
Soil Moisture Retrieval over a Vegetation-Covered Area Using ALOS-2 L-Band Synthetic Aperture Radar Data




Abstract
:1. Introduction
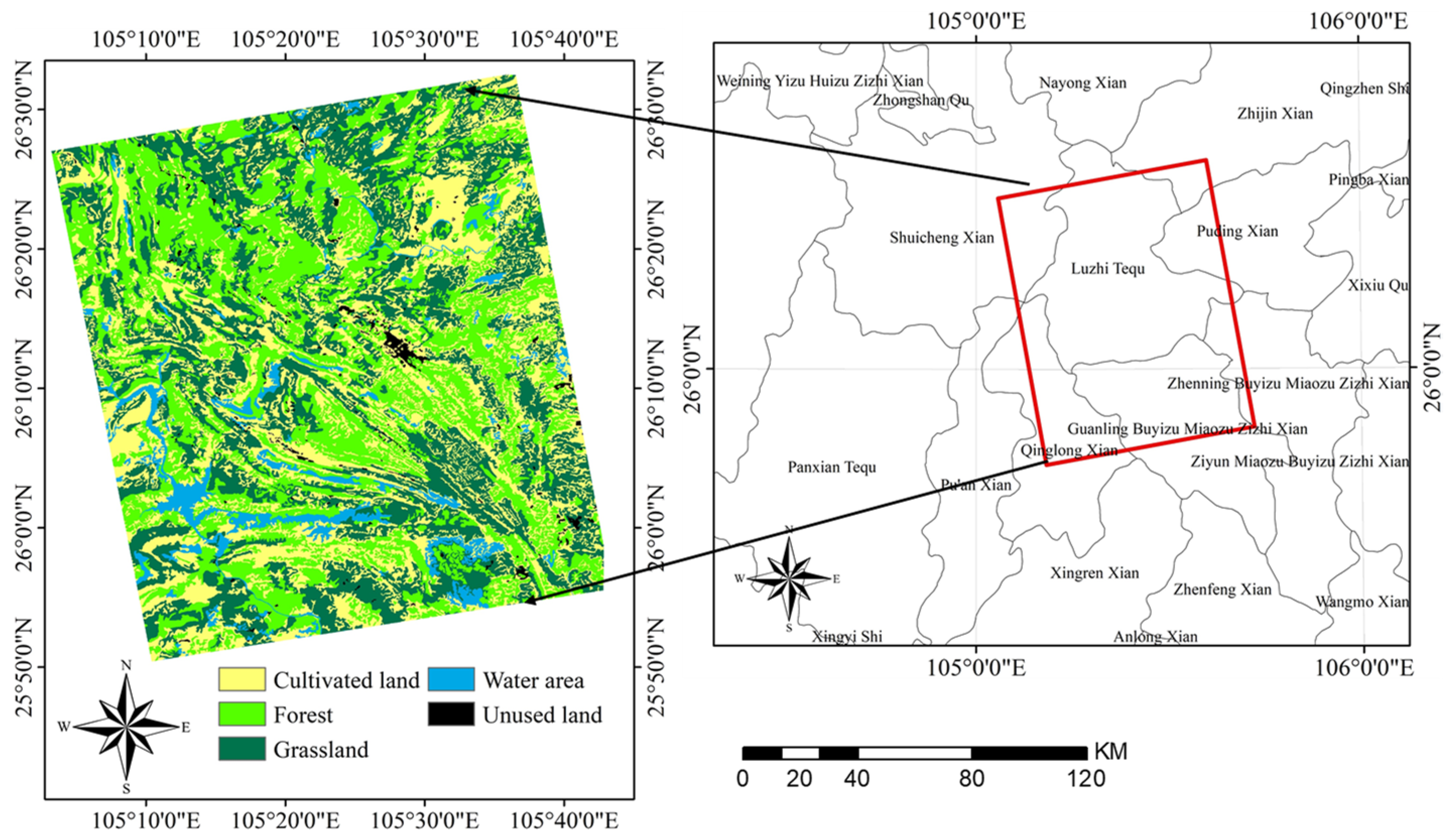
2. Study Area
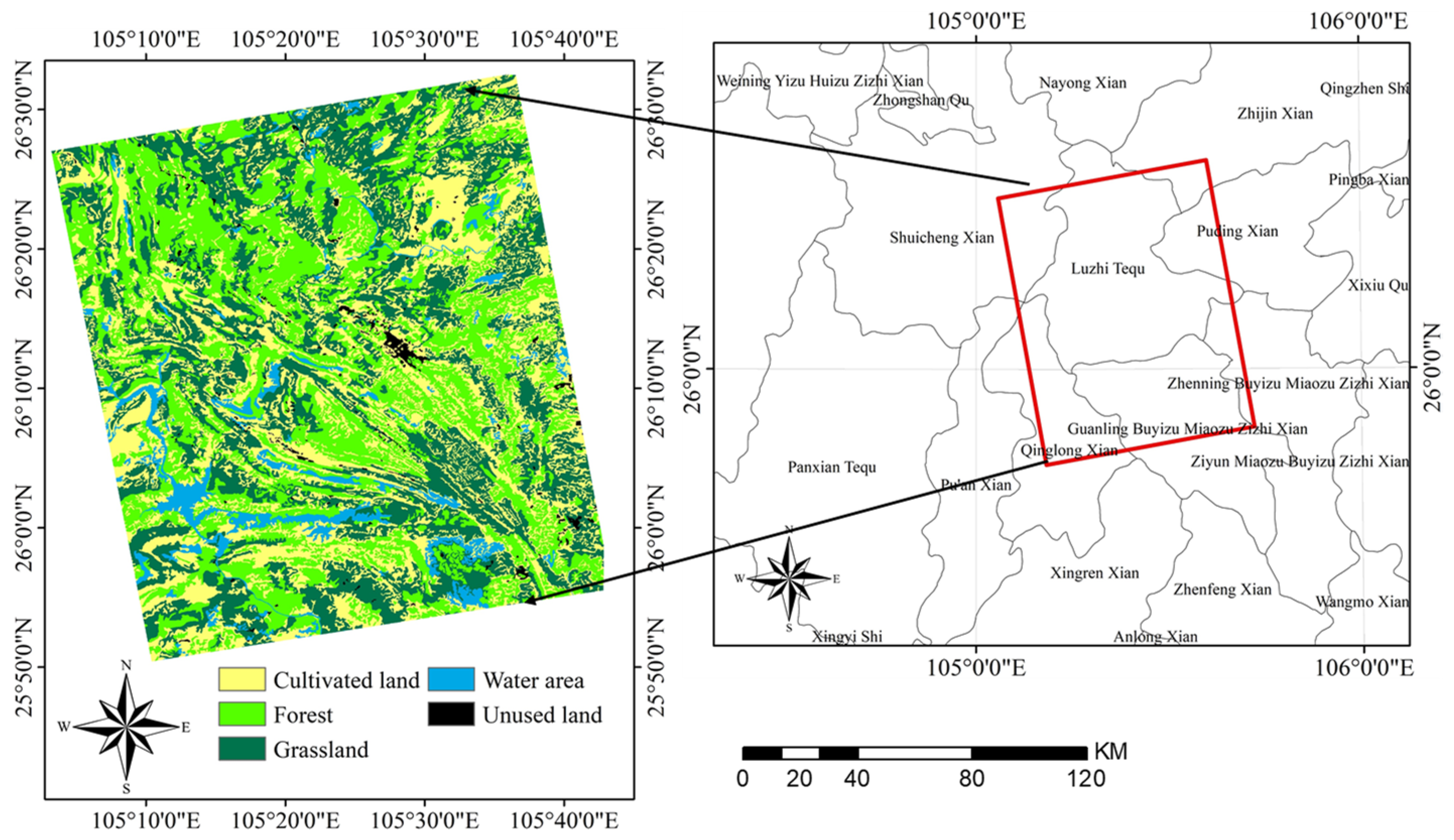
2.1. Study Area
2.2. Radar Data
2.3. Optical Data
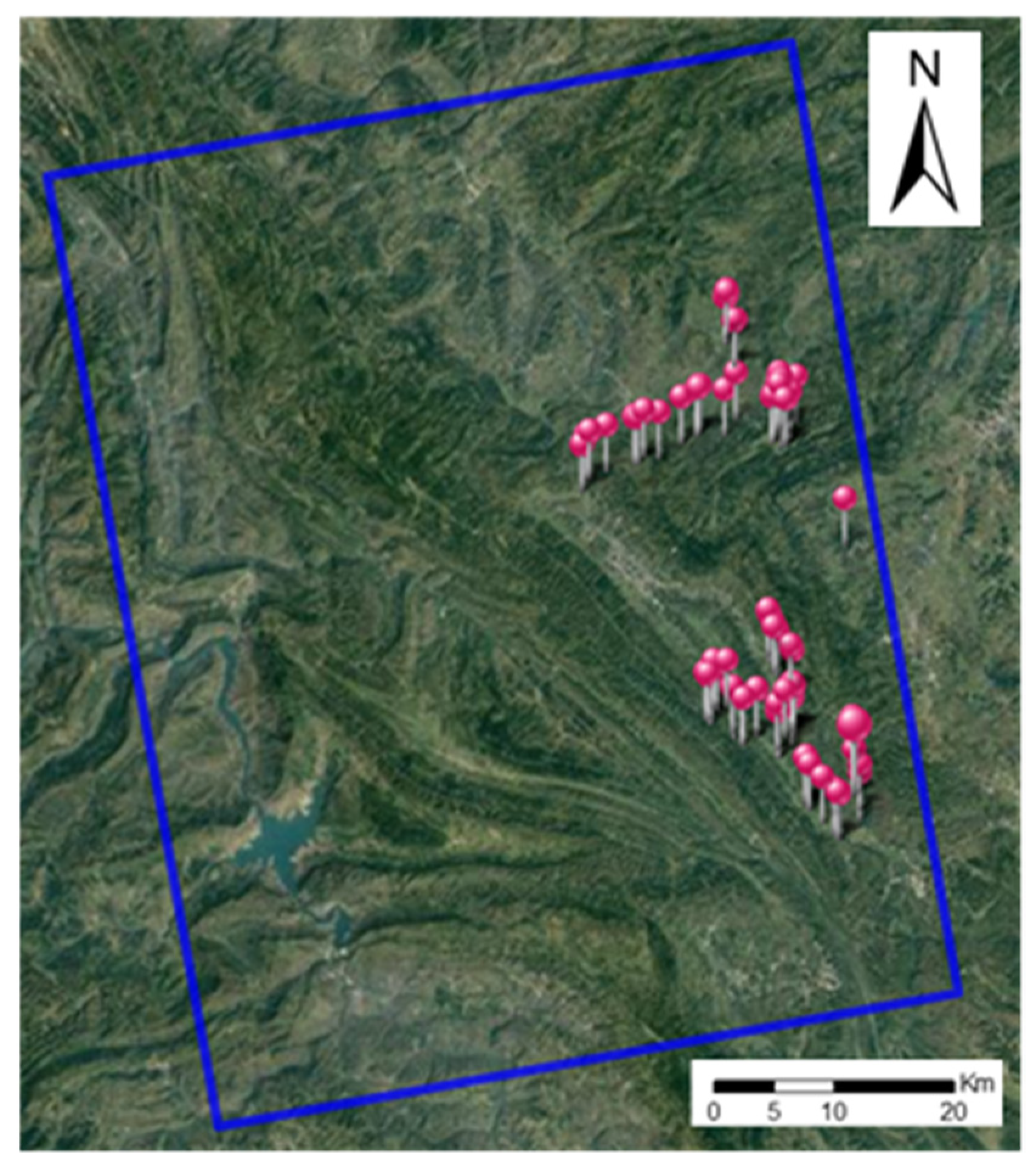
2.4. In Situ Measurements
3. Methods
3.1. GA-BP Neural Network
3.1.1. Genetic Algorithm (GA)
3.1.2. Back Propagation (BP) Neural Network
3.2. Soil Moisture Retrieval
- (1)
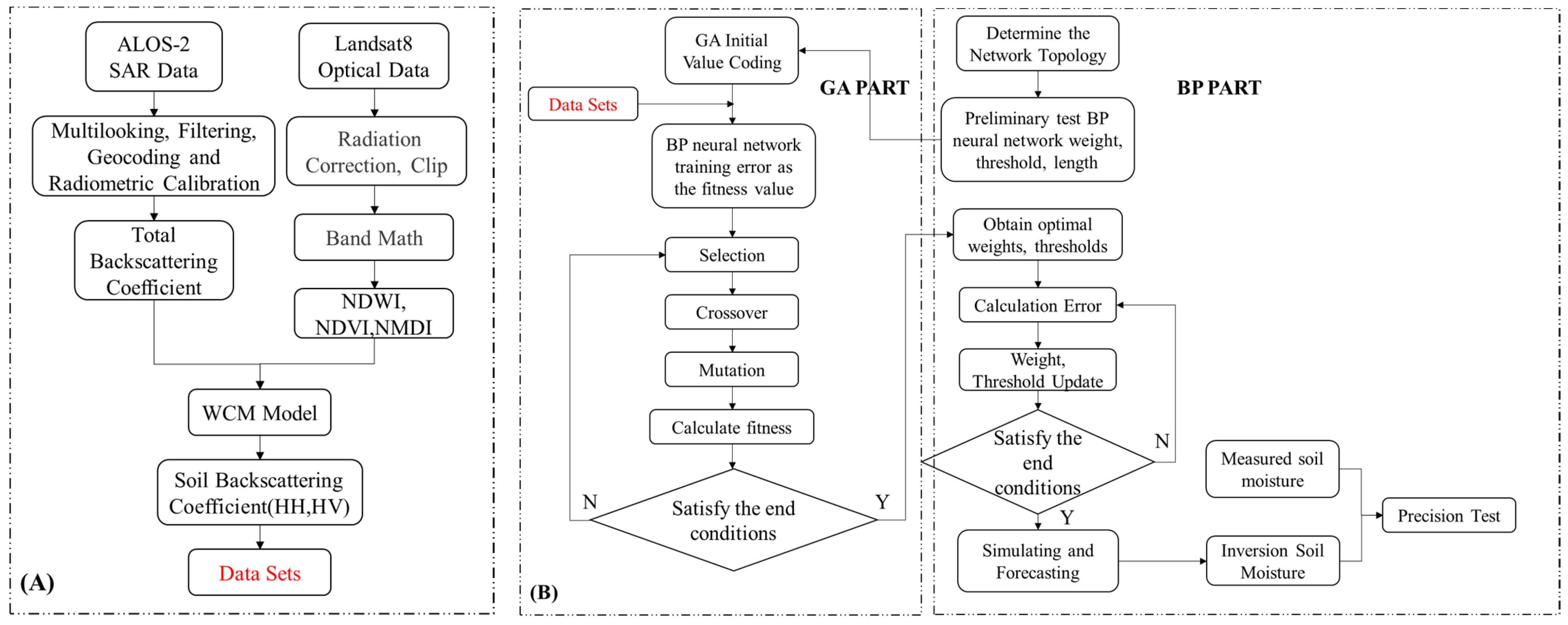
- The BP neural network consists of three layers. The layers are completely interconnected, with each layer having layers of simple processing units (neurons). The input data information is assigned to the input layer, multiplied, and forwarded through a weighting factor, and a deviation is added to the hidden layer. The output layer neurons obtained by the control are considered the input values of the output layer [27]. In this study, based on the data, we will set two inputs and one output. The soil backscattering coefficient under different polarizations (HH, HV), excluding the influence of vegetation, was used as input. These synthetic SAR backscatter datasets are obtained from the WCM. The parameterization uses soil volumetric moisture, vegetation descriptors, and incident angle values as input variables to simulate the backscatter coefficient of HH and HV polarization.Only parameters that can be easily estimated from optical images, such as the NDVI, the NDWI, and the NMDI, were considered in the generation of the synthetic dataset. When the WCM was coupled with the surface scattering model used to retrieve SM under vegetation cover, the separation of the vegetation-scattering contribution was mainly through synchronous optical data or auxiliary data measured on the ground. However, there is no unified standard for vegetation parameterization at present, and there is no theoretical basis to support which vegetation parameter can effectively and accurately represent vegetation scattering. Therefore, different vegetation parameters are used to characterize the contribution of vegetation scattering.This paper aims at the estimation of SM under vegetation cover. Therefore, before the active microwave method is used to retrieve SM, the data should be firstly downscaled. According to the resampling method, the radar backscattering coefficient, with a resolution of 3 m, is downscaled to the backscattering coefficient with a resolution of 30 m, and the total backscattering coefficient of the vegetation-covered surfaces under HH and HV polarization is obtained, respectively.The WCM model is parameterized. Firstly, the least-square method was used to estimate parameters A and B by fitting the model based on the ground-truthed measurements (Equations (7)–(9)). Among them, the parameters of V1 and V2 were described by the NDVI, the NDWI, and the NMDI, and the incident angle was obtained from the radar image. With parameters A and B, it becomes possible to predict the WCM components (, , and ) and, consequently, the total backscattering coefficient () using one vegetation descriptor and the SM values as inputs in the WCM.
