
Camouflaged Target Detection Based on Snapshot Multispectral Imaging


Abstract
:1. Introduction
2. Methodology
2.1. Calibration
2.2. CEM Detector
2.3. Improved OTSU Algorithm (t-OTSU)
2.4. Object Region Extraction (ORE)
2.5. Evaluation Metrics
3. Results
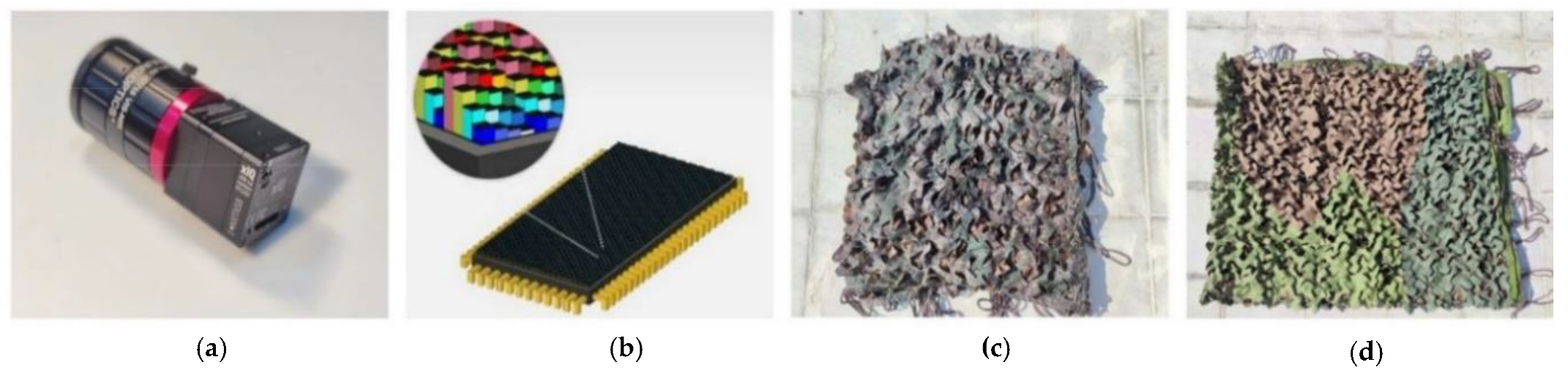
3.1. Experimental Scenarios
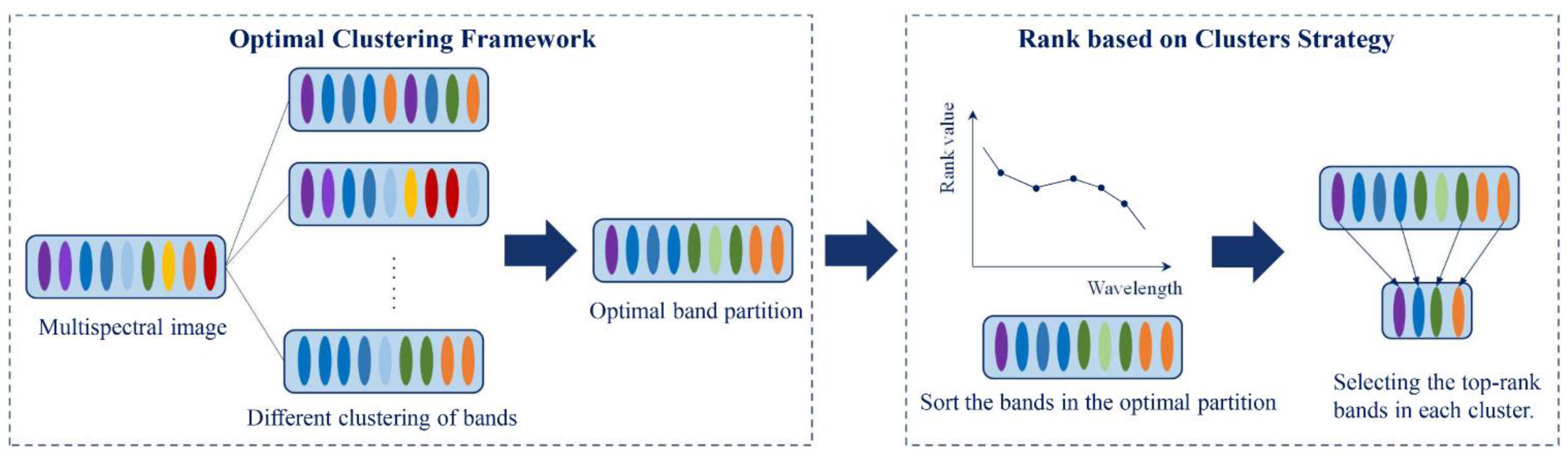
3.2. Results of the Band Selection
3.3. Compared Methods
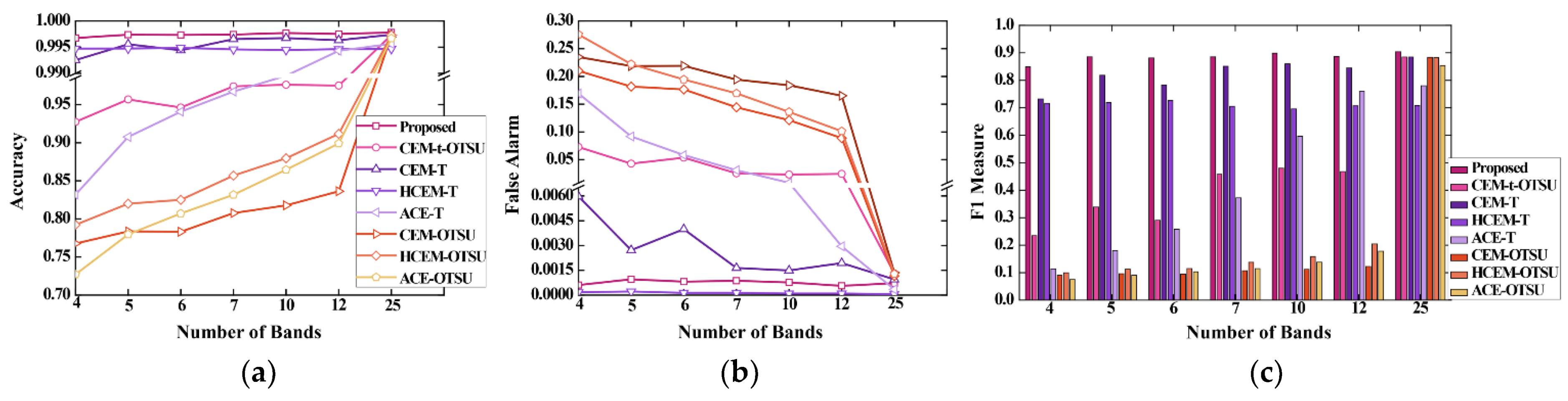
3.4. Experimental Results with the Lawn Scene
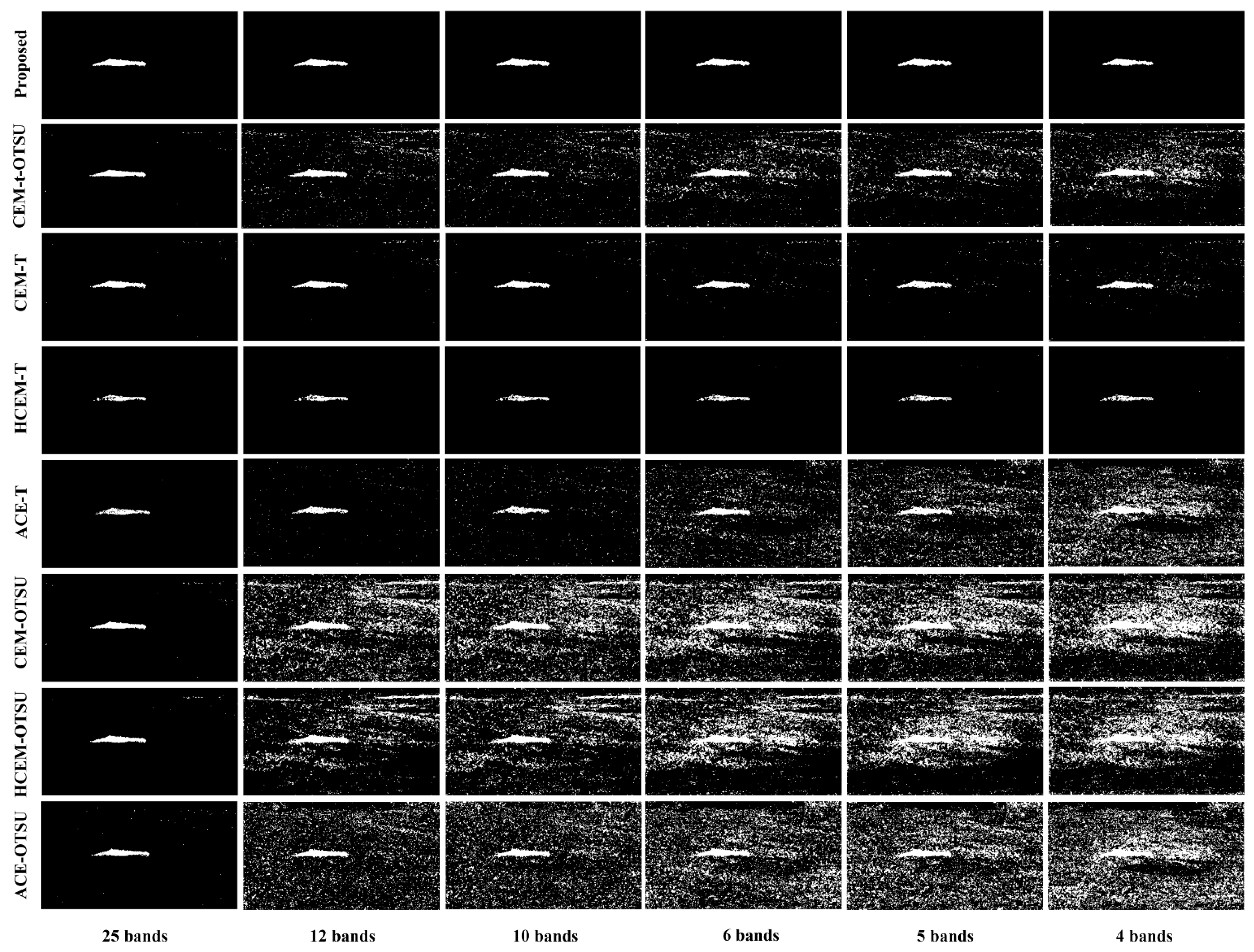
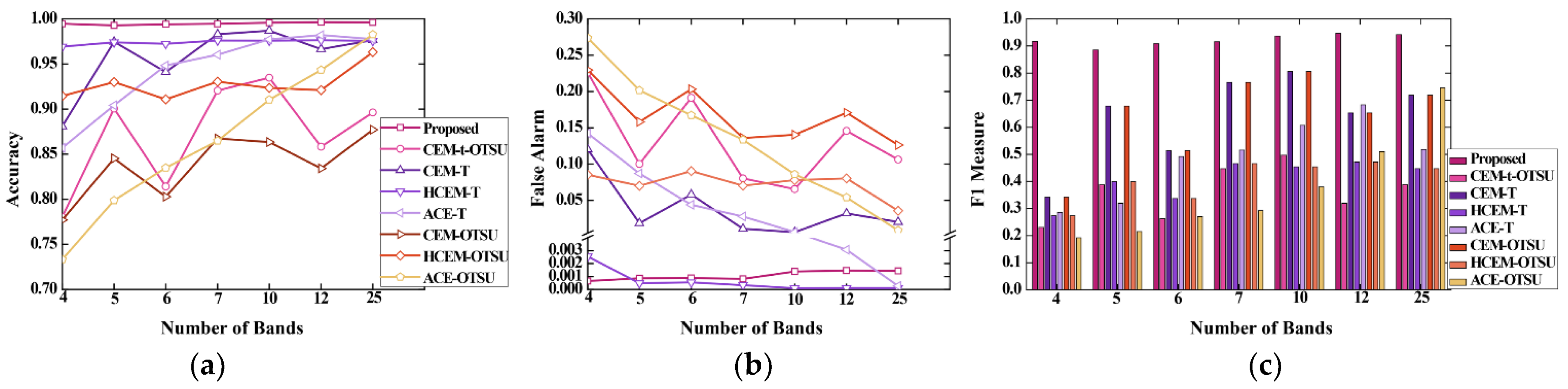
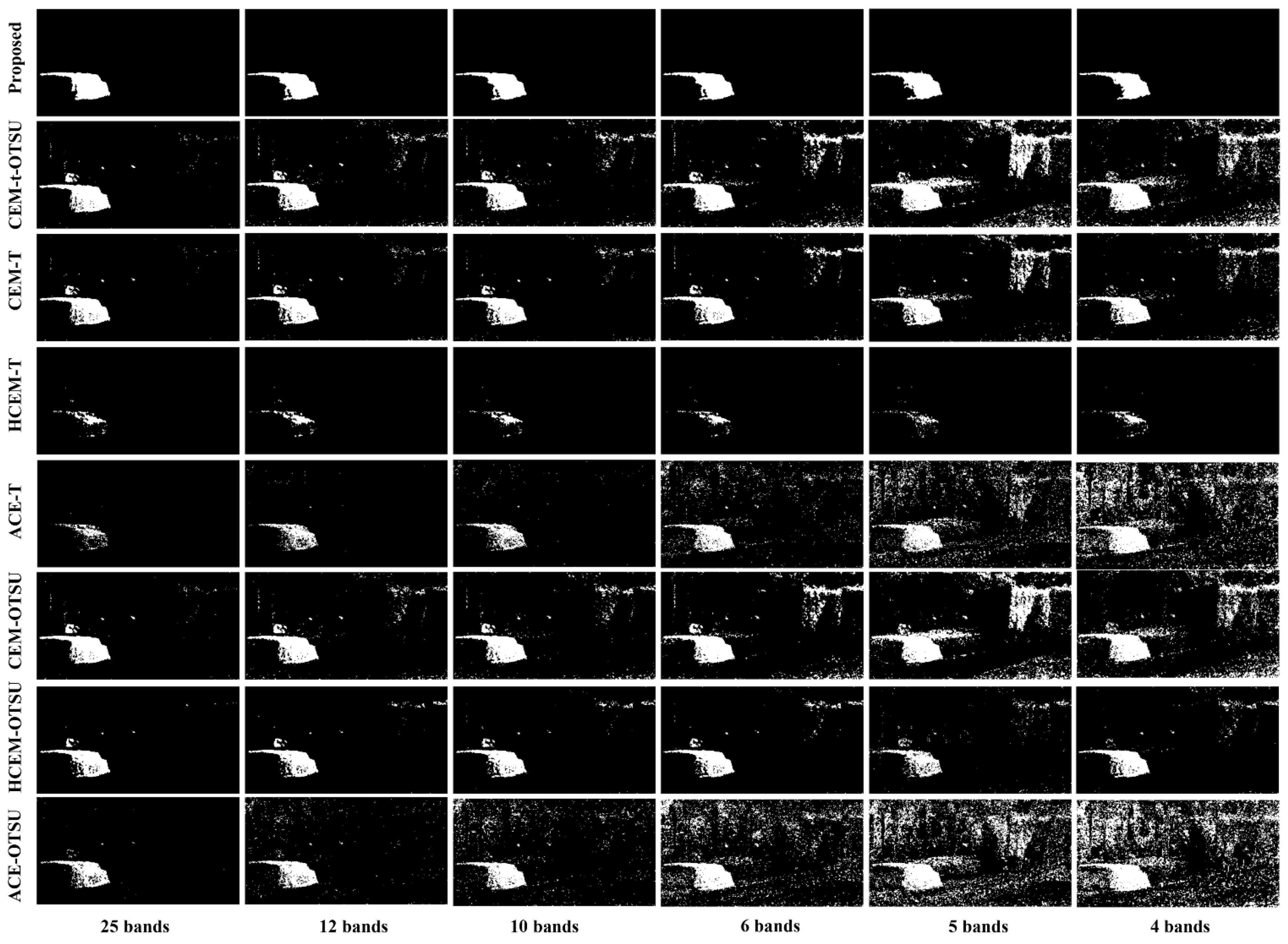
3.5. Experimental Results in the BT Scene
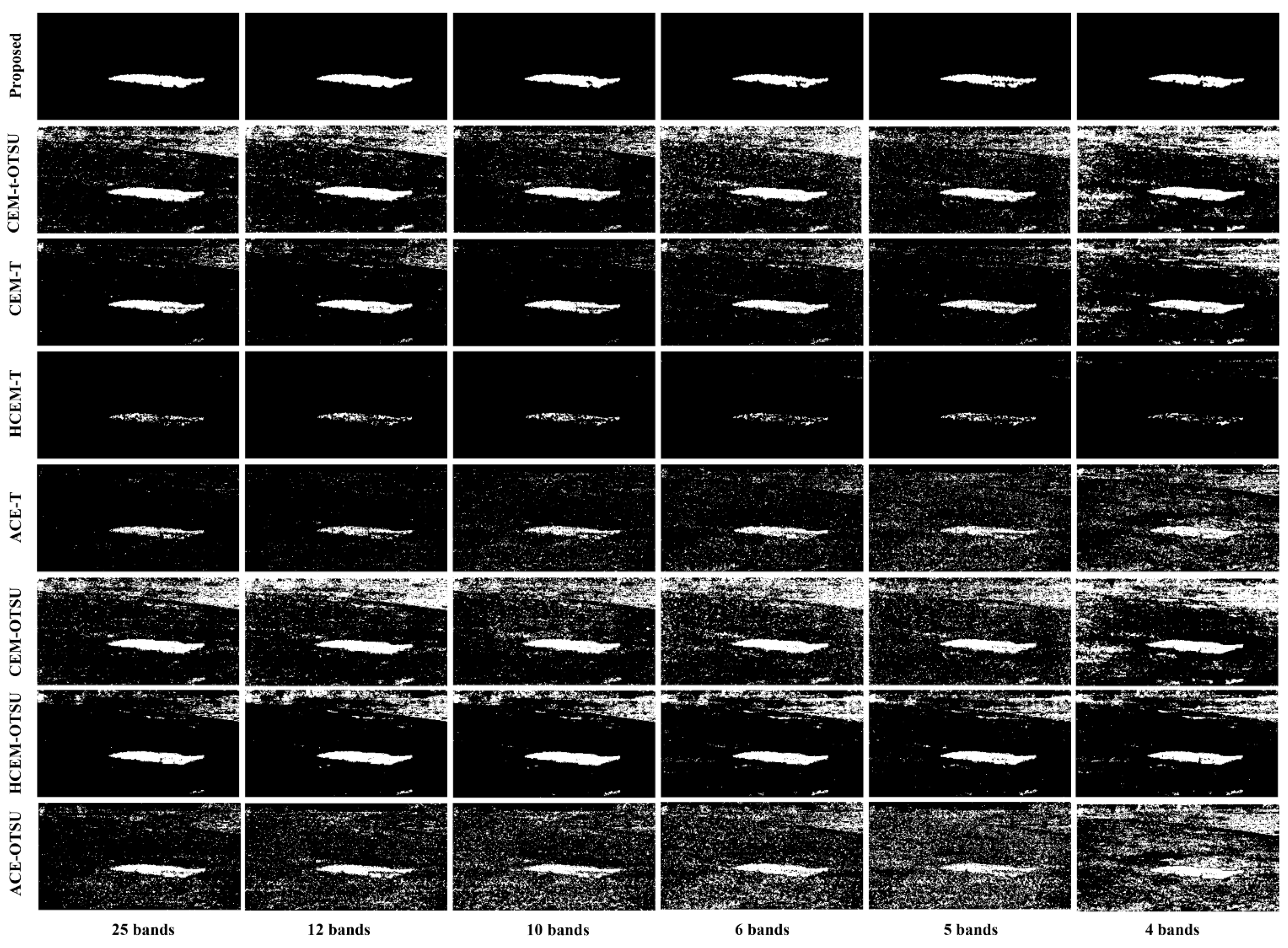
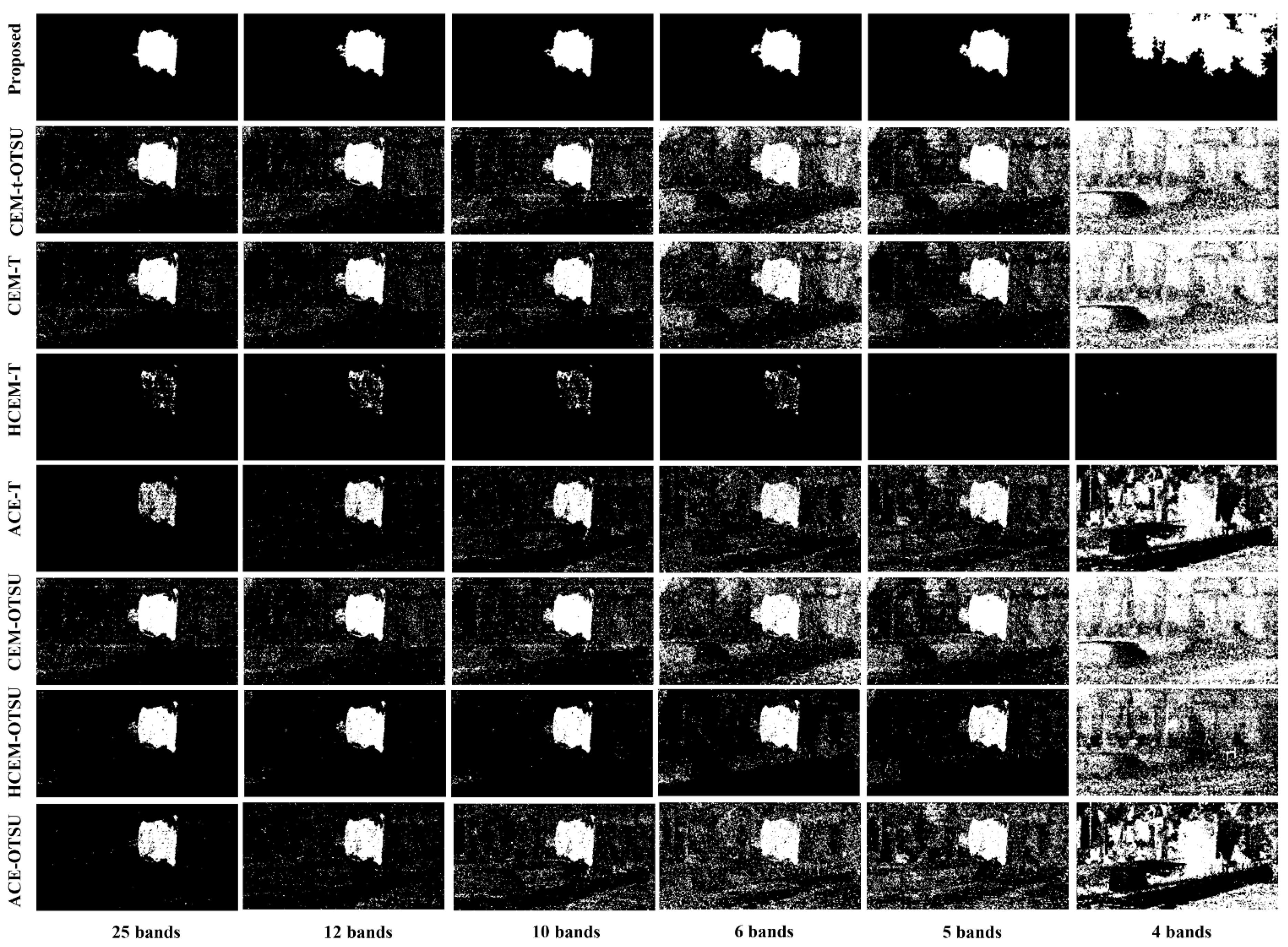
3.6. Experimental Results in the BF Scene
3.7. Experimental Results in the UAV Scene
3.8. Parameter Analysis
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, R.; Shi, Z.; Zou, Z.; Zhang, Z. Ensemble-based cascaded constrained energy minimization for hyperspectral target detection. Remote Sens. 2019, 11, 1310. [Google Scholar] [CrossRef] [Green Version]
- Bárta, V.; Racek, F. Hyperspectral discrimination ofcamouflaged target. In Proceedings of the SPIE 10432: SPIE Security + Defence: Target and Background Signatures III, Warsaw, Poland, 11–12 September 2017; p. 1043207. [Google Scholar]
