
A Novel Method for Estimating Spatial Distribution of Forest Above-Ground Biomass Based on Multispectral Fusion Data and Ensemble Learning Algorithm




Abstract
:
1. Introduction
2. Study Area and Data
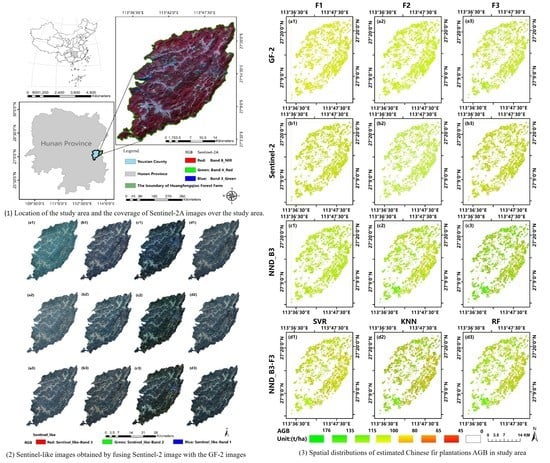
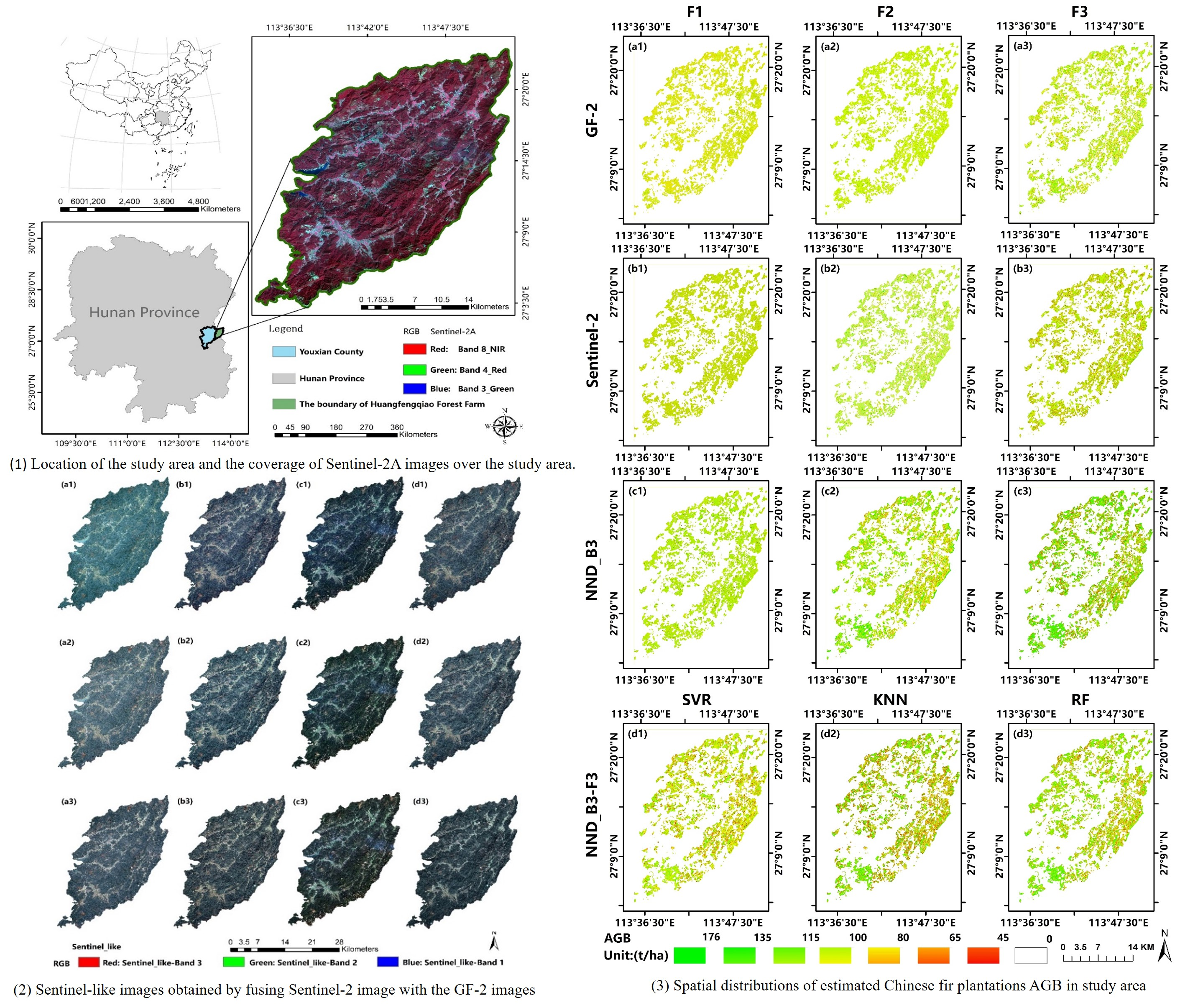
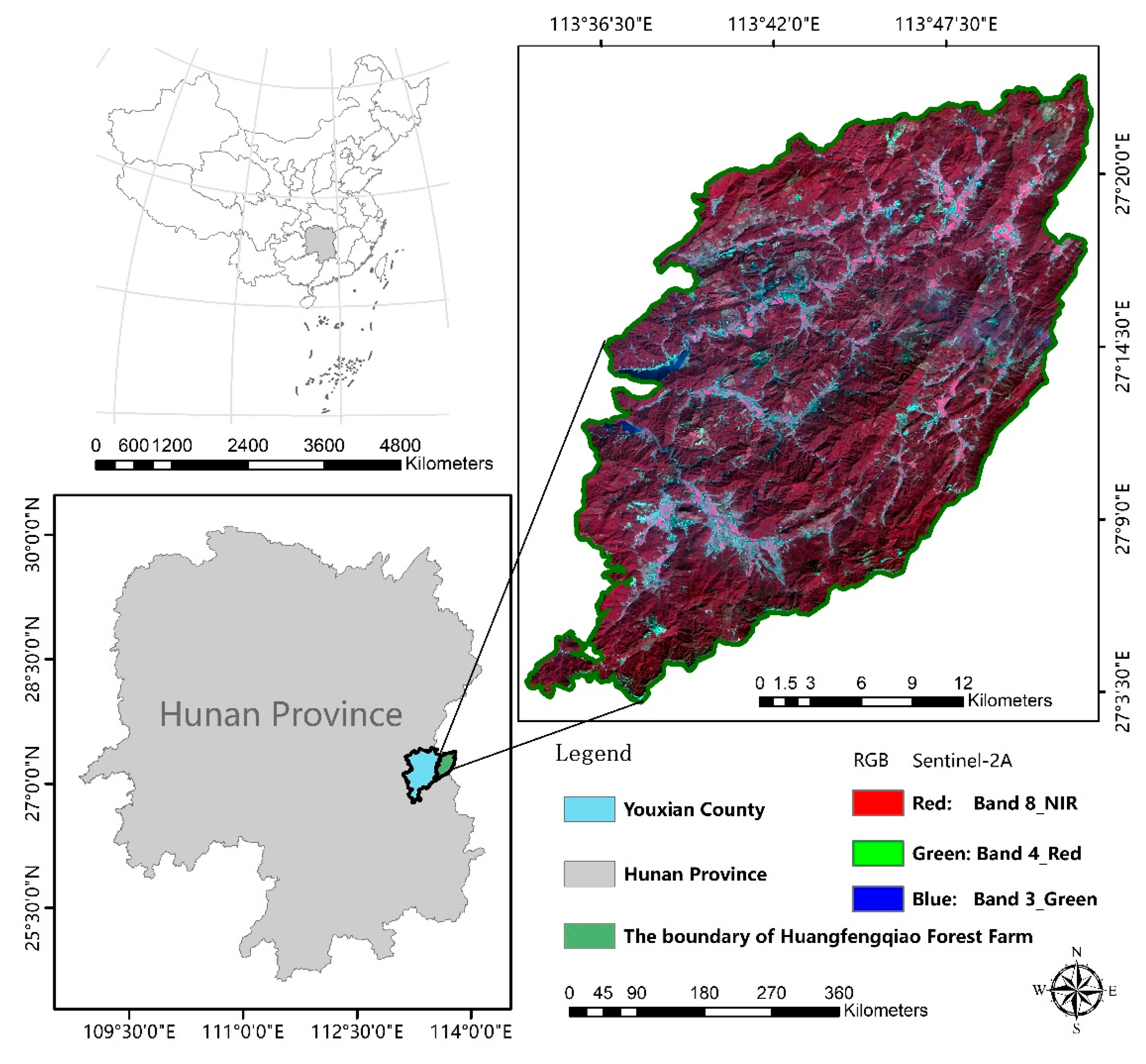
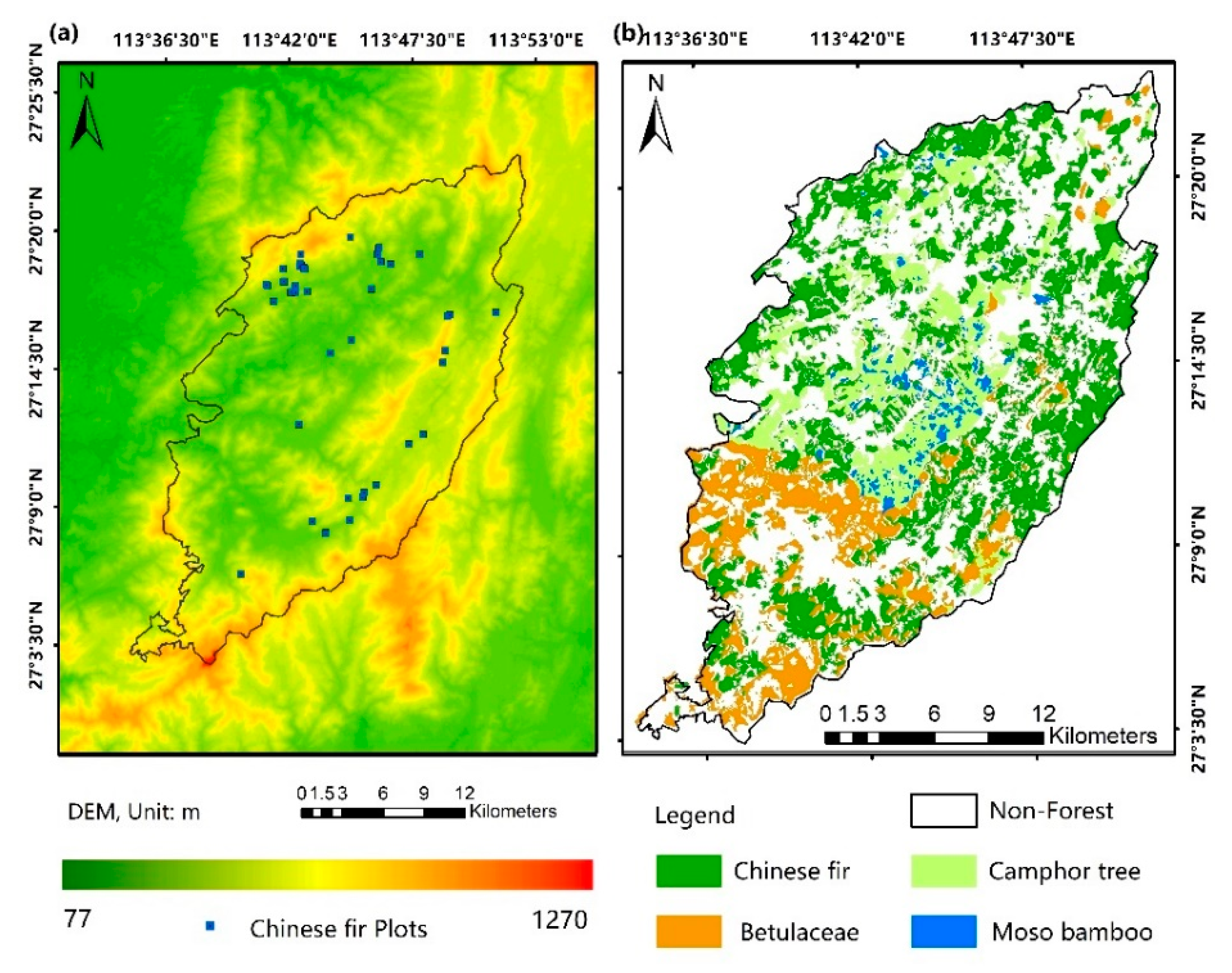
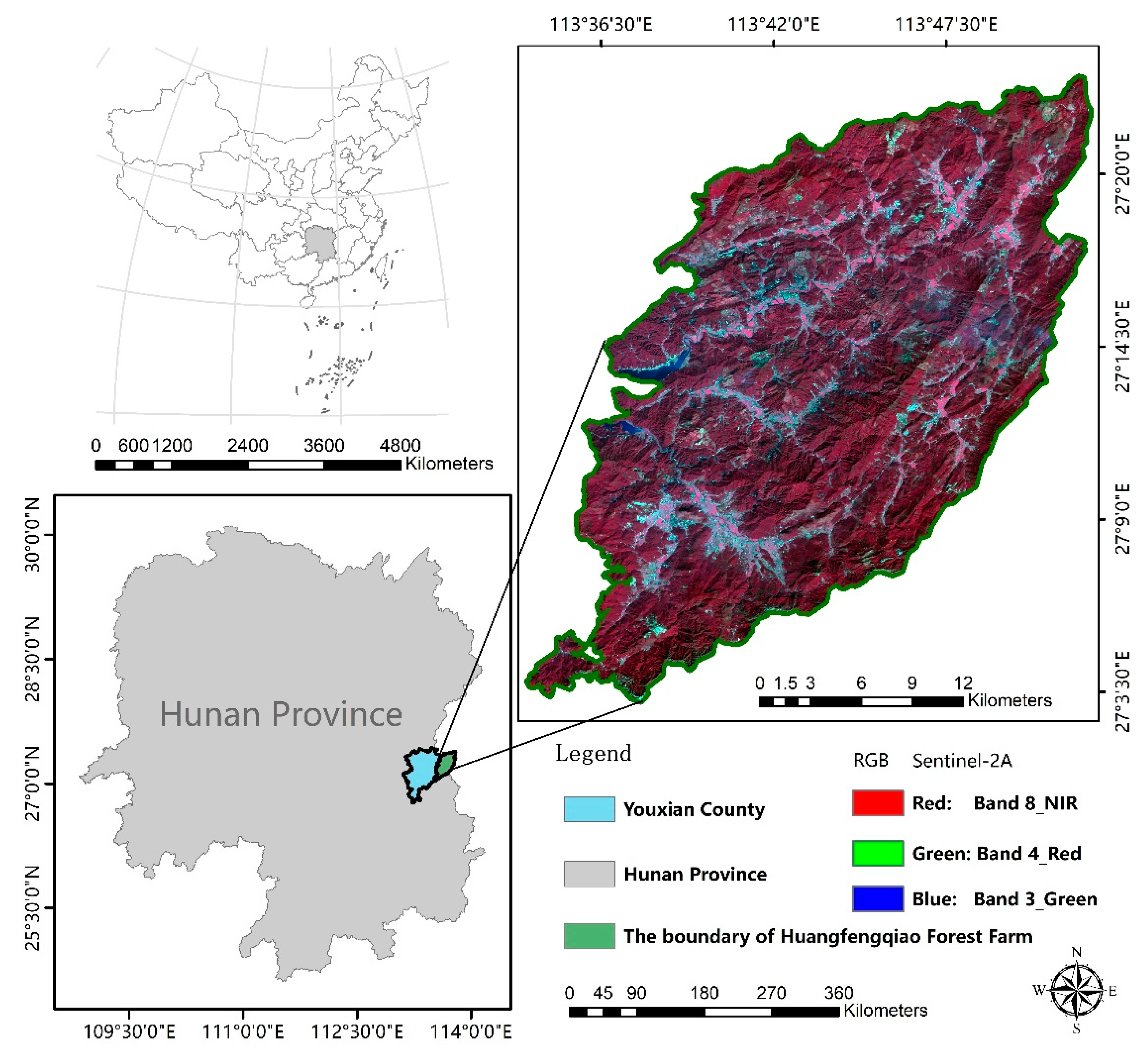
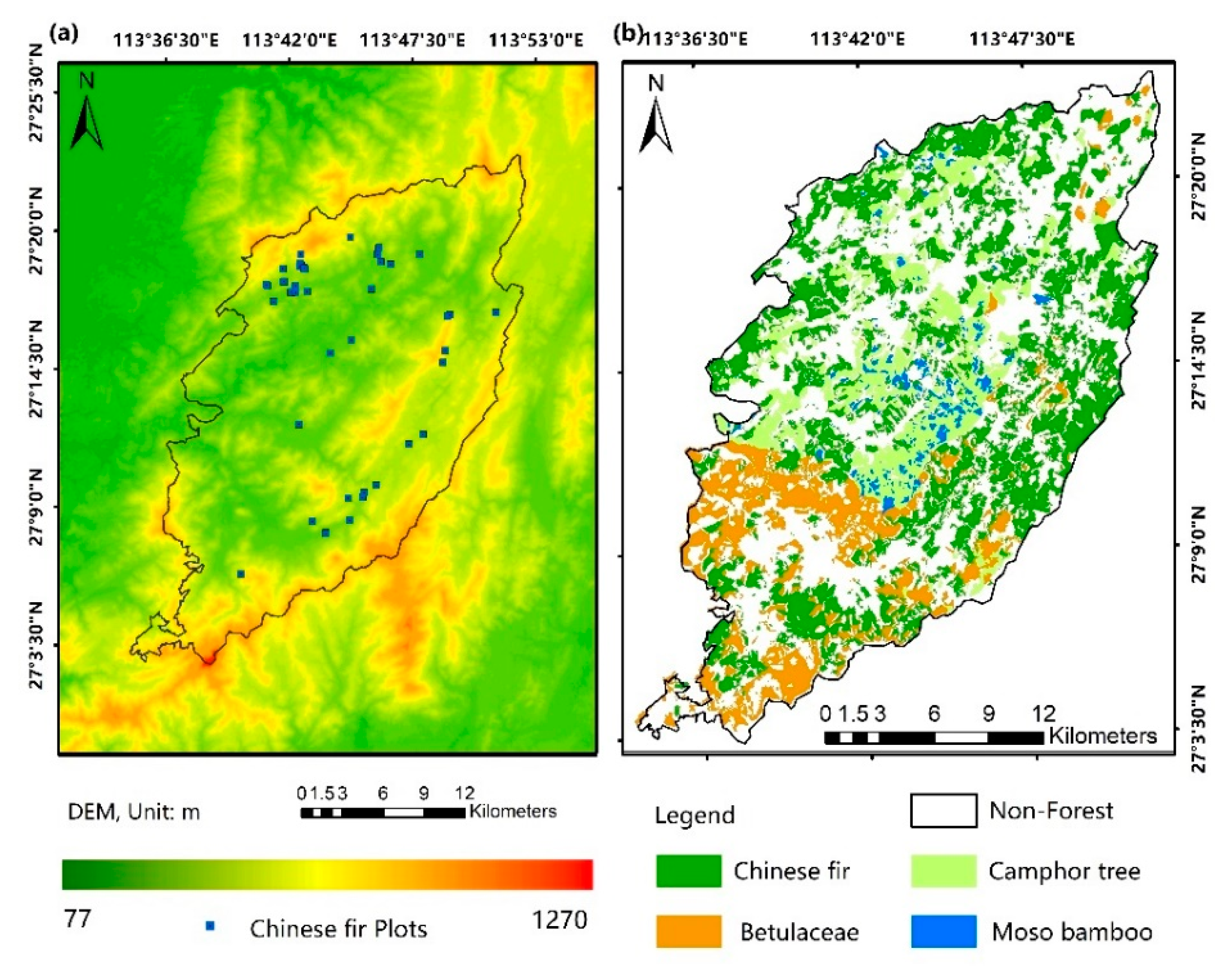
2.1. Study Area
2.2. Data Preparation
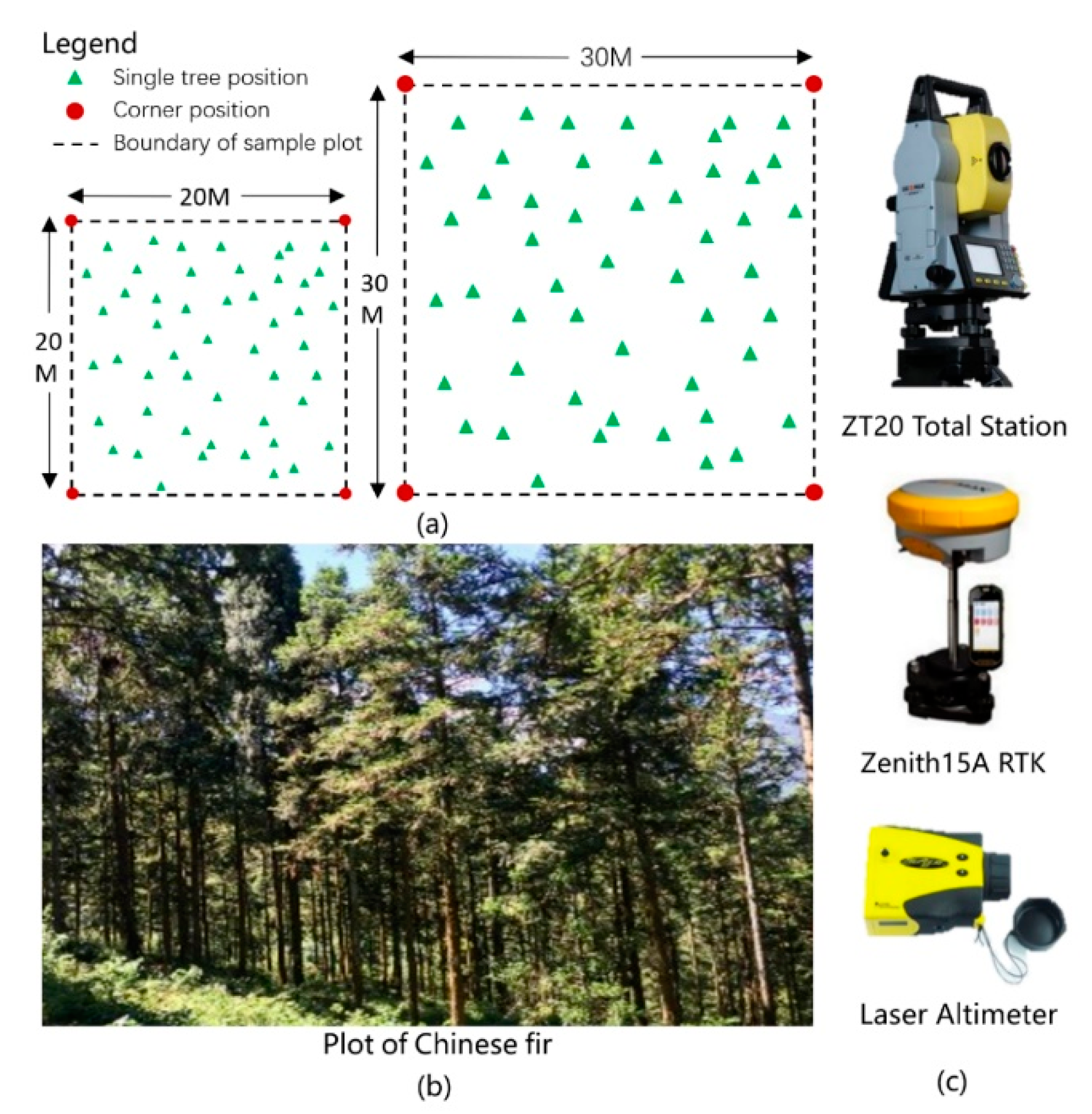
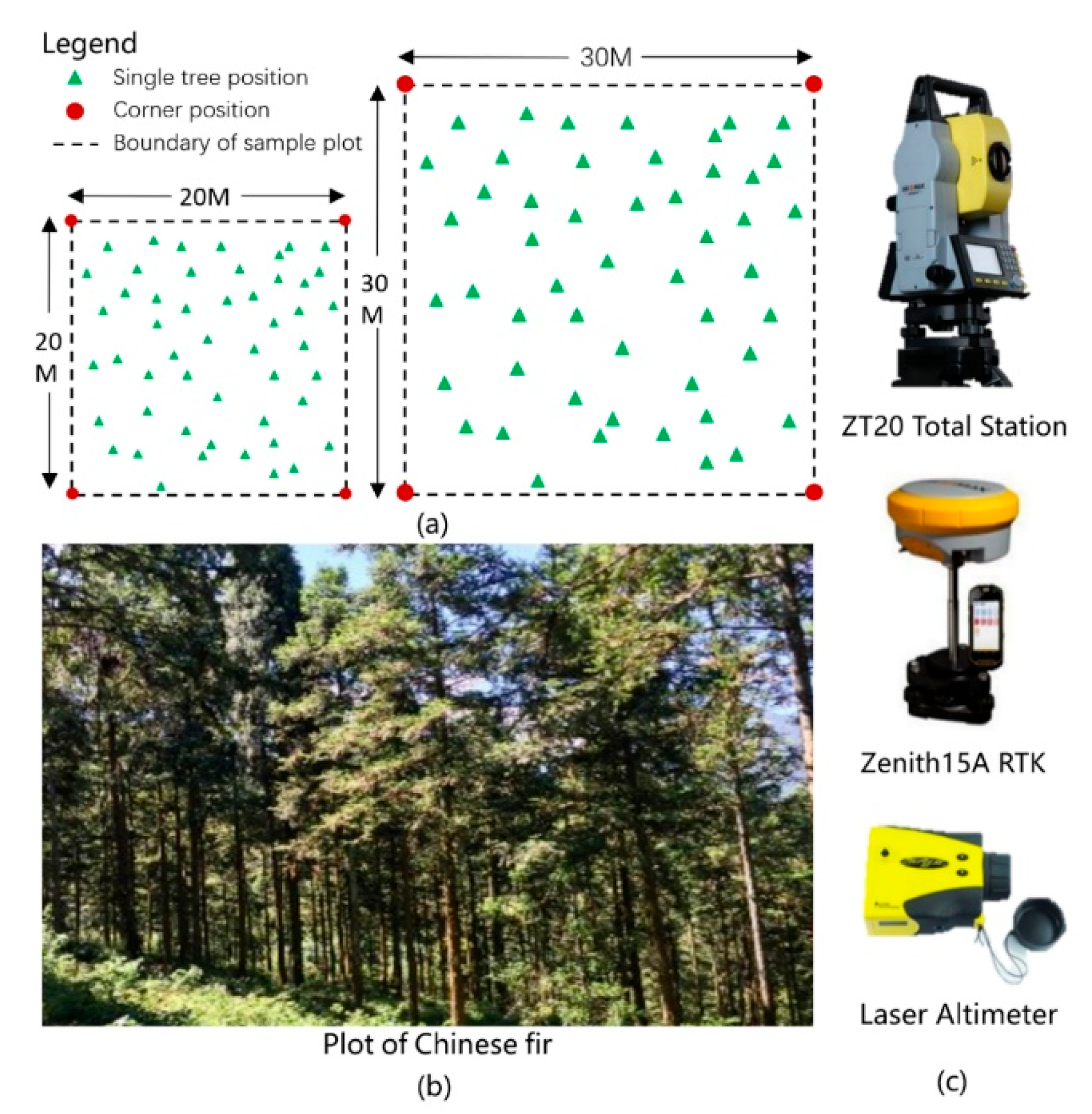
2.2.1. Field Plot Data Collection
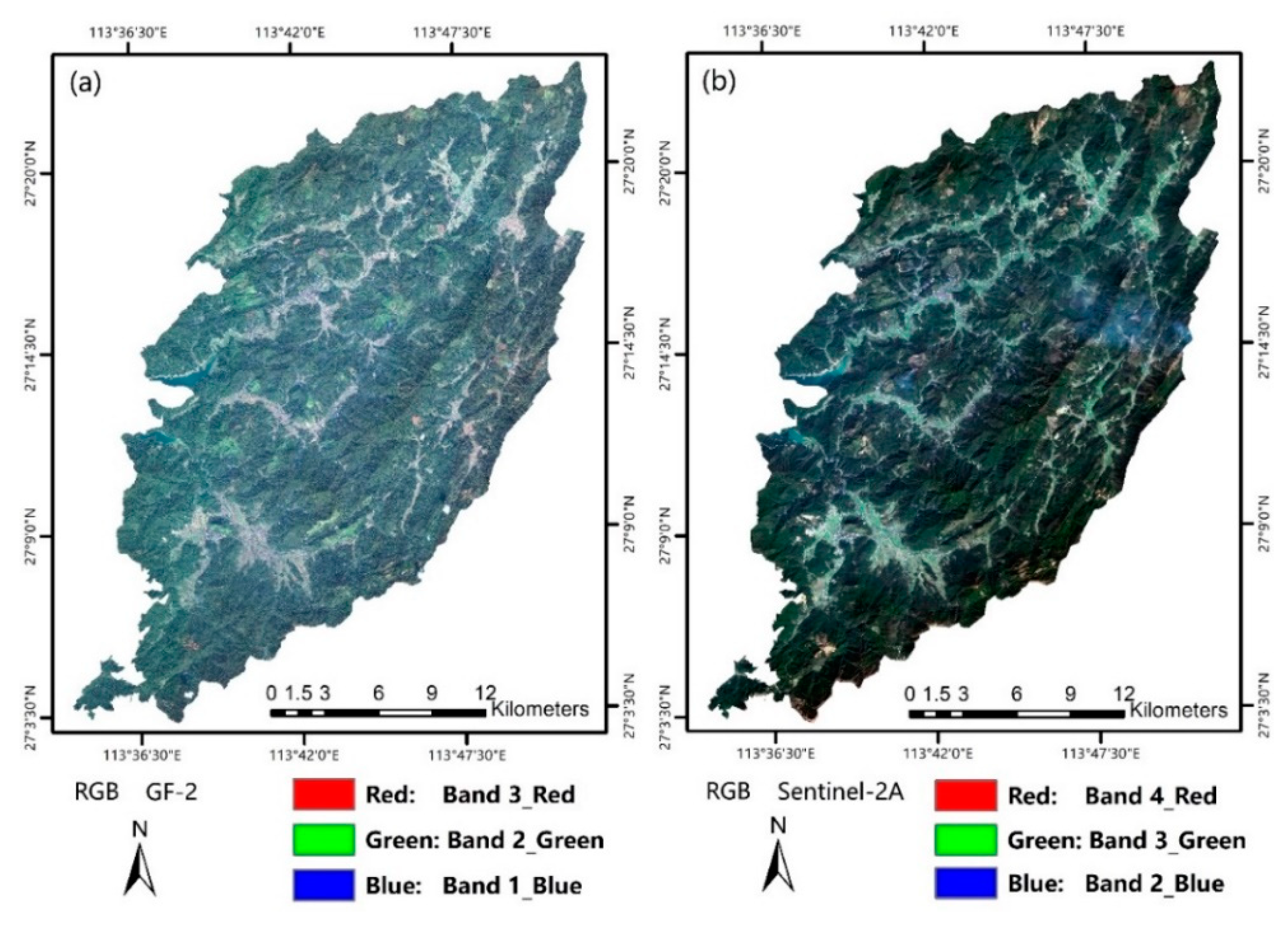
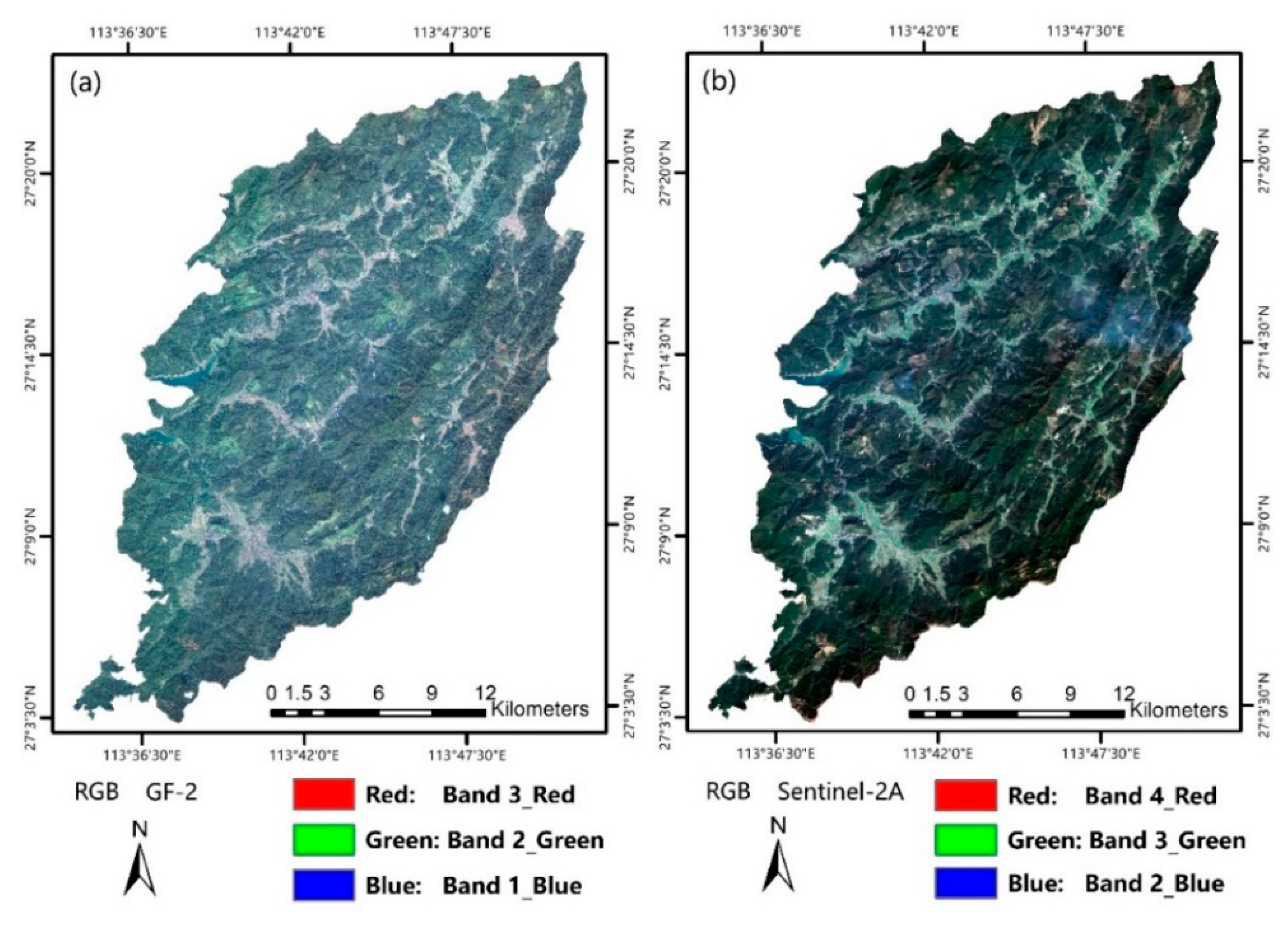
2.2.2. Satellite Image Collection and Pre-Processing
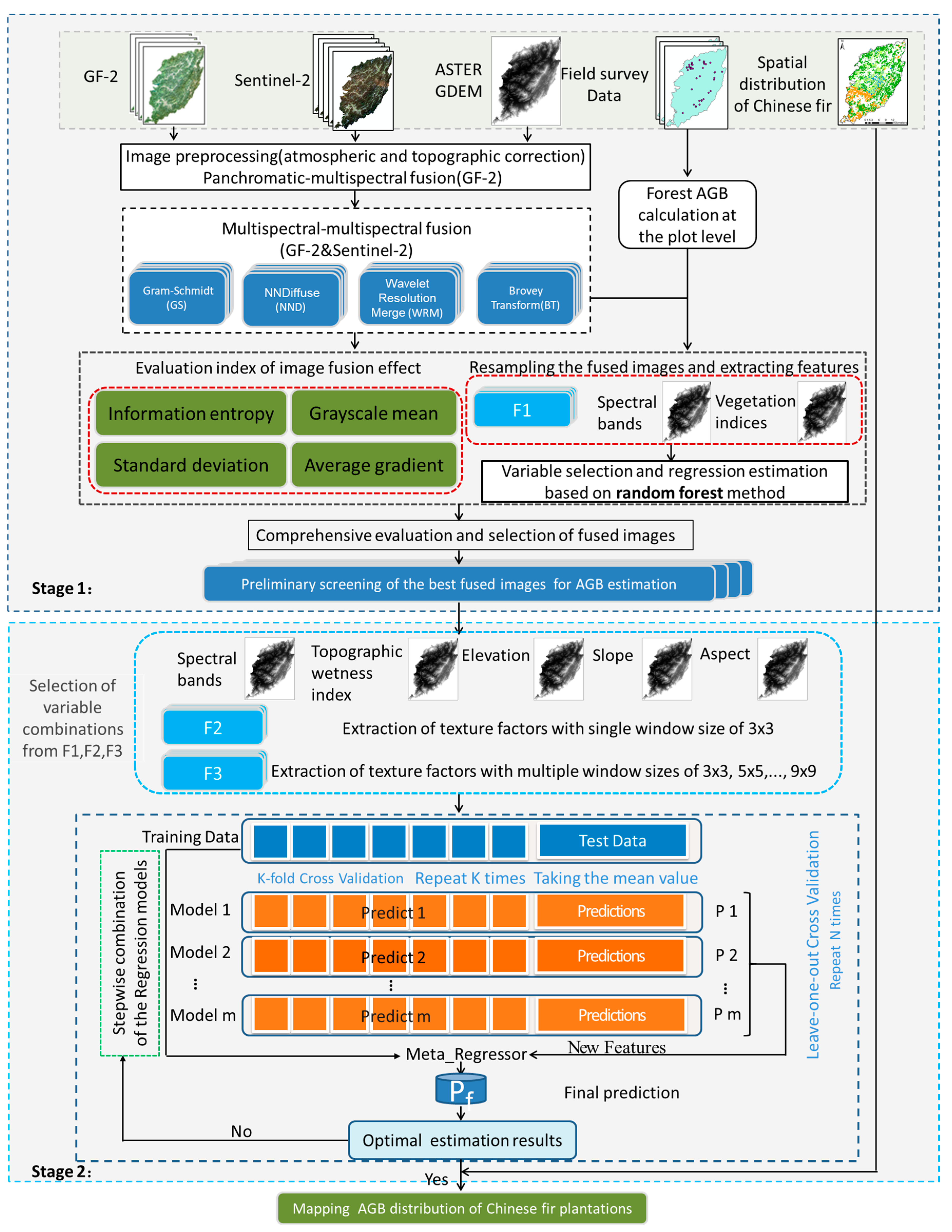
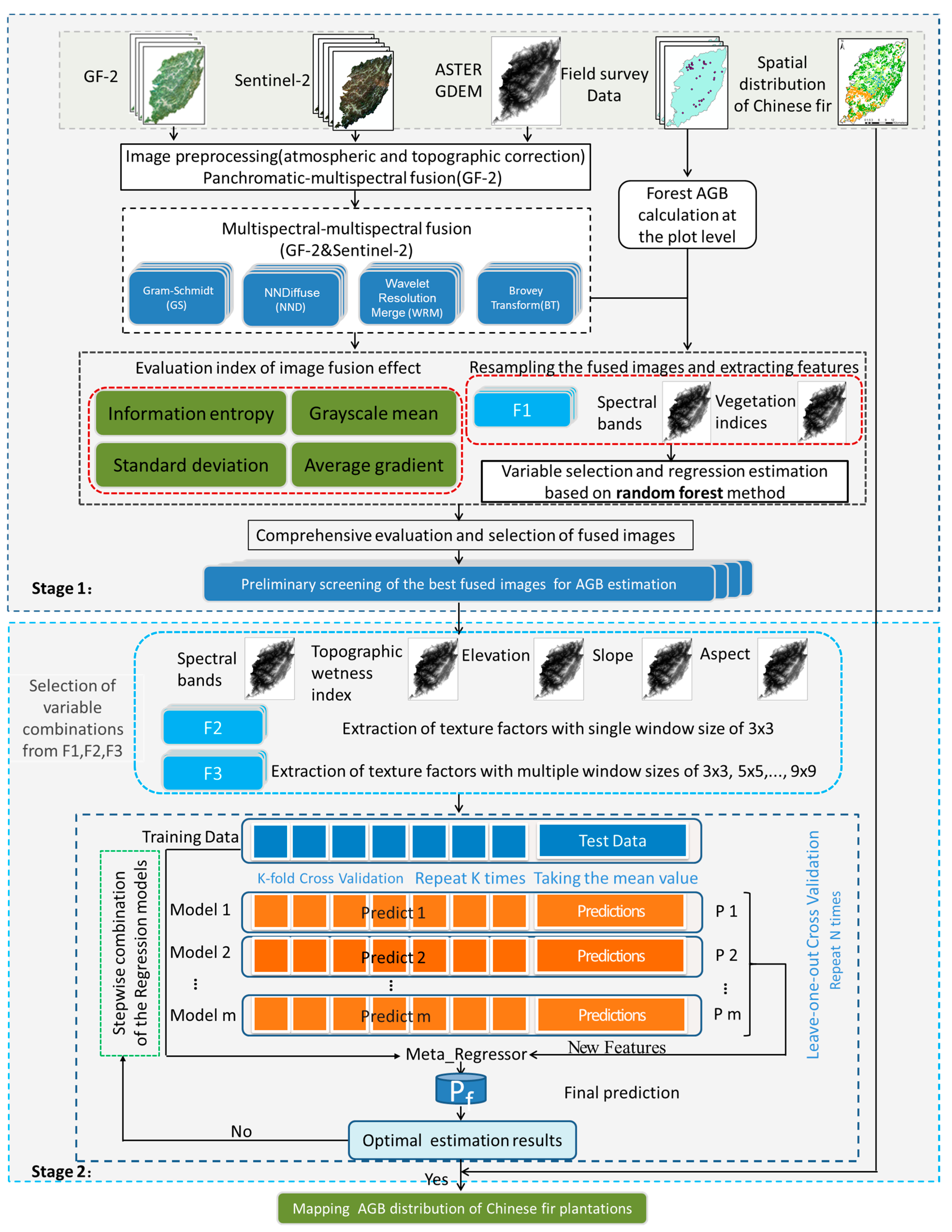
3. Methods
3.1. The RF-S Model
3.2. Multispectral Image Data Fusion
3.3. Selecting the Optimal Fused Image for Forest AGB Estimation
3.3.1. The Fused Image Feature Extraction
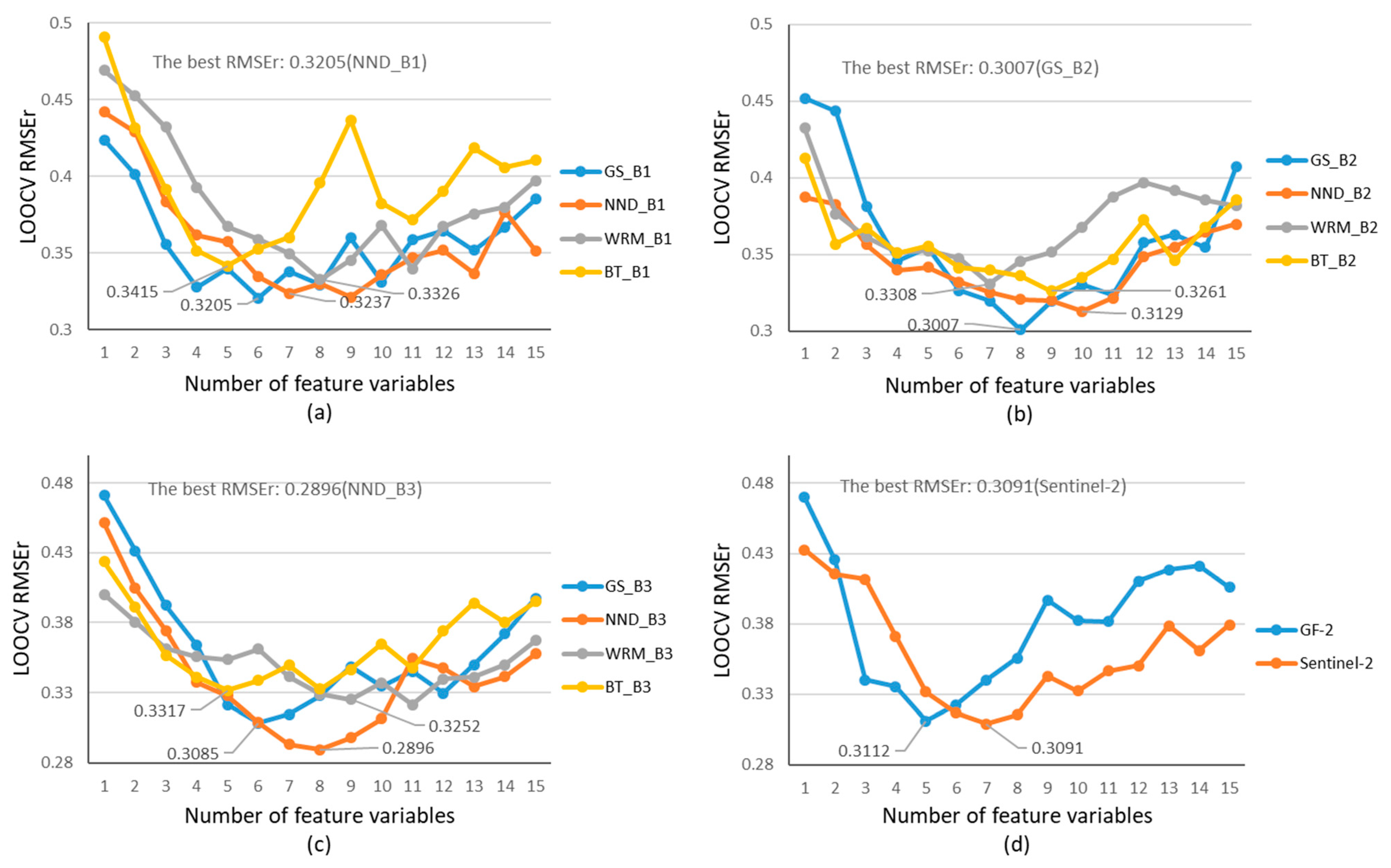
3.3.2. The Feature Selection and the AGB Estimation RMSEr Calculation for Each Fused Image
3.3.3. Image Evaluation and Selection
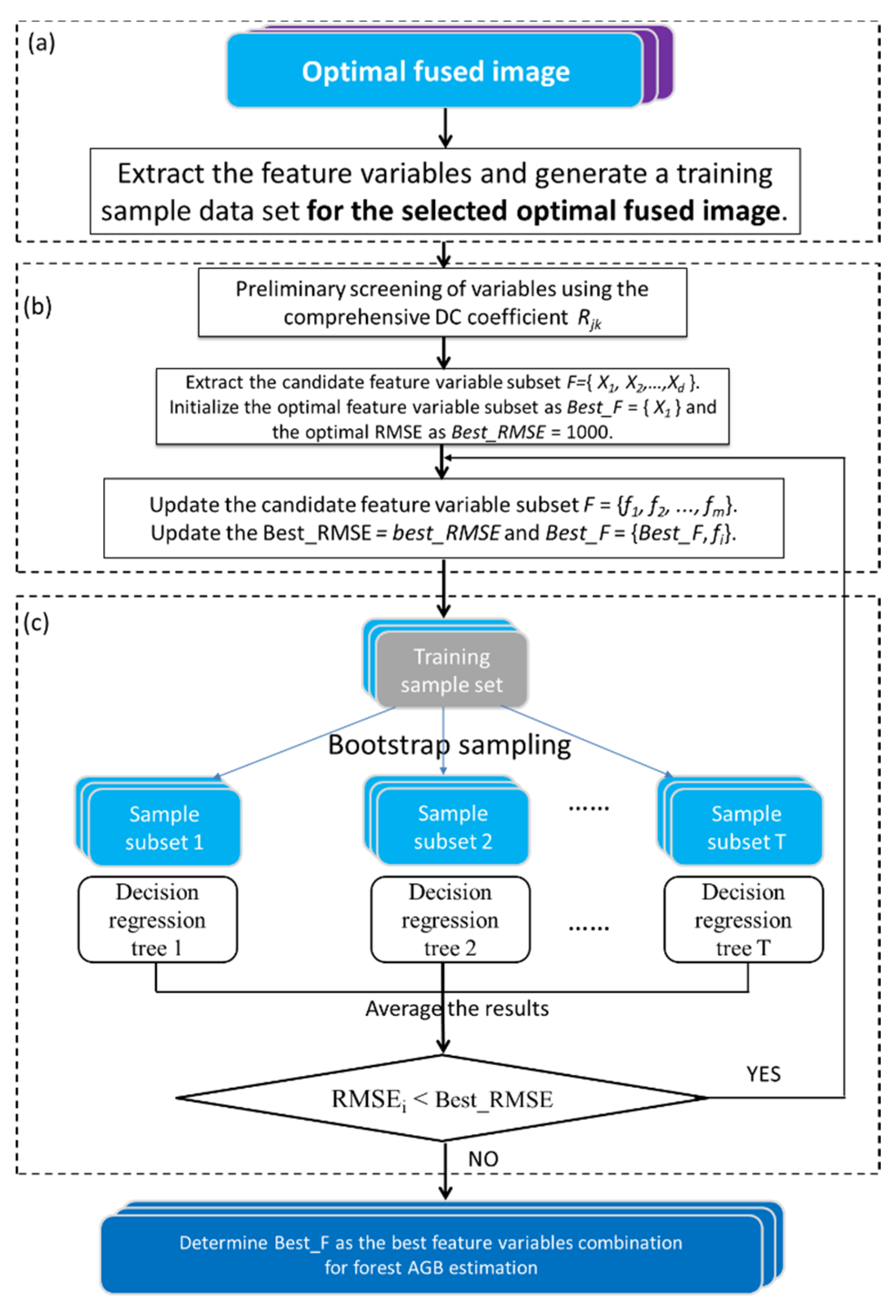
3.4. Forest AGB Estimation Modeling Based on the Selected Optimal Fused Images
3.4.1. Feature Variable Extraction
3.4.2. Feature Variable Combinations
3.4.3. Stacking Ensemble Algorithm
3.5. Model Evaluation and Application
4. Results and Discussion
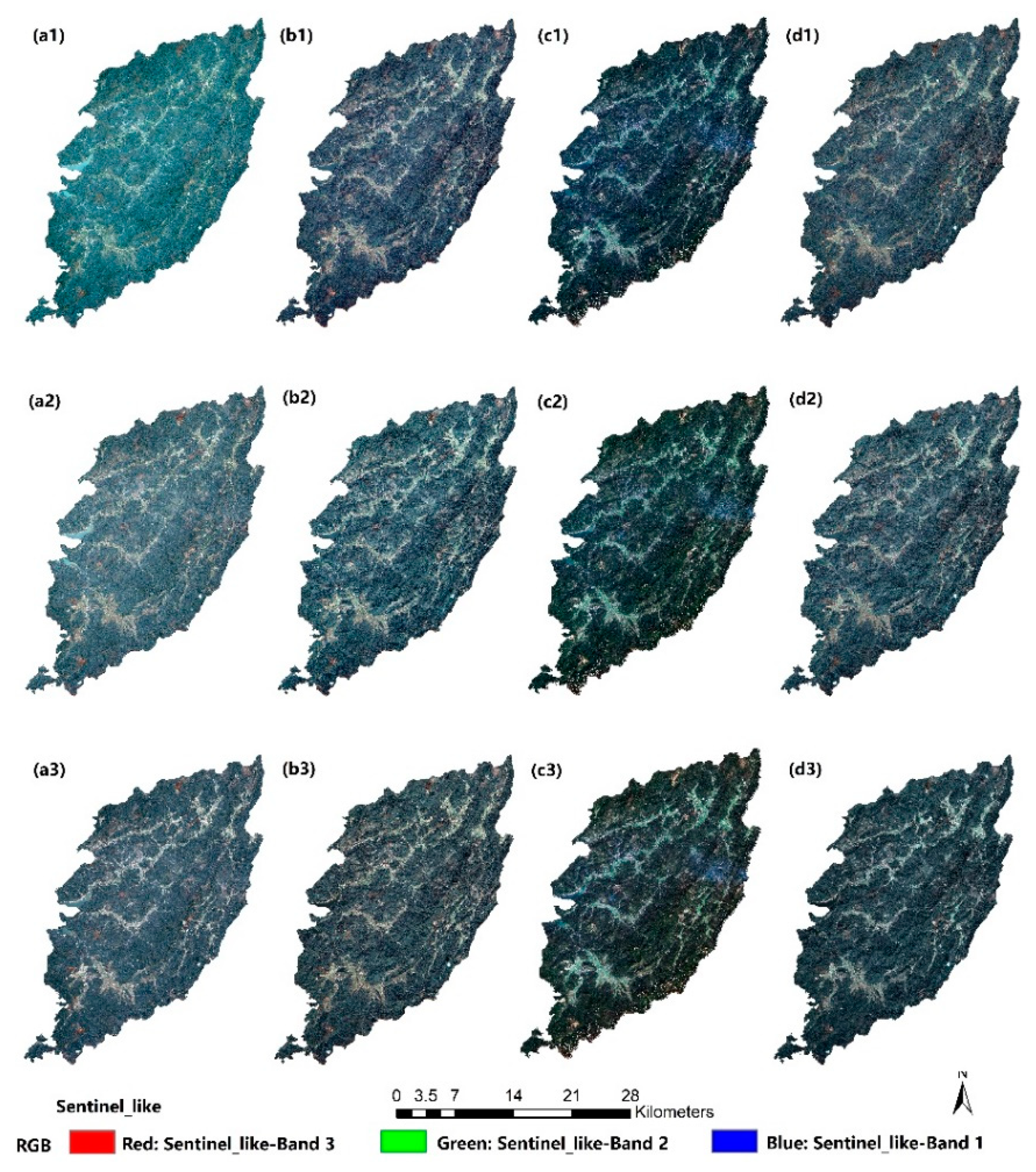
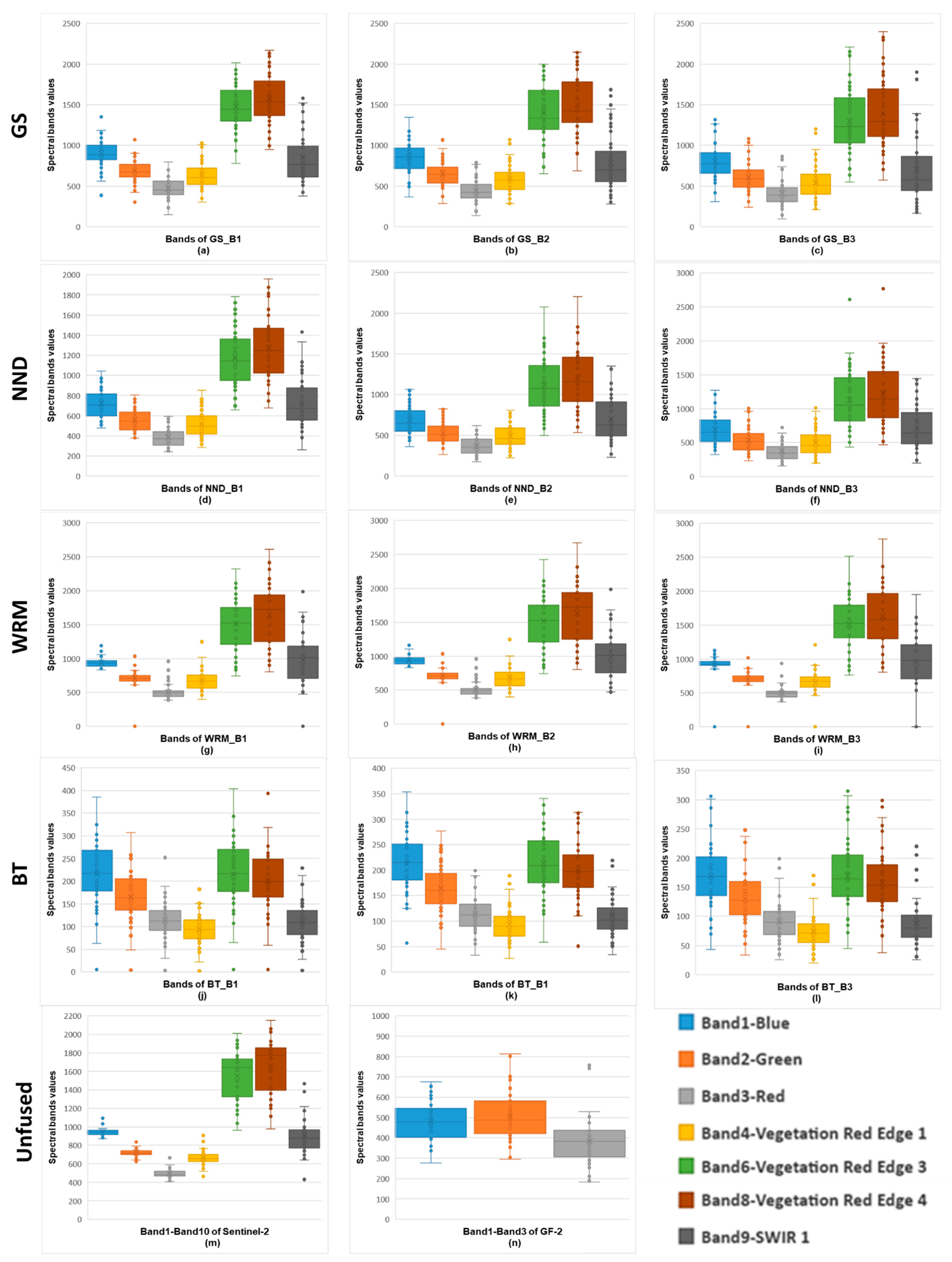
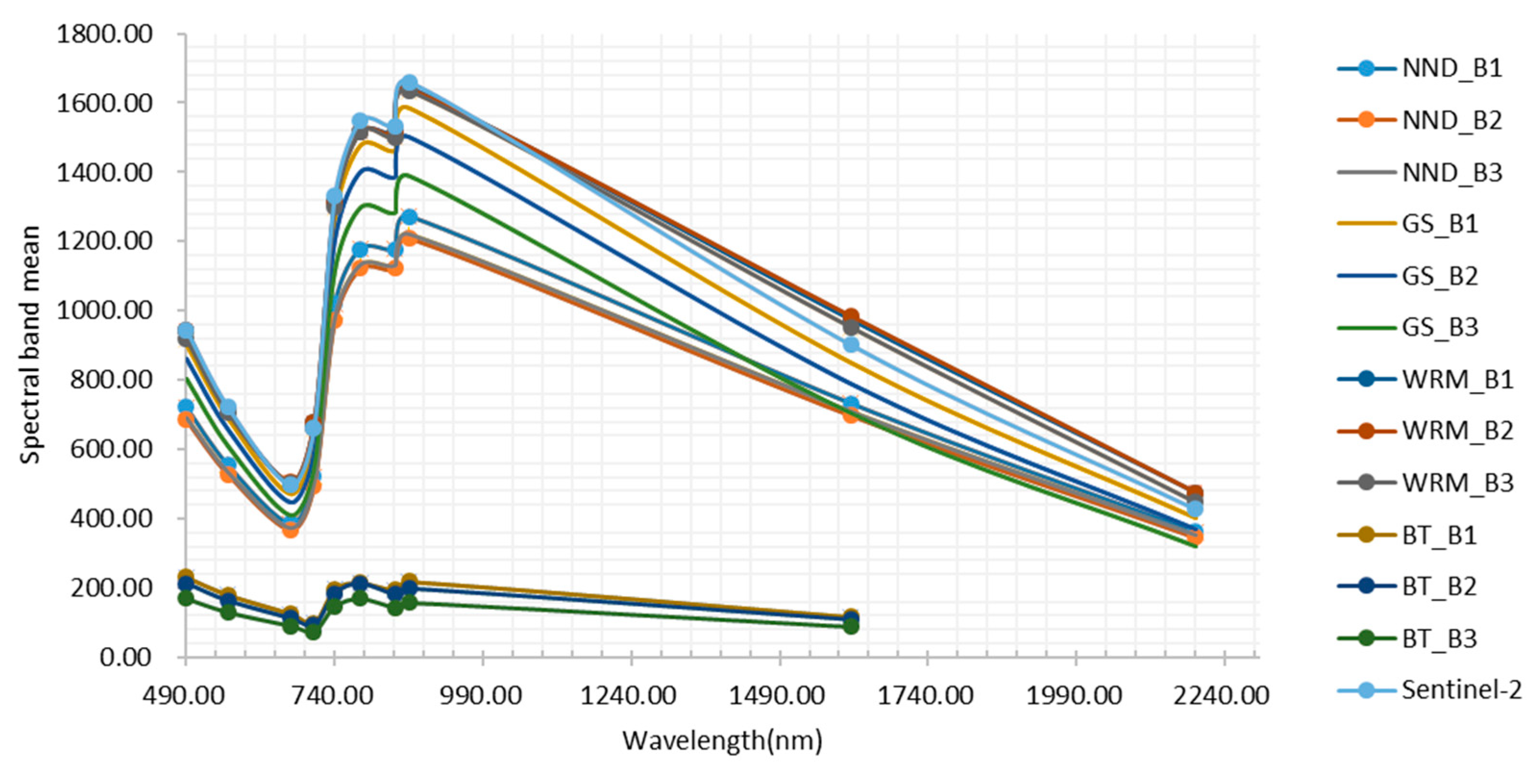
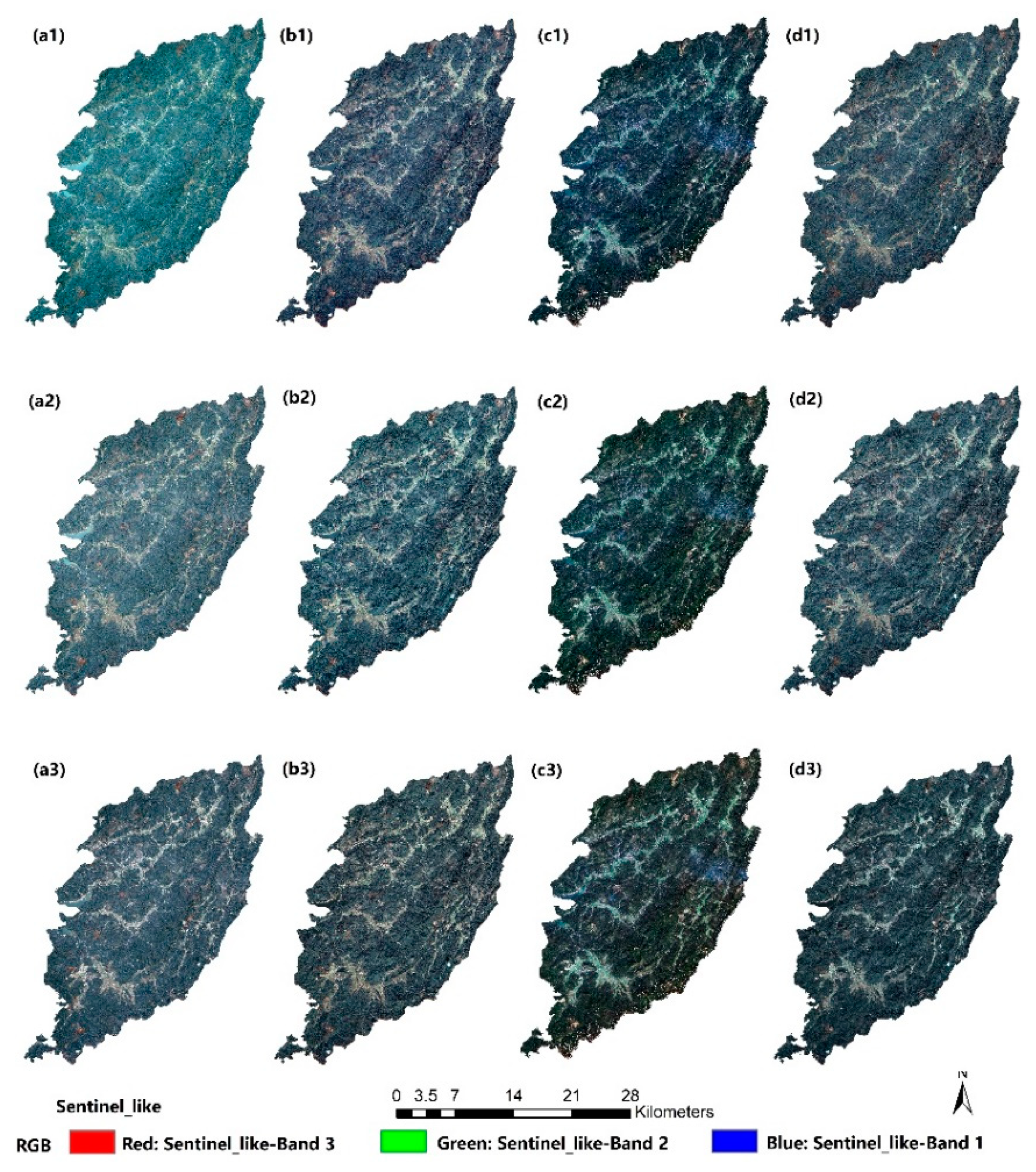
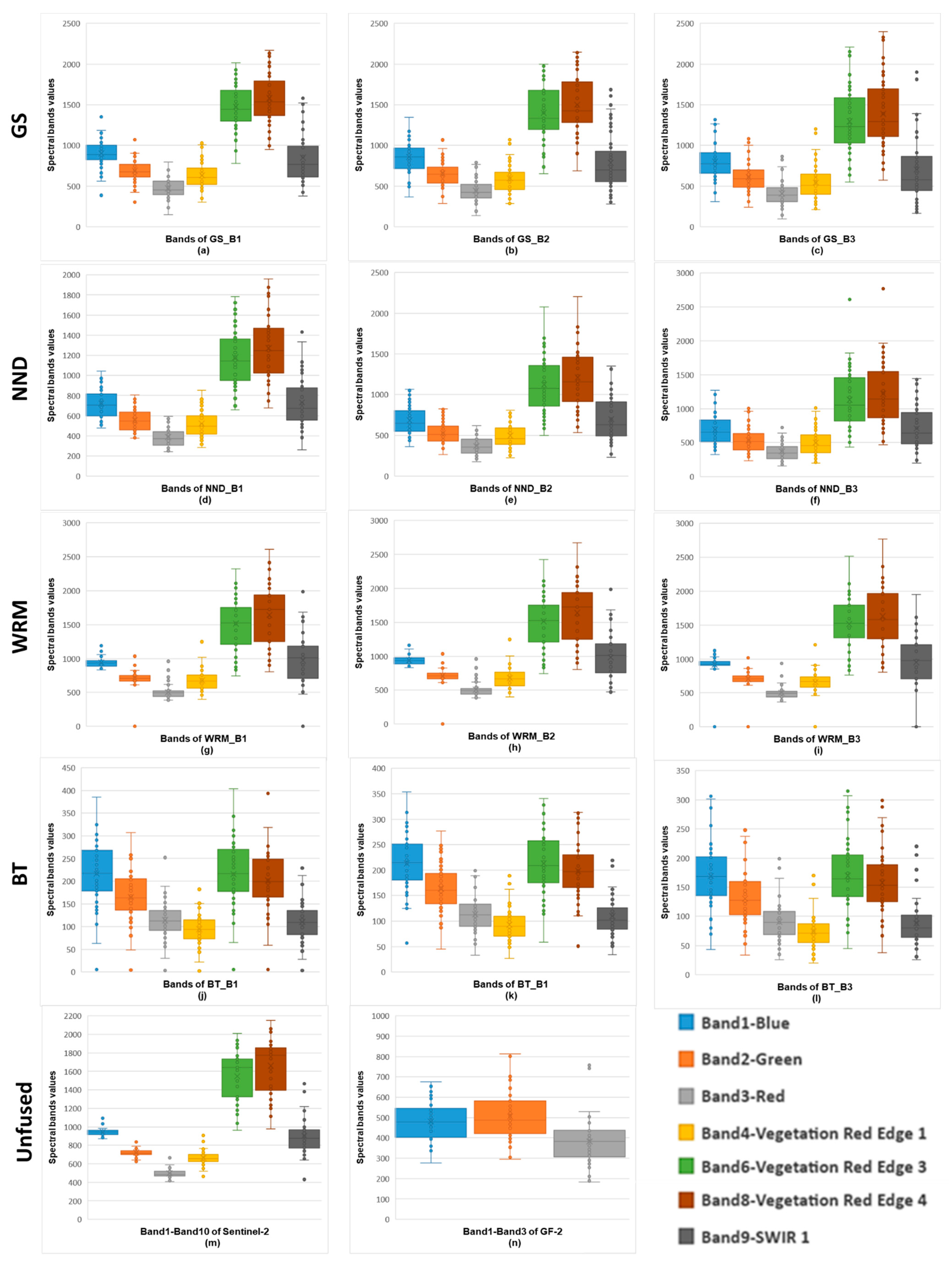
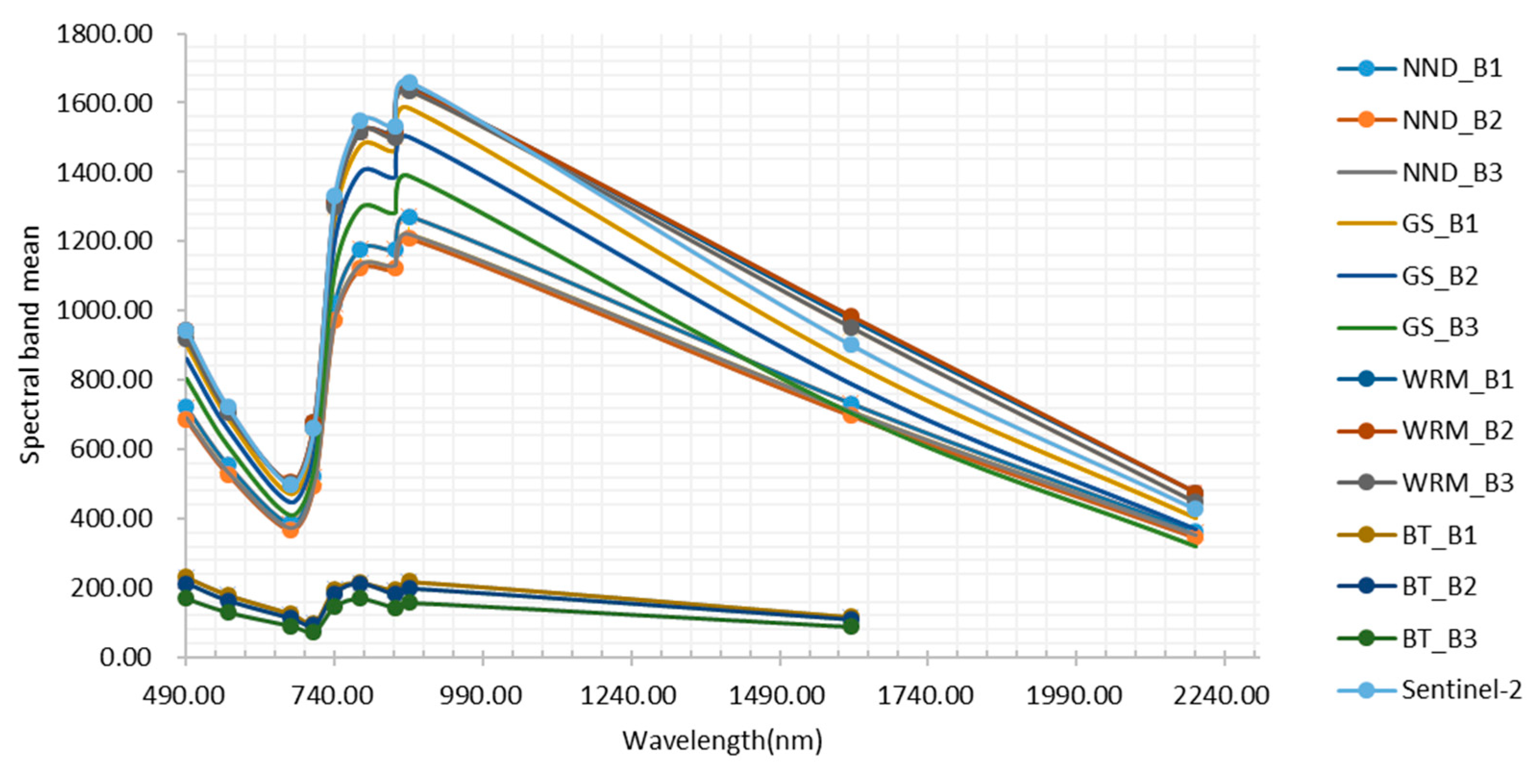
4.1. Twelve Sentinel-Like Images Generated by Four Fusion Methods
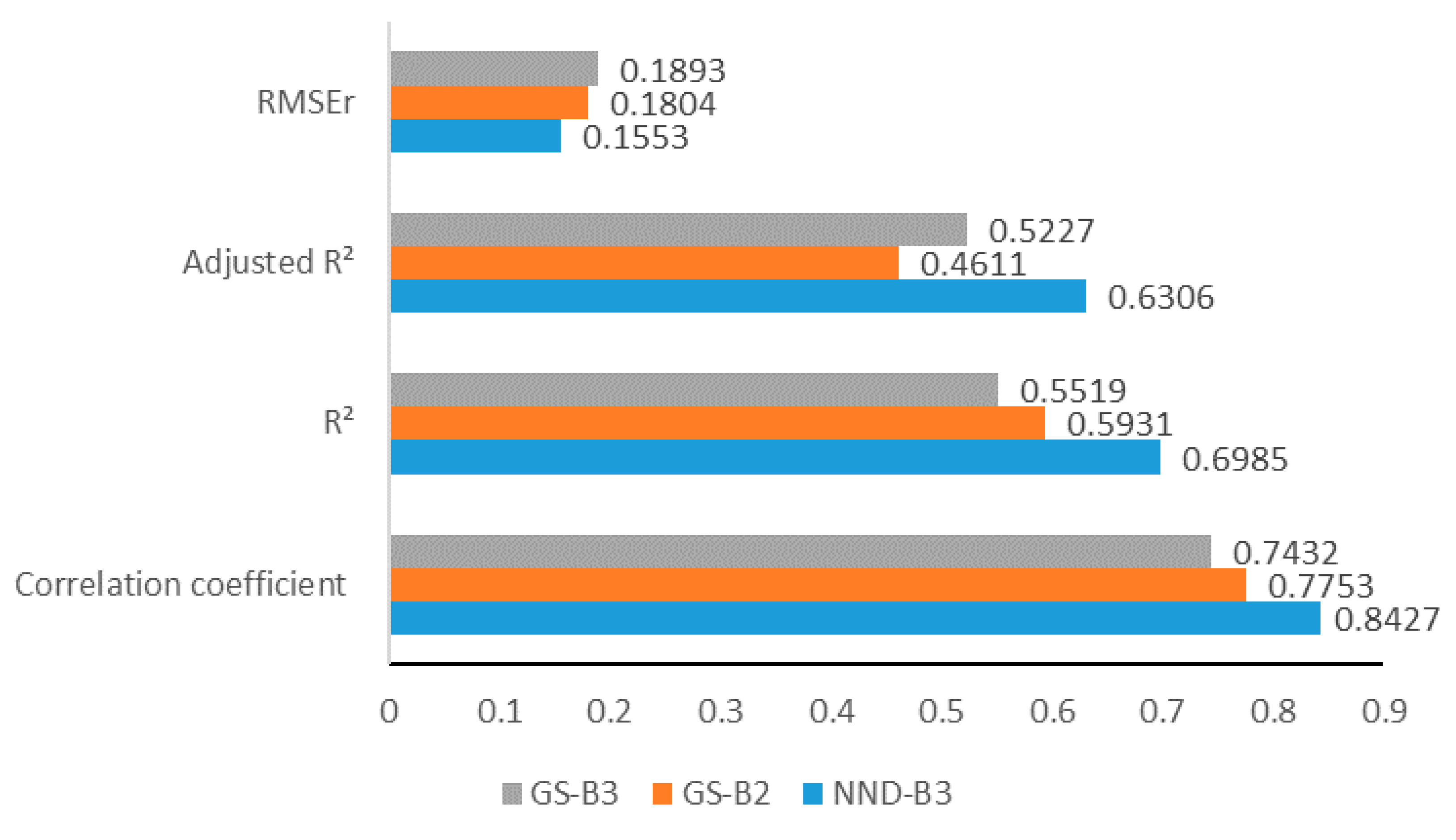
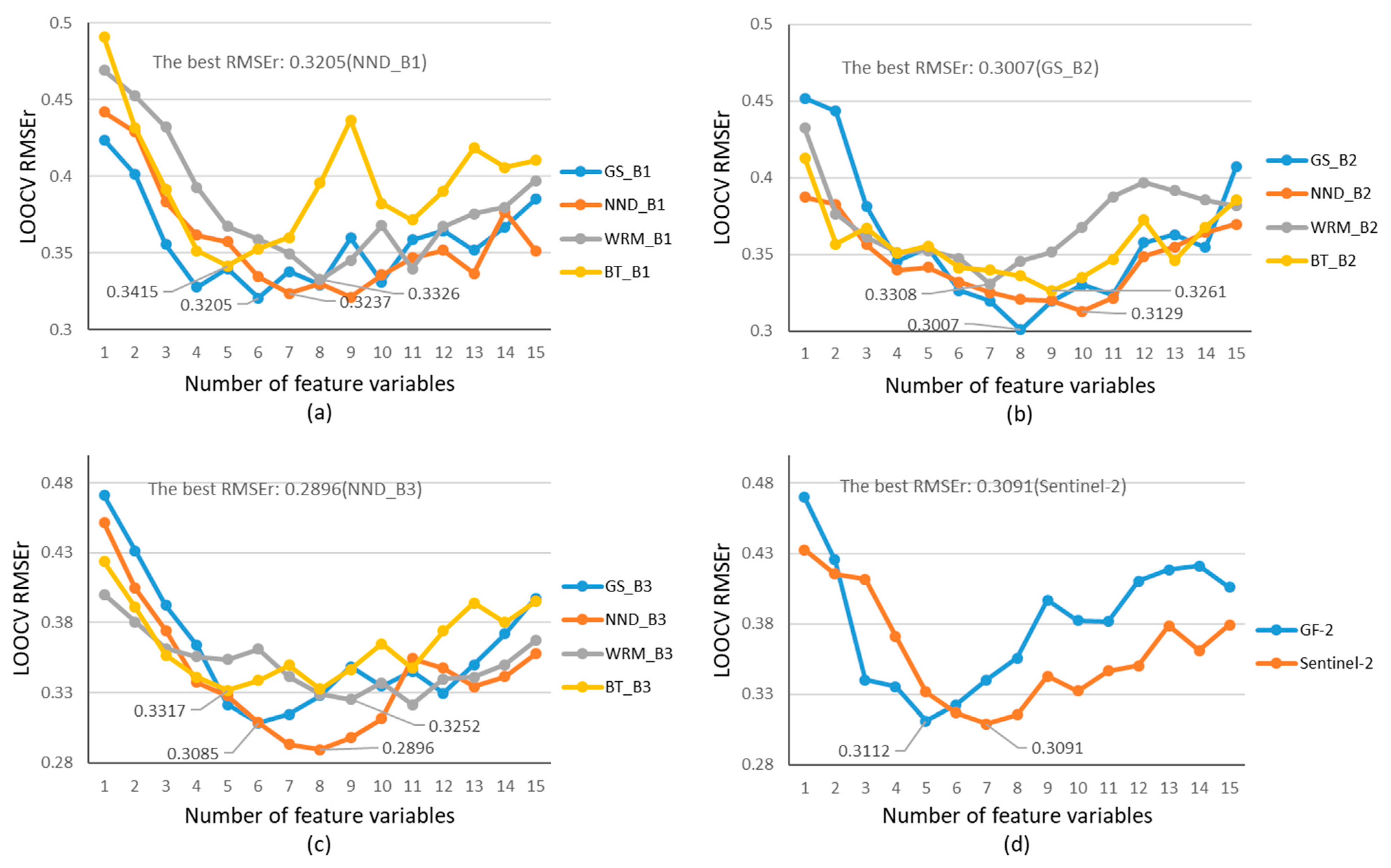
4.2. Selecting Best Fused Image for Forest AGB Estimation
4.3. Selection of Optimal Feature Combination from the Fused Image
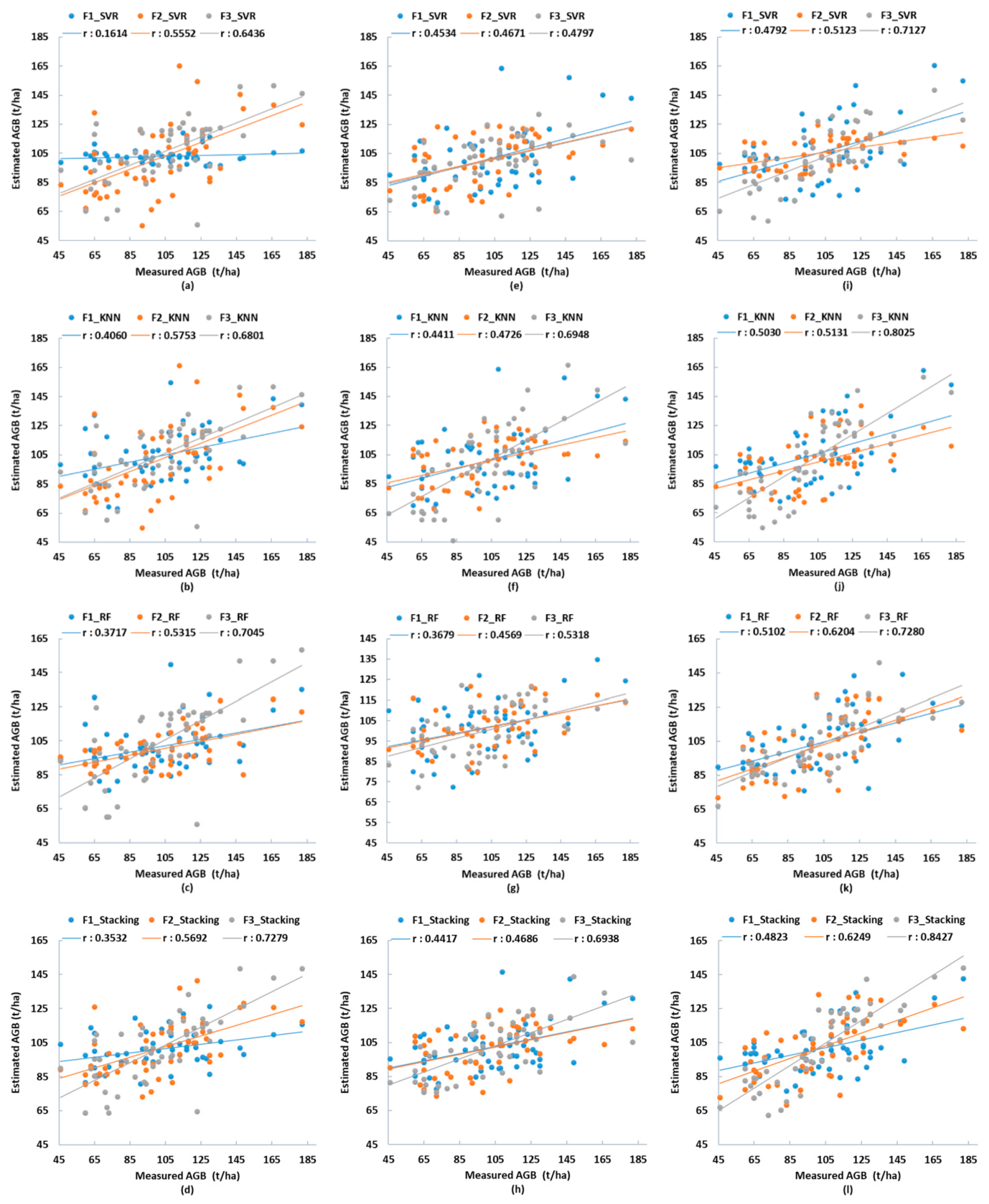
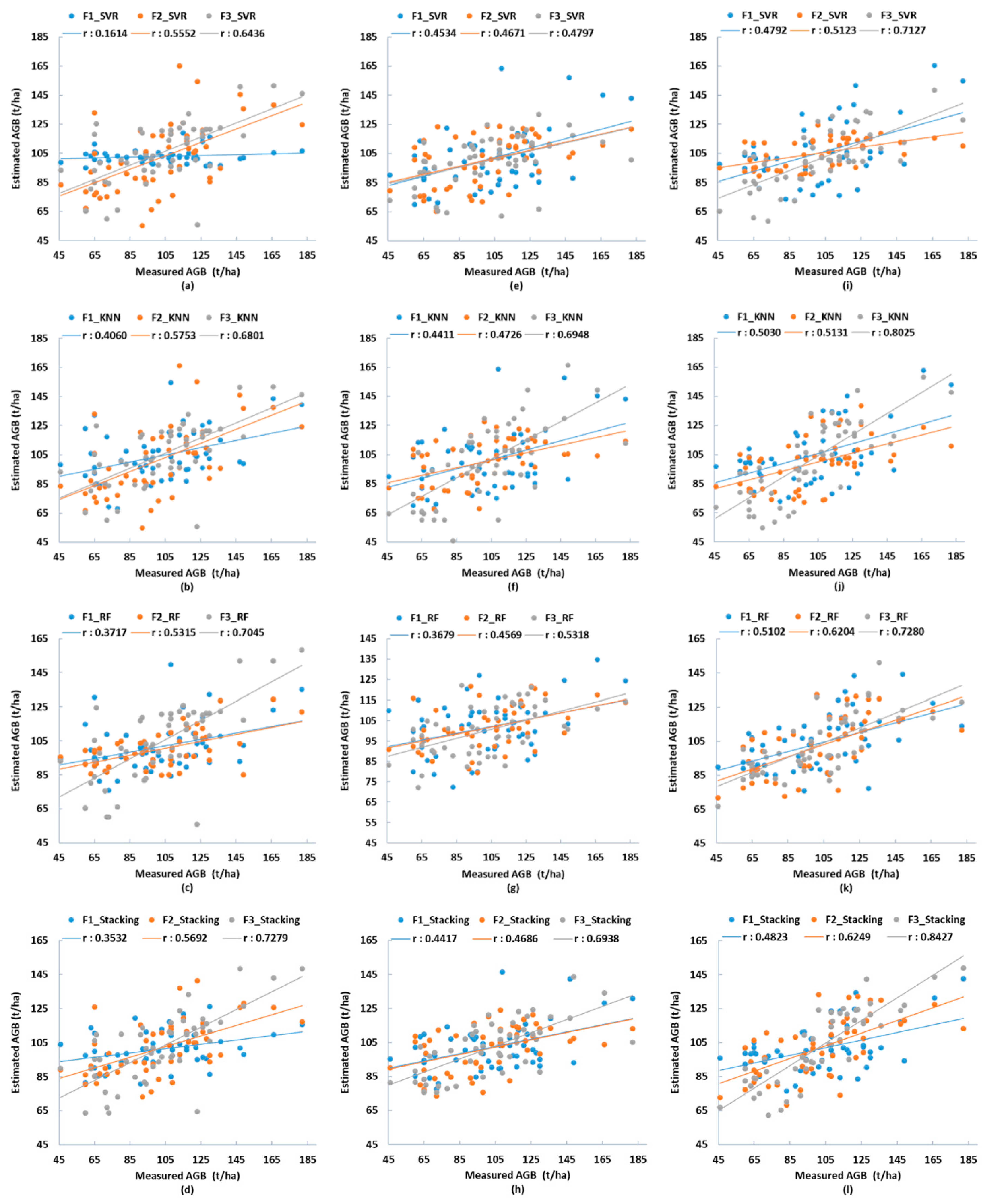
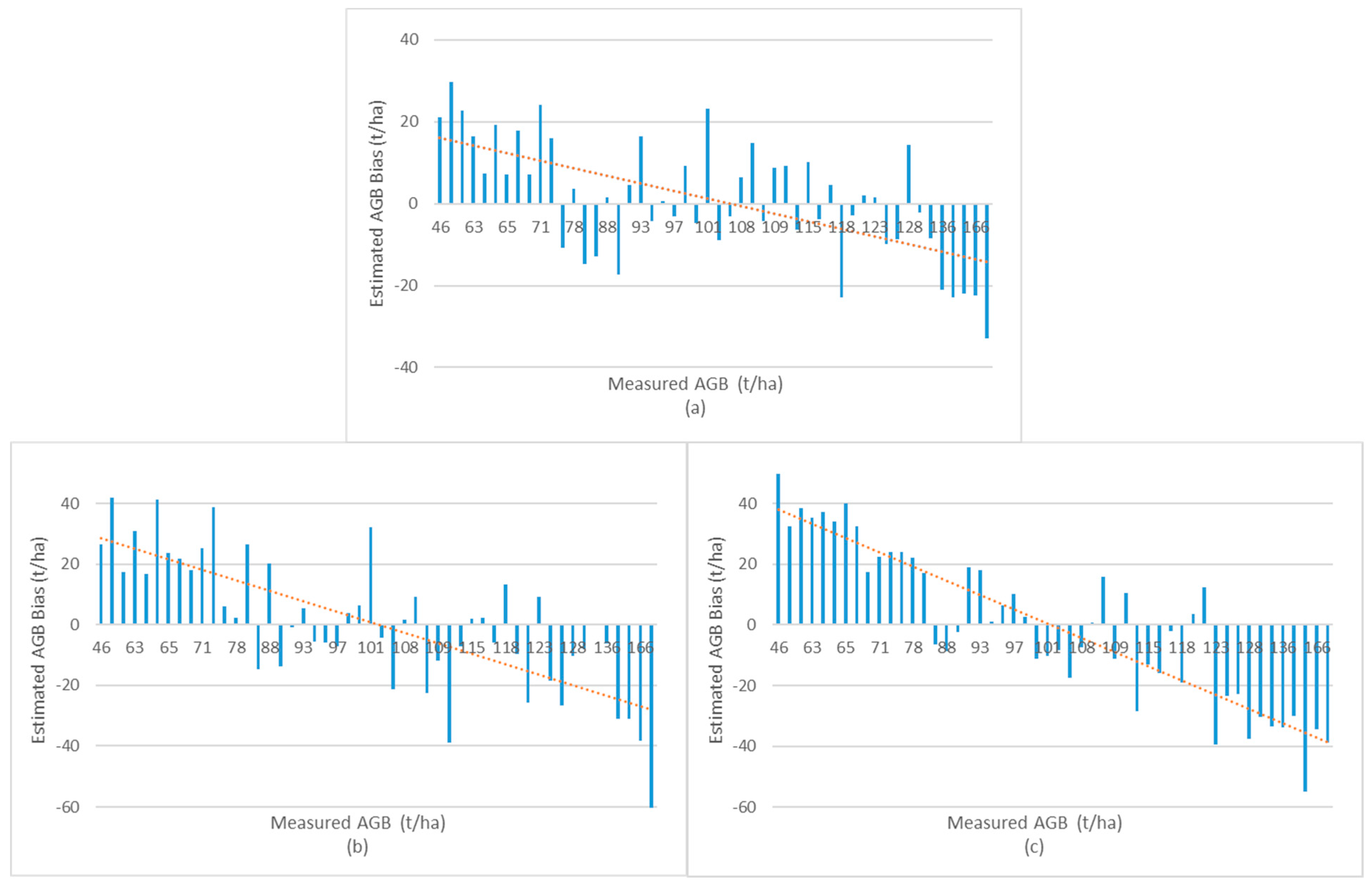
4.4. The AGB Estimation Result Analysis
4.5. The AGB Estimation Ability of Different Image Data Source
4.6. The Best Feature Selection Method for Different Data Scenarios and Different Estimation Models
4.7. AGB Estimation Performance of Different Feature Sets
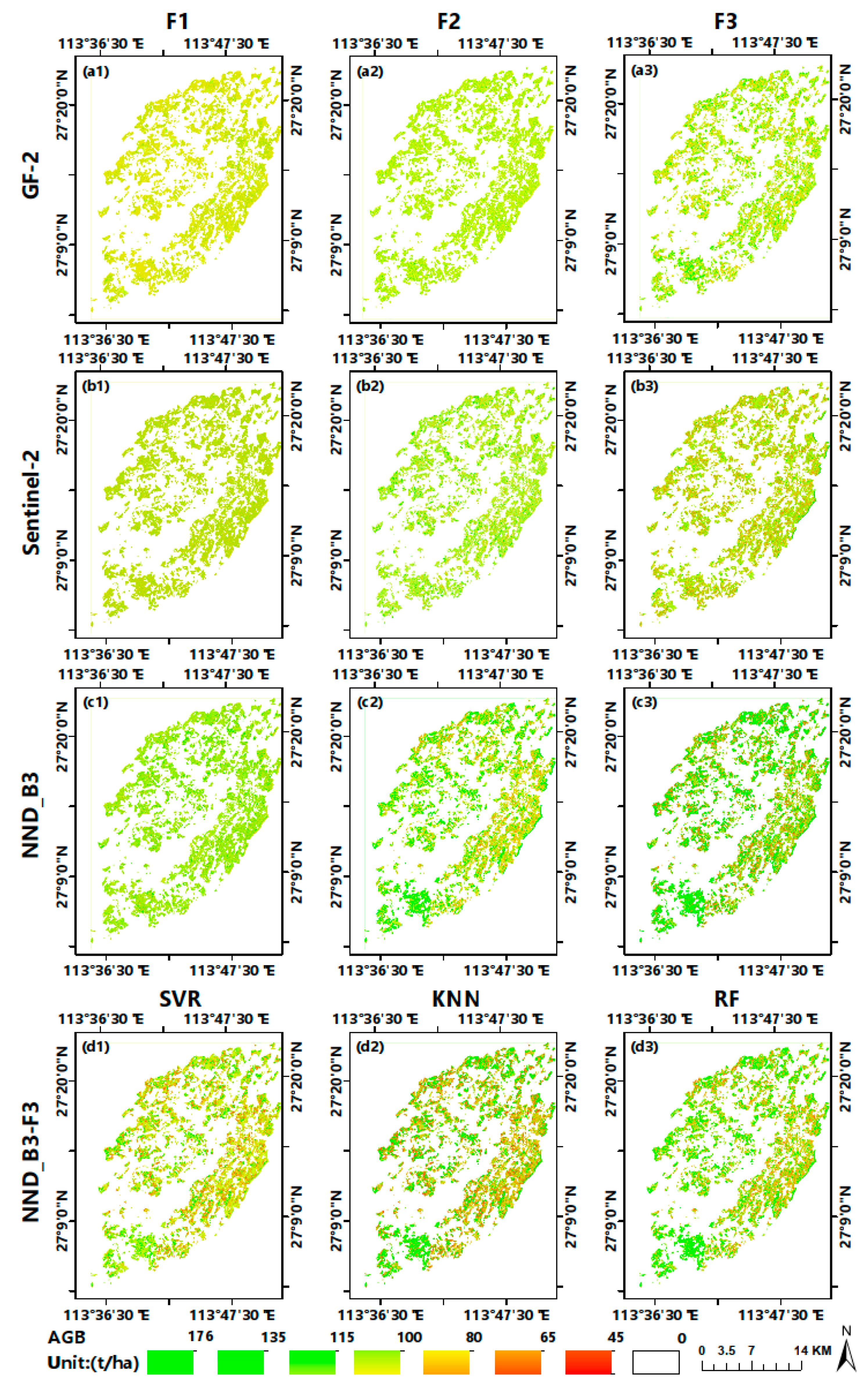
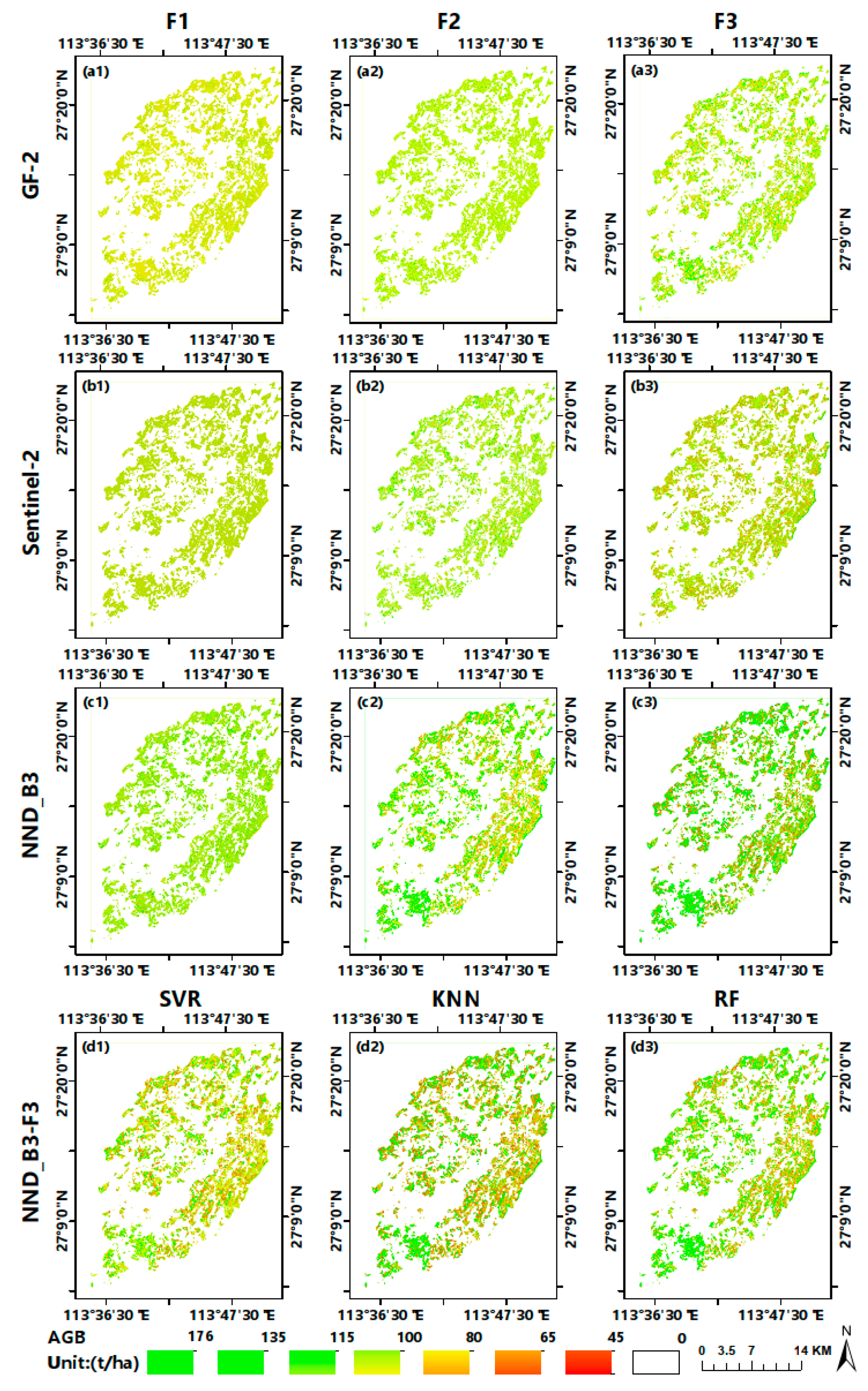
4.8. Prediction and Map of the AGB of Chinese fir Plantation in the Study Area
4.9. Limitations and Future Works
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Variable Sets | Assessment Indicators | GF-2 | Sentinel-2 | NND_B3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SVR | KNN | RF | Stacking | SVR | KNN | RF | Stacking | SVR | KNN | RF | Stacking | ||
| F1 | R2 | 0.0240 | 0.1176 | 0.1201 | 0.1242 | 0.1373 | 0.1112 | 0.1279 | 0.1923 | 0.1564 | 0.2148 | 0.2535 | 0.2326 |
| Adjusted R2 | −0.0628 | 0.0392 | 0.0419 | 0.0464 | 0.0606 | 0.0322 | 0.0504 | 0.1205 | 0.0814 | 0.1450 | 0.2048 | 0.1643 | |