- (2)
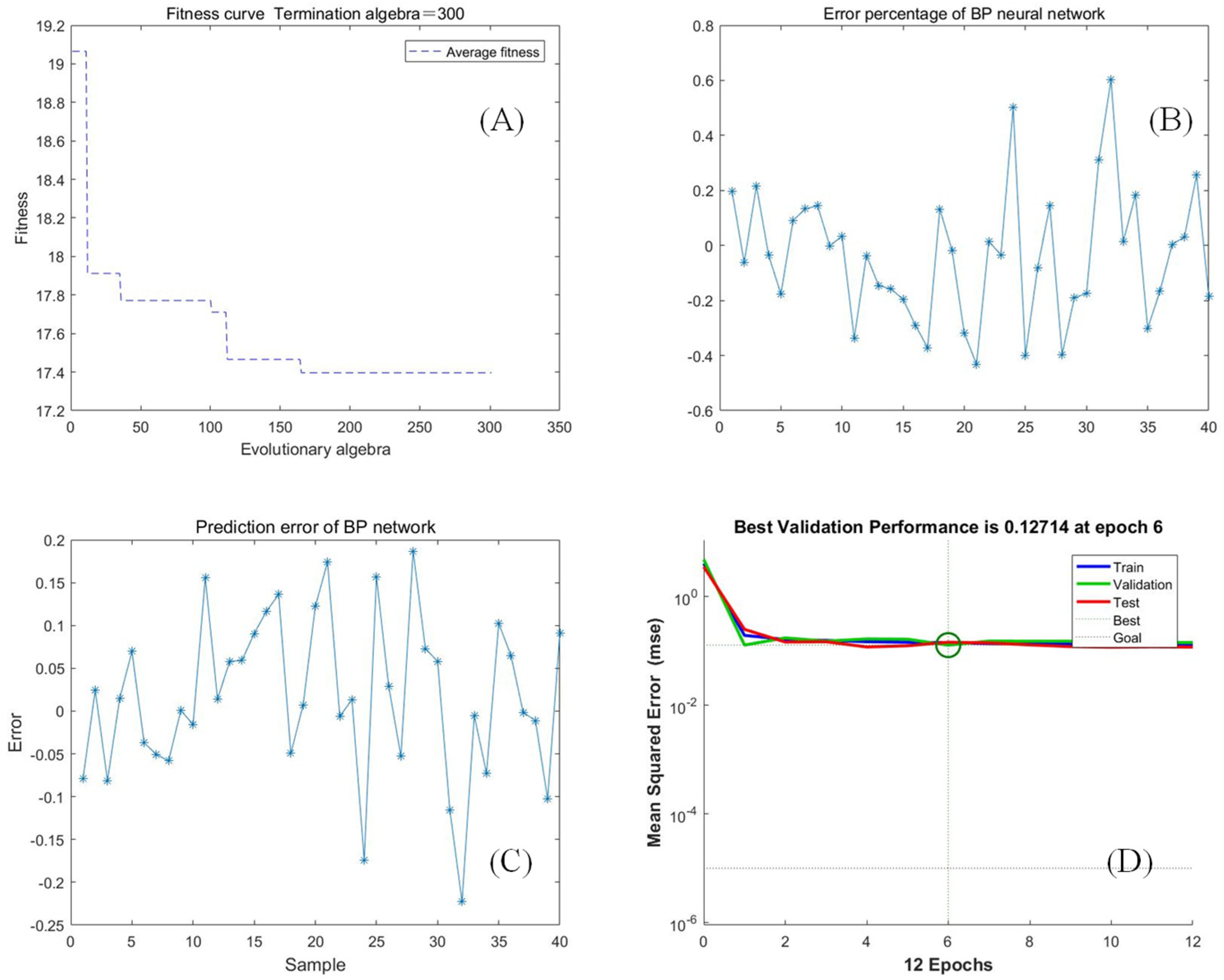
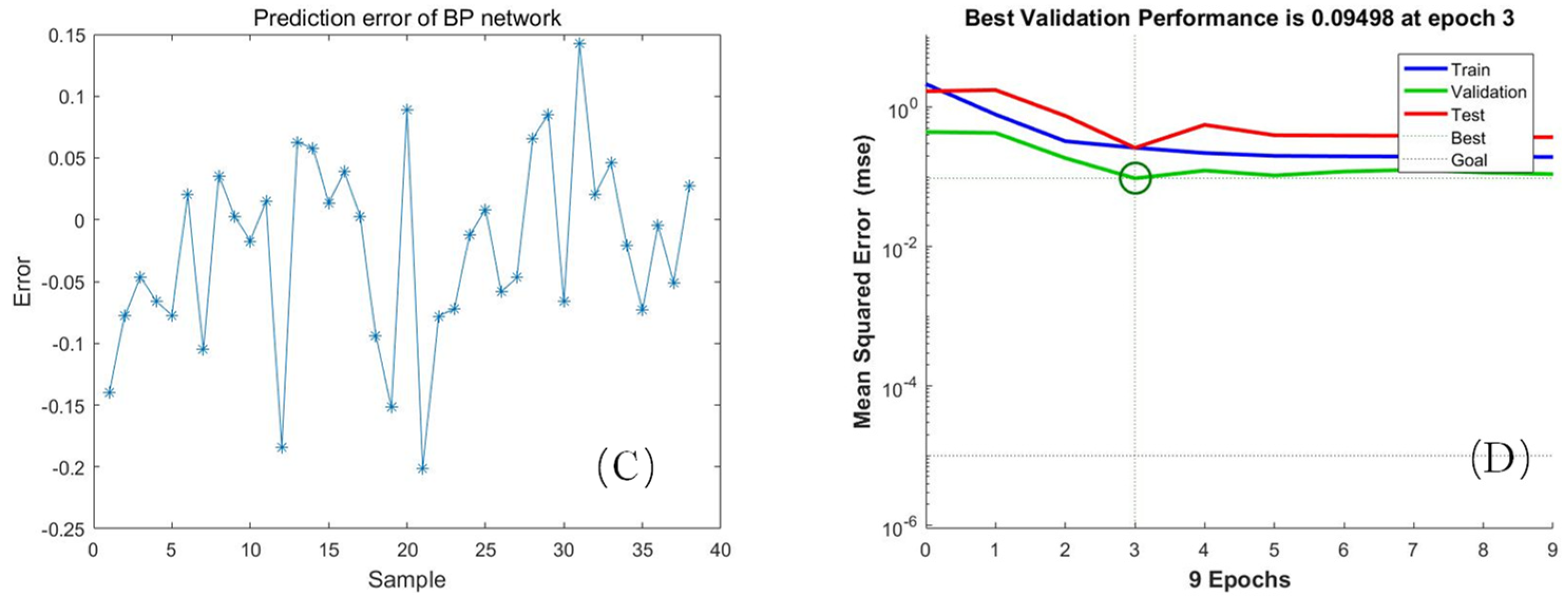
- GA was used to optimize the weight and threshold of the BP neural network. Each individual in the population contained a network ownership value and threshold. The individual calculated the individual fitness value through a fitness function, and the genetic algorithm found the corresponding individual with the optimal fitness value through selection, crossover, and mutation operations.
- (3)
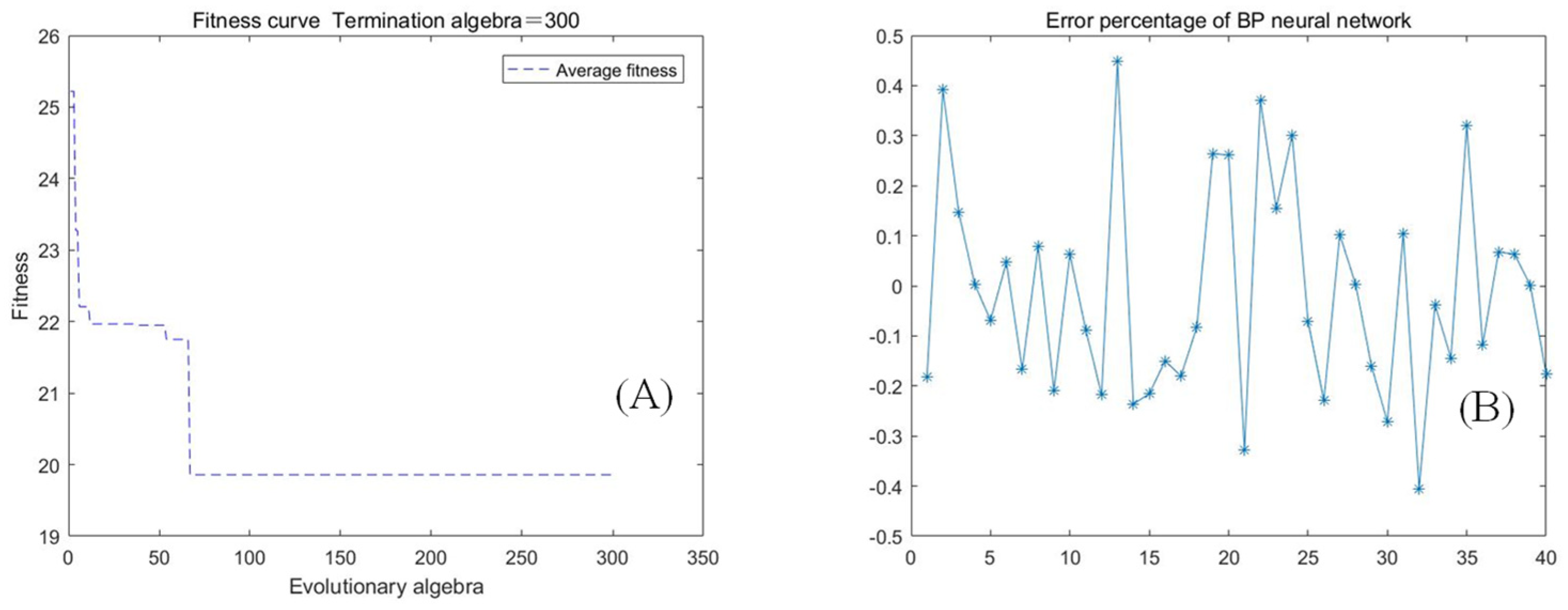
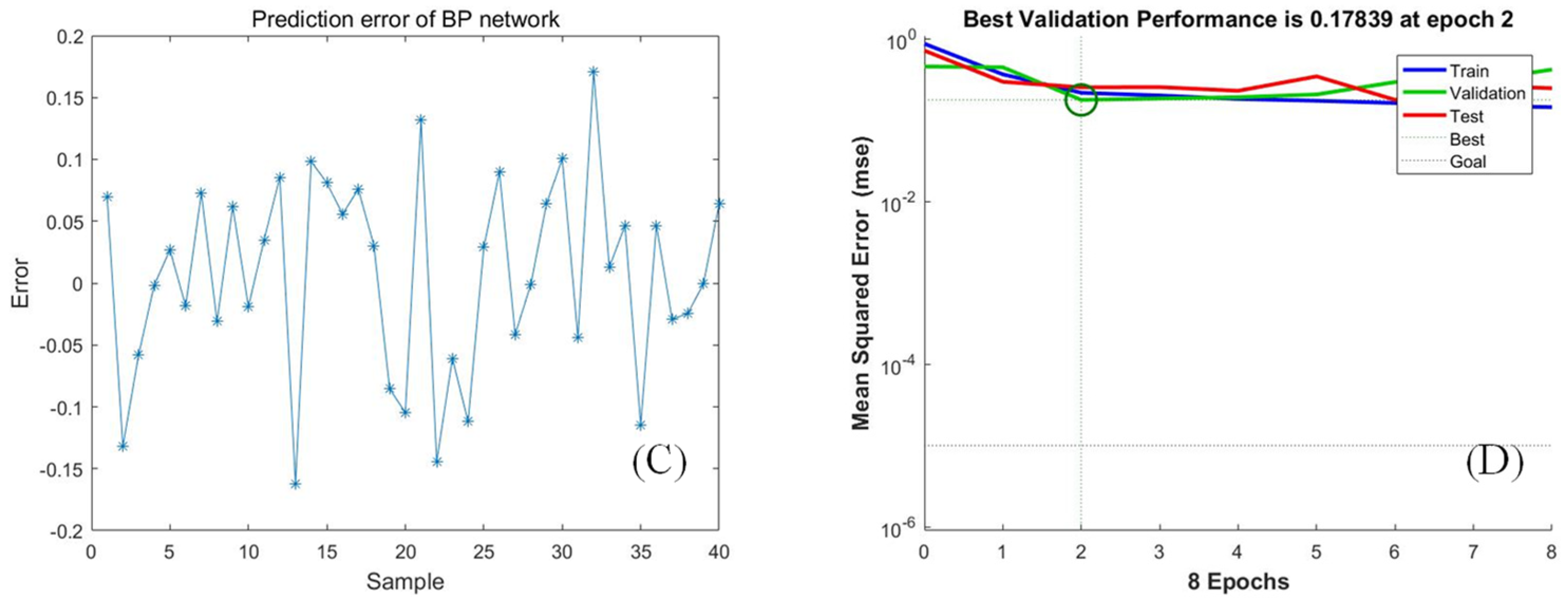
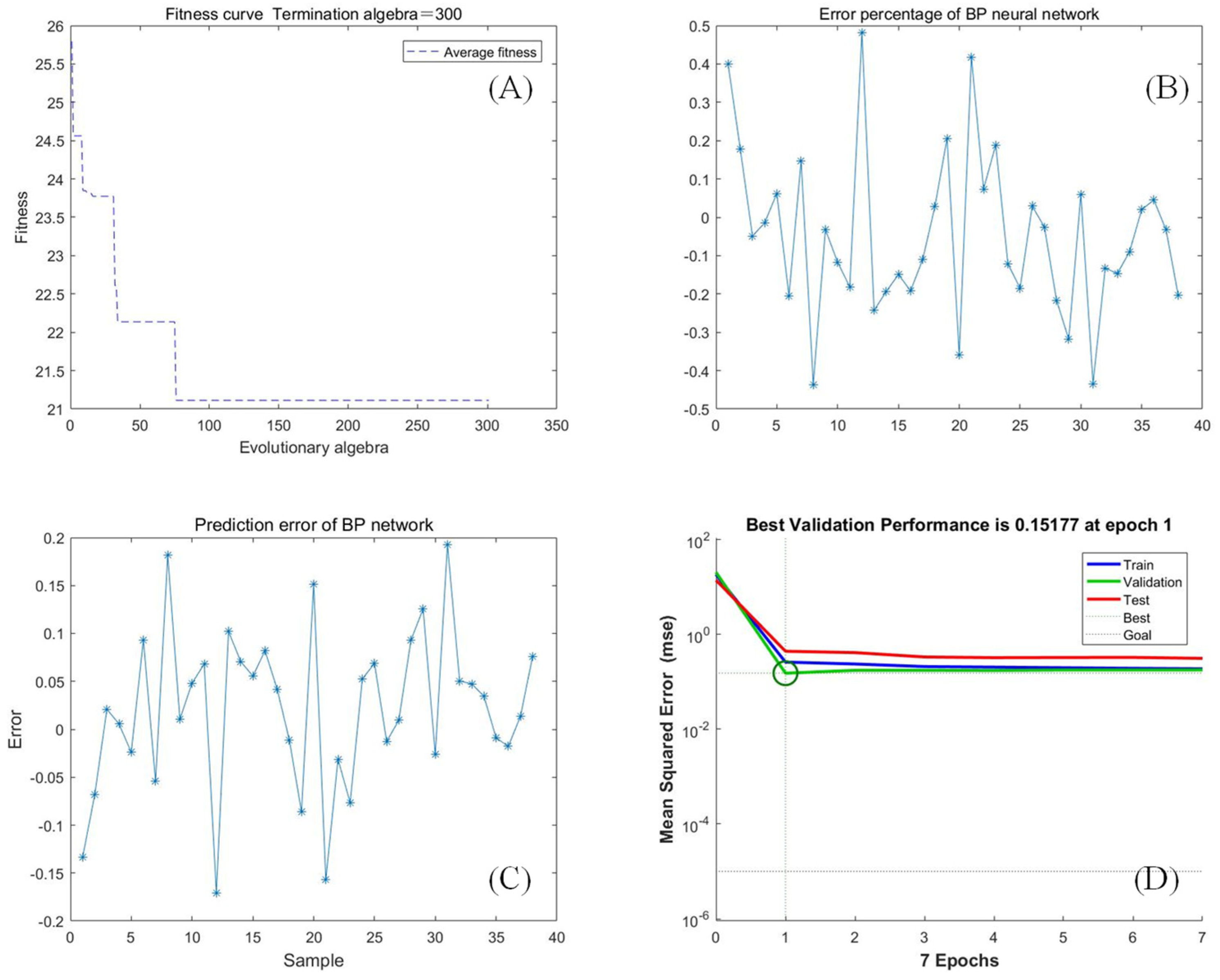
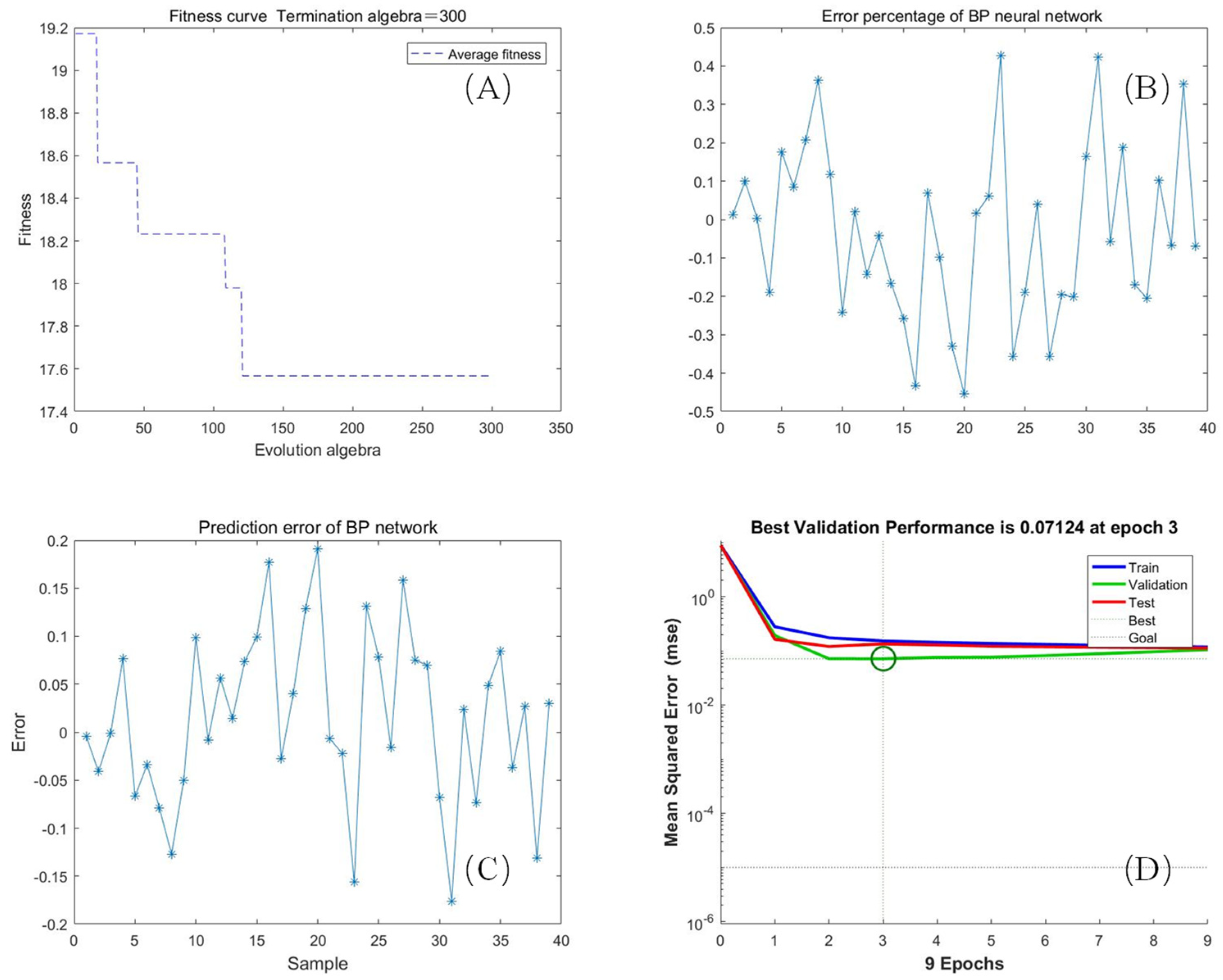
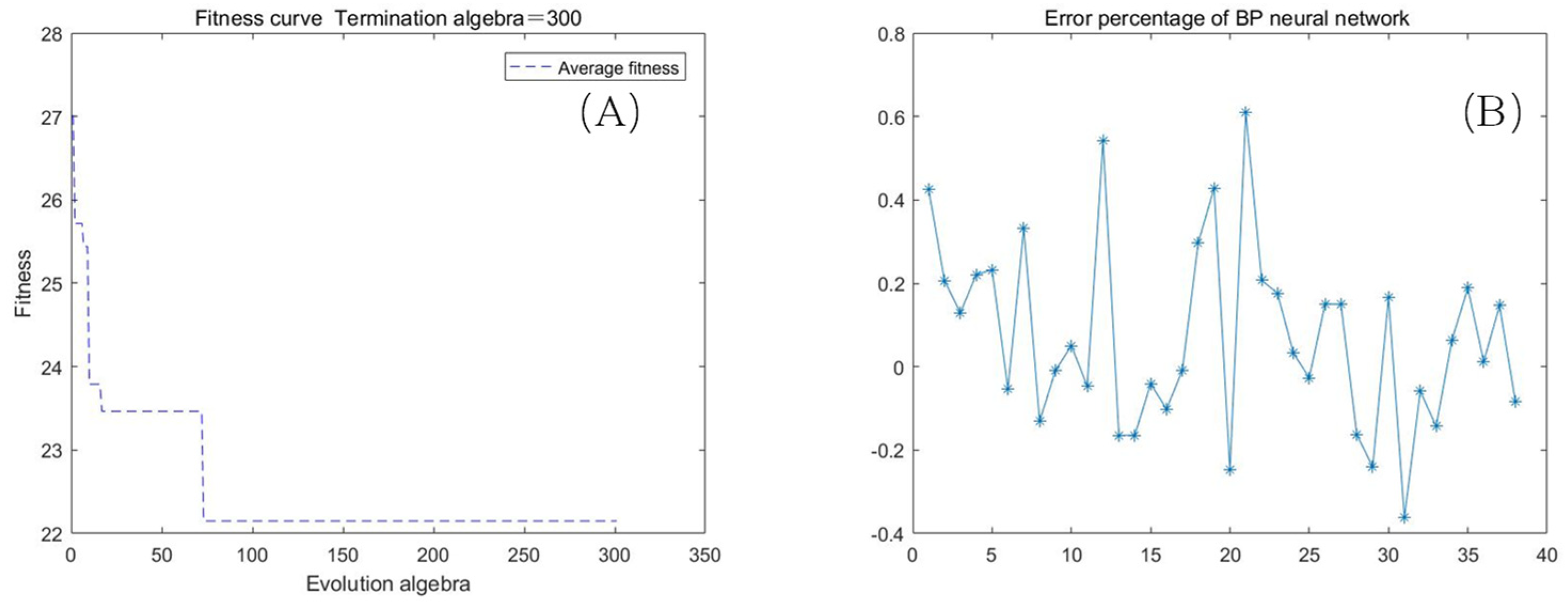
- The set-up BP neural network topology: the BP neural network was optimized using a genetic algorithm to get the optimal individual to assign the initial weight