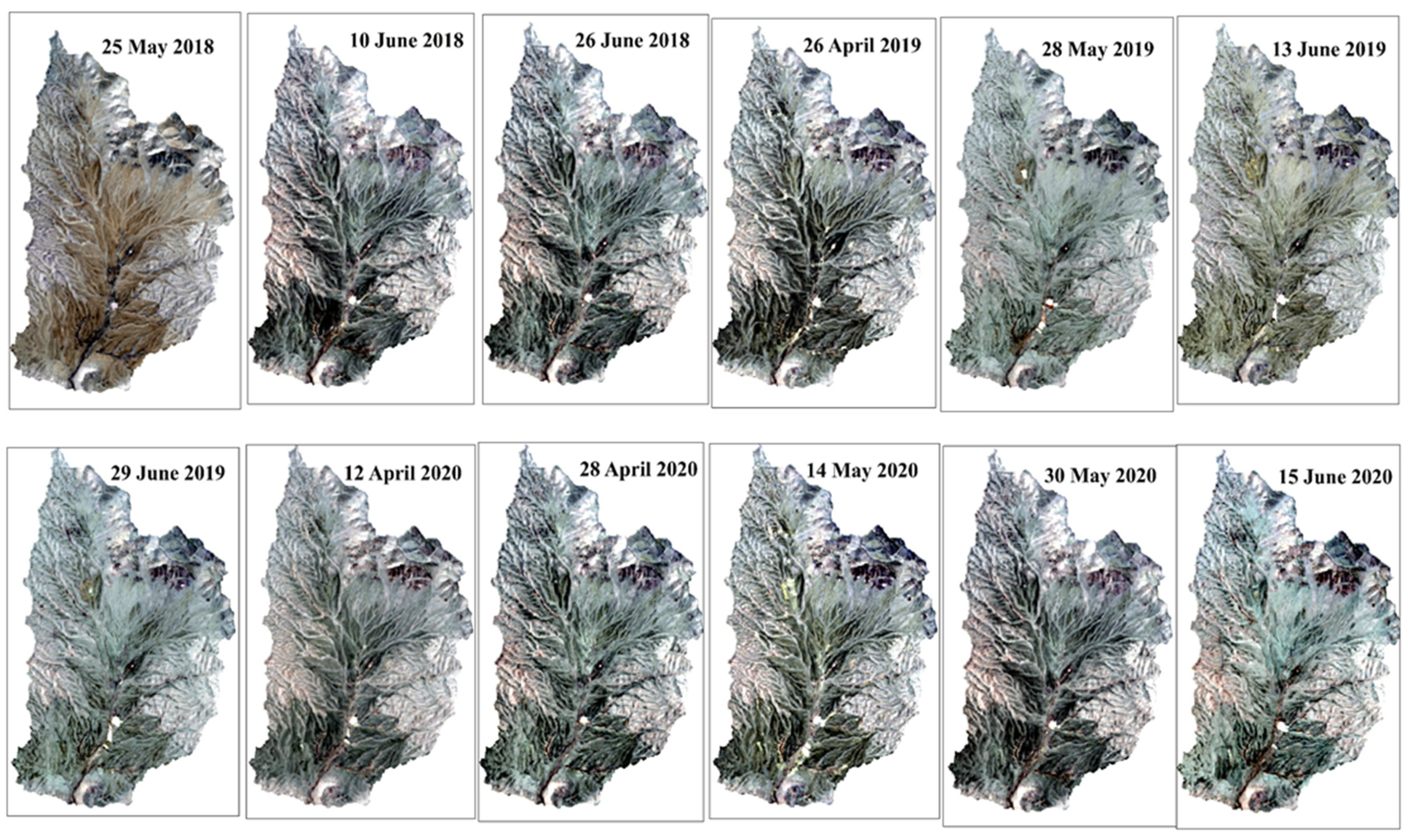
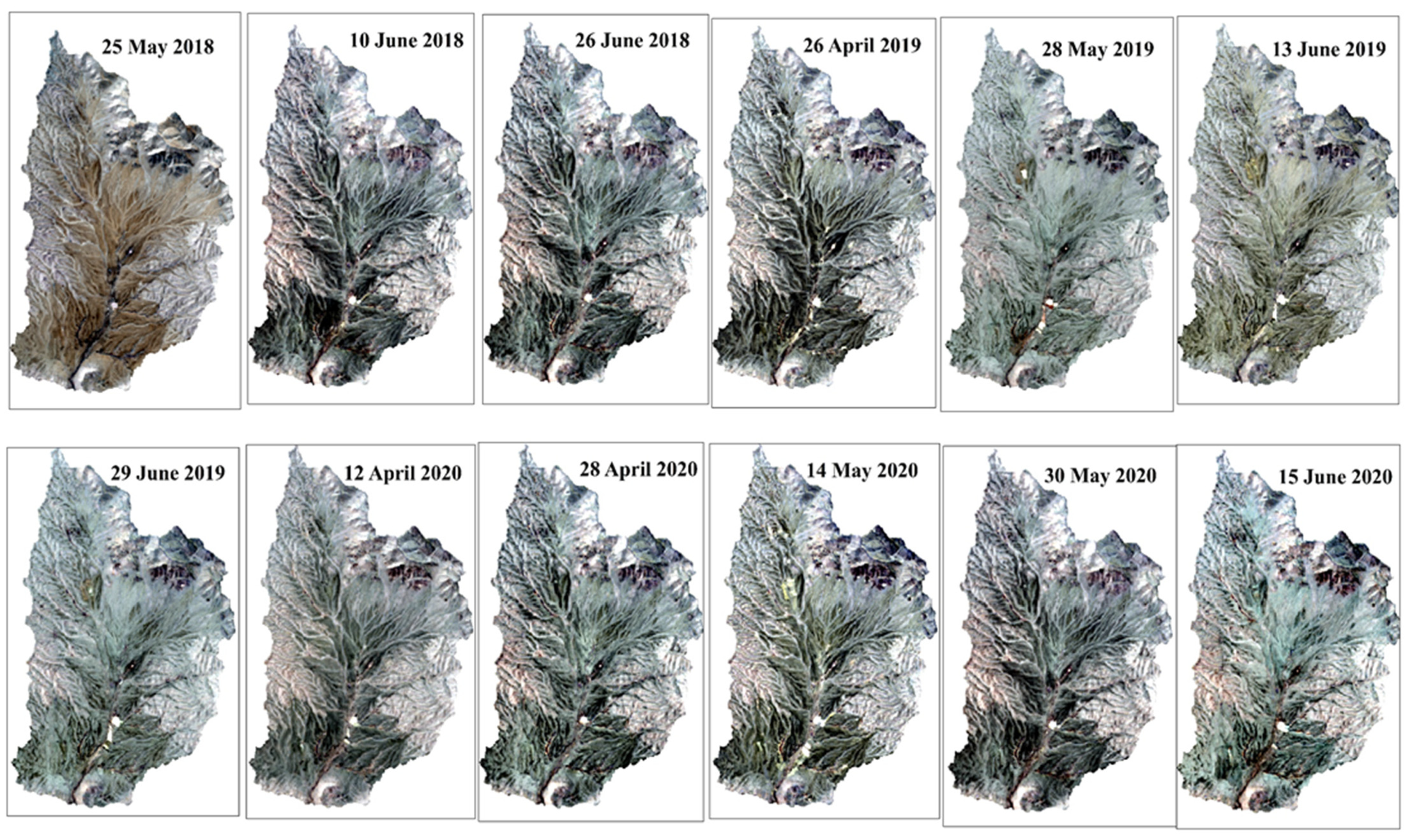
2.3. Spectral Time Series Landsat Data and NDVI Spectral Curve
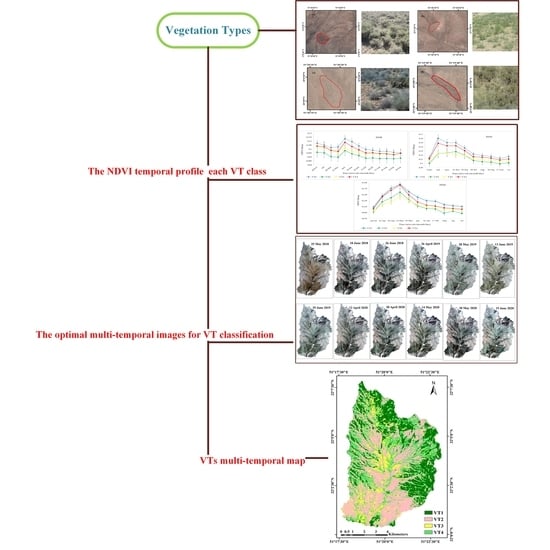
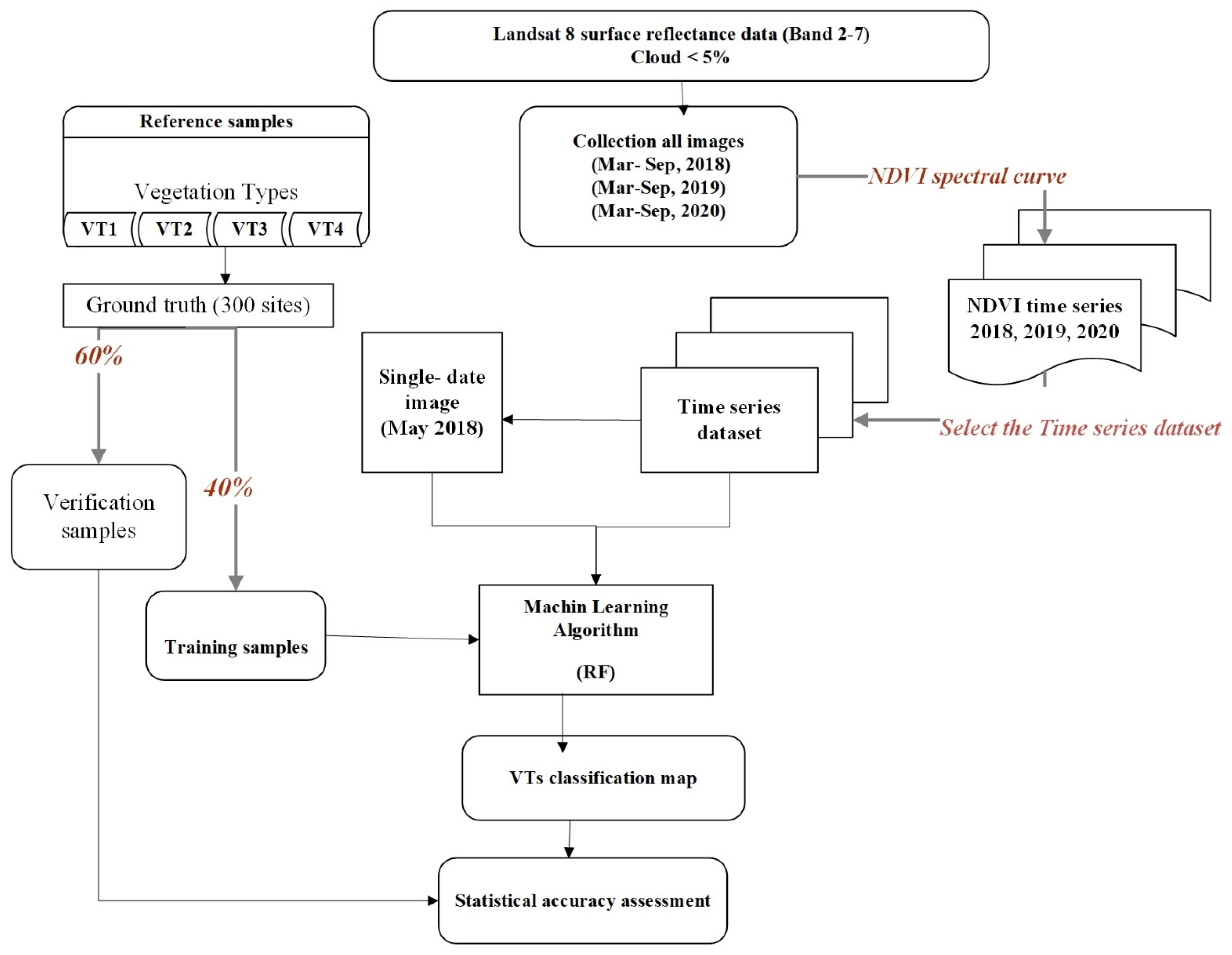
2.4. Methodology
2.4.1. Field Samples
2.4.2. VTs Classification with Multi-Temporal Images
2.4.3. Prediction Assessment and Statistical Comparison of Classifications
3. Results
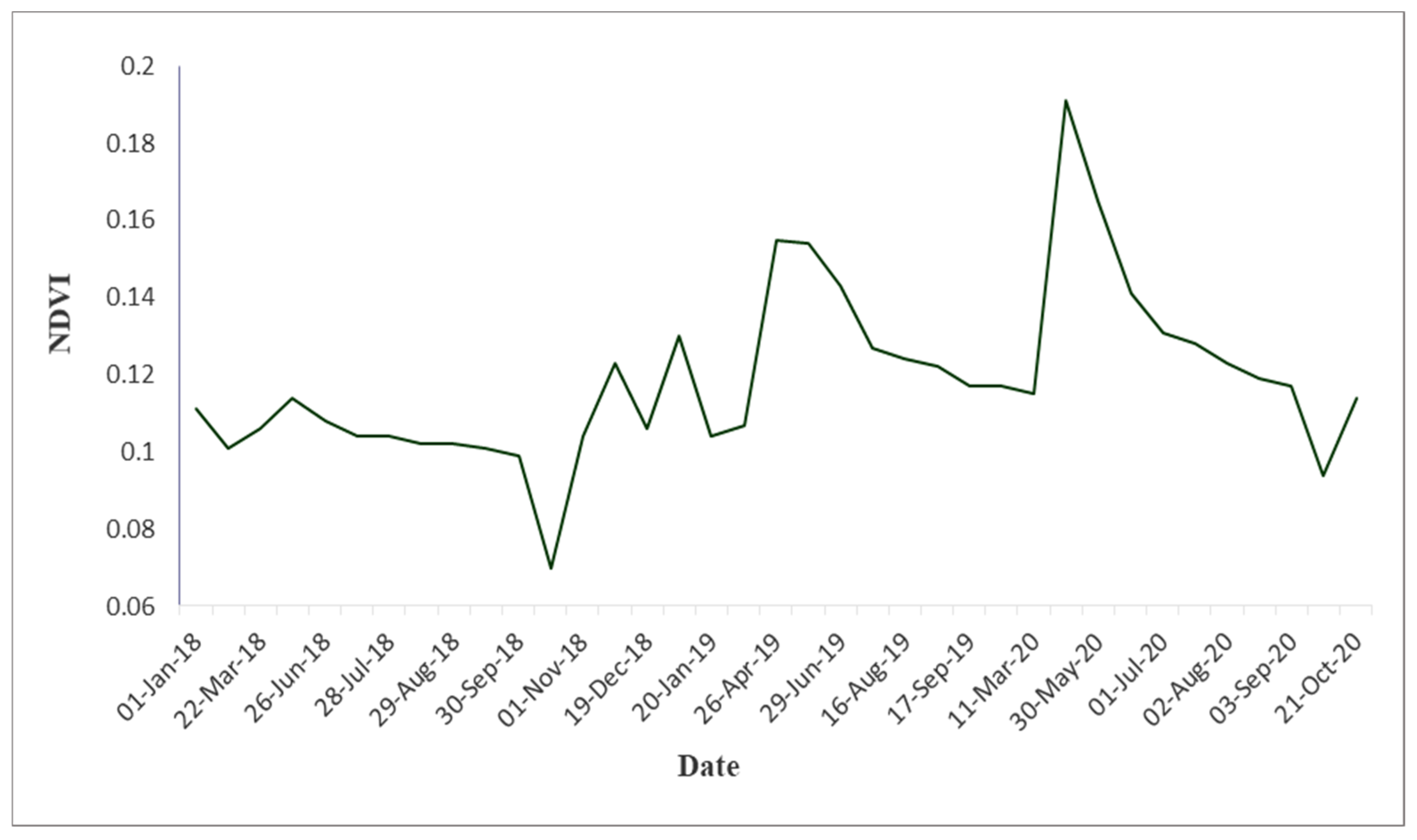
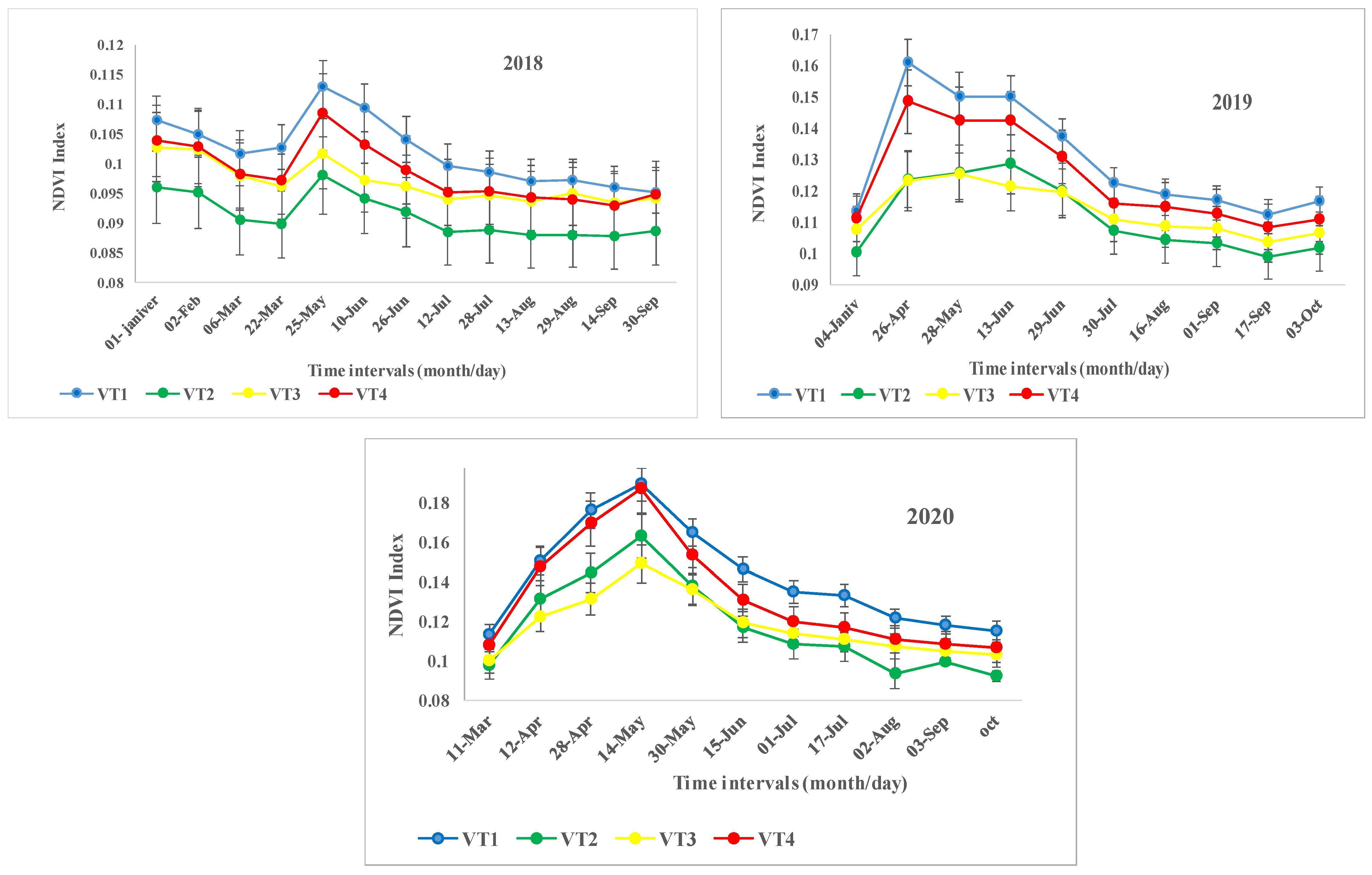
3.1. NDVI Values Profile Results
3.2. Select the Time-Series Dataset
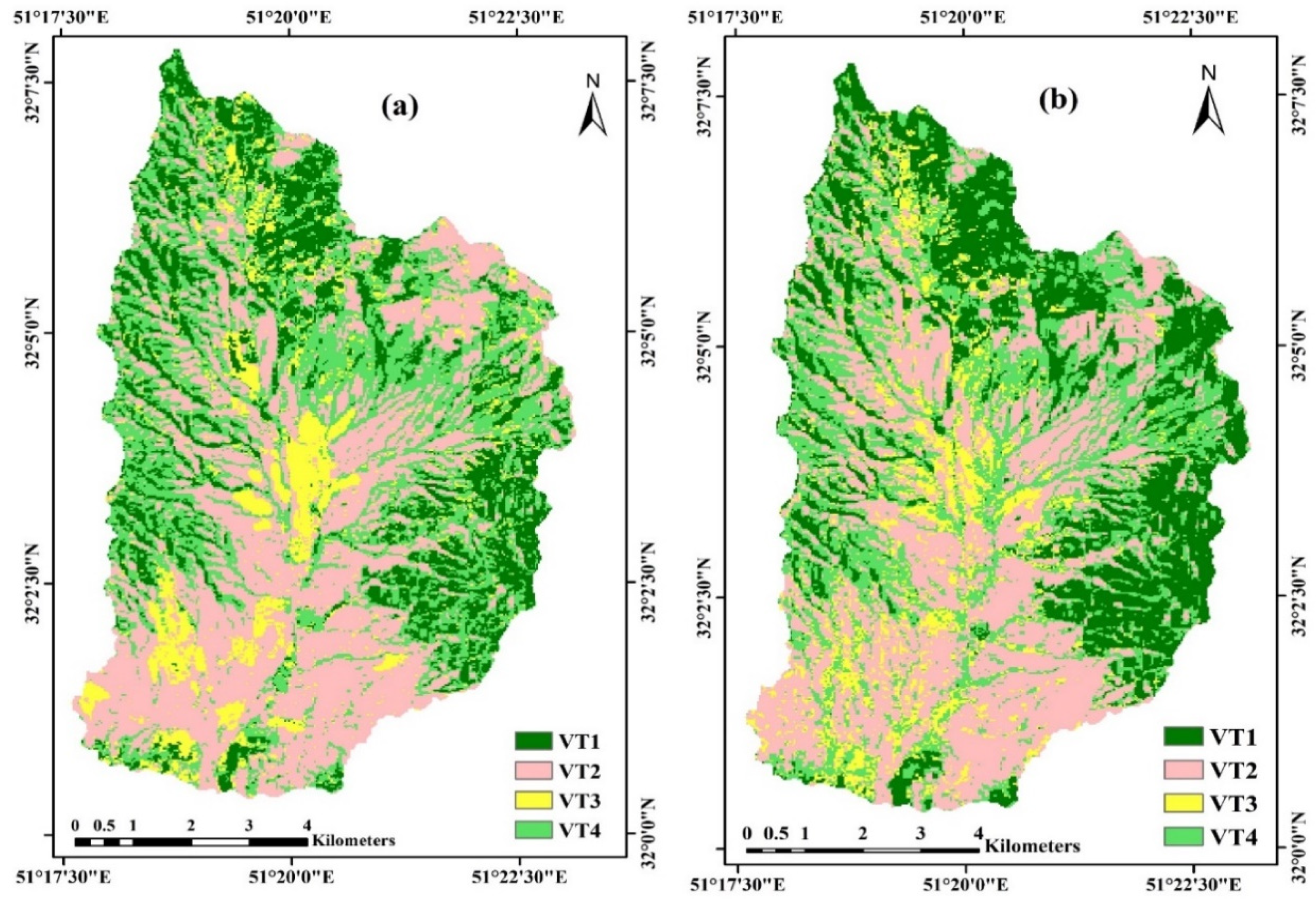
3.3. VTs Classification
3.4. Comparing Single-Date Image and Multi-Temporal Images in VTs Classification
3.5. Statistical Comparison
4. Discussion
4.1. NDVI Temporal Profiles
4.2. Mapping VTs
4.3. The Roles of Multi-Temporal Satellite Imagery in VTs Classification
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hurskainen, P.; Adhikari, H.; Siljander, M.; Pellikka, P.K.E.; Hemp, A. Auxiliary datasets improve accuracy of object-based land use/land cover classification in heterogeneous savanna landscapes. Remote Sens. Environ. 2019, 233, 111354. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, L.; Wang, Y.; Hu, Y.; Zhang, B. A SPECLib-based operational classification approach: A preliminary test on China land cover mapping at 30 m. Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 83–94. [Google Scholar] [CrossRef]
- Topaloğlu, R.H.; Sertel, E.; Musaoğlu, N. Assessment of Classification Accuracies of Sentinel-2 and Landsat-8 Data for Land Cover/Use Mapping. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B8, 1055–1059. [Google Scholar] [CrossRef] [Green Version]