| RMSE (t/ha) | 28.40 | 27.01 | 26.97 | 26.91 | 26.67 | 27.07 | 26.81 | 25.80 | 26.41 | 25.48 | 24.84 | 25.19 | |
| RMSEr (%) | 27.94 | 26.57 | 26.53 | 26.47 | 26.24 | 26.64 | 26.39 | 25.39 | 25.98 | 25.06 | 24.43 | 24.78 | |
| MAE (t/ha) | 22.50 | 21.52 | 21.40 | 21.26 | 21.71 | 22.08 | 22.70 | 21.48 | 23.16 | 22.14 | 20.15 | 21.33 | |
| F2 | R2 | 0.2324 | 0.2623 | 0.2573 | 0.3235 | 0.2014 | 0.2160 | 0.2025 | 0.2193 | 0.2214 | 0.2467 | 0.3832 | 0.3897 |
| Adjusted R2 | 0.1997 | 0.2309 | 0.1335 | 0.2947 | 0.0683 | 0.0853 | 0.0231 | 0.0892 | 0.0916 | 0.1211 | 0.2804 | 0.2880 | |
| RMSE (t/ha) | 25.19 | 24.69 | 24.78 | 23.65 | 25.66 | 25.42 | 25.64 | 25.37 | 25.37 | 24.95 | 22.58 | 22.46 | |
| RMSEr (%) | 24.78 | 24.29 | 24.37 | 23.26 | 25.25 | 25.02 | 25.23 | 24.97 | 24.96 | 24.55 | 22.21 | 22.09 | |
| MAE (t/ha) | 19.69 | 19.17 | 20.17 | 19.39 | 19.43 | 19.25 | 20.70 | 19.04 | 19.33 | 20.57 | 17.56 | 17.55 | |
| F3 | R2 | 0.3879 | 0.4470 | 0.4810 | 0.5296 | 0.2161 | 0.4266 | 0.2670 | 0.4643 | 0.5057 | 0.6340 | 0.5107 | 0.6985 |
| Adjusted R2 | 0.2859 | 0.3548 | 0.3945 | 0.4511 | 0.0631 | 0.3148 | 0.1020 | 0.3598 | 0.3944 | 0.5518 | 0.4292 | 0.6306 | |
| RMSE (t/ha) | 22.49 | 21.38 | 20.71 | 19.72 | 25.42 | 21.74 | 24.58 | 21.01 | 20.21 | 17.39 | 20.11 | 15.79 | |
| RMSEr (%) | 22.13 | 21.03 | 20.37 | 19.40 | 25.02 | 21.40 | 24.19 | 20.68 | 19.88 | 17.11 | 19.78 | 15.53 | |
| MAE (t/ha) | 16.96 | 16.24 | 15.42 | 15.17 | 19.30 | 17.15 | 19.47 | 15.97 | 16.13 | 13.72 | 15.78 | 12.55 | |
References
- Doyog, N.D.; Lin, C.; Lee, Y.; Lumbres, R.I.C.; Daipan, B.P.O.; Bayer, D.C.; Parian, C.P. Diagnosing pristine pine forest development through pansharpened-surface-reflectance Landsat image derived aboveground biomass productivity. For. Ecol. Manag. 2021, 487, 119011. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Jones, S.D.; Soto-Berelov, M.; Haywood, A.; Hislop, S. Monitoring aboveground forest biomass dynamics over three decades using Landsat time-series and single-date inventory data. Int. J. Appl. Earth Obs. Geoinf. 2020, 84, 101952. [Google Scholar] [CrossRef]
- Purohit, S.; Aggarwal, S.P.; Patel, N.R. Estimation of forest aboveground biomass using combination of Landsat 8 and Sentinel-1A data with random forest regression algorithm in Himalayan Foothills. Trop. Ecol. 2021, 62, 288–300. [Google Scholar] [CrossRef]
- Asner, G.P.; Powell, G.; Mascaro, J.; Knapp, D.E.; Clark, J.K.; Jacobson, J.; Kennedy-Bowdoin, T.; Balaji, A.; Paez-Acosta, G.; Victoria, E.; et al. High-resolution forest carbon stocks and emissions in the amazon. Proc. Natl. Acad. Sci. USA 2010, 107, 16738–16742. [Google Scholar] [CrossRef] [Green Version]
- Bogan, S.A.; Antonarakis, A.S.; Moorcroft, P.R. Imaging spectrometry-derived estimates of regional ecosystem composition for the Sierra Nevada, California. Remote Sens. Environ. 2019, 228, 14–30. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Hartig, F.; Latifi, H.; Berger, C.; Hernández, J.; Corvalán, P.; Koch, B. Importance of sample size, data type and prediction method for remote sensing-based estimations of aboveground forest biomass. Remote Sens. Environ. 2014, 154, 102–114. [Google Scholar] [CrossRef]