and threshold of the network. The prediction function was output after the network was trained. The GA model was used to optimize the BP neural network and improve inversion accuracy. In the GA module, iterations, population, crossover probability, mutation probability, and BP network evolution are important input parameters.The nonlinear function to be fitted in this paper has two input parameters and one output parameter, so the BP neural network structure set was 2-5-1, that is, the input layer had two nodes, the hidden layer had five nodes, and the output layer had one node, with a total of 15 weights and six thresholds. Hence, the individual code length of the genetic algorithm was 21. The two polarized backscattering coefficients of HH and HV were taken as the input, and the measured SM corresponding to longitude and latitude was the output. The parameters of the genetic algorithm were set as follows: population size = 70; evolution times = 300; crossover probability = 0.6; and mutation probability = 0.2. Figure 3 presents the flow chart of SM inversion based on the GA-BP neural network.
4. Results
4.1. Sensitivity Analysis of the Radar Signal
4.1.1. Water Cloud Model Parameterization
4.1.2. The Sensitivity of ALOS-2 Data to SM under Vegetation Cover
4.2. Modeling Results
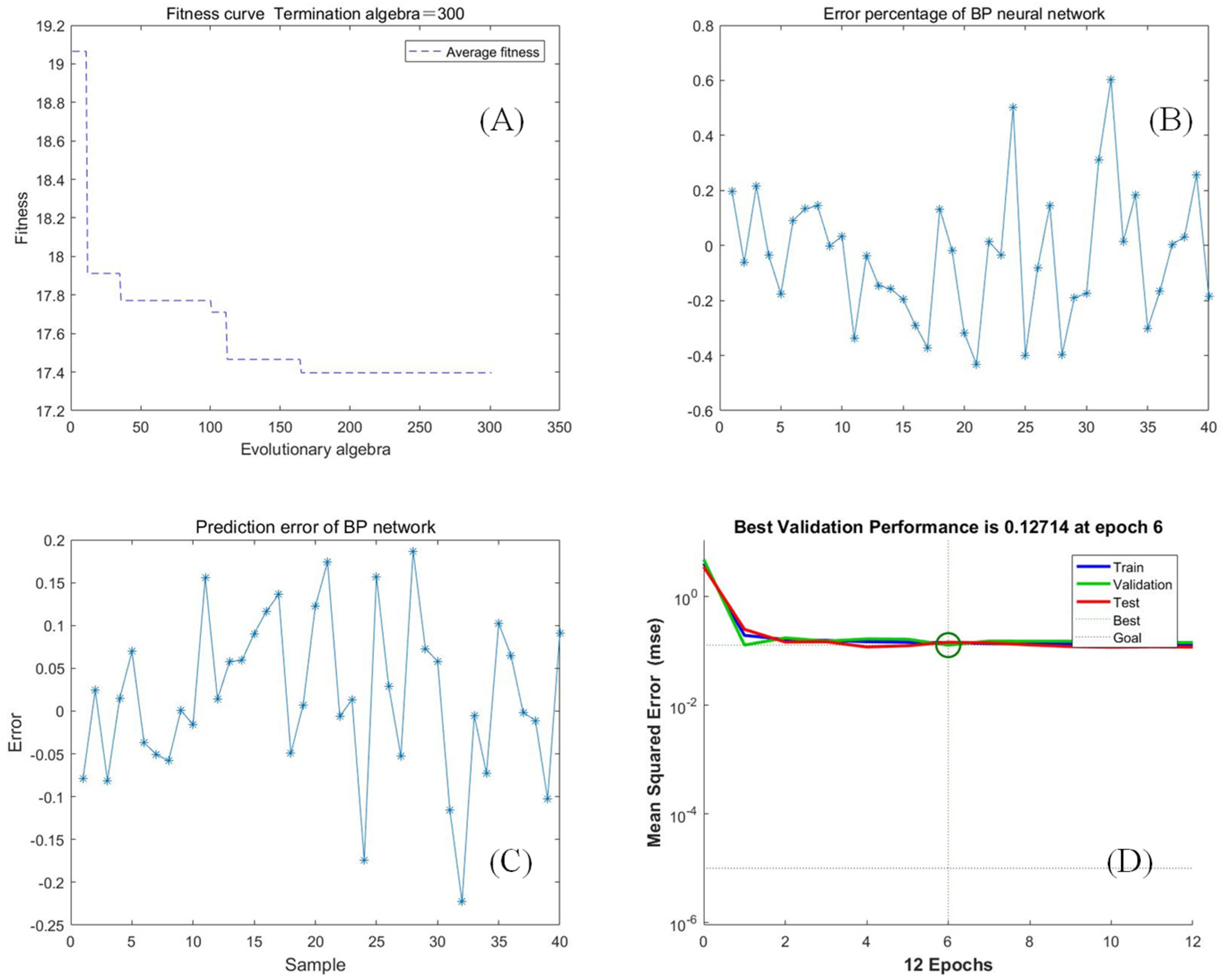
4.2.1. GA-BP Results Analysis
4.2.2. Soil Moisture Retrieval
5. Discussion
- The addition of different radar backscatter models to find out which model can improve the estimation accuracy of SM.
- In the WCM model, more vegetation descriptions can be added.
- More intelligent optimization algorithms and machine-learning algorithms can be applied to radar SM inversion.