- Yu, L.; Fu, H.; Wu, B.; Clinton, N.; Gong, P. Exploring the potential role of feature selection in global land-cover mapping. Int. J. Remote Sens. 2016, 37, 5491–5504. [Google Scholar] [CrossRef]
- Ratcliff, F.; Bartolome, J.; Macaulay, L.; Spiegal, S.; White, M.D. Applying ecological site concepts and state-and-transition models to a grazed riparian rangeland. Ecol. Evol. 2018, 8, 4907–4918. [Google Scholar] [CrossRef] [PubMed]
- Blanco, P.D.; del Valle, H.F.; Bouza, P.J.; Metternicht, G.I.; Hardtke, L.A. Ecological site classification of semiarid rangelands: Synergistic use of Landsat and Hyperion imagery. Int. J. Appl. Earth Obs. Geoinf. 2014, 29, 11–21. [Google Scholar] [CrossRef]
- Ghorbanian, A.; Kakooei, M.; Amani, M.; Mahdavi, S.; Mohammadzadeh, A.; Hasanlou, M. Improved land cover map of Iran using Sentinel imagery within Google Earth Engine and a novel automatic workflow for land cover classification using migrated training samples. ISPRS J. Photogramm. Remote Sens. 2020, 167, 276–288. [Google Scholar] [CrossRef]
- Aghababaei, M.; Ebrahimi, A.; Naghipour, A.A.; Asadi, E.; Verrelst, J. Classification of Plant Ecological Units in Heterogeneous Semi-Steppe Rangelands: Performance Assessment of Four Classification Algorithms. Remote Sens. 2021, 13, 3433. [Google Scholar] [CrossRef]
- Maynard, J.J.; Karl, J.W. A hyper-temporal remote sensing protocol for high-resolution mapping of ecological sites. PLoS ONE 2017, 12, e0175201. [Google Scholar] [CrossRef]
- Hu, Y.; Hu, Y. Land Cover Changes and Their Driving Mechanisms in Central Asia from 2001 to 2017 Supported by Google Earth Engine. Remote Sens. 2019, 11, 554. [Google Scholar] [CrossRef] [Green Version]
- Rapinel, S.; Mony, C.; Lecoq, L.; Clément, B.; Thomas, A.; Hubert-Moy, L. Evaluation of Sentinel-2 time-series for mapping floodplain grassland plant communities. Remote Sens. Environ. 2019, 223, 115–129. [Google Scholar] [CrossRef]
