1. Introduction
Synthetic aperture radar (SAR) is a powerful active microwave remote sensing system that can be used in almost all weather and time conditions. It is widely used in earth observation applications, such as environmental monitoring, disaster monitoring, resource exploration, mapping, and military applications [
1,
2,
3,
4,
5]. High-resolution wide-swath (HRWS) imaging is one of the most important imaging purposes for next-generation spaceborne SAR missions. However, for conventional spaceborne SAR systems, wide swaths require a lower pulse repetition frequency (PRF), which will limit the azimuth resolution. Hampered by this contradiction, conventional spaceborne SAR cannot acquire imaging capacities of high resolution and wide swaths simultaneously [
6,
7]. To overcome this problem, multiple new technologies and modes have been proposed in recent years, such as signal reconstruction [
8,
9], space-time adaptive processing (STAP) [
10], and digital beamforming (DBF) [
11,
12,
13,
14]. Among them, multiple multi-channel azimuth beams in elevation are among the most effective methods to improve the HRWS imaging capacity. Using multiple azimuth beams allows the use of a smaller PRF, which can make SAR achieve wide-swath imaging without the deterioration of azimuth resolution. At the same time, using a wide transmit beam to illuminate a wide imaged swath means a low transmit antenna gain and a large multi-channel receive antenna in elevation can compensate for the low transmit gain [
15,
16,
17].
To receive echoes from the whole wide swath and improve the receiving gain, the large receive antenna is evenly divided into multiple sub-apertures in elevation, and received echoes from all sub-apertures are separately amplified, down converted, and digitized to obtain digital baseband echo signals. Consequently, baseband echoes from all channels are combined by an onboard digital beamforming (DBF) processor to form a high-gain pencil beam to scan the reflected echoes. This beamforming operation for echo reception in elevation is known as scan-on-receive (SCORE) [
18,
19]. The real-time steering direction of the receiving antenna pattern is achieved by selecting the scan angle as a function of the range time. Due to the flexibility of the sharp high-gain receive beam, DBF in elevation can be used to improve the energy of received echoes and suppress range ambiguities and spatially localized interferences [
20]. In addition to the signal-to-noise ratio (SNR) improvement, ambiguity suppression, and anti-interference, DBF could also be adopted for echo separation in multiple innovative imaging modes [
21,
22]. Therefore, DBF in elevation could be widely adopted in next-generation spaceborne SAR missions.
During the whole echo-receiving interval, the elevation of the steering direction of the sharp receive beam always points to the center of the pulse extent on the ground. However, the transmitted chirp signal with a long pulse duration extends on the ground, leading to simultaneous arrival from slightly different look angles. For a long transmitted pulse, the scanning narrow beam attenuates part of the pulse so as to reduce the receiving gain, which is called pulse extension loss (PEL) [
23,
24]. PEL is defined as the ratio of pulse power available at the antenna terminals for a given beam steering angle to the total pulse power [
23], and it can deteriorate the SAR system’s receive power and leads to a signal-to-noise ratio (SNR) reduction. In order to decrease the PEL, the DBF processor with single-group time delays is introduced [
25,
26]. For a spaceborne SAR system with a low resolution or/and a narrow swath, echoes of all receive channels in elevation can have good coherence before being combined, and almost the maximum receive gain can be obtained using the DBF processor with single-group time delays. However, with the improvement of the swath width, the deviation between the desired time delay and the operated time delay in the single-group time delays is increased, especially for both edges of the imaged large swath, which leads to clear receive gain reduction. Furthermore, for a fixed time-delay error, the larger transmitted pulse bandwidth corresponding to a higher-range geometric resolution brings a greater range sampling offset, which also results in the increased PEL in the conventional DBF processor.