- Zou, Z.; Shi, Z. Hierarchical Suppression Method for Hyperspectral Target Detection. IEEE Trans. Geosci. Remote Sens. 2016, 54, 330–342. [Google Scholar] [CrossRef]
- Manolakis, D.; Marden, D.; Shaw, G.A. Hyperspectral image processing for automatic target detection applications. Linc. Lab. J. 2003, 14, 79–116. [Google Scholar]
- Manolakis, D.; Truslow, E.; Pieper, M.; Cooley, T.; Brueggeman, M. Detection algorithms in hyperspectral imaging systems: An overview of practical algorithms. IEEE Signal Process. Mag. 2013, 31, 24–33. [Google Scholar] [CrossRef]
- Manolakis, D.; Lockwood, R.; Cooley, T.; Jacobson, J. Is there a best hyperspectral detection algorithm? In Proceedings of the SPIE 7334: Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XV, Orlando, FL, USA, 13–16 April 2009; p. 733402. [Google Scholar]
- Manolakis, D.; Shaw, G. Detection algorithms for hyperspectral imaging applications. IEEE Signal Process. Mag. 2002, 19, 29–43. [Google Scholar] [CrossRef]
- Yan, Q.; Li, H.; Wu, Y.; Zhang, X.; Wang, S.; Zhang, Q. Camouflage target detection based on short-wave infrared hyperspectral images. In Proceedings of the SPIE 11023, The Fifth Symposium on Novel Optoelectronic Detection Technology and Application, Xi’an, China, 12 March 2019; p. 110232M. [Google Scholar]
