Spatial Temporal Analysis of Traffic Patterns during the COVID-19 Epidemic by Vehicle Detection Using Planet Remote-Sensing Satellite Images


Abstract

1. Introduction
- We develop a morphology-based vehicle detection method on the 3-m resolution Planet images with validation for the detection accuracy.
- Based on our developed method, we generate the traffic density trends for five cities and districts at an average temporal resolution of 7.1 days to offer instrumental insights that low-resolution satellite images can be utilized to estimate traffic intensity at a small geographical scale
- We compare our trend data with COVID-19 data and government response index provided by the Oxford COVID-19 Government Response Tracker [18], we validated the potential of using traffic density through our methods as an effective tool to analyze the impact of extreme events (COVID-19 in this case) at a small geographic scale, to benefit more timely decision support at the global level.
2. Related Works
2.1. Vehicle Detection Using High-Resolution Remote-Sensing Images
2.2. Correlating Mobility with COVID-19
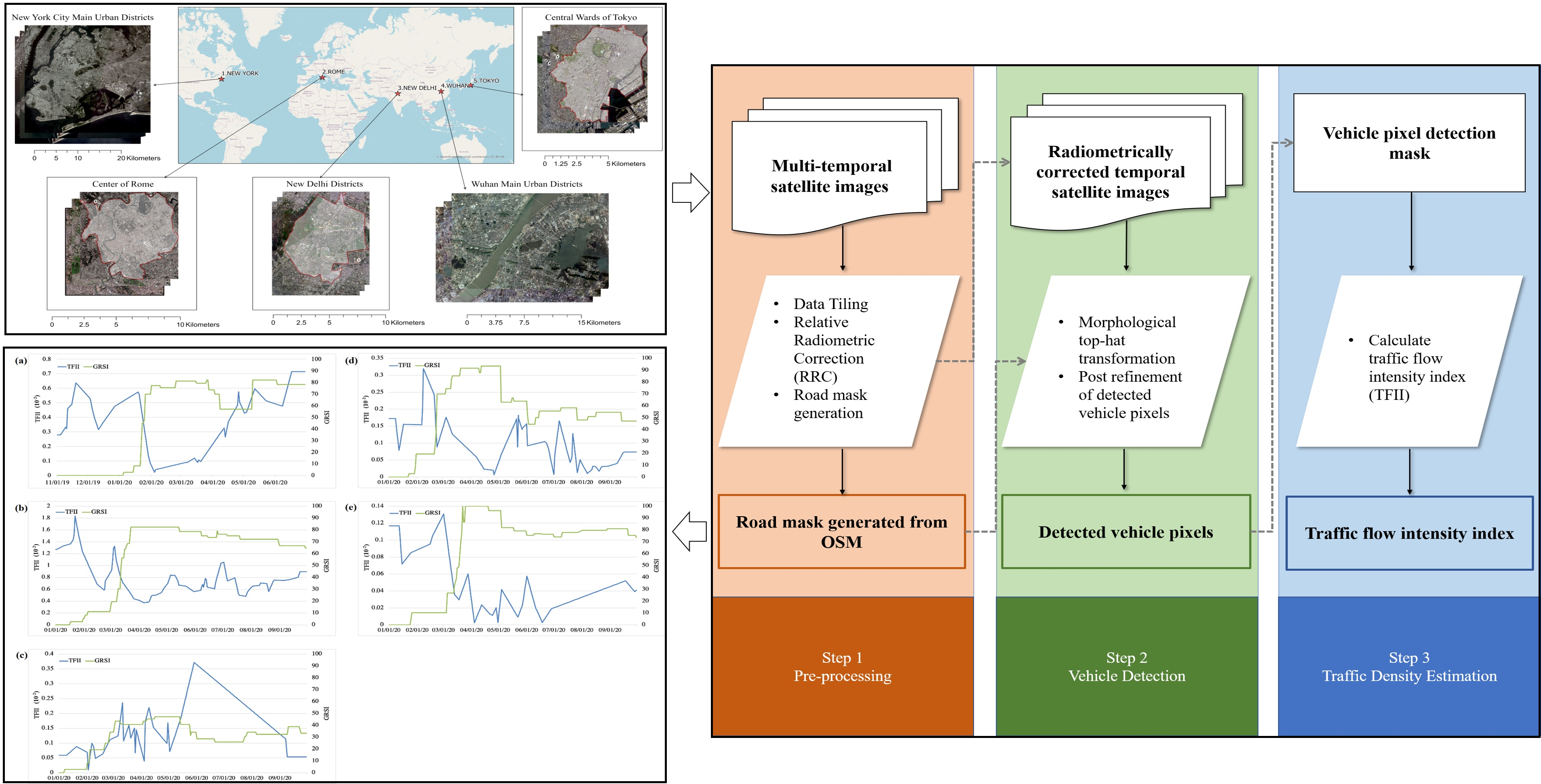
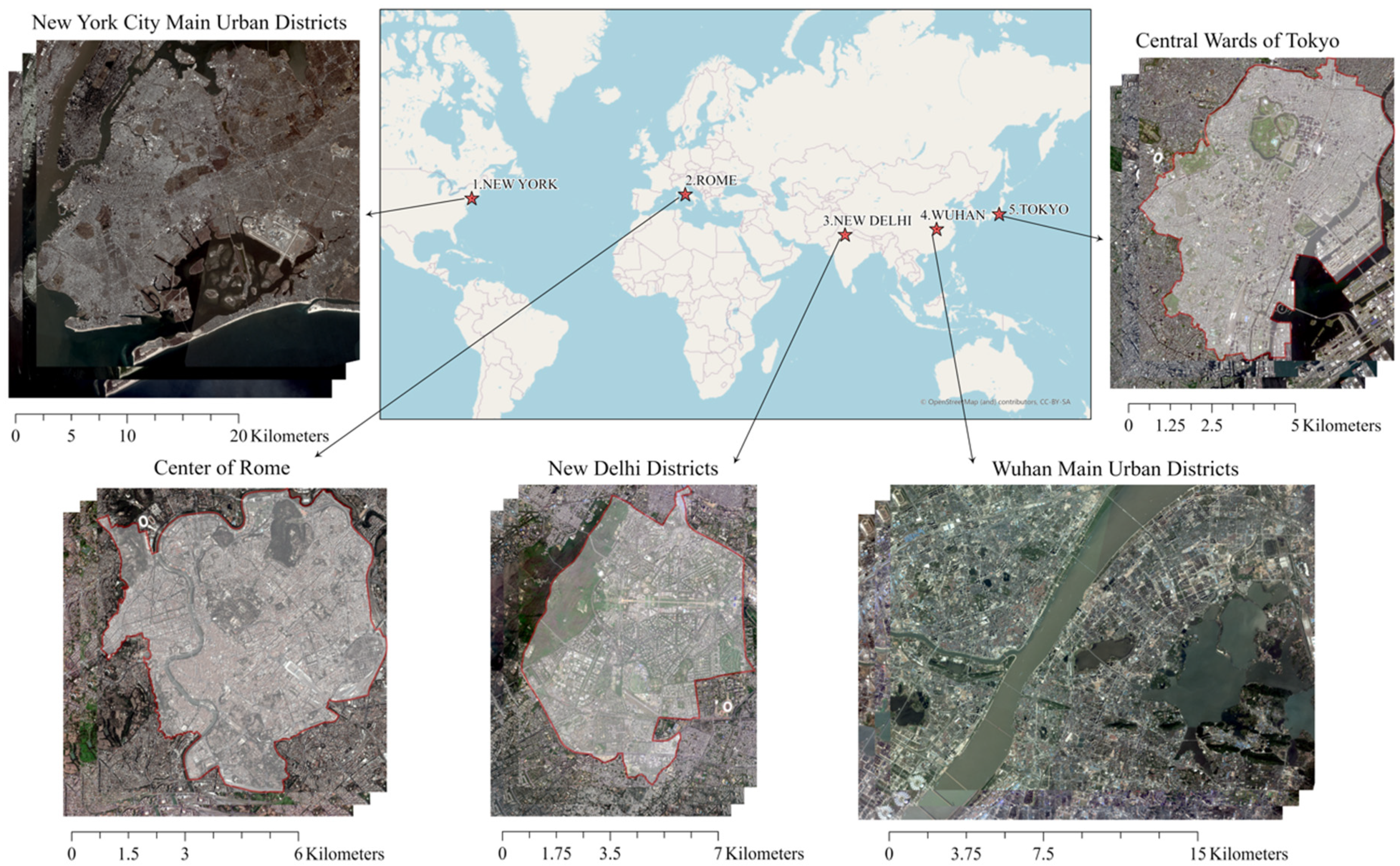
3. Study Areas and Data
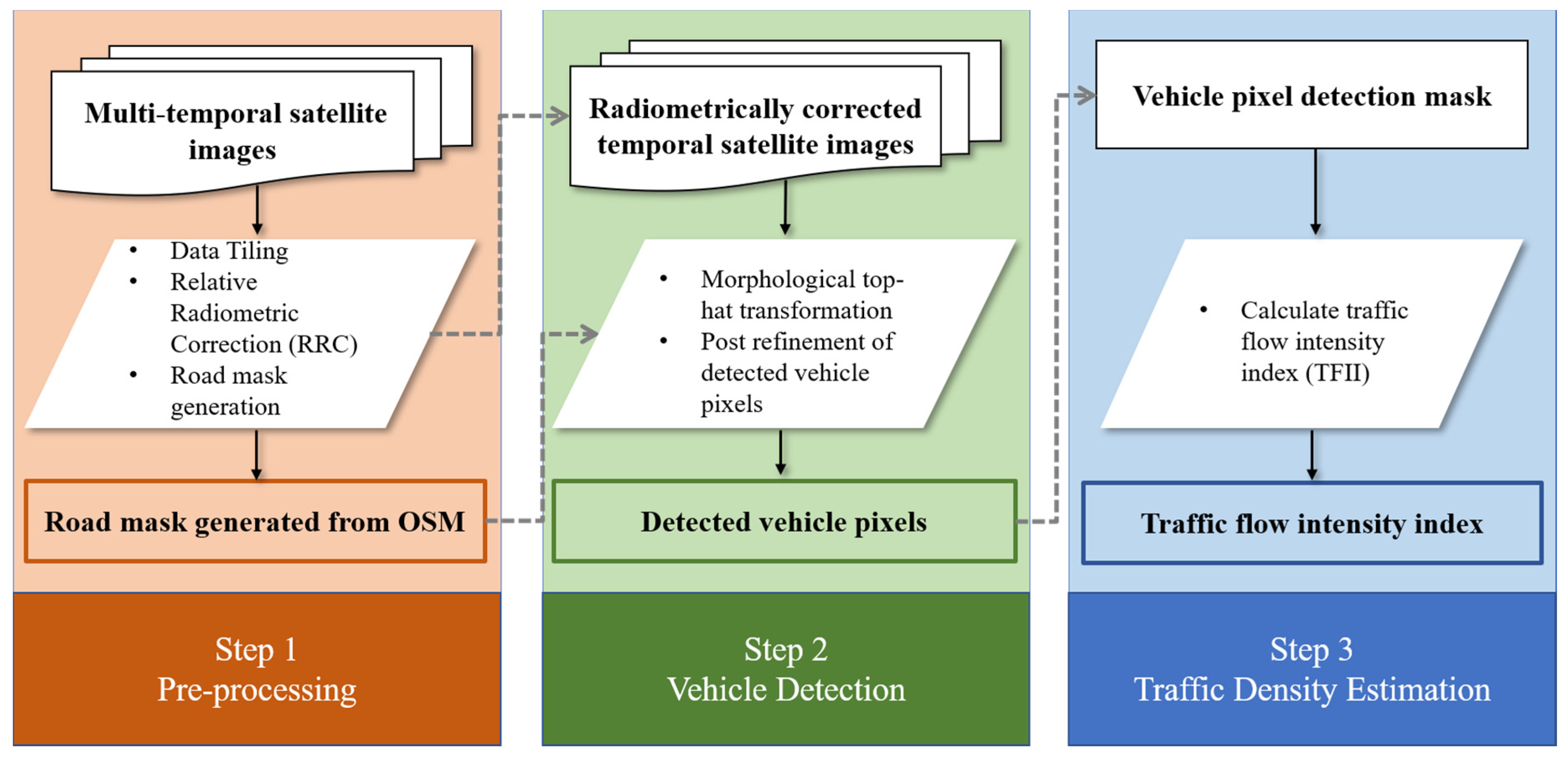
4. The Proposed Vehicle Detection and Traffic Density Estimation Framework
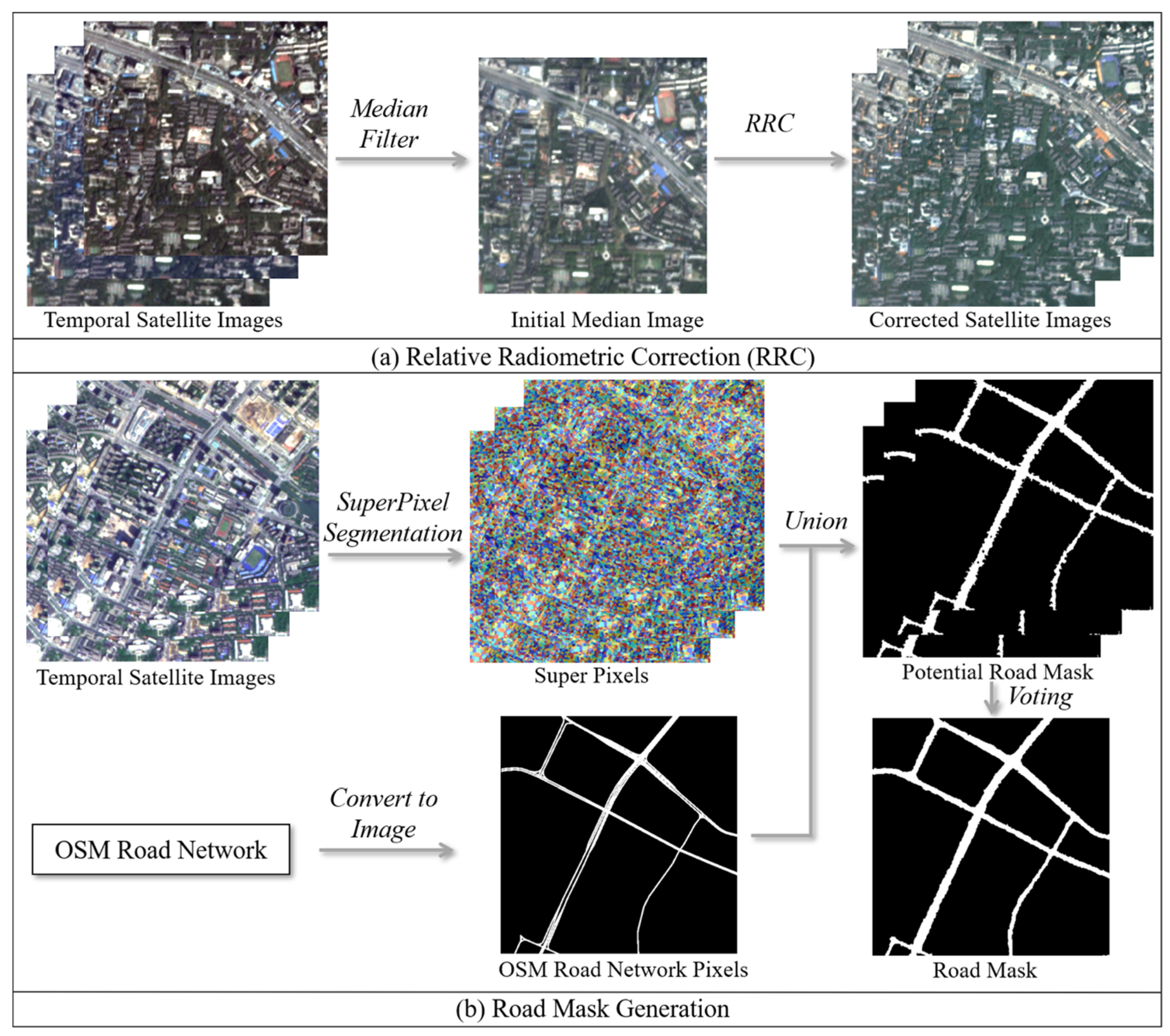
4.1. Pre-Processing—Radiometric Correction and Road Mask Refinement
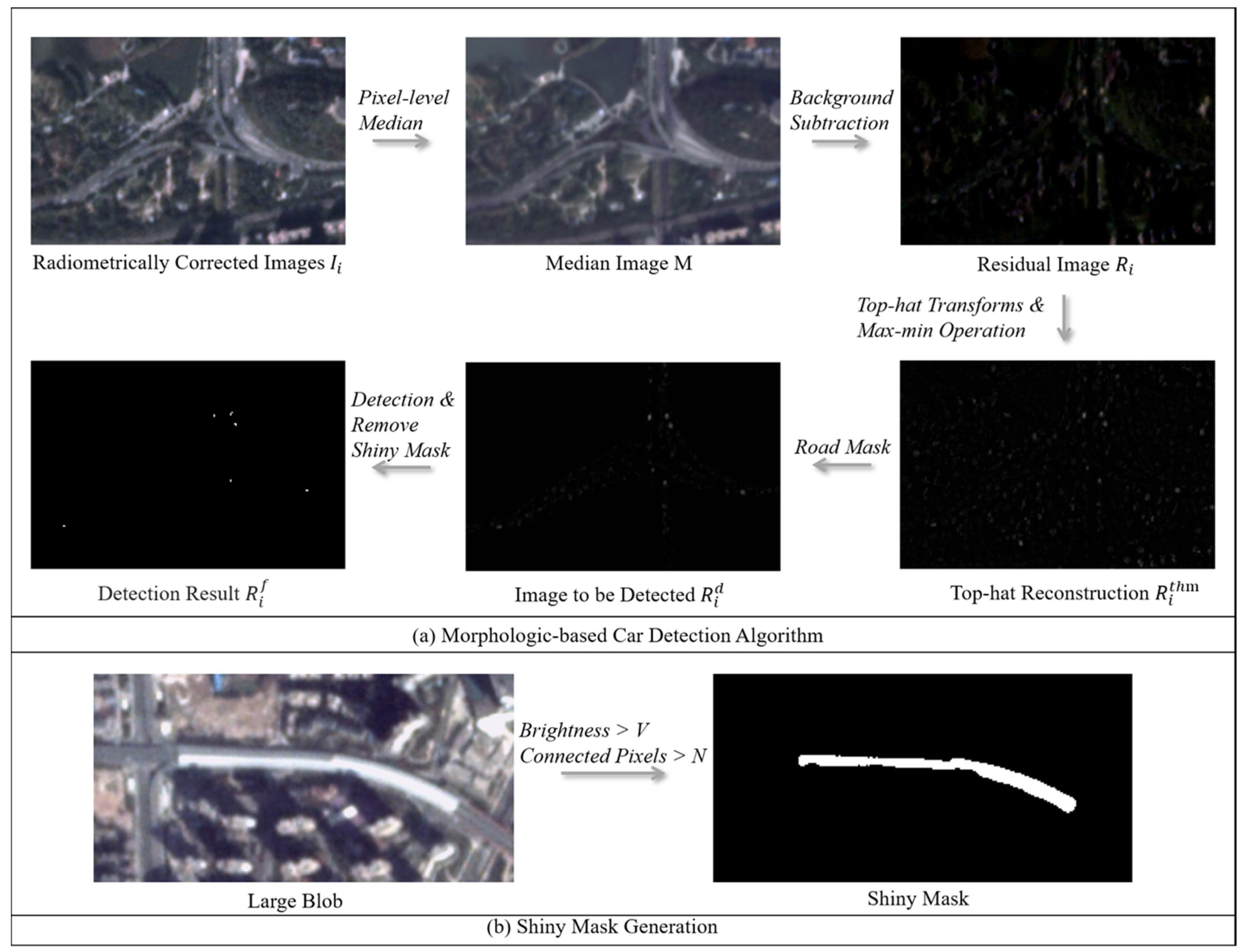
4.2. The Proposed Morphology-Based Vehicle Detection Method
4.3. Traffic Flow Intensity Index (TFII)
5. Experimental Results and Analysis
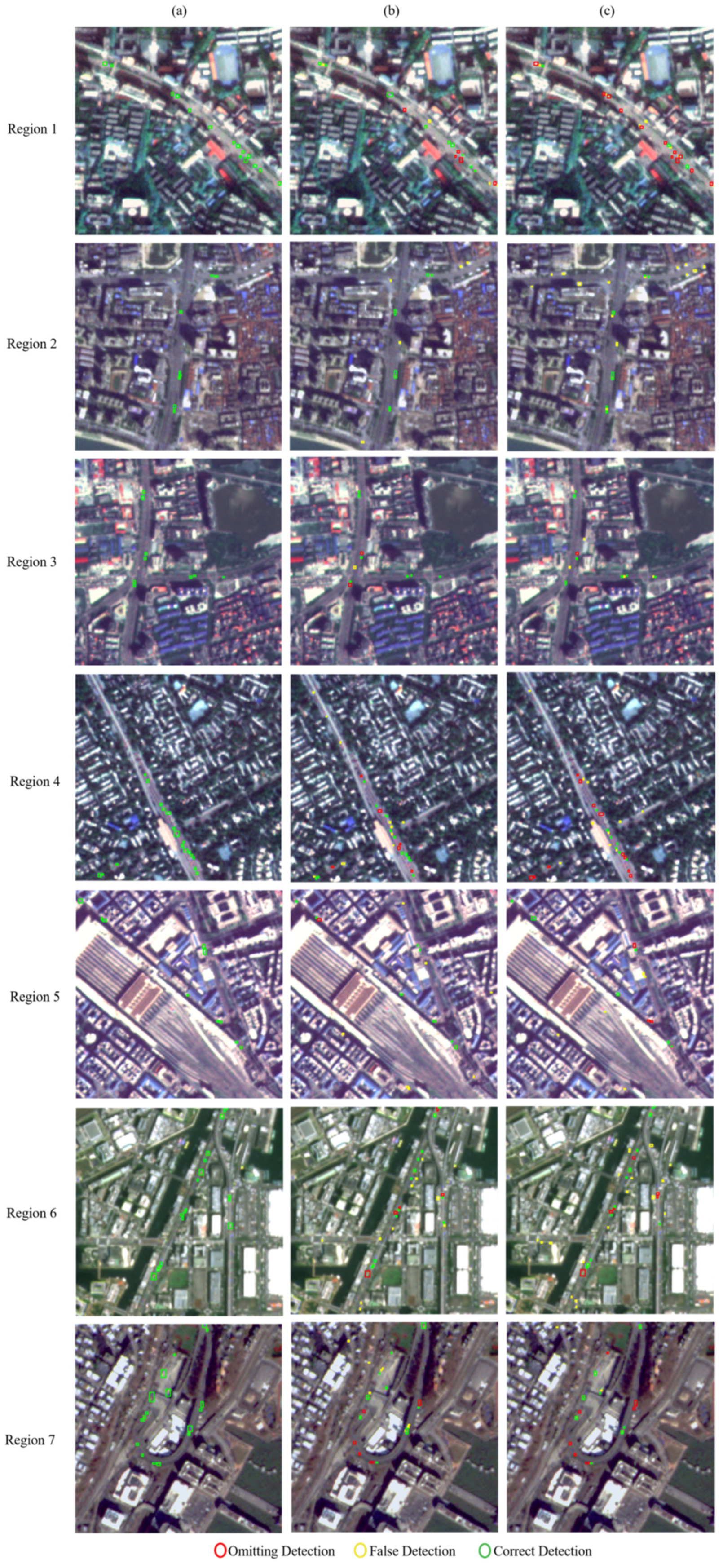
5.1. Validation of Vehicle Detection Algorithm
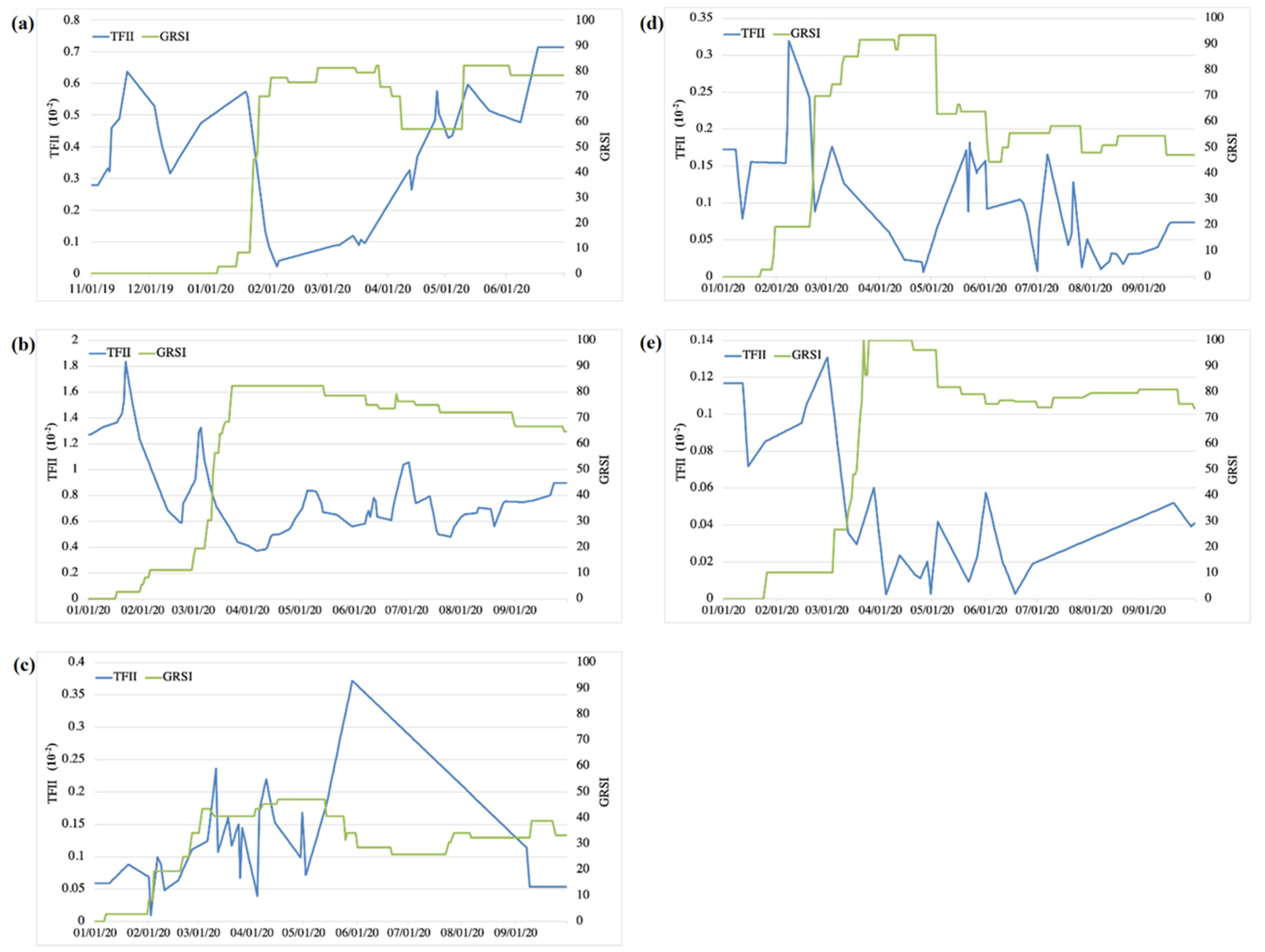