Therefore, the improved DBF processor with multi-group time delays and the improved DBF processor with multi-frequency time delays are two effective methods to further reduce the PEL in the conventional DBF processor. The improved DBF processor with multi-group time delays adopts multi-group time delays instead of single-group time delays in the conventional DBF processor, which can provide more accurate time delays for PEL compensation in the whole imaged wide swath. The key point of this method is the large imaged swath is divided into multiple small sub-swaths, and the side-looking angle of the small swath can be more accurately approximated as a linear function of the range time. The improved DBF processor with multi-frequency time delays is mainly made up of multi-group phase-shifting processors and band-pass filters (BPFs). Echoes from all elevation channels are processed by phase-shifting processors with different frequencies, which can control the direction of the scanning beam according to different carrier frequencies, and then phase-shifted echoes of all elevation channels are combined. Afterward, the combined signals are filtered by different BPFs, and the resulting filtered signals are summed to obtain radar echoes with high gain and full bandwidth. The key point of this method is the large pulse bandwidth is divided into multiple small sub-bands, and the small sub-band is related to the negligible range sampling offset.
However, the improved DBF processor with multi-group time delays needs to restore additional raw data to avoid the raw data conflict during range pulse compression. Furthermore, the amount of the output raw data is increased with the transmitted pulse duration. Limited by the onboard data downlink capability in spaceborne SAR, it is necessary to reduce the size of the downlinked raw data as much as possible. A major drawback of the digital beamformer with multi-frequency time delays is that echoes will clearly be affected by channel imbalance including amplitude and phase during range frequency bandwidth division and synthesis processing. The amplitude and phase imbalance between different sub-bands will introduce range pulse compression performance degradation. Furthermore, with the increase in sub-bands, the amplitude and phase imbalance estimation and compensation become more difficult. In this paper, an improved DBF processor with multi-frequency and multi-group time delays is proposed, and the multi-group time delays with the small sub-band could provide more accurate range offset compensation. First, the large bandwidth is suggested to be divided into two sub-bands, and the channel imbalance between different sub-bands will be more easily estimated and compensated. Consequently, for the same range offset compensation effect, the number of time delay groups could be reduced to avoid the clearly increased raw data. Therefore, the proposed DBF processor makes full use of the advantages of the presented two methods and provides more accurate time delays for the whole imaged swath.
This paper is organized as follows. In
Section 2, the received multi-channel signal model in spaceborne multi-aperture DBF SAR in elevation is derived, and the reason for the residual PEL of the conventional DBF processor in HRWS SAR is analyzed. To reduce the PEL, two improved DBF processors are presented, and their drawbacks are analyzed in
Section 3. The proposed DBF processor with multi-frequency and multi-group time delays is presented in
Section 4. Simulation experiments on both point and distributed targets are carried out to validate the proposed DBF processor in
Section 5, and conclusions are drawn in
Section 6.
2. Conventional Onboard DBF Processor and Analysis
The imaging geometric model of spaceborne DBF-SCORE SAR is illustrated in
Figure 1. A wide beam in elevation is used to illuminate the whole imaged swath, and the large planar phased antenna is adopted to receive echoes from the whole swath. The large receive planar phased antenna is divided into
N sub-apertures, which are evenly spaced in elevation. As shown in
Figure 1, there are three point targets in the imaged swath: the targets
and
are located at the edge of the swath, and the target P is an arbitrary target in the imaged swath.
