1. Introduction
Herbicide usage provides crop producers with multiple benefits, including increased crop yield, timely and affordable management, reduced weed pressure, and reduction in soil structure degradation caused by conventional tillage methods [
1,
2,
3]. Scientific advancements in the 1990s supported the development of a transgenic herbicide-resistant soybean varieties that allowed crop producers to spray broad-spectrum herbicides to kill weeds with no concern of harming their crops [
4]. However, dependency on the effectiveness of herbicide applications has led to overuse through continuous growth of herbicide-resistant crops and the application of the associated weed control agent [
5]. In 2010, 93% of all soybeans grown in the USA were herbicide-resistant, as were 78% of all cotton and 70% of all maize varieties [
6]. This overuse has caused genetic shifts in weed populations resulting in the success of resistant biotypes [
7,
8]. Studies estimate that herbicide-resistant management (HRM) has increased herbicide costs in states such as Iowa by
$20–40 per acre from 2013–2017 [
9].
Glyphosate (
N-phosphonomethyl-glycine) is one of the most common herbicides in production agriculture [
10]. Developed in 1974, glyphosate is a non-selective herbicide that inhibits the enzyme enolpyruvyl shikimate-3-phosphate synthase (EPSPS) from developing amino acids required for protein synthesis [
11]. Additional symptoms of glyphosate application include photosynthetic rate reduction, inhibition of growth, and chlorosis of plant tissue [
12]. The highly effective herbicide quickly established widespread use by crop producers, accelerating the evolution of resistance mechanisms within weeds [
13]. Moderate resistance is achieved in some weeds by mutations that occur at the targeted enzyme. However, in some species the translocation of glyphosate through the non-targeted parts of the plants (i.e., plant leaves) reduces the herbicide’s ability to reach the root and apical meristems where the inhibition of EPSPS can occur [
6].
Distinguishing susceptible and resistant populations of weeds is a challenging task. Prior to herbicide application, there is no significant difference in the visual appearance of resistant and susceptible weeds of the same species that can be noted during scouting [
14]. Hyperspectral systems to detect differences between resistant and susceptible biotypes show potential in controlled environments, but their effectiveness is drastically reduced once introduced to field conditions [
15]. Lab testing for an accumulation of shikimic acid within plant leaves is one method used to identify glyphosate resistance, but its lack of practicality does not justify its use in large scale applications [
16]. The development of a method that can indicate herbicide resistance within an acceptable timeframe after application has great potential to help growers manage their fields more effectively [
17].
Researchers at North Dakota State University (NDSU) pursued an alternative method of herbicide resistance detection that utilized thermal imaging technology [
18]. Thermal imaging has shown potential in detecting plant canopies that are experiencing increased levels of stress and reduced rates of photosynthesis [
19]. The application of glyphosate to susceptible plants causes a reduced photosynthetic rate due the inhibition of stomatal conductance [
20]. The reduction in stomatal activity lowers the ability for transpiration of water to be performed within the plant leaf, therefore resulting in increased leaf temperature [
21]. The study hypothesized glyphosate-susceptible plant canopies would emit a significantly higher temperature than resistant canopies and that the temperature differences could be recorded using a thermal imager. It was reported that glyphosate-susceptible populations of ragweed, waterhemp, and kochia had higher canopy temperatures in comparison to resistant populations after glyphosate [
22]. The canopy temperature values were then used to train a support vector machine (SVM) classifier that could identify the weeds that exhibited glyphosate resistance with accuracies exceeding 90% for all three species [
18].
Subsequent greenhouse studies were performed with the objective of validating the hypothesis that glyphosate-resistant weeds can be identified using thermal imagery [
18]. In these studies, glyphosate was applied to populations of waterhemp, kochia, common ragweed, and redroot pigweed and monitored with hourly image captures from a thermal camera [
22]. The weeds selected were determined to be most relevant to North Dakota agriculture and showed the most potential for glyphosate resistance [
23,
24,
25]. The SVM classification strategy was once again utilized to validate the original findings as well as one tailed t-testing to investigate if glyphosate-susceptible weeds consistently maintained higher canopy temperatures than glyphosate-resistant weeds.
Analogous to thermal sensing, multispectral sensing is also used extensively within agriculture [
26,
27,
28]. Multispectral sensing is the practice of using one sensor to image multiple areas of the light spectrum at the same time [
29]. When paired with Unmanned Aerial Vehicle (UAV), multispectral sensing payloads have proven to be powerful detectors of biophysical characteristics of vegetation during the growing season [
30]. Multispectral cameras capture image data within specified wavelengths of the electromagnetic spectrum, most commonly in the blue, green, red, red-edge, and near-infrared (NIR) wavelengths. However, some sensors such as the Micasense Red-Edge MX Dual Camera are capable of capturing up to ten different wavelengths including visible and non-visible, instantaneously [
31].
