
Riverbed Mapping with the Usage of Deterministic and Geo-Statistical Interpolation Methods: The Odra River Case Study


Abstract
:
1. Introduction
1.1. Fish Finders Echosounder
1.2. River Bed Mapping
2. Materials and Methods
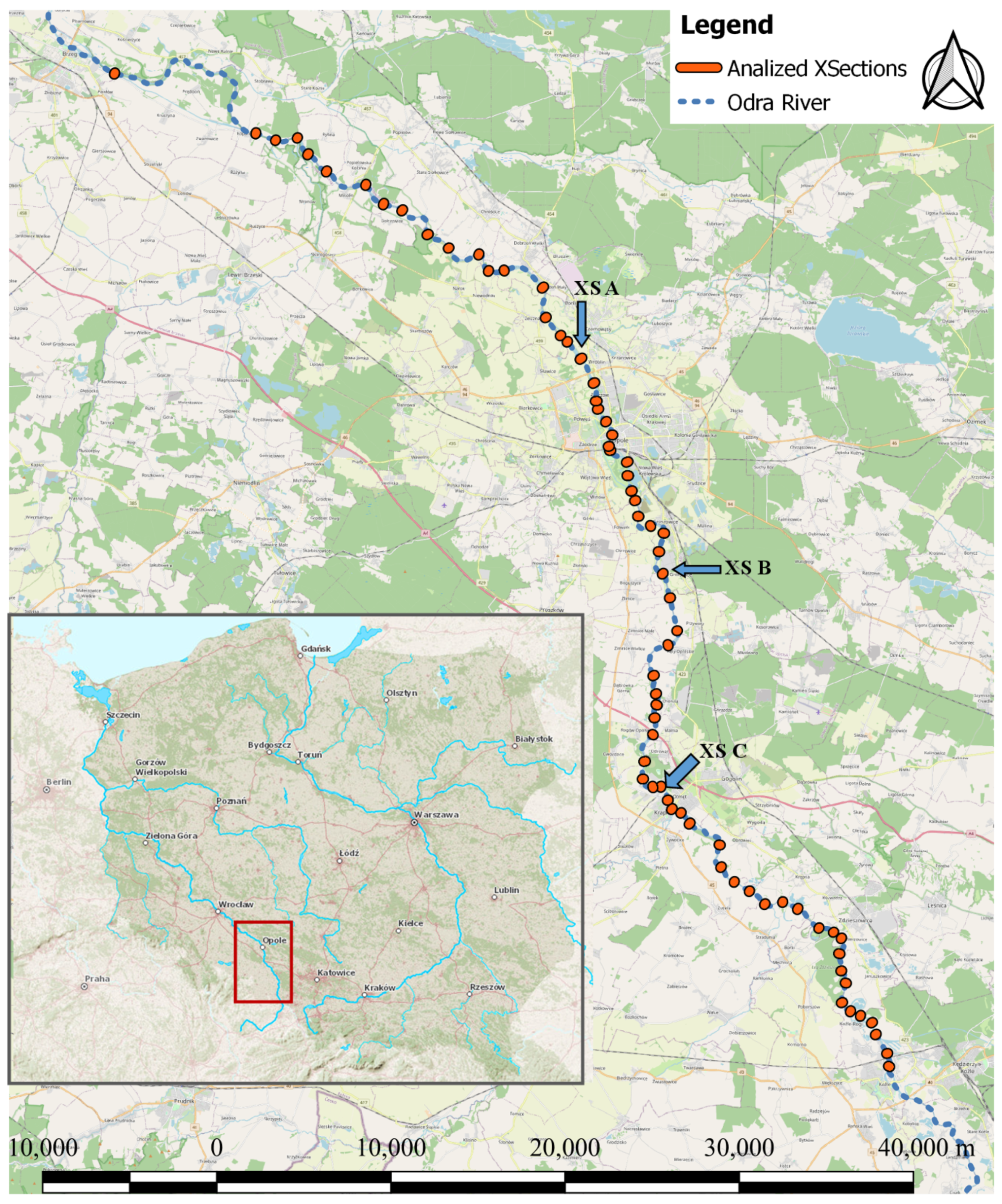
- The Upper Odra: From the source in Czequia of the river up to the city of Kędzierzyn-Koźle with a total length of 202 km;
- The Middle Odra: From Kędzierzyn-Koźle, up to the discharge of the river Warta (the main tributary of the Odra) with a total length of 522 km;
- The Lower Odra: from the river Warta up to the Dąbie lake with a length of around 130 km.
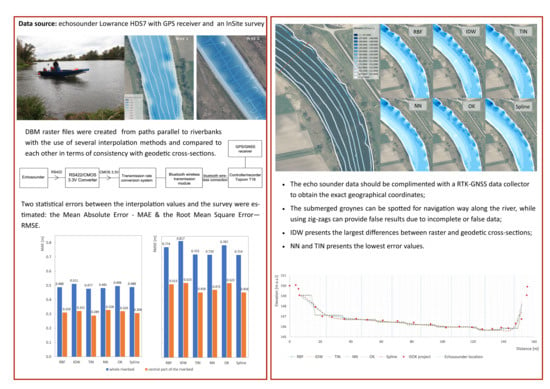
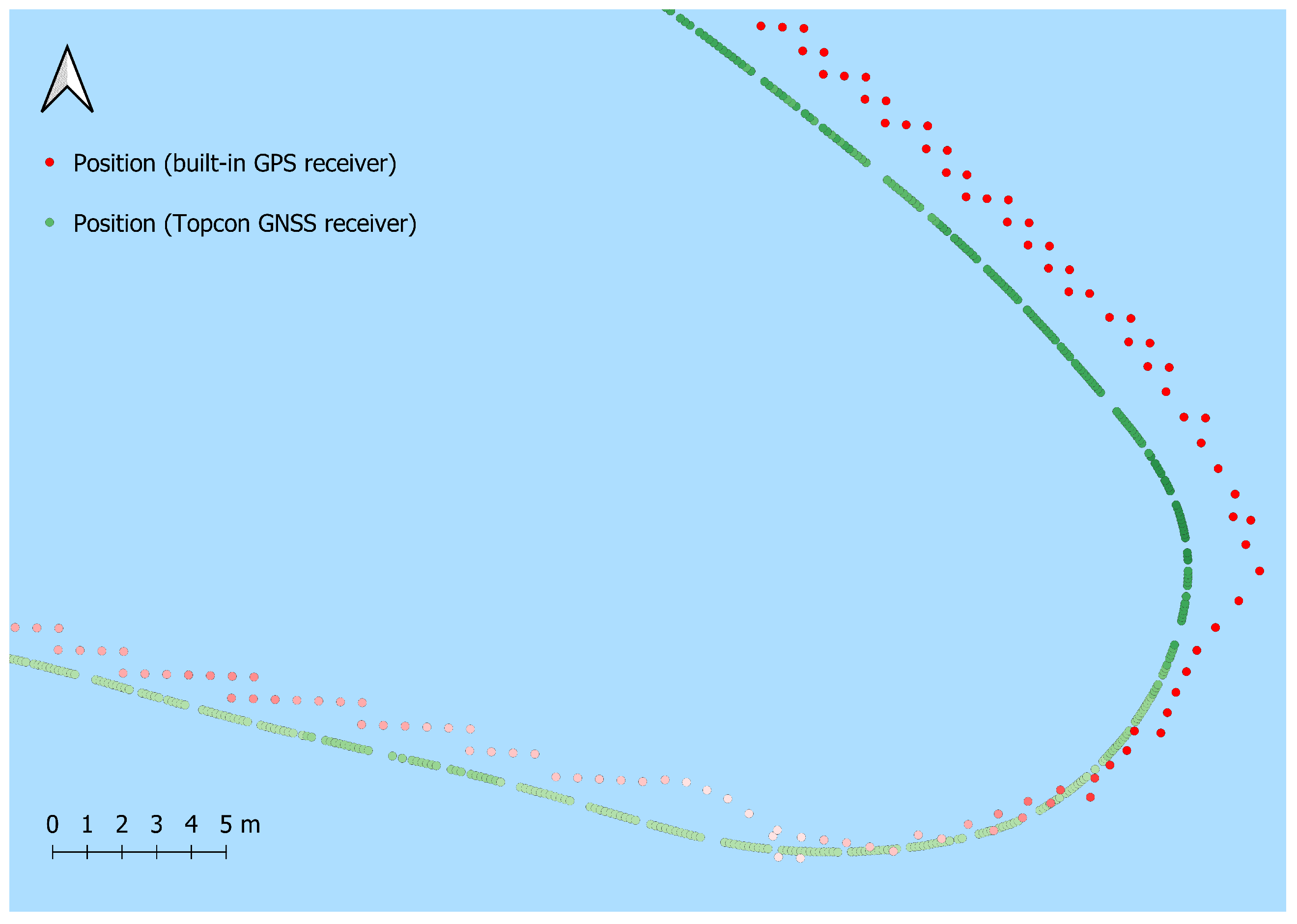
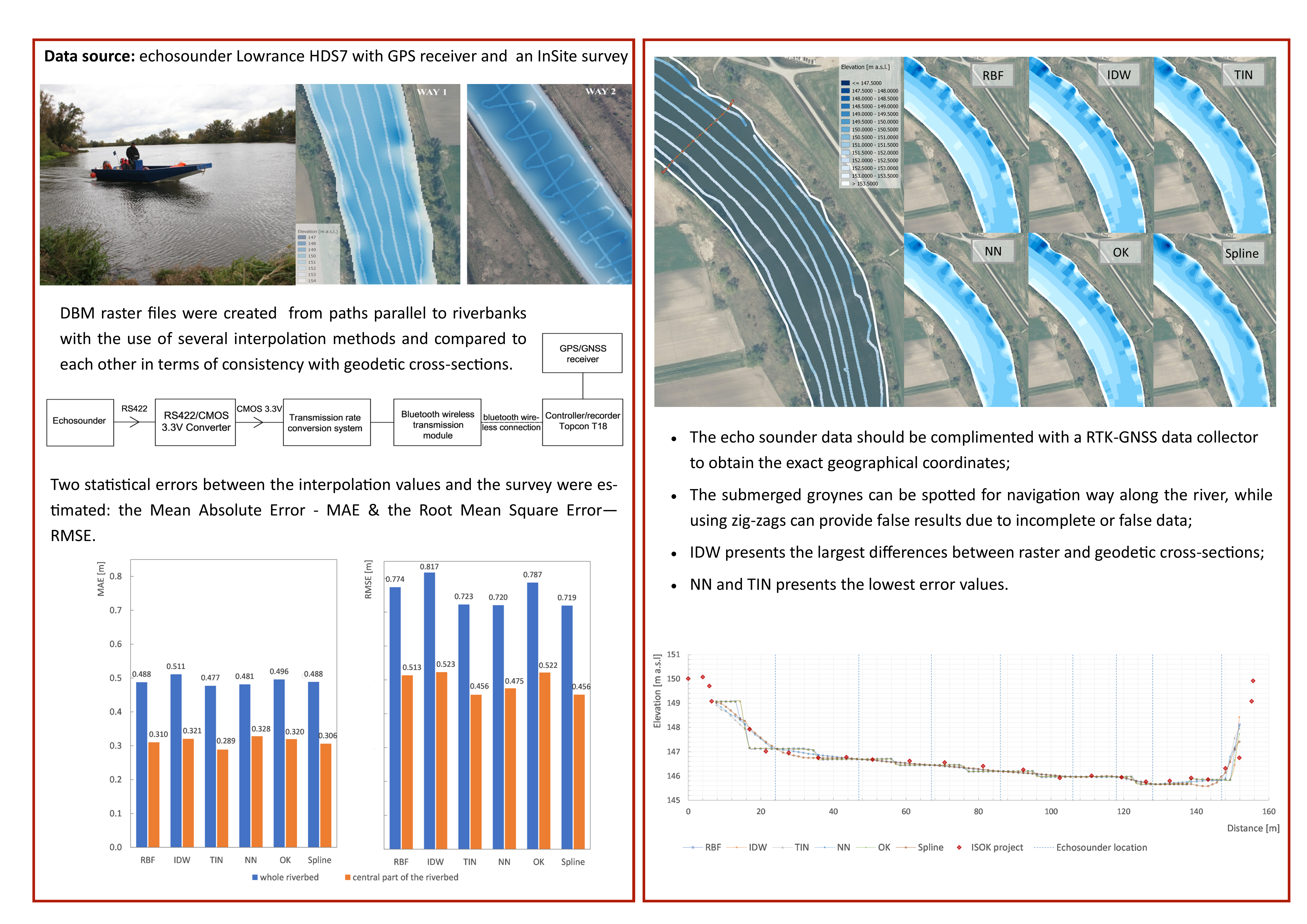
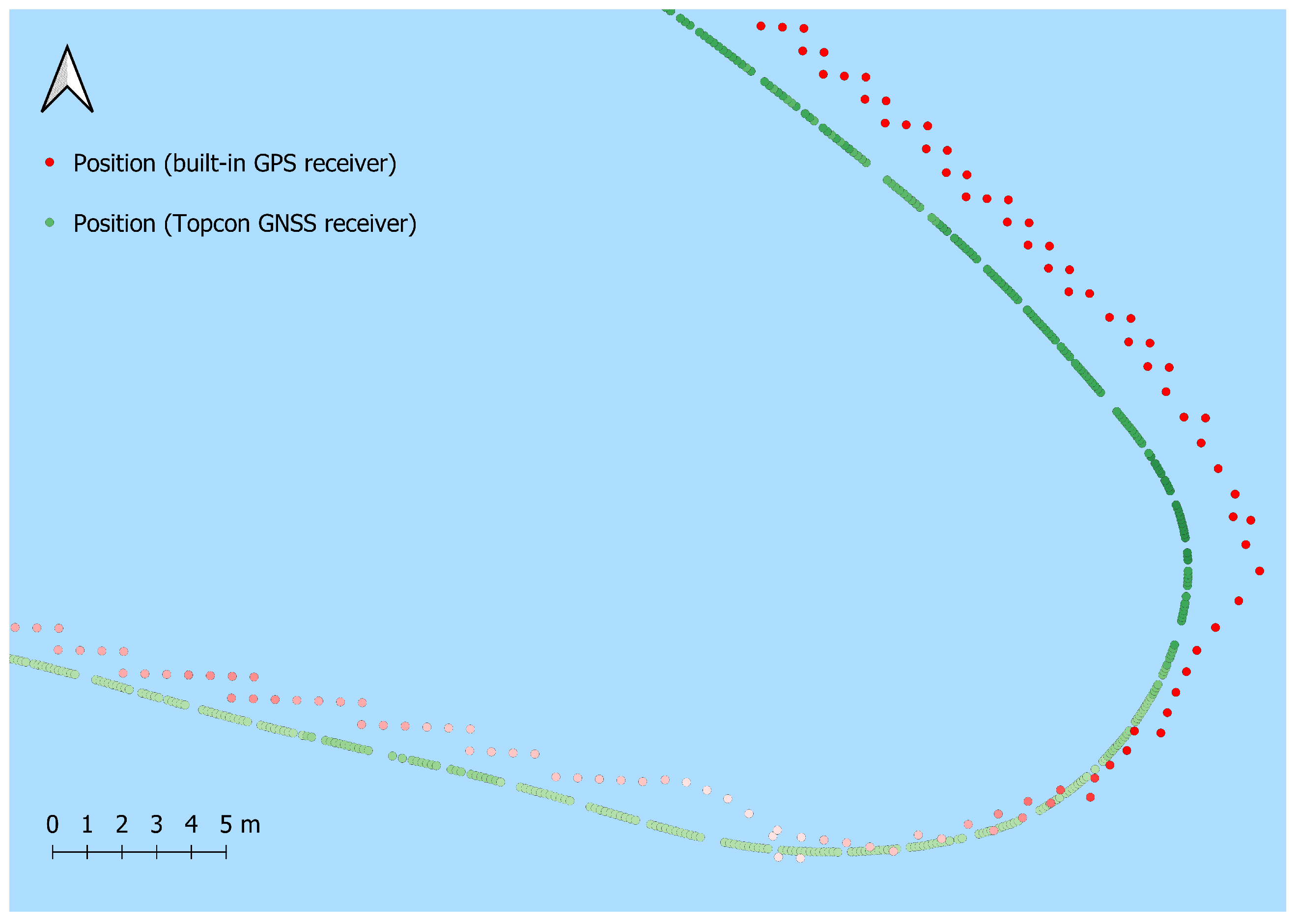
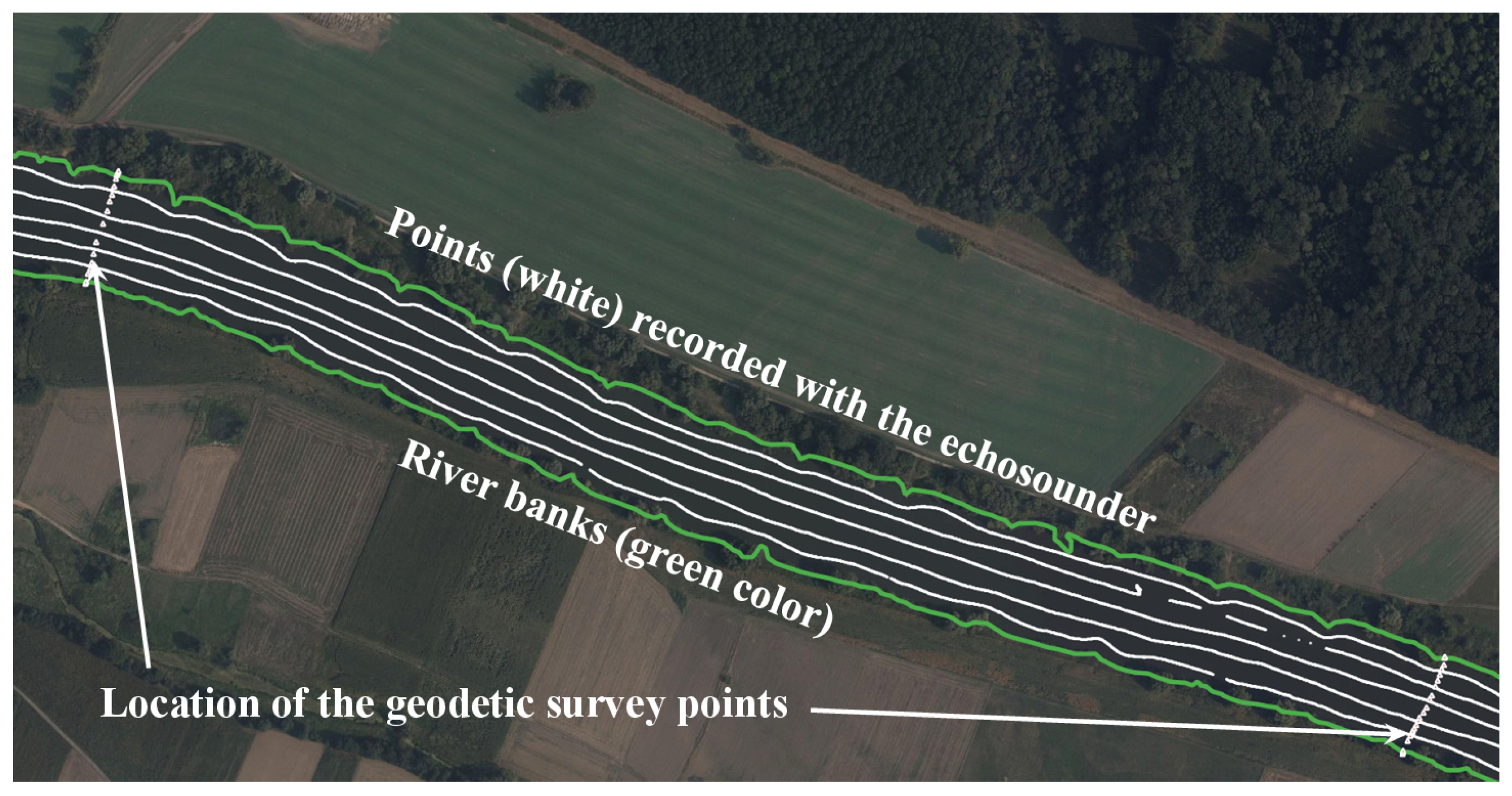
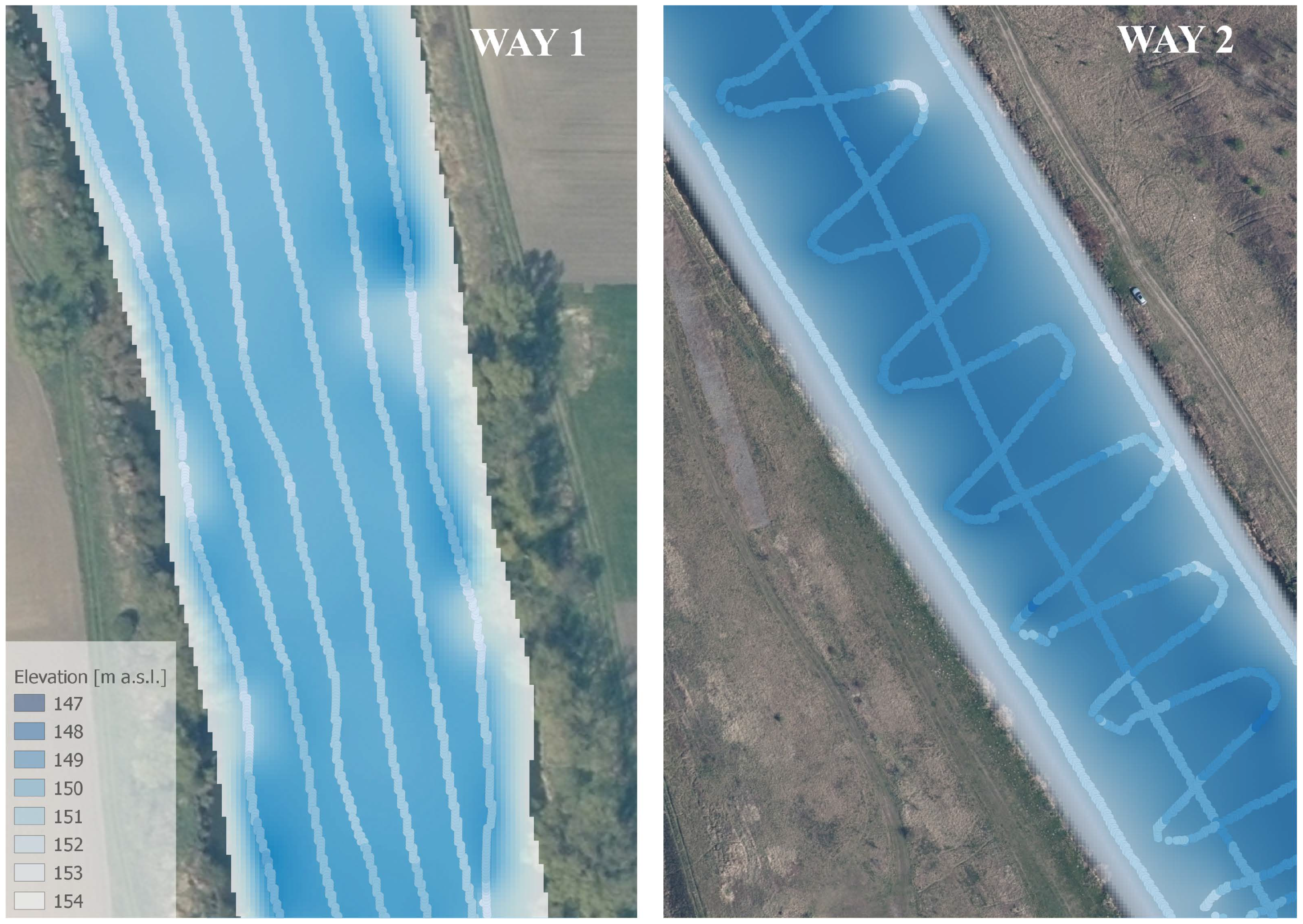
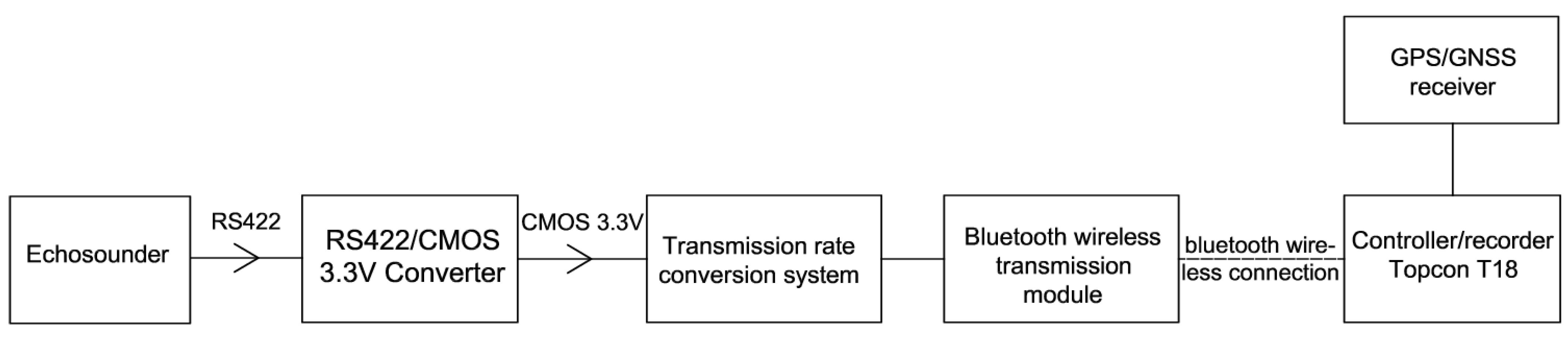
2.1. Surveying and Data Collection
2.2. Data Processing and Interpolation Methods
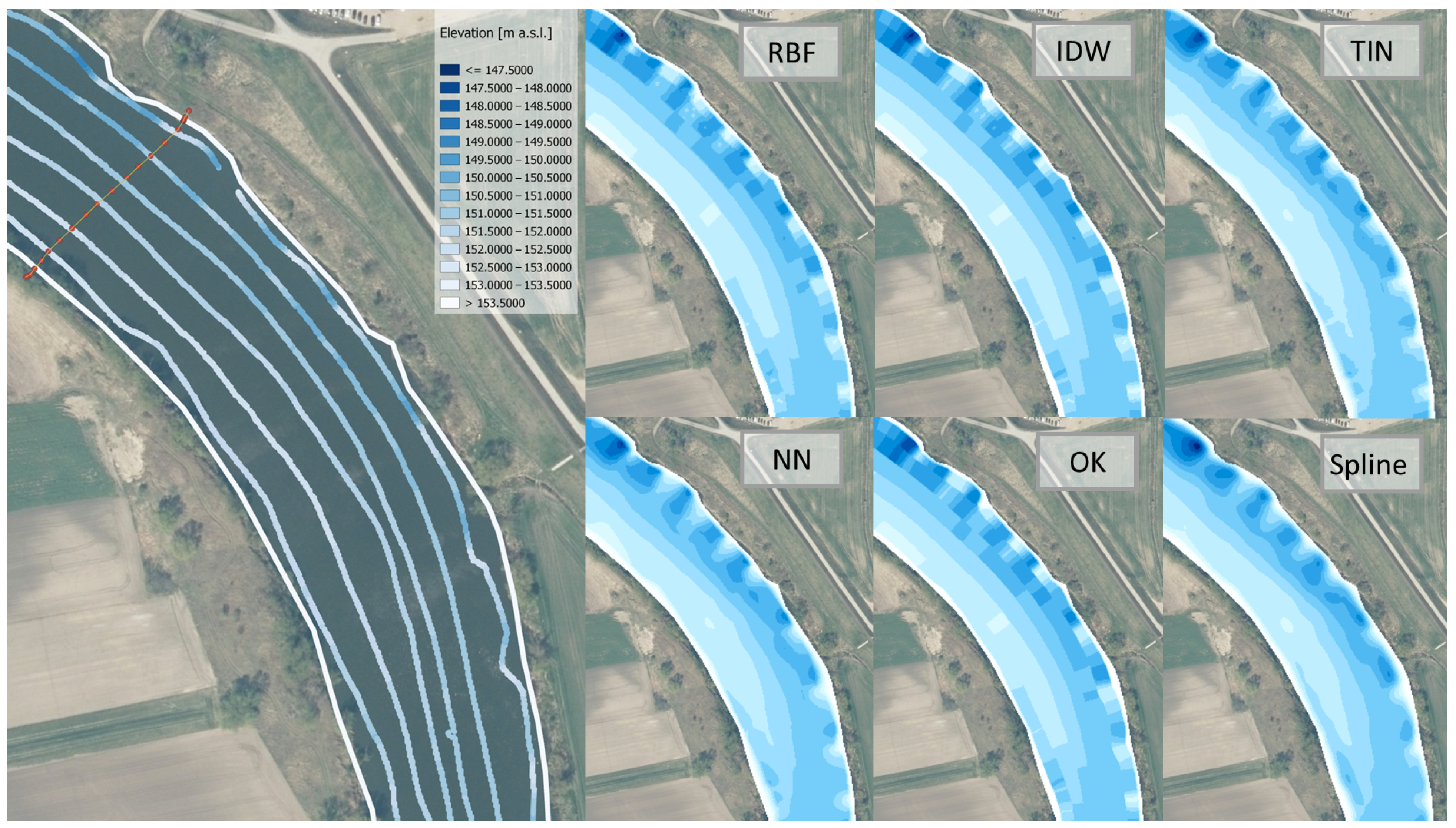
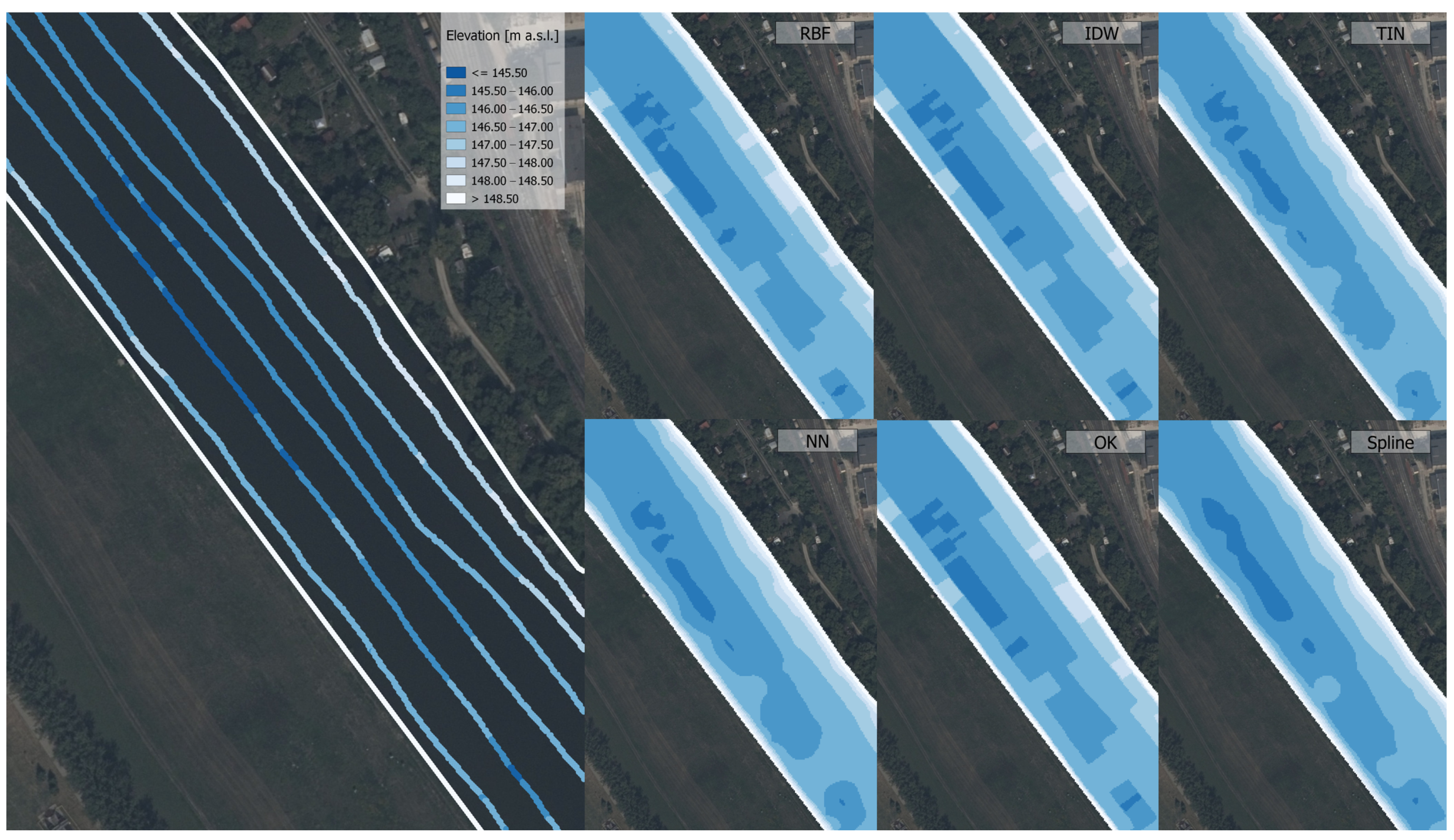
- TIN: this method where a Triangulated Irregular Network is created with the use of the Delaunay Triangulation procedure and the values are calculated from three vertices of a given triangle;
- Spline: this method uses functions minimizing the overall surface curvature and yields a smooth surface. Paramasivam & Venkatramanan [27] recommend using this method for gently varying surfaces, such as elevation, water table height, or pollution;
- IDW: it is considered as the simplest interpolation method [27]. Its interpolated value is a weighted average of point values in the neighborhood with inverse distance as weight;