- Shi, G.; Li, X.; Huang, B.; Hua, W.; Guo, T.; Liu, X. Camouflage target reconnaissance based on hyperspectral imaging technology. In Proceedings of the 2015 International Conference on Optical Instruments and Technology: Optoelectronic Imaging and Processing Technology, Beijing, China, 5 August 2015. [Google Scholar]
- Farrand, W.H.; Harsanyi, J.C. Mapping the distribution of mine tailings in the Coeur d’Alene River Valley, Idaho, through the use of a constrained energy minimization technique. Remote Sens. Environ. 1997, 59, 64–76. [Google Scholar] [CrossRef]
- Kumar, V.; Ghosh, J.K. Camouflage Detection Using MWIR Hyperspectral Images. J. Indian Soc. Remote Sens. 2016, 45, 139–145. [Google Scholar] [CrossRef]
- Cao, X.; Yue, T.; Lin, X.; Lin, S.; Yuan, X.; Dai, Q.; Carin, L.; Brady, D.J. Computational Snapshot Multispectral Cameras Toward dynamic capture of the spectral world. IEEE Signal Process. Mag. 2016, 33, 95–108. [Google Scholar] [CrossRef]
- Karlholm, J.; Renhorn, I. Wavelength band selection method for multispectral target detection. Appl. Opt. 2002, 41, 6786–6795. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, F.; Li, X. Optimal Clustering Framework for Hyperspectral Band Selection. IEEE Geosci. Remote Sens. Mag. 2018, 10, 5910–5922. [Google Scholar] [CrossRef] [Green Version]