- Stumpf, F.; Schneider, M.K.; Keller, A.; Mayr, A.; Rentschler, T.; Meuli, R.G.; Schaepman, M.; Liebisch, F. Spatial monitoring of grassland management using multi-temporal satellite imagery. Ecol. Indic. 2020, 113, 106201. [Google Scholar] [CrossRef]
- Weng, Q. Remote Sensing Time Series Image Processing; Taylor & Francis Series in Imaging Science; International Standard Book Number-13: 978-1-138-05459-2 (Hardback); CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Macintyre, P.; van Niekerk, A.; Mucina, L. Efficacy of multi-season Sentinel-2 imagery for compositional vegetation classification. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 101980. [Google Scholar] [CrossRef]
- Koskinen, J.; Leinonen, U.; Vollrath, A.; Ortmann, A.; Lindquist, E.; d’Annunzio, R.; Pekkarinen, A.; Käyhkö, N. Participatory mapping of forest plantations with Open Foris and Google Earth Engine. ISPRS J. Photogramm. Remote Sens. 2019, 148, 63–74. [Google Scholar] [CrossRef]
- Li, W.; Dong, R.; Fu, H.; Wang, J.; Yu, L.; Gong, P. Integrating Google Earth imagery with Landsat data to improve 30-m resolution land cover mapping. Remote Sens. Environ. 2020, 237, 111563. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Valderrama-Landeros, L.; Flores-Verdugo, F.; Rodriguez-Sobreyra, R.; Kovacs, J.M.; Flores-de-Santiago, F. Extrapolating canopy phenology information using Sentinel-2 data and the Google Earth Engine platform to identify the optimal dates for remotely sensed image acquisition of semiarid mangroves. J. Environ. Manag. 2021, 279, 111617. [Google Scholar] [CrossRef]