The transmitted chirp signal in spaceborne SAR is assumed and can be expressed as:
where
t represents the range time,
T is the transmitted pulse duration,
is the chirp rate, and
indicates the carrier frequency. Echoes received by each sub-aperture are amplified, down converted, and digitalized to the digital baseband signal. The baseband echoes of the point target P received by the
n-th sub-aperture can be expressed as:
where
is the serial number of receive sub-apertures, and
is the time delay from the pulse transmitting to its corresponding echo of the point target P arriving at the
n-th sub-aperture in elevation. Taking the first sub-aperture as a reference, time delay
can be expressed as:
where
is the wave propagation time from the transmit channel to the target and then back to the first channel,
is the spacing interval between adjacent sub-apertures,
is the looking angel of the target P,
is the angle between the antenna normal and the vertical direction, and
c is the speed of the light. Afterward,
is rewritten as follows:
From Equation (4), echo signals of all sub-apertures differ from each other by the time delay and the exponential term. In order to make the signals received by different sub-apertures have a good correlation in the whole receiving window before combining them, the time delay and the exponential term should be properly compensated. According to the principle of electronic beam steering in the phased array antenna, the phase shift by the conventional DBF processor in the
n-th sub-aperture to form a time-varying, high-gain, narrow-scanning receive beam can be expressed as:
with
where
H is the satellite altitude,
is the radius of the earth, and
is the instance distance at time
t. Afterward, following the phase compensation, the echo signal from the target P received by the
n-th sub-aperture can be expressed as [
16]:
where
is the range time when the beam points to the target P, and
is the side-looking angle of the target P. However, it is impossible to ensure that echoes received by different sub-apertures have good coherence when merging only using phase shifters to compensate the exponential term, and echoes will be affected by the PEL, resulting in the loss of the receive antenna gain. In order to improve the performance of the conventional DBF processor, single-group time delays are introduced after phase shifting [
25,
26]. The time delays are obtained by the linear approximation of
, which can be expressed as:
where
is the first-order derivative of the side-looking angle
at the range time
, and
is the selected reference time, which is usually selected as the time delay of the imaged swath center. Substituting (8) into (7), the spectrum of the echo received by the
n-th channel in elevation can be expressed as [
16]:
Consequently, the time delay in the
n-th sub-aperture in elevation for range time compensation can be expressed as:
The first term is related to the second part of (3), while the second term is used to reduce the PEL due to the large transmitted pulse duration. Using the onboard DBF processor including phase and offset compensation, as shown in