- Gong, M.; Zhang, M.; Yuan, Y. Unsupervised Band Selection Based on Evolutionary Multiobjective Optimization for Hyperspectral Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 544–557. [Google Scholar] [CrossRef]
- Wei, X.; Zhu, W.; Liao, B.; Cai, L. Scalable One-Pass Self-Representation Learning for Hyperspectral Band Selection. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4360–4374. [Google Scholar] [CrossRef]
- Dalla Mura, M.; Atli Benediktsson, J.; Waske, B.; Bruzzone, L. Extended profiles with morphological attribute filters for the analysis of hyperspectral data. Int. J. Remote Sens. 2010, 31, 5975–5991. [Google Scholar] [CrossRef]
- Benediktsson, J.A.; Palmason, J.A.; Sveinsson, J.R. Classification of hyperspectral data from urban areas based on extended morphological profiles. IEEE Trans. Geosci. Remote Sens. 2005, 43, 480–491. [Google Scholar] [CrossRef]
- Benediktsson, J.A.; Pesaresi, M.; Amason, K. Classification and feature extraction for remote sensing images from urban areas based on morphological transformations. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1940–1949. [Google Scholar] [CrossRef] [Green Version]
- Fauvel, M.; Benediktsson, J.A.; Chanussot, J.; Sveinsson, J.R. Spectral and Spatial Classification of Hyperspectral Data Using SVMs and Morphological Profiles. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3804–3814. [Google Scholar] [CrossRef] [Green Version]
