
Hexagonal Grid-Based Framework for Mobile Robot Navigation


Abstract
:1. Introduction
2. Related Work
- The robot observes the environment using sensors;
- Noise is removed;
- The robot determines its pose, and the map is updated;
- A collision-free path is planned.
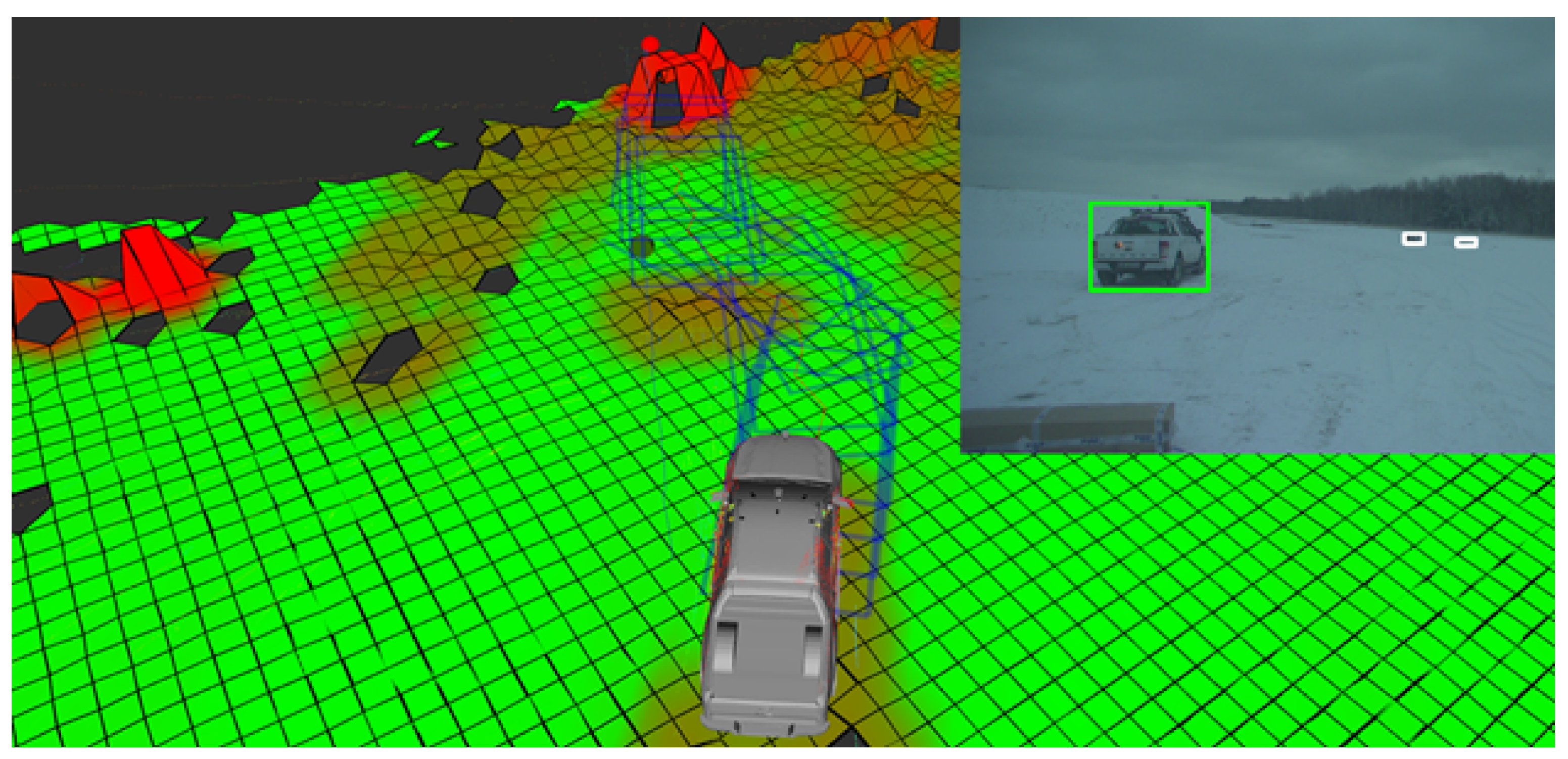
3. Mapping
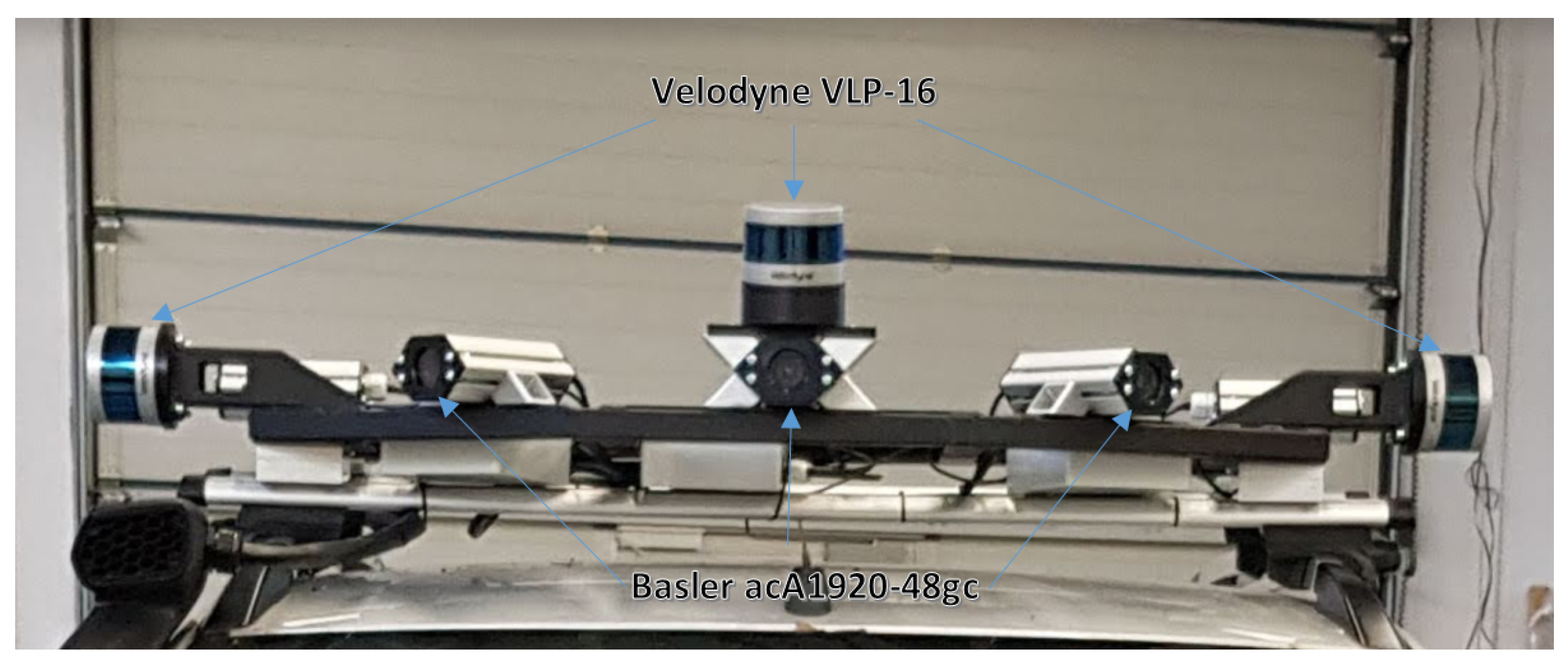
3.1. Sensors
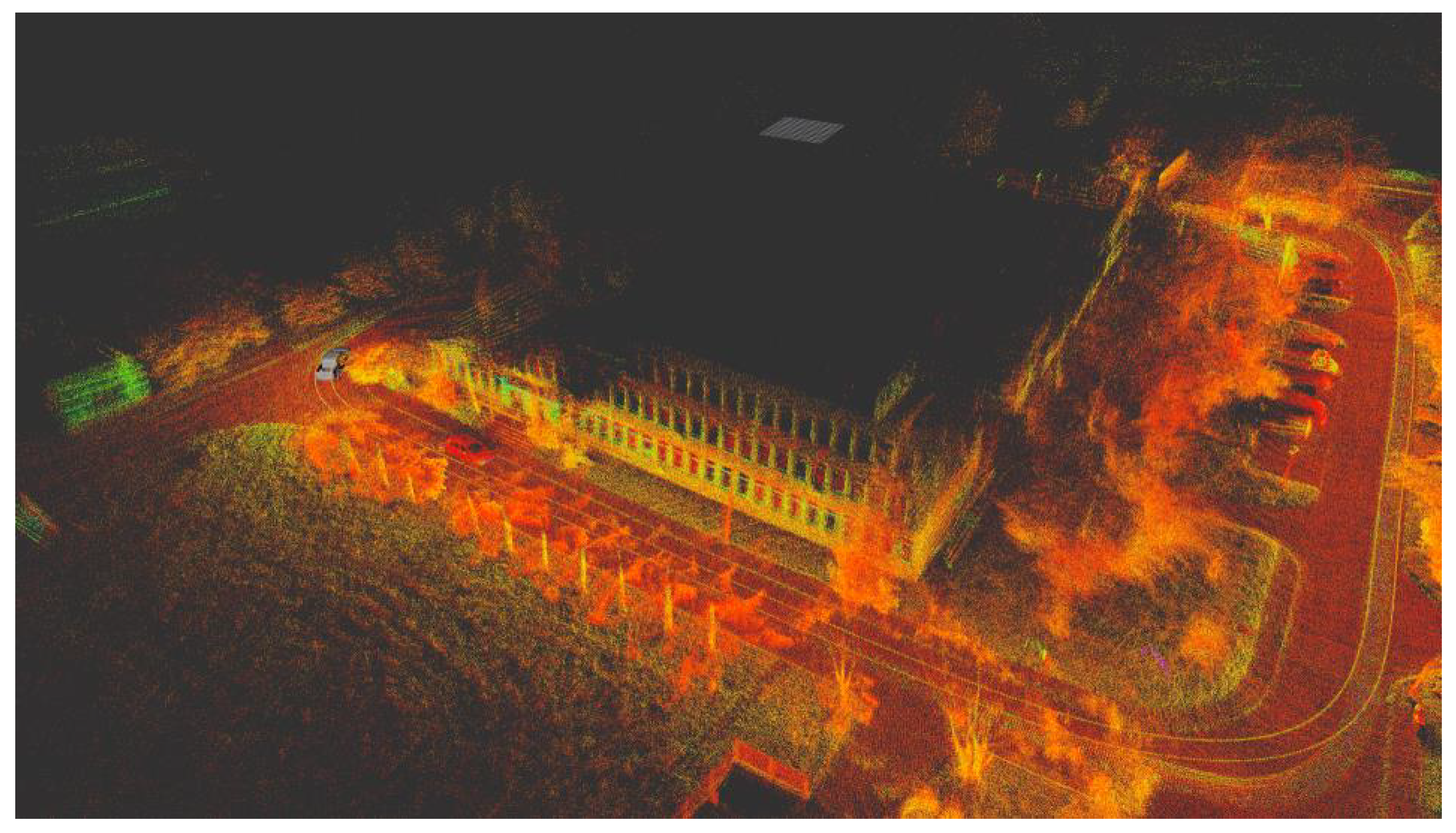
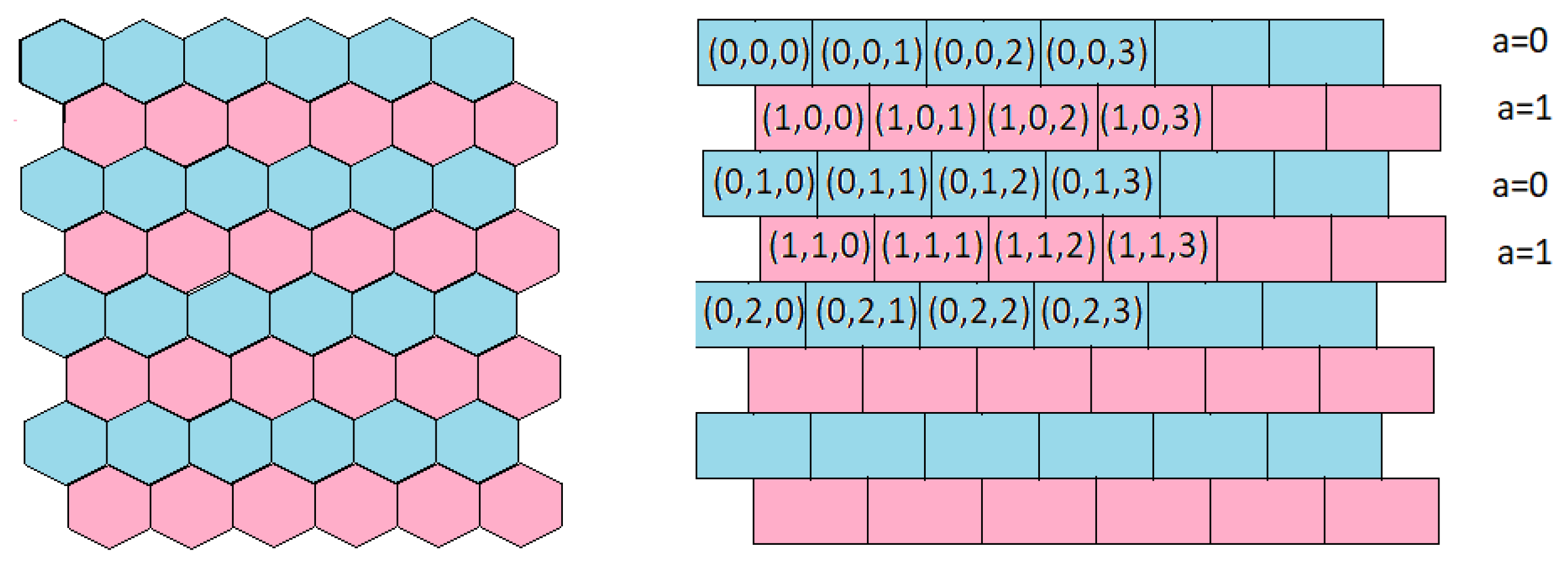
3.2. Map Building
