
Prediction of Forest Fire Spread Rate Using UAV Images and an LSTM Model Considering the Interaction between Fire and Wind

 , ,
, ,
Abstract
:1. Introduction
2. Data Collection and Preprocessing
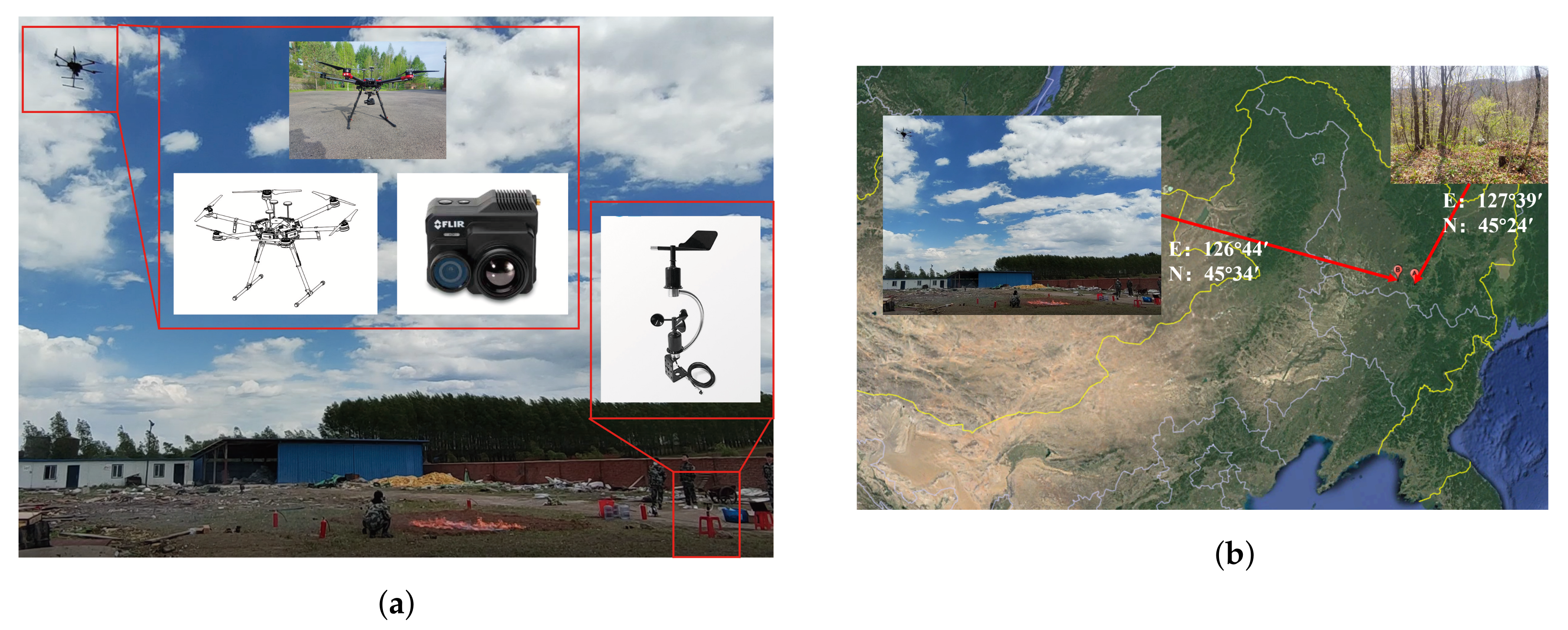
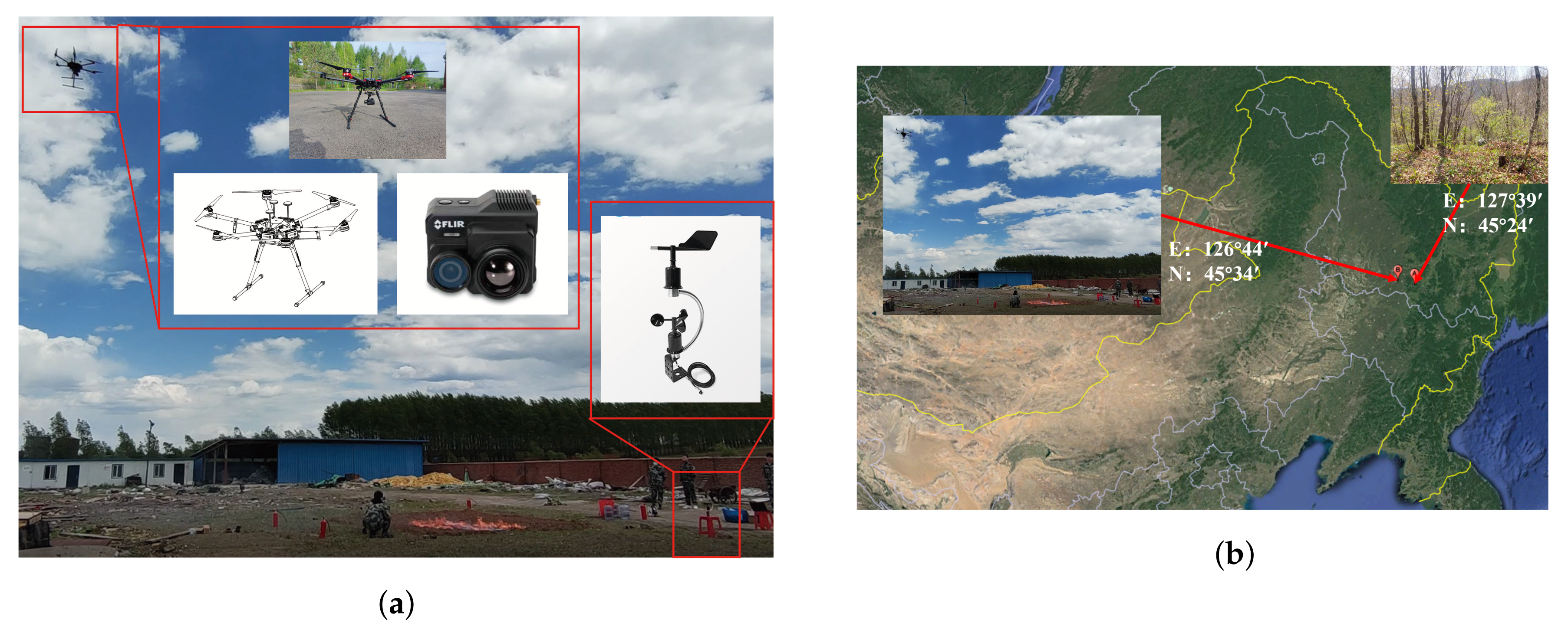
2.1. Burning Experiment Configuration
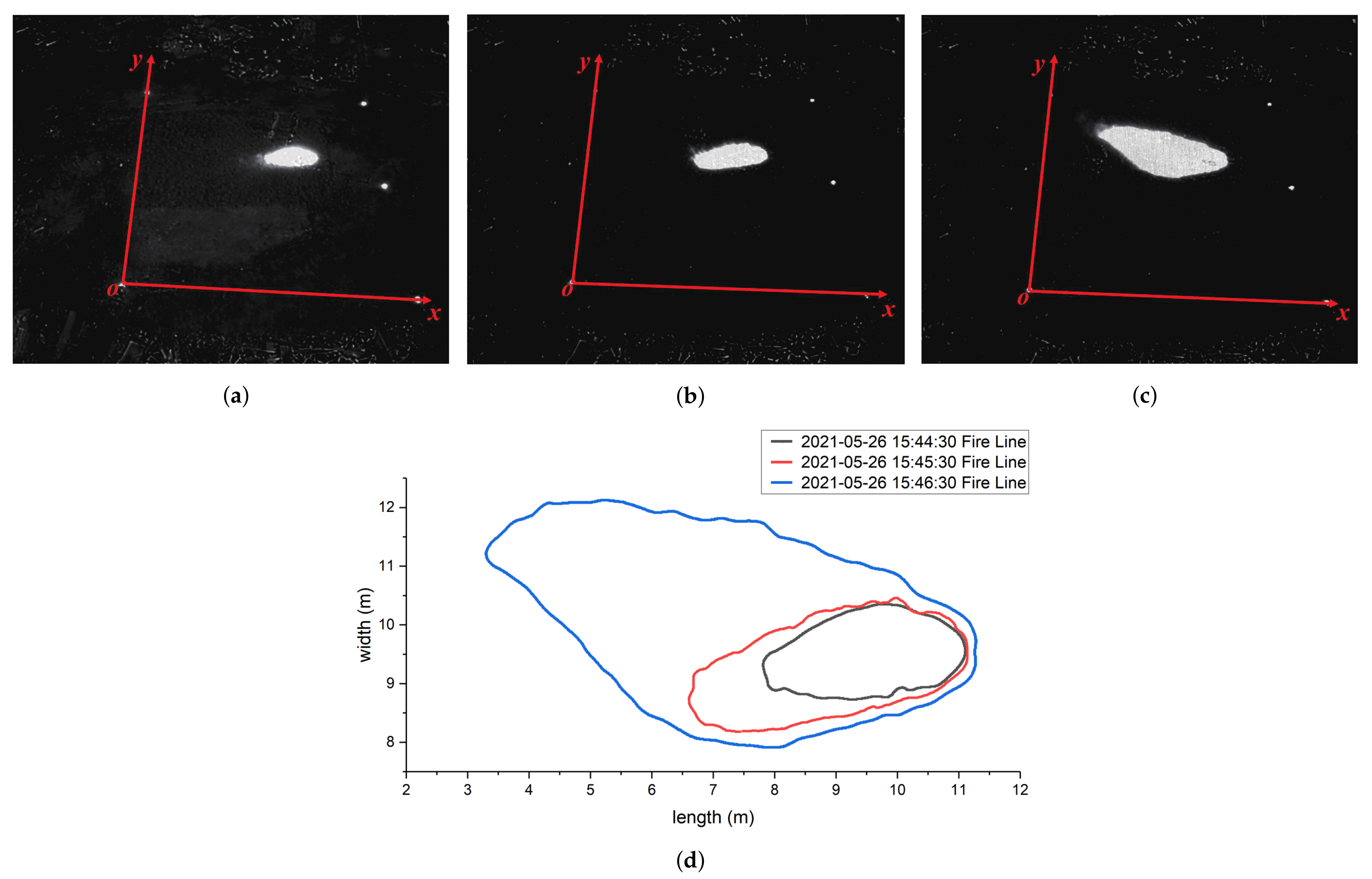
2.2. Computing Fire Spreading Rate from Sequences of the Infrared Images
3. LSTM-Based Model for Predicting Forest Fire Spread Rate
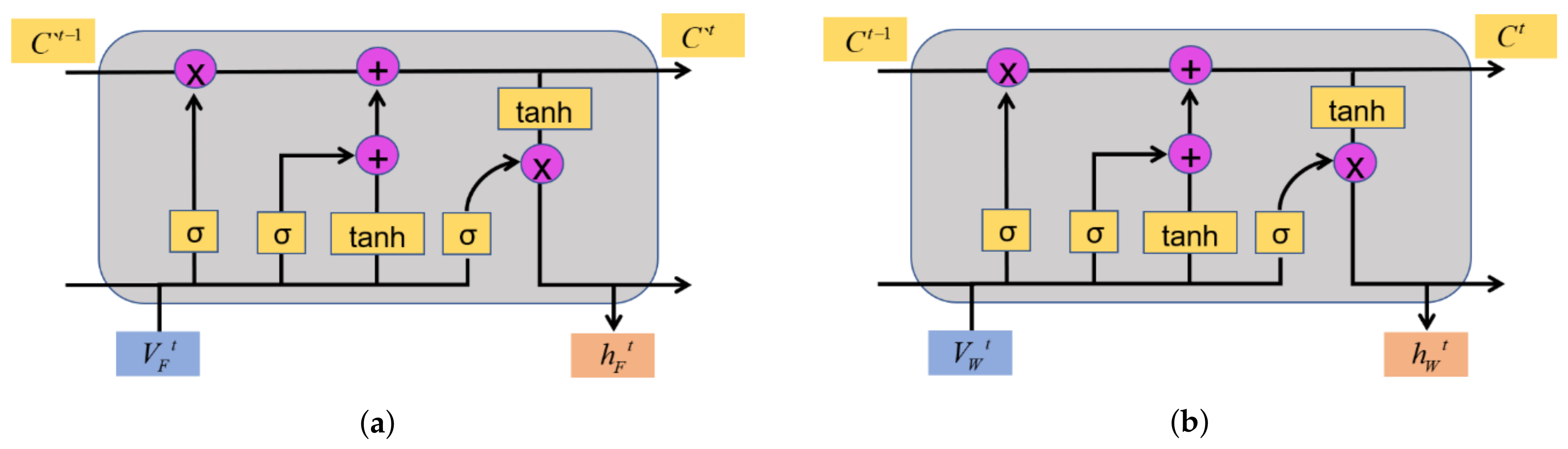
3.1. Normal LSTM-Based Model
3.2. Improved Progressive LSTM-Based Models
3.2.1. CSG-LSTM with Combined Gate of the Same Type
3.2.2. MDG-LSTM with Combined Gate of the Different Type
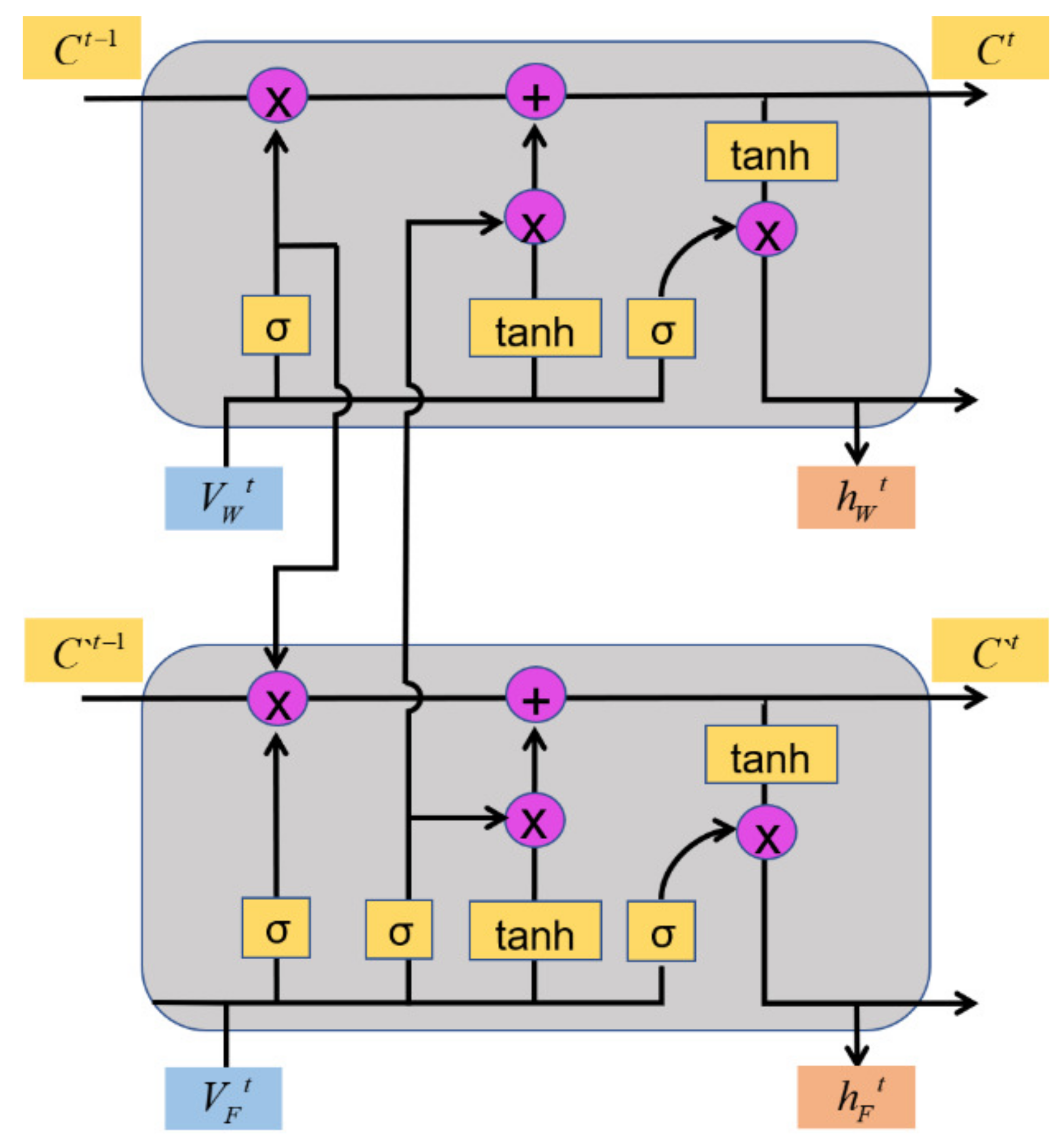
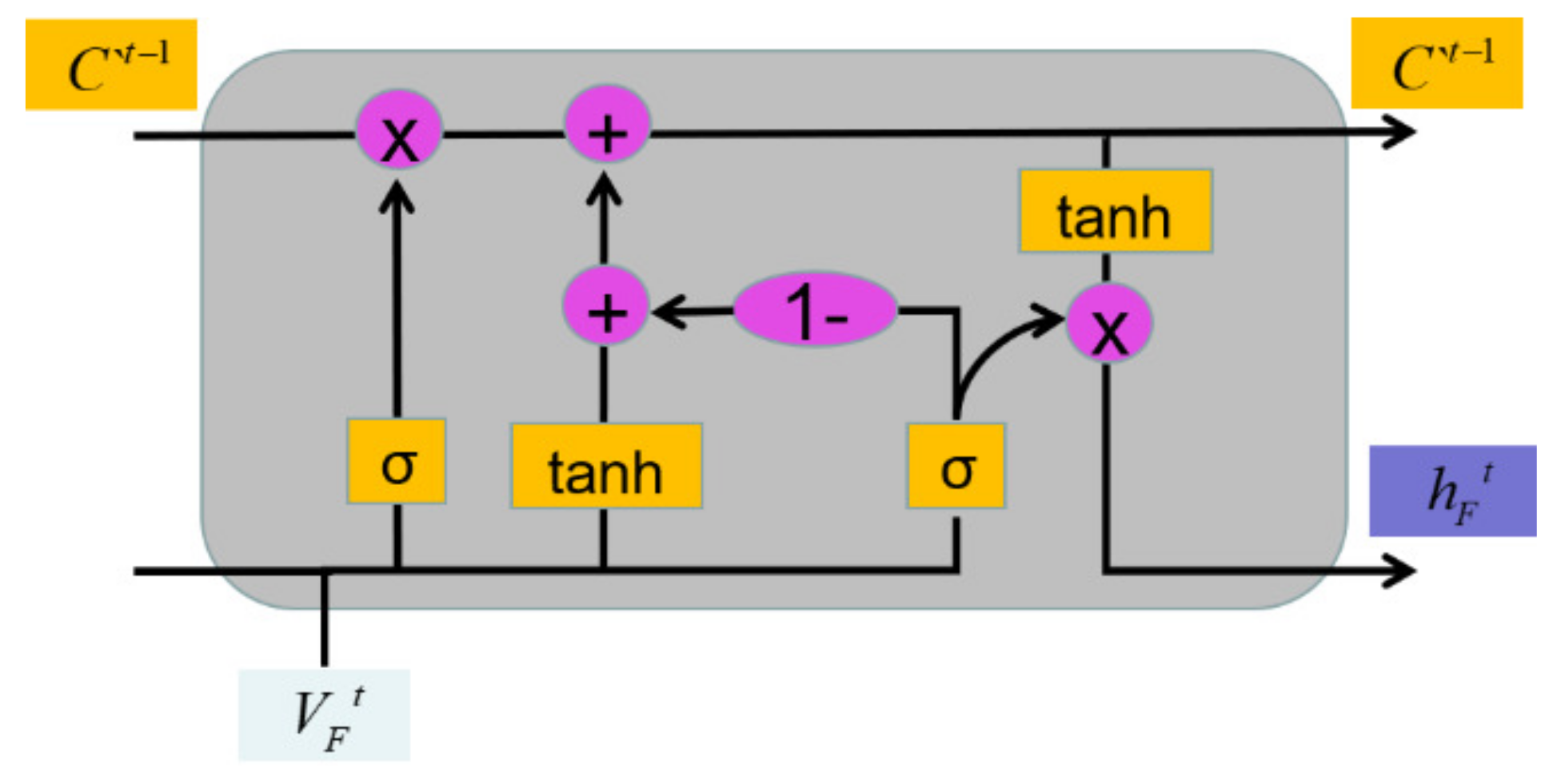
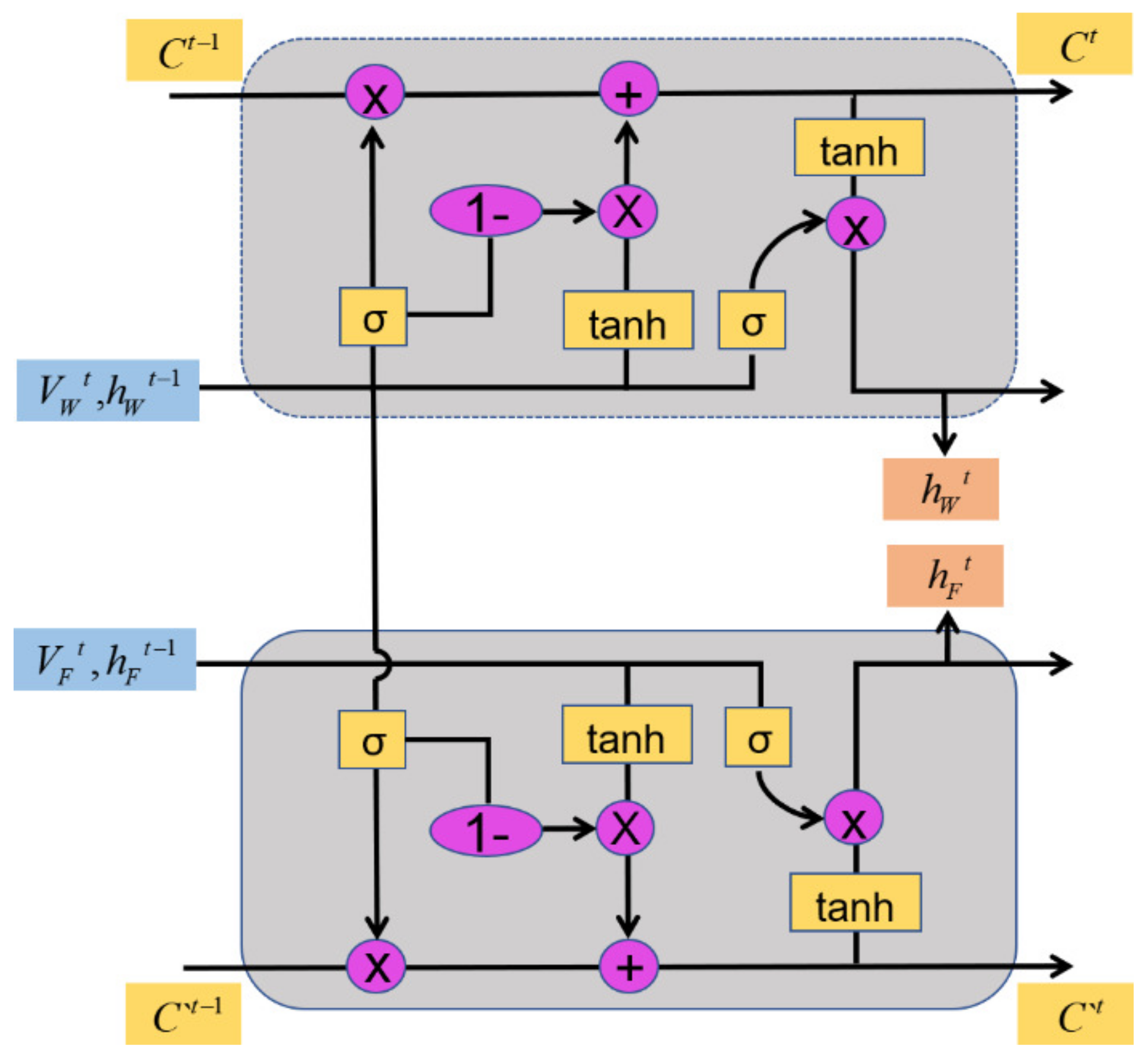
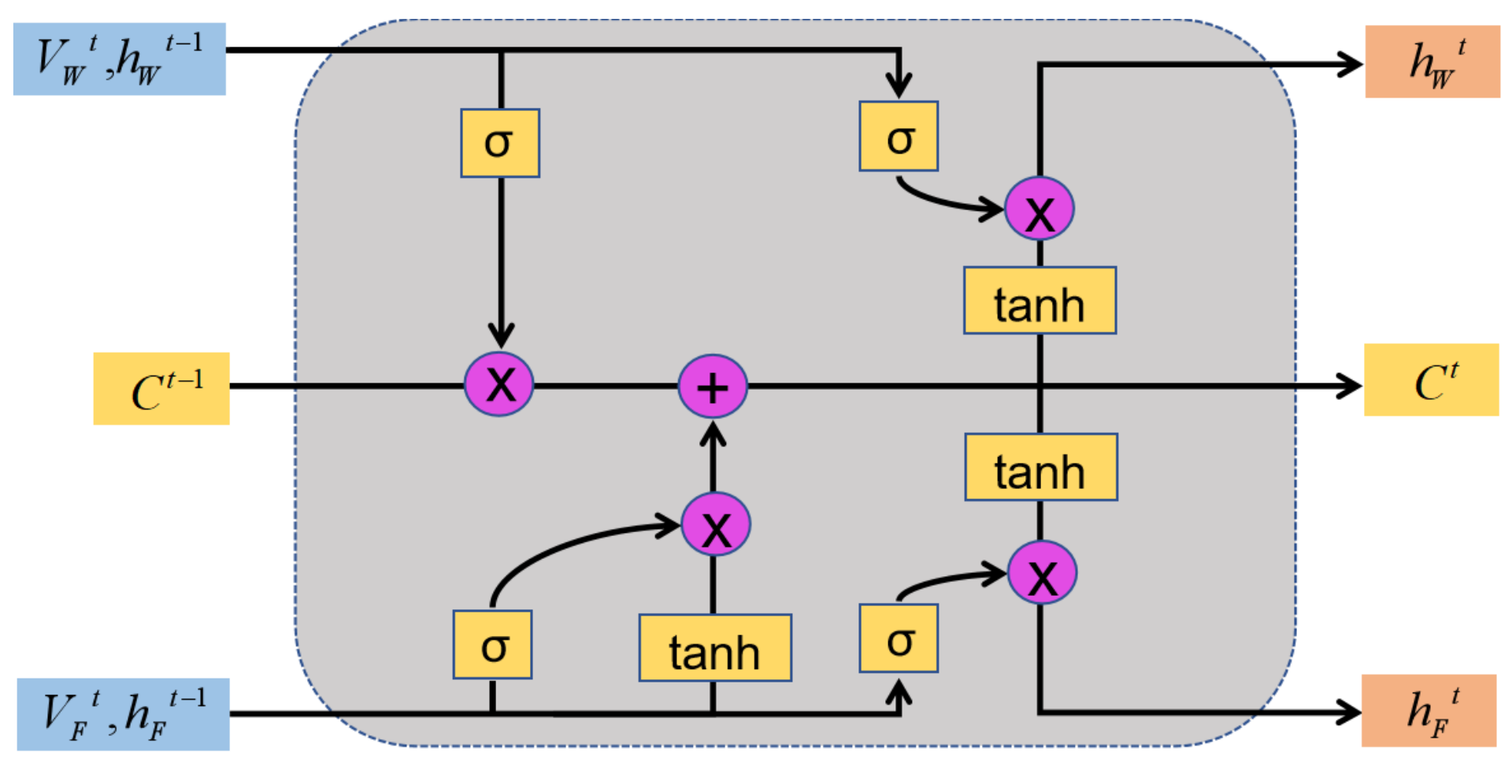
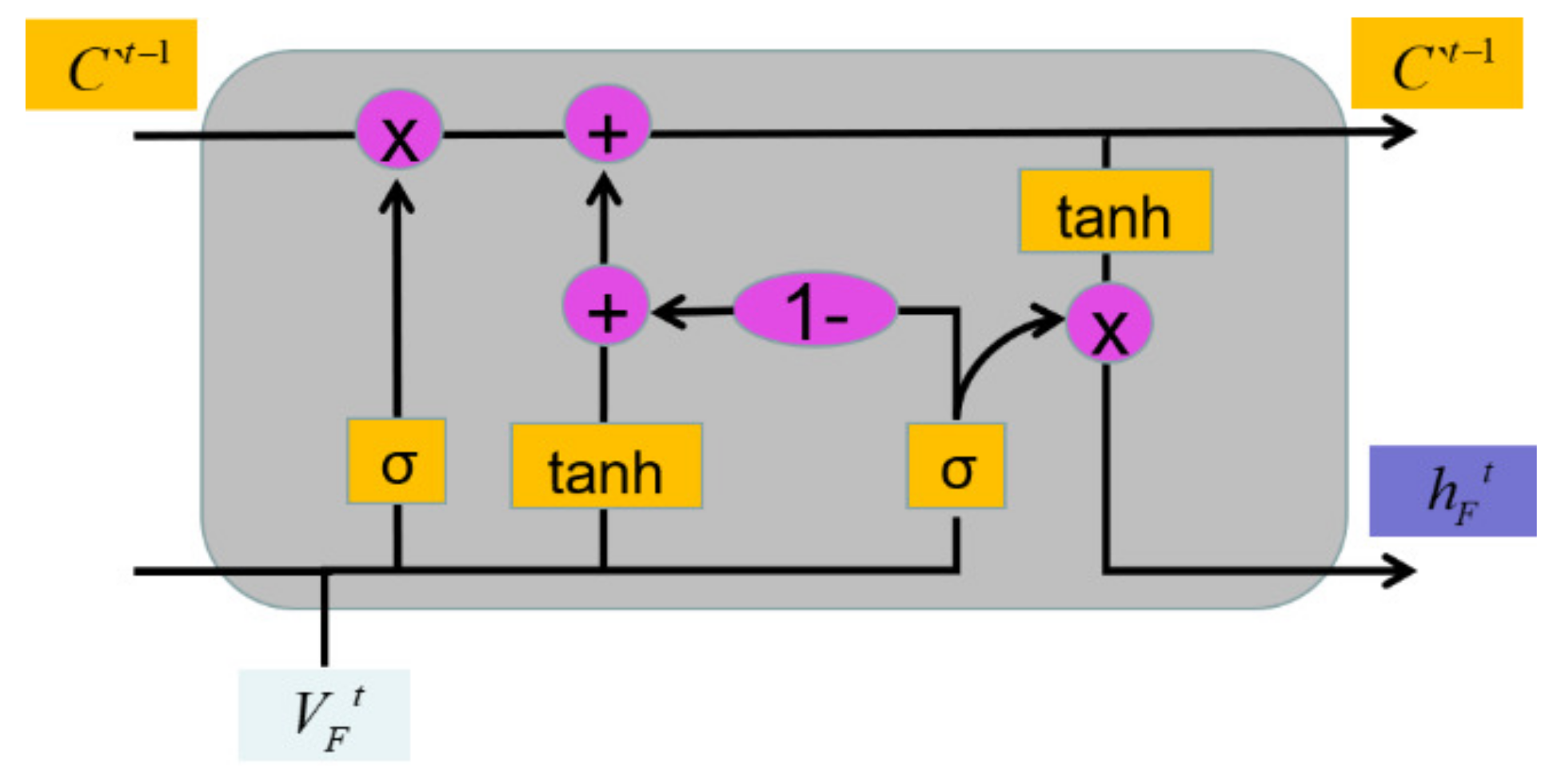
3.2.3. FNU-LSTM with Fusion of Two Neural Units
4. Result and Analysis
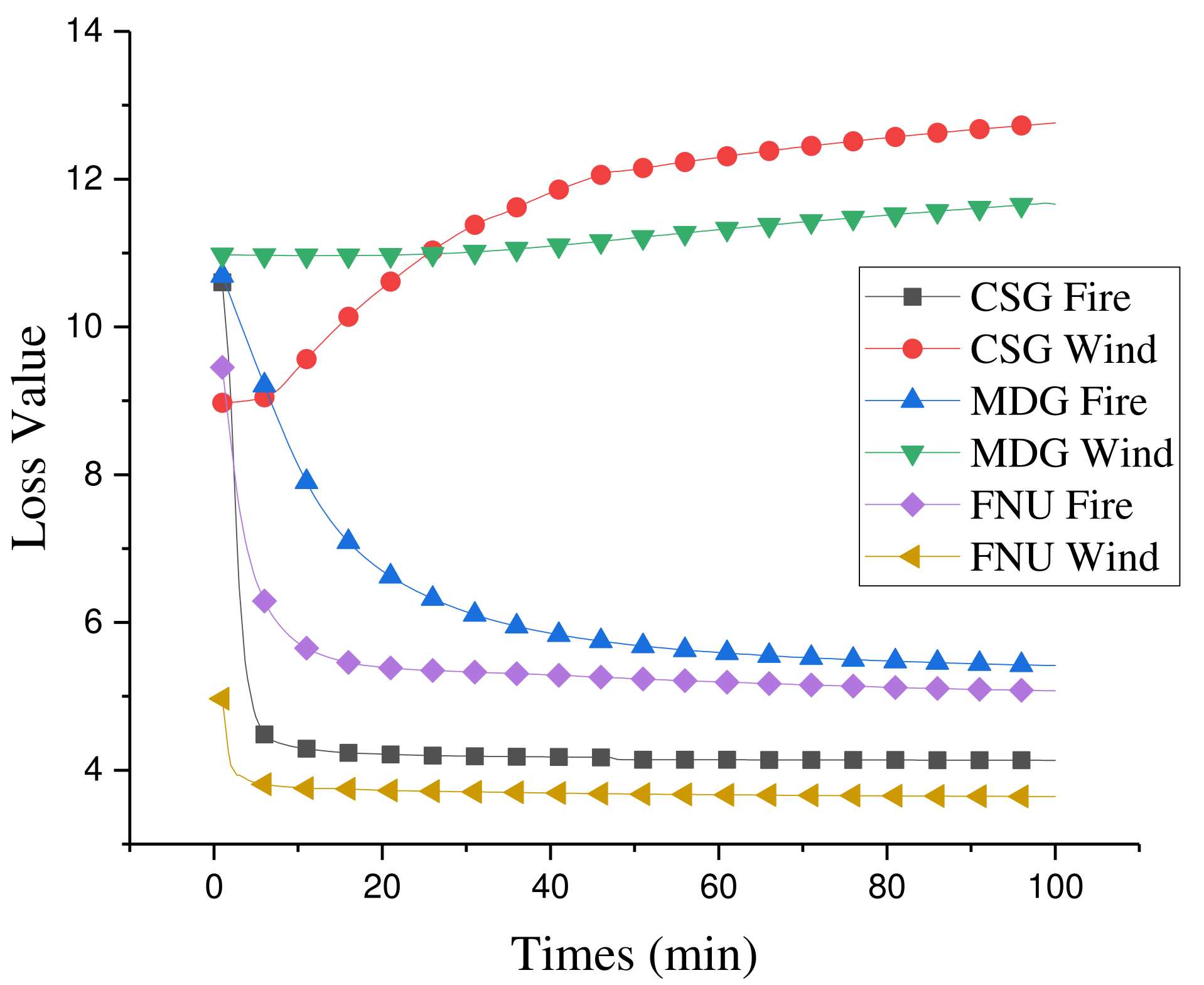
4.1. Analysis of Loss Value for Training the LSTM Based Models
4.2. Error Analysis of LSTM Based Models
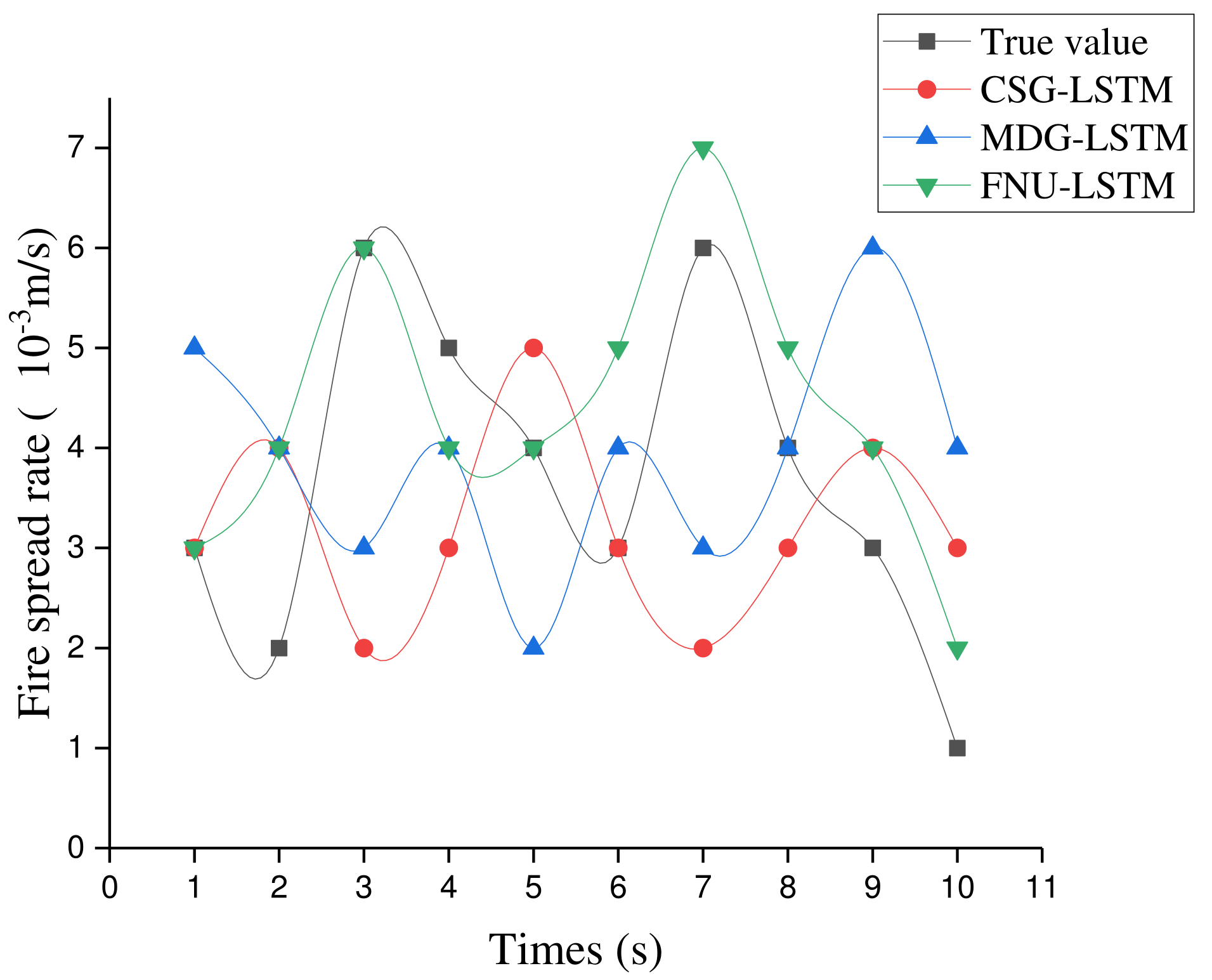
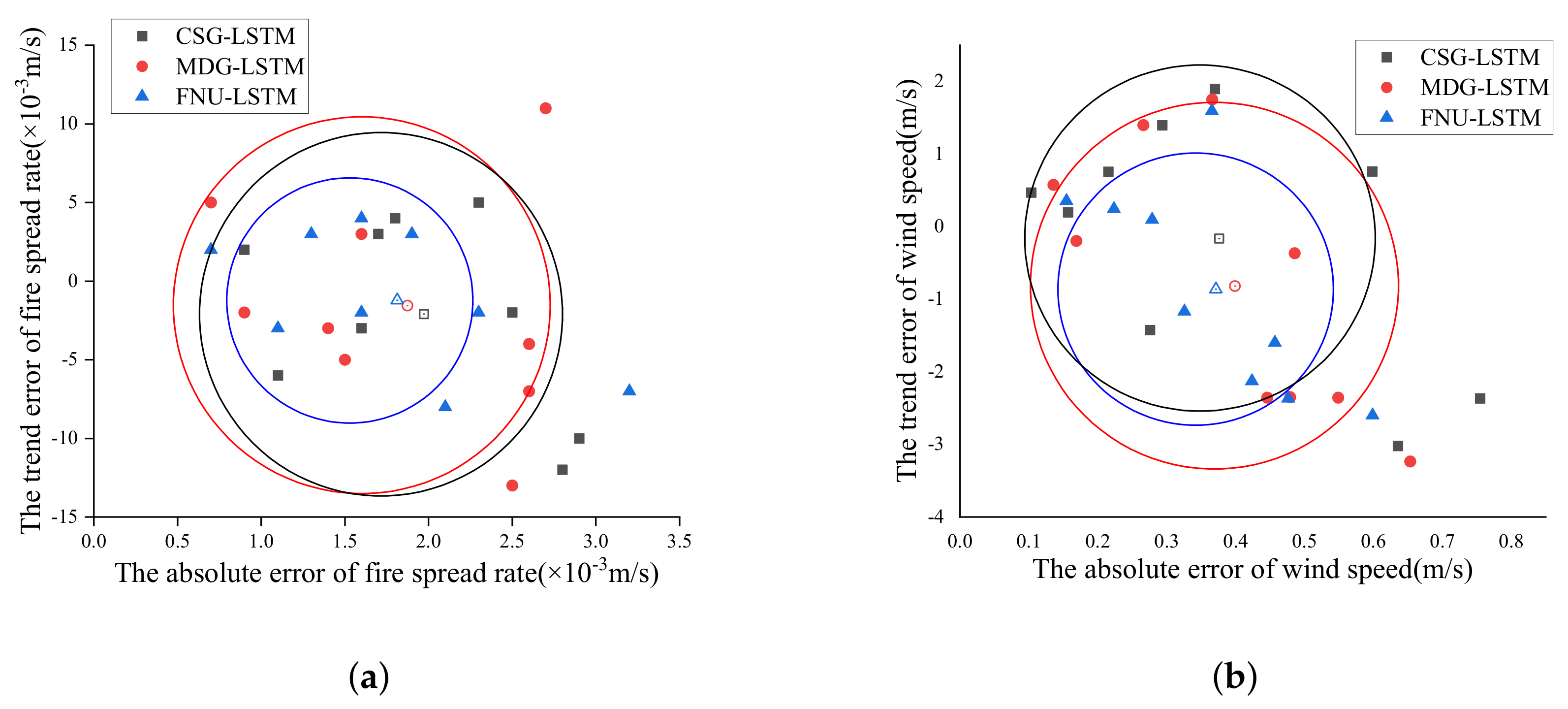
4.2.1. Predicting Error
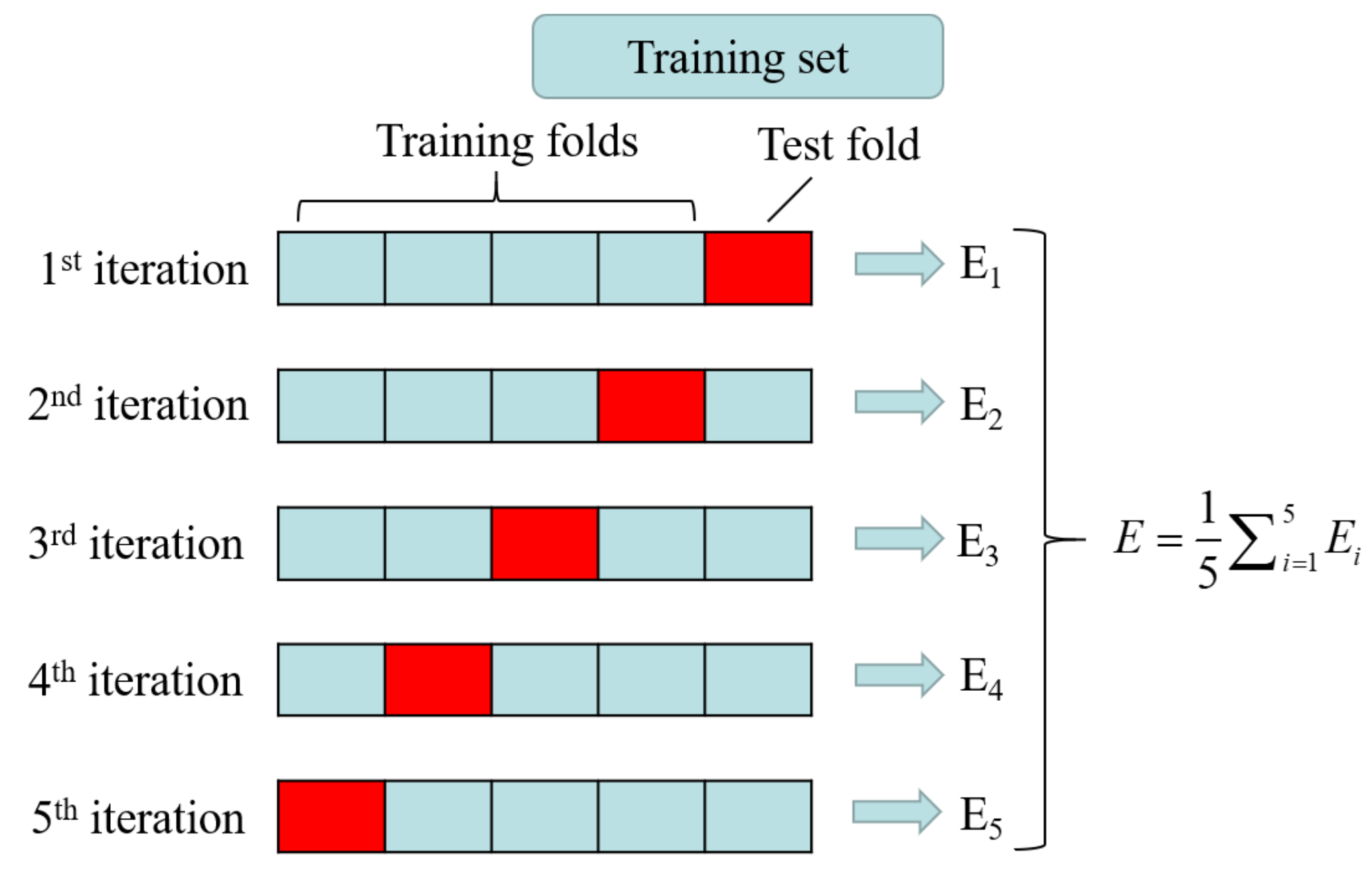
4.2.2. Generalization Ability of the Model
4.3. Optimizing Hyperparameters of Improved LSTM Based Model
4.4. Comparing Experiments
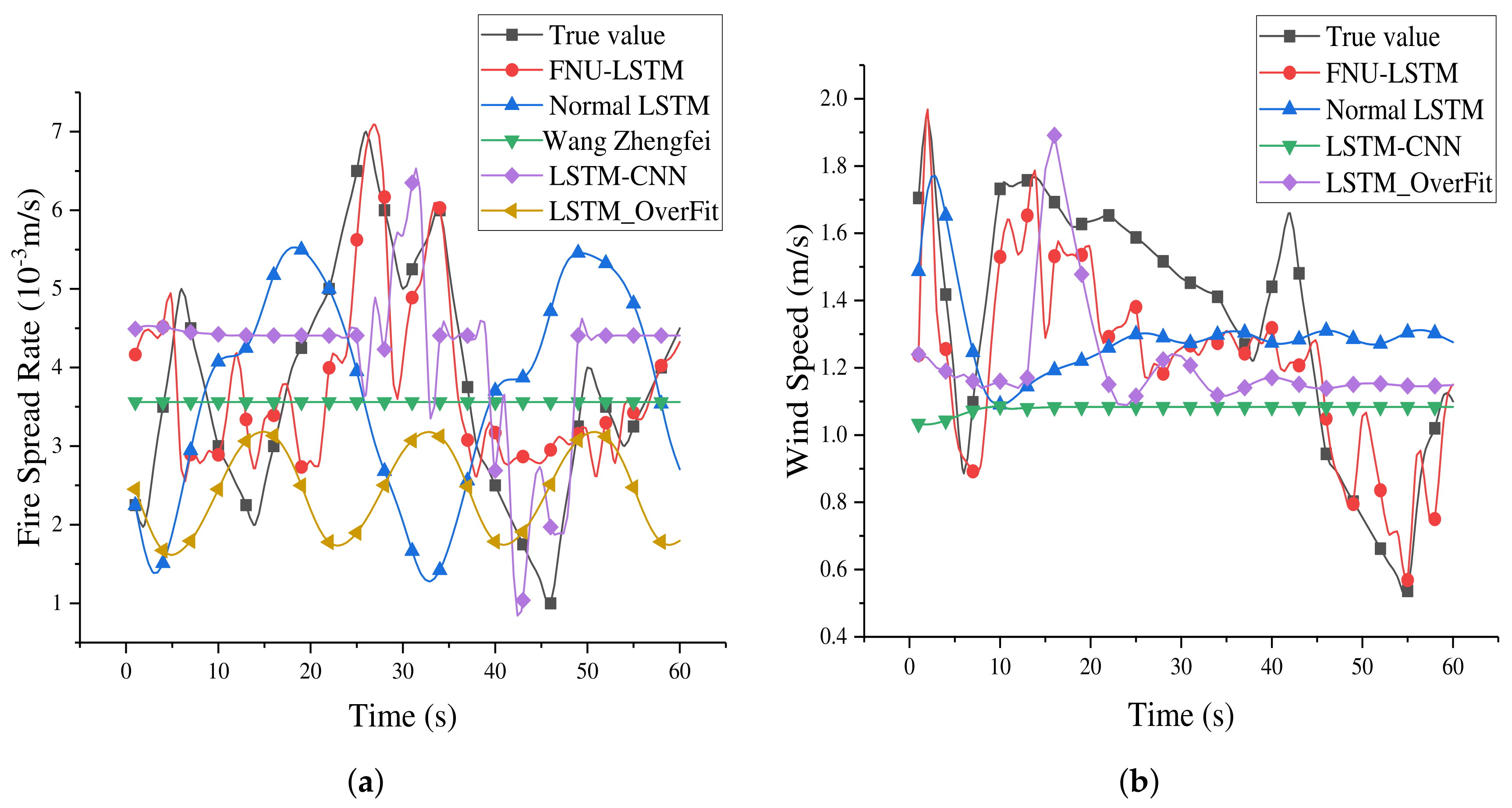
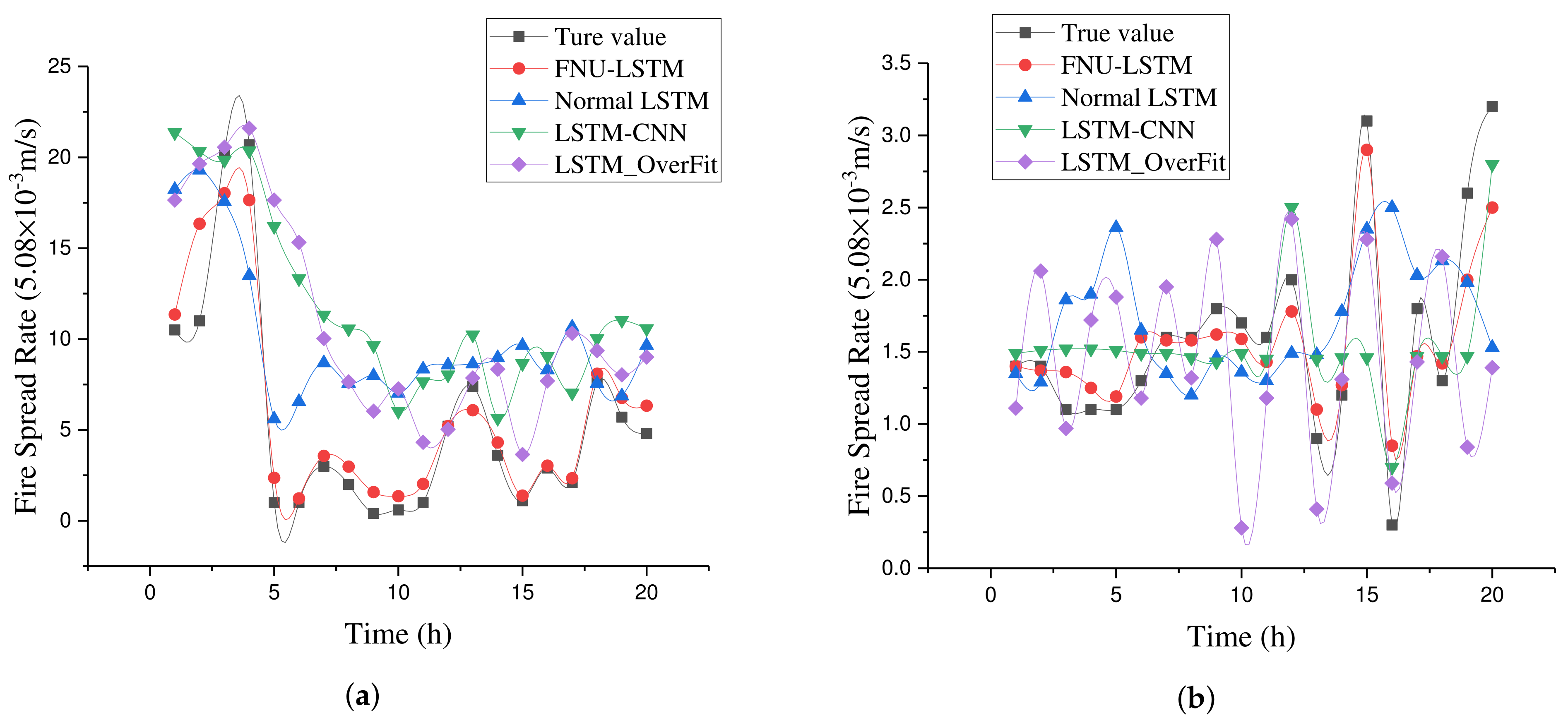
4.4.1. Comparison Based on the Data from Burning Fire Experiment
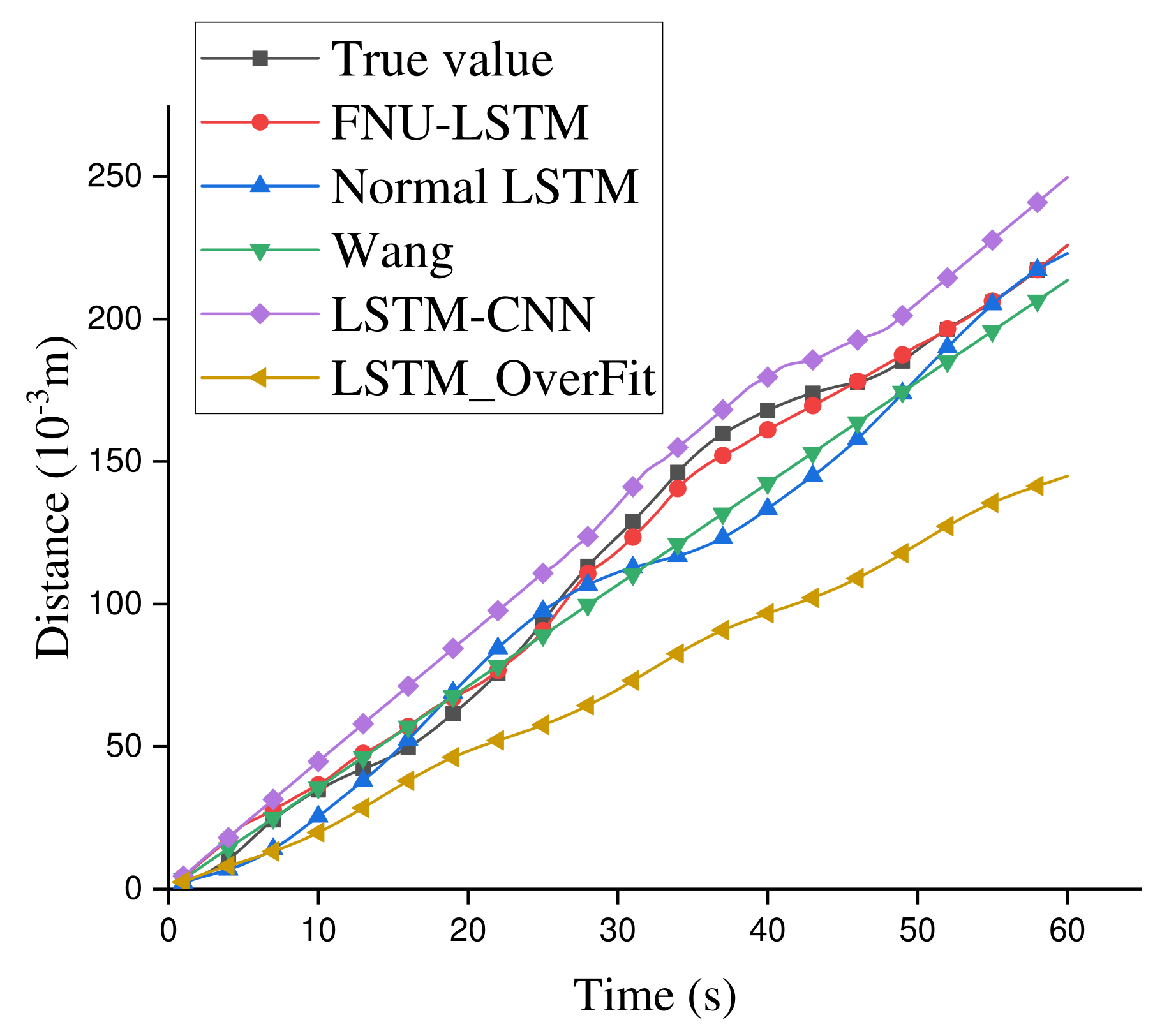
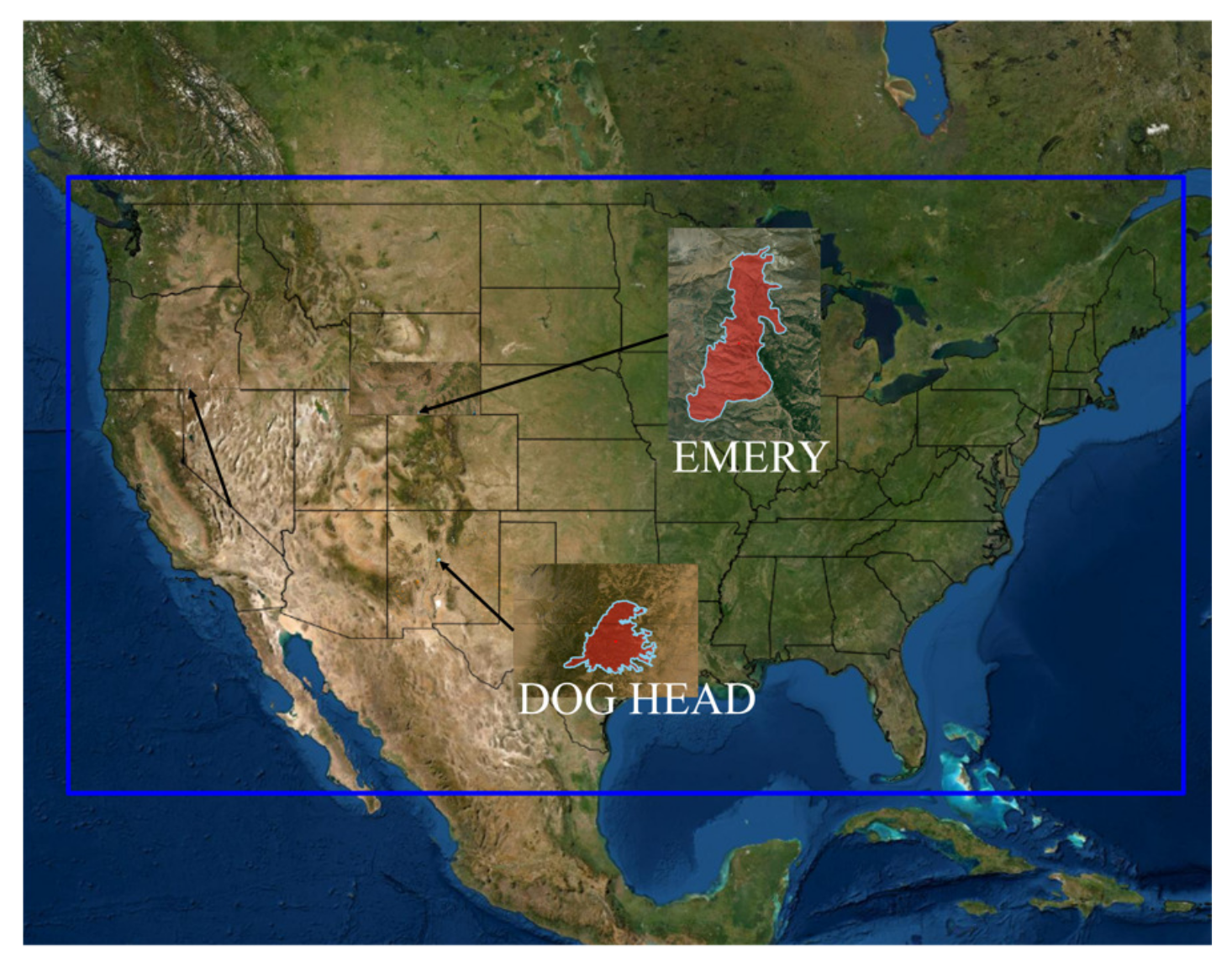
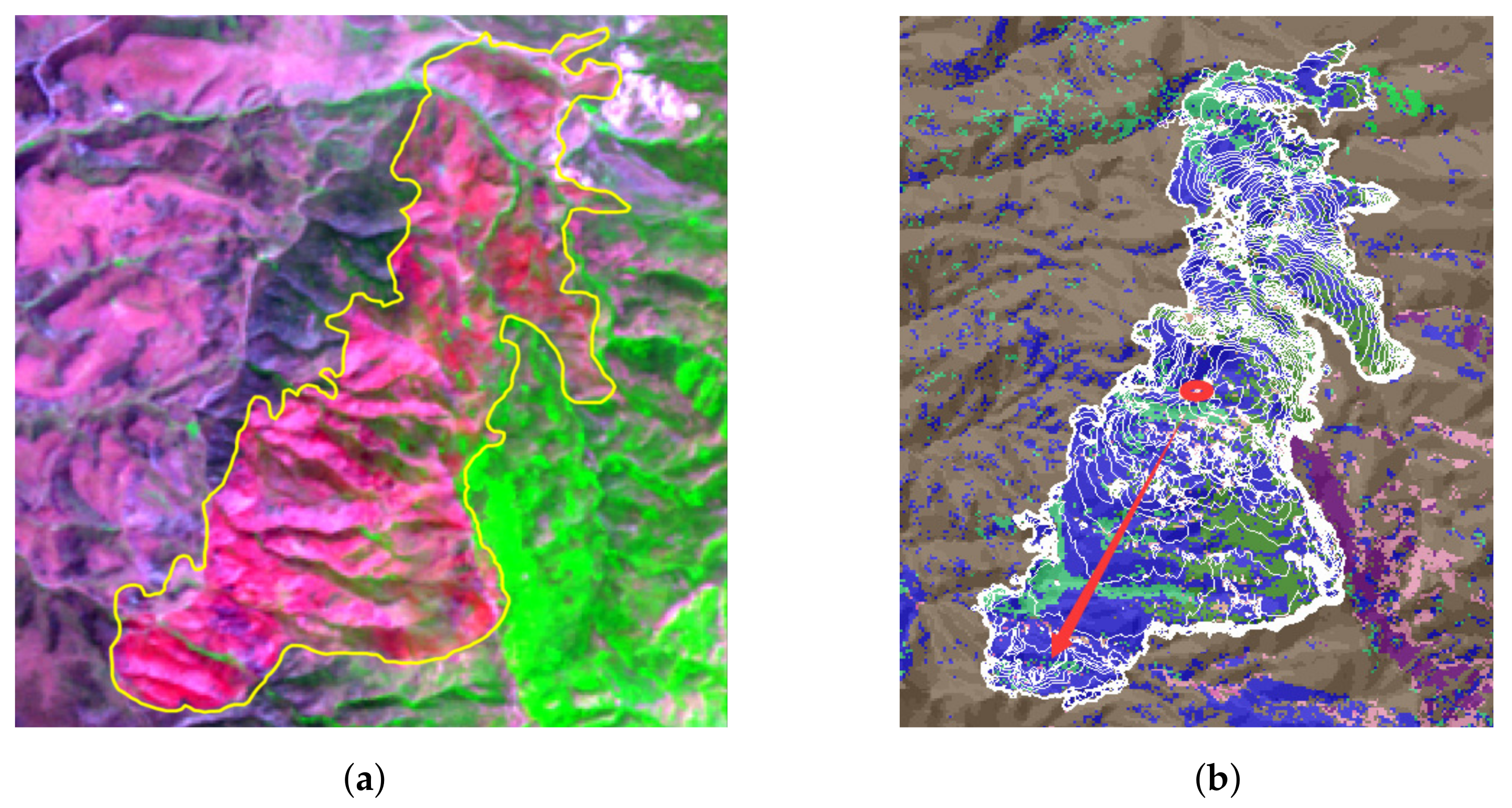
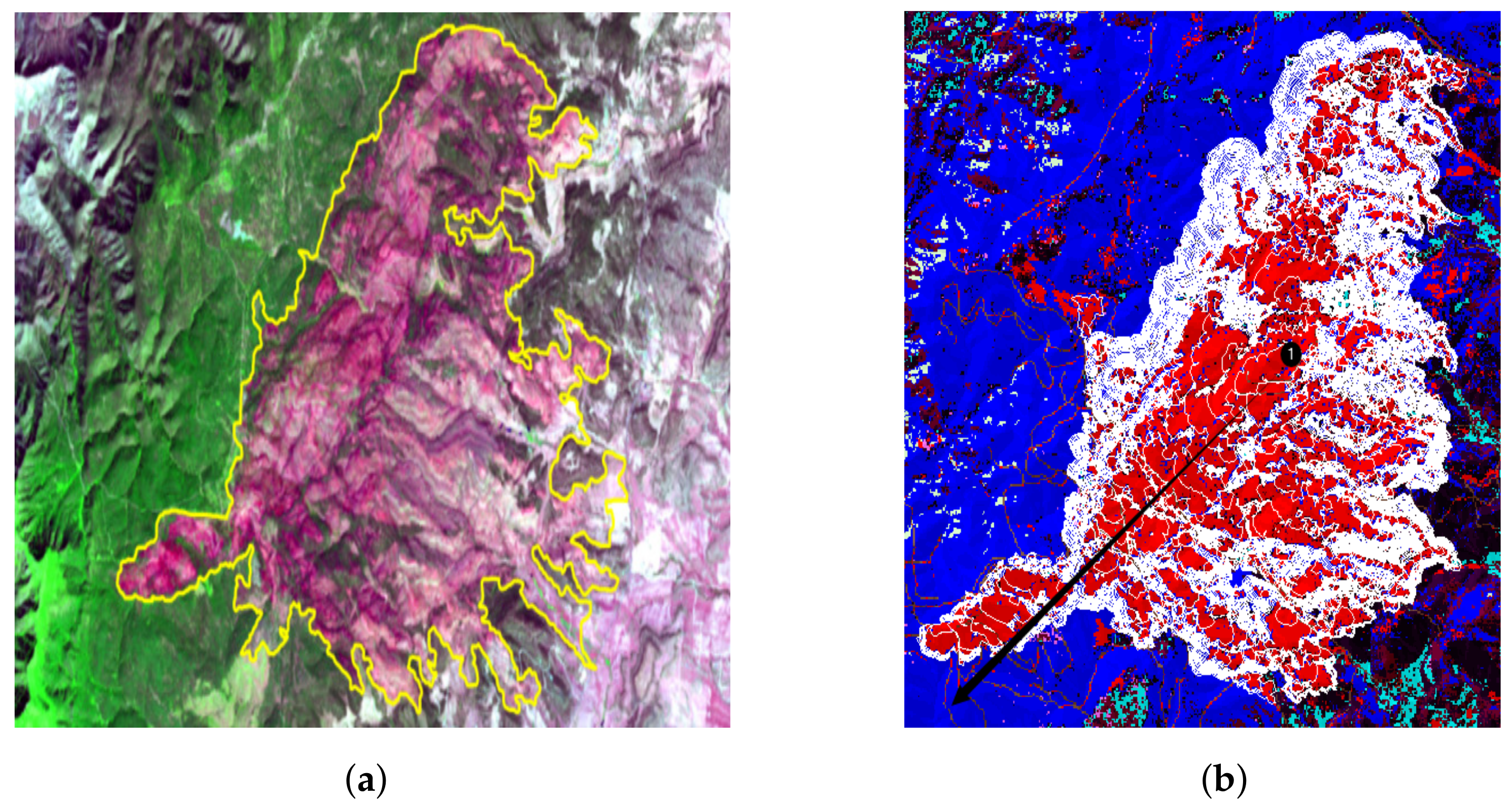
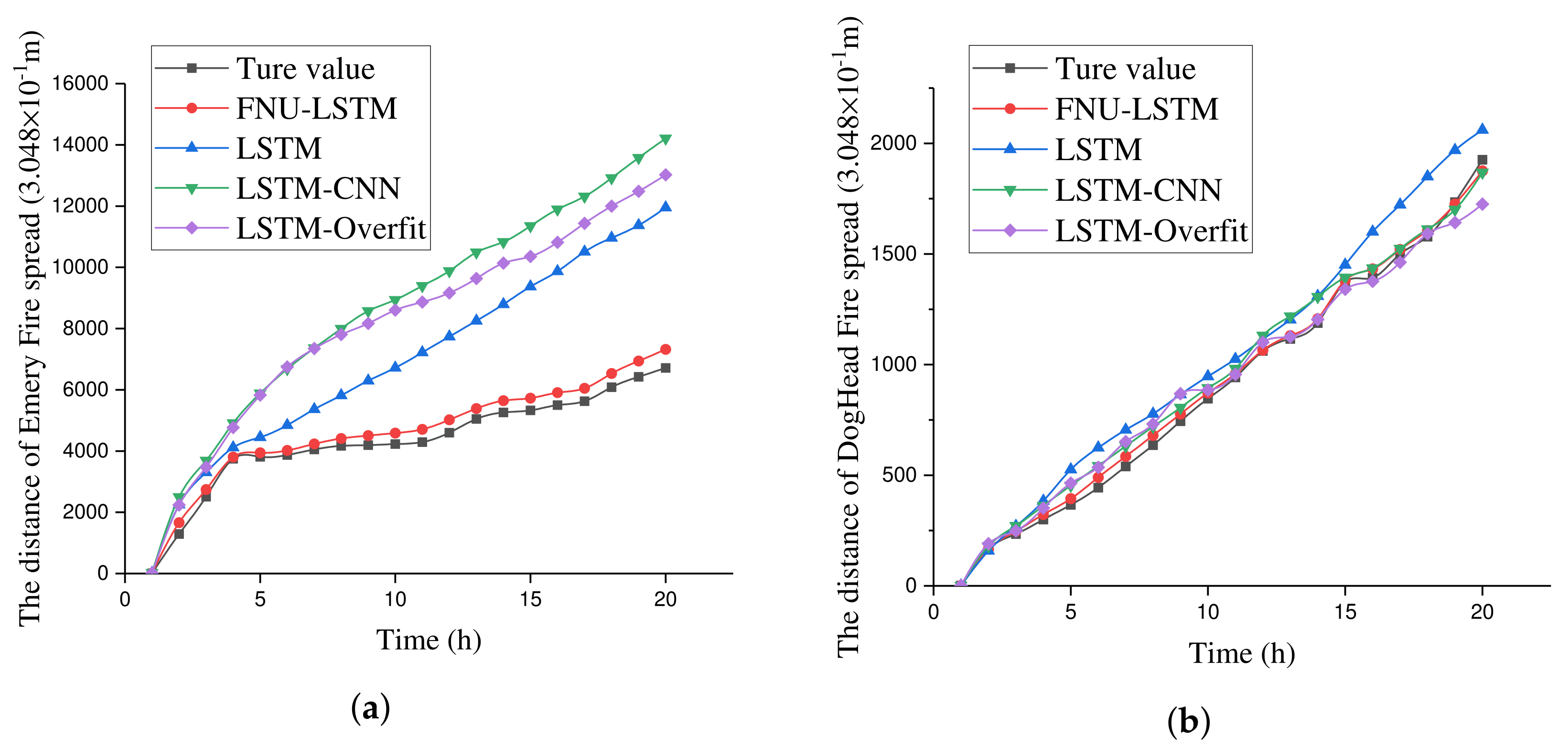
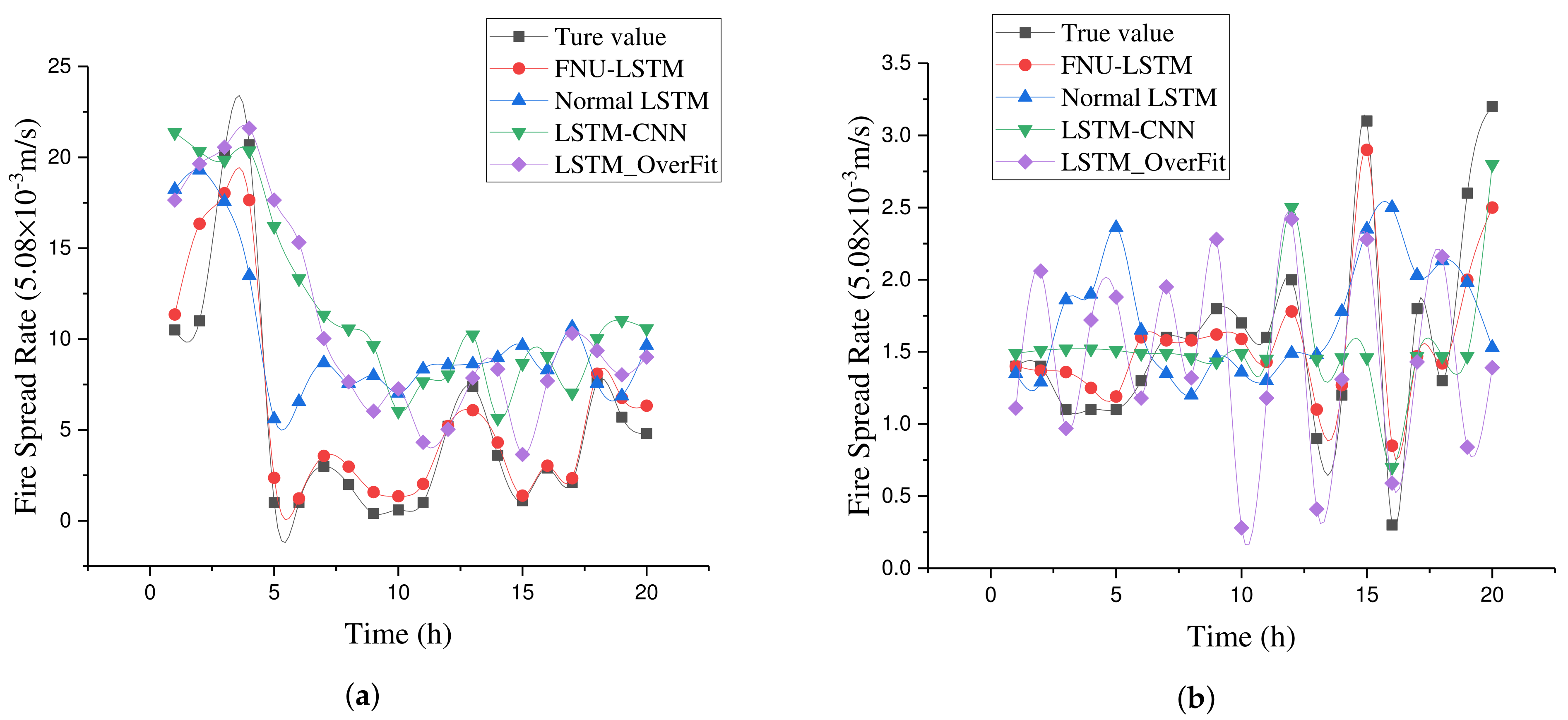
4.4.2. Comparison Based on the Data from Wildland Fire
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Di, X.Y.; Liu, C.; Sun, J.; Yang, G.; Yu, H.Z. Technical Study on Forest Fire Loss Assessment. For. Eng. 2015, 31, 42–45. [Google Scholar]
- Liu, K.; Wei, Y.X.; Xu, J.G.; Zhao, Y.Z.; Cai, Z.Y. Design of Forest Fire Identification Algorithm Based on Computer Vision. For. Eng. 2018, 34, 89–95. [Google Scholar]
- Zhang, J.W.; Zhang, H.L.; Li, M.B. TDLAS Based Early-stage Forest Fire Detection System. For. Eng. 2013, 29, 139–142. [Google Scholar]
