
Dielectric Properties of Lunar Materials at the Chang’e-4 Landing Site


Abstract
:
1. Introduction
2. Materials and Methods
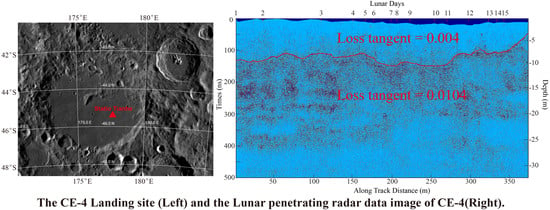
2.1. LPR Data
- Data reading: 2B processing-level data are utilized in the paper, which are generated with raw data after integration, conversion from unsigned integers to signed integers, normalization, removing direct current offset, and adding geometric coordinates.
- Redundant data removal: when LPR is operating, the Yutu-2 rover may stop to perform the operations of other instruments, which generated duplicate data. So, data collected during static sampling should be removed.
- Data file stitching: the files of different lunar days are stored separately. In this step, these data need to be stitched together.
- Adjust the time delay: the receiving antenna is turned on 28.203 ns earlier than the transmitting antenna, so the initial 28.203 ns of all the data traces were removed.
- Background removal: subtracting the average value from the LPR data to reduce the ‘ringing’ effects and periodic noises caused by the antenna–ground coupling.
- Band-pass filter: the finite impulse response (FIR) filter is used to reduce noise. Its cut-off frequencies are set as 150, 250, 750, and 850 MHz.
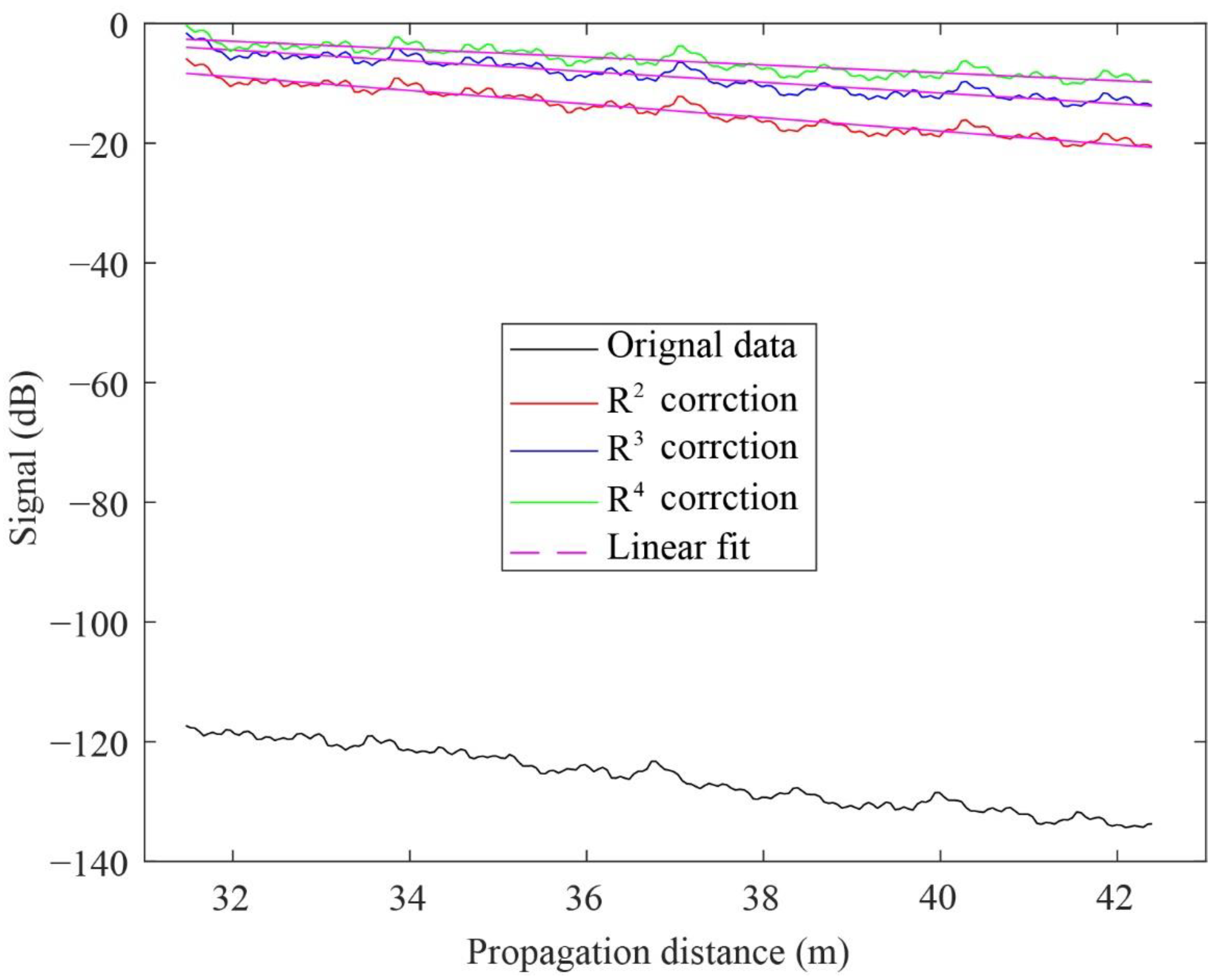
2.2. Loss Tangent Estimation Method
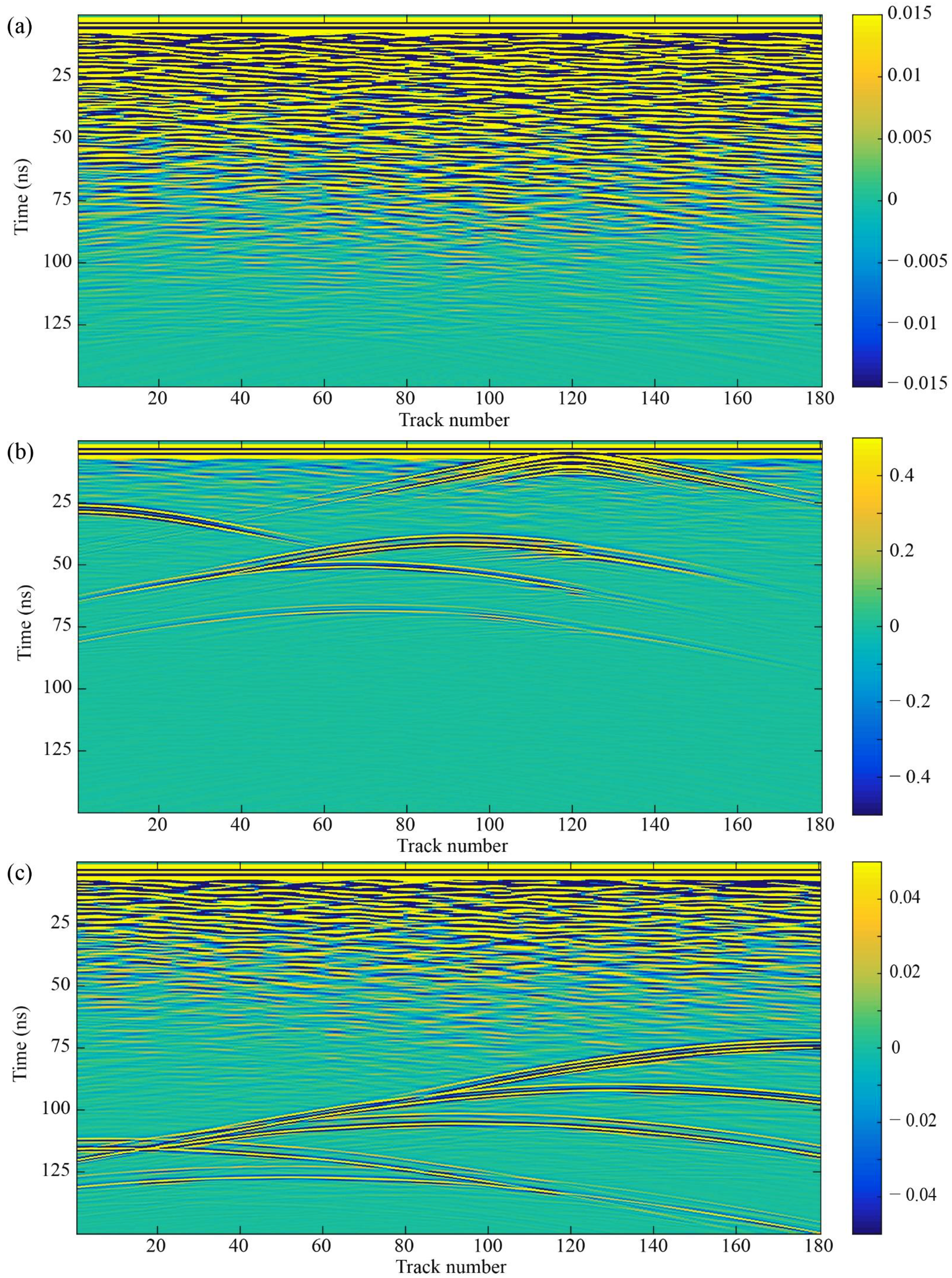
2.3. Simulation Model
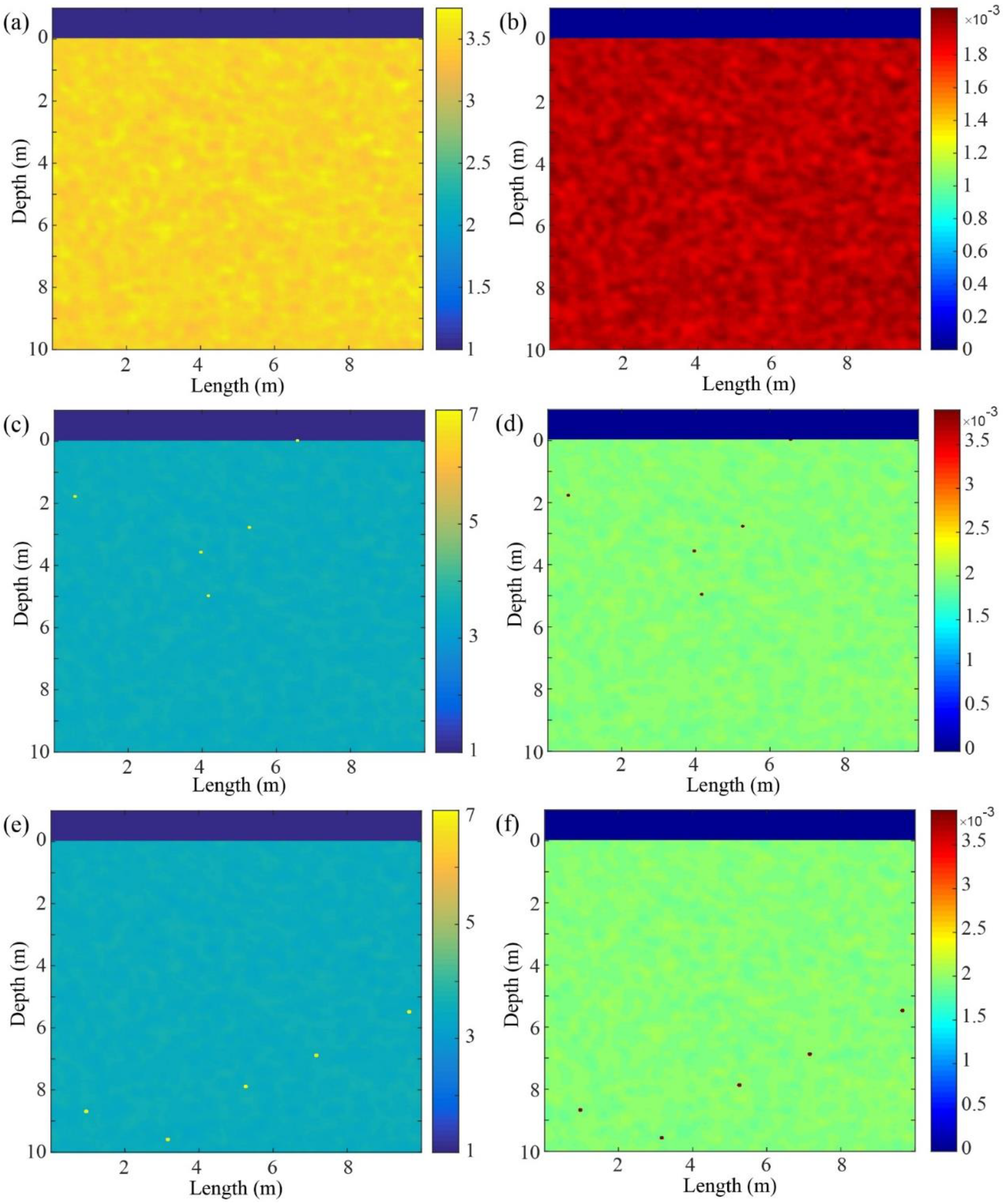
2.3.1. Stochastic Media Model
2.3.2. Simulation Model
3. Results
3.1. Synthetic Data Results
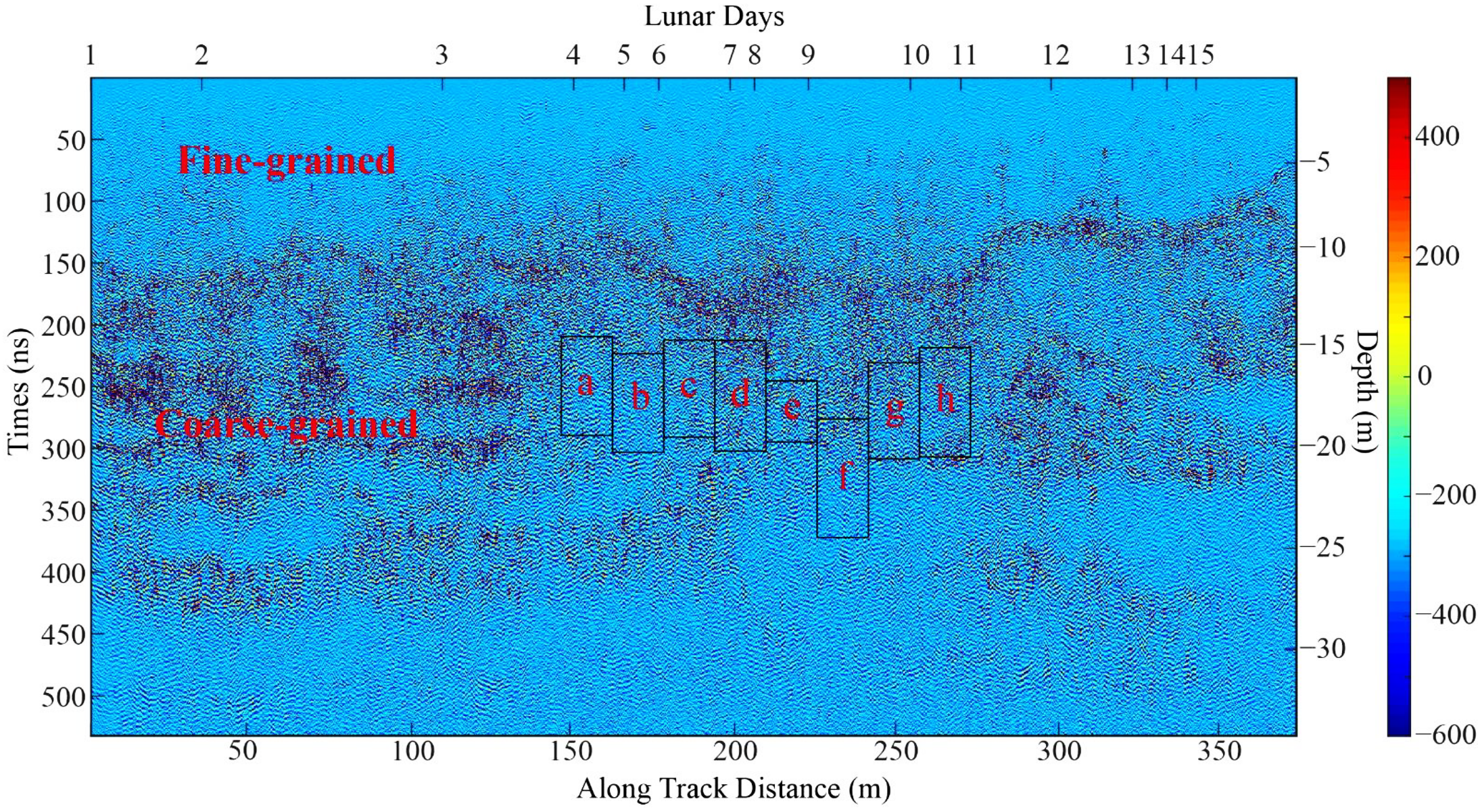
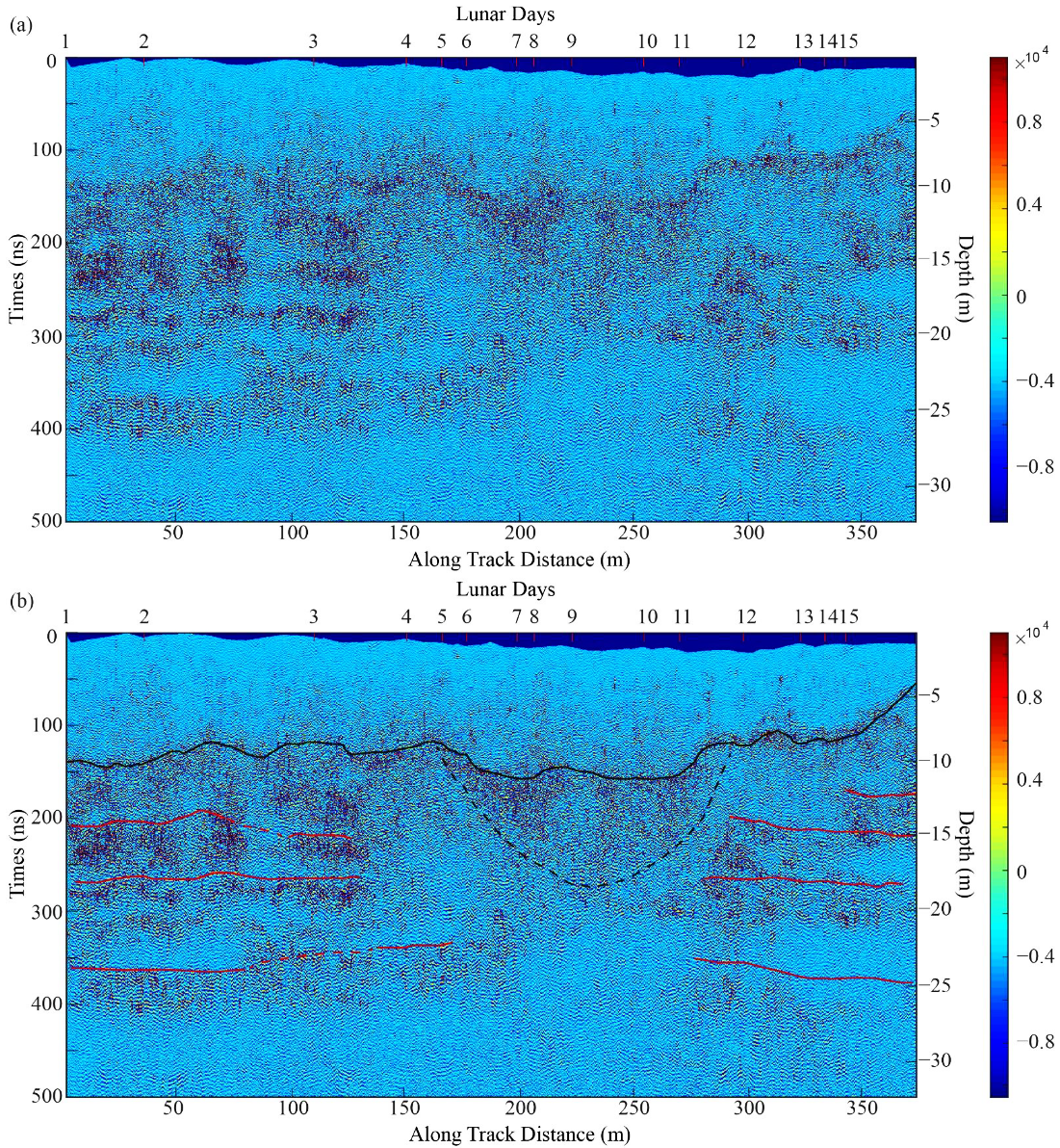
3.2. LPR Results
4. Discussion
4.1. Loss Tangent of the Simulation Model
