
Solar Contamination on HIRAS Cold Calibration View and the Corrected Radiance Assessment

 , ,
, , 
Abstract
:1. Introduction
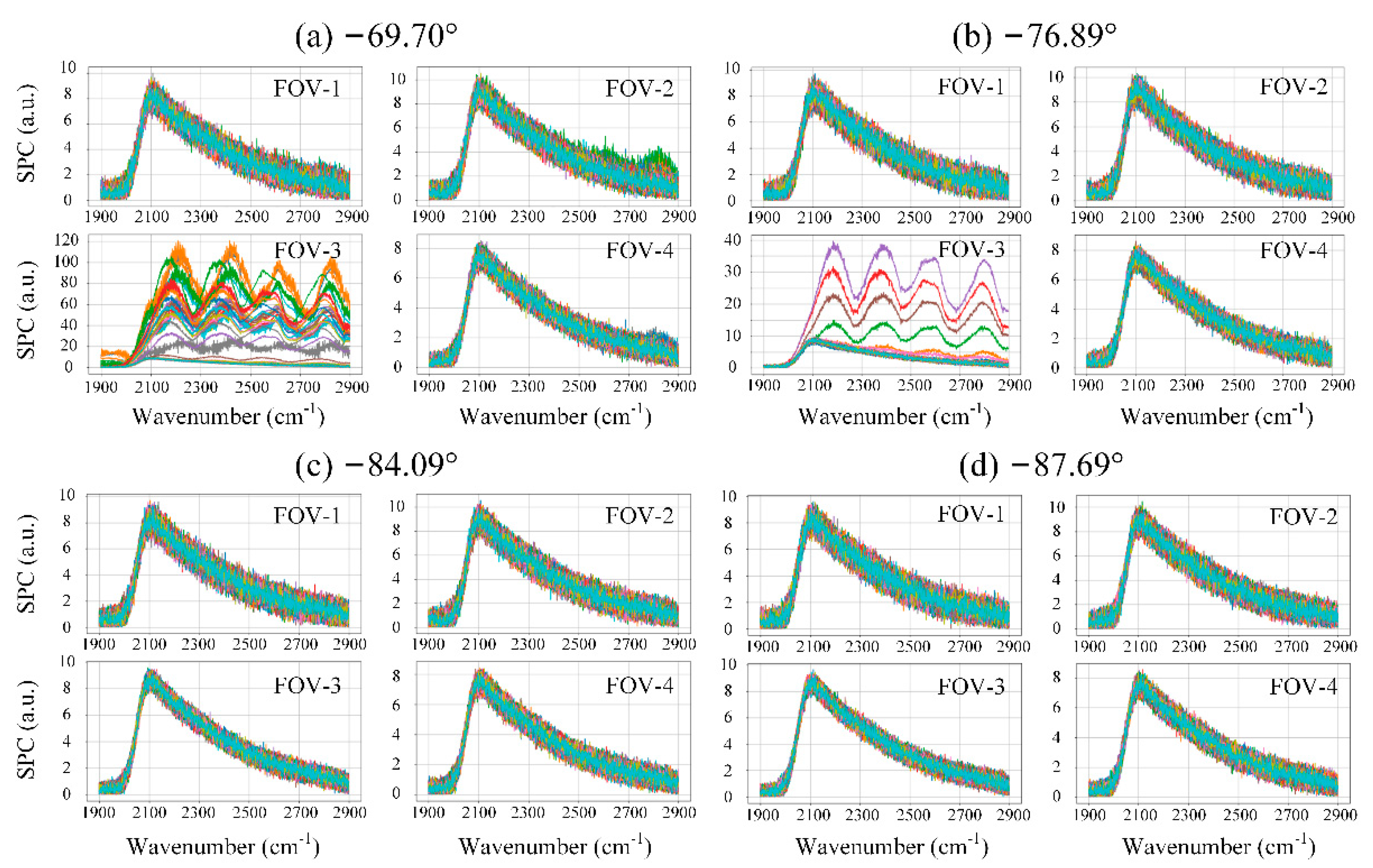
2. HIRAS Cold Space View Contamination by the Solar Stray Lights
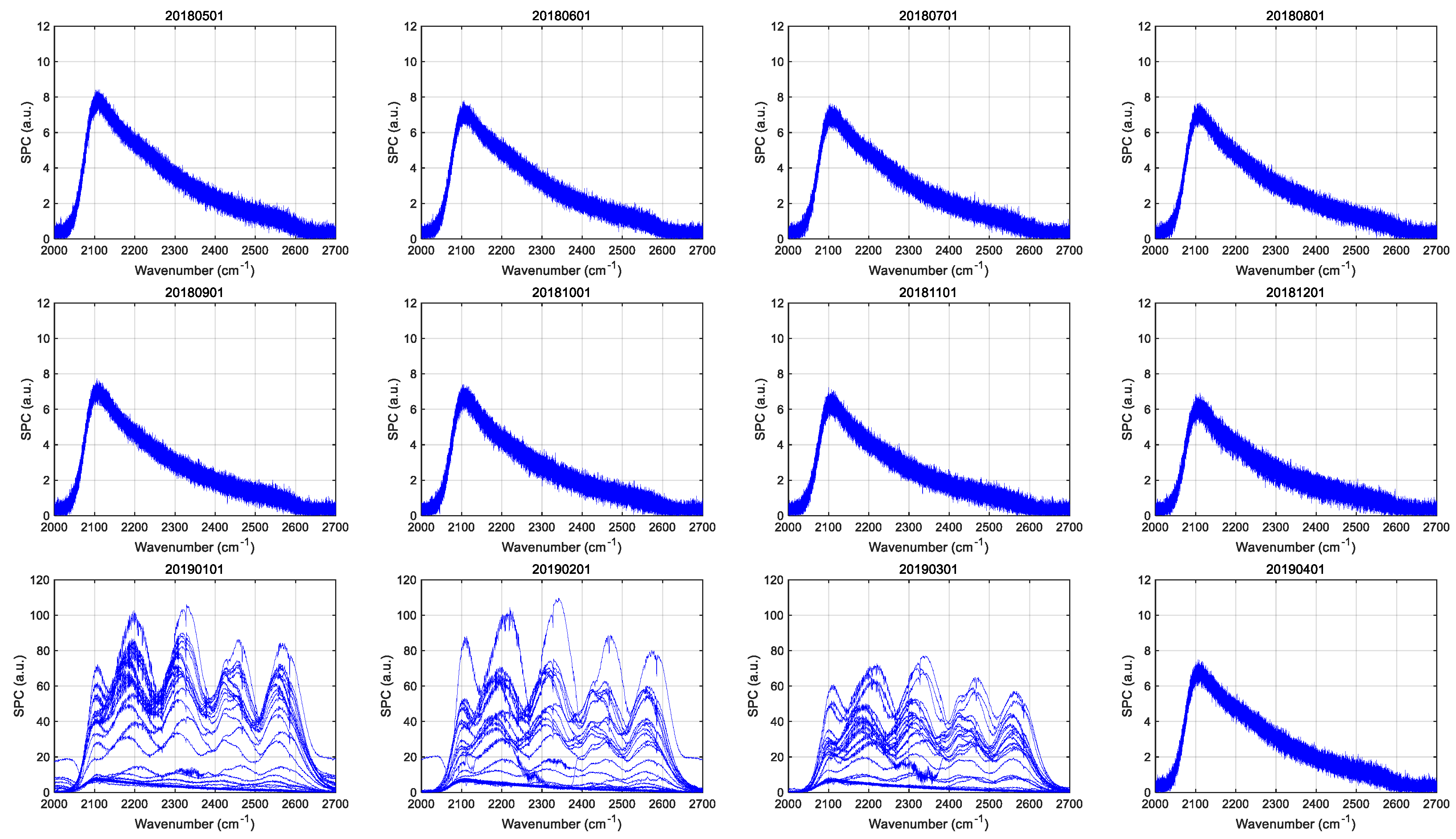