- Page, W.G.; Wagenbrenner, N.S.; Butler, B.W.; Blunck, D.L. An analysis of spotting distances during the 2017 fire season in the Northern Rockies, USA. Can. J. For. Res. 2019, 49, 317–325. [Google Scholar] [CrossRef]
- Dowdy, A.J.; Ye, H.; Pepler, A.; Thatcher, M. Future changes in extreme weather and pyroconvection risk factors for Australian wildfires. Sci. Rep. 2019, 9, 10073. [Google Scholar] [CrossRef]
- Jack, C.; Kerry, A.; Radenko, P.; Michael, D.M.; Hugo, L. The FireWork v2.0 air quality forecast system with biomass burning emissions from the Canadian Forest Fire Emissions Prediction System v2.03. Geosci. Model Dev. 2019, 12, 3283–3310. [Google Scholar]
- Carlos, G.R.; Paulo, M.F. On the fire spread rate influence of some fuel bed parameters derived from rothermel’s model thermal energy balance. Sumar. List 2018, 142, 77–80. [Google Scholar]
- Rossa, C.G.; Fernandes, P.M. Empirical Modeling of Fire Spread Rate in No-Wind and No-Slope Conditions. For. Sci. 2018, 64, 358–370. [Google Scholar] [CrossRef]
- Sun, T.; Zhang, L.H.; Chen, W.L.; Tang, X.X.; Qin, Q.Q. Mountains Forest Fire Spread Simulator Based on Geo-Cellular Automaton Combined with Wang Zhengfei Velocity Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1971–1987. [Google Scholar] [CrossRef]
- Feng, Y.j.; Liu, Y.; Tong, X.H. Comparison of metaheuristic cellular automata models: A case study of dynamic land use simulation in the Yangtze River Delta. Comput. Environ. Urban Syst. 2018, 70, 138–150. [Google Scholar] [CrossRef]
- Hu, M.; Cai, W.; Zhao, H.O. Simulation of Passenger Evacuation Process in Cruise Ships Based on A Multi-Grid Model. Symmetry Basel 2019, 11, 1166. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Luo, B.; Kong, M.; Li, B.; Pei, Z. Fast Superpixel Segmentation via Boundary Sampling and Interpolation. IEEE Trans. Inf. Syst. 2019, 102, 871–874. [Google Scholar] [CrossRef]
- Zhang, J.M.; Shu, X.M.; Trevelyan, J.; Lin, W.C.; Chai, P.F. A solution approach for contact problems based on the dual interpolation boundary face method. Appl. Math. Model. 2019, 70, 643–658. [Google Scholar] [CrossRef]
- Kim, J.W.; Kim, S.K. Fitness switching genetic algorithm for solving combinatorial optimization problems with rare feasible solutions. J. Supercomput. 2016, 72, 3549–3571. [Google Scholar] [CrossRef]
- Lin, S.; Xia, L.W.; Ma, G.W.; Zhou, S.W.; Xie, Y.M. A maze-like path generation scheme for fused deposition modeling. Int. J. Adv. Manuf. Technol. 2019, 104, 1509–1519. [Google Scholar] [CrossRef]
