1. Introduction
Crop diseases are widely considered as one of the most pressing challenges for food crops, seriously threatening crop quality and safety because a safe food supply begins with protecting crops from diseases and toxins. It is acknowledged that the crop diseases account for 20–40% yield loss globally each year, resulting in significant economic losses [
1]. The conventional crop disease control method is mainly calendar-based pesticide application regardless of the current disease development and risks. However, this method not only leads to a high cost but also generates adverse environmental impact. Therefore, it is paramount to use a decision-based disease control method to improve the detection accuracy for crop disease control and management.
Wheat is one main crop in the world (particularly in north China), providing 20% of protein and food calories for 4.5 billion people [
2]. However, wheat production is facing serious problems, such as abiotic stresses, pathogens and pests, inducing a severe yield loss. In particular, yellow rust disease is one of the main challenges, which is caused by
Puccinia striiformis f. sp.
tritici (Pst) [
3,
4]. This kind of disease spreads very quickly under a temperature of 5–24 °C and significantly affects wheat production. It is reported that near 5.5 million tons per year wheat yield loss is mainly caused by yellow rust disease [
5]. To this end, a reliable and robust method for yellow rust detection is highly desirable for disease management, which is beneficial for sustainable crop production and food safety.
It is necessary that the detection method is rapid, specific to a particular disease and sensitive enough for early disease symptom. Visual perception is capable of interpreting the environment through image analysis of light reflected by objects and now finds a great number of applications including crop disease detection [
6,
7]. Various platforms are available to collect sensing data, such as satellite/manned-aircraft based and Unmanned Aerial Vehicles (UAV) based ones [
8,
9]. However, crop disease detection by satellite data is sometimes restricted by its poor spatial and temporal resolutions in farm-scale applications. On the contrary, UAV sensing technology is now receiving an ever-increasing research interest for farm-scale data acquisition because of its attractive features, such as a relatively affordable cost, a high spatial and user-defined temporal resolution, and a good flexibility [
10,
11,
12], presenting a high-efficiency approach on crop remote sensing data collection. There are a lot of studies on using UAV platform with different sensors for rust disease sensing, for example, Liu used RGB camera at an altitude of 100 m to monitor stripe rust disease and concluded that Red band is the most informative one among three visible bands [
13]. UAV with five-band multispectral camera is adopted in yellow rust detection, showing that RedEdge and near infrared (NIR) band can bring extra information on yellow rust detection and achieve a relatively high accuracy [
2].
In addition to sensing platforms and sensors, the selection of algorithms also significantly affects yellow rust detection performance. Different from image level classification method, semantic segmentation aims to discriminate each class at a pixel level, increasing the classification performance. Recently, the challenging crop disease detection problem is formulated as a semantic segmentation task, and Convolutional Neural Network (CNN) method is adopted because of its fine properties in automatically extracting spectral-spatial features [
14,
15]. Many prior studies innovate the CNN architecture in the disease detection. For example, Jin proposed a two-dimensional CNN model to classify the healthy and diseased wheat in a rapid and non-destructive manner [
16]. Zhang proposed a novel Deep CNN based approach for an automatic crop disease detection by using UAV hyperspectral images with a very high spatial resolution [
17]. A 3D-CNN is also developed in [
18] for soybean charcoal rot disease identification by using hyperspectral images with 240 different wavelengths and achieves a classification accuracy of 95.73%.