- More soil parameters can be added to increase the accuracy of SM inversion.
- In the follow-up research, the different ranges of soil moisture will be studied and discussed separately.
6. Conclusions
- (1)
- The results revealed that ALOS-2 L-band data was sensitive to SM in vegetation-covered surfaces.
- (2)
- The backscattering of ALOS-2 with the copolarization was more sensitive to SM than the crosspolarization. In addition, at a depth of 0–10 cm, the sensitivity was higher than at a depth of 20–30 cm. It can be shown that radar penetration decreases with increasing depth.
- (3)
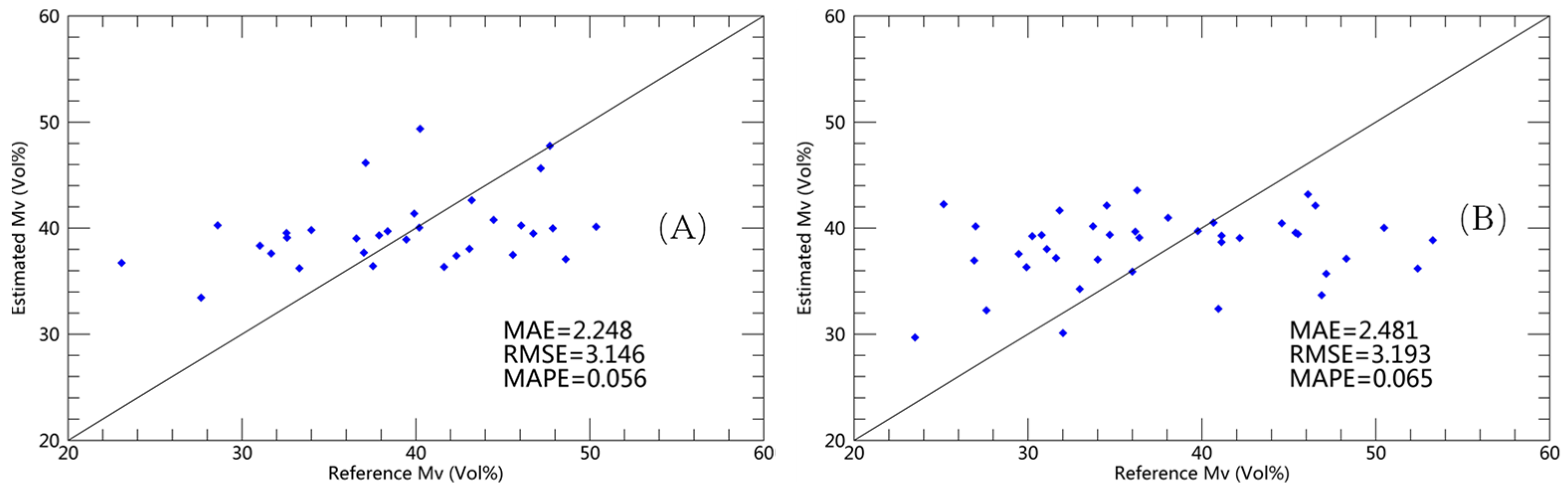
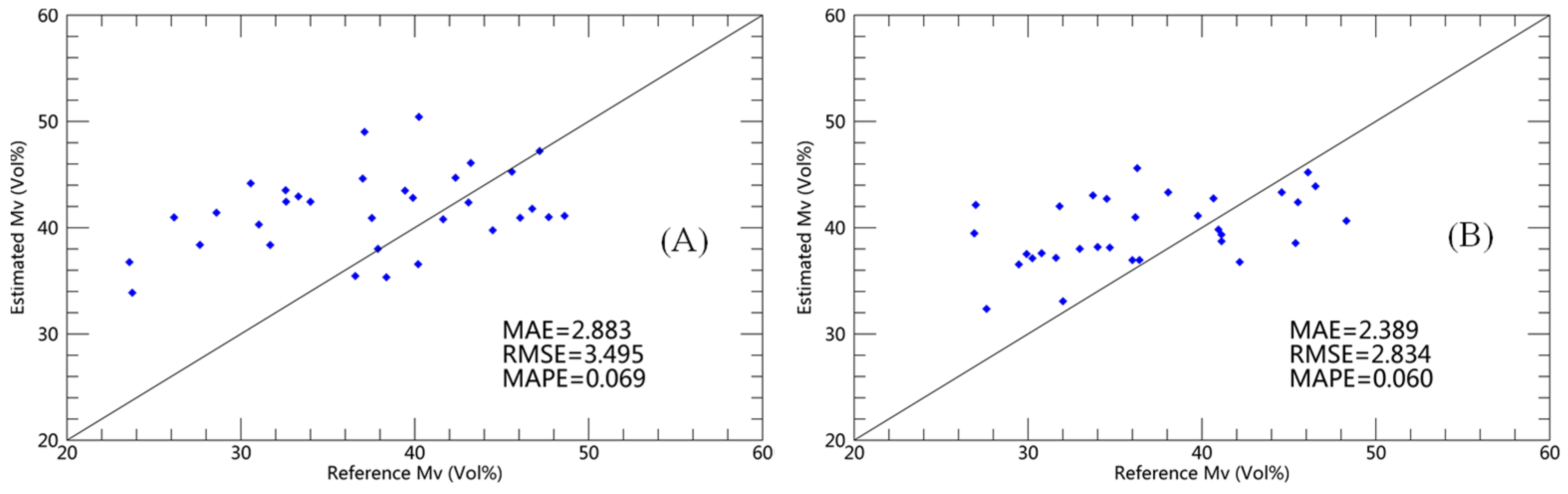
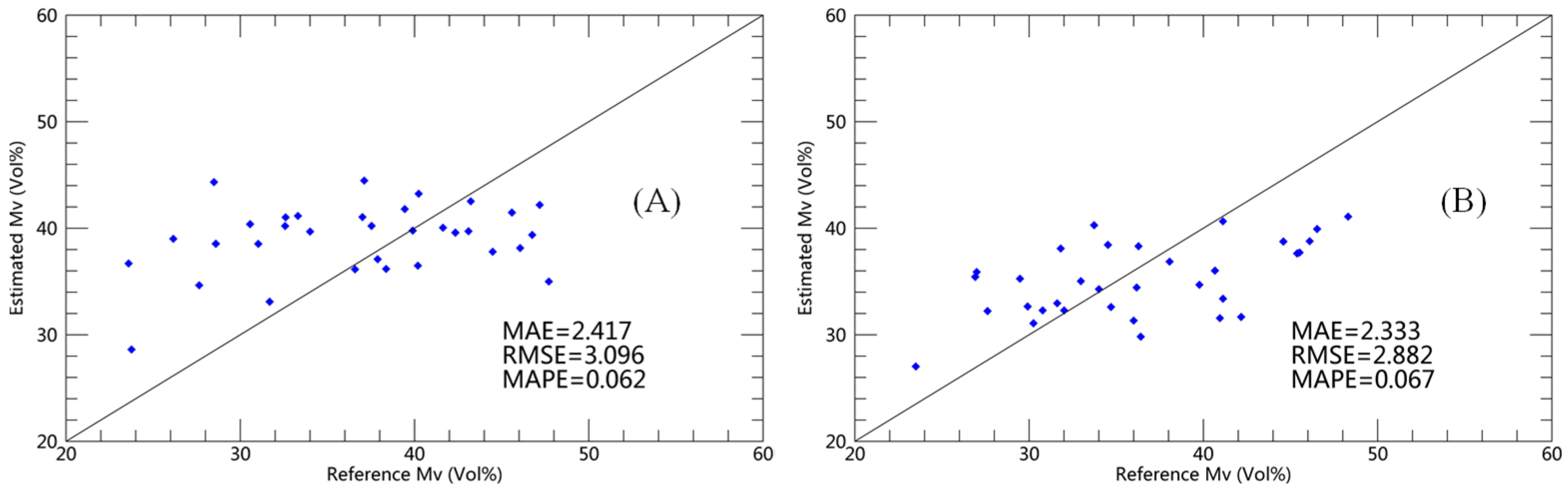
- The NDVI was more sensitive than the NDWI and the NMDI as a vegetation description in the WCM model for estimating SM based on the ALOS-2 radar backscatter.
- (4)
- The WCM can effectively eliminate the vegetation’s backscattering effect, and the WCM shows satisfactory results in SM estimation using ALOS-2 data.
- (5)
- Combining the two polarization modes of ALOS-2 using the novel GA-BP neural network method improved the estimation of SM in the absence of soil roughness and soil type. This might be the key component in future attempts to overcome SM retrieval by microwave remote sensing.