- Zeng, Z.Q.; He, X.D.; Wang, Y.; Wu, X. Research on Mixed Big Data Analysis System of Forest Fire Based on Hadoop and Spark. World For. Res. 2017, 31, 55–59. [Google Scholar]
- Zhou, G.X.; Wu, Q.; Chen, A.B. Forestry Fire Spatial Diffusion Model Based on Multi-Agent Algorithm with Cellular Automata. J. Syst. Simul. 2018, 30, 824–830, 839. [Google Scholar]
- Santucci, J.F.; Capocchi, L.; Zeigler, B.P. System entity structure extension to integrate abstraction hierarchies and time granularity into DEVS modeling and simulation. Simul. Trans. Soc. Model. Simul. Int. 2016, 92, 747–769. [Google Scholar] [CrossRef]
- He, Q.; Wang, J.Z.; Lu, H.Y. A hybrid system for short-term wind speed forecasting. Appl. Energy 2018, 241, 756–771. [Google Scholar] [CrossRef]
- Chen, X.J.; Zhao, J.; Jia, X.Z.; Li, Z.L. Multi-step wind speed forecast based on sample clustering and an optimized hybrid system. Renew. Energy 2020, 165, 595–611. [Google Scholar] [CrossRef]
- Xiao, L.Y.; Shao, W.; Jin, F.L.; Wu, Z.C. A self-adaptive kernel extreme learning machine for short-term wind speed forecasting. Appl. Soft Comput. 2020, 99, 106917. [Google Scholar] [CrossRef]
- Elham, P.; Mehdi, F.; Javad, A.T. An Enhanced Deep Neural Network-Based Architecture for Joint Extraction of Entity Mentions and Relations. Int. J. Fuzzy Log. Intell. Syst. 2020, 20, 69–76. [Google Scholar]
- Hwang, C.; John, Y.H. Adaptive Recurrent Neural Network Enhanced Variable Structure Control for Nonlinear Discrete Mimo Systems. Asian J. Control 2018, 20, 2101–2115. [Google Scholar] [CrossRef]
- Lin, H.; Shi, C.Y.; Wang, B.; Chan, M.F.; Tang, X.L.; Ji, W. Towards real-time respiratory motion prediction based on long short-term memory neural networks. Phys. Med. Biol. 2019, 64, 085010. [Google Scholar] [CrossRef]
- Felix, A.G.; Jurgen, S.; Fred, C. Learning to forget: Continual prediction with LSTM. Neural Comput. 2000, 12, 2451–2471. [Google Scholar]
- Li, M.X.; Lu, F.; Zhang, H.C.; Chen, J. Predicting future locations of moving objects with deep fuzzy-LSTM networks. Transp. A Transp. Sci. 2020, 16, 119–136. [Google Scholar] [CrossRef]
- Lu, Y.; Li, H. Automatic Lip-Reading System Based on Deep Convolutional Neural Network and Attention-Based Long Short-Term Memory. Appl. Sci. Basel 2019, 9, 1599. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Li, F.; Zhang, L.; Liu, S. Human posture detection method based on long short term memory network. J. Comput. Appl. 2018, 38, 1568–1574. [Google Scholar]