Figure 2, the large receive antenna can form a sharp high-gain pencil beam to scan-on-receive echoes.
However, the linear approximation of
in (8) is not very accurate in the whole imaged swath, especially for the wide swath. Consequently, the single-group time delays cannot effectively reduce the PEL for the targets far away from the swath center, which will lead to the residual PEL. The residual PEL can be expressed as [
25]:
with
where
is the lagging edge of the pulse,
is the leading edge of the pulse,
indicates the time when the beam pointing to the center of the pulse, and
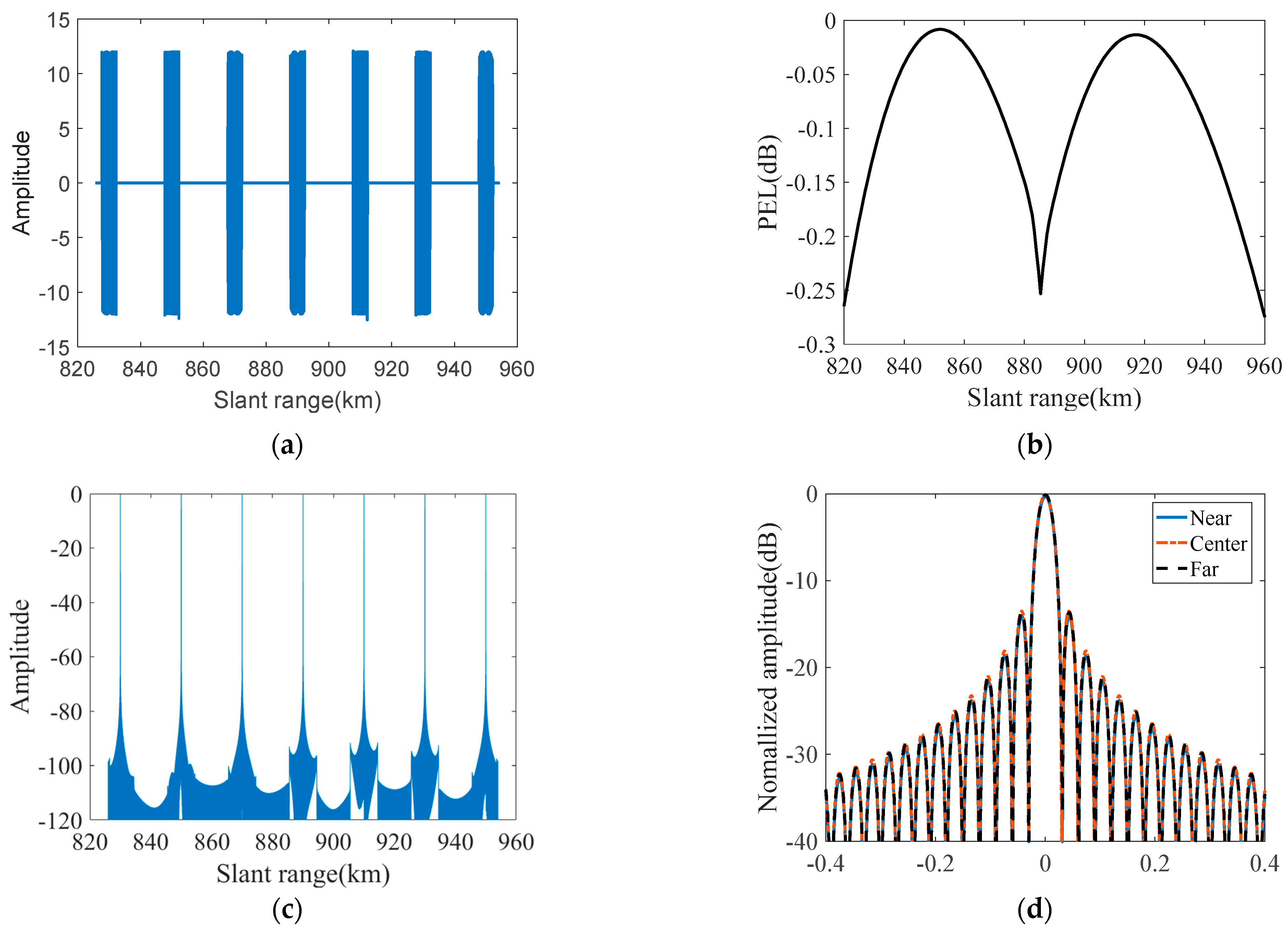
is the direction map with the beam pointing to the center of the pulse. With the simulation parameters listed in
Table 1, the simulation results processed by the conventional DBF processor are shown in
Figure 3. The signal amplitude modulation could clearly be observed in
Figure 3a, as the additional time delays for PEL compensation are not accurately carried out, especially for targets at both edges of the swath. As shown in
Figure 3c, if the reference time delay in (10) is selected as the time delay of the imaged swath center, the PEL in the near location in the swath is clearly higher than in the far. To minimize the PEL, the reference time
needs to be optimized. It can be seen that the signal amplitude modulation becomes small in
Figure 3b, and the worst PEL is reduced from −4.4 dB to −3.5 dB, as shown in
Figure 3d.
The linear approximation of
for the arbitrary target P in the whole imaged swath can be expressed as:
In addition to the target position, the range frequency should also be considered, since the pulse bandwidth is relatively large in HRWS SAR. Therefore, for the arbitrary range frequency
, the expected time delay of the
n-th channel for the arbitrary target P can be expressed as:
According to the operated time delay in (10) and the desired delay in (14), the time delay deviation can be expressed as:
According to (15), the time delay deviation is mainly affected by two parts. The first part of (15) is mainly determined by , and the point target P is closer to the selected reference slant range, the deviation would become smaller. The second one is determined by the range frequency, and the large pulse bandwidth will cause the large time delay deviation . Furthermore, in the discrete-time domain, the range offset relative to the geometric resolution is more important than the absolute time delay deviation . For a fixed time delay deviation, the range offset compensation could be ignored in DBF SAR with a narrow bandwidth, while the range offset must be considered and compensated in SAR with a large bandwidth. Therefore, according to (15), there are two ways to reduce the residual PEL. One is to provide more reference time delays for accurate time delay compensation, and the other is to divide the large pulse bandwidth into multiple sub-pulses.