- Khan, M.R.; Khan, I.A.; Baig, M.H.A.; Liu, Z.J.; Ashraf, M.I. Exploring the potential of Sentinel-2A satellite data for aboveground biomass estimation in fragmented Himalayan subtropical pine forest. J. Mt. Sci. 2020, 17, 2880–2896. [Google Scholar] [CrossRef]
- Caughlin, T.T.; Barber, C.; Asner, G.P.; Glenn, N.F.; Bohlman, S.A.; Wilson, C.H. Monitoring tropical forest succession at landscape scales despite uncertainty in Landsat time series. Ecol. Appl. 2020, 31, e02208. [Google Scholar] [CrossRef] [PubMed]
- Hudak, A.T.; Fekety, P.A.; Kane, V.R.; Kennedy, R.E.; Filippelli, S.K.; Falkowski, M.J.; Tinkham, W.T.; Smith, A.M.S.; Crookston, N.L.; Domke, G.M.; et al. A carbon monitoring system for mapping regional, annual aboveground biomass across the northwestern USA. Environ. Res. Lett. 2020, 15, 095003. [Google Scholar] [CrossRef]
- Cooper, S.; Okujeni, A.; Pflugmacher, D.; Linden, S.V.D.; Hostert, P. Combining simulated hyperspectral EnMAP and Landsat time series for forest aboveground biomass mapping. Int. J. Appl. Earth Obs. 2021, 98, 102307. [Google Scholar] [CrossRef]
- Lalit, K.; Onisimo, M. Remote Sensing of Above-Ground Biomass. Remote Sens. 2017, 9, 935. [Google Scholar] [CrossRef] [Green Version]
- Bilous, A.; Myroniuk, A.; Holiaka, D.; Bilous, S.; See, L.; Schepaschenko, D. Mapping growing stock volume and forest live biomass: A case study of the Polissya region of Ukraine. Environ. Res. Lett. 2017, 12, 105001. [Google Scholar] [CrossRef] [Green Version]
- Dube, T.; Mutanga, O. The impact of integrating WorldView-2 sensor and environmental variables in estimating plantation forest species aboveground biomass and carbon stocks in uMgeni Catchment, South Africa. ISPRS J. Photogramm. Remote Sens. 2016, 119, 415–425. [Google Scholar] [CrossRef]
- Sinha, S.; Jeganathan, C.; Sharma, L.K.; Nathawat, M.S. A review of radar remote sensing for biomass estimation. Int. J. Environ. Sci. Technol. 2015, 12, 1779–1792. [Google Scholar] [CrossRef] [Green Version]
- Nafiseh, G.; Reza, S.; Ali, M. A review on biomass estimation methods using synthetic aperture radar data. Int. J. Geomat. Geosci. 2011, 1, 776–788. [Google Scholar]
- Solberg, S.; Næsset, E.; Gobakken, T.; Bollandsås, O. Forest Biomass Change Estimated from Height Change in Interferometric SAR Height Models. Carbon Balance Manag. 2014, 9, 5. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Laurin, G.V.; Battles, J.J.; Saah, D. Integration of Airborne Lidar and Vegetation Types Derived from Aerial Photography for Mapping Aboveground Live Biomass. Remote Sens. Environ. 2012, 121, 108–117. [Google Scholar] [CrossRef]