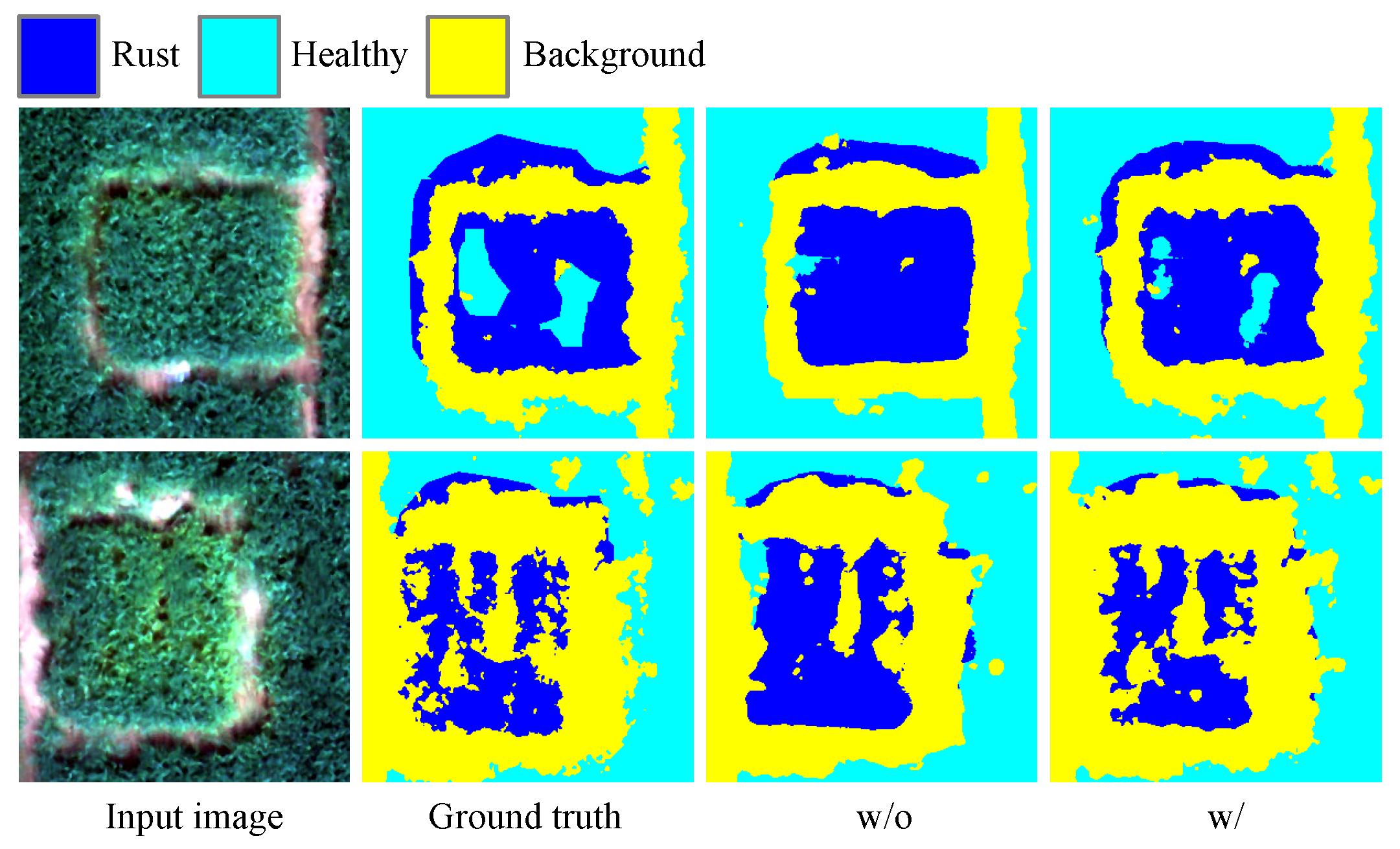
However, there are still some particular problems not being considered but generally occurring in yellow rust disease detection, where the final segmentation performance can be improved once being addressed. In practical scenarios, the shape of the yellow rust disease infected area is irregular where the middle infected area is more serious and the situation near boundary gradually decreases, bringing irregular boundary problem. In addition, due to the sensor restrictions, some noise sometimes is brought to collected images, resulting in blurred boundary problems of yellow rust area. There are some designs to improve the segmentation performance dealing with the boundary problem. For example, Yang proposed edge-aware network for the extraction of buildings and demonstrated the effectiveness on Wuhan University (WHU) building benchmark [
19]. Xu combined a high-resolution network with the boundary-aware loss to gradually rebuild the boundary details, achieving the state-of-the-art performance on the Potsdam and Vaihingen datasets [
20]. Dai and Zhu made improvements on the convolution by introducing learnable offsets in deformable convolutional network, enabling the network to deal with irregular objects and further indirectly improving the segmentation performance [
21,
22]. Wang innovated a new upsampling method called content-aware reassembly of features module to upsample the feature maps using learnable parameters, which introduced global guidance of contextual information and further sharpened the boundaries [
23].
