
Drone SAR Image Compression Based on Block Adaptive Compressive Sensing


Abstract
:1. Introduction
- An adaptive BCS method is employed to compress the magnitude of SAR images and reconstruct the original images through BCS recovery techniques. The measurement ratio for each block is initially computed by using the sparsity of coefficients in the dualtreee DWT (DDWT) domain, and a new algorithm is proposed to select the best block measurement ratio for the proposed clustered BCS with quantized measurement ratios. This approach improves the compression efficiency of SAR images while reducing the side information to inform the measurement matrices from the remote sensing node to the ground station reconstructing SAR images.
- Considering the variable measurement ratios across blocks, a new clustered BCS recovery structure is devised through some modification of the iterative thresholding algorithm (ITA) combined with DDWT [50]. The compressed blocks with the same measurement ratio are gathered into a cluster and reconstructed using the common measurement matrix, and thus the computational complexity is significantly reduced compared to the conventional adaptive BCS scheme. The best number of measurement matrices is suggested through the tradeoff between reconstructed image quality and complexity.
- To optimize the parameters and evaluate the performance of the proposed method, we use the real SAR images provided by Sandia National Lab., Radar ISR [51] and experimental data obtained by self-made drone SAR and vehicular SAR systems. Numerical simulations show that the proposed technique is more beneficial to SAR image compression than conventional schemes such as the BCS with fixed measurement rate and the variance-based adaptive BCS.
2. Previous Works Related to SAR Imaging and BCS
2.1. SAR Image Formation
2.2. BCS-Based Image Compression
2.3. Reconstruction by BCS-SPL with Fixed Measurement Ratio
2.4. Fully Adaptive BCS and Blockwise Image Reconstruction
3. Proposed Clustered BCS with Quantized Measurement Ratio
3.1. Selection of Measurement Ratio
- Compute the ratio of nonzero elements:
- Quantize with parameter :
- Remove the bias in :
- Compute the block measurement ratio by scaling :where and are given by
3.2. SAR Image Compression Using Quantized Measurement Ratio