- Teluguntla, P.; Thenkabail, P.S.; Oliphant, A.; Xiong, J.; Gumma, M.K.; Congalton, R.G.; Yadav, K.; Huete, A. A 30-m landsat-derived cropland extent product of Australia and China using random forest machine learning algorithm on Google Earth Engine cloud computing platform. ISPRS J. Photogramm. Remote Sens. 2018, 144, 325–340. [Google Scholar] [CrossRef]
- Liu, X.; Hu, G.; Chen, Y.; Li, X.; Xu, X.; Li, S.; Pei, F.; Wang, S. High-resolution multi-temporal mapping of global urban land using Landsat images based on the Google Earth Engine Platform. Remote Sens. Environ. 2018, 209, 227–239. [Google Scholar] [CrossRef]
- Pipia, L.; Amin, E.; Belda, S.; Salinero-Delgado, M.; Verrelst, J. Green LAI Mapping and Cloud Gap-Filling Using Gaussian Process Regression in Google Earth Engine. Remote Sens. 2021, 13, 403. [Google Scholar] [CrossRef]
- Zhang, C.; Di, L.; Yang, Z.; Lin, L.; Hao, P. AgKit4EE: A toolkit for agricultural land use modeling of the conterminous United States based on Google Earth Engine. Environ. Model. Softw. 2020, 129, 104694. [Google Scholar] [CrossRef]
- Chen, N.; Yu, L.; Zhang, X.; Shen, Y.; Zeng, L.; Hu, Q.; Niyogi, D. Mapping Paddy Rice Fields by Combining Multi-Temporal Vegetation Index and Synthetic Aperture Radar Remote Sensing Data Using Google Earth Engine Machine Learning Platform. Remote Sens. 2020, 12, 2992. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A modified soil adjusted vegetation index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Isabel, C.-G.; Cristina, A.; Alfonso, G.-F.; Sánchez de la Orden, M. Combining Object-Based Image Analysis with Topographic Data for Landform Mapping: A Case Study in the Semi-Arid Chaco Ecosystem, Argentina. ISPRS Int. J. Geo-Inf. 2019, 8, 132. [Google Scholar] [CrossRef] [Green Version]