- Multiquadric RBF: it is a group of deterministic methods, giving a smooth surface passing through the data points, with the possibility of obtaining values that are out of the measured range;
- NN: it is a method of interpolation based on Voronoi polygons—only neighboring polygons contribute to the interpolated value, with the weight depending of cut area;
- Kriging: it is a family geostatistical methods, where weights depend on the spatial correlation between the datapoints, described by the semivariogram. The method used for this contribution is the ordinary Kriging (OK), assuming an unknown, but constant mean.
- Reefmaster: a commercial GIS software dedicated for Lowrance fish finders. Being easy to use enables raster creation with TIN interpolation with Gaussian smoothing and enables the correction of the distance between the GPS antenna and the position of the echo sounder. The smoothing option can be minimized, but not turned off, therefore the peak values are lost. It enables the export of data points [28];
- SonarViewer: free software which enables reading the .slg and .sl2 files from the HDS7 echo sounder and data export for further processing;
- ArcGIS/QGIS: these programs were used for the creation of rasters (DBM).
3. Results
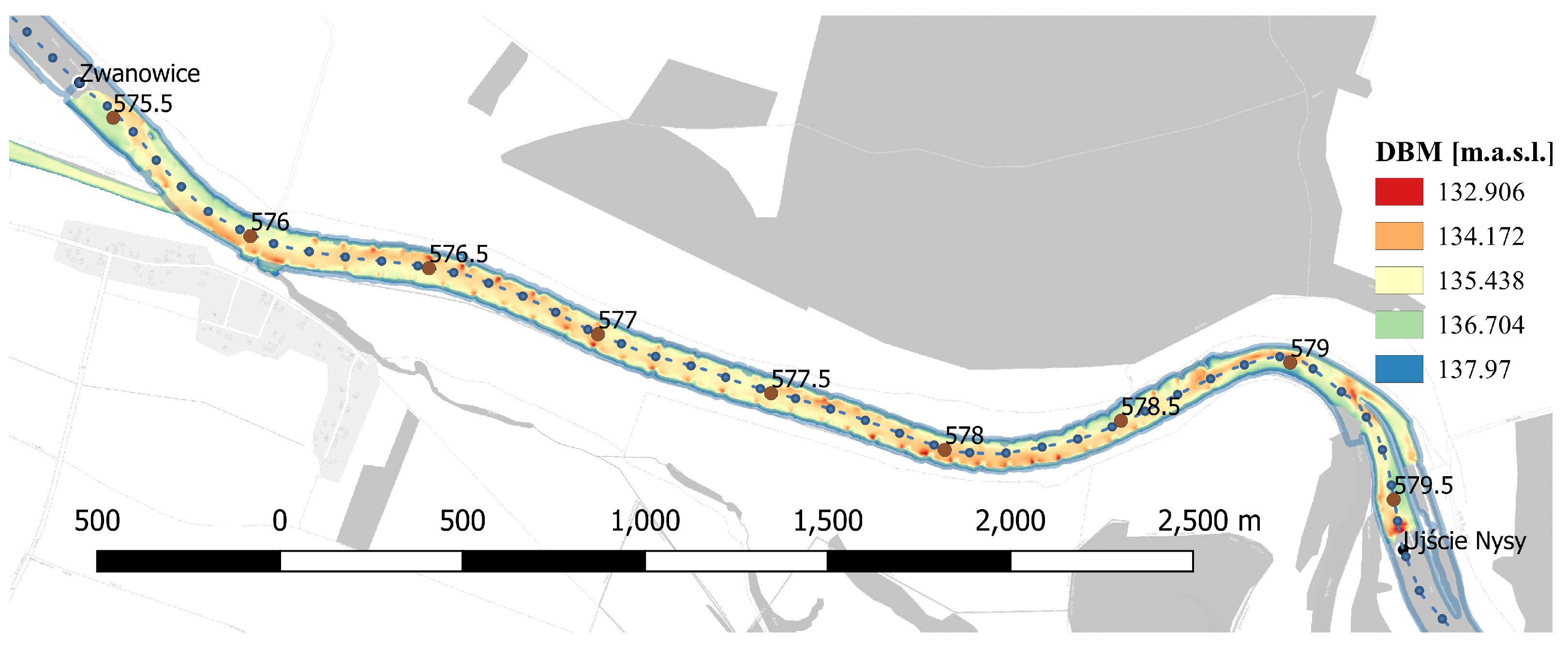
3.1. River Bed Mapping
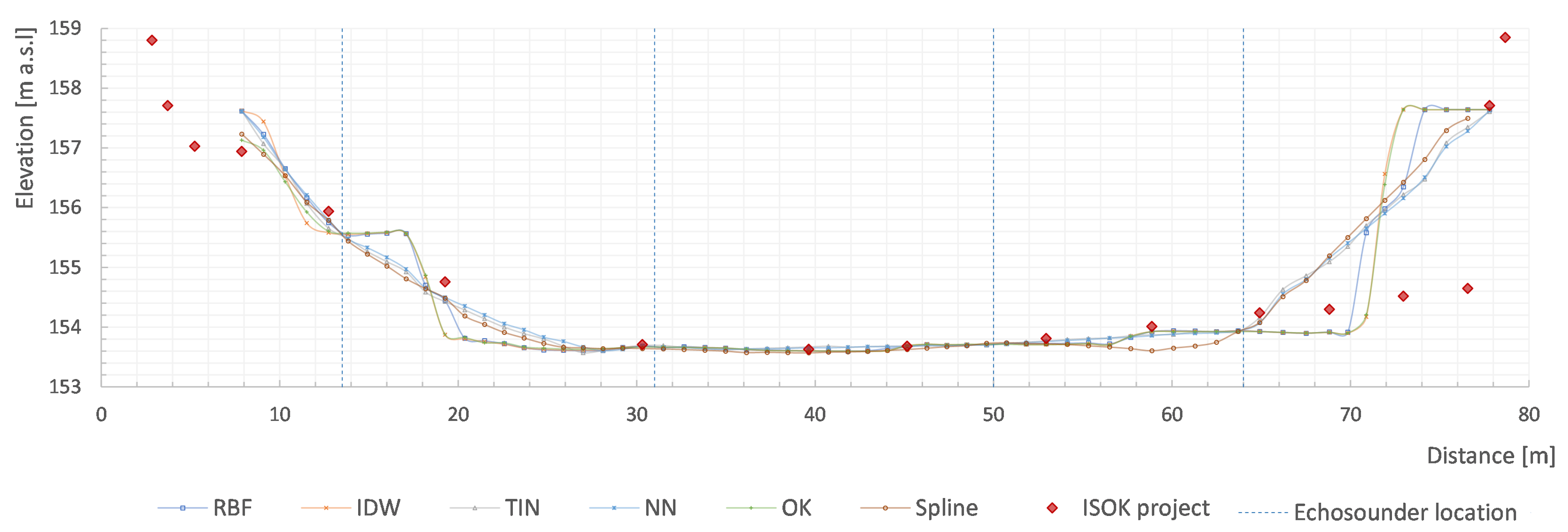
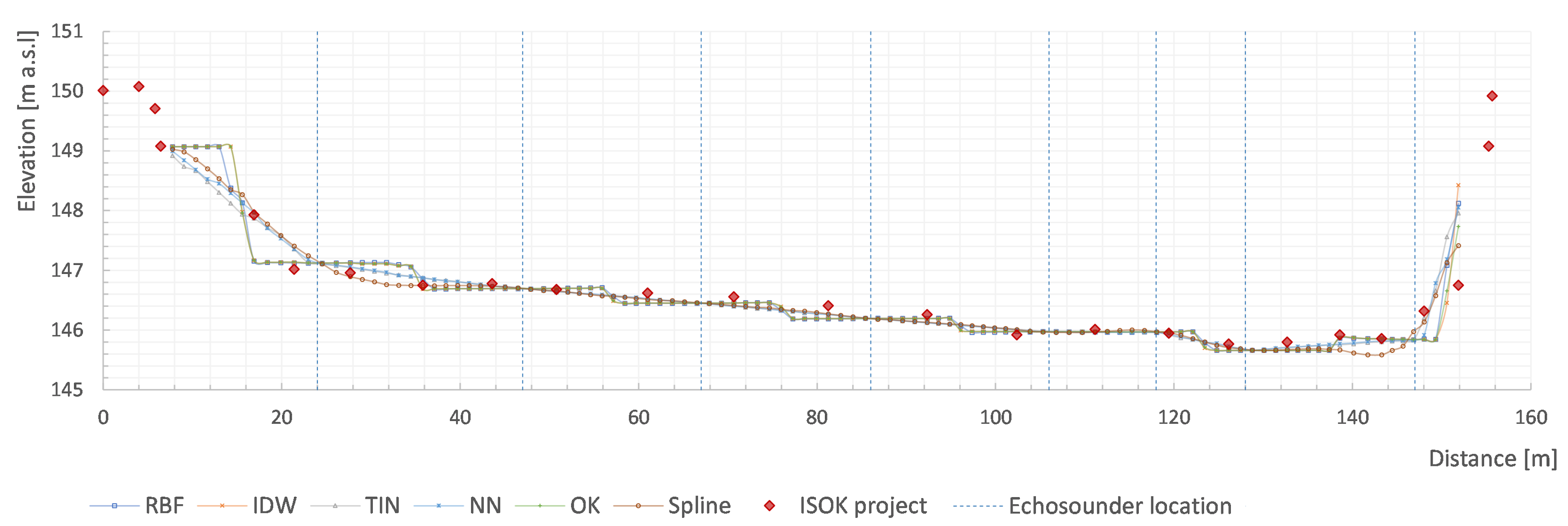
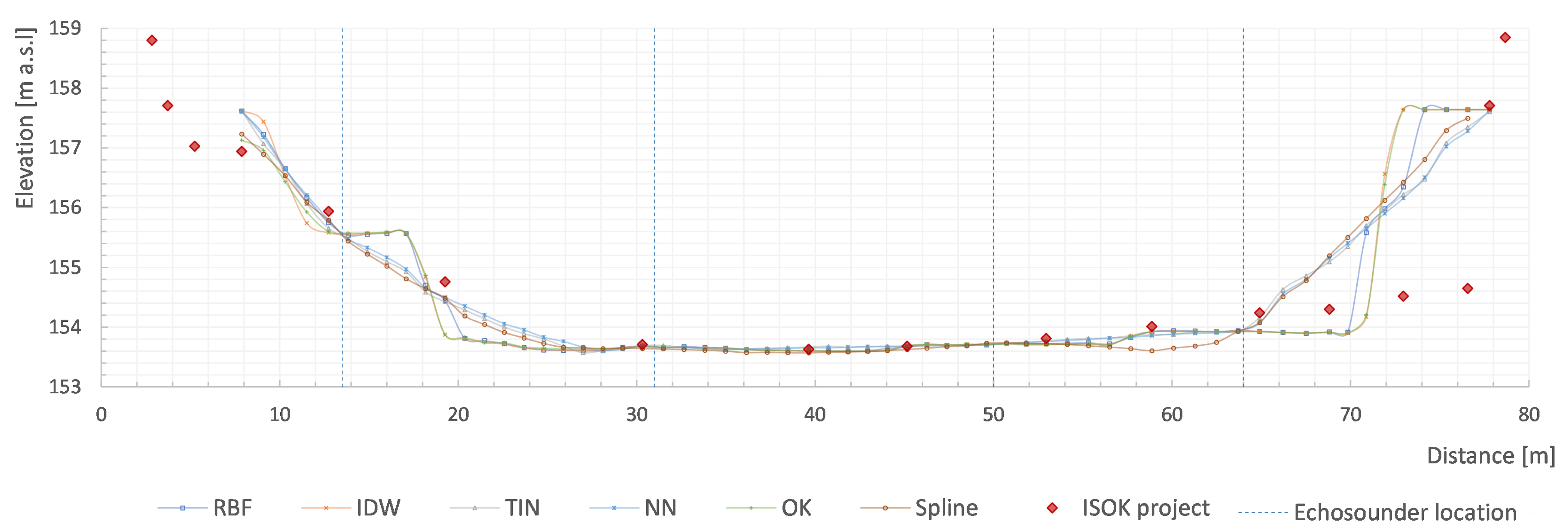
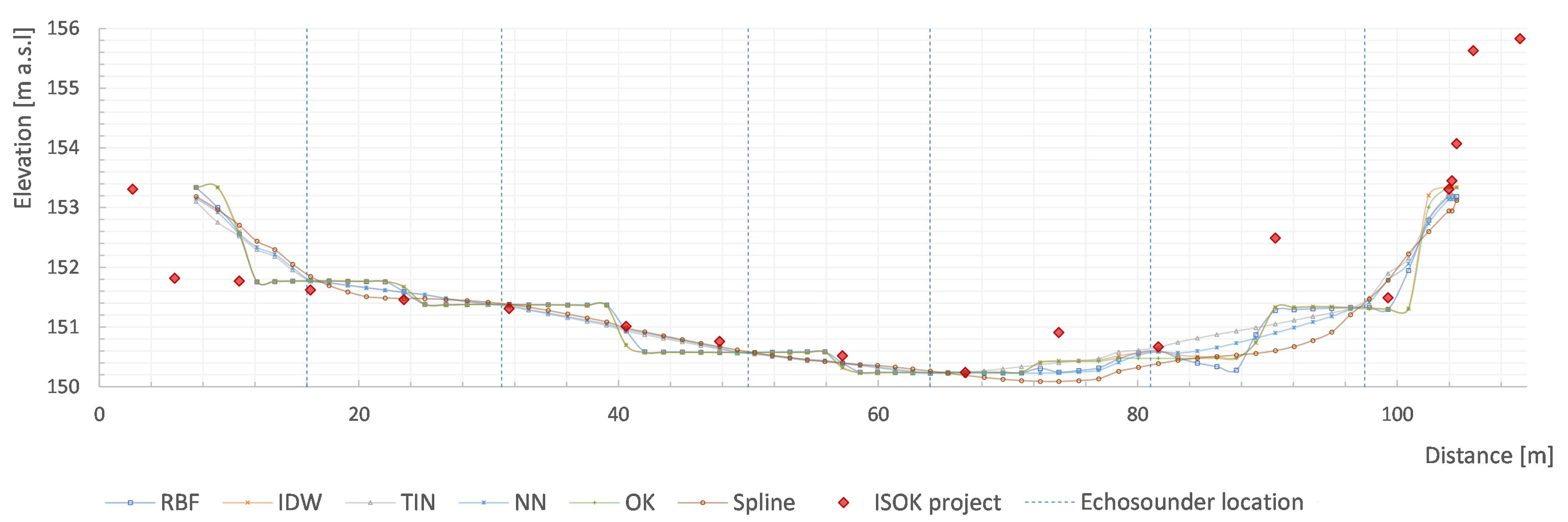
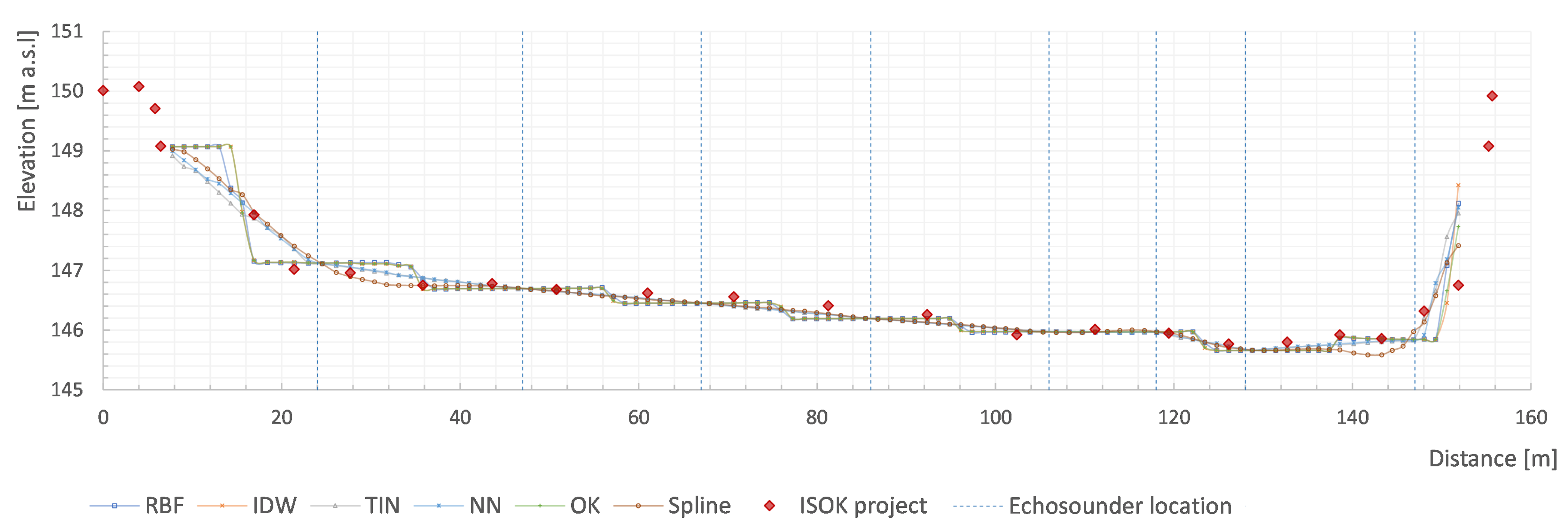
3.2. Comparison of Cross Section Data
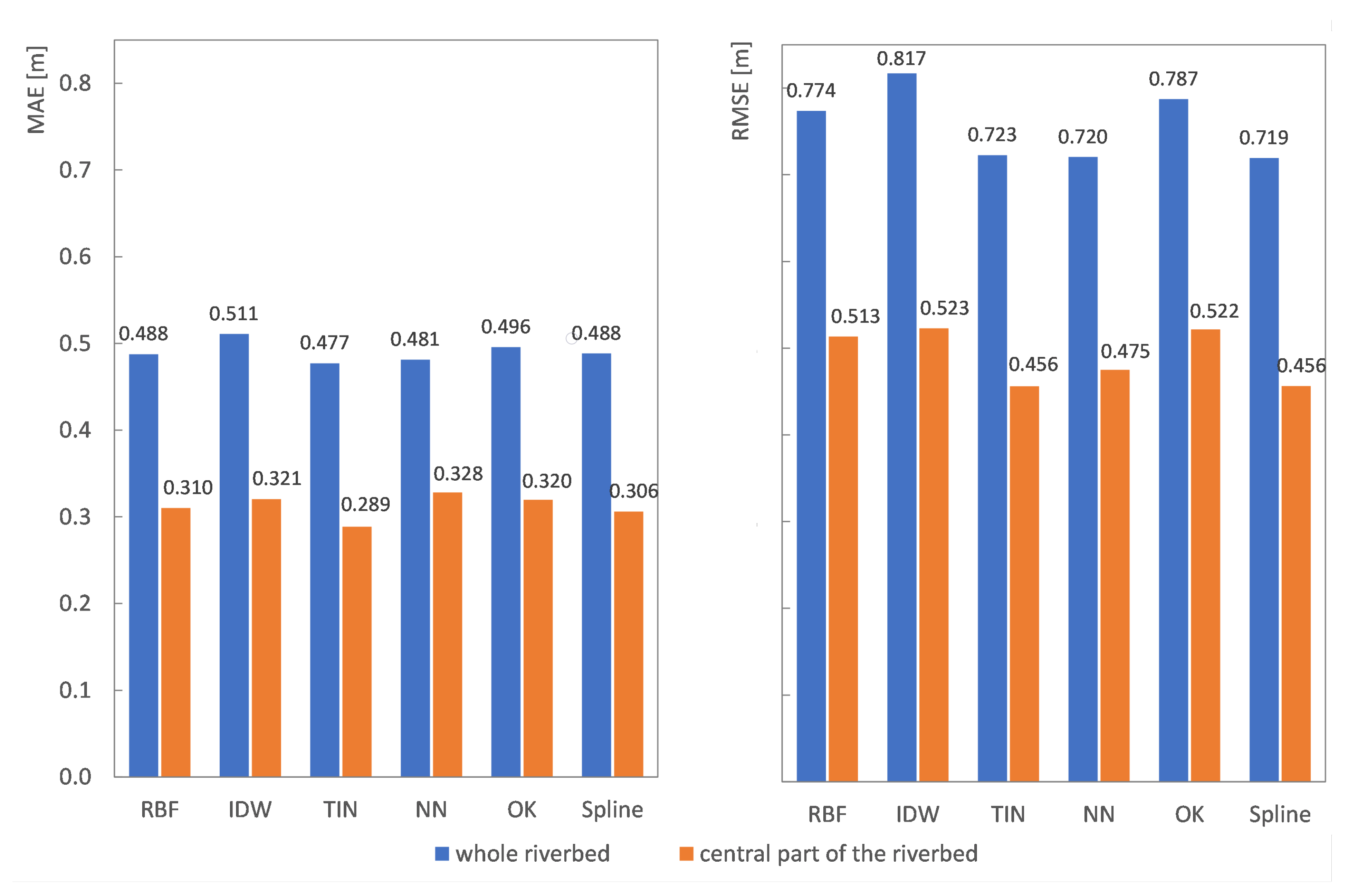
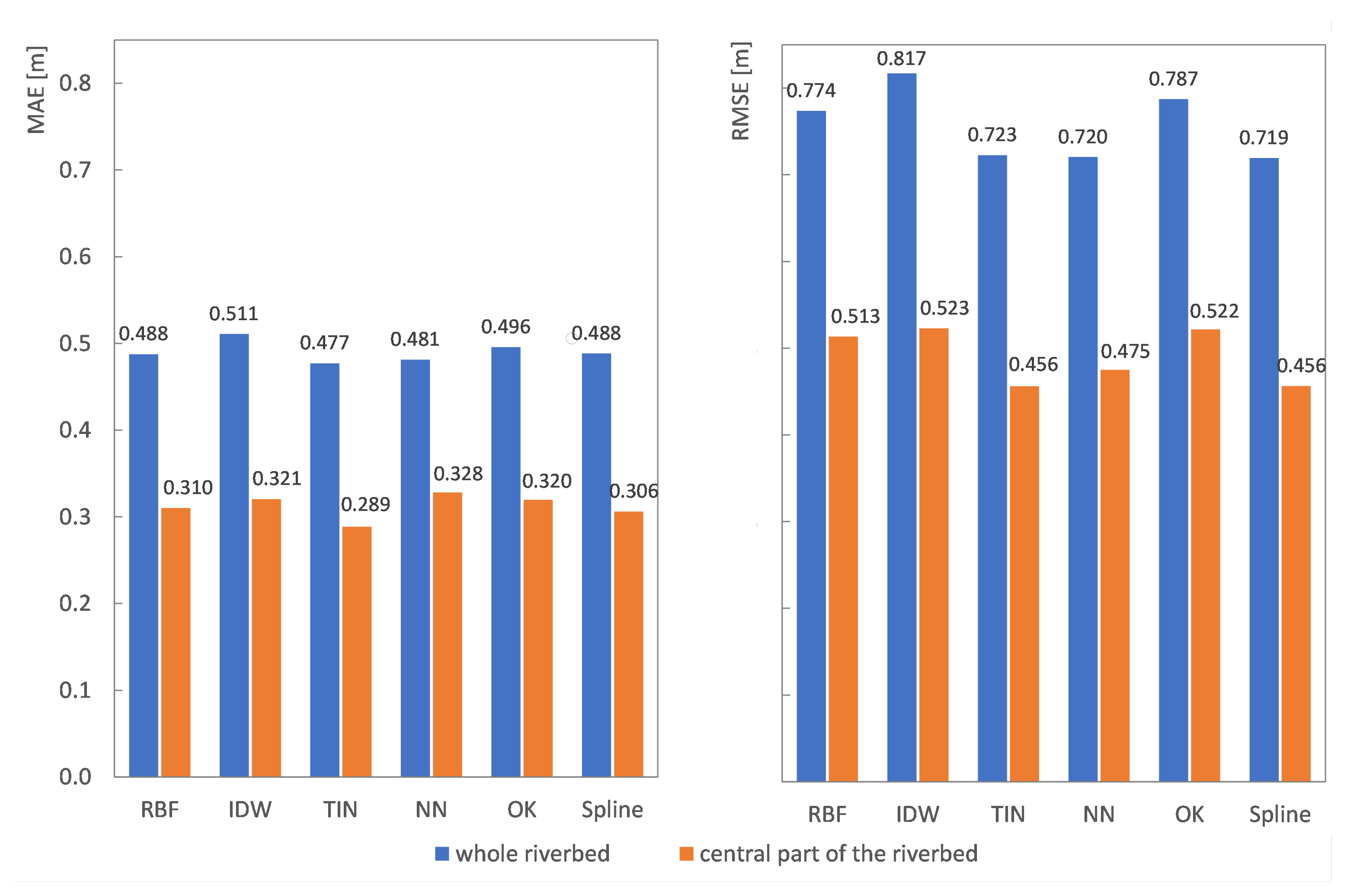
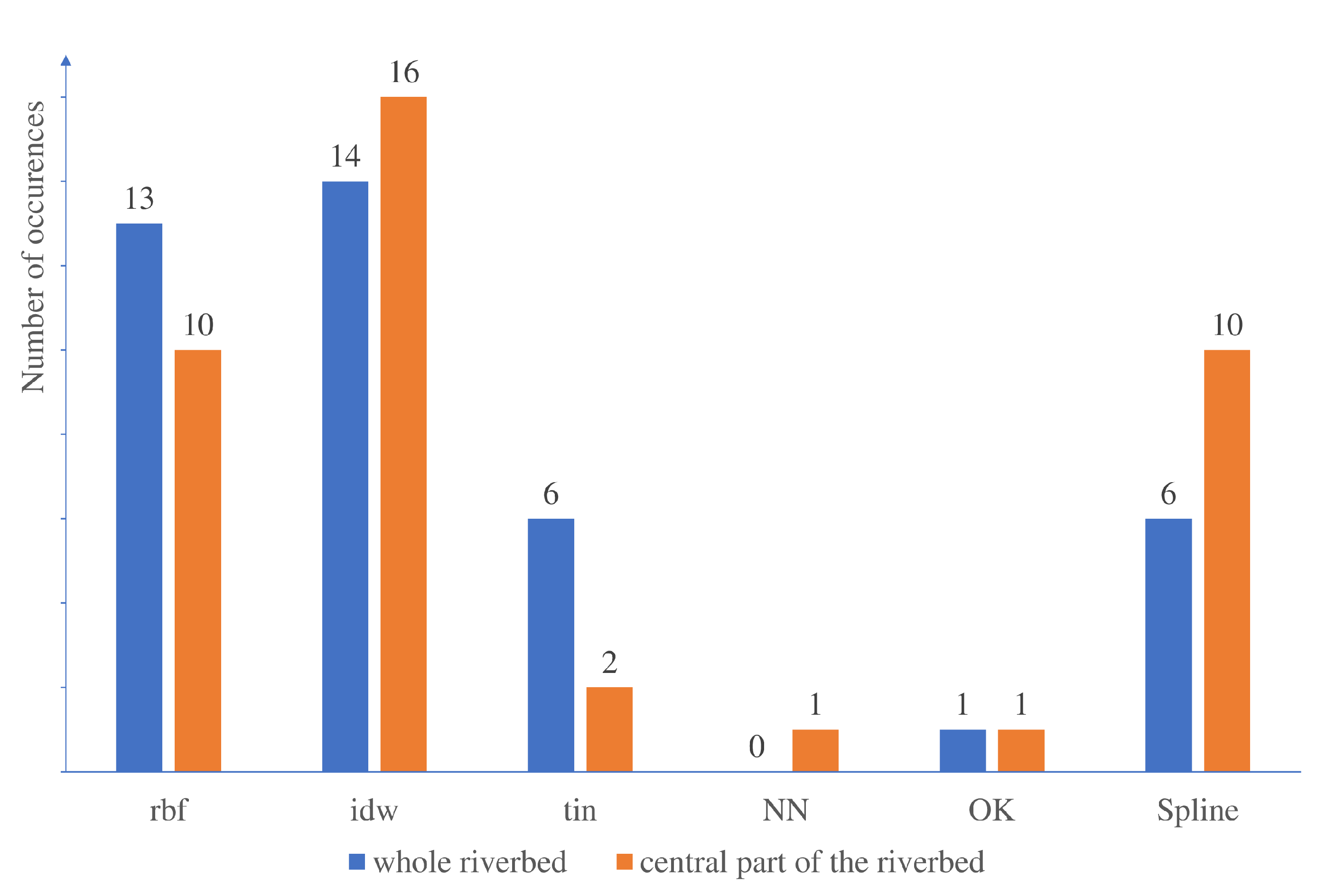
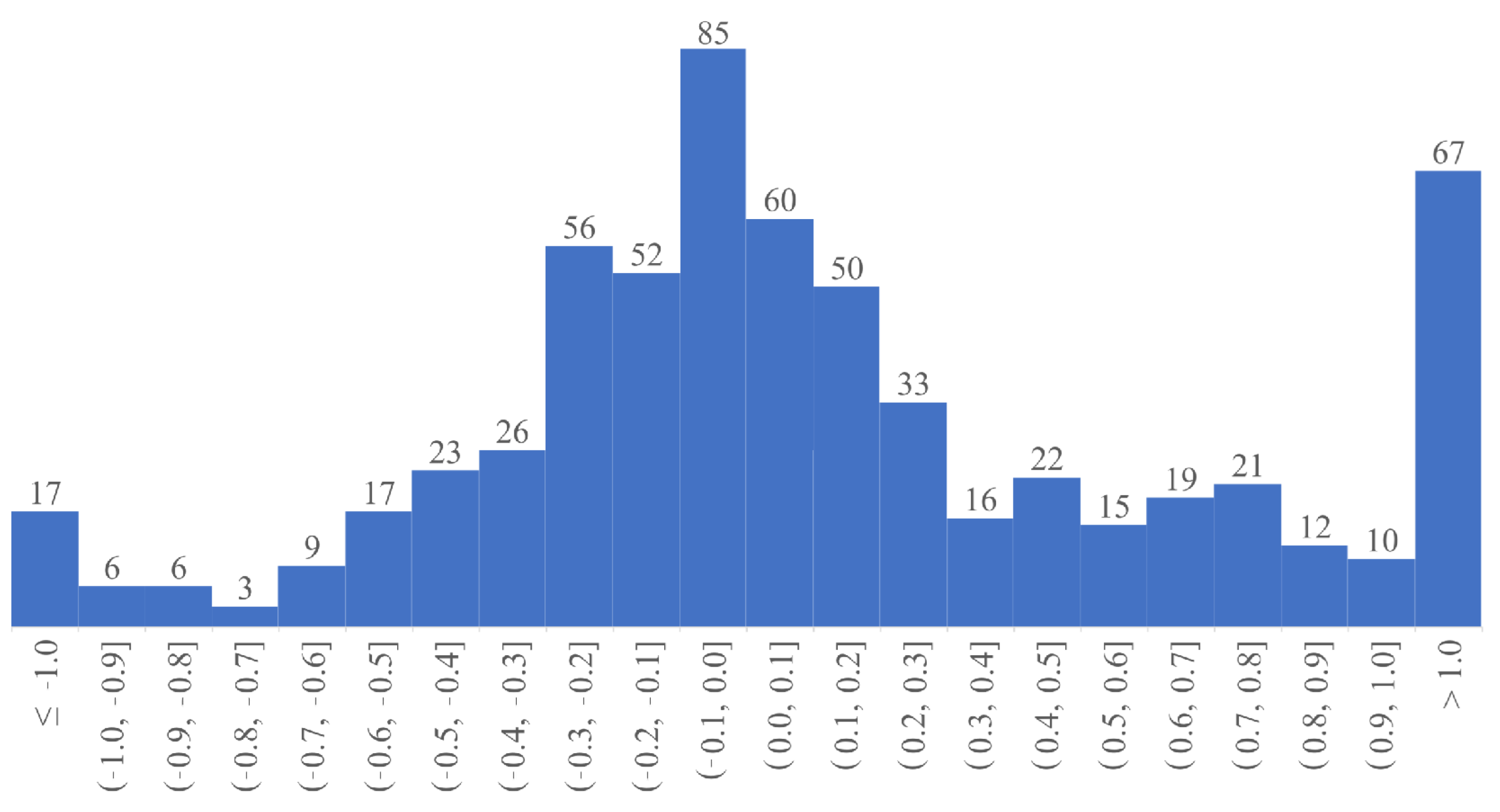
3.3. Analysis of Statistical Errors