2.1. The Solar Contaminated DS Raw Spectra
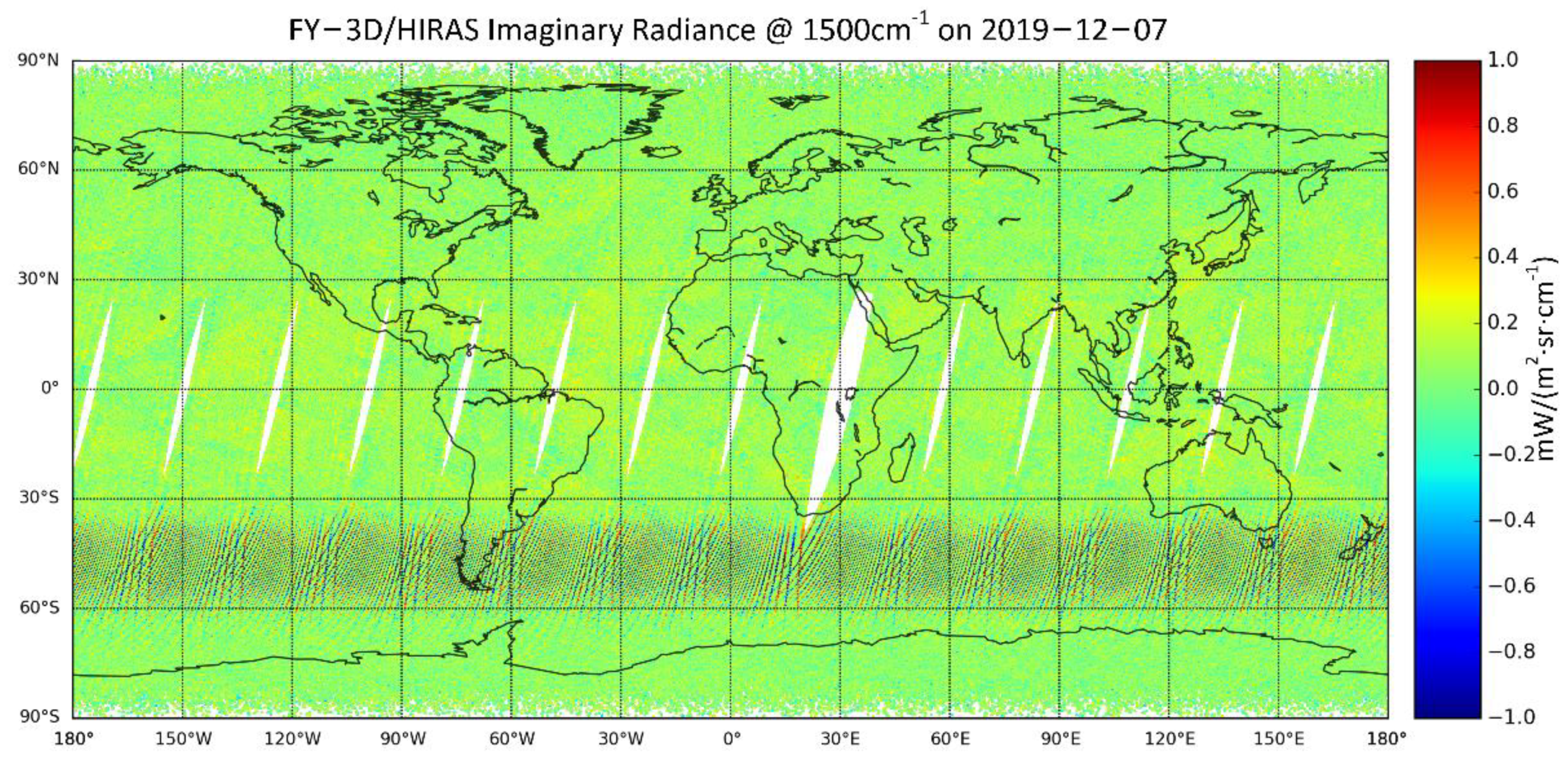
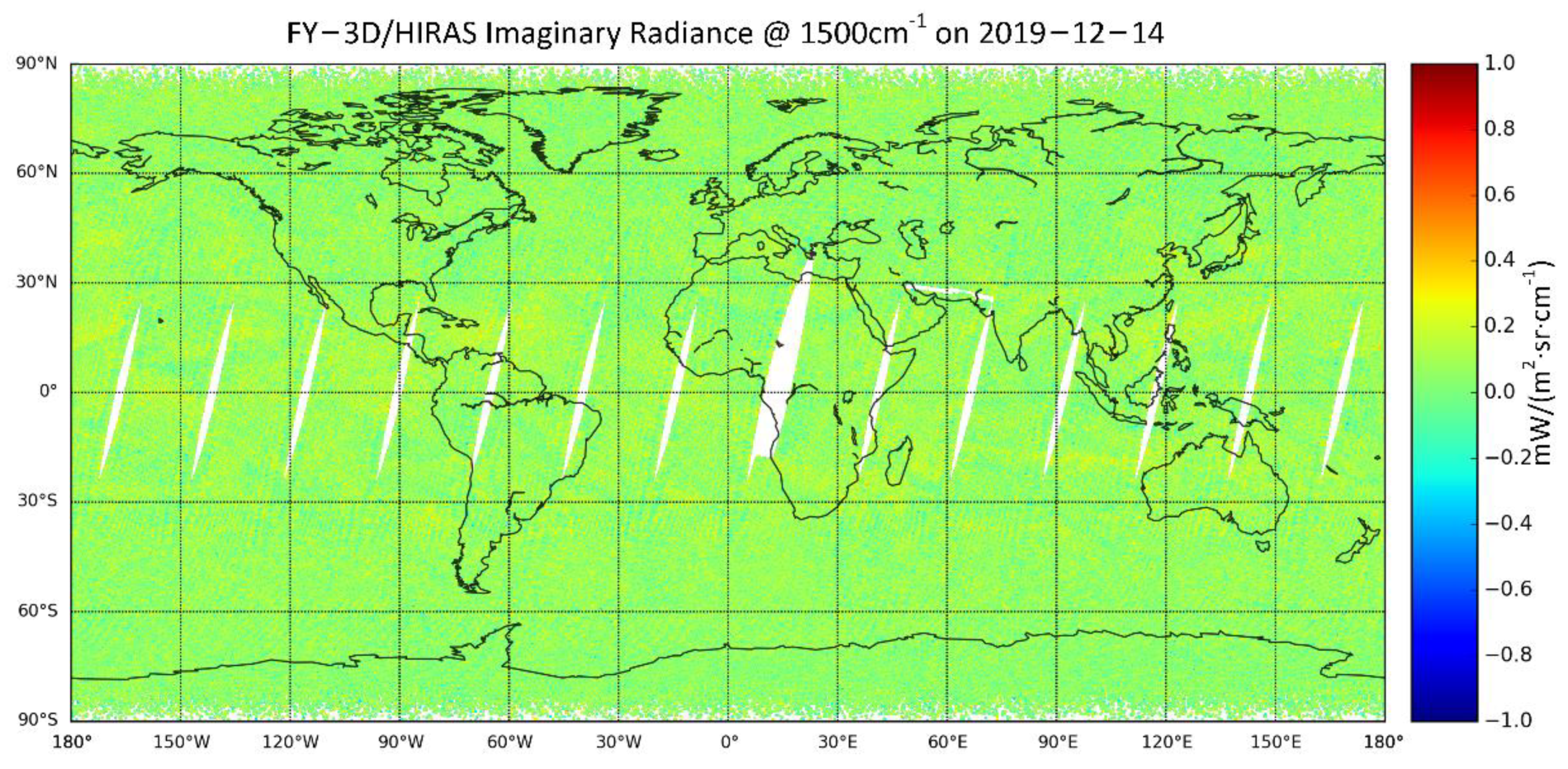