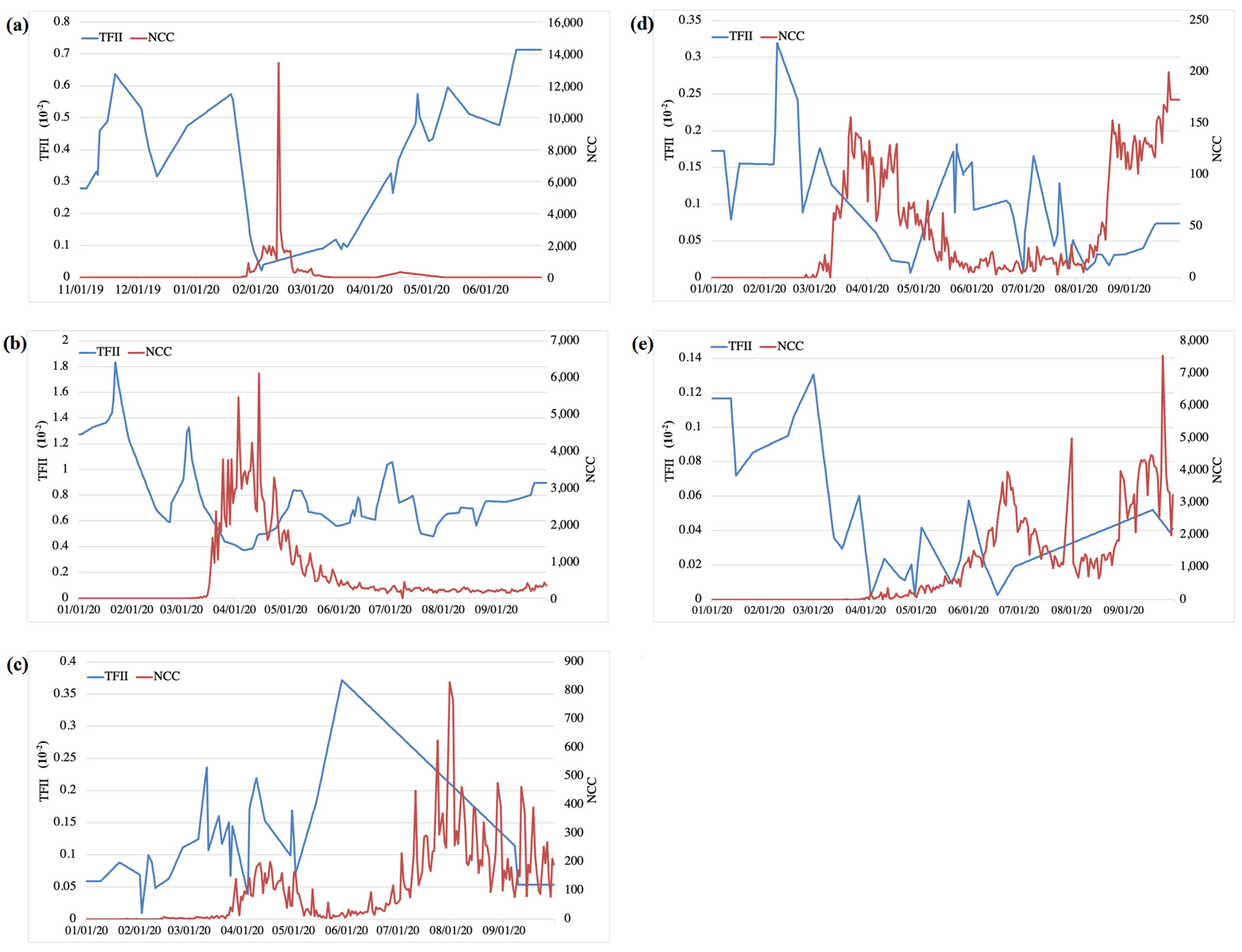
5.2. Analyze Traffic Flow Dynamics
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rothan, H.A.; Byrareddy, S.N. The epidemiology and pathogenesis of coronavirus disease (COVID-19) outbreak. J. Autoimmun. 2020, 109, 102433. [Google Scholar] [CrossRef] [PubMed]
- Spinelli, A.; Pellino, G. COVID-19 pandemic: Perspectives on an unfolding crisis. Br. J. Surg. 2020, 107, 785–787. [Google Scholar] [CrossRef] [PubMed]
- Haushofer, J.; Metcalf, C.J.E. Which interventions work best in a pandemic? Science 2020, 368, 1063–1065. [Google Scholar] [CrossRef] [PubMed]
- Dong, E.; Du, H.; Gardner, L. An interactive web-based dashboard to track COVID-19 in real time. Lancet Infect. Dis. 2020, 20, 533–534. [Google Scholar] [CrossRef]
- Askitas, N.; Tatsiramos, K.; Verheyden, B. Lockdown Strategies, Mobility Patterns and Covid-19. arXiv 2020, arXiv:2006.00531. [Google Scholar]