- Ge, G.; Zhu, Y.; Yang, X.; Hao, Y. Land use/cover classification in an arid desert-oasis mosaic landscape of China using remote sensed imagery: Performance assessment of four machine learning algorithms. Glob. Ecol. Conserv. 2020, 88. [Google Scholar] [CrossRef]
- Xie, Z.; Chen, Y.; Lu, D.; Li, G.; Chen, E. Classification of Land Cover, Forest, and Tree Species Classes with ZiYuan-3 Multispectral and Stereo Data. Remote Sens. 2019, 11, 164. [Google Scholar] [CrossRef] [Green Version]
- Sánchez-Ruiz, S.; Moreno-Martínez, Á.; Izquierdo-Verdiguier, E.; Chiesi, M.; Maselli, F.; Gilabert, M.A. Growing stock volume from multi-temporal landsat imagery through google earth engine. Int. J. Appl. Earth Obs. Geoinf. 2019, 83, 101913. [Google Scholar] [CrossRef]
- Ludwig, M.; Morgenthal, T.; Detsch, F.; Higginbottom, T.P.; Lezama Valdes, M.; Nauß, T.; Meyer, H. Machine learning and multi-sensor based modelling of woody vegetation in the Molopo Area, South Africa. Remote Sens. Environ. 2019, 222, 195–203. [Google Scholar] [CrossRef]
- Pflugmacher, D.; Rabe, A.; Peters, M.; Hostert, P. Mapping pan-European land cover using Landsat spectral-temporal metrics and the European LUCAS survey. Remote Sens. Environ. 2019, 221, 583–595. [Google Scholar] [CrossRef]
- Macintyre, P.D.; Van Niekerk, A.; Dobrowolski, M.P.; Tsakalos, J.L.; Mucina, L. Impact of ecological redundancy on the performance of machine learning classifiers in vegetation mapping. Ecol. Evol. 2018, 8, 6728–6737. [Google Scholar] [CrossRef]
- De Torres, F.N.; Richter, R.; Vohland, M. A multisensoral approach for high-resolution land cover and pasture degradation mapping in the humid tropics: A case study of the fragmented landscape of Rio de Janeiro. Int. J. Appl. Earth Obs. Geoinf. 2019, 78, 189–201. [Google Scholar] [CrossRef]
