
An Efficient and Robust Framework for Hyperspectral Anomaly Detection



Abstract
:
1. Introduction
2. Materials and Motivation
2.1. The Datasets
2.2. Motivation
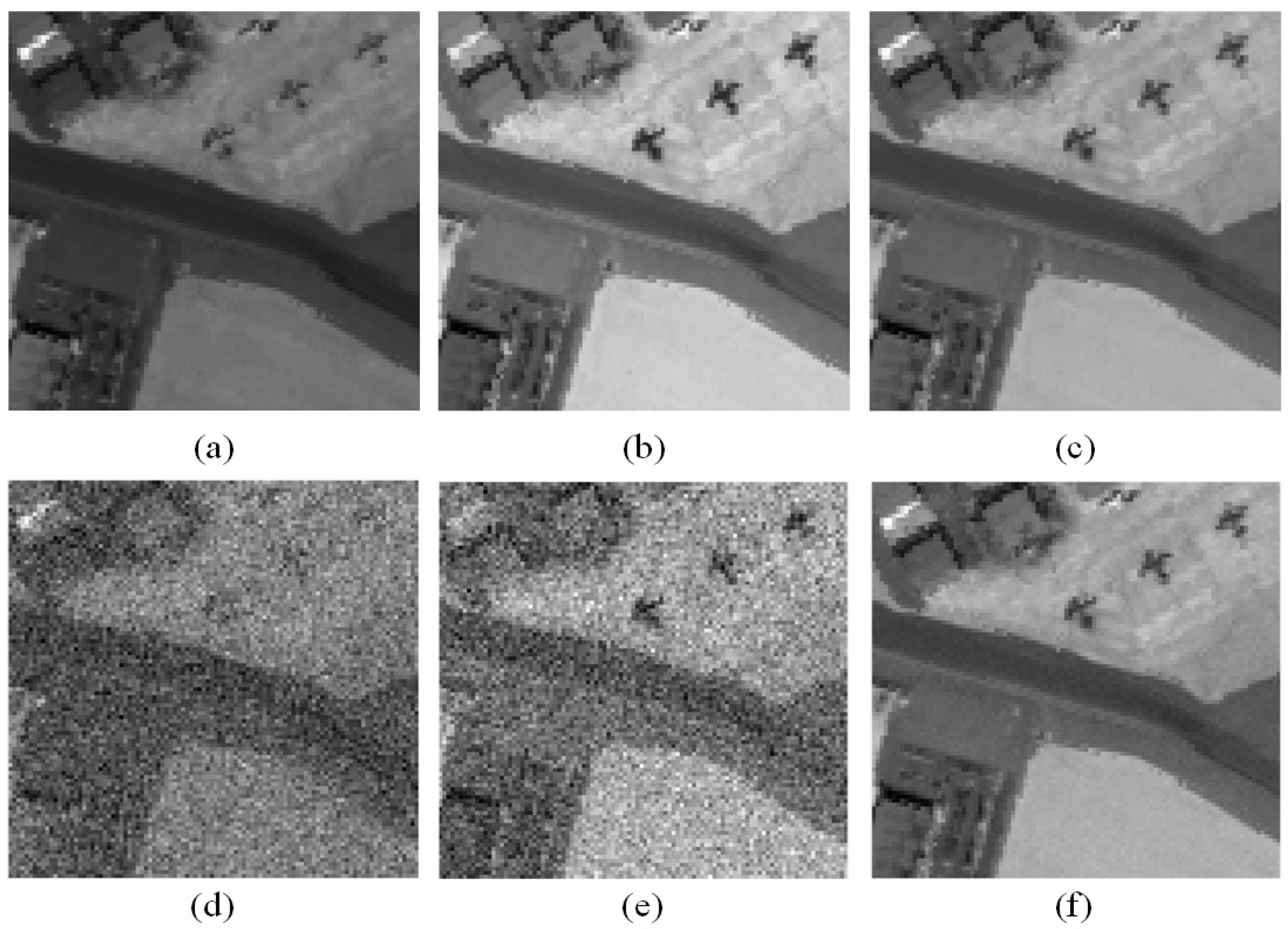
2.2.1. Redundant Spectral Channels
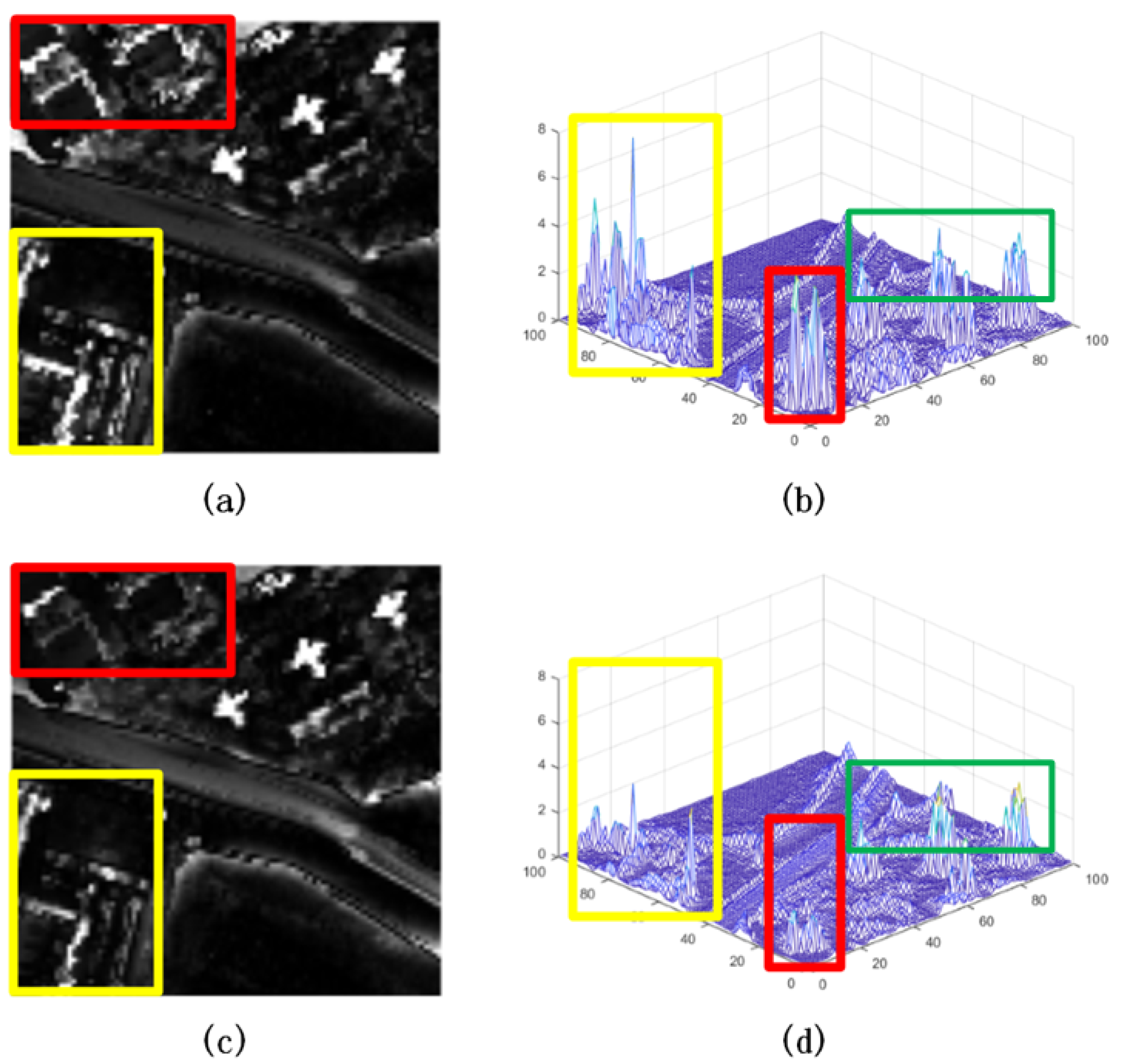
2.2.2. Complicated Backgrounds
3. Method
3.1. PCA Model
3.2. Weighted Guided Filter
3.3. Diagonal Matrix Operation
3.4. Evaluation indexes and Parameter Setting
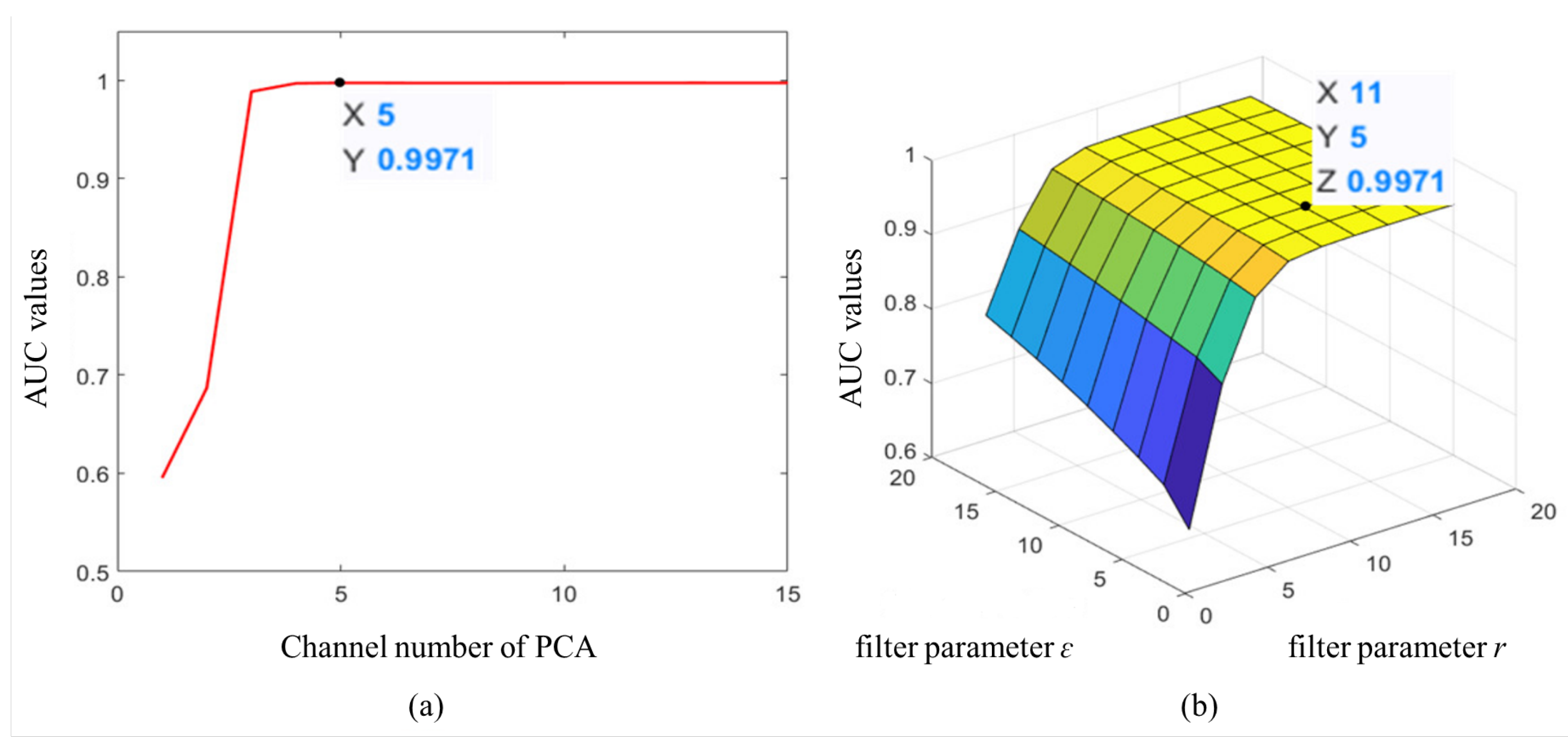
3.4.1. The Number of Dimensionality-Reduction Maps
3.4.2. Filter Parameters r and ε
4. Experimental Results and Discussion
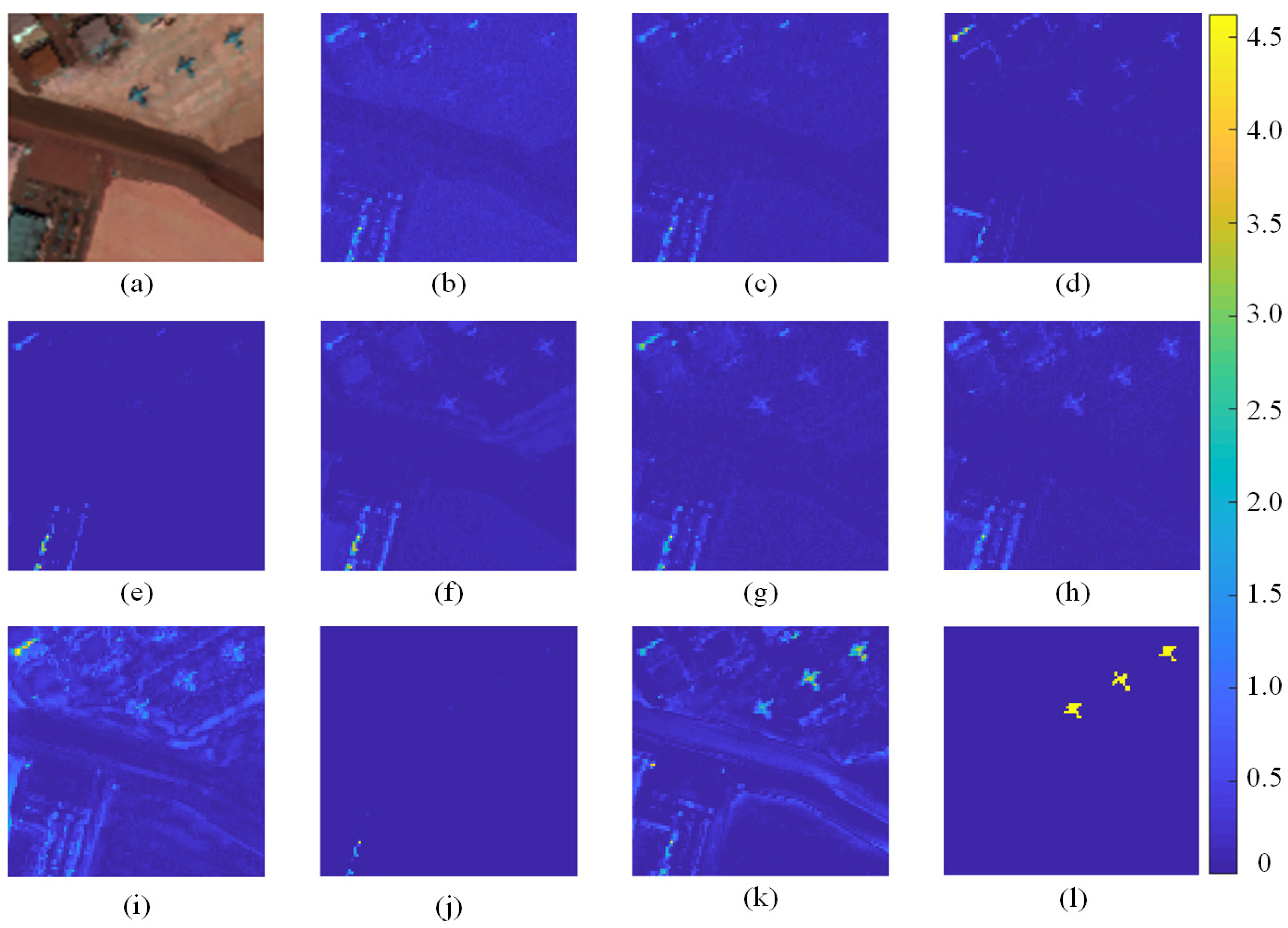
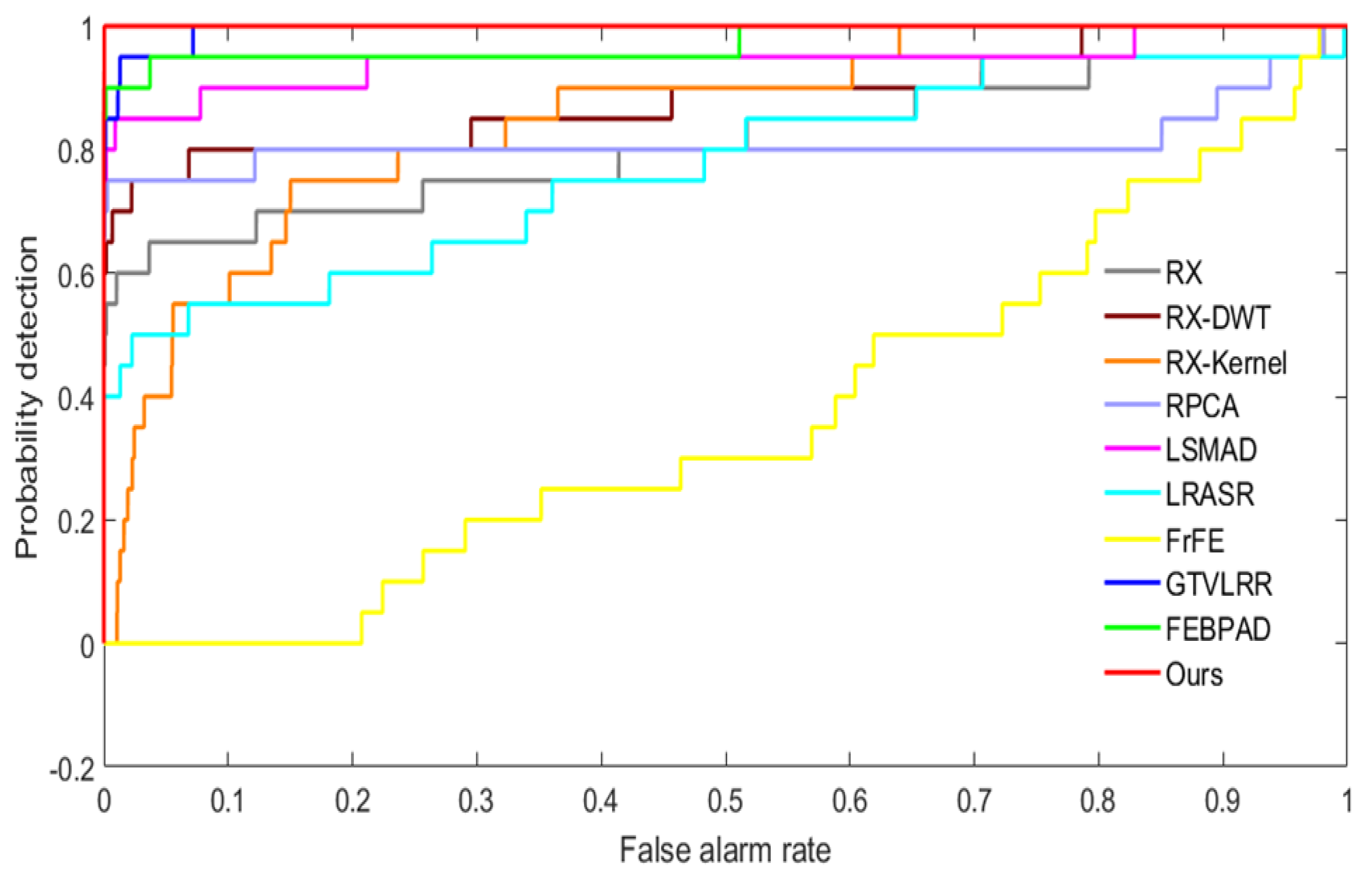
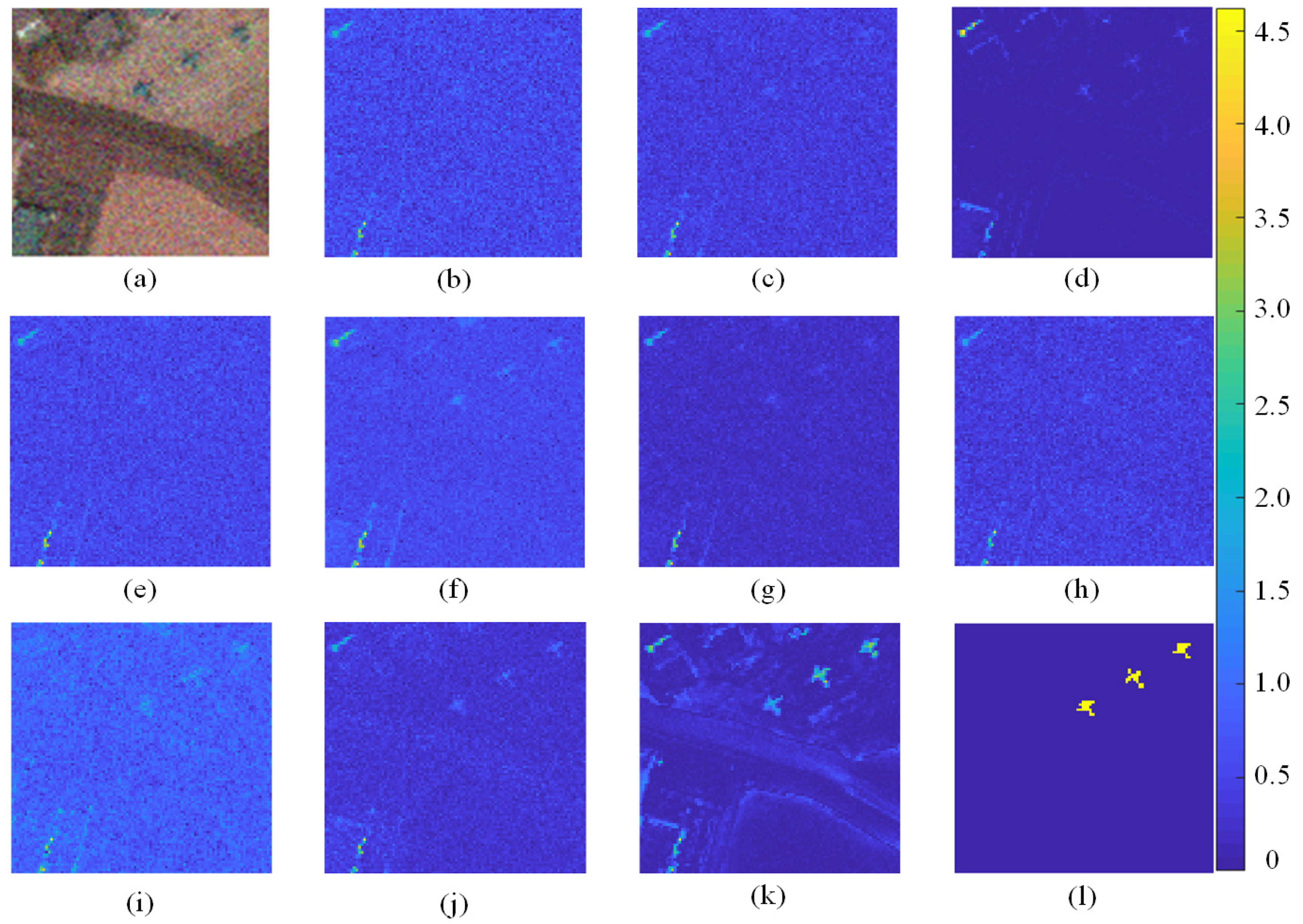
4.1. Detection Performance Analysis
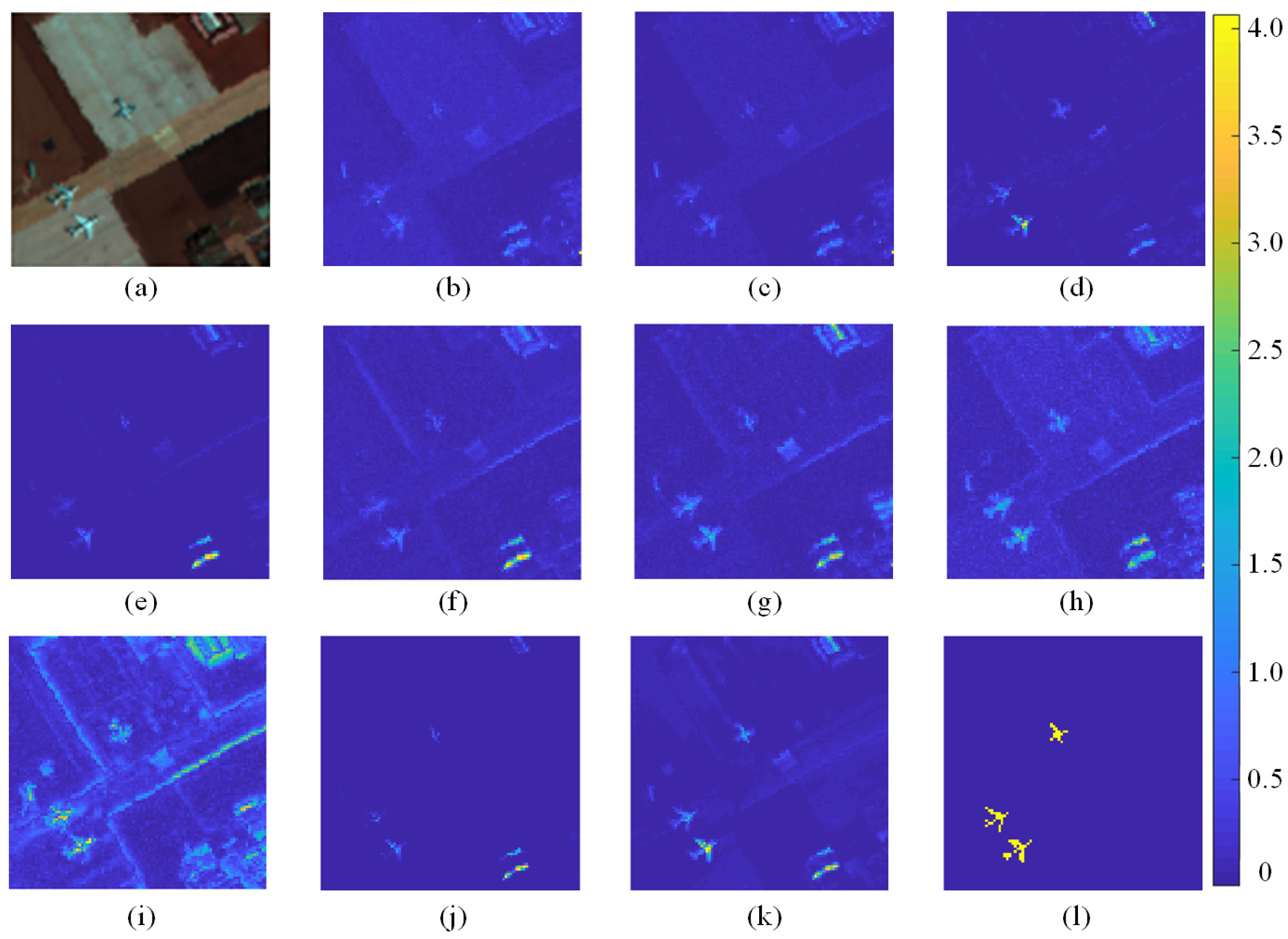
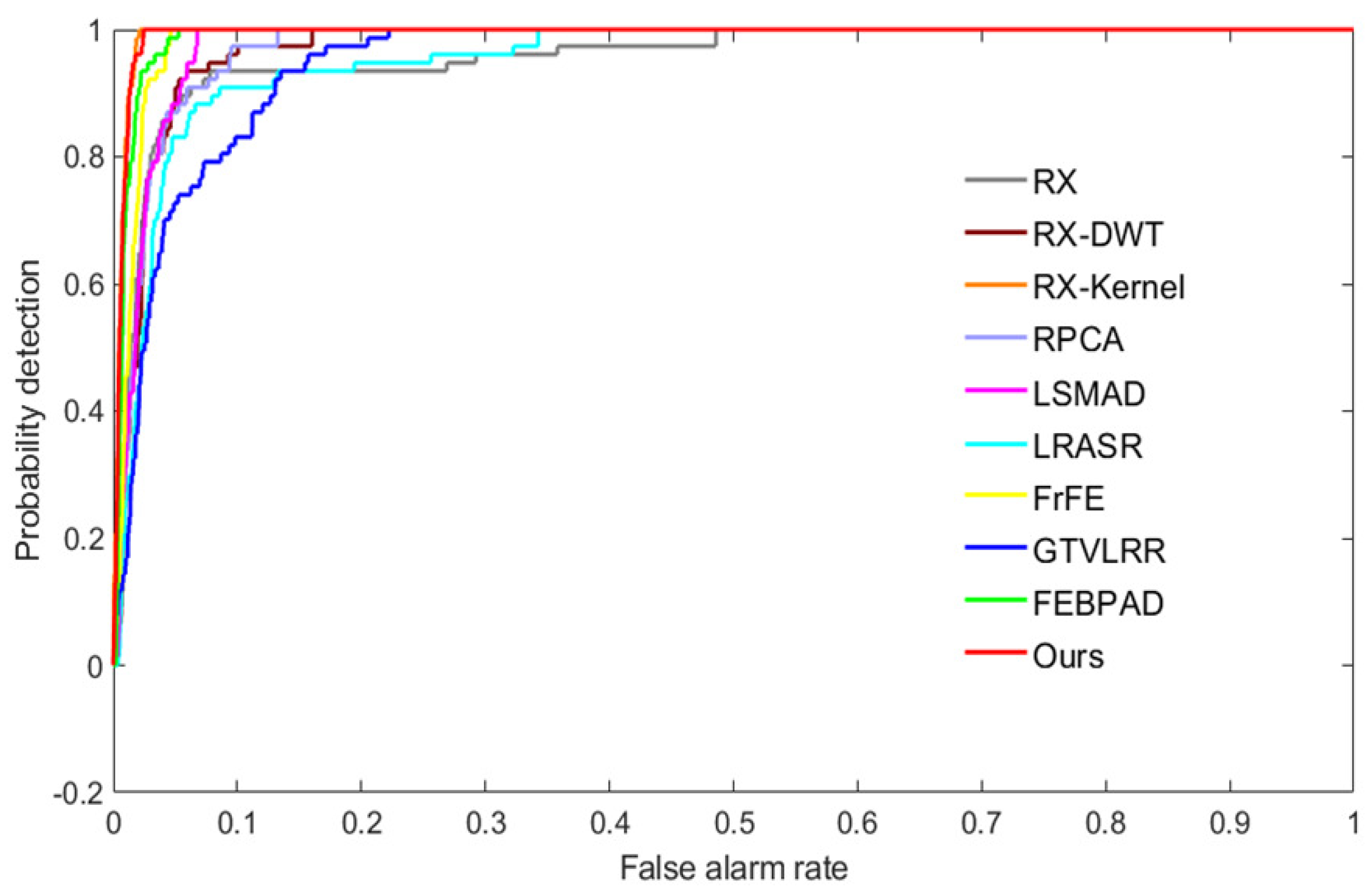
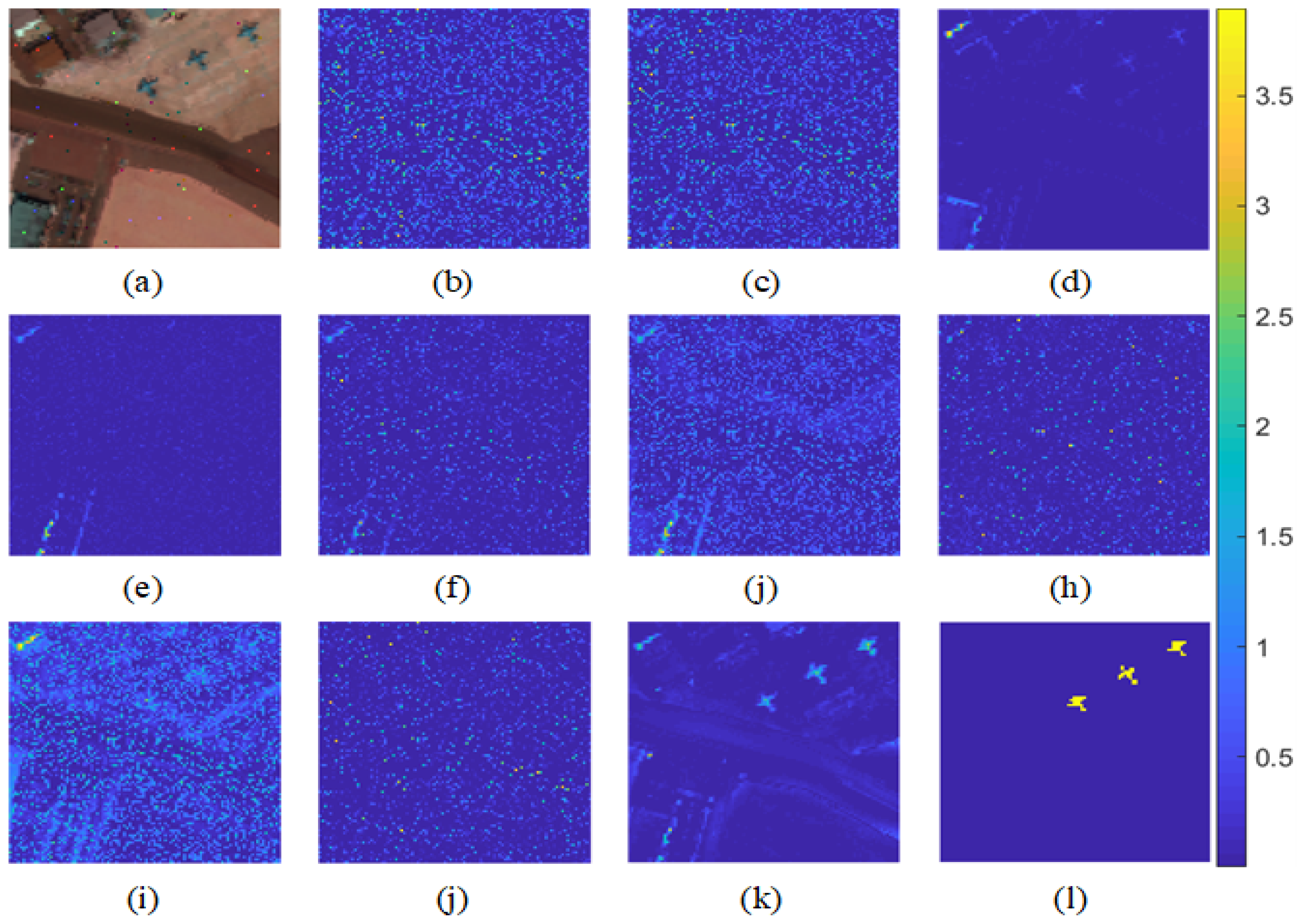
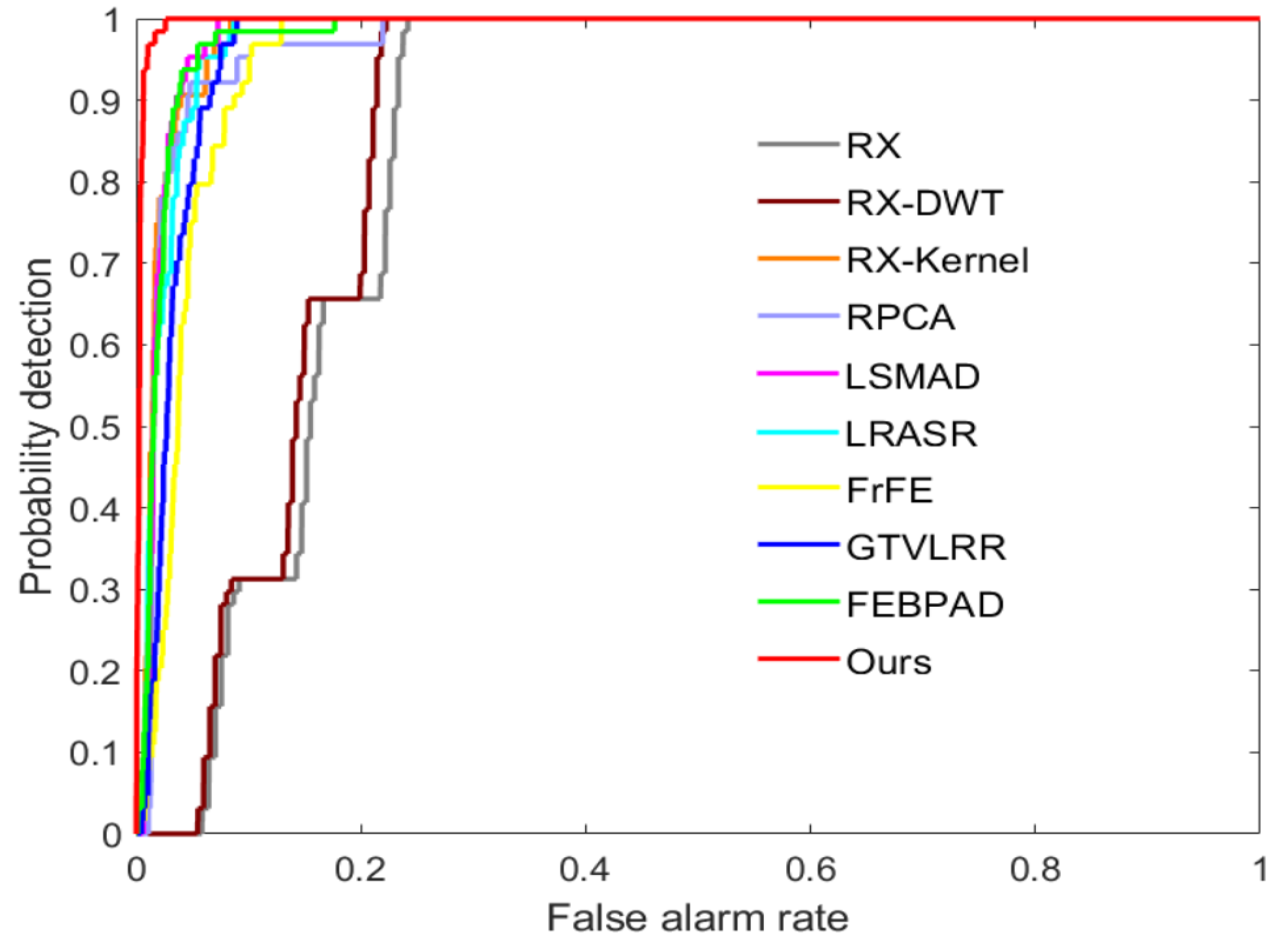
4.1.1. The AVIRIS-I Dataset
4.1.2. The AVIRIS-II Dataset
4.1.3. The HYDICE Dataset
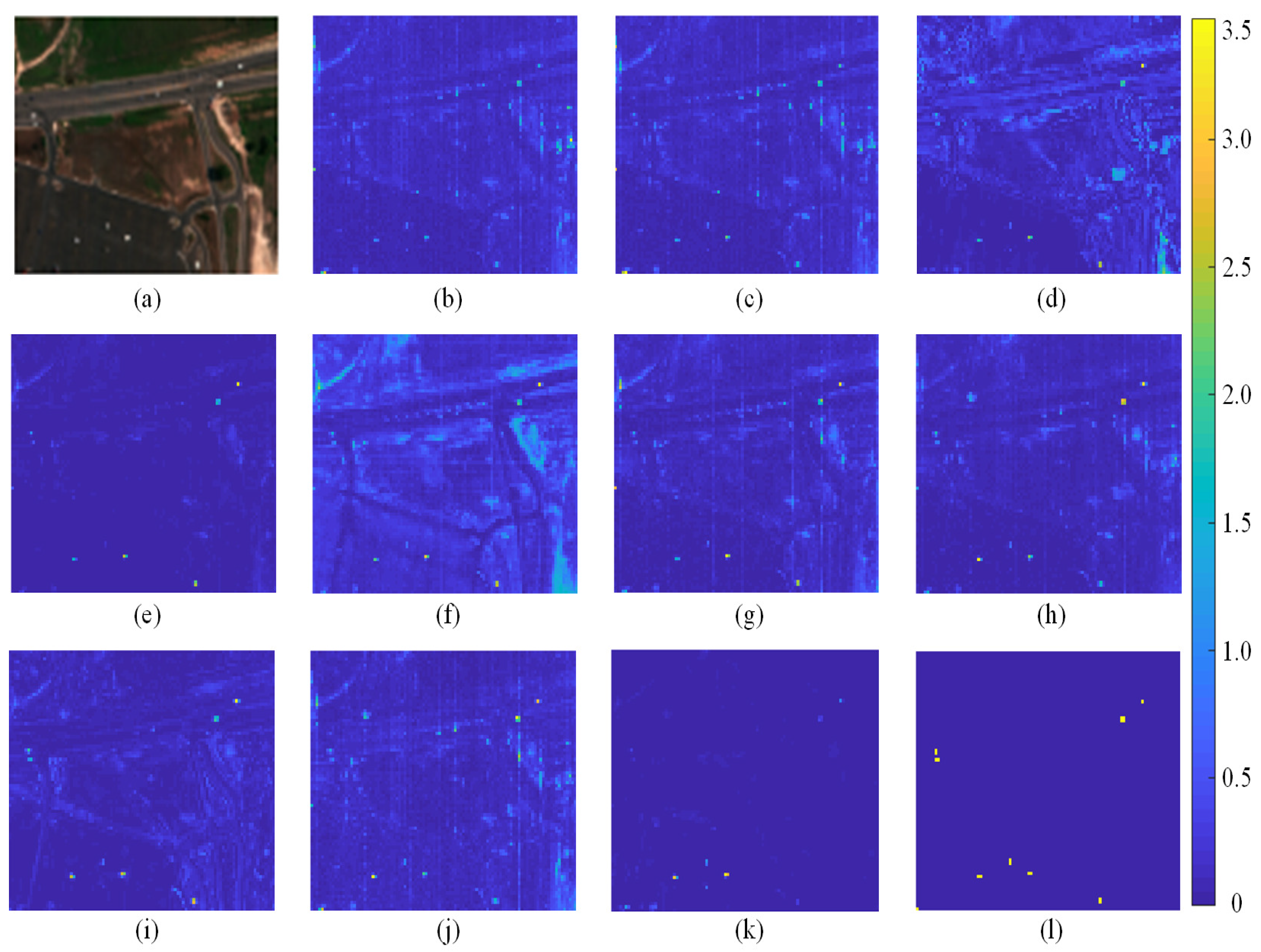
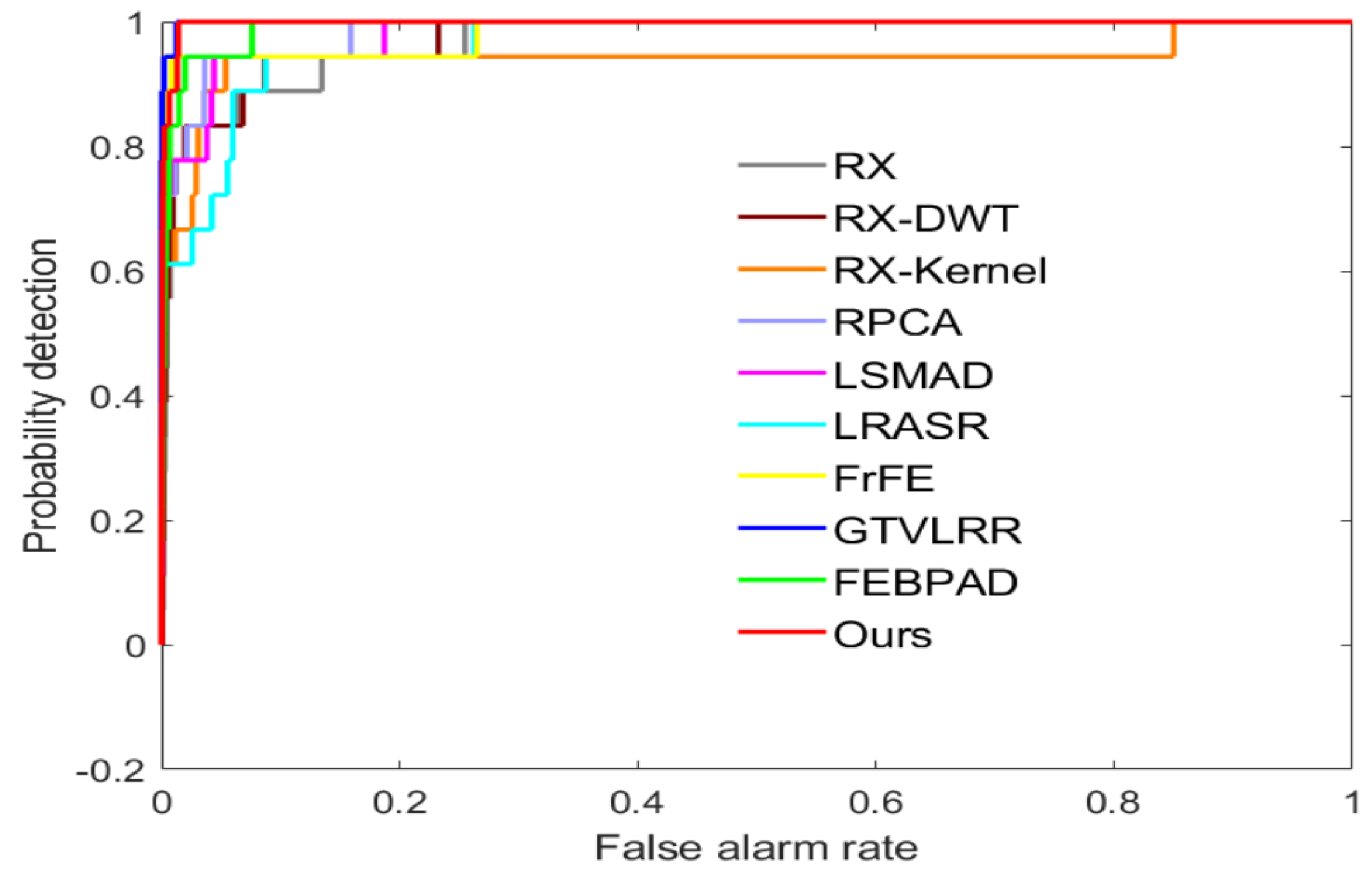
4.1.4. The Pavia Centre Dataset
4.1.5. The Simulated Dataset