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RBM | River Bed Mapping |
| GNSS | Global Navigation Satellite System |
| ISOK | Informatyczny System Osłony Kraju (in Polish) |
| Information System of Country Protection Against Extraordinary Hazards | |
| MAE | Mean Absolute Error |
| RMSE | Root Mean Square Error |
| TIN | Triangular Irregular Network |
| NN | Natural Neighbor |
| GIS | Geographic Information Systems |
| DiBM | Digital Bathymetric Modeling |
| LIDAR | Light Detection and Ranging |
| GNSS | Global Navigation Satellite System |
| NMEA | National Marine Electronics Association |
| GNSS | Global Navigation Satellite System |
| DbM | Data Base Management |
| DEM | Digital Elevation Model |
| RBF | Radial Basis Function |
| OK | Ordinary Kriging |
| IDW | Inverse distance weighted |
| GPS | Global Positioning System |
| EBK | Empirical Bayesian Kriging |
| RTK | Real Time Kinematic |
| ME | Mean Error |
References
- Kostecki, S.; Machajski, J.; Herrera-Granados, O.; Uciechowska-Grakowicz, A.K.; Maniecki, Ł.; Sawicki, E. Project on the Enhancement of the Navigability of the Odra River. Reports and Recomendations. Part 1A; Tech. Reports of the Faculty of Civil Engineering; Wrocław University of Science and Technology: Wrocław, Poland, 2019. (In Polish) [Google Scholar]
- Yamasaki, S.; Tabusa, T.; Iwasaki, S.; Hiramatsu, M. Acoustic water bottom investigation with a remotely operated watercraft survey system. Prog. Earth Planet. Sci. 2017, 4, 25. [Google Scholar] [CrossRef] [Green Version]
- Bio, A.; Gonçalves, J.A.; Magalhães, A.; Pinheiro, J.; Bastos, L. Combining Low-Cost Sonar and High-Precision Global Navigation Satellite System for Shallow Water Bathymetry. Estuaries Coasts 2020. [Google Scholar] [CrossRef]