- is a subsampling matrix where . can be generated by randomly selecting rows of . This matrix selects a random subset of rows of .
- is an orthogonal transform matrix. In the proposed method, is defined as the inverse DCT matrix. This matrix is used to spread the SAR image information over all measurements.
- is a random permutation matrix for scrambling the signal locations. This matrix is also called the global randomizer.
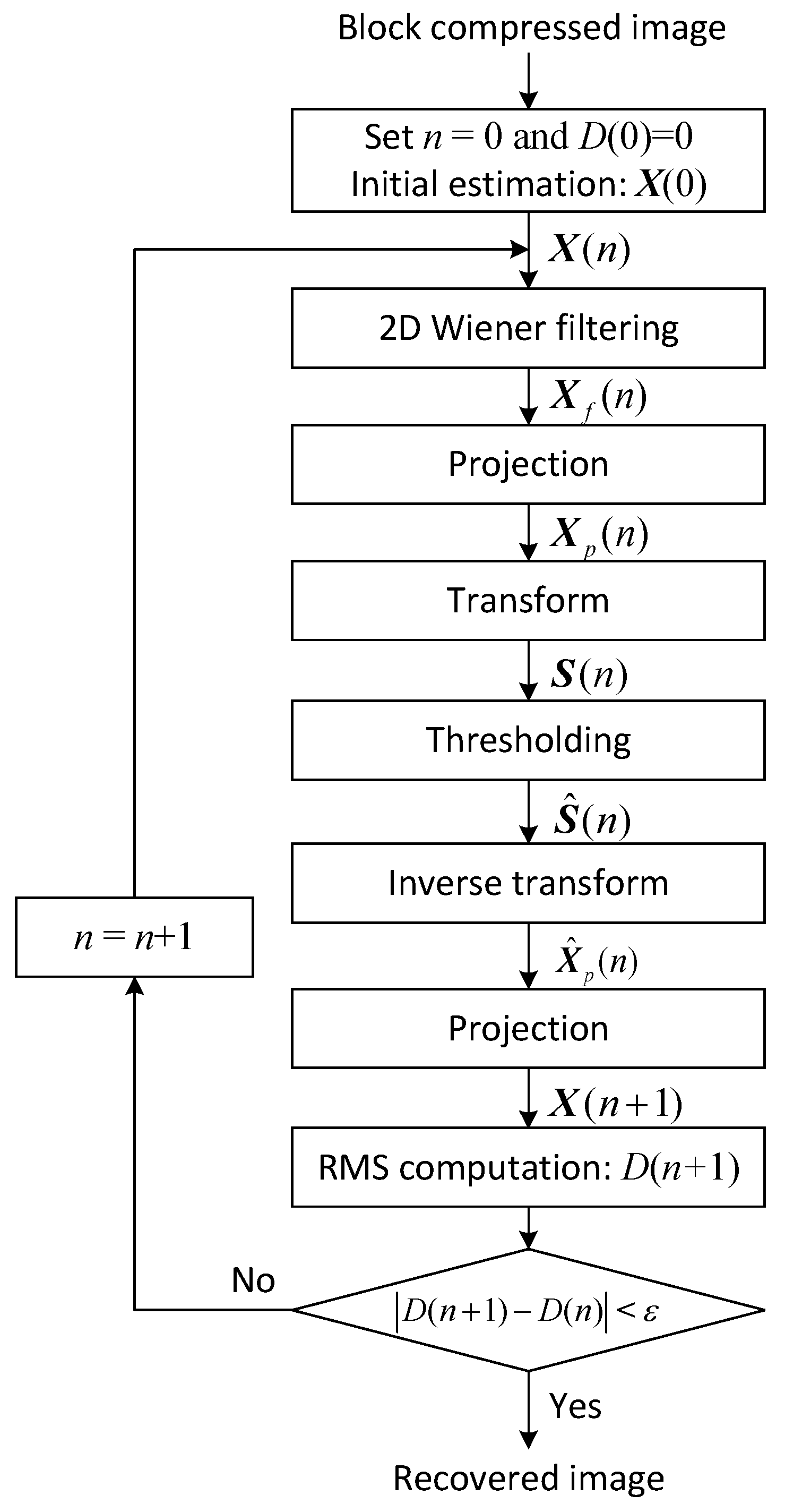
3.3. SAR Image Reconstruction Using Clustered BCS Algorithm
4. Measurement for SAR Imaging
5. Simulation Results
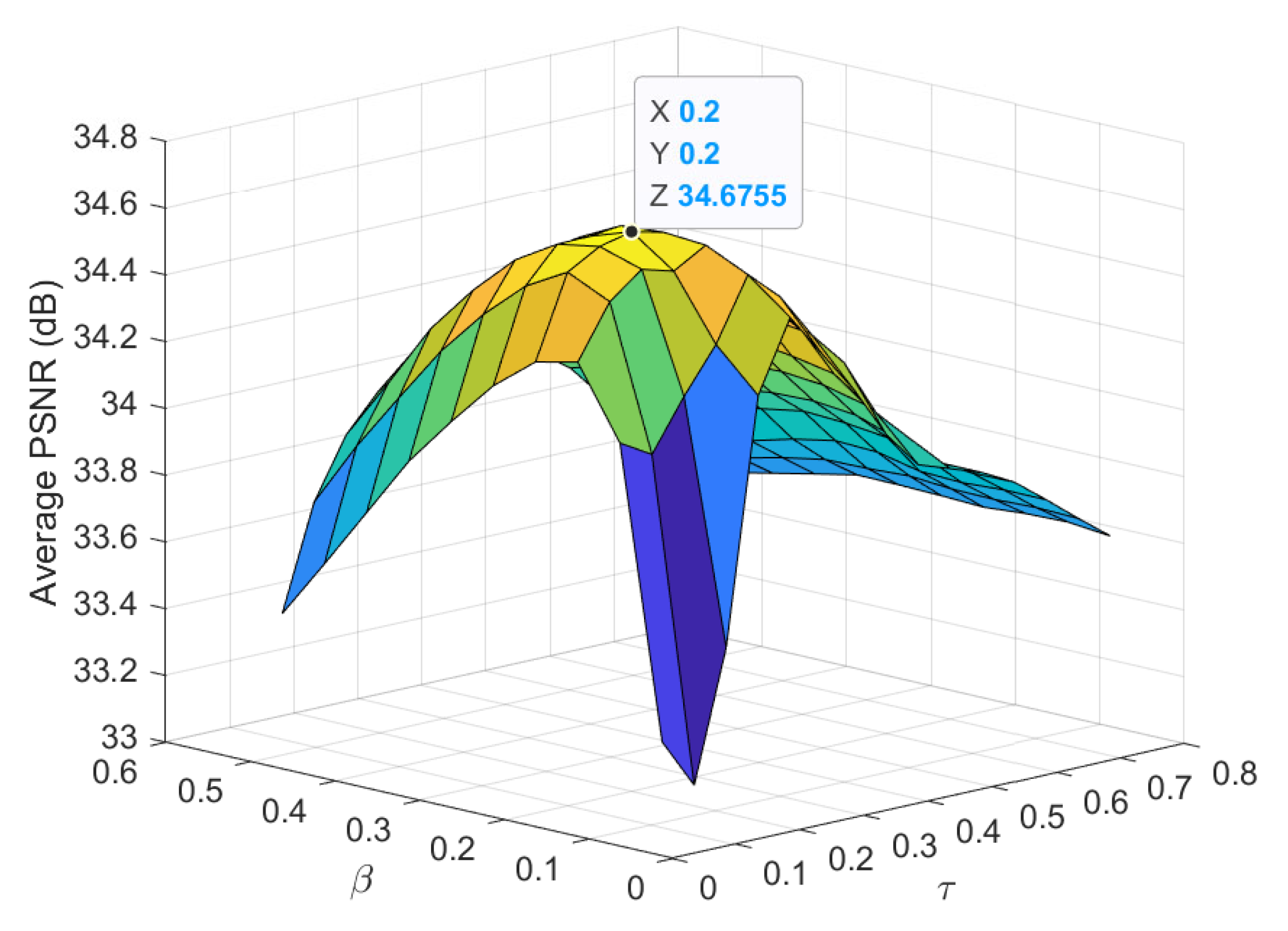
5.1. Parameter Optimization for Proposed Clustered BCS
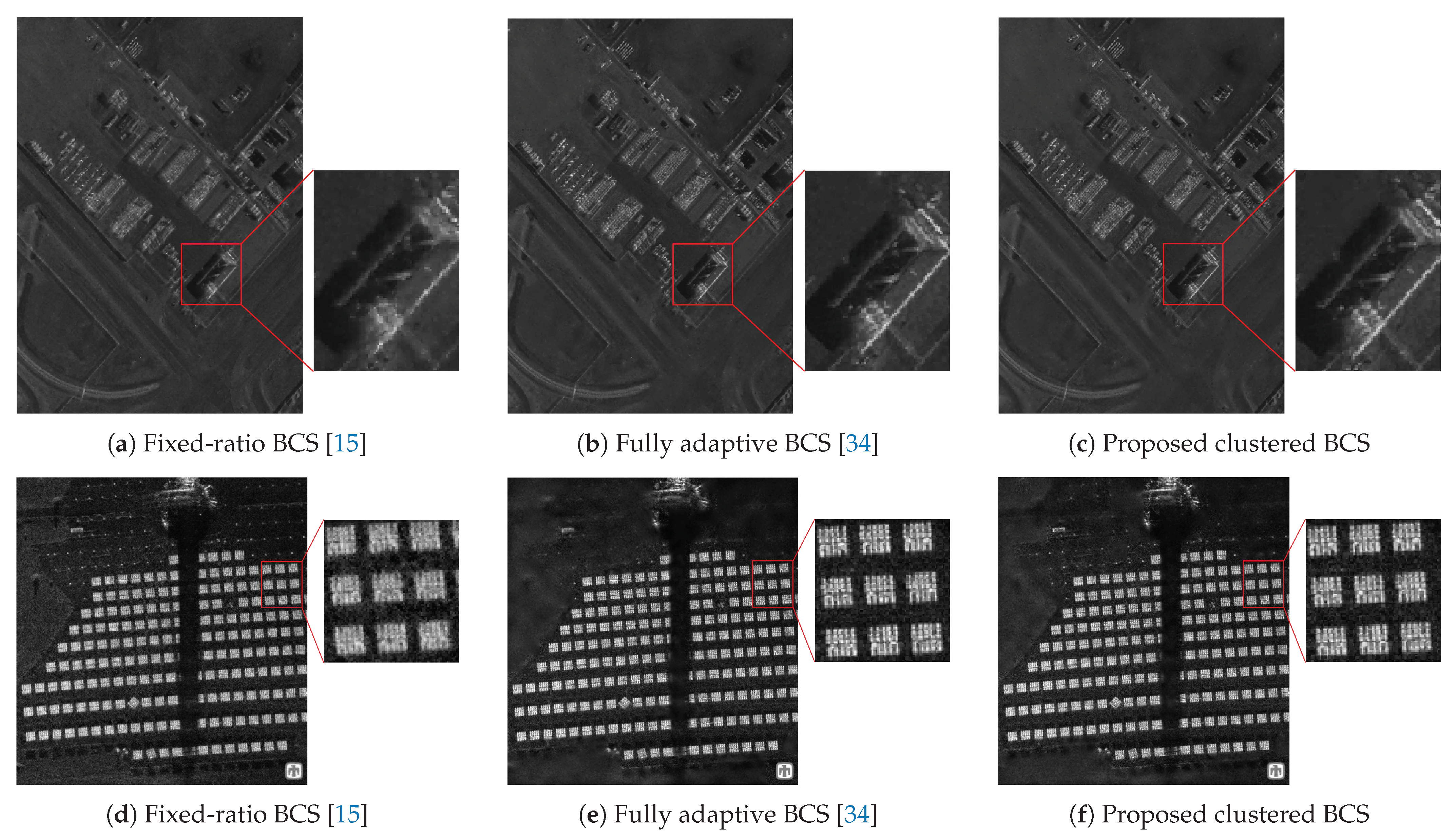
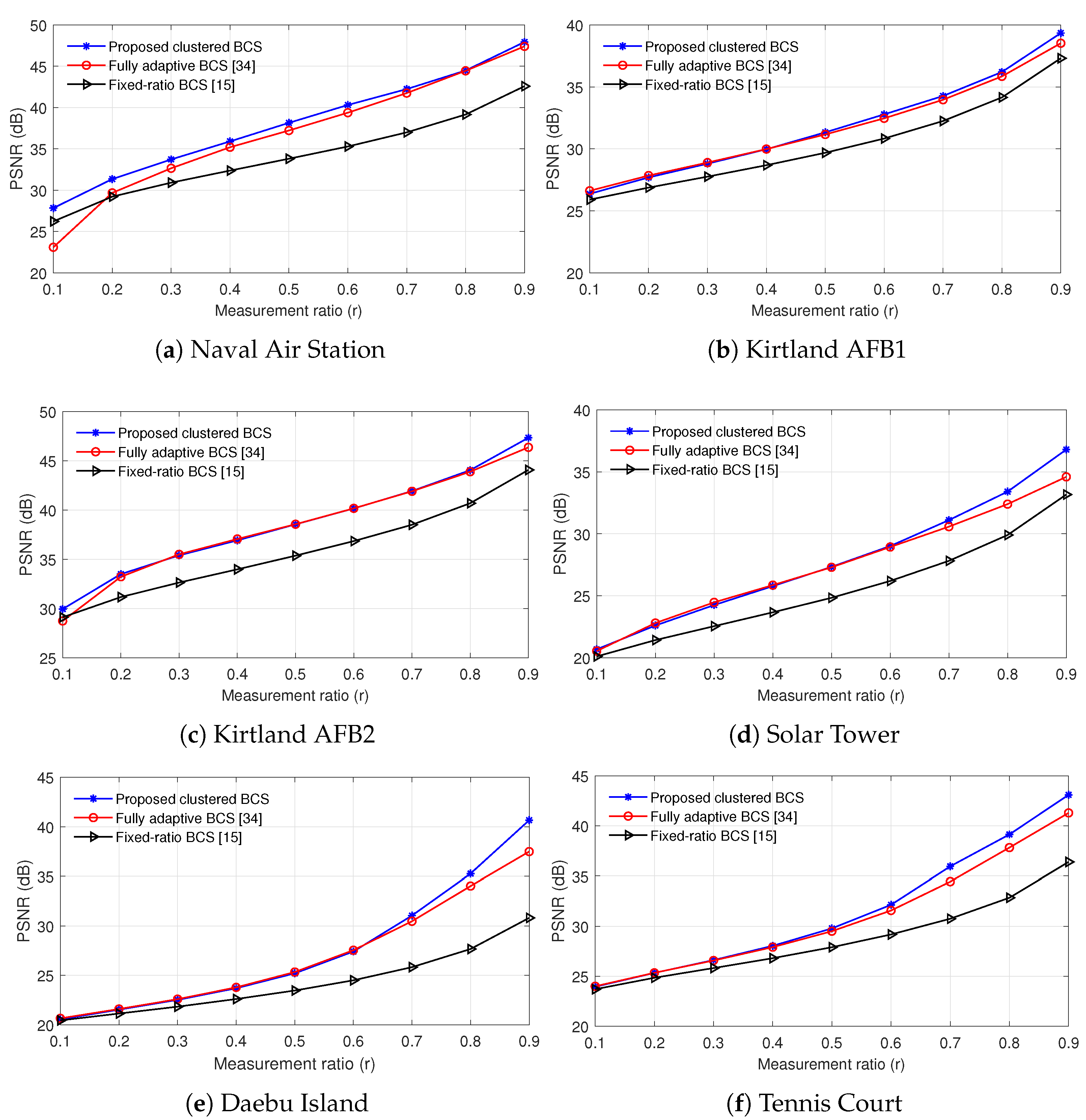
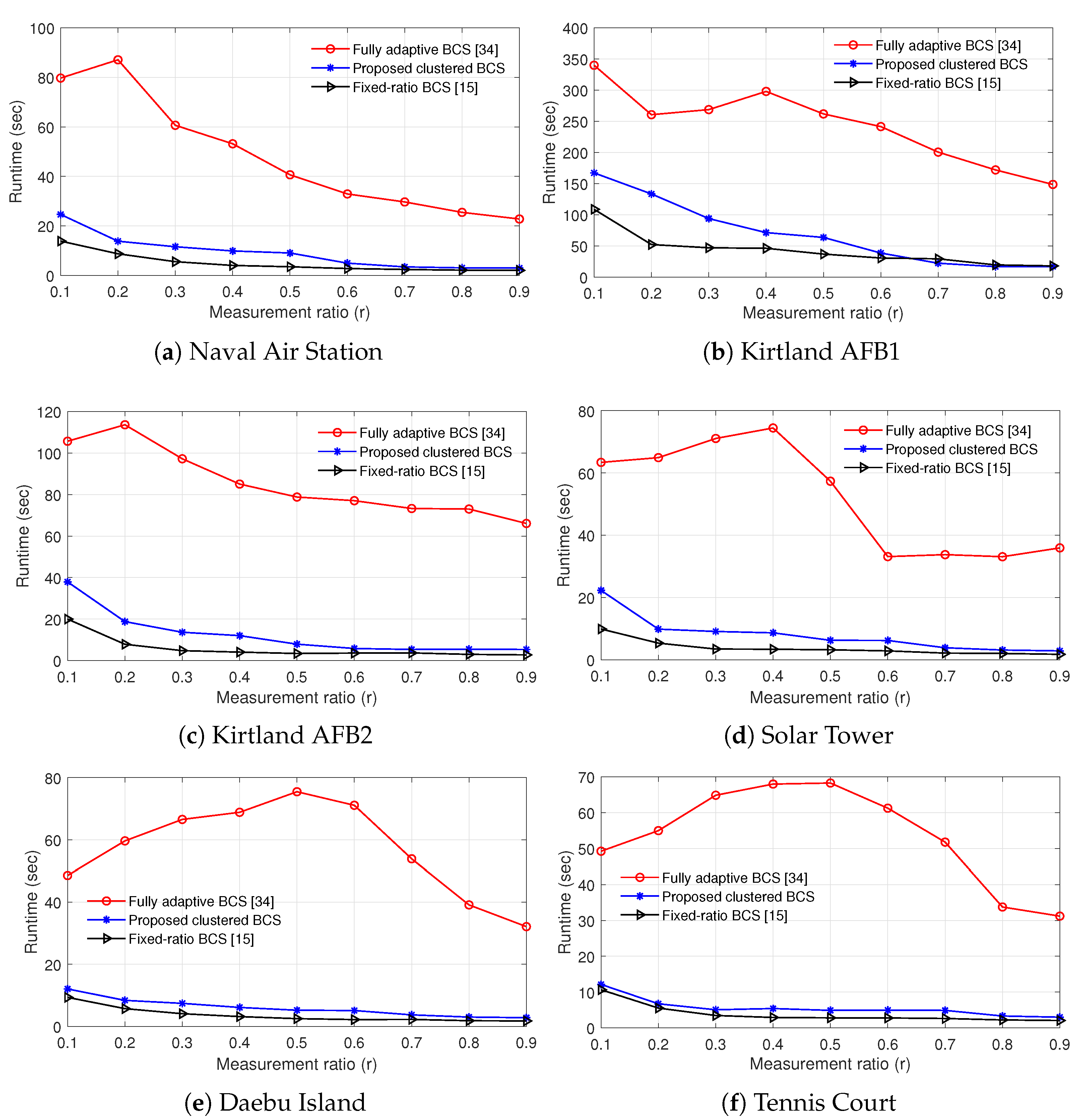
5.2. Reconstructed Image Performance and Runtime
- Fixed-ratio BCS: the method in [15] is used. All blocks are compressed with the same measurement ratio, and SAR images are reconstructed by the BCS-SPL in Section 2.3.
- Fully adaptive BCS: the method in [34] is used. Block measurement ratios are assigned according to block variances in the image-domain, and SAR images are reconstructed by separately applying the BCS-SPL to each block as explained in Section 2.4. The minimum block measurement ratio is set to 0.001 to avoid the numerical instability in the BCS-SPL algorithm.
- Proposed clustered BCS: The block measurement ratio is adaptively assigned with quantization using the procedure in Section 3.1, the original image is compressed as explained in Section 3.2, and the SAR image is reconstructed by the proposed clustered BCS in Section 3.3. The parameters are set as , , and , and the random sampling matrices are defined as (26), unless otherwise specified.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candes, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef] [Green Version]
- Candes, E.J.; Tao, T. Near-Optimal Signal Recovery From Random Projections: Universal Encoding Strategies? IEEE Trans. Inf. Theory 2006, 52, 5406–5425. [Google Scholar] [CrossRef] [Green Version]
- Haupt, J.; Nowak, R. Signal Reconstruction From Noisy Random Projections. IEEE Trans. Inf. Theory 2006, 52, 4036–4048. [Google Scholar] [CrossRef]