- Yang, M.; Liu, J.; Chen, L.; Zhao, Z.; Chen, X.; Shen, Y. An Advanced Deep Generative Framework for Temporal Link Prediction in Dynamic Networks. IEEE Trans. Cybern. 2019, 50, 4946–4957. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Li, Z.N.; Zhang, G.H.; Liu, P.; Wang, J. Extracting and Predicting Taxi Hotspots in Spatiotemporal Dimensions Using Conditional Generative Adversarial Neural Networks. IEEE Trans. Veh. Technol. 2020, 69, 3680–3692. [Google Scholar] [CrossRef]
- Vinothkumar, T.; Deeba, K. Hybrid wind speed prediction model based on recurrent long short-term memory neural network and support vector ma-chine models. Soft Comput. 2020, 24, 5345–5355. [Google Scholar] [CrossRef]
- Pan, M.Y.; Zhou, H.N.; Cao, J.Y.; Liu, Y.S. Water Level Prediction Model Based on GRU and CNN. IEEE Access 2020, 8, 60090–60100. [Google Scholar] [CrossRef]
- Lai, Y.C.; David, A.D. Use of the Autoregressive Integrated Moving Average (ARIMA) Model to Forecast Near-Term Regional Temperature and Precipitation. Weather Forecast. 2020, 35, 959–976. [Google Scholar] [CrossRef]
- Chang, Y.; Chen, M.Y.; Yan, L.X.; Zhao, X.L.; Li, Y.; Zhong, S. Toward Universal Stripe Removal via Wavelet-Based Deep Convolutional Neural Net-work. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2880–2897. [Google Scholar] [CrossRef]
- Dou, X.M.; Yang, Y.G.; Luo, J.H. Estimating Forest Carbon Fluxes Using Machine Learning Techniques Based on Eddy Covariance Measurements. Sustainability 2018, 10, 203. [Google Scholar] [CrossRef] [Green Version]
- Xin, J.J.; Gan, L.; Jiao, L.N.; Lai, C.B. Accurate Density Calculation for Molten Slags in SiO2-Al2O3-CaO-MgO Systems. Isij Int. 2017, 57, 1340–1349. [Google Scholar] [CrossRef] [Green Version]
- Mahmud, M.S.; Meesad, P. An innovative recurrent error-based neuro-fuzzy system with momentum for stock price prediction. Soft Comput. 2016, 20, 4173–4191. [Google Scholar] [CrossRef]
- Wu, B.; Mu, C.; Zhao, J.; Zhou, X.; Zhang, J. Effects on Carbon Sources and Sinks from Conversion of Over-Mature Forest to Major Secondary Forests and Korean Pine Plantation in Northeast China. Sustainability 2019, 11, 4232. [Google Scholar] [CrossRef] [Green Version]
- Zeng, N.; Yao, H.; Zhou, M.; Zhao, P.; Dech, J.P.; Zhang, B.; Lu, X. Species-specific determinants of mortality and recruitment in the forest-steppe ecotone of northeast China. For. Chron. 2016, 92, 336–344. [Google Scholar] [CrossRef]