- Ouzemou, J.E.; El Harti, A.; Lhissou, R.; El Moujahid, A.; Bouch, N.; El Ouazzani, R.; Bachaoui, E.M.; El Ghmari, A. Crop type mapping from pansharpened Landsat 8 NDVI data: A case of a highly fragmented and intensive agricultural system. Remote Sens. Appl. Soc. Environ. 2018, 11, 94–103. [Google Scholar] [CrossRef]
- Xiong, J.; Thenkabail, P.S.; Gumma, M.K.; Teluguntla, P.; Poehnelt, J.; Congalton, R.G.; Yadav, K.; Thau, D. Automated cropland mapping of continental Africa using Google Earth Engine cloud computing. ISPRS J. Photogramm. Remote Sens. 2017, 126, 225–244. [Google Scholar] [CrossRef] [Green Version]
- Zhou, B.; Okin, G.S.; Zhang, J. Leveraging Google Earth Engine (GEE) and machine learning algorithms to incorporate in situ measurement from different times for rangelands monitoring. Remote Sens. Environ. 2020, 236, 111521. [Google Scholar] [CrossRef]
- Phan, T.N.; Kuch, V.; Lehnert, L.W. Land Cover Classification using Google Earth Engine and Random Forest Classifier—The Role of Image Composition. Remote Sens. 2020, 12, 2411. [Google Scholar] [CrossRef]
- Talukdar, S.; Singha, P.; Mahato, S.; Shahfahad; Pal, S.; Liou, Y.-A.; Rahman, A. Land-Use Land-Cover Classification by Machine Learning Classifiers for Satellite Observations—A Review. Remote Sens. 2020, 12, 1135. [Google Scholar] [CrossRef] [Green Version]
- Feng, D.; Yu, L.; Zhao, Y.; Cheng, Y.; Xu, Y.; Li, C.; Gong, P. A multiple dataset approach for 30-m resolution land cover mapping: A case study of continental Africa. Int. J. Remote Sens. 2018, 39, 3926–3938. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | Dominant Species * | Dominant Life Form | Accompanied Species * | Dominant Soil Type |