Author Contributions
Funding
Conflicts of Interest
References
- Liu, Y.; Qian, J.; Yue, H. Combined Sentinel-1A With Sentinel-2A to Estimate Soil Moisture in Farmland. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1292–1310. [Google Scholar] [CrossRef]
- Du, W.; Chen, N.; Yan, S. Online soil moisture retrieval and sharing using geospatial web-enabled BDS-R service. Comput. Electron. Agric. 2016, 121, 354–367. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, T.; Qiu, J.; Zhao, X.; Li, R.; Wang, S. Microwave-based vegetation descriptors in the parameterization of water cloud model at L-band for soil moisture retrieval over croplands. GISci. Remote Sens. 2021, 58, 48–67. [Google Scholar] [CrossRef]
- Petropoulos, G.; Srivastava, P.; Piles, M.; Pearson, S. Earth Observation-Based Operational Estimation of Soil Moisture and Evapotranspiration for Agricultural Crops in Support of Sustainable Water Management. Sustainability 2018, 10, 181. [Google Scholar] [CrossRef] [Green Version]
- Torres-Rua, A.; Ticlavilca, A.; Bachour, R.; McKee, M. Estimation of Surface Soil Moisture in Irrigated Lands by Assimilation of Landsat Vegetation Indices, Surface Energy Balance Products, and Relevance Vector Machines. Water 2016, 8, 167. [Google Scholar] [CrossRef] [Green Version]
- Guo, S.; Bai, X.; Chen, Y.; Zhang, S.; Hou, H.; Zhu, Q.; Du, P. An Improved Approach for Soil Moisture Estimation in Gully Fields of the Loess Plateau Using Sentinel-1A Radar Images. Remote Sens. 2019, 11, 349. [Google Scholar] [CrossRef] [Green Version]
- Gururaj, P.; Umesh, P.; Shetty, A. Assessment of surface soil moisture from ALOS PALSAR-2 in small-scale maize fields using polarimetric decomposition technique. Acta Geophys. 2021, 69, 579–588. [Google Scholar] [CrossRef]
- Tian, J.; Philpot, W.D. Relationship between surface soil water content, evaporation rate, and water absorption band depths in SWIR reflectance spectra. Remote Sens. Environ. 2015, 169, 280–289. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) Mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Sadeghi, M.; Babaeian, E.; Tuller, M.; Jones, S.B. The optical trapezoid model: A novel approach to remote sensing of soil moisture applied to Sentinel-2 and Landsat-8 observations. Remote Sens. Environ. 2017, 198, 52–68. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Meng, Q.; Yao, S.; Wang, Q.; Zeng, J.; Zhao, S.; Ma, J. Soil Moisture Retrieval from the Chinese GF-3 Satellite and Optical Data over Agricultural Fields. Sensors 2018, 18, 2675. [Google Scholar] [CrossRef] [Green Version]
- Kaplan, G.; Fine, L.; Lukyanov, V.; Manivasagam, V.S.; Tanny, J.; Rozenstein, O. Normalizing the Local Incidence Angle in Sentinel-1 Imagery to Improve Leaf Area Index, Vegetation Height, and Crop Coefficient Estimations. Land 2021, 10, 680. [Google Scholar] [CrossRef]
- Miernecki, M.; Wigneron, J.; Lopez-Baeza, E.; Kerr, Y.; De Jeu, R.; De Lannoy, G.J.M.; Jackson, T.J.; O’Neill, P.E.; Schwank, M.; Moran, R.F.; et al. Comparison of SMOS and SMAP soil moisture retrieval approaches using tower-based radiometer data over a vineyard field. Remote Sens. Environ. 2014, 154, 89–101. [Google Scholar] [CrossRef] [Green Version]
- Han, L.; Wang, C.; Yu, T.; Gu, X.; Liu, Q. High-Precision Soil Moisture Mapping Based on Multi-Model Coupling and Background Knowledge, Over Vegetated Areas Using Chinese GF-3 and GF-1 Satellite Data. Remote Sens. 2020, 12, 2123. [Google Scholar] [CrossRef]
- Ma, C.; Li, X.; Notarnicola, C.; Wang, S.; Wang, W. Uncertainty Quantification of Soil Moisture Estimations Based on a Bayesian Probabilistic Inversion. IEEE Trans. Geosci. Remote 2017, 55, 3194–3207. [Google Scholar] [CrossRef]
- Mattar, C.; Wigneron, J.; Sobrino, J.A.; Novello, N.; Calvet, J.C.; Albergel, C.; Richaume, P.; Mialon, A.; Guyon, D.; Jimenez-Munoz, J.C.; et al. A Combined Optical—Microwave Method to Retrieve Soil Moisture Over Vegetated Areas. IEEE Trans. Geosci. Remote 2012, 50, 1404–1413. [Google Scholar] [CrossRef]
- Mishra, V.N.; Prasad, R.; Kumar, P.; Gupta, D.K.; Srivastava, P.K. Dual-polarimetric C-band SAR data for land use/land cover classification by incorporating textural information. Environ. Earth Sci. 2017, 76, 1–16. [Google Scholar] [CrossRef]
- Yang, L.; Li, Y.; Li, Q.; Sun, X.; Kong, J.; Wang, L. Implementation of a multiangle soil moisture retrieval model using RADARSAT-2 imagery over arid Juyanze, northwest China. J. Appl. Remote Sens. 2017, 11, 1. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Chen, B.; Fan, H.; Huang, J.; Zhao, H. The Potential Use of Multi-Band SAR Data for Soil Moisture Retrieval over Bare Agricultural Areas: Hebei, China. Remote Sens. 2016, 8, 7. [Google Scholar] [CrossRef] [Green Version]
- Zhu, B.; Song, X.; Leng, P.; Sun, C.; Wang, R.; Jiang, X. A Novel Simplified Algorithm for Bare Surface Soil Moisture Retrieval Using L-Band Radiometer. ISPRS Int. J. Geo-Inf. 2016, 5, 143. [Google Scholar] [CrossRef] [Green Version]
- Aubert, M.; Baghdadi, N.N.; Zribi, M.; Ose, K.; El Hajj, M.; Vaudour, E.; Gonzalez-Sosa, E. Toward an Operational Bare Soil Moisture Mapping Using TerraSAR-X Data Acquired Over Agricultural Areas. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 900–916. [Google Scholar] [CrossRef]
- Rozenstein, O.; Siegal, Z.; Blumberg, D.G.; Adamowski, J. Investigating the backscatter contrast anomaly in synthetic aperture radar (SAR) imagery of the dunes along the Israel—Egypt border. Int. J. Appl. Earth Obs. 2016, 46, 13–21. [Google Scholar] [CrossRef]
- Bao, Y.; Lin, L.; Wu, S.; Kwal Deng, K.A.; Petropoulos, G.P. Surface soil moisture retrievals over partially vegetated areas from the synergy of Sentinel-1 and Landsat 8 data using a modified water-cloud model. Int. J. Appl. Earth Obs. 2018, 72, 76–85. [Google Scholar] [CrossRef]
- De Roo, R.D.; Du, Y.; Ulaby, F.T.; Dobson, M.C. A semi-empirical backscattering model at L-band and C-band for a soybean canopy with soil moisture inversion. IEEE T. Geosci. Remote 2001, 39, 864–872. [Google Scholar] [CrossRef]
- Qiu, J.; Crow, W.T.; Wagner, W.; Zhao, T. Effect of vegetation index choice on soil moisture retrievals via the synergistic use of synthetic aperture radar and optical remote sensing. Int. J. Appl. Earth Obs. 2019, 80, 47–57. [Google Scholar] [CrossRef]
- Kaplan, G.; Fine, L.; Lukyanov, V.; Manivasagam, V.S.; Malachy, N.; Tanny, J.; Rozenstein, O. Estimating Processing Tomato Water Consumption, Leaf Area Index, and Height Using Sentinel-2 and VENµS Imagery. Remote Sens. 2021, 13, 1046. [Google Scholar] [CrossRef]
- Kumar, P.; Prasad, R.; Choudhary, A.; Gupta, D.K.; Mishra, V.N.; Vishwakarma, A.K.; Singh, A.K.; Srivastava, P.K. Comprehensive evaluation of soil moisture retrieval models under different crop cover types using C-band synthetic aperture radar data. Geocarto Int. 2019, 34, 1022–1041. [Google Scholar] [CrossRef]
- Huang, S.; Ding, J.; Liu, B.; Ge, X.; Wang, J.; Zou, J.; Zhang, J. The Capability of Integrating Optical and Microwave Data for Detecting Soil Moisture in an Oasis Region. Remote Sens. 2020, 12, 1358. [Google Scholar] [CrossRef]
- Hosseini, M.; McNairn, H. Using multi-polarization C- and L-band synthetic aperture radar to estimate biomass and soil moisture of wheat fields. Int. J. Appl. Earth Obs. 2017, 58, 50–64. [Google Scholar] [CrossRef]
- Jain, A.; Singh, D. An Information fusion approach for PALSAR data to retrieve soil moisture. Geocarto Int. 2017, 32, 1017–1033. [Google Scholar] [CrossRef]
- Kong, J.; Yang, J.; Zhen, P.; Li, J.; Yang, L. A Coupling Model for Soil Moisture Retrieval in Sparse Vegetation Covered Areas Based on Microwave and Optical Remote Sensing Data. IEEE Trans. Geosci. Remote 2018, 56, 7162–7173. [Google Scholar] [CrossRef]