4.2. Loss Tangent of the Coarse Material
4.3. The Geological History of the Chang’e-4 Landing Site
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fang, G.-Y.; Zhou, B.; Ji, Y.-C.; Zhang, Q.-Y.; Shen, S.-X.; Li, Y.-X.; Guan, H.-F.; Tang, C.-J.; Gao, Y.-Z.; Lu, W.; et al. Lunar Penetrating Radar onboard the Chang’e-3 mission. Res. Astron. Astrophys. 2014, 14, 1607–1622. [Google Scholar] [CrossRef]
- Jia, Y.Z.; Zou, Y.L.; Ping, J.S.; Xue, C.B.; Yan, J.; Ning, Y.M. The scientific objectives and payloads of Chang’E−4 mission. Planet. Space Sci. 2018, 162, 207–215. [Google Scholar] [CrossRef]
- Wu, W.R.; Liu, J.Z.; Tang, Y.H.; Yu, D.Y.; Yu, G.B.; Zhang, Z. China Lunar Exploration Program. J. Deep Space Explor. 2019, 6, 405–416. [Google Scholar] [CrossRef]
- Robinson, M.S.; Brylow, S.M.; Tschimmel, M.; Humm, D.; Lawrence, S.J.; Thomas, P.C.; Denevi, B.; Bowman-Cisneros, E.; Zerr, J.; Ravine, M.A.; et al. Lunar Reconnaissance Orbiter Camera (LROC) Instrument Overview. Space Sci. Rev. 2010, 150, 81–124. [Google Scholar] [CrossRef]
- Barker, M.K.; Mazarico, E.; Neumann, G.A.; Zuber, M.T.; Haruyama, J.; Smith, D.E. A new lunar digital elevation model from the Lunar Orbiter Laser Altimeter and SELENE Terrain Camera. Icarus 2016, 273, 346–355. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Liu, D.; Liu, B.; Ren, X.; Liu, J.; He, Z.; Zuo, W.; Zeng, X.; Xu, R.; Tan, X.; et al. Chang’E-4 initial spectroscopic identification of lunar far-side mantle-derived materials. Nat. Cell Biol. 2019, 569, 378–382. [Google Scholar] [CrossRef]