- Kwan, C.; Gribben, D.; Ayhan, B.; Bernabe, S.; Plaza, A.; Selva, M. Improving Land Cover Classification Using Extended Multi-Attribute Profiles (EMAP) Enhanced Color, Near Infrared, and LiDAR Data. Remote Sens. 2020, 12, 1392. [Google Scholar] [CrossRef]
- Kwan, C.; Ayhan, B.; Budavari, B.; Lu, Y.; Perez, D.; Li, J.; Bernabe, S.; Plaza, A. Deep Learning for Land Cover Classification Using Only a Few Bands. Remote Sens. 2020, 12, 2000. [Google Scholar] [CrossRef]
- Zhang, C.; Cheng, H.; Chen, C.; Zheng, W. The development of hyperspectral remote sensing and its threat to military equipment. Electro-Opt. Technol. Appl. 2008, 23, 10–12. [Google Scholar]
- Liu, K.; Shun, X.; Zhao, Z.; Liang, J.; Wang, S. Hyperspectral imaging detection method for ground target camouflage features. J. PLA Univ. Sci. Technol. (Nat. Sci. Ed.) 2005, 6, 166–169. [Google Scholar]
- Tian, Y.; Jin, W.; Zhao, Z.; Dong, S.; Jin, B. Research on UV detection technology of snow camouflage materials based on reflection spectra and images. Infrared Technol. 2017, 39, 469–474. [Google Scholar]
- Bao, J.; Bawendi, M.G. A colloidal quantum dot spectrometer. Nature 2015, 523, 67–70. [Google Scholar] [CrossRef]