2.2. Cause Analysis of Cold View Contamination and the Effects on Radiometric Calibration
3. SSM Pointing Angle Adjustment for Stray Light Evasion
4. Correction Algorithm for Historic Contaminated Data and Accuracy Assessment to Re-Calibrated Radiance
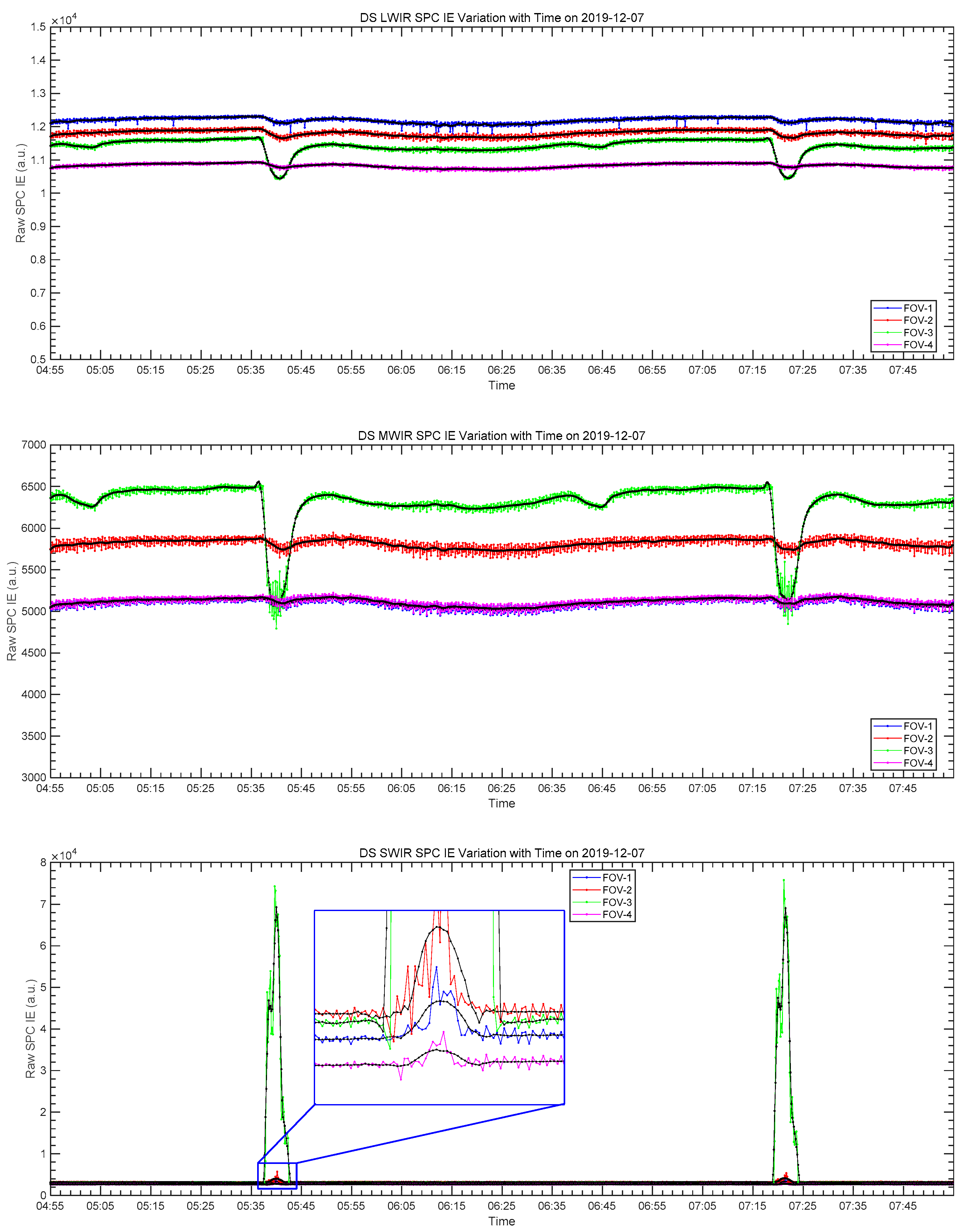
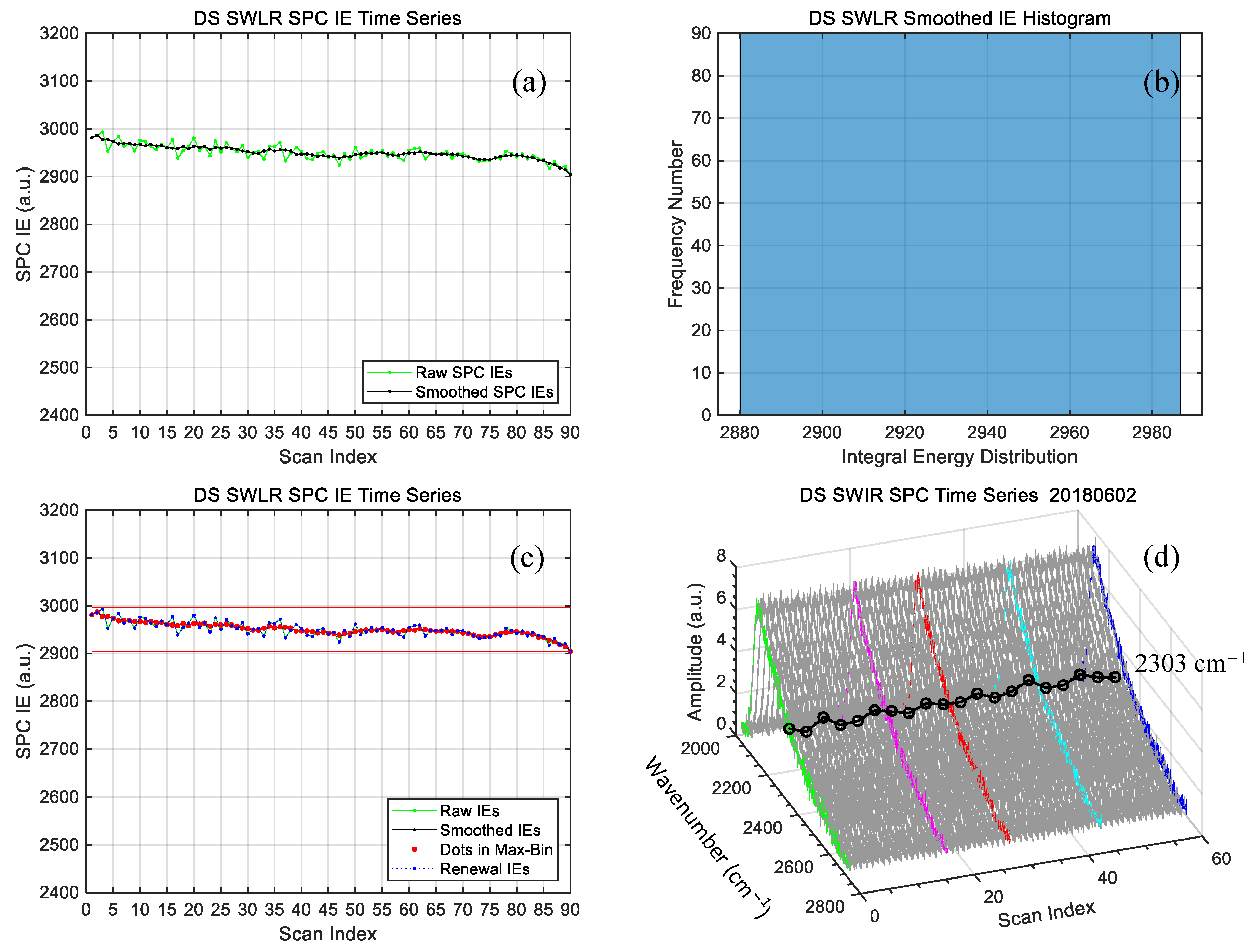
4.1. Time Series of DS Spectral Integrated Energy