The high spatial and spectral resolution provided by UAV-assisted multispectral cameras can be used for a variety of agricultural applications including high-throughput phenotyping, disease identification and severity analysis, nutrient management, and weed identification and mapping [
32,
33]. Rapid identification of plant height, canopy cover, vegetation index, and flowering stage was performed in cotton fields to enhance breeding using multispectral images over multiple stages of the growing season [
34]. Potato late blight disease severity was measured using leaf and canopy measurements from the red and red-edge wavelengths with classification accuracies as high as 89.33% [
35]. Optimal, site specific, nitrogen fertilizer rate was investigated by Thompson and Puntl. Their use of multispectral sensors reduced nitrogen application rates by approximately 31 kg N ha
−1 without causing yield losses and improved nitrogen use efficiency by as much as 18% [
36]. Finally, computational deep learning with multispectral images provided a practical solution to identifying weeds in a sugarbeet field by detecting subtle differences in shapes and reflectance patterns of their leaf canopies [
37].
The introduction of newer, higher resolution thermal imaging systems that are compatible with UAVs have boosted the practical use of thermography in agriculture [
38,
39,
40,
41]. UAV thermal remote sensing applications include monitoring plant water stress, detection of diseases, and plant phenotyping [
42,
43,
44]. It was reported that UAV thermal sensing could also offer remote sensing data for orchard management including water management by observing the fruit-tree canopy temperature variations [
45,
46,
47]. Remote thermal sensing could enable real-time site-specific management techniques such as crop and weed identification, yield prediction, and crop stress assessment when combined with machine learning [
46,
48]. Thermal measurement as complementary to other sensor measurements such as hyperspectral, visible, and optical distance has also proved to be more effective on field scale crop phenotyping [
49,
50,
51]. In example, complementary sugar beet canopy temperature measurements with UAV infrared and Red, Green, and Blue (RGB) measurements were proved to improve the accuracy of UAV thermal measurements at altitudes below 40 m [
52]. Another direct use of UAV thermal remote sensing can be given as nitrogen fertilization management with spatial clustering models [
53,
54]. Most of these applications are used to monitor crops, and the investigation of other types of vegetation within agricultural systems is needed. Weed control is a critical component in large-scale farming and the unexplored potential of thermal imagery using UAVs could boost the capabilities of site-specific weed management technology [