- Huang, J.; Xiao, Z.Y.; Flahaut, J.; Martinot, M.; Head, J.; Xiao, X.; Xie, M.G.; Xiao, L. Geological characteristics of Von Kármán crater, northwestern south pole-Aitken Basin: Chang’E-4 landing site region. J. Geophys. Res. Planet. 2018, 123, 1684–1700. [Google Scholar] [CrossRef] [Green Version]
- Pasckert, J.H.; Hiesinger, H.; van der Bogert, C.H. Lunar farside volcanism in and around the South Pole–Aitken basin. Icarus 2018, 299, 538–562. [Google Scholar] [CrossRef]
- Ling, Z.C.; Qiao, L.; Liu, C.Q.; Cao, H.J.; Bi, X.Y.; Lu, X.J.; Zhang, J.; Fu, X.H.; Li, B.; Liu, J. Composition, mineralogy and chronology of mare basalts and non-mare materials in Von Kármán crater: Landing site of the Chang’E−4 mission. Planet. Space Sci. 2019, 179, 104741. [Google Scholar] [CrossRef]
- Gou, S.; Yue, Z.; Di, K.; Bugiolacchi, R.; Wan, W.; Yang, M.; Ye, L. Geologically Old but Freshly Exposed Rock Fragments En-countered by Yutu-2 Rover. J. Geophys. Res. Planet. 2021, 126, e2020JE006565. [Google Scholar] [CrossRef]
- Lin, H.; He, Z.; Yang, W.; Lin, Y.; Xu, R.; Zhang, C.; Zhu, M.-H.; Chang, R.; Zhang, J.; Li, C.; et al. Olivine-norite rock detected by the lunar rover Yutu-2 likely crystallized from the SPA-impact melt pool. Natl. Sci. Rev. 2020, 7, 913–920. [Google Scholar] [CrossRef] [Green Version]
- Lai, J.; Xu, Y.; Bugiolacchi, R.; Meng, X.; Xiao, L.; Xie, M.; Liu, B.; Di, K.; Zhang, X.; Zhou, B.; et al. First look by the Yutu-2 rover at the deep subsurface structure at the lunar farside. Nat. Commun. 2020, 11, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Lai, J.; Xu, Y.; Zhang, X.; Xiao, L.; Yan, Q.; Meng, X.; Zhou, B.; Dong, Z.; Zhao, D. Comparison of Dielectric Properties and Structure of Lunar Regolith at Chang’e-3 and Chang’e-4 Landing Sites Revealed by Ground-Penetrating Radar. Geophys. Res. Lett. 2019, 46, 12783–12793. [Google Scholar] [CrossRef]