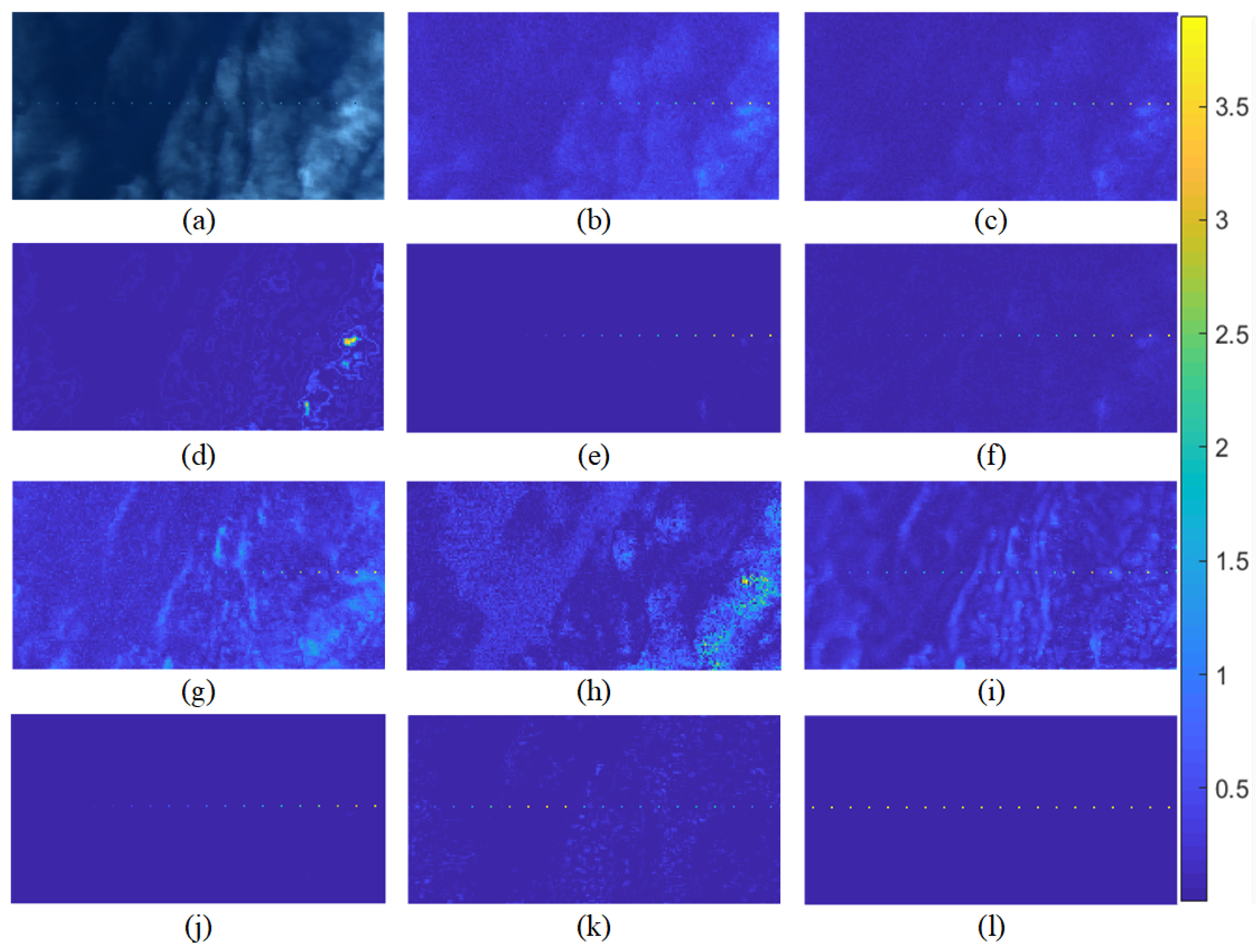
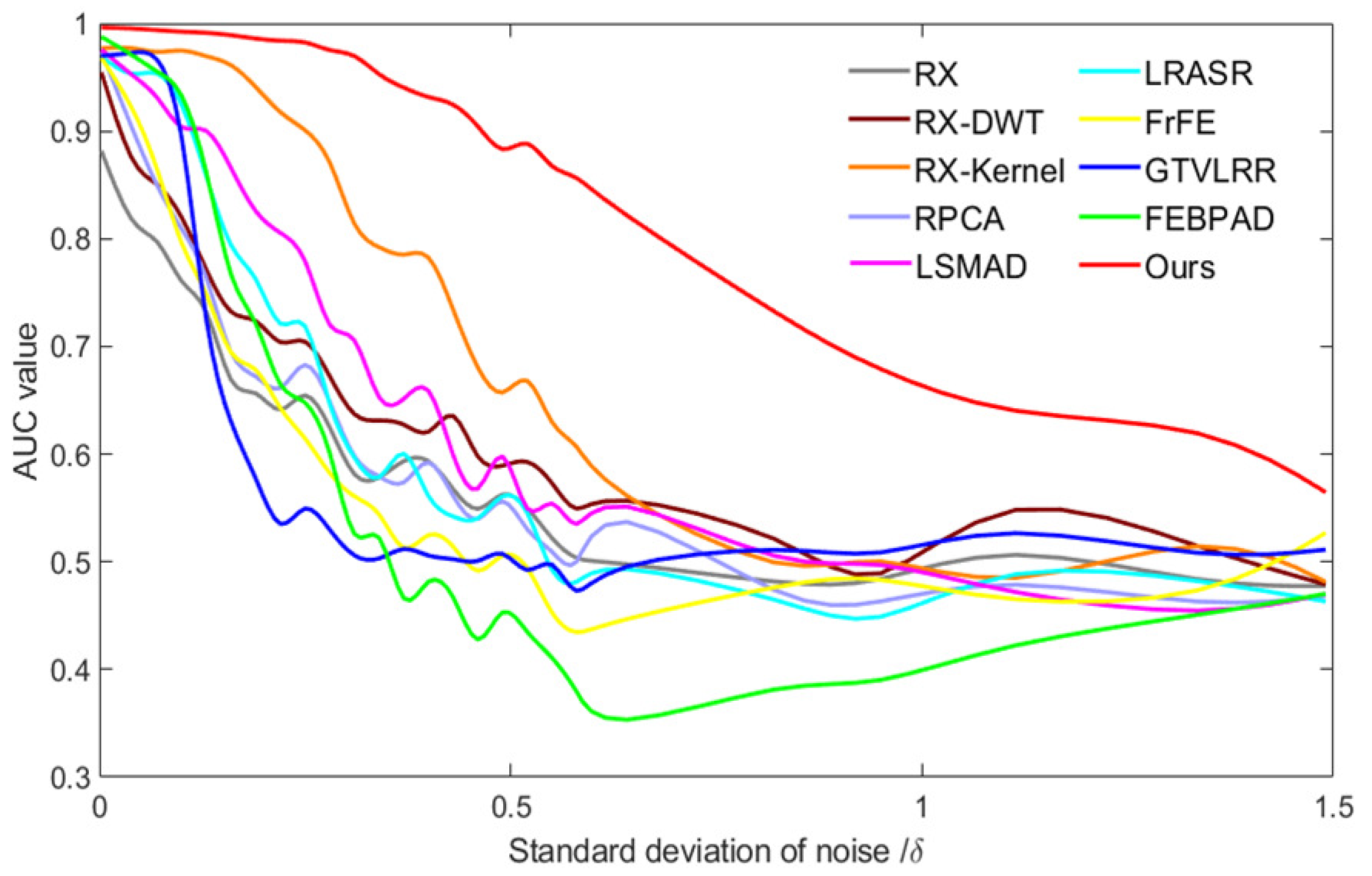
4.2. Noise Interference
4.3. Time Cost
4.4. Detection Performance Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ghamisi, P.; Plaza, J.; Chen, Y.; Li, J.; Plaza, A. Advanced Spectral Classifiers for Hyperspectral Images: A Review. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–32. [Google Scholar] [CrossRef] [Green Version]
- Jafarzadeh, H.; Hasanlou, M. An Unsupervised Binary and Multiple Change Detection Approach for Hyperspectral Imagery Based on Spectral Unmixing. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 4888–4906. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, B.; Wang, W. An Efficient Spectral Feature Extraction Framework for Hyperspectral Images. Remote Sens. 2020, 12, 3967. [Google Scholar] [CrossRef]
- Tan, K.; Hou, Z.; Ma, D.; Chen, Y.; Du, Q. Anomaly Detection in Hyperspectral Imagery Based on Low-Rank Representation Incorporating a Spatial Constraint. Remote Sens. 2019, 11, 1578. [Google Scholar] [CrossRef] [Green Version]
- Shimoni, M.; Haelterman, R.; Perneel, C. Hypersectral Imaging for Military and Security Applications: Combining Myriad Processing and Sensing Techniques. IEEE Geosci. Remote Sens. Mag. 2019, 7, 101–117. [Google Scholar] [CrossRef]