| Algorithm 1 Discretization of hexagonal coordinates. |
|


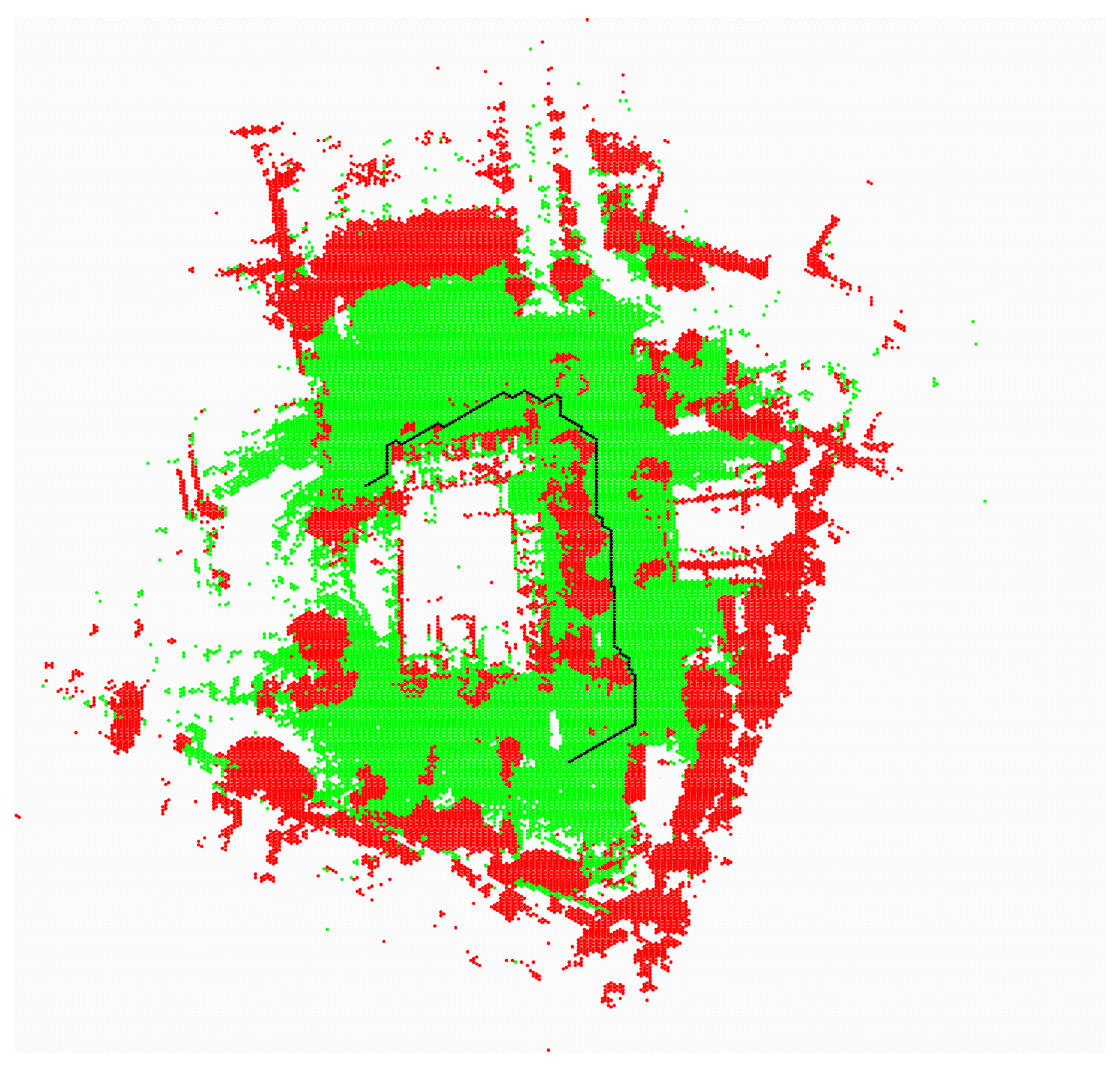
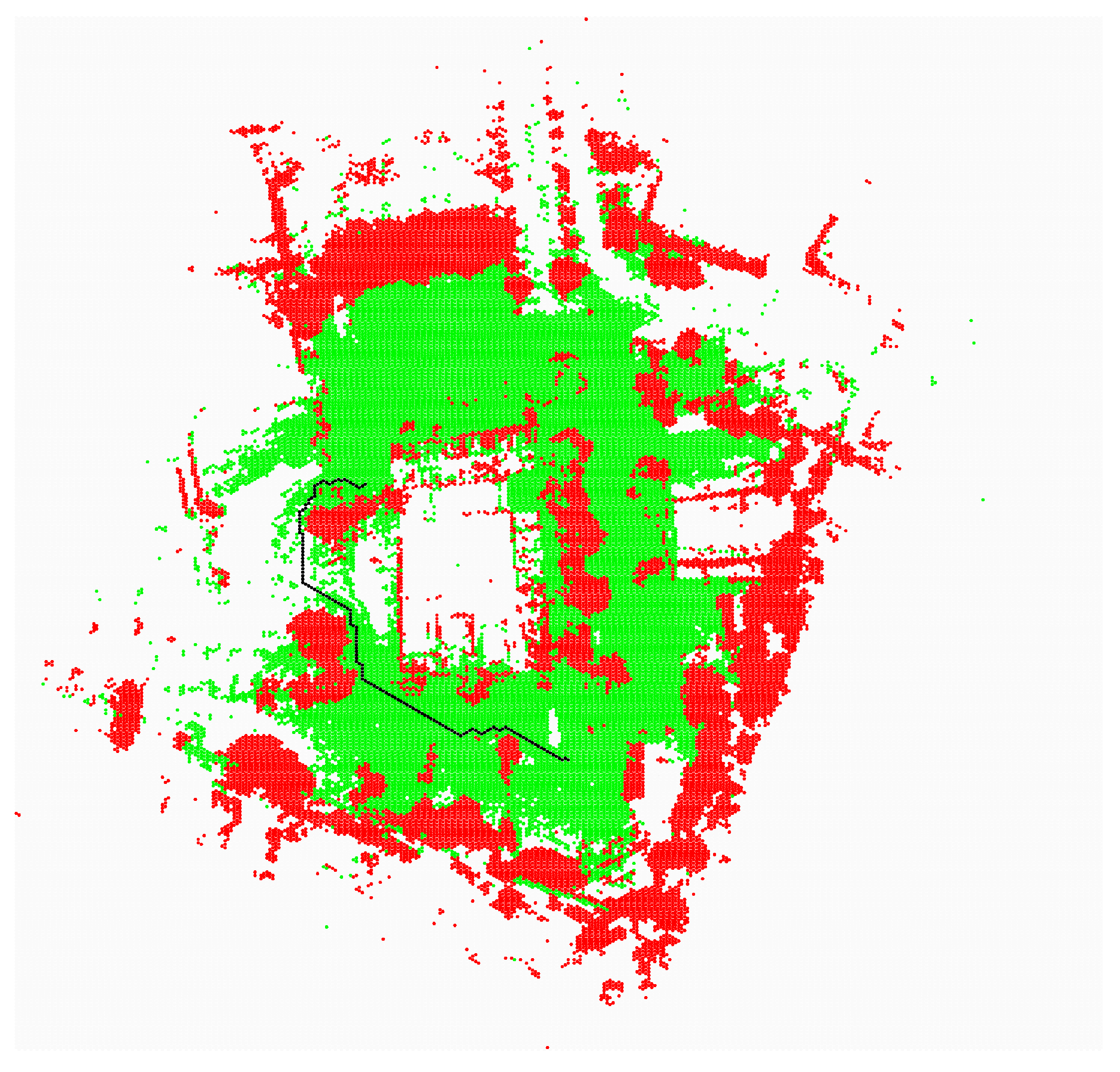
4. Path Planning
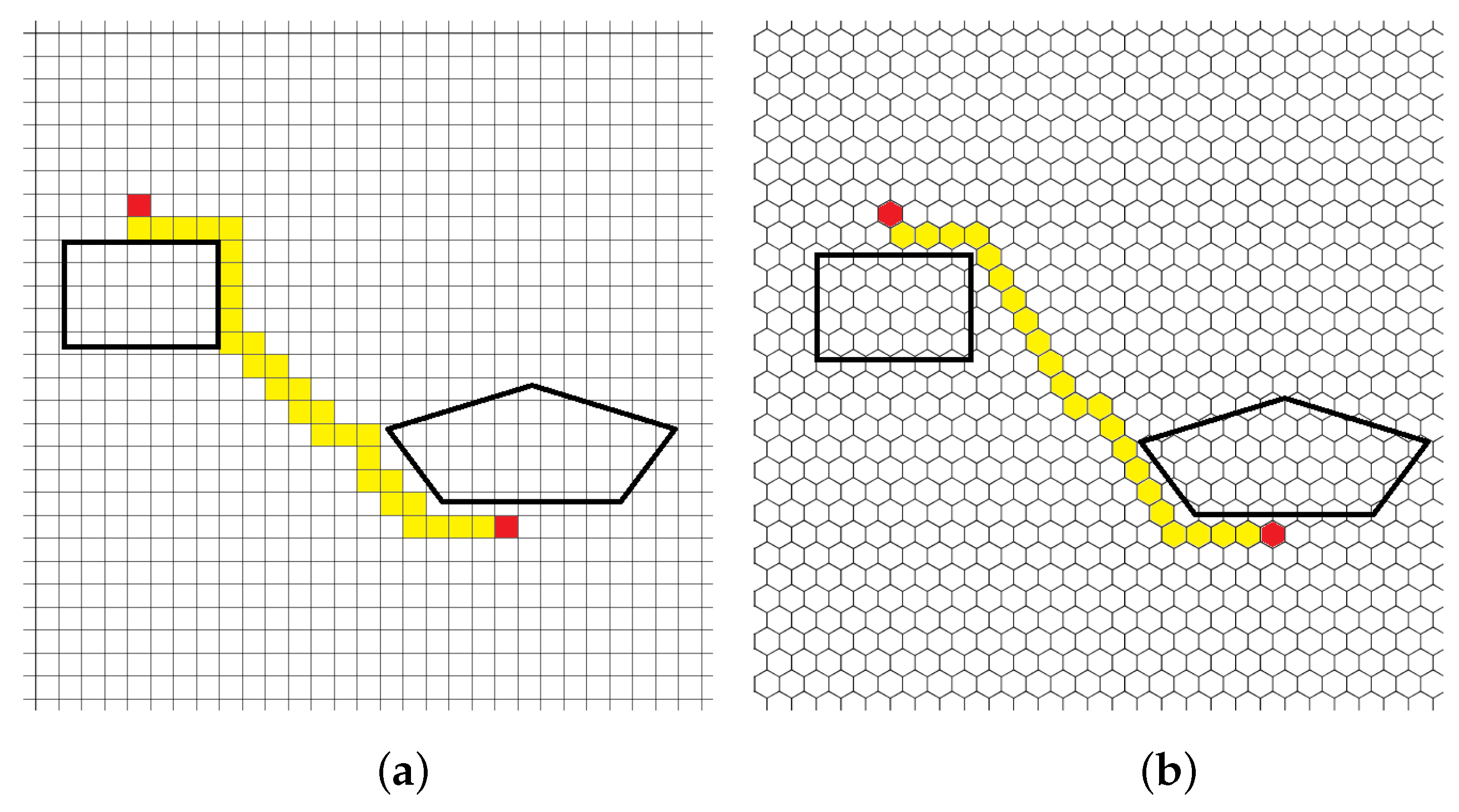
- The situation in which the position of the robot or the target is surrounded by obstacles is easily detected;
- By specifying the values of the function, we can influence the properties of the path—e.g., the distance from obstacles or the type of surface can be taken into account;
- A square cell has four neighbors, and a hexagonal cell has six adjacent cells;