- Li, C.; Su, Y.; Pettinelli, E.; Xing, S.; Ding, C.; Liu, J.; Ren, X.; Lauro, S.E.; Soldovieri, F.; Zeng, X.; et al. The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 Lunar Penetrating Radar. Sci. Adv. 2020, 6, eaay6898. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, R.; Su, Y.; Ding, C.; Dai, S.; Liu, C.; Zhang, Z.; Hong, T.; Zhang, Q.; Li, C. A Novel Approach for Permittivity Estimation of Lunar Regolith Using the Lunar Penetrating Radar Onboard Chang’E-4 Rover. Remote. Sens. 2021, 13, 3679. [Google Scholar] [CrossRef]
- Zhang, L.; Li, J.; Zeng, Z.; Xu, Y.; Liu, C.; Chen, S. Stratigraphy of the Von Kármán Crater Based on Chang’E-4 Lunar Pene-trating Radar Data. Geophys. Res. Lett. 2020, 47, e2020GL088680. [Google Scholar]
- Zhang, J.; Zhou, B.; Lin, Y.; Zhu, M.H.; Song, H.; Dong, Z.; Ouyang, Z. Lunar regolith and substructure at Chang’E-4 landing site in South Pole–Aitken basin. Nat. Astron. 2021, 5, 25–30. [Google Scholar] [CrossRef]
- Dong, Z.; Fang, G.; Zhao, D.; Zhou, B.; Gao, Y.; Ji, Y. Dielectric Properties of Lunar Subsurface Materials. Geophys. Res. Lett. 2020, 47, e2020GL089264. [Google Scholar] [CrossRef]
- Dong, Z.; Fang, G.; Zhou, B.; Zhao, D.; Gao, Y.; Ji, Y. Properties of Lunar Regolith on the Moon’s Farside unveiled by Chang’E-4 Lunar Penetrating Radar. J. Geophys. Res. Planet. 2021, 126, e2020JE006564. [Google Scholar] [CrossRef]