- Jia, J.; Barnard, K.J.; Hirakawa, K. Fourier spectral filter array for optimal multispectral imaging. IEEE Trans. Image Process. 2016, 25, 1530–1543. [Google Scholar] [CrossRef] [PubMed]
- Geelen, B.; Carolina, B.; Gonzalez, P.; Tack, N.; Lambrechts, A. A tiny, VIS-NIR snapshot multispectral camera. Proc. SPIE—Int. Soc. Opt. Eng. 2015, 9374. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Hu, J. Image segmentation based on 2D Otsu method with histogram analysis. In Proceedings of the 2008 International Conference on Computer Science and Software Engineering, Wuhan, China, 12–14 December 2008; pp. 105–108. [Google Scholar]
- Meng, F.J.; Song, M.; Guo, B.L.; Shi, R.X.; Shan, D.L. Image fusion based on object region detection and Non-Subsampled Contourlet Transform. Comput. Electr. Eng. 2017, 62, 375–383. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Prentice-Hall, Inc.: Upper Saddle Rive, NJ, USA, 2007. [Google Scholar]
- Ma, L.; Jia, Z.; Yu, Y.; Yang, J.; Kasabov, N.K. Multi-Spectral Image Change Detection Based on Band Selection and Single-Band Iterative Weighting. IEEE Access 2019, 7, 27948–27956. [Google Scholar] [CrossRef]
- Xue, B.; Yu, C.; Wang, Y.; Song, M.; Li, S.; Wang, L.; Chen, H.; Chang, C. A Subpixel Target Detection Approach to Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5093–5114. [Google Scholar] [CrossRef]