- Seetharaman, R.; Tharun, M.; Anandan, K. A Novel approach in Hybrid Median Filtering for Denoising Medical images. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1187, 012028. [Google Scholar] [CrossRef]
- Smieschek, M.; Kobsik, G.; Stollenwerk, A.; Kowalewski, S.; Orlikowsky, T.; Schoberer, M. Aided Hand Detection in Thermal Imaging Using RGB Stereo Vision. IEEE Eng. Med. Biol. Soc. 2019, 2019, 6314–6317. [Google Scholar]
- Yuan, J.; Zhu, D.; Sun, B.; Sun, L.; Wu, L.; Song, Y.; Jiang, R. Machine vision based segmentation algorithm for rice seedling. Acta Agric. Zhejiangensis 2016, 28, 1069–1075. [Google Scholar]
- Riehle, D.; Reiser, D.; Griepentrog, H.W. Robust index-based semantic plant/background segmentation for RGB-images. Comput. Electron. Agric. 2020, 169, 105201. [Google Scholar] [CrossRef]
- Guerrini, F.; Dalai, M.; Leonardi, R. Minimal Information Exchange for Secure Image Hash-Based Geometric Transformations Estimation. Ieee Trans. Inf. Forensics Secur. 2020, 15, 3482–3496. [Google Scholar] [CrossRef]
- Amestoy, M.E.; Ortiz, O.D. Global Positioning from a Single Image of a Rectangle in Conical Perspective. Sensors 2019, 19, 5432. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Butler, B.; Quarles, S.; Standohar-Alfano, C.; Morrison, M.; Jimenez, D.; Sopko, P.; Wold, C.; Bradshaw, L.; Atwood, L.; Landon, J.; et al. Exploring fire response to high wind speeds: Fire rate of spread, energy release and flame residence time from fires burned in pine needle beds under winds up to 27 ms−1. Int. J. Wildland Fire 2020, 29, 81–92. [Google Scholar] [CrossRef]
- Bai, X. Predicting the Number of Publications for Scholarly Networks. IEEE Access 2018, 6, 11842–11848. [Google Scholar] [CrossRef]
- Hu, H.C.; Li, Y.Y.; Zhu, H.D. Nonlocal symmetries, consistent tanh expansion solvability and interaction solutions for a new fifth-order nonlinear integrable equation. Waves Random Complex Media 2020, 30, 208–215. [Google Scholar] [CrossRef]
- Gad, M.; Dn, S.; Pm, T.; Ahm, S.; Lav, D. A new approach to river flow forecasting: LSTM and GRU multivariate models. IEEE Lat. Am. Trans. 2019, 17, 1978–1986. [Google Scholar]
- Bahri, A.; Majelan, S.G.; Mohammadi, S.; Noori, M.; Mohammadi, K. Remote Sensing Image Classification via Improved Cross-Entropy Loss and Transfer Learning Strategy Based on Deep Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1087–1091. [Google Scholar] [CrossRef]