4. Methodology of Proposed DBF Processor with Multi-Frequency and Multi-Group Time Delays
According to the above analysis in
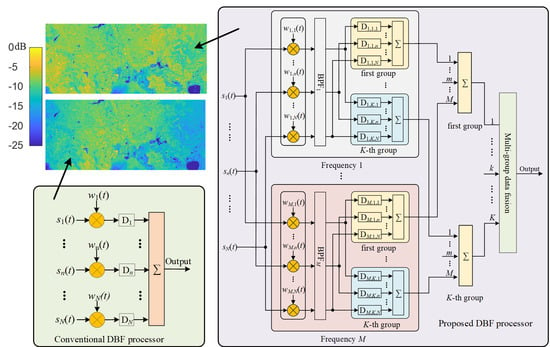
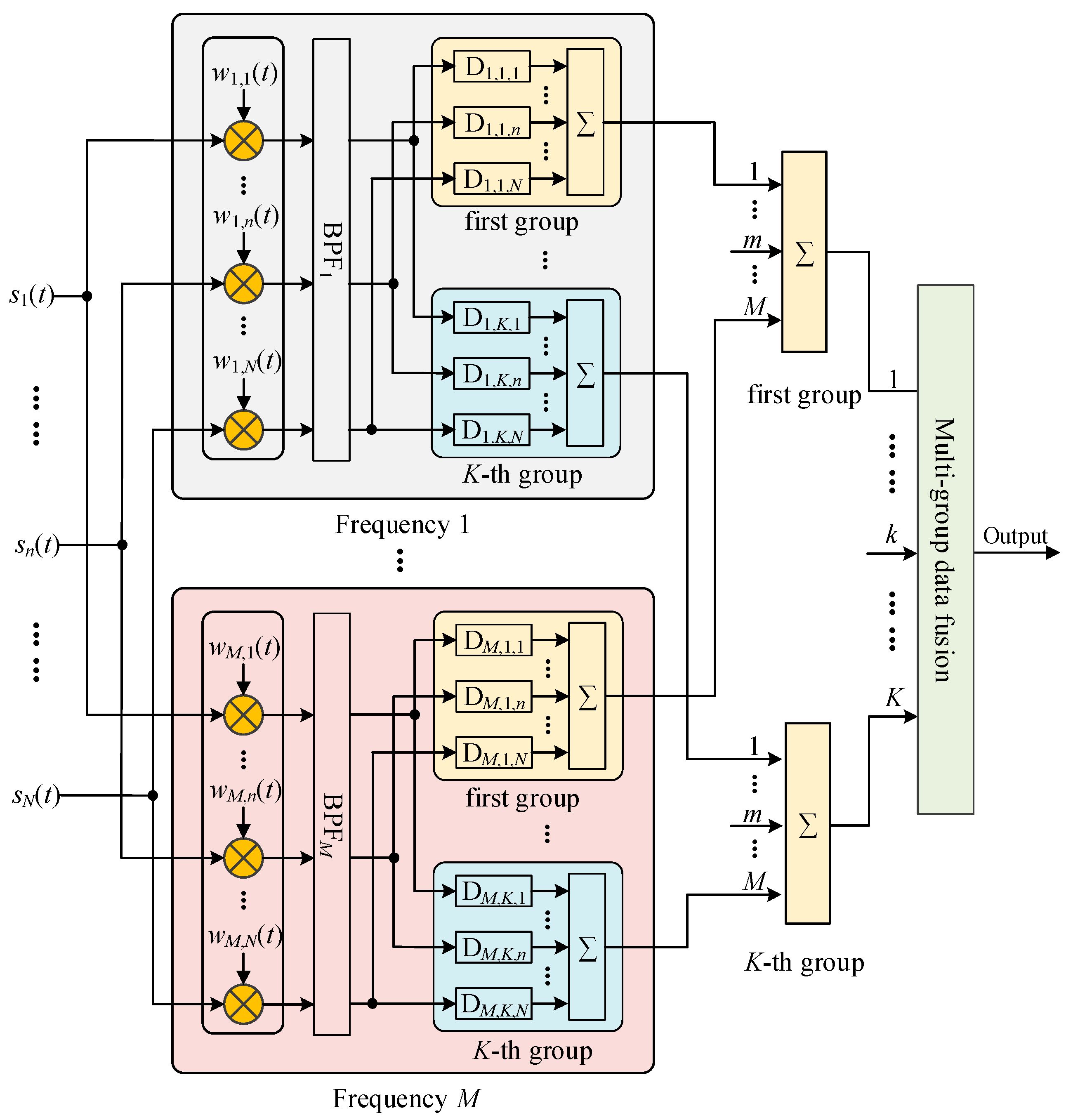
Section 3, both improved DBF methods could reduce the PEL but with unwanted drawbacks. To make full use of the advantages of the two improved DBF methods, a novel DBF processor with multi-frequency and multi-group time delays is proposed in this paper, and its flowchart is shown in
Figure 10. In
Figure 10, the number of channels, groups of time delay, and sub-bands are
N,
K, and
M, respectively. First, the multi-frequency phase-weighting vectors are multiplied to form sharp receive beams corresponding to different carrier frequencies before the transmitted pulse division. After the transmitted pulse division by BPFs, the multi-group time delays are introduced for compensation to improve DBF performances for each sub-pulse. After multi-channel raw data combination and sub-bands synthesis, the resulting raw data with different reference time delays compensation should be fused into single-channel data to reduce the recorded and downlinked raw data, as shown in
Figure 10.