- A path can be smoothed more easily than with a rectangular grid.
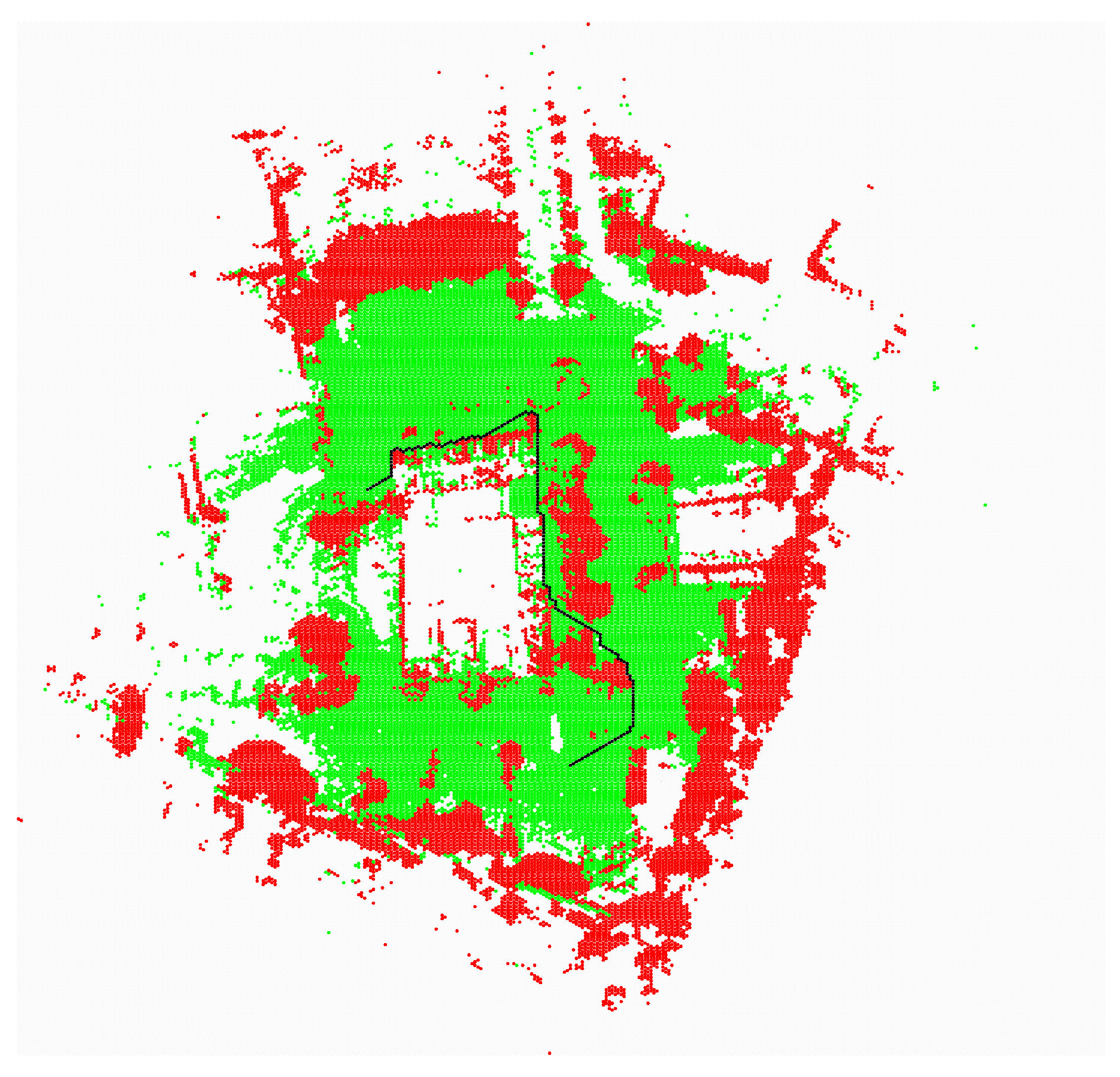
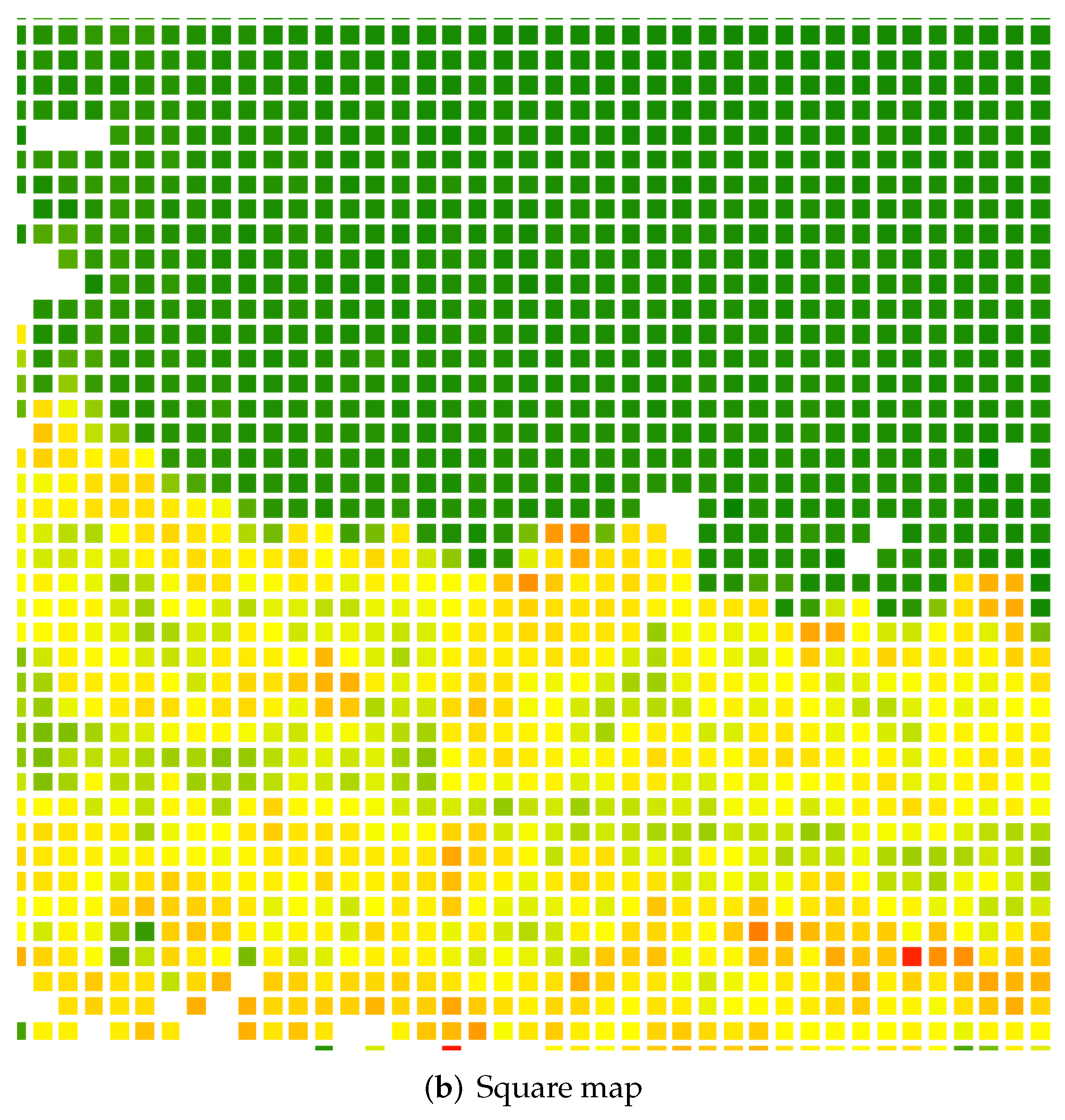
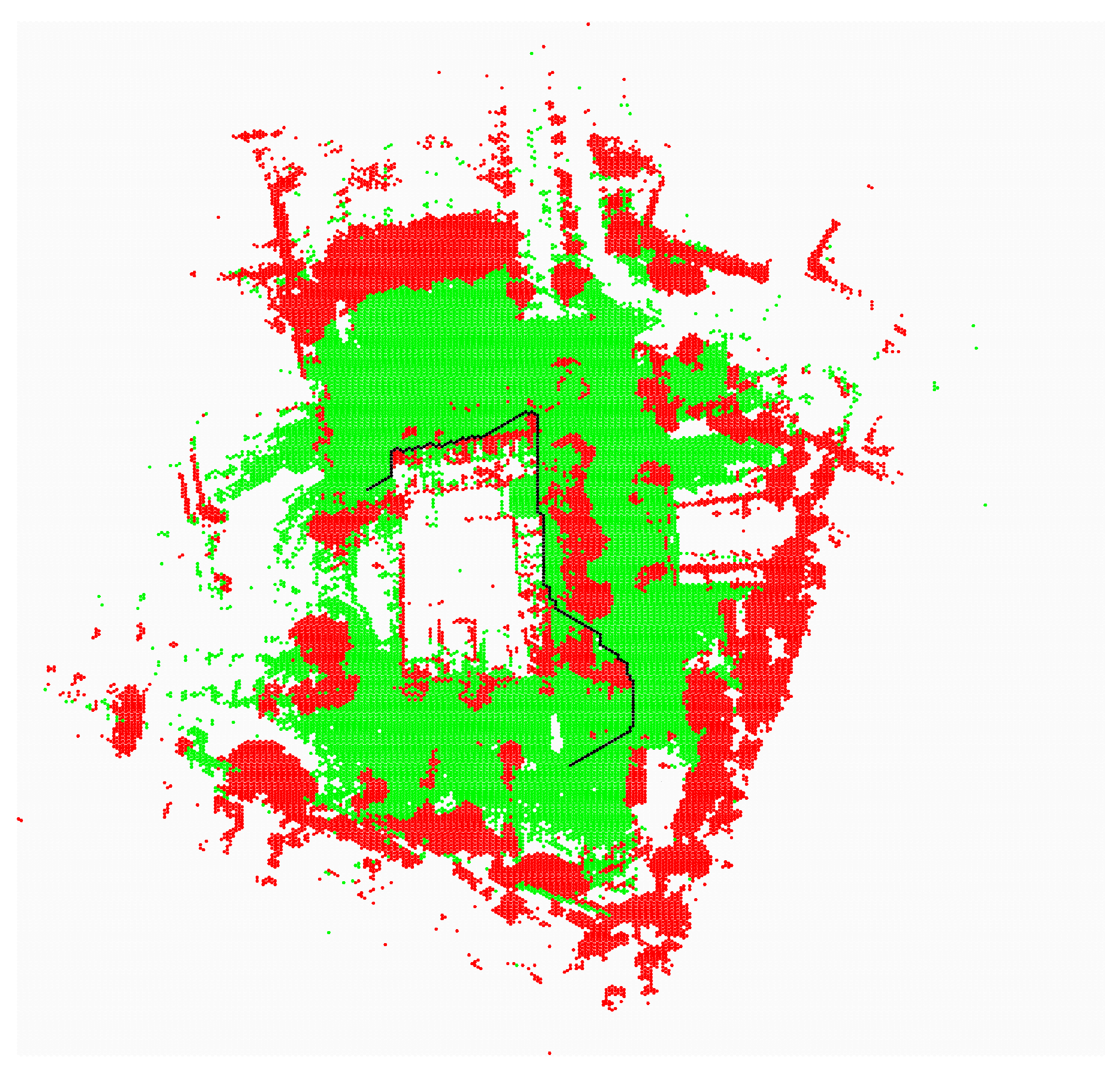
5. Experimental Results
6. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Duszak, P.; Siemiątkowska, B. The application of hexagonal grids in mobile robot Navigation. In Proceedings of the Conference Mechatronics, Recent Advances Towards Industry, Advances in Intelligent