- Karami, A.; Heylen, R.; Scheunders, P. Hyperspectral image noise reduction and its effect on spectral unmixing. In Proceedings of the 2014 6th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Lausanne, Switzerland, 24–27 June 2014; pp. 1–4. [Google Scholar]
- Zhang, C.; Zhou, L.; Zhao, Y.; Zhu, S.; Liu, F.; He, Y. Noise reduction in the spectral domain of hyperspectral images using denoising autoencoder methods. Chemom. Intell. Lab. Systems. 2020, 203, 104063. [Google Scholar] [CrossRef]
- Awad, M. Forest mapping: A comparison between hyperspectral and multispectral images and technologies. J. For. Res. 2018, 29, 1395–1405. [Google Scholar] [CrossRef]
- Reed, I.S.; Yu, X. Adaptive Multiple-Band CFAR Detection of an Optical Pattern with Unknown Spectral Distribution. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Chang, C.I.; Chiang, S.S. Anomaly Detection and Classification for Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1314–1325. [Google Scholar] [CrossRef] [Green Version]
- Kwon, H.; Nasrabadi, N.M. Kernel RX-Algorithm: A Nonlinear Anomaly Detector for Hyper-Spectral Imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 388–397. [Google Scholar] [CrossRef]
- Matteoli, S.; Veracini, T.; Diani, M.; Corsini, G. A Locally Adaptive Background Density Estimator: An Evolution for RX-based Anomaly Detectors. IEEE Geosci. Remote Sens. Lett. 2014, 11, 323–327. [Google Scholar] [CrossRef]
- Wang, W.; Zhao, B.; Feng, F.; Nan, J.; Li, C. Hierarchical Sub-Pixel Anomaly Detection Framework for Hyperspectral Imagery. Sensors 2018, 18, 3662. [Google Scholar] [CrossRef] [Green Version]
- Tao, R.; Zhao, X.; Li, W.; Li, H.; Du, Q. Hyperspectral Anomaly Detection by Fractional Fourier Entropy. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 4920–4929. [Google Scholar] [CrossRef]
- Chen, S.-Y.; Yang, S.; Kalpakis, K.; Chang, C.-I. Low-rank Decomposition-based Anomaly Detection. Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XIX, Baltimore, MD, USA, 18 May 2013; 8743, p. 87430N. [Google Scholar]
- Zhang, Y.; Du, B.; Zhang, L.; Wang, S. A Low-Rank and Sparse Matrix Decomposition-Based Mahalanobis Distance Method for Hyperspectral Anomaly Detection. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1376–1389. [Google Scholar] [CrossRef]