- Debes, C.; Merentitis, A.; Heremans, R.; Hahn, J.; Frangiadakis, N.; van Kasteren, T.; Liao, W.; Bellens, R.; Pižurica, A.; Gautama, S. Hyperspectral and LiDAR data fusion: Outcome of the 2013 GRSS data fusion contest. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2405–2418. [Google Scholar] [CrossRef]
- Sun, W.; Du, Q. Hyperspectral band selection: A review. IEEE Geosci. Remote Sens. Mag. 2019, 7, 118–139. [Google Scholar] [CrossRef]
- Geng, X.; Ji, L.; Sun, K.; Zhao, Y. CEM: More Bands, Better Performance. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1876–1880. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scene | Distance /m | Focus Length /mm | FOV /cm2 | Light Intensity /Lux | Integration Time /ms |
|---|---|---|---|---|---|
| Lawn | 23 | 35 | 740 × 393 | 19,618 | 0.154 |
| BT | 25 | 35 | 804 × 427 | 1370 | 5 |
| BF | 20 | 16 | 1408 × 748 | 1600 | 3 |
| 20 | 35 | 644 × 342 | 1600 | 3 | |
| UAV | 50 | 16 | 3520 × 1870 | 1800 | 3 |
| Number of Bands | The Wavelength of Selected Bands (nm) |
|---|---|
| 12 | 665/686/710/727/738/751/779/787/850/897/911/949 |
| 10 | 665/686/710/738/751/802/841/897/911/949 |
| 7 | 665/686/710/738/751/841/897 |
| 6 | 665/710/751/766/779/897 |
| 5 | 665/710//751/779/841 |
| 4 | 665/710/727/751 |
| = 0.2 | = 0.3 | = 0.4 | = 0.5 | = 0.6 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SCENE | |||||||||||||||