- Dong, Z.; Feng, X.; Zhou, H.; Liu, C.; Zeng, Z.; Li, J.; Liang, W. Properties Analysis of Lunar Regolith at Chang’E-4 Landing Site Based on 3D Velocity Spectrum of Lunar Penetrating Radar. Remote Sens. 2020, 12, 629. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Zhang, J. Velocity Analysis Using Separated Diffractions for Lunar Penetrating Radar Obtained by Yutu-2 Rover. Remote Sens. 2021, 13, 1387. [Google Scholar] [CrossRef]
- Su, Y.; Fang, G.-Y.; Feng, J.-Q.; Xing, S.-G.; Ji, Y.-C.; Zhou, B.; Gao, Y.-Z.; Li, H.; Dai, S.; Xiao, Y.; et al. Data processing and initial results of Chang’e-3 lunar penetrating radar. Res. Astron. Astrophys. 2014, 14, 1623–1632. [Google Scholar] [CrossRef]
- Grimm, R.E.; Heggy, E.; Clifford, S.; Dinwiddie, C.; McGinnis, R.; Farrell, D. Absorption and scattering in ground-penetrating radar: Analysis of the Bishop Tuff. J. Geophys. Res. Space Phys. 2006, 111. [Google Scholar] [CrossRef] [Green Version]
- O’Donnell, R.M. Introduction to Radar Systems; MIT OpenCourseWare, Primavera; Massachusetts Institute of Technology: Cambridge, MA, USA, 2007. [Google Scholar]
- Ward, S.H.; Hohmann, G.W. Electromagnetic Theory for Geophysical Applications. In Electromagnetic Methods in Applied Geophysics; Society of Exploration Geophysicists: Beijing, China, 1988; pp. 130–311. [Google Scholar]
- Zhang, X.; Lv, W.; Zhang, L.; Zhang, J.; Lin, Y.; Yao, Z. Self-Organization Characteristics of Lunar Regolith Inferred by Yutu-2 Lunar Penetrating Radar. Remote Sens. 2021, 13, 3017. [Google Scholar] [CrossRef]
- Jiang, Z.; Zeng, Z.; Li, J.; Liu, F.; Li, W. Simulation and analysis of GPR signal based on stochastic media model with an ellip-soidal autocorrelation function. J. Appl. Geophys. 2013, 99, 91–97. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A.; Giannakis, I. gprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar. Comput. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Zhang, X.; Qiao, L.; Lai, J. Evaluating the Thickness and Stratigraphy of Ejecta Materials at the Chang’e-4 Landing Site. Astron. J. 2021, 162, 29. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, Y.; Bugiolacchi, R.; Hu, B.; Liu, C.; Lai, J.; Zeng, Z.; Huo, Z. Rock abundance and evolution of the shallow stratum on Chang’e-4 landing site unveiled by lunar penetrating radar data. Earth Planet. Sci. Lett. 2021, 564, 116912. [Google Scholar] [CrossRef]
- Zhou, H.; Feng, X.; Ding, C.; Dong, Z.; Liu, C.; Zhang, Y.; Meng, Z. Yutu-2 Radar Sounding Evidence of a Buried Crater at Chang’E-4 Landing Site. IEEE Trans. Geosci. Remote Sens. 2021, PP, 1–19. [Google Scholar] [CrossRef]
- Carrier, E.D., III; Olhoeft, G.R.; Mendell, W. Physical properties of the lunar surface. In The Lunar Sourcebook; Cambridge University Press: Cambridge, UK, 1991; p. 543. [Google Scholar]
- Guo, D.; Fa, W.; Zeng, X.; Du, J.; Liu, J. Geochemistry of the Von Kármán crater floor and thickness of the non-mare ejecta over the Chang’e-4 landing area. Icarus 2021, 359, 114327. [Google Scholar] [CrossRef]
- Zeng, Q.; Chen, S.; Zhang, Y.; Mu, Y.; Dai, R.; Yang, C.; Li, A.; Lu, P. Mineralogical and chemical properties inversed from 21-lunar-day VNIS observations taken during the Chang’E-4 mission. Sci. Rep. 2021, 11, 1–10. [Google Scholar] [CrossRef]
- Ohtake, M.; Haruyama, J.; Matsunaga, T.; Yokota, Y.; Morota, T.; Honda, C. Performance and scientific objectives of the SE-LENE (KAGUYA) Multiband Imager. Earth Planet. Space 2008, 60, 257–264. [Google Scholar] [CrossRef] [Green Version]