|---|---|---|---|---|
| VT1 | Astragalus verus Olivier. (As ve). (23.4%) | Shrub | Scariola orientalis (Boiss) Sojak. (2.5%) Alyssum linifolium Steph. ex Wild. (2%) Heteranthelium piliferum Hochst. ex Jaub. (1.8%) Astragalus macropelmatus Bunge. (1.3%) Acanthophyllum spinosum (Desf.) C.A.Mey. (0.8%) | Sandy loamy to loamy clay |
| VT2 | Bromus tomentellus Boiss. (Br to). (8.9%) | Tallgrass | Phlomis olivieri Benth. (2.5%) Stipa hohenackeriana Trin & Rupr. (2%) Achillea wilhelmsii C. Koch, L. (1.8%) Centaurea aucheri (DC.) Wagenitz. (1.2%) Gypsophila struthium. (1%) | Loamy and silty loamy |
| VT3 | Scariola orientalis (Boiss.) Sojak. (Sc or). (9.25%) | Semi-shrub | Noaea mucronata (Forsk.) Aschers et. Sch. (2.5%) Polygonum aridum Boiss. & Hausskn. (1.5%) Stachys inflata Benth. (1.2%) Tragopogon longirostris Bischoff ex Sch.Bip. (1%) Chardinia orientalis (L.) Kuntze. (0.5%) | Clay loam |
| VT4 | Astragalus verus Olivier (8.6%)—Bromus tomentellus Boiss (5.4) (As ve–Br to) | Shrub–Tallgrass | Euphorbia azerbajdzhanica Bordz. (2%) Phlomis persica Boiss. (1.5%) Turgenia latifolia (L.) Hoffm. (1.5%) Astragalus effusus Bunge. (1.3%) Cichorium intybus L. (0.5%) | Loamy and silty loamy |
| Year | Month/Day | Year | Month/Day | Year | Month/Day |
|---|---|---|---|---|---|
| 2018 | 1 January 2 February 6, 22 March 25 May 10, 26 June 12, 28 July 13, 29 August 14, 30 September 17 November 19 December | 2019 | 20 January 26 April 28 May 13, 29 June 30 July 16 August 1, 17 September 19 October | 2020 | 11 March 12, 28 April 14, 30 May 15 June 1, 17 July 18 August 3 September 21 October |
| Confusion Matrix Results Based on Single-Date Image Classification | |||||||
| Type | VT 1 | VT 2 | VT 3 | VT 4 | PA | UA | KIA |
| VT1 | 10 | 0 | 0 | 4 | 90 | 74 | 65 |