- Li, T.; He, Z.; Wang, B.; Yan, Y.; Tang, X. Session-based Recommendation Algorithm Based on Recurrent Temporal Convolutional Network. Comput. Sci. 2020, 47, 103–109. [Google Scholar]
- Bergmeir, C.; Hyndman, R.J.; Koo, B. A note on the validity of cross-validation for evaluating autoregressive time series prediction. Comput. Stat. Data Anal. 2017, 120, 70–83. [Google Scholar] [CrossRef]
- Chen, Y.Y.; Lv, Y.S.; Wang, X.; Li, L.X.; Wang, F.Y. Detecting Traffic Information from Social Media Texts with Deep Learning Approaches. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3049–3058. [Google Scholar] [CrossRef]
- Wang, J.N.; Xu, W.J.; Fu, X.Y.; Xu, G.L.; Wu, Y.R. ASTRAL: Adversarial Trained LSTM-CNN for Named Entity Recognition. Knowl.-Based Syst. 2020, 197, 105842. [Google Scholar] [CrossRef]
- Wang, Q.L.; Guo, Y.F.; Yu, L.X.; Li, P. Earthquake Prediction Based on Spatio-Temporal Data Mining: An LSTM Network Approach. IEEE Trans. Emerg. Top. Comput. 2020, 8, 148–158. [Google Scholar] [CrossRef]
- Ma, Y.; Shen, M.; X Du, M.; Ren, Y.; Bian, G. An iterative observer-based fault estimation for discrete-time T-S fuzzy systems. Int. J. Syst. Sci. 2020, 51, 1–12. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Overview | Specifications |
|---|---|---|
| 1 | Type | FLIR Duo Pro R640 |
| 2 | Thermal imager | Uncooled VOxMicrbolometer |
| 3 | Spectral Band | 7.5–13.5 m |
| 4 | Thermal Sensitivity | <50 mK |
| 5 | Thermal Sensor Resolution Options | |
| 6 | Thermal Lens Options | |
| 7 | Thermal Frame Rate | 30 Hz |
| Experiment Number | Quality | Bed Size | Bed Thickness | Inclination | Water Content |
|---|---|---|---|---|---|
| (kg) | (m) | ||||
| 1 | 128.83 | 0.06 | 8 | 5.46 | |
| 2 | 135.83 | 0.06 | 18 | 5.46 | |
| 3 | 143.04 | 0.08 | 8 | 8.79 | |
| 4 | 185.25 | 0.04 | 18 | 1.85 | |
| 5 | 202.67 | 0.08 | 8 | 13 | |
| 6 | 106.17 | 0.04 | 0 | 10.52 | |
| 7 | 185.54 | 0.06 | 0 | 8.52 | |
| 8 | 151.42 | 0.06 | 8 | 5.39 | |
| 9 | 200.88 | 0.06 | 8 | 9.39 | |
| 10 | 132.21 | 0.04 | 18 | 6.81 | |
| 11 | 127.46 | 0.06 | 0 | 3.81 | |
| 12 | 143.17 | 0.06 | 0 | 3.24 | |
| 13 | 216.79 | 0.08 | 18 | 4.24 |
| No. | Aver Fire | Aver Wind | Stan Devi Fire | Stan Devi Wind | Confi Inter Fire | Confi Inter Wind |
|---|---|---|---|---|---|---|
| 1 | 6.931 | 1.219 | 4.376 | 0.471 | 1.151 | 0.157 |