Systems and Computing, Kunming, China, 22–24 May 2020; Springer: Berlin/Heidelberg, Germany, 2020; Volume 1044, pp. 198–205, ISBN 978-3-030-29992-7. [Google Scholar] [CrossRef]
- Reinoso, O.; Payá, L. Special Issue on Mobile Robots Navigation. Appl. Sci. 2020, 10, 1317. [Google Scholar] [CrossRef] [Green Version]
- Siegwart, R.; Nourbakhsh, I.R. Introduction to Autonomous Mobile Robots; Bradford Company: Cambridge, MA, USA, 2004. [Google Scholar]
- Elfes, A. Using occupancy grids for mobile robot perception and navigation. Computer 1989, 22, 46–57. [Google Scholar] [CrossRef]
- Rodriguez-Losada, D.; Matia, F.; Galan, R. Building geometric feature based maps for indoor service robots. Robot. Auton. Syst. 2006, 54, 558. [Google Scholar] [CrossRef]
- Zhang, Y.; Tian, G.; Shao, X.; Cheng, J. Effective Safety Strategy for Mobile Robots Based on Laser-Visual Fusion in Home Environments. IEEE Trans. Syst. Man Cybern. Syst. 2021, 99, 1–13. [Google Scholar]
- Fankhauser, P.; Hutter, M. A Universal Grid Map Library: Implementation and Use Case for Rough Terrain Navigation. In Robot Operating System (ROS). Studies in Computational Intelligence; Koubaa, A., Ed.; Springer: Cham, Switzerland, 2016; Volume 625. [Google Scholar] [CrossRef]
- Thoresen, M.; Nielsen, N.H.; Mathiassen, K.; Pettersen, K.Y. Path Planning for UGVs Based on Traversability Hybrid A. IEEE Robot. Autom. Lett. 2021, 6, 1216–1223. [Google Scholar] [CrossRef]
- Ahtiainen, J.; Stoyanov, T.; Saarinen, J. Normal Distributions Transform Traversability Maps: LiDAR-Only Approach for Traversability Mapping in Outdoor Environments. J. Field Robot. 2017, 34, 600–621. [Google Scholar] [CrossRef]
- Belter, D.; Skrzypczyński, P. Rough terrain mapping and classification for foothold selection in a walking robot. J. Field Robot. 2011, 28, 497–528. [Google Scholar] [CrossRef]
- Thrun, S. Robotic Mapping: A Survey. 2002, pp. 1–35. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.319.3077&rep=rep1&type=pdf (accessed on 15 October 2021).