In order to reduce range offsets between different channels in elevation in DBF SAR, the transmitted pulse with the long pulse duration and large bandwidth should be divided into several sub-pulses, and these sub-pulses are with different carrier frequencies and transmitted time delays. However, the transmitted pulse division is implemented in the frequency domain. The multi-channel raw data in elevation are multiplied by multi-frequency phase weighting vectors in the time domain to simultaneously form several sharp beams to the received echoes corresponding to different sub-pulses. The multiplied phase weighting of the
n-th sub-aperture corresponding to the
m-th sub-pulse can be expressed as:
with
After phase weighting, echo signals corresponding to the
m-th sub-pulse received by the
n-th sub-aperture can be expressed as:
Consequently, the transmitted pulse division is operated in the frequency domain by BPFs. Different from the improved DBF processor in
Figure 6, it is suggested to reduce the number of BPFs, since the amplitude and phase imbalance between different frequency sub-bands could be more easily estimated and corrected with fewer sub-bands. Another difference between the proposed DBF processor and the improved DPF processor in
Figure 6 is the time delay compensation for all sub-pulses, and it is implemented by multi-group time delays. The approximation of the time-varying looking angle of the
m-th sub-pulse can be expressed as follows:
where
is the
k-th selected reference time for the approximation of the time-varying looking angle of the
m-th sub-pulse. Afterward, the spectrum signal of the
m-th narrow sub-swaths received by the
n-th channel in elevation can be expressed as:
Therefore, with the phase weighting by the
m-th phase shift, the
k-th-group time delay for the
n-th channel in elevation can be expressed as:
The time delay of
K groups is evenly divided according to the time-varying angle. If the echo time of the
m-th frequency within the range time of the
k-th-group, the
k-th-group time delay is adopted in the frequency domain. The number of groups for time delays
K is obtained as follows:
where
indicates the rounding up operator,
and
are the time delay for the farthest and nearest targets in the whole imaged swath, respectively,
and
are the maximum and minimum of the transmitted pulse, respectively,
indicates the pulse bandwidth, and
is the acceptable maximum value of the time delay deviation for the desired PEL. In addition, to reduce the PEL, the reference time delay of the
m-th-group needs to be optimized. In the reference time optimization, the two-way time delay of the swath center is set to the initial reference time. Afterward, if the time delay deviation
in the near range is greater than in the far range, the reference time for linear approximation will be selected as the mean value of the original reference time and the two-way time delay of the near range. Otherwise, the reference time delay will be re-selected as the mean value of the original reference time and the two-way time delay of the far range. After about five iterations, the reference time is optimized, and the residual PEL is minimized.
The time delay can be realized by two methods, one is to use finite impulse response (FIR) filters to realize the pipeline processing in the time domain, and the other method is to realize the time delay processing by phase shift compensation in the frequency domain. Considering that the multiple sub-pulse signals need to be obtained in the frequency domain by BPFs, the phase shift compensation in the frequency domain is used to realize the time delay in this paper. Therefore, the
k-th phase shift of the compensated time delay for the
m-th narrow sub-swaths received by the
n-th channel can be expressed as:
After the time delay compensation, echoes from all elevation channels with the same sub-band and time delay group are combined. Afterward, echoes with different sub-bands are synthesized to form echoes with the whole transmitted bandwidth. Finally, echoes compensated by different time delay groups are fused to reduce the amount of raw data. It is suggested that the number of divided sub-bands should be small and preferably two, since the imbalance between different frequency sub-bands is more easily estimated and corrected in this case.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}