- Alexander, D.; Karger, E. Do Stay-at-Home Orders Cause People to Stay at Home? Effects of Stay-at-Home Orders on Consumer Behavior. SSRN Electron. J. 2020. [Google Scholar] [CrossRef]
- Tull, M.T.; Edmonds, K.A.; Scamaldo, K.M.; Richmond, J.R.; Rose, J.P.; Gratz, K.L. Psychological Outcomes Associated with Stay-at-Home Orders and the Perceived Impact of COVID-19 on Daily Life. Psychiatry Res. 2020, 289, 113098. [Google Scholar] [CrossRef]
- Chinazzi, M.; Davis, J.T.; Ajelli, M.; Gioannini, C.; Litvinova, M.; Merler, S.; Piontti, A.P.Y.; Mu, K.; Rossi, L.; Sun, K.; et al. The effect of travel restrictions on the spread of the 2019 novel coronavirus (COVID-19) outbreak. Science 2020, 368, 395–400. [Google Scholar] [CrossRef]
- Gualtieri, G.; Brilli, L.; Carotenuto, F.; Vagnoli, C.; Zaldei, A.; Gioli, B. Quantifying road traffic impact on air quality in urban areas: A Covid19-induced lockdown analysis in Italy. Environ. Pollut. 2020, 267, 115682. [Google Scholar] [CrossRef]
- Warren, M.S.; Skillman, S.W. Mobility Changes in Response to COVID-19. arXiv 2020, arXiv:2003.14228. [Google Scholar]
- Bisanzio, D.; Kraemer, M.U.; Bogoch, I.; Brewer, T.; Brownstein, J.S.; Reithinger, R. Use of Twitter social media activity as a proxy for human mobility to predict the spatiotemporal spread of COVID-19 at global scale. Geospat. Health 2020, 15. [Google Scholar] [CrossRef] [PubMed]
- Lv, Z.; Pomeroy, J.W. Detecting intercepted snow on mountain needleleaf forest canopies using satellite remote sensing. Remote. Sens. Environ. 2019, 231, 111222. [Google Scholar] [CrossRef]
- Zurqani, H.A.; Post, C.J.; Mikhailova, E.A.; Allen, J.S. Mapping Urbanization Trends in a Forested Landscape Using Google Earth Engine. Remote. Sens. Earth Syst. Sci. 2019, 2, 173–182. [Google Scholar] [CrossRef]
- Orimoloye, I.; Mazinyo, S.P.; Kalumba, A.M.; Nel, W.; Adigun, A.I.; Ololade, O.O. Wetland shift monitoring using remote sensing and GIS techniques: Landscape dynamics and its implications on Isimangaliso Wetland Park, South Africa. Earth Sci. Inform. 2019, 12, 553–563. [Google Scholar] [CrossRef]
- Singh, S.; Reddy, C.S.; Pasha, S.V.; Dutta, K.; Saranya, K.R.L.; Satish, K.V. Modeling the spatial dynamics of deforestation and fragmentation using Multi-Layer Perceptron neural network and landscape fragmentation tool. Ecol. Eng. 2017, 99, 543–551. [Google Scholar] [CrossRef]
- Planet Team. Planet Application Program Interface: In Space for Life on Earth; Planet Team: San Francisco, CA, USA, 2017; Available online: https://api.planet.com (accessed on 6 January 2021).