| 2 | 2.852 | 1.505 | 1.552 | 0.489 | 0.251 | 0.079 |
| 3 | 3.286 | 0.805 | 2.235 | 0.434 | 0.507 | 0.098 |
| 4 | 4.373 | 1.365 | 2.129 | 0.397 | 0.489 | 0.091 |
| 5 | 5.389 | 1.808 | 1.994 | 0.488 | 0.452 | 0.111 |
| 6 | 5.405 | 1.148 | 2.329 | 0.339 | 0.522 | 0.076 |
| 7 | 4.431 | 1.170 | 2.217 | 0.353 | 0.385 | 0.061 |
| 8 | 11.479 | 1.495 | 2.910 | 0.502 | 0.845 | 0.146 |
| 9 | 6.820 | 1.217 | 2.265 | 0.357 | 0.644 | 0.101 |
| 10 | 6.847 | 1.371 | 2.353 | 0.313 | 0.583 | 0.078 |
| 11 | 4.013 | 1.148 | 1.680 | 0.340 | 0.263 | 0.076 |
| 12 | 3.964 | 1.555 | 2.407 | 0.508 | 0.525 | 0.088 |
| 13 | 8.491 | 1.496 | 6.194 | 0.502 | 4.643 | 0.146 |
| The Absolute Fire Error of Three Models | The Absolute Wind Error of Three Models | ||||
|---|---|---|---|---|---|
| CSG-LSTM | MDG-LSTM | FNU-LSTM | CSG-LSTM | MDG-LSTM | FNU-LSTM |
| 1.6 | 0.7 | 0.7 | 0.6 | 0.4 | 0.4 |
| 0.9 | 1.6 | 1.3 | 0.1 | 0.7 | 0.6 |
| 2.3 | 1.5 | 1.1 | 0.6 | 0.4 | 0.2 |
| 1.1 | 0.9 | 1.6 | 0.4 | 0.2 | 0.3 |
| 2.9 | 2.6 | 1.9 | 0.2 | 0.1 | 0.5 |
| 1.7 | 2.5 | 1.8 | 0.3 | 0.5 | 0.4 |
| 2.8 | 1.4 | 2.1 | 0.3 | 0.3 | 0.3 |
| 2.5 | 2.8 | 2.6 | 0.8 | 0.5 | 0.2 |
| 1.8 | 2.6 | 2.5 | 0.2 | 0.5 | 0.5 |
| The Trend Fire Error of Three Models | The Trend Wind Error of Three Models | ||||
|---|---|---|---|---|---|
| CSG-LSTM | MDG-LSTM | FNU-LSTM | CSG-LSTM | MDG-LSTM | FNU-LSTM |
| −3 | 5 | 2 | 0.8 | −2.4 | −2.1 |
| 2 | 3 | 3 | 0.5 | −3.2 | −2.6 |
| 5 | −5 | −3 | −3 | 1.7 | 0.2 |
| −6 | −2 | −2 | 1.9 | −0.2 | 0.1 |
| −10 | −7 | 3 | 0.2 | 0.6 | −1.6 |
| 3 | −13 | 4 | 1.4 | −2.4 | 1.8 |
| −12 | −3 | −8 | −1.4 | 1.4 | −1.2 |
| −2 | 11 | −7 | −2.4 | −0.4 | 0.4 |
| 4 | −4 | −2 | 0.8 | −2.3 | −2.6 |
| The Fire Loss Value of Three Models | The Wind Loss Value of Three Models | ||||
|---|---|---|---|---|---|
| CSG-LSTM | MDG-LSTM | FNU-LSTM | CSG-LSTM | MDG-LSTM | FNU-LSTM |
| 1.7 | 2.1 | 3.3 | 11.2 | 10 | 2 |
| 2 | 2.1 | 3.5 | 12.9 | 10 | 2 |
| 2.1 | 2.1 | 3.4 | 12.7 | 9.8 | 2 |
| 2.1 | 1.8 | 3.8 | 12.8 | 9.4 | 1.7 |
| 2.1 | 2.2 | 3.3 | 12.9 | 9.9 | 2.1 |
| 2.2 | 2.3 | 2.9 | 12.6 | 10.7 | 2 |
| 2.2 | 2.5 | 3.3 | 12.3 | 9.7 | 2.2 |
| 2.1 | 2.5 | 3.5 | 12.8 | 9.7 | 2 |
| 2.3 | 2.2 | 3.9 | 12.1 | 9.6 | 2.1 |
| Run Unit | Learning Rate | 1 | 2 | 3 | 4 | 5 | Mean Value | |
|---|---|---|---|---|---|---|---|---|
| Random normal | 15 | 0.0006 | 4.8625 | 5.555 | 5.0441 | 7.5702 | 4.3435 | 5.4742 |