- Chen, Y.; Li, L.; Lu, D.; Li, D. Exploring bamboo forest aboveground biomass estimation using Sentinel-2 data. Remote Sens. 2019, 11, 7. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Lu, D.; Li, G.; Wang, G.; Chen, Q.; Liu, L.; Li, D. Comparative analysis of modeling algorithms for forest aboveground biomass estimation in a subtropical region. Remote Sens. 2018, 10, 627. [Google Scholar] [CrossRef] [Green Version]
- Lu, D.; Chen, Q.; Wang, G.; Li, G.; Moran, E. A survey of remote sensing-based aboveground biomass estimation methods in forest ecosystems. Int. J. Digit. Earth 2016, 9, 63–105. [Google Scholar] [CrossRef]
- Albarakat, R.; Lakshmi, V. Comparison of Normalized Difference Vegetation Index Derived from Landsat, MODIS, and AVHRR for the Mesopotamian Marshes Between 2002 and 2018. Remote Sens. 2019, 11, 1245. [Google Scholar] [CrossRef] [Green Version]
- Macedo, F.; Sousa, A.M.O.; Gonçalves, A.C.; da Silva, J.R.M.; Marques, P.A.; Rodrigues, R.A.F. Above-ground biomass estimation for Quercus rotundifolia using vegetation indices derived from high spatial resolution satellite images. Eur. J. Remote Sens. 2018, 51, 932–944. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Xie, Z.; Jiang, X.; Lu, D.; Chen, E. Integration of ZiYuan-3 Multispectral and Stereo Data for Modeling Aboveground Biomass of Larch Plantations in North China. Remote Sens. 2019, 11, 2328. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Liu, Z.; Lin, H.; Wang, G.; Sun, H.; Long, J.; Zhang, M. Estimating the Growing Stem Volume of Chinese Pine and Larch Plantations based on Fused Optical Data Using an Improved Variable Screening Method and Stacking Algorithm. Remote Sens. 2020, 12, 871. [Google Scholar] [CrossRef] [Green Version]
- Awad, M.M. Forest mapping: A comparison between hyperspectral and multispectral images and technologies. J. For. Res. 2018, 29, 1395–1405. [Google Scholar] [CrossRef]
- Yang, H.; Li, F.; Wang, W.; Yu, K. Estimating Above-Ground Biomass of Potato Using Random Forest and Optimized Hyperspectral Indices. Remote Sens. 2021, 13, 2339. [Google Scholar] [CrossRef]
- Zhang, H.; Zhu, J.; Wang, C.; Lin, H.; Long, J.; Zhao, L.; Fu, H.; Liu, Z. Forest Growing Stock Volume Estimation in Subtropical Mountain Areas Using PALSAR-2 L-Band PolSAR Data. Forests 2019, 10, 276. [Google Scholar] [CrossRef] [Green Version]
- Santoro, M.; Beaudoin, A.; Beer, C.; Cartus, O.; Fransson, J.E.S.; Hall, R.J.; Pathe, C.; Schmullius, C.; Schepaschenko, D.; Shvidenko, A.; et al. Forest growing stock volume of the northern hemisphere: Spatially explicit estimates for 2010 derived from Envisat ASAR. Remote Sens. Environ. 2015, 168, 316–334. [Google Scholar] [CrossRef]
- Long, J.; Lin, H.; Wang, G.; Sun, H.; Yan, E. Mapping Growing Stem Volume of Chinese Fir Plantation Using a Saturation-based Multivariate Method and Quad-polarimetric SAR Images. Remote Sens. 2019, 11, 1872. [Google Scholar] [CrossRef] [Green Version]
- Soja, M.J.; Quegan, S.; d’Alessandro, M.M.; Banda, F.; Scipal, K.; Tebaldini, S.; Ulander, L.M.H. Mapping above-ground biomass in tropical forests with ground-cancelled P-band SAR and limited reference data. Remote Sens. Environ. 2021, 253, 112153. [Google Scholar] [CrossRef]