- Haklay, M.; Weber, P. OpenStreetMap: User-Generated Street Maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef]
- Hale, T.; Petherick, A.; Phillips, T.; Webster, S. Variation in Government Responses to COVID-19; Blavatnik School Working Paper; Blavatnik School of Government, University of Oxford: Oxford, UK, 2020; Volume 31. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press Cambridge: Cambridge, MA, USA, 2016; Volume 1. [Google Scholar]
- Dai, Z.; Song, H.; Wang, X.; Fang, Y.; Yun, X.; Zhang, Z.; Li, H. Video-Based Vehicle Counting Framework. IEEE Access 2019, 7, 64460–64470. [Google Scholar] [CrossRef]
- Zhang, S.; Wu, G.; Costeira, J.P.; Moura, J.M.F. Fcn-rlstm: Deep Spatio-Temporal Neural Networks for Vehicle Counting in City Cameras. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 3667–3676. [Google Scholar]
- Eslami, M.; Faez, K. Automatic Traffic Monitoring from Satellite Images Using Artificial Immune System. In Lecture Notes in Computer Science; Springer Science and Business Media LLC: Berlin, Germany, 2010; pp. 170–179. [Google Scholar]
- Tuermer, S.; Kurz, F.; Reinartz, P.; Stilla, U. Airborne Vehicle Detection in Dense Urban Areas Using HoG Features and Disparity Maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2013, 6, 2327–2337. [Google Scholar] [CrossRef]
- Eikvil, L.; Aurdal, L.; Koren, H. Classification-based vehicle detection in high-resolution satellite images. ISPRS J. Photogramm. Remote. Sens. 2009, 64, 65–72. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote. Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Jiang, Q.; Cao, L.; Cheng, M.; Wang, C.; Li, J. Deep Neural Networks-Based Vehicle Detection in Satellite Images. In Proceedings of the IEEE 2015 International Symposium on Bioelectronics and Bioinformatics (ISBB), Beijing, China, 14–17 October 2015; pp. 184–187. [Google Scholar]
- Liu, Y.; Liu, N.; Huo, H.; Fang, T. Vehicle Detection in High Resolution Satellite Images with Joint-Layer Deep Convolutional Neural Networks. In Proceedings of the 23rd International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Nanjing, China, 28–30 November 2016; pp. 1–6. [Google Scholar]
- Chen, X.; Xiang, S.; Liu, C.-L.; Pan, C.-H. Vehicle Detection in Satellite Images by Hybrid Deep Convolutional Neural Networks. IEEE Geosci. Remote. Sens. Lett. 2014, 11, 1797–1801. [Google Scholar] [CrossRef]
- Sakai, K.; Seo, T.; Fuse, T. Traffic Density Estimation Method from Small Satellite Imagery: Towards Frequent Remote Sensing of Car Traffic. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1776–1781. [Google Scholar]
- Kang, Y.; Gao, S.; Liang, Y.; Li, M.; Rao, J.; Kruse, J. Multiscale dynamic human mobility flow dataset in the U.S. during the COVID-19 epidemic. Sci. Data 2020, 7, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Rao, J.; Kang, Y.; Liang, Y.; Kruse, J.; Dopfer, D.; Sethi, A.K.; Reyes, J.F.M.; Yandell, B.S.; Patz, J.A. Association of Mobile Phone Location Data Indications of Travel and Stay-at-Home Mandates with COVID-19 Infection Rates in the US. JAMA Netw. Open 2020, 3, e2020485. [Google Scholar] [CrossRef] [PubMed]
- Pepe, E.; Bajardi, P.; Gauvin, L.; Privitera, F.; Lake, B.; Cattuto, C.; Tizzoni, M. COVID-19 outbreak response, a dataset to assess mobility changes in Italy following national lockdown. Sci. Data 2020, 7, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Badr, H.S.; Du, H.; Marshall, M.; Dong, E.; Squire, M.M.; Gardner, L. Association between mobility patterns and COVID-19 transmission in the USA: A mathematical modelling study. Lancet Infect. Dis. 2020, 20, 1247–1254. [Google Scholar] [CrossRef]
- Lin, Q.; Zhao, S.; Gao, D.; Lou, Y.; Yang, S.; Musa, S.S.; Wang, M.H.; Cai, Y.; Wang, W.; Yang, L.; et al. A conceptual model for the outbreak of Coronavirus disease 2019 (COVID-19) in Wuhan, China with individual reaction and governmental action. Int. J. Infect. Dis. 2020, 93, 211–2016. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Sha, D.; Liu, Q.; Li, Y.; Lan, H.; Guan, W.W.; Hu, T.; Li, Z.; Zhang, Z.; Thompson, J.H.; et al. Taking the pulse of COVID-19: A spatiotemporal perspective. Int. J. Digit. Earth 2020, 13, 1186–1211. [Google Scholar] [CrossRef]
- Lancet, T. India Under Lockdown. Lancet 2020, 395, 1315. [Google Scholar] [CrossRef]
- Bashir, M.F.; Ma, B.; Komal, B.; Bashir, M.A.; Tan, D. Correlation between climate indicators and COVID-19 pandemic in New York, USA. Sci. Total Environ. 2020, 728, 138835. [Google Scholar] [CrossRef]
- Bresnahan, P.C. Planet Dove Constellation Absolute Geolocation Accuracy, Geolocation Consistency, and Band Co-Registration Analysis. In Proceedings of the Joint Agency Commercial Imagery Evaluation (JACIE) Workshop, College Park, MD, USA, 19–21 September 2017. [Google Scholar]
- Barrington-Leigh, C.; Millard-Ball, A. The world’s user-generated road map is more than 80% complete. PLoS ONE 2017, 12, e0180698. [Google Scholar] [CrossRef]
- Koukoletsos, T.; Haklay, M.; Ellul, C. An automated method to assess data completeness and positional accuracy of OpenStreetMap. GeoComputation 2011, 3, 236–241. [Google Scholar]
- Helbich, M.; Amelunxen, C.; Neis, P.; Zipf, A. Comparative spatial analysis of positional accuracy of OpenStreetMap and proprietary geodata. Proc. GI_Forum. 2012, 4, 24. [Google Scholar]
- Liu, Q.; Liu, W.; Sha, D.; Kumar, S.; Chang, E.; Arora, V.; Lan, H.; Li, Y.; Wang, Z.; Zhang, Y.; et al. An Environmental Data Collection for COVID-19 Pandemic Research. Data 2020, 5, 68. [Google Scholar] [CrossRef]