55]. Therefore, the UAV-assisted thermal imagery could be used as a practical solution to identify glyphosate-susceptible and glyphosate-resistant weed populations based on canopy temperature. Particularly, the study in this paper extends the work previously accomplished in greenhouse environment to a field evaluation [
22].
The objective of this study was to identify herbicide resistance after glyphosate application in true field conditions by analyzing the thermal and multispectral response of weed species of waterhemp (Amaranthus rudis), kochia (Kochia scoparia), common ragweed (Ambrosia artemisiifolia), and redroot pigweed (Amaranthus retroflexus).
2. Materials and Methods
2.1. Experiment Site and Data Collection
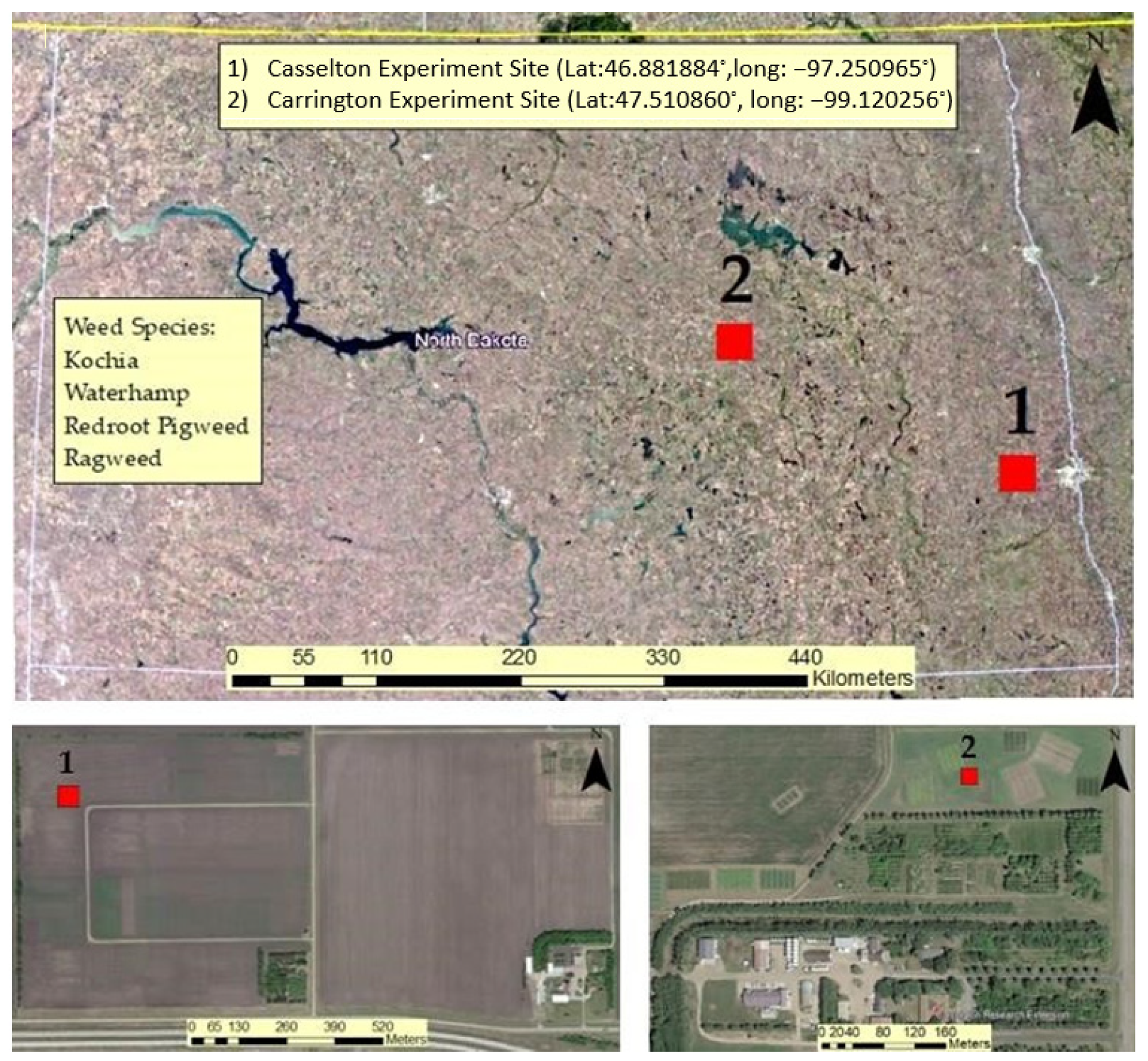
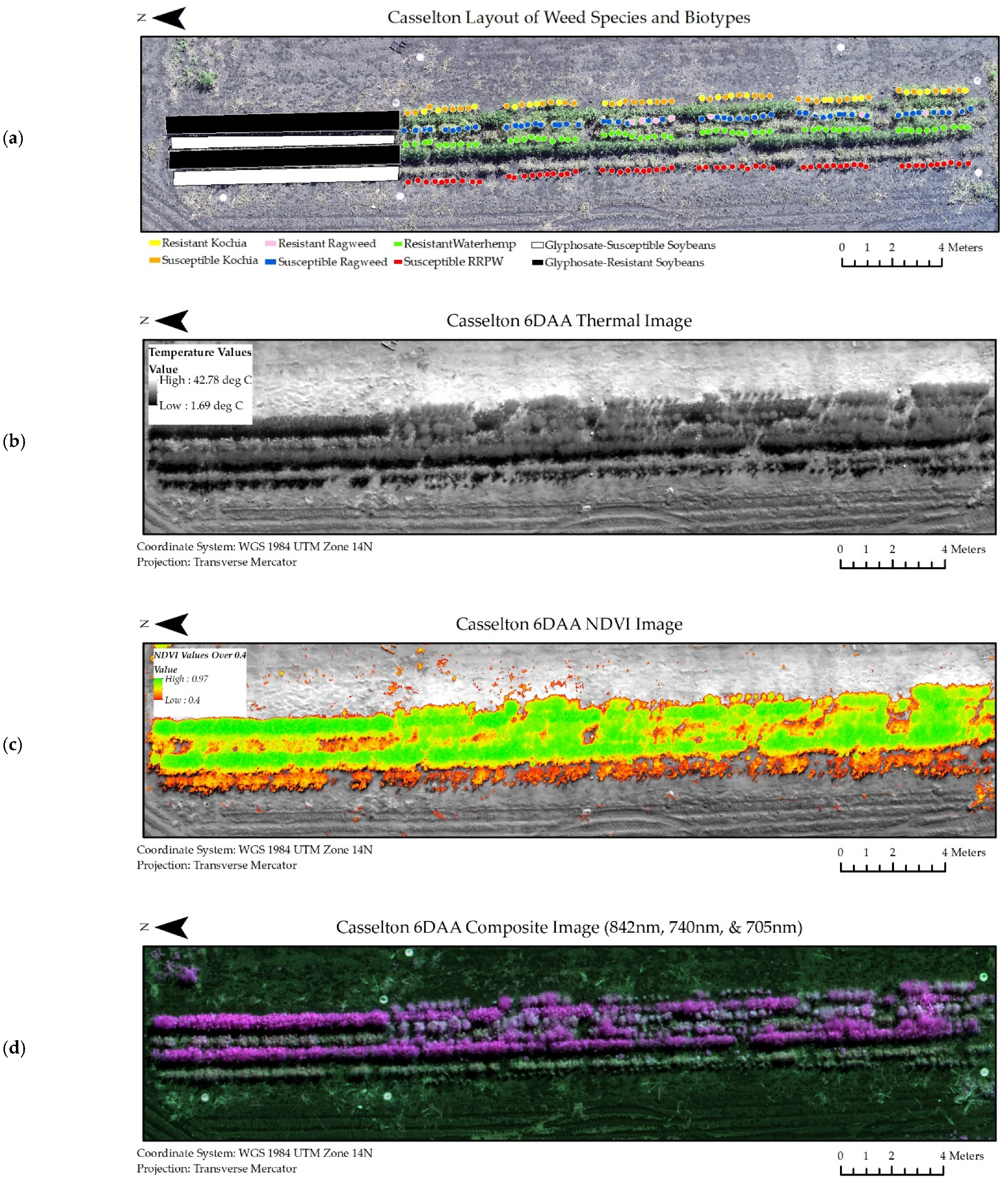
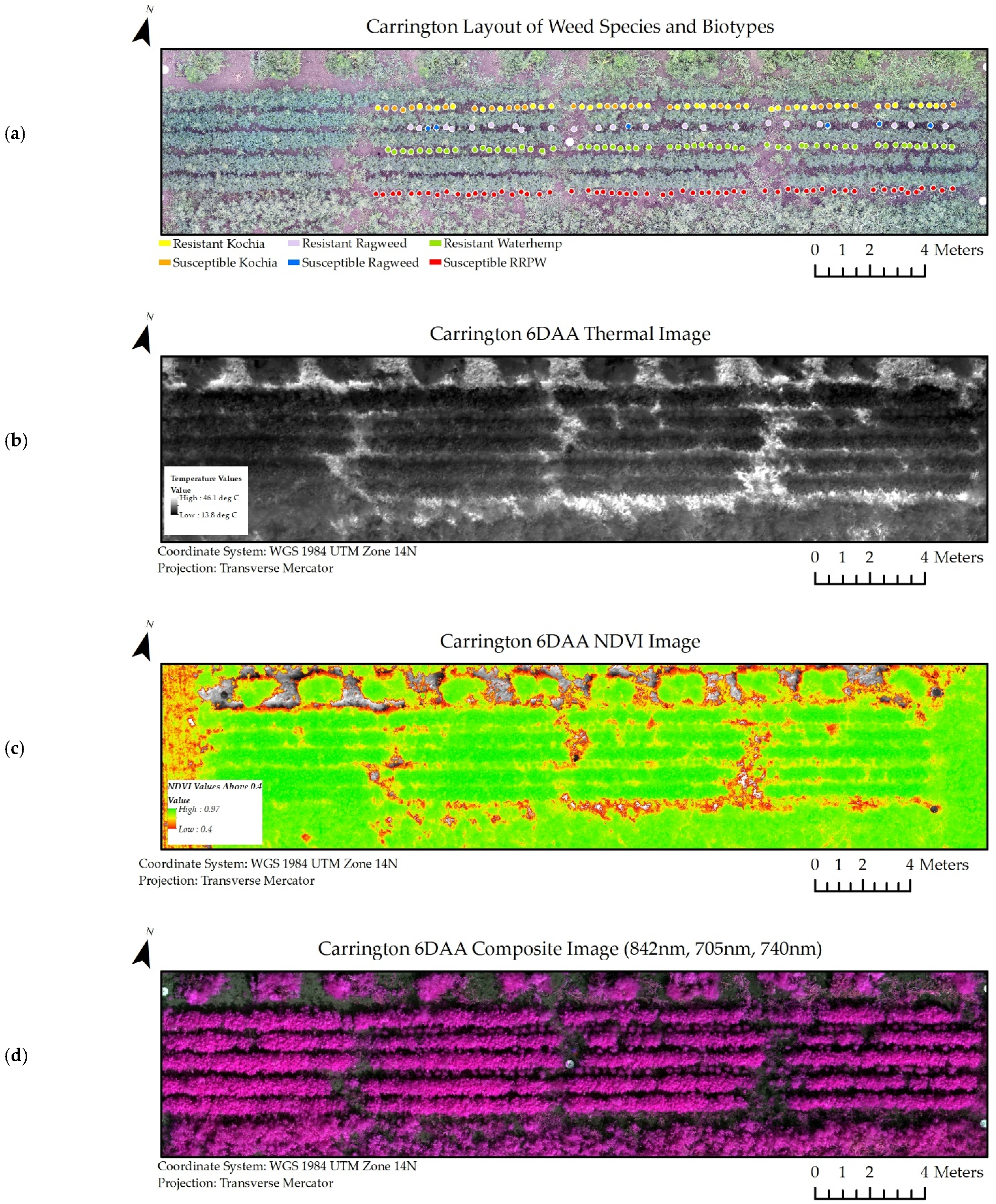
The experiment was conducted at two locations. One location was the NDSU Agronomy Seed Farm in Casselton, ND, USA while the other was conducted at the NDSU Research and Extension Center in Carrington, ND, USA (
Figure 1). Each location contained a plot measuring approximately 33 m in length and 3.5 m in width (115 m
2). Data collections were performed from the middle to end of August 2020 while all the plants were in vegetative growth stage. At the Casselton location, a combination of Roundup Ready 2 Xtend and ND Stutsman conventional soybean was planted in alternating fashion in 4 rows with 76 cm (30 inch) row spacing. A center-pivot irrigation system was not available at this site, so water was provided to the weed plants using a truck-mounted water tank.