| VT 2 | 0 | 8 | 4 | 3 | 67 | 54 | 37 |
| VT 3 | 0 | 3 | 7 | 1 | 59 | 64 | 51 |
| VT 4 | 1 | 1 | 1 | 4 | 34 | 67 | 55 |
| Overall Kappa: 51% | Overall Accuracy: 64% | ||||||
| Confusion Matrix Results Based on Multi-Temporal Images Classification | |||||||
| Type | VT 1 | VT 2 | VT 3 | VT 4 | PA | UA | KIA |
| VT1 | 10 | 0 | 0 | 1 | 91 | 91 | 88 |
| VT 2 | 0 | 10 | 3 | 1 | 84 | 72 | 61 |
| VT 3 | 0 | 2 | 9 | 1 | 75 | 75 | 66 |
| VT 4 | 1 | 0 | 0 | 9 | 75 | 90 | 86 |
| Overall Kappa: 74% | Overall Accuracy: 81% | ||||||
| VTs Accuracy | Sig |
|---|---|
| Producer’s Accuracy (PA) | 0.038 * |
| User’s Accuracy (UA) | 0.023 * |
| Kappa Index of Agreement (KIA) | 0.038 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aghababaei, M.; Ebrahimi, A.; Naghipour, A.A.; Asadi, E.; Verrelst, J. Vegetation Types Mapping Using Multi-Temporal Landsat Images in the Google Earth Engine Platform. Remote Sens. 2021, 13, 4683. https://doi.org/10.3390/rs13224683
Aghababaei M, Ebrahimi A, Naghipour AA, Asadi E, Verrelst J. Vegetation Types Mapping Using Multi-Temporal Landsat Images in the Google Earth Engine Platform. Remote Sensing. 2021; 13(22):4683. https://doi.org/10.3390/rs13224683
Chicago/Turabian StyleAghababaei, Masoumeh, Ataollah Ebrahimi, Ali Asghar Naghipour, Esmaeil Asadi, and Jochem Verrelst. 2021. "Vegetation Types Mapping Using Multi-Temporal Landsat Images in the Google Earth Engine Platform" Remote Sensing 13, no. 22: 4683. https://doi.org/10.3390/rs13224683
APA StyleAghababaei, M., Ebrahimi, A., Naghipour, A. A., Asadi, E., & Verrelst, J. (2021). Vegetation Types Mapping Using Multi-Temporal Landsat Images in the Google Earth Engine Platform. Remote Sensing, 13(22), 4683. https://doi.org/10.3390/rs13224683