- Gill, P.R.; Wang, A.; Molnar, A. The In-Crowd Algorithm for Fast Basis Pursuit Denoising. IEEE Trans. Signal Process. 2011, 59, 4595–4605. [Google Scholar] [CrossRef]
- Quan, X.; Zhao, X.; Yang, J.; Xie, X.; Bao, W.; Zhang, B.; Wu, Y. 3-D Scattering Center Extraction Based on BPDN for Complex Radar Targets. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Yokohama, Japan, 28 July–2 August 2019; pp. 3756–3759. [Google Scholar] [CrossRef]
- Cai, T.T.; Wang, L. Orthogonal Matching Pursuit for Sparse Signal Recovery With Noise. IEEE Trans. Inf. Theory 2011, 57, 4680–4688. [Google Scholar] [CrossRef]
- Needell, D.; Vershynin, R. Signal Recovery From Incomplete and Inaccurate Measurements Via Regularized Orthogonal Matching Pursuit. IEEE J. Sel. Top. Signal Process. 2010, 4, 310–316. [Google Scholar] [CrossRef] [Green Version]
- Needell, D.; Tropp, J. CoSaMP: Iterative signal recovery from incomplete and inaccurate samples. Appl. Comput. Harmon. Anal. 2008, 26, 301–321. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L.; Tsaig, Y.; Drori, I.; Starck, J. Sparse Solution of Underdetermined Systems of Linear Equations by Stagewise Orthogonal Matching Pursuit. IEEE Trans. Inf. Theory 2012, 58, 1094–1121. [Google Scholar] [CrossRef]
- Wang, J.; Kwon, S.; Li, P.; Shim, B. Recovery of Sparse Signals via Generalized Orthogonal Matching Pursuit: A New Analysis. IEEE Trans. Signal Process. 2016, 64, 1076–1089. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L.; Maleki, A.; Montanari, A. Message passing algorithms for compressed sensing: I. motivation and construction. In Proceedings of the 2010 IEEE Information Theory Workshop on Information Theory (ITW), Cairo, Egypt, 6–8 January 2010; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L.; Maleki, A.; Montanari, A. Message passing algorithms for compressed sensing: II. analysis and validation. In Proceedings of the 2010 IEEE Information Theory Workshop on Information Theory (ITW), Cairo, Egypt, 6–8 January 2010; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Gan, L. Block Compressed Sensing of Natural Images. In Proceedings of the 15th International Conference on Digital Signal Processing (ICDSP), Cardiff, UK, 1–4 July 2007; pp. 403–406. [Google Scholar] [CrossRef]