- Okabe, T.; Kato, S. Temporal changes in the ebb-tidal delta bathymetry of Imagire-guchi inlet in Japan. Coast. Eng. J. 2018, 60, 437–448. [Google Scholar] [CrossRef]
- Molenda, T.; Czajka, A.; Czaja, S.; Spyt, B. Rapid River Bed Recovery after the In-Channel Mining: The Case of Vistula River, Poland. Water 2021, 13, 623. [Google Scholar] [CrossRef]
- Pacina, J.; Lend’Áková, Z.; Štojdl, J.; Grygar, T.M.; Dolejš, M. Dynamics of sediments in reservoir inflows: A case study of the skalka and nechranice reservoirs, Czech Republic. ISPRS Int. J. Geo-Inf. 2020, 9, 258. [Google Scholar] [CrossRef] [Green Version]
- Dumpis, J.; Lagzdiņš, A. Methodology for Bathymetric Mapping Using Open-Source Software. Environ. Clim. Technol. 2020, 24, 239–248. [Google Scholar] [CrossRef]
- Halmai, Á; Gradwohl-Valkay, A.; Czigány, S.; Ficsor, J.; Liptay, Z.Á; Kiss, K.; Pirkhoffer, E. Applicability of a recreational-grade interferometric sonar for the bathymetric survey and monitoring of the Drava River. ISPRS Int. J. Geo-Inf. 2020, 9, 149. [Google Scholar] [CrossRef] [Green Version]
- Madusiok, D. A bathymetric unmanned surface vessel for effective monitoring of underwater aggregate extraction from the perspective of engineering facilities protection. Arch. Min. Sci. 2019, 64, 375–384. [Google Scholar] [CrossRef]
- Osadczuk, A. Geofizyczne metody badań osadów dennych. Stud. Limnol. Telmatologica 2007, 1, 25–32. [Google Scholar]
- Gołuch, P.; Kaplon, J.; Dombek, A. Evaluation of data accuracy obtained from batymetric measurement using the fishfinder LOWRANCE LMS-527C DF iGPS. Arch. Fotogram. Kartogr. Teledetekcji 2010, 21, 109–118. (In Polish) [Google Scholar]
- Milne, J.A.; Sear, D.A. Modelling river channel topography using GIS. Int. J. GIS 1997, 11, 499–519. [Google Scholar] [CrossRef]