At this location, the soil series was predominantly Kindred-Bearden silty clay loams that are somewhat poorly drained and nonsaline [
56]. Buckets of soil were collected at the location and brought to the Agricultural Experiment Station Greenhouse at the NDSU campus in Fargo, ND to be autoclaved. Once the autoclave process was complete, the soil was used to germinate the weed populations in greenhouse conditions at another location on campus. The soil was distributed into 9 cm square pots with 13 cm height and weed seeds were placed at approximately 3 cm soil depth. A total of 60 kochia plants, 60 waterhemp plants, 60 redroot pigweed plants, and 30 ragweed plants were successfully grown and transplanted to the field (
Figure 1). To increase plant population, a selection of naturally occurring ragweed plants was transplanted from site location and introduced to the plot, resulting in a total number of 59 ragweed plants. The weed populations were comprised equally of two different biotypes, one being selected for glyphosate resistance and the other for glyphosate susceptibility. Glyphosate-susceptible waterhemp was not available when the experiment was conducted, so redroot pigweed was used as a surrogate. Plants were organized in a randomized complete block design based on their believed resistance status and planted in between the soybean rows with one species occupying a single row at a time. When the weeds were approximately 12–15 cm tall, 2 L/ha of Roundup Powermax (48.7% glyphosate) with Class Act NG at 2%
v/
v was applied to induce symptomology on the susceptible biotypes.
At the Carrington location, five rows of Roundup Ready 2 Xtend (Bayer, Whippany, NJ, USA) Soybeans (Glycine Max) were planted with 76 cm row spacing. A center pivot irrigation system at this location was utilized to provide a constant water source for the plot. The soil series present at this location is predominantly Heimdal-Emrick (G229B) loams which are well drained and slightly saline [
57]. Buckets of soil were also collected at this location and brought to the Agricultural Experiment Station Greenhouse at NDSU in Fargo, ND to be autoclaved. The soil was then returned to a greenhouse located at the Carrington location where weed populations were grown in 8 cm diameter pots. A total of 60 kochia plants, 60 waterhemp plants, 60 redroot pigweed plants, and 30 ragweed plants were successfully grown and then transplanted to the field plot in randomized fashion. When the weeds were approximately 12–15 cm tall, 2 L/ha of Roundup Powermax (48.7% glyphosate) with Class Act NG at 2%
v/
v was applied to induce symptomology on the susceptible biotypes.
2.2. UAV Equipment and Flight Parameters
Image data collection from the experiment sites was performed using a Zenmuse XT2 RGB/Thermal camera (DJI Technology Co., Ltd., Shenzhen, China) and a Micasense Red-Edge MX Dual camera System (Micasense, Seattle, WA, USA). The Zenmuse XT2 provided both RGB and thermal image data, but only the thermal image data were used for testing. The Red-Edge MX Dual camera system provided ten bands of spectral data. Imagers on the dual camera provided a selection of imagery around the blue, green, red, red-edge, and NIR wavelengths. Both systems were mounted simultaneously on a DJI M600 Pro UAV (DJI Technology Co., Ltd., Shenzhen, China).
Due to restrictions with the flight planning software, simultaneous image capture for both systems could not be performed at an altitude less than 25 m. In addition, the Zenmuse XT2 had lower pixel resolution than the Red-Edge MX Dual camera requiring lower altitude flights for thermal image collection for proper image processing. Therefore, an 8 m manual flight was conducted solely using the Zenmuse XT2 while separate automated flights were performed at 10 m while capturing imagery with the Red-Edge MX Dual Camera system. Automated flights for the Red-Edge MX Dual Camera were planned and performed using Pix4D capture mobile app on iOS. This approach allowed for greater spatial resolution with the thermal camera, as the XT2 has a lower resolution than the Red-Edge MX Dual Camera system. Image data captured with the Red-Edge MX Dual Camera were calibrated using a provided reflectance panel from Micasense to transform raw pixel values to absolute reflectance. Imagery was captured at 4 and 6 DAA at both locations. An extra flight was performed 8 DAA at Casselton. Undesired weather conditions at the Carrington site during the 8 DAA time period prevented a flight from being performed. The weather conditions for each flight are listed in
Table 1. The weather conditions during the remaining data collection times were mostly free of clouds, at most sparsely cloudy.
Georeferencing for the imagery was performed by the inclusion of ground control points (GCPs). The GCPs consisted of white 5-gallon bucket lids with colored stakes driven through the center of them to provide a distinct center point. A Trimble Geo-7x Handheld Data Collector and Zephyr 3 for Global Positioning System (GPS) antenna (Trimble Geospatial, Westminster, Sunnyvale, CA, USA) was then used to capture the GCP locations with 2 cm accuracy. Five GCPs were placed at each site with four points at the field corners and one point at the center. In cases where thermal imagery was being captured, cold water was placed over the bucket lids to be easily visible in the imagery. In addition to GCP collection, GPS data were collected from the approximate centroid of each plant location for later use in mapping software.