- Qiao, L.; Ling, Z.; Fu, X.; Li, B. Geological characterization of the Chang’e-4 landing area on the lunar farside. Icarus 2019, 333, 37–51. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Correction Method | Slope | Loss Tangent | Error Bar | R-Squared |
|---|---|---|---|---|---|
| Model one | R2 | −2.6730 | 0.0314 | 0.0001 | 0.9665 |
| Model one | R3 | −1.9526 | 0.0229 | 0.0001 | 0.9293 |
| Model one | R4 | −1.2322 | 0.0145 | 0.0002 | 0.8103 |
| Model two | R2 | −2.8368 | 0.0333 | 0.0006 | 0.8332 |
| Model two | R3 | −2.3228 | 0.0273 | 0.0006 | 0.7699 |
| Model two | R4 | −1.8087 | 0.0212 | 0.0006 | 0.6695 |
| Model three | R2 | −2.4643 | 0.0290 | 0.0009 | 0.7055 |
| Model three | R3 | −1.3300 | 0.0156 | 0.0009 | 0.4133 |
| Model three | R4 | −0.4246 | 0.0023 | 0.0009 | 0.0151 |
| Along Track Distance (m) | Propagation Distance (m) | Correction Method | Slope | Loss Tangent | Error bar | R-Squared | Average |
|---|---|---|---|---|---|---|---|
| 146.8–162.9 | 31–43 | R2 | −1.098 | 0.0129 | 0.0005 | 0.9233 | |
| R3 | −0.862 | 0.0101 | 0.0005 | 0.8816 | |||
| R4 | −0.625 | 0.0073 | 0.0005 | 0.7972 | |||
| 162.9–178.3 | 33–46 | R2 | −1.082 | 0.0127 | 0.0005 | 0.9105 | |
| R3 | −0.862 | 0.0101 | 0.0005 | 0.8676 | |||
| R4 | −0.641 | 0.0075 | 0.0005 | 0.7863 | |||
| 178.3–194.0 | 32–44 | R2 | −1.181 | 0.0139 | 0.0004 | 0.9437 | |
| R3 | −0.95 | 0.0112 | 0.0004 | 0.9144 | |||
| R4 | −0.72 | 0.0085 | 0.0004 | 0.8574 | |||
| 194.0–209.8 | 32–46 | R2 | −1.115 | 0.0131 | 0.0005 | 0.9048 | |
| R3 | −0.89 | 0.0104 | 0.0005 | 0.8599 | |||
| R4 | −0.664 | 0.0078 | 0.0005 | 0.7761 | |||
| 209.8–225.4 | 37–44 | R2 | −0.954 | 0.0112 | 0.0007 | 0.868 | |
| R3 | −0.74 | 0.0087 | 0.0007 | 0.7968 | |||