- Song, Y.; Huang, J.; Toorman, E.; Yang, G. Reconstruction of river topography for 3d hydrodynamic modelling using surveyed cross-sections: An improved algorithm. Water 2020, 12, 3539. [Google Scholar] [CrossRef]
- Dysarz, T. Development of RiverBox-An ArcGIS toolbox for river bathymetry reconstruction. Water 2018, 10, 1266. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.Y.; Mossa, J.; Mao, L.; Almulla, M. Comparison of different spatial interpolation methods for historical hydrographic data of the lowermost Mississippi River. Ann. GIS 2019, 25, 133–151. [Google Scholar] [CrossRef]
- Kruger, R.; Karrash, P.; Bernard, L. Evaluating Spatial Data Acquisition and Interpolation Strategies for River Bathymetries. In Geospatial Technologies for All; Springer: Cham, Switzerland, 2018; pp. 189–209. [Google Scholar] [CrossRef]
- Glenn, J.; Tonina, D.; Morehead, M.D.; Fiedler, F.; Benjankar, R. Effect of transect location, transect spacing and interpolation methods on river bathymetry accuracy. Earth Surf. Process. Landforms 2016, 41, 1185–1198. [Google Scholar] [CrossRef]
- Heritage, G.L.; Milan, D.J.; Large, A.R.G.; Fuller, I.C. Influence of survey strategy and interpolation model on DEM quality. Geomorphology 2009, 112, 334–344. [Google Scholar] [CrossRef]
- Šiljeg, A.; Cavric, B.; Marić, I.; Barada, B. GIS modelling of bathymetric data in the construction of port terminals—An example of Vlaška channel in the Port of Ploče, Croatia. Int. J. Eng. Model. 2019, 32, 17–31. [Google Scholar]
- Genchi, S.A.; Vitale, A.J.; Perillo, G.M.E.; Seitz, C.; Delrieux, C.A. Mapping Topobathymetry in a Shallow Tidal Environment Using Low-Cost Technology. Remote Sens. 2020, 12, 1394. [Google Scholar] [CrossRef]