- Xu, Y.; Wu, Z.; Li, J.; Plaza, A. Anomaly Detection in Hyperspectral Images Based on Low-Rank and Sparse Representation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1990–2000. [Google Scholar] [CrossRef]
- Zhang, L.; Cheng, B.; Deng, Y. A Tensor-based Adaptive Subspace Detector for Hyperspectral Anomaly Detection. Int. J. Remote Sens. 2018, 39, 2366–2382. [Google Scholar] [CrossRef]
- Cheng, T.; Wang, B. Graph and Total Variation Regularized Low-rank Representation for Hyperspectral Anomaly Detection. IEEE Trans. Geosci. Remote Sens. 2019, 58, 391–406. [Google Scholar] [CrossRef]
- Ma, Y.; Fan, G.; Jin, Q. Hyperspectral Anomaly Detection via Integration of Feature Extraction and Background Purification. IEEE Geosci. Remote Sens. Lett. 2020. Early access. [Google Scholar] [CrossRef]
- Huyan, N.; Zhang, X.; Zhou, H.; Jiao, L. Hyperspectral Anomaly Detection via Background and Potential Anomaly Dictionaries Construction. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2263–2276. [Google Scholar] [CrossRef] [Green Version]
- Xiang, P.; Song, J.; Li, H.; Gu, L. Zhou, H. Hyperspectral Anomaly Detection with Harmonic Analysis and Low-Rank Decomposition. Remote Sens. 2019, 11, 3028. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Hou, Z.; Li, W.; Tao, R.; Orlando, D.; Li, H. Multipixel Anomaly Detection With Unknown Patterns for Hyperspectral Imagery. IEEE Trans. Neural Netw. Learn. Syst. 2021. Early access. [Google Scholar]
- Zhao, C.; Wang, X.; Zhao, G. Detection of hyperspectral anomalies using density estimation and collaborative representation. Remote Sens. Lett. 2017, 8, 1025–1033. [Google Scholar] [CrossRef]
- Machidon, A.L.; Del Frate, F.; Picchiani, M.; Machidon, O.M.; Ogrutan, P.L. Geometrical Approximated Principal Component Analysis for Hyperspectral Image Analysis. Remote Sens. 2020, 12, 1698. [Google Scholar] [CrossRef]
- Uddin, M.P.; Mamun, M.A.; Afjal, M.I.; Hossain, M.A. Information-theoretic Feature Selection with Segmentation-based Folded Principal Component Analysis (PCA) for Hyperspectral Image Classification. Int. J. Remote Sens. 2021, 42, 286–321. [Google Scholar] [CrossRef]
- Stephan, K.; Hibbitts, C.A.; Hoffmann, H.; Jaumann, R. Reduction of Instrument-dependent Noise in Hyperspectral Image Data using the Principal Component Analysis: Applications to Galileo NIMS Data. Planet. Space Sci. 2008, 56, 406–419. [Google Scholar] [CrossRef]
- He, K.; Sun, J. Fast Guided Filter. arXiv 2015, arXiv:1505.00996. [Google Scholar]
- Fauvel, M.; Chanussot, J.; Benediktsson, J.A. Kernel Principal Component Analysis for Feature Reduction in Hyperspectral Image Analysis. In Proceedings of the 7th Nordic Signal Processing Symposium—NORSIG 2006, Reykjavik, Iceland, 7–9 June 2006. [Google Scholar]
- Franchi, G.; Angulo, J. Morphological Principal Component Analysis for Hyperspectral Image Analysis. Int. J. Geo-Inf. 2016, 5, 83. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Sun, J.; Tang, X. Guided Image Filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 6, 1397–1409. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans Image Process. 2008, 13, 600–612. [Google Scholar] [CrossRef] [Green Version]
- Shi, C.; Pun, C.M. Superpixel-based 3D Deep Neural Networks for Hyperspectral Image Classification. Pattern Recogn. 2017, 74, 600–616. [Google Scholar] [CrossRef]
- Hyperspectral Github Toolboxes. Available online: https://github.com/davidkun/HyperSpectralToolbox (accessed on 1 March 2018).