- Mandal, D.; Hosseini, M.; McNairn, H.; Kumar, V.; Bhattacharya, A.; Rao, Y.S.; Mitchell, S.; Robertson, L.D.; Davidson, A.; Dabrowska-Zielinska, K. An investigation of inversion methodologies to retrieve the leaf area index of corn from C-band SAR data. Int. J. Appl. Earth Obs. 2019, 82, 101893. [Google Scholar] [CrossRef]
- Meng, Q.; Zhang, L.; Xie, Q.; Yao, S.; Chen, X.; Zhang, Y. Combined Use of GF-3 and Landsat-8 Satellite Data for Soil Moisture Retrieval over Agricultural Areas Using Artificial Neural Network. Adv. Meteorol. 2018, 2018, 9315132. [Google Scholar] [CrossRef]
- Prakash, R.; Singh, D.; Pathak, N.P. A Fusion Approach to Retrieve Soil Moisture With SAR and Optical Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 196–206. [Google Scholar] [CrossRef]
- Sekertekin, A.; Marangoz, A.M.; Abdikan, S. ALOS-2 and Sentinel-1 SAR data sensitivity analysis to surface soil moisture over bare and vegetated agricultural fields. Comput. Electron. Agric. 2020, 171, 105303. [Google Scholar] [CrossRef]
- Tao, L.; Li, J.; Jiang, J.; Chen, X. Leaf Area Index Inversion of Winter Wheat Using Modified Water-Cloud Model. IEEE Geosci. Remote Sens. 2016, 13, 816–820. [Google Scholar] [CrossRef]
- Wang, L.; He, B.; Bai, X.; Xing, M. Assessment of Different Vegetation Parameters for Parameterizing the Coupled Water Cloud Model and Advanced Integral Equation Model for Soil Moisture Retrieval Using Time Series Sentinel-1A Data. Photogramm. Eng. Remote Sens. 2019, 85, 43–54. [Google Scholar] [CrossRef]
- Mandal, D.; Kumar, V.; Lopez-Sanchez, J.M.; Bhattacharya, A.; McNairn, H.; Rao, Y.S. Crop biophysical parameter retrieval from Sentinel-1 SAR data with a multi-target inversion of Water Cloud Model. Int. J. Remote Sens. 2020, 41, 5503–5524. [Google Scholar] [CrossRef]
- Rozenstein, O.; Qin, Z.; Derimian, Y.; Karnieli, A. Correction: Rozenstein, O.; et al. Derivation of Land Surface Temperature for Landsat-8 TIRS Using a Split Window Algorithm. Sensors 2014, 14, 5768–5780. Sensors 2014, 14, 11277. [Google Scholar] [CrossRef] [Green Version]
- Serrano, L.; Ustin, S.L.; Roberts, D.A.; Gamon, J.A.; Peñuelas, J. Deriving Water Content of Chaparral Vegetation from AVIRIS Data. Remote Sens. Environ. 2000, 74, 570–581. [Google Scholar] [CrossRef]
- Chen, D.; Huang, J.; Jackson, T.J. Vegetation water content estimation for corn and soybeans using spectral indices derived from MODIS near- and short-wave infrared bands. Remote Sens. Environ. 2005, 98, 225–236. [Google Scholar] [CrossRef]
- Wang, L.; Qu, J.J. NMDI: A normalized multi-band drought index for monitoring soil and vegetation moisture with satellite remote sensing. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef]
- Wang, L.; Qu, J.J.; Hao, X. Forest fire detection using the normalized multi-band drought index (NMDI) with satellite measurements. Agric. For. Meteorol. 2008, 148, 1767–1776. [Google Scholar] [CrossRef]
- Attema, E.P.W.; Ulaby, F.T. Vegetation modeled as a water cloud. Radio Sci. 1978, 13, 357–364. [Google Scholar] [CrossRef]
- Carter, J.N. Chapter 3 Introduction to using genetic algorithms. In Developments in Petroleum Science; Nikravesh, M., Aminzadeh, F., Zadeh, L.A., Eds.; Elsevier: Amsterdam, The Netherlands, 2003; Volume 51, pp. 51–76. [Google Scholar]
- Juang, C.F. A Hybrid of Genetic Algorithm and Particle Swarm Optimization for Recurrent Network Design. IEEE Trans. Syst. Man Cybern. Part B 2004, 34, 997–1006. [Google Scholar] [CrossRef] [PubMed]
- Morris, G.M.; Goodsell, D.S.; Halliday, R.S.; Huey, R.; Hart, W.E.; Belew, R.K.; Olson, A.J. Automated docking using a Lamarckian genetic algorithm and an empirical binding free energy function. J. Comput. Chem. 1998, 19, 1639–1662. [Google Scholar] [CrossRef] [Green Version]
- Rumelhart, D.E. Learning internal representations by error back propagation. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Syarif, J.; Detak, Y.P.; Ramli, R. Modeling of Correlation between Heat Treatment and Mechanical Properties of Ti-6Al-4V Alloy Using Feed Forward Back Propagation Neural Network. ISIJ Int. 2010, 50, 1689–1694. [Google Scholar] [CrossRef] [Green Version]
- El Hajj, M.; Baghdadi, N.; Zribi, M. Comparative analysis of the accuracy of surface soil moisture estimation from the C- and L-bands. Int. J. Appl. Earth Obs. 2019, 82, 101888. [Google Scholar] [CrossRef]
- Zribi, M.; Muddu, S.; Bousbih, S.; Al Bitar, A.; Tomer, S.K.; Baghdadi, N.; Bandyopadhyay, S. Analysis of L-Band SAR Data for Soil Moisture Estimations over Agricultural Areas in the Tropics. Remote Sens. 2019, 11, 1122. [Google Scholar] [CrossRef] [Green Version]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Bazzi, H. Synergic Use of Sentinel-1 and Sentinel-2 Images for Operational Soil Moisture Mapping at High Spatial Resolution over Agricultural Areas. Remote Sens. 2017, 9, 1292. [Google Scholar] [CrossRef] [Green Version]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Belaud, G.; Cheviron, B.; Courault, D.; Charron, F. Soil moisture retrieval over irrigated grassland using X-band SAR data. Remote Sens. Environ. 2016, 176, 202–218. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Min Value | Max Value | Mean | Unit |
|---|---|---|---|---|
| NDVI | 0 | 0.76 | 0.08 | - |
| NDWI | 0.3 | 0.94 | 0.72 | - |
| NMDI | 0.58 | 0.97 | 0.85 | - |
| Incidence Angle | - | - | 39.663 | ° |
| (dB) | 0–10 cm (vol%) | 20–30 cm (vol%) | |||||
|---|---|---|---|---|---|---|---|
| MAE | RMSE | MAPE | MAE | RMSE | MAPE | ||
| WCM (V1 = V2 = NDVI) | HH | 2.792 | 3.606 | −0.25 | 2.843 | 3.67 | −0.26 |
| HV | 3.083 | 3.755 | −0.16 | 3.085 | 3.743 | −0.16 | |
| WCM (V1 = V2 = NDWI) | HH | 3.006 | 3.882 | −0.25 | 3.06 | 3.951 | −0.26 |
| HV | 3.319 | 4.043 | −0.16 | 3.321 | 4.03 | −0.16 | |
| WCM (V1 = V2 = NMDI) | HH | 3.142 | 4.058 | −0.25 | 3.199 | 4.13 | −0.26 |
| HV | 3.469 | 4.226 | −0.16 | 3.472 | 4.212 | −0.16 | |
| GA Preferences | Value |
| Iterations | 300 |
| Population | 70 |
| Crossover probability | 0.6 |
| Mutation probability | 0.2 |
| BP Preferences | Value |
| Maximum number of training | 100 |
| The training accuracy | 0.00001 |
| Learning rate | 0.1 |
| 0–10 cm (vol%) | 20–30 cm (vol%) | |||||
|---|---|---|---|---|---|---|
| MAE | RMSE | MAPE | MAE | RMSE | MAPE | |
| V1 = V2 = NDVI | 2.248 | 3.146 | 0.056 | 2.481 | 3.195 | 0.065 |
| V1 = V2 = NDWI | 2.883 | 3.495 | 0.069 | 2.389 | 2.834 | 0.06 |
| V1 = V2 = NMDI | 2.417 | 3.096 | 0.062 | 2.333 | 2.883 | 0.067 |
| Author | Data | Method |
|---|---|---|
| Skkertekin et al. | ALOS-2 Sentinel-1 | WCM Dubois MLR |
| El Hajj et al. | TerraSAR-X COSMO-SkyMed SPOT4/5 Landdat 7/8 | WCM Multi-layer perceptron neural networks (NNs) |
| Zribi et al. | ALOS-2 | WCM Dubois Baghdadi et al. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Gao, M.; Wang, L.; Rozenstein, O. Soil Moisture Retrieval over a Vegetation-Covered Area Using ALOS-2 L-Band Synthetic Aperture Radar Data. Remote Sens. 2021, 13, 3894. https://doi.org/10.3390/rs13193894
Gao Y, Gao M, Wang L, Rozenstein O. Soil Moisture Retrieval over a Vegetation-Covered Area Using ALOS-2 L-Band Synthetic Aperture Radar Data. Remote Sensing. 2021; 13(19):3894. https://doi.org/10.3390/rs13193894
Chicago/Turabian StyleGao, Ya, Maofang Gao, Liguo Wang, and Offer Rozenstein. 2021. "Soil Moisture Retrieval over a Vegetation-Covered Area Using ALOS-2 L-Band Synthetic Aperture Radar Data" Remote Sensing 13, no. 19: 3894. https://doi.org/10.3390/rs13193894
APA StyleGao, Y., Gao, M., Wang, L., & Rozenstein, O. (2021). Soil Moisture Retrieval over a Vegetation-Covered Area Using ALOS-2 L-Band Synthetic Aperture Radar Data. Remote Sensing, 13(19), 3894. https://doi.org/10.3390/rs13193894