- Ferreira, I.O.; Rodrigues, D.D.; dos Santos, G.R.; Rosa, L.M.F. Em superficies batimétricas: IDW ou krigagem? Bol. Cienc. Geod. 2017, 23, 493–508. [Google Scholar] [CrossRef] [Green Version]
- Arseni, M.; Voiculescu, M.; Georgescu, L.P.; Iticescu, C.; Rosu, A. Testing Different Interpolation Methods Based on Single Beam Echosounder River Surveying. Case Study: Siret River. ISPRS Int. J. Geo-Inf. 2019, 8, 507. [Google Scholar] [CrossRef] [Green Version]
- Herrera-Granados, O. Numerical analysis of filling/emptying operation proposals for ship-locks chambers used for inland navigation. In River-Flow 2020, Proceedings of the of the 10th Conference on Fluvial Hydraulics, Delft, The Netherlands, 7–10 July 2020; Uijttewaal, W., Franca, M.J., Valero, D., Chavarrias, V., Arbós, C.Y., Schielen, R., Crosato, A., Eds.; CRC Press/Balkema: Delft, The Netherlands, 2020; pp. 2350–2357. [Google Scholar]
- Dybkowska-Stefek, D. Methodology to estimate the minimum and maximum water level for inland navigation after the modernization of the Odra waterway. Biuro OdrzańSkiej Drog. Wodnej 2018. [Google Scholar]
- Dimitriadis, P.; Tegos, A.; Oikonomou, A.; Pagana, V.; Koukouvinos, A.; Mamassis, N.; Koutsoyiannis, D.; Efstratiadis, A. Comparative evaluation of 1D and quasi-2D hydraulic models based on benchmark and real-world applications for uncertainty assessment in flood mapping. J. Hydrol. 2016, 534, 478–492. [Google Scholar] [CrossRef]
- Uciechowska-Grakowicz, A.K.; Herrera-Granados, O. Usage of geostatistical interpolation methods for riverbed mapping and digital bathymetric modelling. In 6th IAHR Europe Congress. Book of Abstracts; Kalinowska, M., Rowiński, P., Okruszko, T., Nines, M., Eds.; PAS Publications: Warsaw, Poland, 2020. [Google Scholar]