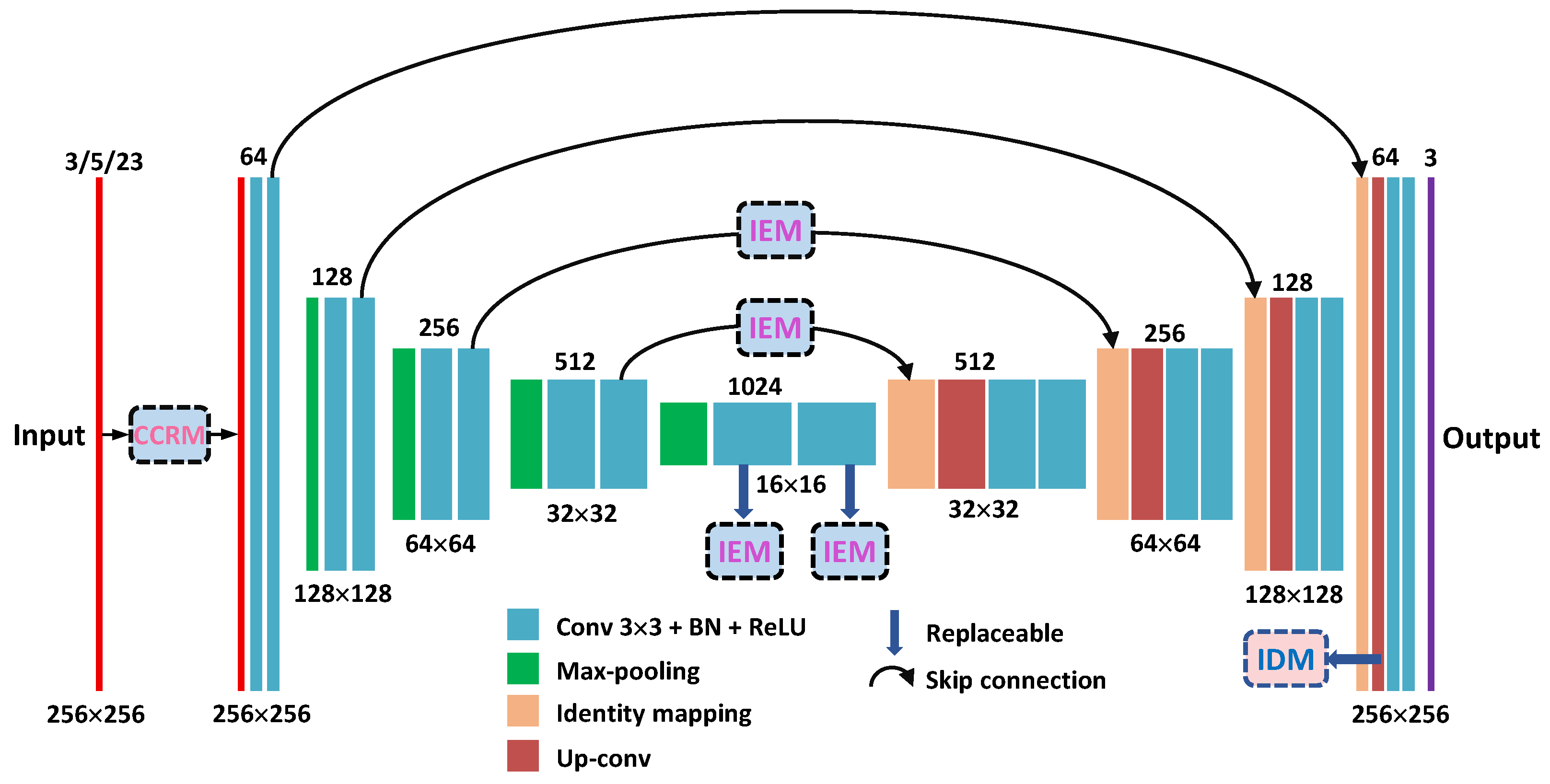
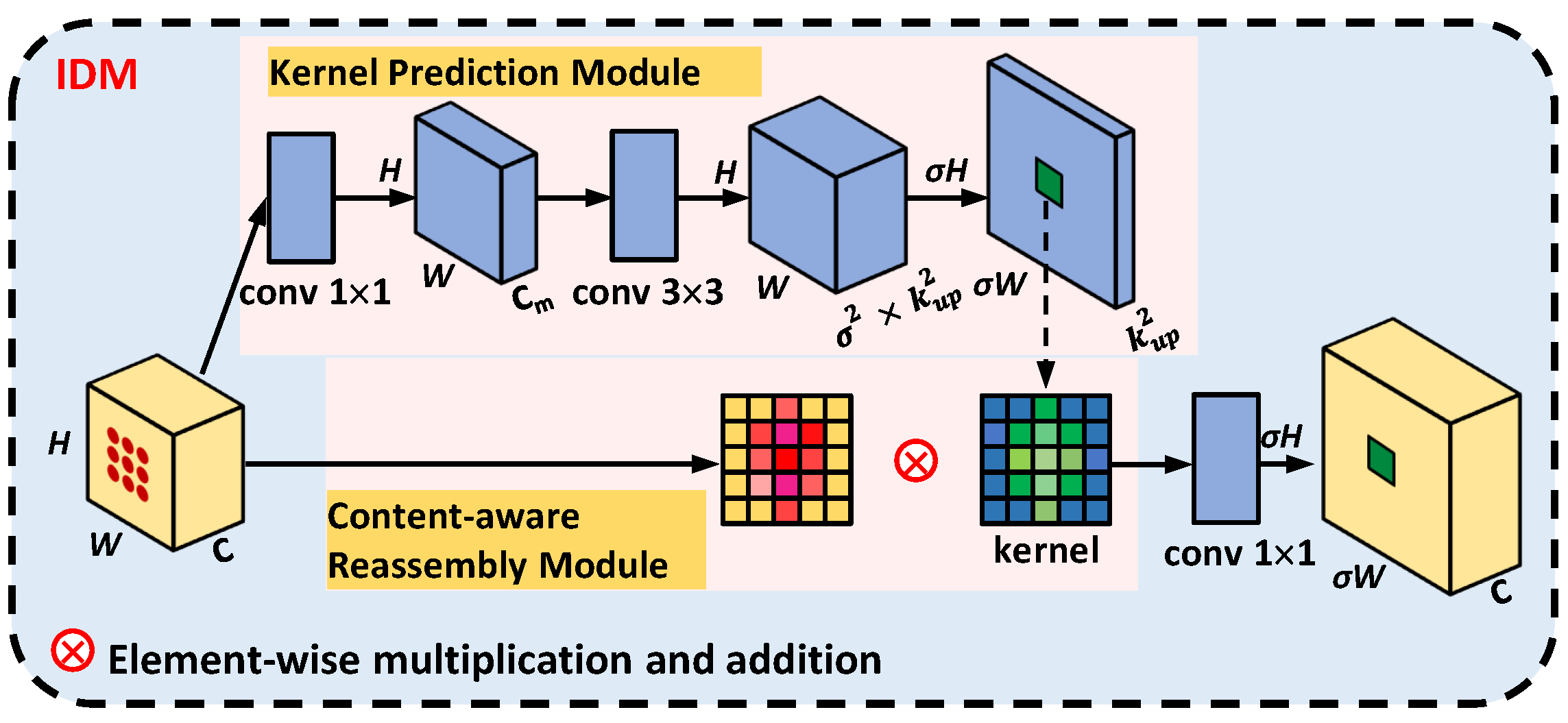
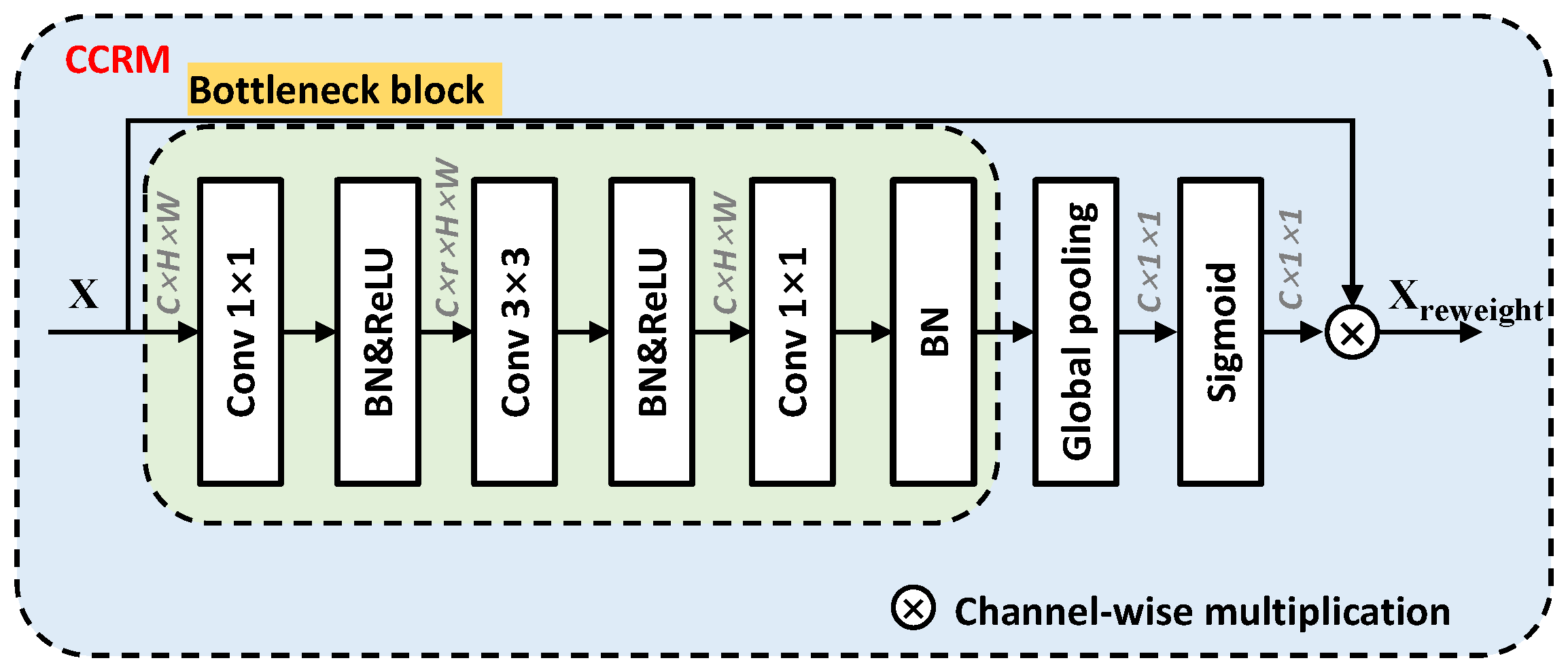
Although the aforementioned literature demonstrated useful designs to extract sharp boundary in urban landscape segmentation problems, very little work has been considered in crop disease detection applications. As a consequence, an Irregular Segmentation U-Shape Network (Ir-UNet) is proposed to deal with irregular and blurred boundary problems for yellow rust disease detection, which can further improve rust segmentation performance. In this work, the irregular encoder module (IEM) is applied and fused in UNet to handle irregular boundary because it can adaptively adjust the weight of the convolution kernel for different directions according to the shape of segmented objects, meaning that such a convolution kernel can adapt well for irregular objects. Secondly, the irregular decoder module (IDM) is utilized in UNet as this method can adopt different sampling strategies for different regions according to the semantic information of the feature map, so that it can pay more attention to the global information and solve blurred boundary problem. Finally, the content-aware channel re-weight module (CCRM) is introduced in the basic UNet to optimize the feature weight, maximizing the final segmentation performance based on Ir-UNet. Therefore, this work aims to develop an automatic yellow rust detection method by integrating UAV multispectral imagery and Ir-UNet algorithms. The proposed algorithm is validated by real-life field experiments with promising results, where aerial images are collected on a field infected with wheat yellow rust disease. To be more clear, the main contributions are summarized as follows:
- (1)
An automatic yellow rust disease detection framework is proposed to integrate UAV multispectral imagery and Ir-UNet deep learning architecture;
- (2)
The Ir-UNet architecture is proposed by integrating IEM and IDM to cope with irregular and blurred boundary problems in yellow rust disease detection;
- (3)
The CCRM is proposed to re-allocate the weight of each feature to maximize the Ir-UNet segmentation performance;
- (4)
Field experiments are to validate the proposed algorithm against different existing algorithms and results.