Imagery was stitched into reflectance ortho-mosaics using Pix4Dmapper (Pix4D, Prilly, Switzerland). NIR (668 nm) and red (840 nm) wavelength imagery from the Red-Edge MX Dual Camera system were used to generate an additional Normalized Difference Vegetation Index (NDVI) mosaic. Approximately 150–200 image captures were taken per flight and used for mosaic generation. Ground control point data from the Trimble GPS were incorporated in the processing procedure to grant spatial accuracy as high as 2 cm. A complete list of flight operations and equipment parameters is summarized in
Table 2.
2.3. Extraction of Vegetation and Development of Classification Zones
Once the images were gathered from the experiments, they were processed into mosaics before visualizing in ArcGIS Pro (ESRI, Redlands, CA, USA). The plant GPS data were then overlaid as point shapefiles. The Buffer tool in ArcGIS Pro was then used to create 12 cm buffer shapefiles around the centroid of the pots. The buffer size selection was empirical and it was decided by the specialists at NDSU. Buffers were inspected for accurate placement in the imagery and corrected if necessary. Buffers were then selected and separated into their own respective species using the Clip tool. The visual survival evaluation results were then added to the shapefile attribute table to further separate the buffers into resistant and susceptible biotypes within each species.
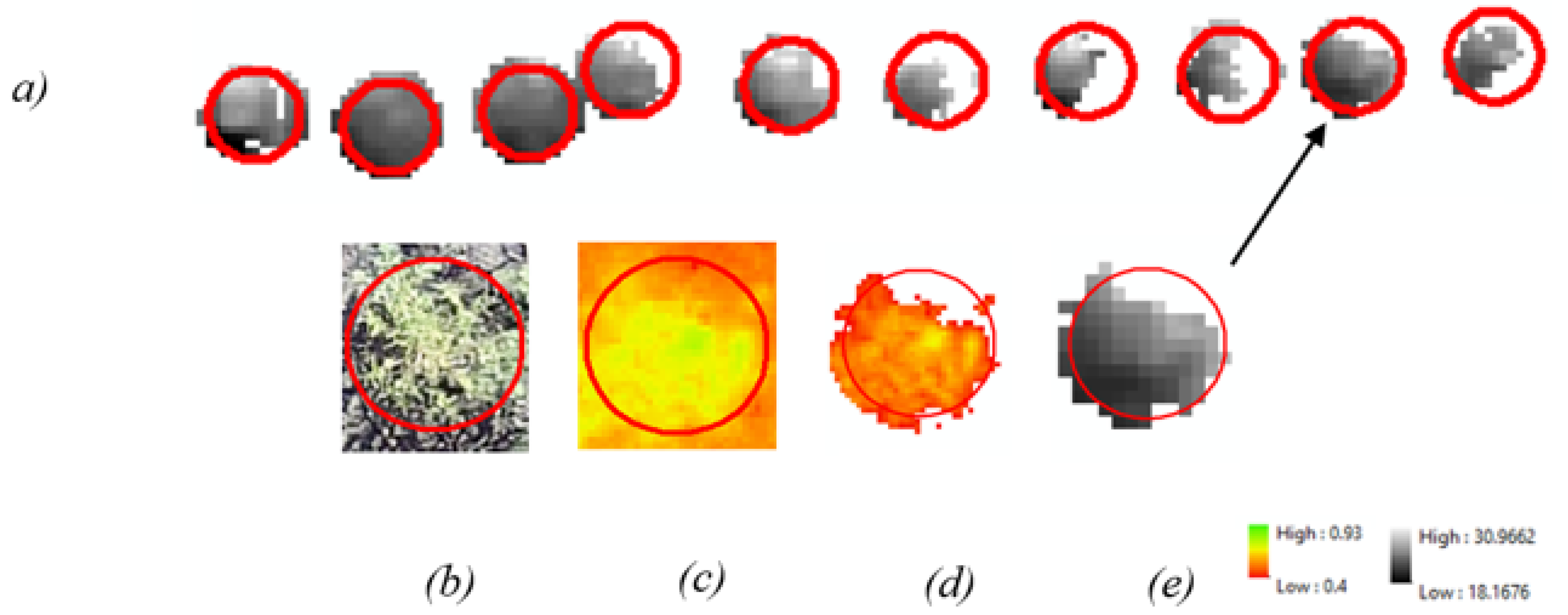
The buffers were then used to extract 12 cm diameter raster information from each image dataset, vastly reducing the amount of imagery so that only the plant locations would be subjected to further processes. This approach, however, still left a mixture of soil and vegetation within the buffers. To increase the extraction accuracy even further, the Extract by Attributes tool was used to extract pixels from the buffers that had an NDVI value greater than 0.4. This action removed the soil from the buffers so that only vegetation would be displayed. The NDVI output was then used to remove soil pixels from the thermal and multispectral raster using the Extract by Mask tool. The complete extraction process is illustrated in
Figure 2.