- Muumbe, T.P.; Baade, J.; Singh, J.; Schmullius, C.; Thau, C. Terrestrial Laser Scanning for Vegetation Analyses with a Special Focus on Savannas. Remote Sens. 2021, 13, 507. [Google Scholar] [CrossRef]
- Zhang, Y.; Shao, Z. Assessing of Urban Vegetation Biomass in Combination with LiDAR and High-resolution Remote Sensing Images. Int. J. Remote Sens. 2021, 42, 964–985. [Google Scholar] [CrossRef]
- Fu, L.; Liu, Q.; Sun, H.; Wang, S.; Li, Z.; Chen, E.; Pang, Y.; Song, X.; Wang, G. Development of a System of Compatible Individual Tree Diameter and Aboveground Biomass Prediction Models Using Error-In-Variable Regression and Airborne LiDAR Data. Remote Sens. 2018, 10, 325. [Google Scholar] [CrossRef] [Green Version]
- Belgiu, M.; Dragut, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- He, Q.; Chen, E.; Ru, A.; Li, Y. Above-Ground Biomass and Biomass Components Estimation Using LiDAR Data in a Coniferous Forest. Forests 2013, 4, 984–1002. [Google Scholar] [CrossRef] [Green Version]
- Garc í a-Guti é rrez, J.; Martínez-álvarez, F.; Troncoso, A.; Riquelme, J.C. A comparison of machine learning regression techniques for lidar-derived estimation of forest variables. Neurocomputing 2015, 167, 24–31. [Google Scholar] [CrossRef]
- Shao, Z.; Zhang, L.; Wang, L. Stacked Sparse Autoencoder Modeling Using the Synergy of Airborne LiDAR and Satellite Optical and SAR Data to Map Forest Above-Ground Biomass. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5569–5582. [Google Scholar] [CrossRef]
- Lu, D. The Potential and Challenge of Remote Sensing-based Biomass Estimation. Int. J. Remote Sens. 2006, 27, 1297–1328. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, K.; Myint, S.W.; Du, Z.; Wu, Z. Integration of GF2 Optical, GF3 SAR, and UAV Data for Estimating Aboveground Biomass of China’s Largest Artificially Planted Mangroves. Remote Sens. 2020, 12, 2039. [Google Scholar] [CrossRef]
- Ehlers, M.; Klonus, S.; Åstrand, P.J.; Rosso, P. Multi-sensor Image Fusion for Pansharpening in Remote Sensing. Int. J. Image Data Fusion 2010, 1, 25–45. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Daloye, A.M.; Erkbol, H.; Fritschi, F.B. Crop Monitoring Using Satellite/UAV Data Fusion and Machine Learning. Remote Sens. 2020, 12, 1357. [Google Scholar] [CrossRef]
- Zhang, J. Multi-source Remote Sensing Data Fusion: Status and Trends. Int. J. Image Data Fusion 2010, 1, 5–24. [Google Scholar] [CrossRef] [Green Version]
- Chrysafis, I.; Mallinis, G.; Gitas, I.; Tsakiri-Strati, M. Estimating Mediterranean forest parameters using multi seasonal Landsat 8 OLI imagery and an ensemble learning method. Remote Sens. Environ. 2017, 199, 154–166. [Google Scholar] [CrossRef]
- Puliti, S.; Saarela, S.; Gobakken, T.; Stahl, G.; Naesset, E. Combining UAV and Sentinel-2 auxiliary data for forest growing stock volume estimation through hierarchical model-based inference. Remote Sens. Environ. 2018, 204, 485–497. [Google Scholar] [CrossRef]