- Middleton, L.; Sivaswamy, L. Hexagon Image Processing—A Practical Approach; Springer: London, UK, 2005. [Google Scholar]
- Yabushita, A.; Ogawa, K. Image reconstruction with a hexagonal grid. In Proceedings of the Nuclear Science Symposium Conference Record, Norfolk, VA, USA, 10–16 November 2002. [Google Scholar]
- Jeevan, K.; Krishnakumar, S. An Image Steganography Method Using Pseudo Hexagonal Image. Int. J. Pure Appl. Math. 2018, 118, 2729–2735. [Google Scholar]
- Quijano, H.J.; Garrido, L. Improving Cooperative Robot Exploration Using an Hexagonal World Representation. In Proceedings of the Conference: Electronics, Robotics and Automotive Mechanics Conference, Cuernavaca, Morelos, Mexico, 25–28 September 2007. [Google Scholar]
- Rummelt, N. Array Set Addressing: Enabling Efficient Hexagonally Sampled Image Processing. Ph.D. Thesis, Unversity of Florida, Gainesville, FL, USA, 2010. [Google Scholar]
- Wang, Y.; Zheng, N.; Bian, Z. A Closed-Form Solution to Planar Feature-Based Registration of LiDAR Point Clouds. ISPRS Int. J. Geo-Inf. 2021, 10, 435. [Google Scholar] [CrossRef]
- Zhu, R.; Guo, Z.; Zhang, X. Forest 3D Reconstruction and Individual Tree Parameter Extraction Combining Close-Range Photo Enhancement and Feature Matching. Remote Sens. 2021, 13, 1633. [Google Scholar] [CrossRef]
- Martínez, J.L.; Morales, J.; Sánchez, M.; Morán, M.; Reina, A.J.; Fernández-Lozano, J.J. Reactive Navigation on Natural Environments by Continuous Classification of Ground Traversability. Sensors 2020, 20, 6423. [Google Scholar] [CrossRef] [PubMed]
- Duchoň, F.; Huňady, D.; Dekan, M.; Babinec, A. Optimal Navigation for Mobile Robot in Known Environment. Appl. Mech. Mater. 2013, 282, 33–38. [Google Scholar] [CrossRef]
- Siemia̧tkowska, B.; Dubrawski, A. Cellular Neural Networks for Navigation of a Mobile Robot. Lect. Notes Comput. Sci. 1998, 1424, 147–154. [Google Scholar]
- Lakshmanan, A.K.; Mohan, R.E.; Ramalingam, B.; Le, A.V.; Veerajagadeshwar, P.; Tiwari, K.; Ilyas, M. Complete coverage path planning using reinforcement learning for Tetromino based cleaning and maintenance robot. Autom. Constr. 2020, 112, 103078. [Google Scholar] [CrossRef]
- Her, I. Geometric transformations on the hexagonal grid. IEEE Trans. Image Process. 1995, 4, 1213–1222. [Google Scholar] [CrossRef] [PubMed]
- Snyder, W.E.; Qi, H.; Sander, W.A. Coordinate system for hexagonal pixels. In Proceedings of Medical Imaging 1999: Image Processing; The International Society for Optical Engineering: Bellingham, WA, USA, 2004. [Google Scholar]
- Stecz, W.; Gromada, K. UAV Mission Planning with SAR Application. Sensors 2020, 20, 1080. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Siemiatkowska, B.; Stecz, W. A Framework for Planning and Execution of Drone Swarm Missions in a Hostile Environment. Sensors 2021, 12, 4150. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Curve Type | Mean Error for Square Grid | Mean Error for Hexagonal Grid |
|---|---|---|
| line | 0.136 | 0.110 |
| circle | 0.138 | 0.110 |
| polynomial | 0.138 | 0.110 |
| Neighborhood Value | Mean dd |
|---|---|
| 0 | 0.03 |
| 1 | 0.12 |
| 2 | 0.15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duszak, P.; Siemiątkowska, B.; Więckowski, R. Hexagonal Grid-Based Framework for Mobile Robot Navigation. Remote Sens. 2021, 13, 4216. https://doi.org/10.3390/rs13214216
Duszak P, Siemiątkowska B, Więckowski R. Hexagonal Grid-Based Framework for Mobile Robot Navigation. Remote Sensing. 2021; 13(21):4216. https://doi.org/10.3390/rs13214216
Chicago/Turabian StyleDuszak, Piotr, Barbara Siemiątkowska, and Rafał Więckowski. 2021. "Hexagonal Grid-Based Framework for Mobile Robot Navigation" Remote Sensing 13, no. 21: 4216. https://doi.org/10.3390/rs13214216
APA StyleDuszak, P., Siemiątkowska, B., & Więckowski, R. (2021). Hexagonal Grid-Based Framework for Mobile Robot Navigation. Remote Sensing, 13(21), 4216. https://doi.org/10.3390/rs13214216