- Mun, S.; Fowler, J.E. Block Compressed Sensing of Images Using Directional Transforms. In Proceedings of the 16th IEEE International Conference on Image Processing (ICIP), Cairo, Egypt, 7–10 November 2010; p. 547. [Google Scholar] [CrossRef]
- Fowler, J.E.; Mun, S.; Tramel, E.W. Multiscale block compressed sensing with smoothed projected Landweber reconstruction. In Proceedings of the 19th European Signal Processing Conference (EUSIPCO), Barcelona, Spain, 29 August–2 September 2011; pp. 564–568. [Google Scholar]
- Unde, A.S.; Deepthi, P. Block compressive sensing: Individual and joint reconstruction of correlated images. J. Vis. Commun. Image R. 2017, 44, 187–197. [Google Scholar] [CrossRef]
- Shi, C.; Wang, L.; Zhang, J.; Miao, F.; He, P. Remote Sensing Image Compression Based on Direction Lifting-Based Block Transform with Content-Driven Quadtree Coding Adaptively. Remote Sens. 2018, 10, 999. [Google Scholar] [CrossRef] [Green Version]
- Sendur, L.; Selesnick, I.W. Bivariate shrinkage functions for wavelet-based denoising exploiting interscale dependency. IEEE Trans. Signal Process. 2002, 50, 2744–2756. [Google Scholar] [CrossRef] [Green Version]
- Hubbard-Featherstone, C.J.; Garcia, M.A.; Lee, W.Y.L. Adaptive block compressive sensing for image compression. In Proceedings of the 2017 International Conference on Image and Vision Computing New Zealand (IVCNZ), Christchurch, New Zealand, 4–6 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, W.; Shen, Q. Adaptive Algorithm on Block-Compressive Sensing and Noisy Data Estimation. Electronics 2019, 8, 753. [Google Scholar] [CrossRef] [Green Version]
- Rilling, G.; Davies, M.; Mulgrew, B. Compressed sensing based compression of SAR raw data. In Proceedings of the SPARS’09—Signal Processing with Adaptive Sparse Structured Representations, Saint-Malo, France, 6–9 April 2009; pp. 1–6. [Google Scholar]
- Boufounos, P.T. Universal Quantization and SAR Compression; Technical Report; Mitsubishi Electric Research Laboratories, Inc.: Cambridge, MA, USA, 2019. [Google Scholar]
- Yang, H.; Chen, C.; Chen, S.; Xi, F. Sub-Nyquist SAR via Quadrature Compressive Sampling with Independent Measurements. Remote Sens. 2019, 11, 472. [Google Scholar] [CrossRef] [Green Version]