- Vafaei, S.; Soosani, J.; Adeli, K.; Fadaei, H.; Naghavi, H.; Pham, T.D.; Bui, D.T. Improving Accuracy Estimation of Forest Aboveground Biomass Based on Incorporation of ALOS-2 PALSAR-2 and Sentinel-2A Imagery and Machine Learning: A Case Study of the Hyrcanian Forest Area (Iran). Remote Sens. 2018, 10, 172. [Google Scholar] [CrossRef] [Green Version]
- Rasel, S.M.M.; Chang, H.C.; Ralph, T.J.; Saintilan, N.; Diti, I.J. Application of feature selection methods and machine learning algorithms for saltmarsh biomass estimation using Worldview-2 imagery. Geocarto Int. 2019, 36, 1075–1099. [Google Scholar] [CrossRef]
- Zhao, Q.; Yu, S.; Zhao, F.; Tian, L.; Zhao, Z. Comparison of machine learning algorithms for forest parameter estimations and application for forest quality assessments. For. Ecol. Manag. 2019, 434, 224–234. [Google Scholar] [CrossRef]
- Pham, T.D.; Yokoya, N.; Xia, J.; Ha, N.T.; Le, N.N.; Nguyen, T.T.T.; Dao, T.H.; Vu, T.T.P.; Pham, T.D.; Takeuchi, W. Comparison of Machine Learning Methods for Estimating Mangrove Above-Ground Biomass Using Multiple Source Remote Sens. Data in the Red River Delta Biosphere Reserve, Vietnam. Remote Sens. 2020, 12, 1334. [Google Scholar] [CrossRef] [Green Version]
- López-Serrano, P.M.; López-Sánchez, C.A.; Álvarez-González, J.G.; García-Gutiérrez, J. A Comparison of Machine Learning Techniques Applied to Landsat-5 TM Spectral Data for Biomass Estimation. Can. J. Remote Sens. 2016, 42, 690–705. [Google Scholar] [CrossRef]
- Wu, C.; Chen, Y.; Peng, C.; Li, Z.; Hong, X. Modeling and estimating aboveground biomass of Dacrydium pierrei in China using machine learning with climate change. J. Environ. Manag. 2019, 234, 167–179. [Google Scholar] [CrossRef]
- Xie, Z.; Chen, Y.; Lu, D.; Li, G.; Chen, E. Classification of Land Cover, Forest, and Tree Species Classes with ZiYuan-3 Multispectral and Stereo Data. Remote Sens. 2019, 11, 164. [Google Scholar] [CrossRef] [Green Version]
- Luo, M.; Wang, Y.; Xie, Y.; Zhou, L.; Qiao, J.; Qiu, S.; Sun, Y. Combination of Feature Selection and CatBoost for Prediction: The First Application to the Estimation of Aboveground Biomass. Forests 2021, 12, 216. [Google Scholar] [CrossRef]
- Li, X.; Long, J.; Zhang, M.; Liu, Z.; Lin, H. Coniferous Plantations Growing Stock Volume Estimation Using Advanced Remote Sensing Algorithms and Various Fused Data. Remote Sens. 2021, 13, 3468. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, J.; Liang, S.; Li, X.; Li, M. An evaluation of eight machine learning regression algorithms for forest aboveground biomass estimation from multiple satellite data products. Remote Sens. 2020, 12, 4015. [Google Scholar] [CrossRef]
- Wang, J.; Xu, J.; Peng, Y.; Wang, H.; Shen, J. Prediction of forest unit volume based on hybrid feature selection and ensemble learning. Evol. Intell. 2019, 13, 21–32. [Google Scholar] [CrossRef]
- Cai, Y.; Li, X.; Zhang, M.; Lin, H. Mapping wetland using the object-based stacked generalization method based on multi-temporal optical and SAR data. Int. J. Appl. Earth Obs. Geoinf. 2020, 92, 102164. [Google Scholar] [CrossRef]