Sets of buffers were created for each species and separated into six classes based on their resistance status. The classification was made as magnitude of glyphosate resistance where zero indicated dead plants while five indicated plants with no symptoms. The magnitude of resistance (MoR) indicated increasing resistance as the numbers go up from zero to five where one indicating more symptoms while four indicating lesser symptoms on plants.
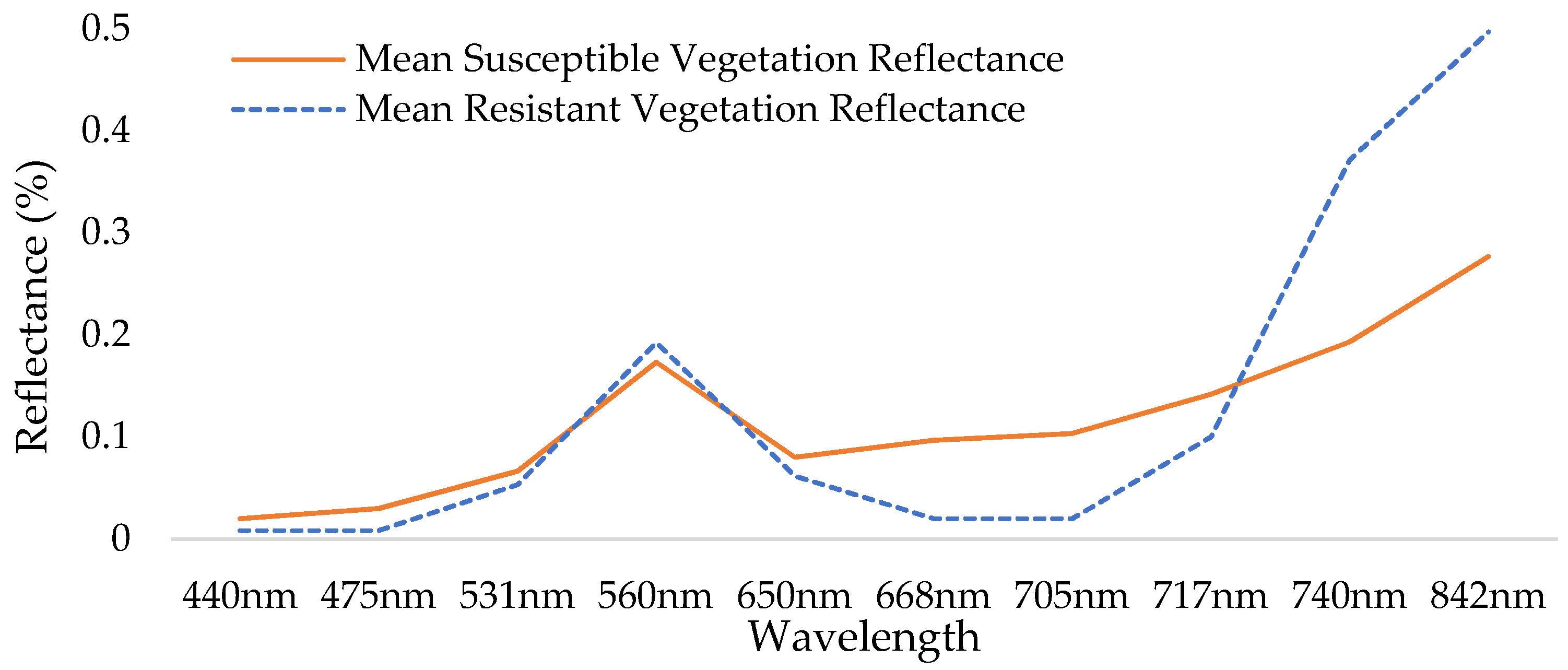
In addition to thermal extraction from the Zenmuse XT2, extractions of NDVI and a 3-band composite image from the Red-Edge MX Dual Camera system were also made to serve as comparisons. By using the Spectral Profile tool within ArcGIS, the reflectance of glyphosate-resistant vegetation and glyphosate-susceptible vegetation were compared at each of the ten bands provided by the Red-Edge MX Dual Camera system.
2.4. Raster Classification of Glyphosate-Resistant and Glyphosate Susceptible Weeds
Once the buffered and extracted datasets were created, they were then classified using the Image Classification Wizard in ArcGIS Pro. Training zones were created over the plant locations using the buffer shapefiles that were separated based upon resistance status and then conjoined to create a training template containing two classes: glyphosate-susceptible vegetation and the other being glyphosate-resistant vegetation. Each classification was performed on each species independent from one another except in the case of waterhemp and redroot pigweed. In addition to weed classifications, a classification was made between the Round-up Ready soybean and conventional Stutsman soybean at Casselton 8 DAA to see if thermal classification performance could be greatly improved when dealing with known opposing MoR ratings.