- Samadi, S.; Çetin, M.; Masnadi-Shirazi, M.A. Sparse Representation-Based Synthetic Aperture Radar Imaging. IET Radar Sonar Navig. 2011, 5, 182–193. [Google Scholar] [CrossRef] [Green Version]
- Fang, J.; Xu, Z.; Zhang, B.; Hong, W.; Wu, Y. Fast Compressed Sensing SAR Imaging Based on Approximated Observation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 352–363. [Google Scholar] [CrossRef] [Green Version]
- Ao, D.; Wang, R.; Hu, C.; Li, Y. A Sparse SAR Imaging Method Based on Multiple Measurement Vectors Model. Remote Sens. 2017, 9, 297. [Google Scholar] [CrossRef] [Green Version]
- Liang, L.; Li, X.; Ferro-Famil, L.; Guo, H.; Zhang, L.; Wu, W. Urban Area Tomography Using a Sparse Representation Based Two-Dimensional Spectral Analysis Technique. Remote Sens. 2018, 10, 109. [Google Scholar] [CrossRef] [Green Version]
- Luo, H.; Li, Z.; Dong, Z.; Yu, A.; Zhang, Y.; Zhu, X. Super-Resolved Multiple Scatterers Detection in SAR Tomography Based on Compressive Sensing Generalized Likelihood Ratio Test (CS-GLRT). Remote Sens. 2019, 11, 1930. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.; Zhang, Z.; Chen, L.; Yu, W. Super-Resolution for MIMO Array SAR 3-D Imaging Based on Compressive Sensing and Deep Neural Network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3109–3124. [Google Scholar] [CrossRef]
- Hu, X.; Ma, C.; Lu, X.; Yeo, T.S. Compressive Sensing SAR Imaging Algorithm for LFMCW Systems. IEEE Trans. Geosci. Remote Sens. 2021, 1–15. [Google Scholar] [CrossRef]
- Pu, W.; Wu, J.; Wang, X.; Huang, Y.; Zha, Y.; Yang, J. Joint Sparsity-Based Imaging and Motion Error Estimation for BFSAR. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1393–1408. [Google Scholar] [CrossRef]
- Pu, W.; Huang, Y.; Wu, J.; Yang, H.; Yang, J. Fast Compressive Sensing-Based SAR Imaging Integrated With Motion Compensation. IEEE Access 2019, 7, 53284–53295. [Google Scholar] [CrossRef]
- Wang, N.; Li, J. Block adaptive compressed sensing of SAR images based on statistical character. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 640–643. [Google Scholar] [CrossRef]
- Rouabah, S.; Ouarzeddine, M.; Souissi, B. SAR Images Compressed Sensing Based on Recovery Algorithms. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Valencia, Spain, 22–27 July 2018; pp. 8897–8900. [Google Scholar] [CrossRef]