- Wolpert, D.H. Stacked generalization. Neural Netw. 2017, 5, 241–259. [Google Scholar] [CrossRef]
- Fu, Y.; Lei, Y.C.; Zeng, W.S. Uncertainty analysis for regional-level above-ground biomass estimates based on individual tree biomass model. Acta Ecol. Sin. 2015, 35, 7738–7747. [Google Scholar] [CrossRef]
- Li, X.; Lin, H.; Long, J.; Xu, X. Mapping the growing stem volume of the coniferous plantations in North China using multispectral data from integrated GF-2 and Sentinel-2 images and an optimized Feature variable selection method. Remote Sens. 2021, 13, 2740. [Google Scholar] [CrossRef]
- Nakaji, T.; Ide, R.; Oguma, H.; Saigusa, N.; Fujinuma, Y. Utility of spectral vegetation index for estimation of gross CO2 flux under varied sky conditions. Remote Sens. Environ. 2007, 109, 274–284. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef] [Green Version]
- Ettazarini, S. GIS-based land suitability assessment for check dam site location, using topography and drainage information: A case study from Morocco. Environ. Earth Sci. 2021, 80, 567. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Y.; Ren, C.; Zhang, B.; Wang, Z. Optimal Combination of Predictors and Algorithms for Forest Above-Ground Biomass Mapping from Sentinel and SRTM Data. Remote Sens. 2019, 11, 414. [Google Scholar] [CrossRef] [Green Version]
- Yang, P.; Liao, X.; Cheng, H.; Shuai, M.; Xie, Y. A comparative study of remote sensing image fusion methods based on spectral gradient angle and spectral information divergence index. Eng. Surv. Mapp. 2018, 27, 51–55. [Google Scholar] [CrossRef]
- Zhao, P.; Lu, D.; Wang, G.; Wu, C.; Huang, Y.; Yu, S. Examining spectral reflectance saturation in Landsat imagery and corresponding solutions to improve forest aboveground biomass estimation. Remote Sens. 2016, 8, 469. [Google Scholar] [CrossRef] [Green Version]

| Equation | a | b | c | Remarks |
|---|---|---|---|---|
| (1) | 1.988 | 0.591 | D: DBH H: Tree Height |
| Age Group | Number of Plots | Value Range | Mean | Standard Deviation | Coefficient of Variation (%) |
|---|---|---|---|---|---|
| Immature | 11 | 46–126 | 84.91 | 28.16 | 33.16 |
| Near Mature | 17 | 60–128 | 89.59 | 18.96 | 21.16 |
| Mature | 14 | 66–182 | 117.57 | 32.10 | 27.30 |
| Over mature | 8 | 101–149 | 122.5 | 15.43 | 12.60 |
| Total | 50 | 46–182 | 101.66 | 29.04 | 28.57 |
| Vegetation Indices | Equation | Reference |
|---|---|---|
| Normalized difference vegetation index | [58] | |
| Similar normalized difference vegetation indices | [24] | |
| Simple two-band ratios | [58] | |
| Enhanced vegetation index | [60] | |
| Difference vegetation indices | [23] | |
| Soil adjusted vegetation indices | [24] | |
| Atmospherically resistant vegetation index | [61] | |
| Modified simple ratio | [58] |
| Feature Variable Sets | Description | |||
|---|---|---|---|---|
| F3 | F2 | F1 | Band Reflectivity | Band1_Blue, Band2_Green, Band3_Red, Band4_Vegetation Red Edge1(VRE1), Band5_Vegetation Red Edge2(VRE2), Band6_Vegetation Red Edge3(VRE3), Band7_NIR, Band8_Vegetation Red Edge4(VRE4), Band9_SWIR1, Band10_SWIR2 |