| 10 | 0.0006 | 4.2895 | 6.3934 | 4.2624 | 6.7301 | 5.6124 | 5.4551 | |
| 15 | 0.001 | 4.4084 | 4.4953 | 4.5462 | 6.4876 | 4.1532 | 4.8179 | |
| Truncated normal | 15 | 0.0006 | 4.2536 | 5.5503 | 5.4241 | 6.9182 | 6.0189 | 5.63294 |
| 10 | 0.0006 | 2.9795 | 2.7683 | 5.159 | 6.5651 | 4.8001 | 4.4544 | |
| 15 | 0.001 | 5.1121 | 2.5852 | 5.4322 | 5.7672 | 6.0016 | 4.97966 |
| LSTM-CNN | LSTM-OverFit | LSTM | FNU-LSTM | |
|---|---|---|---|---|
| LSTM_Layers | 2 | 2 | 2 | 2 |
| Learning rate | 0.006 | 0.006 | 0.006 | 0.006 |
| Units | 10 | 10 | 10 | 10 |
| Batch_size | 30 | 30 | 30 | 10 |
| Time_step | 10 | 15 | 10 | 5 |
| Iterations | 1200 | 1200 | 1200 | 1200 |
| FNU-LSTM | LSTM | LSTM-CNN | LSTM_OverFit | Wang Zhengfei | |
|---|---|---|---|---|---|
| Fire spread rate ( m/s) | 1.065 | 2.258 | 1.299 | 2.073 | 1.458 |
| wind speed (m/s) | 0.259 | 0.391 | 0.449 | 0.362 |
| FNU-LSTM | LSTM | LSTM-CNN | LSTM-Overfit | |
|---|---|---|---|---|
| Emery Fire ( m/s) | 2.512 | 6.061 | 7.597 | 6.972 |
| Doghead Fire ( m/s) | 0.297 | 0.851 | 0.555 | 0.814 |
| FNU-LSTM | LSTM | LSTM-CNN | LSTM-Overfit | |
|---|---|---|---|---|
| Emery Fire ( m) | 354.03 | 3116.03 | 4867.4 | 4239.56 |
| DogHead ( m) | 28.01 | 144.5 | 64.64 | 75.37 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Gao, H.; Zhang, M.; Zhang, S.; Gao, Z.; Liu, J.; Sun, S.; Hu, T.; Sun, L. Prediction of Forest Fire Spread Rate Using UAV Images and an LSTM Model Considering the Interaction between Fire and Wind. Remote Sens. 2021, 13, 4325. https://doi.org/10.3390/rs13214325
Li X, Gao H, Zhang M, Zhang S, Gao Z, Liu J, Sun S, Hu T, Sun L. Prediction of Forest Fire Spread Rate Using UAV Images and an LSTM Model Considering the Interaction between Fire and Wind. Remote Sensing. 2021; 13(21):4325. https://doi.org/10.3390/rs13214325
Chicago/Turabian StyleLi, Xingdong, Hewei Gao, Mingxian Zhang, Shiyu Zhang, Zhiming Gao, Jiuqing Liu, Shufa Sun, Tongxin Hu, and Long Sun. 2021. "Prediction of Forest Fire Spread Rate Using UAV Images and an LSTM Model Considering the Interaction between Fire and Wind" Remote Sensing 13, no. 21: 4325. https://doi.org/10.3390/rs13214325
APA StyleLi, X., Gao, H., Zhang, M., Zhang, S., Gao, Z., Liu, J., Sun, S., Hu, T., & Sun, L. (2021). Prediction of Forest Fire Spread Rate Using UAV Images and an LSTM Model Considering the Interaction between Fire and Wind. Remote Sensing, 13(21), 4325. https://doi.org/10.3390/rs13214325