| LAWN | 0.9970 | 0.0017 | 0.9212 | 0.9970 | 0.0016 | 0.9222 | 0.9970 | 0.0012 | 0.9215 | 0.9957 | 0.0008 | 0.8952 | 0.9919 | 0.0005 | 0.8057 |
| BT | 0.9923 | 0.0028 | 0.9300 | 0.9923 | 0.0028 | 0.9300 | 0.9923 | 0.0028 | 0.9300 | 0.9909 | 0.0021 | 0.9080 | 0.9891 | 0.0014 | 0.8863 |
| BF | 0.9980 | 0.0011 | 0.9746 | 0.9980 | 0.0011 | 0.9746 | 0.9980 | 0.0011 | 0.9746 | 0.9980 | 0.0010 | 0.9728 | 0.9980 | 0.0009 | 0.9723 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Y.; Li, J.; Lin, W.; Chen, L.; Huang, F.; Wang, S. Camouflaged Target Detection Based on Snapshot Multispectral Imaging. Remote Sens. 2021, 13, 3949. https://doi.org/10.3390/rs13193949
Shen Y, Li J, Lin W, Chen L, Huang F, Wang S. Camouflaged Target Detection Based on Snapshot Multispectral Imaging. Remote Sensing. 2021; 13(19):3949. https://doi.org/10.3390/rs13193949
Chicago/Turabian StyleShen, Ying, Jie Li, Wenfu Lin, Liqiong Chen, Feng Huang, and Shu Wang. 2021. "Camouflaged Target Detection Based on Snapshot Multispectral Imaging" Remote Sensing 13, no. 19: 3949. https://doi.org/10.3390/rs13193949
APA StyleShen, Y., Li, J., Lin, W., Chen, L., Huang, F., & Wang, S. (2021). Camouflaged Target Detection Based on Snapshot Multispectral Imaging. Remote Sensing, 13(19), 3949. https://doi.org/10.3390/rs13193949