Pixel based image analysis was used to classify the biotypes. Three classification methods were used to classify each species raster dataset for each of the three days. Data were collected to compare classification accuracy between the imaging systems and classification methods. Maximum likelihood, random trees, and support vector machine were the three classification methods used [
58,
59,
60]. The support vector machine classification method utilized only a subset of the pixels included in the raster datasets to act as training data for the classifier. The maximum samples per class was set to the default value of 500 pixels for each class. The random trees classifier similarly used only a subset of pixels but with a default value of 1000 pixels.
2.5. Accuracy Assessments of Thermal, NDVI, and Wavelength Composite Classifications
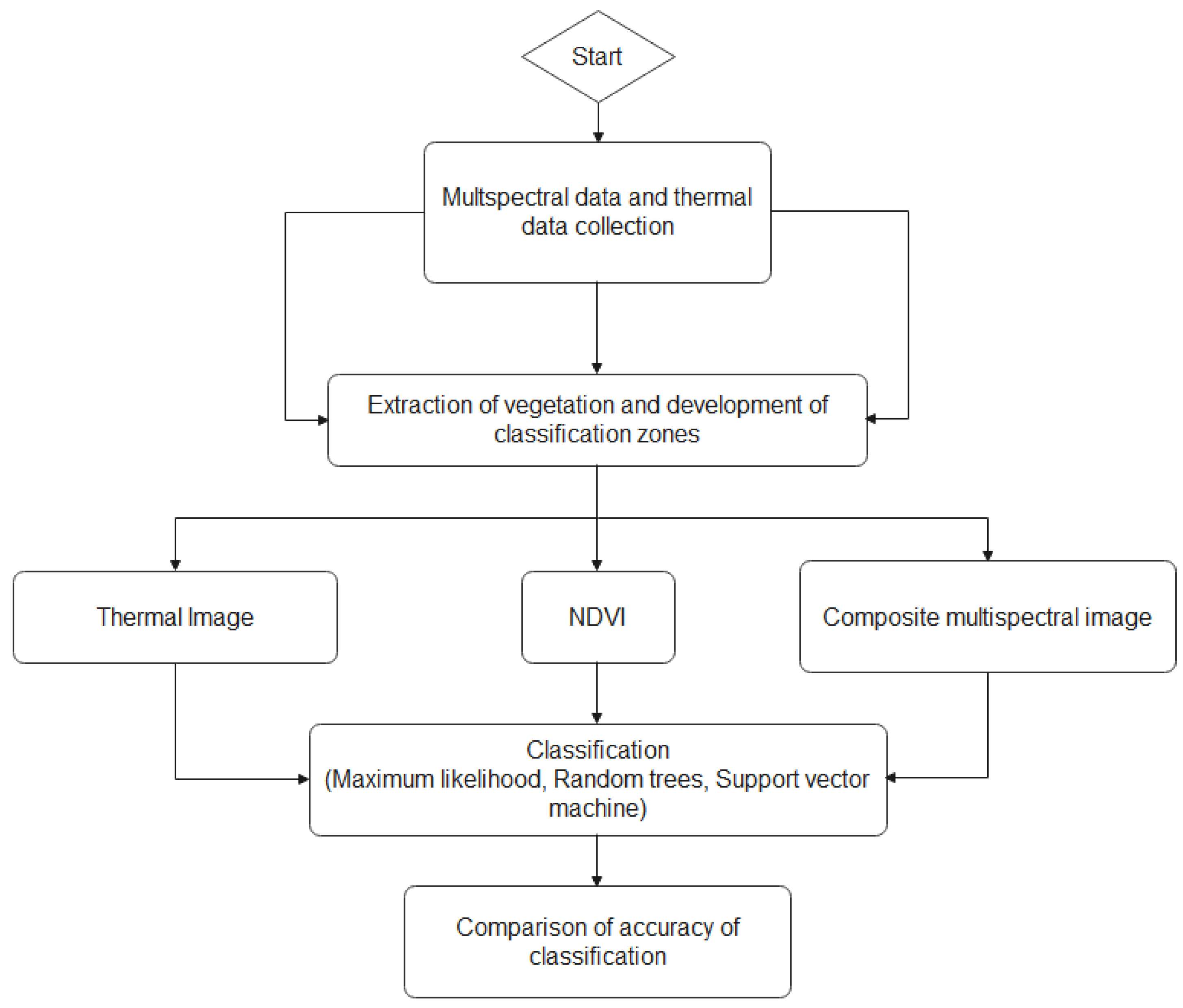
To test the accuracy of the generated classifications, the Create Accuracy Assessment tool within ArcGIS Pro was used to digitize ground truth points within each classification raster’s extents. Pixels that belonged to plants that were determined to be glyphosate-susceptible within the survival evaluation were assigned the value of 0, while pixels that belonged to a glyphosate-resistant plant were assigned a value of 1. Approximately 1000 points were used for every species. The points were then updated by recording the values of the point locations observed in the classification raster, which provided a shapefile with both ground truth and classification fields with raster values ranging from 0–1. The Compute Confusion Matrix tool was then used to observe the accuracy and kappa coefficient of each classification attempt.
Figure 3 showed the image processing and prediction analysis steps for the weed classification in this study.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}