- Hoshino, T.; Suwa, K.; Yokota, Y.; Hara, T. Experimental Study of Compressive Sensing for Synthetic Aperture Radar on Sub-Nyquist Linearly Decimated Array. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium fooyellowfoo(IGARSS), Yokohama, Japan, 28 July–2 August 2019; pp. 831–834. [Google Scholar] [CrossRef]
- Jung, D.; Kang, H.; Kim, C.; Park, J.; Park, S. Sparse Scene Recovery for High-Resolution Automobile FMCW SAR via Scaled Compressed Sensing. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10136–10146. [Google Scholar] [CrossRef]
- Ahmed, M.M.; Bedour, H.; Hassan, S.M. FPGA Implementation of an ImageCompression and Reconstruction System for the Onboard Radar Using the Compressive Sensing. In Proceedings of the 2019 14th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 17 December 2019; pp. 163–168. [Google Scholar] [CrossRef]
- Yang, Y.; Jin, T.; Xiao, C.; Huang, X. Compressed Sensing Radar Imaging: Fundamentals, Challenges, and Advances. Sensors 2019, 19, 3100. [Google Scholar] [CrossRef] [Green Version]
- Fernández, M.G.; Álvarez López, Y.; Arboleya, A.A.; Valdés, B.G.; Vaqueiro, Y.R.; Andrés, F.L.H.; García, A.P. Synthetic Aperture Radar Imaging System for Landmine Detection Using a Ground Penetrating Radar on Board a Unmanned Aerial Vehicle. IEEE Access 2018, 6, 45100–45112. [Google Scholar] [CrossRef]
- Schartel, M.; Burr, R.; Mayer, W.; Docci, N.; Waldschmidt, C. UAV-Based Ground Penetrating Synthetic Aperture Radar. In Proceedings of the 2018 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Munich, Germany, 15–17 April 2018; pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Zhu, D. High-resolution miniature UAV SAR imaging based on GPU Architecture. IOP J. Phys. Conf. Ser. 2018, 1074, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.; Yang, B.; Gao, Y.; Tao, L.; Liu, X. SAR image compression using optronic processing. IET J. Eng. 2019, 2019, 5982–5985. [Google Scholar] [CrossRef]
- Brandfass, M.; Coster, W.; Benz, U.; Moreira, A. Wavelet based approaches for efficient compression of complex SAR image data. In Proceedings of the 1997 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Singapore, 3–8 August 1997; Volume 4, pp. 2024–2027. [Google Scholar] [CrossRef]