| R4 | −0.526 | 0.0062 | 0.0007 | 0.6624 | |||
| 225.4–241.6 | 41–56 | R2 | −1.199 | 0.0141 | 0.0004 | 0.9522 | |
| R3 | −1.02 | 0.012 | 0.0004 | 0.9329 | |||
| R4 | −0.841 | 0.0099 | 0.0004 | 0.9012 | |||
| 241.6–258.3 | 34–47 | R2 | −1.064 | 0.0125 | 0.0005 | 0.9086 | |
| R3 | −0.849 | 0.01 | 0.0005 | 0.8624 | |||
| R4 | −0.634 | 0.0074 | 0.0005 | 0.7757 | |||
| 258.3–273.0 | 33–46 | R2 | −1.139 | 0.0134 | 0.0004 | 0.9543 | |
| R3 | −0.918 | 0.0108 | 0.0004 | 0.9311 | |||
| R4 | −0.696 | 0.0082 | 0.0004 | 0.8855 |
| Along Track Distance (m) | Propagation Distance (m) | Correction Method | Slope | Loss Tangent | Error Bar | R-Squared | Average |
|---|---|---|---|---|---|---|---|
| 146.8–208.1 | 31.5–42.5 | R2 | −1.1196 | 0.0132 | 0.0004 | 0.9507 | |
| R3 | −0.8868 | 0.0104 | 0.0004 | 0.9246 | |||
| R4 | −0.6540 | 00.0077 | 0.0004 | 0.8709 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, J.; Cui, F.; Xu, Y.; Liu, C.; Zhang, L. Dielectric Properties of Lunar Materials at the Chang’e-4 Landing Site. Remote Sens. 2021, 13, 4056. https://doi.org/10.3390/rs13204056
Lai J, Cui F, Xu Y, Liu C, Zhang L. Dielectric Properties of Lunar Materials at the Chang’e-4 Landing Site. Remote Sensing. 2021; 13(20):4056. https://doi.org/10.3390/rs13204056
Chicago/Turabian StyleLai, Jialong, Feifei Cui, Yi Xu, Chaofei Liu, and Ling Zhang. 2021. "Dielectric Properties of Lunar Materials at the Chang’e-4 Landing Site" Remote Sensing 13, no. 20: 4056. https://doi.org/10.3390/rs13204056
APA StyleLai, J., Cui, F., Xu, Y., Liu, C., & Zhang, L. (2021). Dielectric Properties of Lunar Materials at the Chang’e-4 Landing Site. Remote Sensing, 13(20), 4056. https://doi.org/10.3390/rs13204056