- Paramasivam, C.R.; Venkatramanan, S. An introduction to various spatial analysis techniques. GIS Geostat. Tech. Groundw. Sci. 2019, 20–30. [Google Scholar] [CrossRef]
- Reefmaster. Reference Manual V2.0. 2017. Available online: https://reefmaster.com.au/reference2/index.htm (accessed on 1 December 2018).
- Ferdowsi, B.; Ortiz, C.P.; Houssais, M.; Jerolmack, D.J. River-bed armouring as a granular segregation phenomenon. Nat. Commun. 2017, 8, 1363. [Google Scholar] [CrossRef] [PubMed]
- Santillan, J.R.; Serviano, R.; Makinano-Santillan, J.L.; Marqueso, M. Influence of river bed elevation survey configurations and interpolation methods on the accuracy of lidar dtm-based river flow simulations. ISPRS Arch. 2016, 42, 225–235. [Google Scholar] [CrossRef] [Green Version]
- Kostecki, S.; Machajski, J.; Banasiak, R.; Herrera-Granados, O.; Uciechowska-Grakowicz, A.K.; Maniecki, Ł; Sawicki, E. Project on the Enhancement of the Navigability of the Odra River. Reports and Recomendations. Part C; Tech. Reports of the Faculty of Civil Engineering; Wrocław University of Science and Technology: Wrocław, Poland, 2019. (In Polish) [Google Scholar]
- Hagemen, J.; Bennett, D.A. Construction of Digital Elevation Models for Archaeological Applications. In Practical Applications of GIS for Archaeologists; Westcott, K.L., Brandon, R.J., Eds.; Taylor & Francis: Abingdon, UK, 2000. [Google Scholar]
- Horta, J.; Pacheco, A.; Moura, D.; Ferreira, Ó. Can recreational echosounder-chartplotter systems be used to perform accurate nearshore bathymetric surveys? Ocean Dyn. 2014, 64, 1555–1567. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| dim | RBF | IDW | TIN | NN | OK | Spline | |