- FrFE Github Toolboxes. Available online: https://github.com/xudongzhao461 (accessed on 17 September 2021.).
- LRASR Github Toolboxes. Available online: https://github.com/axiqia (accessed on 17 September 2021.).
- FEBPAD Github Toolboxes. Available online: https://github.com/l7170 (accessed on 17 September 2021.).
- Ma, D.; Yuan, Y.; Wang, Q. Hyperspectral Anomaly Detection via Discriminative Feature Learning with Multiple-Dictionary Sparse Representation. Remote Sens. 2018, 10, 745. [Google Scholar] [CrossRef] [Green Version]
- Chang, C. Multiparameter Receiver Operating Characteristic Analysis for Signal Detection and Classification. IEEE Sens. J. 2010, 10, 423–442. [Google Scholar] [CrossRef]
- Du, B.; Huang, Z.; Wang, N.; Zhang, Y.; Jia, X. Joint weighted nuclear norm and total variation regularization for hyperspectral image denoising. Int. J. Remote Sens. 2018, 39, 334–355. [Google Scholar] [CrossRef]
- Acito, N.; Diani, M.; Corsini, G. Signal-Dependent Noise Modeling and Model Parameter Estimation in Hyperspectral Images. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2957–2971. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Full Name | Reference |
|---|---|---|
| RX | Reed–Xiaoli | [9] |
| RX-Kernel | Reed–Xiaoli Kernel | [11] |
| Local RX | Local Reed–Xialli | [12] |
| Hierarchical RX | Hierarchical Reed–Xiaoli | [13] |
| RX-DWT | Reed–Xiaoli Discrete Wavelet Transform | [14] |
| FrFE | Fractional Fourier Entropy | [14] |
| RPCA | Robust Principal Component Analysis | [15] |
| LSMAD | Low-rank and Sparse matrix decomposition-based Mahalanobis distance for Anomaly Detection | [16] |
| LRASR | Low-Rank And Sparse Representation | [17] |
| TBASD | Tensor-Based Adaptive Subspace Detection | [18] |
| GTVLRR | Graph and Total Variation regularized Low-Rank Representation | [19] |
| FEBPAD | Feature Extraction and Background Purification Anomaly Detection | [20] |
| Dataset | RX | RX-DWT | RX-Kernel | RPCA | LSMAD |
|---|---|---|---|---|---|
| 1 | 0.8865 | 0.9607 | 0.9768 | 0.9782 | 0.9773 |
| 2 | 0.9578 | 0.9737 | 0.9941 | 0.9739 | 0.9781 |
| 3 | 0.9700 | 0.9743 | 0.9419 | 0.9852 | 0.9813 |
| 4 | 0.9538 | 0.9659 | 0.9515 | 0.9570 | 0.9704 |
| 5 | 0.8107 | 0.8828 | 0.8493 | 0.8105 | 0.9435 |
| Dataset | LRASR | FrFE | GTVLRR | FEBPAD | Ours |
| 1 | 0.9704 | 0.9708 | 0.9697 | 0.9886 | 0.9971 |
| 2 | 0.9550 | 0.9853 | 0.9532 | 0.9899 | 0.9937 |
| 3 | 0.9665 | 0.9837 | 0.9990 | 0.9917 | 0.9975 |
| 4 | 0.9592 | 0.8119 | 0.9817 | 0.9354 | 0.9752 |
| 5 | 0.7697 | 0.3622 | 0.9950 | 0.9725 | 0.9999 |
| Noise | RX | RX-DWT | RX-Kernel | RPCA | LSMAD | LRASR | FrFE | GTVLRR | FEBPAD | Proposed |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.00 | 0.8865 | 0.9607 | 0.9768 | 0.9782 | 0.9773 | 0.9704 | 0.9708 | 0.9697 | 0.9886 | 0.9971 |
| 0.10 | 0.7541 | 0.8233 | 0.9767 | 0.8090 | 0.8954 | 0.9311 | 0.7890 | 0.9187 | 0.9424 | 0.9922 |
| 0.22 | 0.6307 | 0.6959 | 0.9156 | 0.6501 | 0.8053 | 0.7056 | 0.6389 | 0.5192 | 0.6522 | 0.9835 |
| 0.31 | 0.5722 | 0.6303 | 0.8043 | 0.5902 | 0.7215 | 0.5946 | 0.5587 | 0.5021 | 0.5019 | 0.9728 |
| 0.40 | 0.5988 | 0.6115 | 0.7936 | 0.6062 | 0.6761 | 0.5522 | 0.5321 | 0.5040 | 0.4920 | 0.9307 |
| 0.52 | 0.5522 | 0.5980 | 0.6836 | 0.5255 | 0.5283 | 0.5547 | 0.5008 | 0.4834 | 0.4325 | 0.8972 |
| 0.61 | 0.5016 | 0.5680 | 0.5680 | 0.5680 | 0.5723 | 0.5039 | 0.4430 | 0.4993 | 0.3385 | 0.8359 |
| 0.84 | 0.4783 | 0.5246 | 0.4811 | 0.4560 | 0.4909 | 0.4633 | 0.4807 | 0.5162 | 0.3909 | 0.7214 |
| 0.94 | 0.4773 | 0.4613 | 0.5121 | 0.4592 | 0.5046 | 0.4335 | 0.4891 | 0.5002 | 0.3822 | 0.6799 |
| 1.10 | 0.5197 | 0.5769 | 0.4681 | 0.4882 | 0.4700 | 0.5024 | 0.4603 | 0.5385 | 0.4249 | 0.6337 |
| 1.35 | 0.4772 | 0.5092 | 0.5334 | 0.4561 | 0.4472 | 0.4822 | 0.4633 | 0.5007 | 0.4519 | 0.6297 |
| 1.50 | 0.4776 | 0.4770 | 0.4779 | 0.4690 | 0.4721 | 0.4619 | 0.5311 | 0.5120 | 0.4715 | 0.5603 |
| Dataset | RX | RX-DWT | RX-Kernel | RPCA | LSMAD |
|---|---|---|---|---|---|
| 224 bands | 0.8454 | 0.8579 | 0.9798 | 0.9711 | 0.9795 |
| Dataset | LRASR | FrFE | GTVLRR | FEBPAD | Ours |
| 224 bands | 0.9764 | 0.9566 | 0.9675 | 0.9782 | 0.9964 |
| Dataset | RX | RX-DWT | RX-Kernel | RPCA | LSMAD |
|---|---|---|---|---|---|
| 1 | 0.0988 | 4.5790 | 61.3003 | 9.0523 | 8.3447 |
| 2 | 0.0932 | 4.6329 | 77.7485 | 14.2317 | 8.4044 |
| 3 | 0.0746 | 3.3241 | 37.5660 | 6.8391 | 5.1366 |
| 4 | 0.1204 | 6.1317 | 3104.4629 | 81.842 | 14.6488 |
| 5 | 0.1822 | 7.3317 | 440.6284 | 19.8474 | 18.7047 |
| Dataset | LRASR | FrFE | GTVLRR | FEBPAD | Ours |
| 1 | 10.9892 | 15.8958 | 89.7813 | 2.3781 | 0.3772 |
| 2 | 10.8809 | 16.7092 | 94.6053 | 2.3582 | 0.3711 |
| 3 | 8.3371 | 10.9782 | 74.3376 | 1.6061 | 0.2957 |
| 4 | 19.9892 | 13.4504 | 159.1784 | 6.3693 | 1.2113 |
| 5 | 21.686 | 22.3962 | 144.936 | 5.9663 | 0.9265 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, L.; Li, Z.; Wang, W.; Zhao, B.; Pan, Y.; Tian, Y. An Efficient and Robust Framework for Hyperspectral Anomaly Detection. Remote Sens. 2021, 13, 4247. https://doi.org/10.3390/rs13214247
Tang L, Li Z, Wang W, Zhao B, Pan Y, Tian Y. An Efficient and Robust Framework for Hyperspectral Anomaly Detection. Remote Sensing. 2021; 13(21):4247. https://doi.org/10.3390/rs13214247
Chicago/Turabian StyleTang, Linbo, Zhen Li, Wenzheng Wang, Baojun Zhao, Yu Pan, and Yibing Tian. 2021. "An Efficient and Robust Framework for Hyperspectral Anomaly Detection" Remote Sensing 13, no. 21: 4247. https://doi.org/10.3390/rs13214247
APA StyleTang, L., Li, Z., Wang, W., Zhao, B., Pan, Y., & Tian, Y. (2021). An Efficient and Robust Framework for Hyperspectral Anomaly Detection. Remote Sensing, 13(21), 4247. https://doi.org/10.3390/rs13214247