- Piccardi, M. Background Subtraction Techniques: A Review. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics (IEEE Cat. No.04CH37583), Hague, The Netherlands, 10–13 October 2004; Volume 4, pp. 3099–3104. [Google Scholar] [CrossRef]
- Du, Y.; Teillet, P.M.; Cihlar, J. Radiometric Normalization of Multi-temporal High-Resolution Satellite Images with Quality Control for Land Cover Change Detection. Remote Sens. Environ. 2002, 82, 123–134. [Google Scholar] [CrossRef]
- Xu, Y.; Xie, Z.; Feng, Y.; Chen, Z. Road Extraction from High-Resolution Remote Sensing Imagery Using Deep Learning. Remote. Sens. 2018, 10, 1461. [Google Scholar] [CrossRef]
- Wan, T.; Lu, H.; Lu, Q.; Luo, N. Classification of high-resolution remote-sensing image using open street map information. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2305–2309. [Google Scholar] [CrossRef]
- Qin, R.; Fang, W. A Hierarchical Building Detection Method for Very High Resolution Remotely Sensed Images Combined with DSM Using Graph Cut Optimization. Photogramm. Eng. Remote. Sens. 2014, 80, 873–883. [Google Scholar] [CrossRef]
- Zhang, Q.; Qin, R.; Huang, X.; Fang, Y.; Liu, L. Classification of Ultra-High Resolution Orthophotos Combined with DSM Using a Dual Morphological Top Hat Profile. Remote. Sens. 2015, 7, 16422–16440. [Google Scholar] [CrossRef]
- Vincent, L. Morphological grayscale reconstruction in image analysis: Applications and efficient algorithms. IEEE Trans. Image Process. 1993, 2, 176–201. [Google Scholar] [CrossRef]
- Drouyer, S.; de Franchis, C. Highway Traffic Monitoring on Medium Resolution Satellite Images. In Proceedings of the IGARSS 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 1228–1231. [Google Scholar]
- Sujatha, C.; Selvathi, D. Connected component-based technique for automatic extraction of road centerline in high resolution satellite images. EURASIP J. Image Video Process. 2015, 2015, 4144. [Google Scholar] [CrossRef]
- Stehman, S.V. Selecting and interpreting measures of thematic classification accuracy. Remote. Sens. Environ. 1997, 62, 77–89. [Google Scholar] [CrossRef]
- Frey, B.B. Pearson Correlation Coefficient. In The SAGE Encyclopedia of Educational Research, Measurement, and Evaluation; Springer: Berlin, Germany, 2018; pp. 1–4. [Google Scholar]
- Sirkin, R. Statistics for the Social Sciences; SAGE Publications: Thousand Oaks, CA, USA, 2006. [Google Scholar]
- Zhou, H.; Gao, H. The impact of urban morphology on urban transportation mode: A case study of Tokyo. Case Stud. Transp. Policy 2020, 8, 197–205. [Google Scholar] [CrossRef]
- Chavhan, S.; Venkataram, P. Commuters’ traffic pattern and prediction analysis in a metropolitan area. J. Veh. Routing Algorithms 2017, 1, 33–46. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| City | Data Period | Area (km2) | Number of Blocks | Number Acquisitions (Days) | Average Temporal Coverage (Days) | Max/Min Interval (Days) |
|---|---|---|---|---|---|---|
| Wuhan | 11/1/2019–6/30/2020 | 305.67 | 4 | 36 | 6.7 | 29/1 |
| New York | 1/1/2020–9/30/2020 | 849.70 | 9 | 75 | 3.6 | 16/1 |
| New Delhi | 1/1/2020–9/30/2020 | 75.84 | 1 | 26 | 10.5 | 82/1 |
| Rome | 1/1/2020–9/30/2020 | 61.41 | 1 | 44 | 5.9 | 26/1 |
| Tokyo | 1/1/2020–9/30/2020 | 69.62 | 1 | 28 | 9.0 | 101/1 |
| Our Method | Drouyer and de Franchis’ Method [50] | ||||||
|---|---|---|---|---|---|---|---|
| Region Number | Date | Precision | Recall | F1 | Precision | Recall | F1 |
| 1 | 12/03/2019 | 70.00% | 82.35% | 75.68% | 25.00% | 41.67% | 31.25% |
| 2 | 04/16/2020 | 90.00% | 52.94% | 66.67% | 80.00% | 28.57% | 42.11% |
| 3 | 04/26/2020 | 77.78% | 77.78% | 77.78% | 88.89% | 61.54% | 72.73% |
| 4 | 01/12/2020 | 66.67% | 48.28% | 56.00% | 47.62% | 50.00% | 48.78% |
| 5 | 02/08/2020 | 76.19% | 55.17% | 64.00% | 57.14% | 50.00% | 53.33% |
| 6 | 05/29/2020 | 67.74% | 60.00% | 63.64% | 61.29% | 44.19% | 51.35% |
| 7 | 01/22/2020 | 80.00% | 68.97% | 74.07% | 72.00% | 90.00% | 80.00% |
| Average | 75.48% | 63.64% | 68.26% | 61.71% | 52.28% | 54.22% | |
| Cities | Number Satellite Scenes | PCC (TFII vs. GRSI) | PCC (TFII vs. NCC) |
|---|---|---|---|
| Wuhan | 98 | −0.3348 *** | −0.3350 *** |
| New York | 233 | −0.7534 *** | −0.5147 *** |
| Tokyo | 28 | 0.1874 * | 0.0700 |
| Rome | 44 | −0.4865 *** | −0.5010 *** |
| New Delhi | 26 | −0.8755 *** | −0.3448 *** |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Qin, R.; Zhang, G.; Albanwan, H. Spatial Temporal Analysis of Traffic Patterns during the COVID-19 Epidemic by Vehicle Detection Using Planet Remote-Sensing Satellite Images. Remote Sens. 2021, 13, 208. https://doi.org/10.3390/rs13020208
Chen Y, Qin R, Zhang G, Albanwan H. Spatial Temporal Analysis of Traffic Patterns during the COVID-19 Epidemic by Vehicle Detection Using Planet Remote-Sensing Satellite Images. Remote Sensing. 2021; 13(2):208. https://doi.org/10.3390/rs13020208
Chicago/Turabian StyleChen, Yulu, Rongjun Qin, Guixiang Zhang, and Hessah Albanwan. 2021. "Spatial Temporal Analysis of Traffic Patterns during the COVID-19 Epidemic by Vehicle Detection Using Planet Remote-Sensing Satellite Images" Remote Sensing 13, no. 2: 208. https://doi.org/10.3390/rs13020208
APA StyleChen, Y., Qin, R., Zhang, G., & Albanwan, H. (2021). Spatial Temporal Analysis of Traffic Patterns during the COVID-19 Epidemic by Vehicle Detection Using Planet Remote-Sensing Satellite Images. Remote Sensing, 13(2), 208. https://doi.org/10.3390/rs13020208