|---|---|---|---|---|---|---|---|
| Whole Cross-Section | |||||||
| RMSE | [m] | 0.774 | 0.817 | 0.723 | 0.720 | 0.787 | 0.719 |
| MAE | [m] | 0.488 | 0.511 | 0.477 | 0.481 | 0.496 | 0.488 |
| ME | [m] | 0.173 | 0.187 | 0.160 | 0.165 | 0.170 | 0.126 |
| Median | [m] | 0.012 | 0.031 | 0.039 | 0.049 | 0.030 | −0.006 |
| #Max | [-] | 13 | 14 | 6 | 0 | 1 | 6 |
| Central Part of Riverbed | |||||||
| RMSE | [m] | 0.513 | 0.523 | 0.456 | 0.475 | 0.522 | 0.456 |
| MAE | [m] | 0.310 | 0.321 | 0.289 | 0.328 | 0.320 | 0.306 |
| ME | [m] | 0.041 | 0.047 | 0.043 | 0.041 | 0.045 | -0.022 |
| Median | [m] | −0.027 | −0.026 | −0.029 | −0.028 | −0.027 | −0.076 |
| #Max | [-] | 10 | 16 | 2 | 1 | 1 | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uciechowska-Grakowicz, A.; Herrera-Granados, O. Riverbed Mapping with the Usage of Deterministic and Geo-Statistical Interpolation Methods: The Odra River Case Study. Remote Sens. 2021, 13, 4236. https://doi.org/10.3390/rs13214236
Uciechowska-Grakowicz A, Herrera-Granados O. Riverbed Mapping with the Usage of Deterministic and Geo-Statistical Interpolation Methods: The Odra River Case Study. Remote Sensing. 2021; 13(21):4236. https://doi.org/10.3390/rs13214236
Chicago/Turabian StyleUciechowska-Grakowicz, Anna, and Oscar Herrera-Granados. 2021. "Riverbed Mapping with the Usage of Deterministic and Geo-Statistical Interpolation Methods: The Odra River Case Study" Remote Sensing 13, no. 21: 4236. https://doi.org/10.3390/rs13214236
APA StyleUciechowska-Grakowicz, A., & Herrera-Granados, O. (2021). Riverbed Mapping with the Usage of Deterministic and Geo-Statistical Interpolation Methods: The Odra River Case Study. Remote Sensing, 13(21), 4236. https://doi.org/10.3390/rs13214236