The remainder of this paper is organized as follows:
Section 2 introduces related experiment design including field experiment and UAV system design;
Section 3 details the Ir-UNet network design;
Section 4 demonstrates the comparative results of different algorithms and inputs;
Section 5 presents a discussion; finally, conclusion and future work are presented in
Section 6.
5. Discussion
The proposed Ir-UNet achieves state-of-the-art performance in yellow rust segmentation task in terms of
precision,
recall,
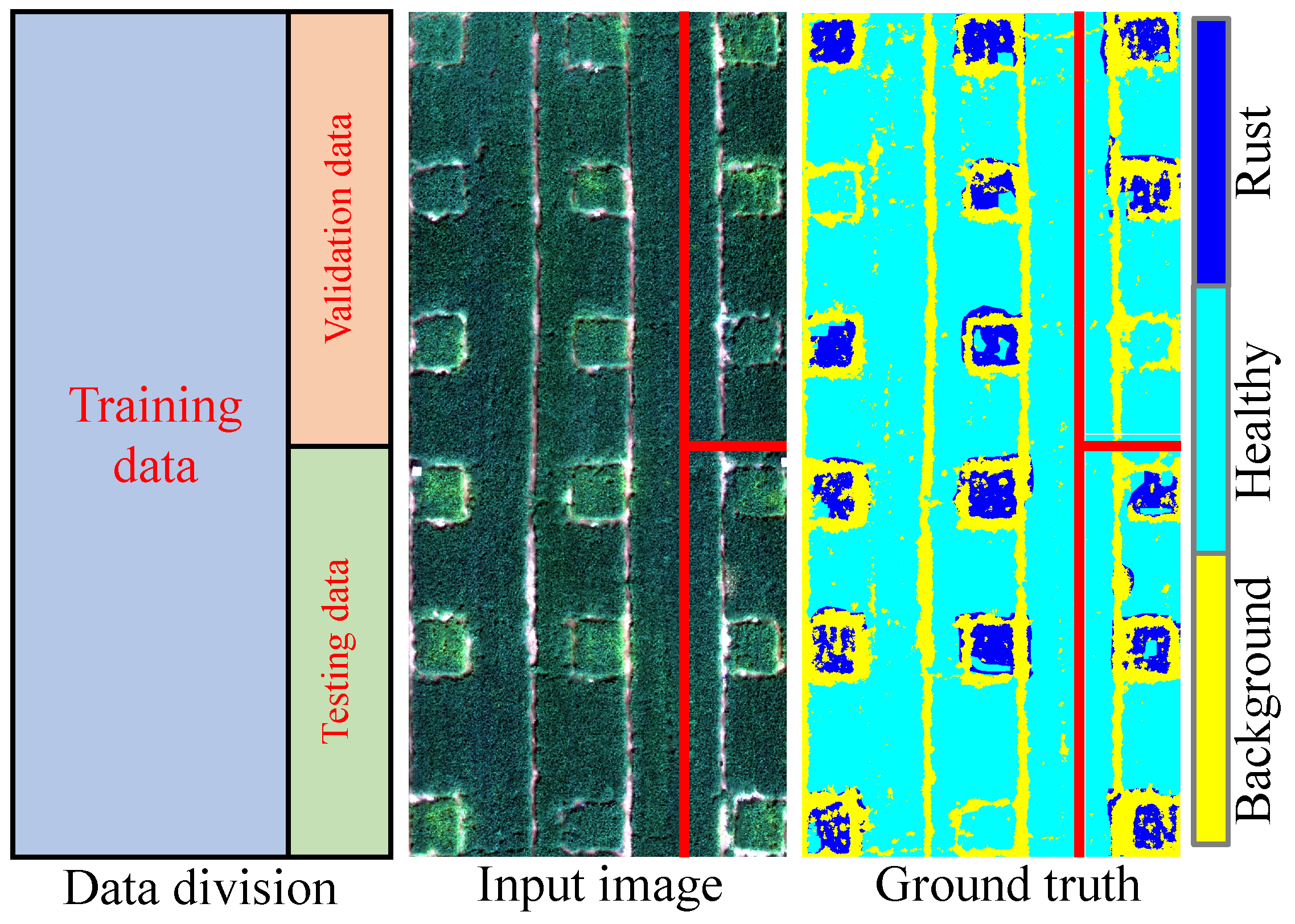
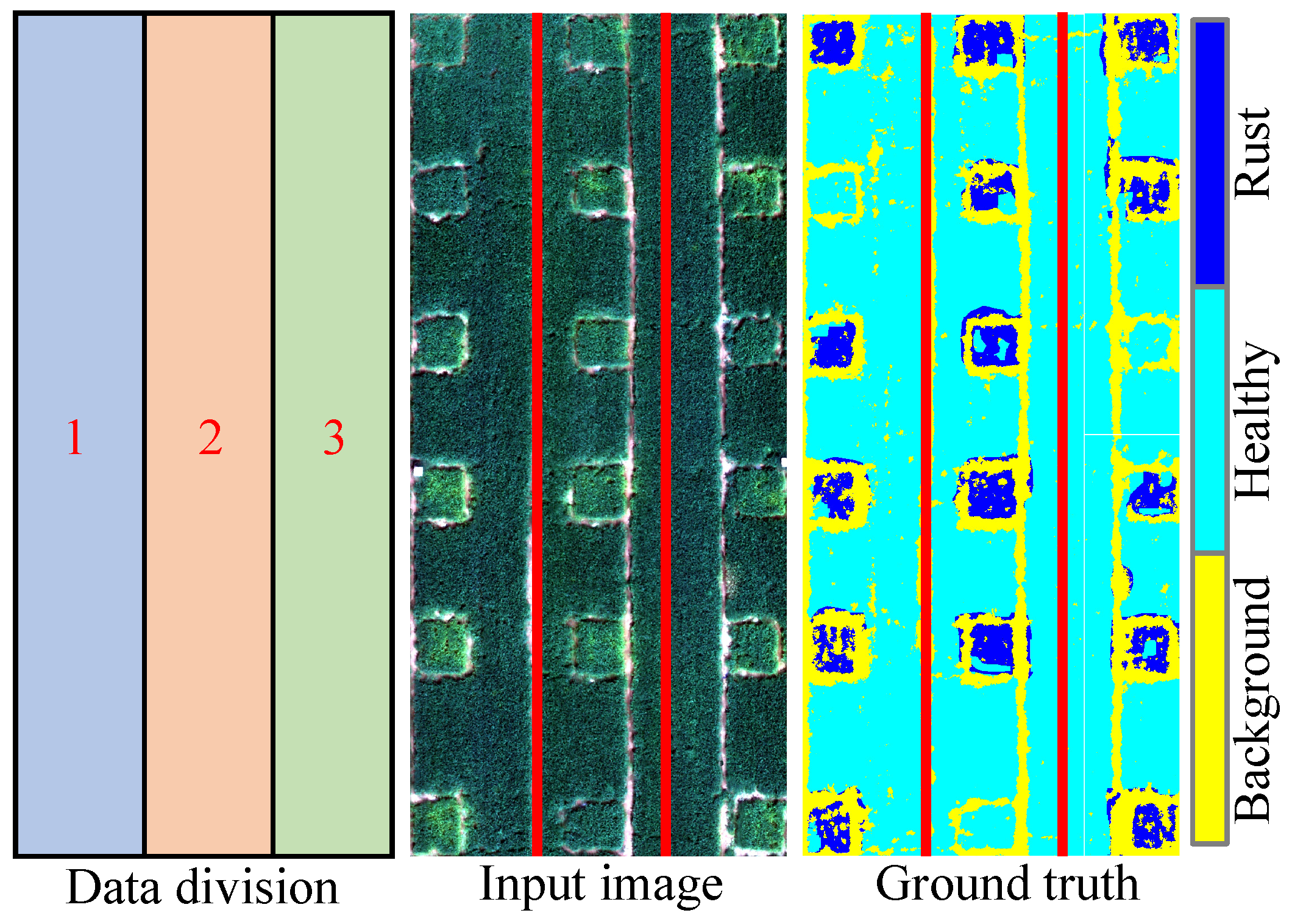
F1 score and overall accuracy. However, there are still two main problems. First, the dataset from one flight for deep learning network seems limited; it is necessary to consider the k-fold validation method to evaluate the algorithm robustness. As is shown in
Figure 15, this field is divided into three parts for k-fold validation (as there are three replicates of the experiment), where area 2 and 3 are first for training and 1 for testing, 1, 3 for training and 2 for testing, 1, 2 for training and 3 for testing. A comparative study using a different training and testing dataset by various inputs is displayed in
Table 11.