| Vegetation Index | NDVI, NDVIi_j, RVIi_j,DVIi_j, EVI, SAVIk, ARVI, MSR | |||
| texture factors with the window size of 3 × 3 | TWI, Elevation, Slope, Aspect, Blue, Green, Red, Red Edge1, Red Edge2, Red Edge3, NIR, Red Edge4, SWIR1, SWIR2 | |||
| texture factors with the window size of (5 × 5, 7 × 7, 9 × 9) | ||||
| Data Scenarios | Gray Mean | Standard Deviation | Average Gradient | Entropy | RMSEr | ||
|---|---|---|---|---|---|---|---|
| Fused image | B1 | GS | 0.9399 * | 0.6824 | 0.7165 | 0.4259 | 0.5954 |
| NND | 0.7375 | 0.6039 | 0.7216 | 1.0000 * | 0.6069 | ||
| WRM | 0.9978 * | 0.8157 * | 0.8144 | 0.7778 * | 0.8285 | ||
| BT | 0.0389 | 0.0314 | 0.0000 | 0.5185 | 1.0000 | ||
| B2 | GS | 0.8799 | 0.8431 * | 0.8866 * | 0.1667 | 0.2139* | |
| NND | 0.6941 | 0.7333 | 0.7526 | 0.2778 | 0.4489 | ||
| WRM | 1.0000 * | 0.8039 * | 0.7990 | 0.2222 | 0.7938 | ||
| BT | 0.0367 | 0.0000 | 0.1082 | 0.1852 | 0.7033 | ||
| B3 | GS | 0.7987 | 1.0000 * | 1.0000 * | 0.8704 * | 0.3642 * | |
| NND | 0.7030 | 0.9725 * | 0.9381 * | 0.8184 * | 0.0000 * | ||
| WRM | 0.9822 * | 0.8431 * | 0.8711 * | 0.0000 | 0.6127 | ||
| BT | 0.0000 | 0.0000 | 0.1546 | 0.6111 | 0.8112 | ||
| Unfused image | GF-2 | 0.8120 | 0.6549 | 0.7320 | 0.5370 | 0.4162 | |
| Sentinel-2 | 0.9933 * | 0.4275 | 0.6753 | 0.7593 * | 0.3757 * | ||
| Feature Variable Sets | Methods | Selected Variables |
|---|---|---|
| F1 | KNN-base | DVI1_10, DVI1_3, MSR, ARVI |
| RFR-base | NDVI6_10, DVI2_10, DVI5_8 | |
| F2 | KNN-base | DVI1_10, DVI1_3, SWIR2_W3_S |
| RFR-base | RVI1_6, Blue_W3_V, Blue_W3_Con, Green_W3_Con, Red_W3_D, TWI_W3_S, VRE3_W3_H | |
| F3 | KNN-base | Green_W9_Con, Blue_W3_Con, Blue_W7_V, Blue_W3_Cor, Red_W3_D, Elevation_W5_Cor, Green_W5_E, RVI1_4, VRE1_W5_E |
| RFR-base | NDVI6_7, Blue_W3_V, Blue_W3_Con, Red_W3_D, VRE2_W3_H, Blue_W5_D, VRE1_W5_S |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Zhang, M.; Long, J.; Lin, H. A Novel Method for Estimating Spatial Distribution of Forest Above-Ground Biomass Based on Multispectral Fusion Data and Ensemble Learning Algorithm. Remote Sens. 2021, 13, 3910. https://doi.org/10.3390/rs13193910
Li X, Zhang M, Long J, Lin H. A Novel Method for Estimating Spatial Distribution of Forest Above-Ground Biomass Based on Multispectral Fusion Data and Ensemble Learning Algorithm. Remote Sensing. 2021; 13(19):3910. https://doi.org/10.3390/rs13193910
Chicago/Turabian StyleLi, Xinyu, Meng Zhang, Jiangping Long, and Hui Lin. 2021. "A Novel Method for Estimating Spatial Distribution of Forest Above-Ground Biomass Based on Multispectral Fusion Data and Ensemble Learning Algorithm" Remote Sensing 13, no. 19: 3910. https://doi.org/10.3390/rs13193910
APA StyleLi, X., Zhang, M., Long, J., & Lin, H. (2021). A Novel Method for Estimating Spatial Distribution of Forest Above-Ground Biomass Based on Multispectral Fusion Data and Ensemble Learning Algorithm. Remote Sensing, 13(19), 3910. https://doi.org/10.3390/rs13193910