- Zeng, Z.; Cumming, I.G. SAR image data compression using a tree-structured wavelet transform. IEEE Trans. Geosci. Remote Sens. 2001, 39, 546–552. [Google Scholar] [CrossRef] [Green Version]
- Hou, X.; Liu, G.; Zou, Y. SAR image data compression using wavelet packet transform and universal-trellis coded quantization. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2632–2641. [Google Scholar] [CrossRef]
- Hou, X.; Yang, J.; Jiang, G.; Qian, X. Complex SAR Image Compression Based on Directional Lifting Wavelet Transform With High Clustering Capability. IEEE Trans. Geosci. Remote Sens. 2013, 51, 527–538. [Google Scholar] [CrossRef]
- Hou, X.; Han, M.; Gong, C.; Qian, X. SAR complex image data compression based on quadtree and zerotree Coding in Discrete Wavelet Transform Domain: A Comparative Study. Neurocomputing 2014, 148, 561–568. [Google Scholar] [CrossRef]
- Ji, X.; Zhang, G. An adaptive SAR image compression method. Comput. Elect. Eng. 2016, 62, 473–484. [Google Scholar] [CrossRef]
- Kingsbury, N.G. Complex Wavelets for Shift Invariant Analysis and Filtering of Signals. Appl. Comput. Harmon. Anal. 2001, 10, 234–253. [Google Scholar] [CrossRef] [Green Version]
- Sandia National Laboratories. Adaptive Block Compressive Sensing: Toward a Real-Time and Low-Complexity Implementation. Available online: https://www.sandia.gov/radar/ (accessed on 30 June 2020). [CrossRef]
- Do, T.T.; Gan, L.; Nguyen, N.H.; Tran, T.D. Fast and Efficient Compressive Sensing Using Structurally Random Matrices. IEEE Trans. Signal Process. 2012, 60, 139–154. [Google Scholar] [CrossRef] [Green Version]
- Veeramachaneni, D. Implementation of Compressive Sensing Algorithms on Arm Cortex Processor and FPGAs. Electrical. Engineering Thesis, The University of Texas at Tyler, Tyler, TX, USA, 2015. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Drone SAR | Vehicular SAR |
|---|---|---|
| Waveform | FMCW | FMCW |
| Carrier frequency | 5.6 GHz | 9.5 GHz |
| Bandwidth | 800 MHz | 1.0 GHz |
| Velocity | 3.0 m/s | 7.45 m/s |
| Pulse repetition frequency | 125 Hz | 125 Hz |
| No. | Image Name | Size (pixels) | Description |
|---|---|---|---|
| 1 | Naval Air Station | Ku-Band, Spotdwell image, Jacksonville Naval Air Station | |
| 2 | Kirtland AFB1 | Ku-Band, high-resolution image, buildings at Kirtland AFB | |
| 3 | Kirtland AFB2 | Spotlight SAR image, reapplication yard at Kirtland AFB | |