Precision,
Recall and
F1 score are the mean value of each class, including healthy, background and rust. It can be seen the mean values of
OA using input A, B, C are 97.66%, 95.35% and 97.03% respectively, where input A is the best and input B is the worst, providing a more reliable and robust result by our proposed method. As a result, the proposed method is robust and accurate under k-fold validation settings.
Second, excessive spectral information of remote sensing images is not always helpful because some noise may be brought, leading to the increase of computation load and less robustness. Therefore, some particular features (e.g., band and index) can be selected to achieve the same performance with less computation load. In order to evaluate the performance of different feature selection methods, here a band-based feature selection method and index-based feature selection method are enumerated to compare with each other. First, five raw bands (treated as network inputs) are tested in the proposed method respectively, where the results are presented and compared by using
OA. It follows from
Table 12 that RedEdge band obtains the highest
OA score among five raw bands reaching up to 92.54%. In addition, Red and NIR band information also promote the results to 91.06% and 91.44%, respectively. Therefore, it can be concluded that the extra two bands (NIR and RedEdge) information of the RedEdge camera can effectively promote the yellow rust segmentation performance. Second, the selected indices from [
2] shown in
Table 13 are also tested by our proposed method. It is apparent that corresponding indices of the top three
OA are Index 11, Index 13 and Index 15, where the
OA score of all three indices are higher than band-based features.
To evaluate whether these top ranked features are useful after their combination, a comparative study is also carried out. The combination of three band information and three indices are compared by referring to the metrics of
precision,
recall,
F1 and
OA. It follows from
Table 14 that band-based feature selection method is more superior than index-based feature selection method. In addition, it only gets 0.14% decrease in the
OA score compared with the results with inputs D (5 bands + 18 indices) and gets 2.28% promotion of the
OA score compared with inputs A (R,G,B). Therefore, it is convincing that we can take the Red-NIR-RE bands to replace the combination of 5 bands and 18 indexes and get the same performance. The findings in this section are drawn as follows:
- (1)
In 3-fold validation, the proposed method by different training and testing data can overcome original limited data problem, providing accurate and robust segmentation results in yellow rust detection.
- (2)
Overall, OA using individual index as input outperforms the original raw band information input as indices are formulated by various raw bands.
- (3)
Some particular indices, such as index 13, achieve almost the same OA score in comparison with inputs D, showing that the OA score is not positively correlated to the amount of inputs.
- (4)
The top 3 indices, index 11 (SAVI with Red-NIR bands), index 13 (OASVI with Red-NIR bands) and index 15 (EVI with Blue-Red-NIR bands) have the same components of Red and NIR bands, revealing that the combination of Red and NIR bands is extremely useful in index based feature.
- (5)
Red, NIR and Rededge band information play a paramount role and is much accurate and robust than RGB information in solving wheat yellow rust detection problem.
6. Conclusions and Future Work
This paper investigates the challenging problem of wheat yellow rust detection by integrating UAV multispectral imaging and deep learning method. In particular, IEM and IDM are fused into the basic UNet network to cope with irregular and blurred boundary problems of remote sensing dataset so that a more reliable and accurate Ir-UNet network is proposed for yellow rust disease detection automatically. Meanwhile, CCRM is also designed to optimise the feature weights and maximise the segmentation performance. All of the methods are validated on real-world UAV multipsectral wheat yellow rust disease dataset collected in Yangling experiment field. In performance evaluation, the proposed algorithm is compared with the basic UNet network and various network inputs, yielding the best segmentation performance among others (97.13% on OA score). Moreover, it is also shown that the use of three selected bands Red-NIR-RE in the proposed Ir-UNet can reach a comparative performance (OA: 96.83%).
Although the presented results are quite promising, there is still much room for further improvement. For example, in this study, only a small training dataset is used to evaluate the proposed algorithm performance. With the advert of a more labelled dataset, the performance can be assessed in a more accurate manner. Moreover, in addition to CNN network, the popular deep learning network such as Transformer [
54,
55] can also be drawn to learn the spectral, spatial and temporal information in an end-to-end manner and possibly further improve the final wheat yellow rust segmentation performance.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}