| 4 | Solar Tower | Lynx SAR image, solar tower near Albuquerque | |
| 5 | Daebu Island | Drone SAR image, Daebu Island, South Korea | |
| 6 | Tennis Court | Vehicular SAR image, tennis court at Korea Aerospace Univ. |
| Image Name | r | Fixed-Ratio BCS [15] | Fully Adaptive BCS [34] | Proposed Method | |||
|---|---|---|---|---|---|---|---|
| (dB) | (dB) | (dB) | (dB) | (dB) | (dB) | ||
| Naval Air Station | 30.908 | 0.0276 | 32.649 | 0.0799 | 33.719 | 0.0999 | |
| 33.804 | 0.0181 | 37.221 | 0.0181 | 38.149 | 0.0501 | ||
| 36.994 | 0.0234 | 41.752 | 0.0214 | 42.235 | 0.0283 | ||
| Kirtland AFB1 | 27.756 | 0.0125 | 28.894 | 0.0032 | 28.800 | 0.0065 | |
| 29.683 | 0.0054 | 31.161 | 0.0029 | 31.332 | 0.0026 | ||
| 32.247 | 0.0078 | 33.961 | 0.0046 | 34.266 | 0.0036 | ||
| Kirtland AFB2 | 32.641 | 0.0475 | 35.486 | 0.0200 | 35.394 | 0.0240 | |
| 35.386 | 0.0298 | 38.577 | 0.0166 | 38.540 | 0.0391 | ||
| 38.528 | 0.0474 | 41.909 | 0.0152 | 41.902 | 0.0027 | ||
| Solar Tower | 22.549 | 0.0257 | 24.472 | 0.0262 | 24.253 | 0.0396 | |
| 24.838 | 0.0380 | 27.301 | 0.0210 | 27.337 | 0.0157 | ||
| 27.821 | 0.0469 | 30.581 | 0.0060 | 31.107 | 0.0102 | ||
| Daebu Island | 21.829 | 0.0082 | 22.590 | 0.0037 | 22.514 | 0.0066 | |
| 23.463 | 0.0094 | 25.335 | 0.0134 | 25.202 | 0.0216 | ||
| 25.828 | 0.0151 | 30.472 | 0.0141 | 30.942 | 0.0072 | ||
| Tennis Court | 25.819 | 0.0301 | 26.573 | 0.0093 | 26.615 | 0.0210 | |
| 27.900 | 0.0121 | 29.502 | 0.0213 | 29.783 | 0.0282 | ||
| 30.750 | 0.0161 | 34.441 | 0.0218 | 35.953 | 0.0270 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, J.; Lee, W. Drone SAR Image Compression Based on Block Adaptive Compressive Sensing. Remote Sens. 2021, 13, 3947. https://doi.org/10.3390/rs13193947
Choi J, Lee W. Drone SAR Image Compression Based on Block Adaptive Compressive Sensing. Remote Sensing. 2021; 13(19):3947. https://doi.org/10.3390/rs13193947
Chicago/Turabian StyleChoi, Jihoon, and Wookyung Lee. 2021. "Drone SAR Image Compression Based on Block Adaptive Compressive Sensing" Remote Sensing 13, no. 19: 3947. https://doi.org/10.3390/rs13193947
APA StyleChoi, J., & Lee, W. (2021). Drone SAR Image Compression Based on Block Adaptive Compressive Sensing. Remote Sensing, 13(19), 3947. https://doi.org/10.3390/rs13193947