4.2. Method for Correcting DS Contaminated Spectra Based on IE Breakpoint Detection
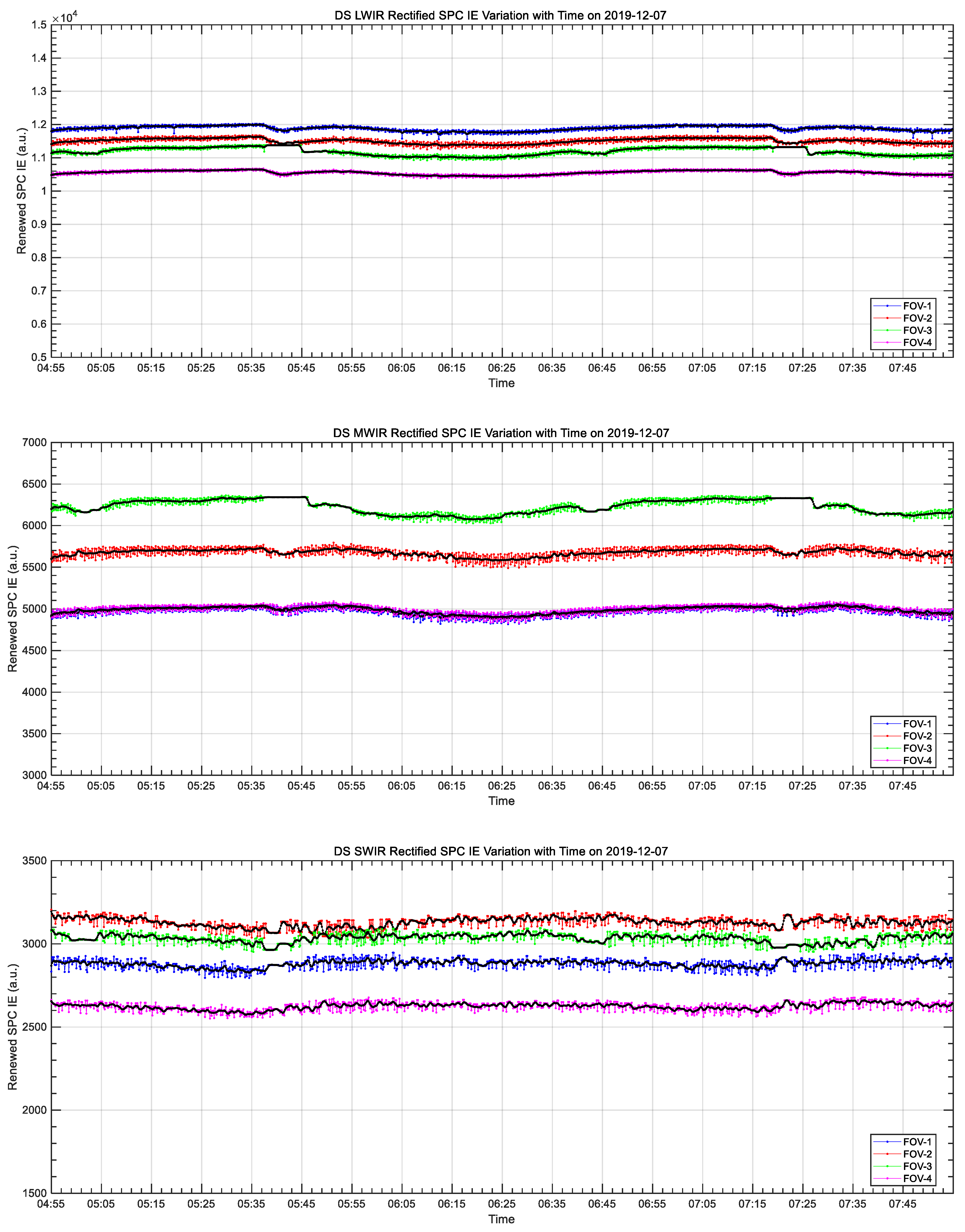
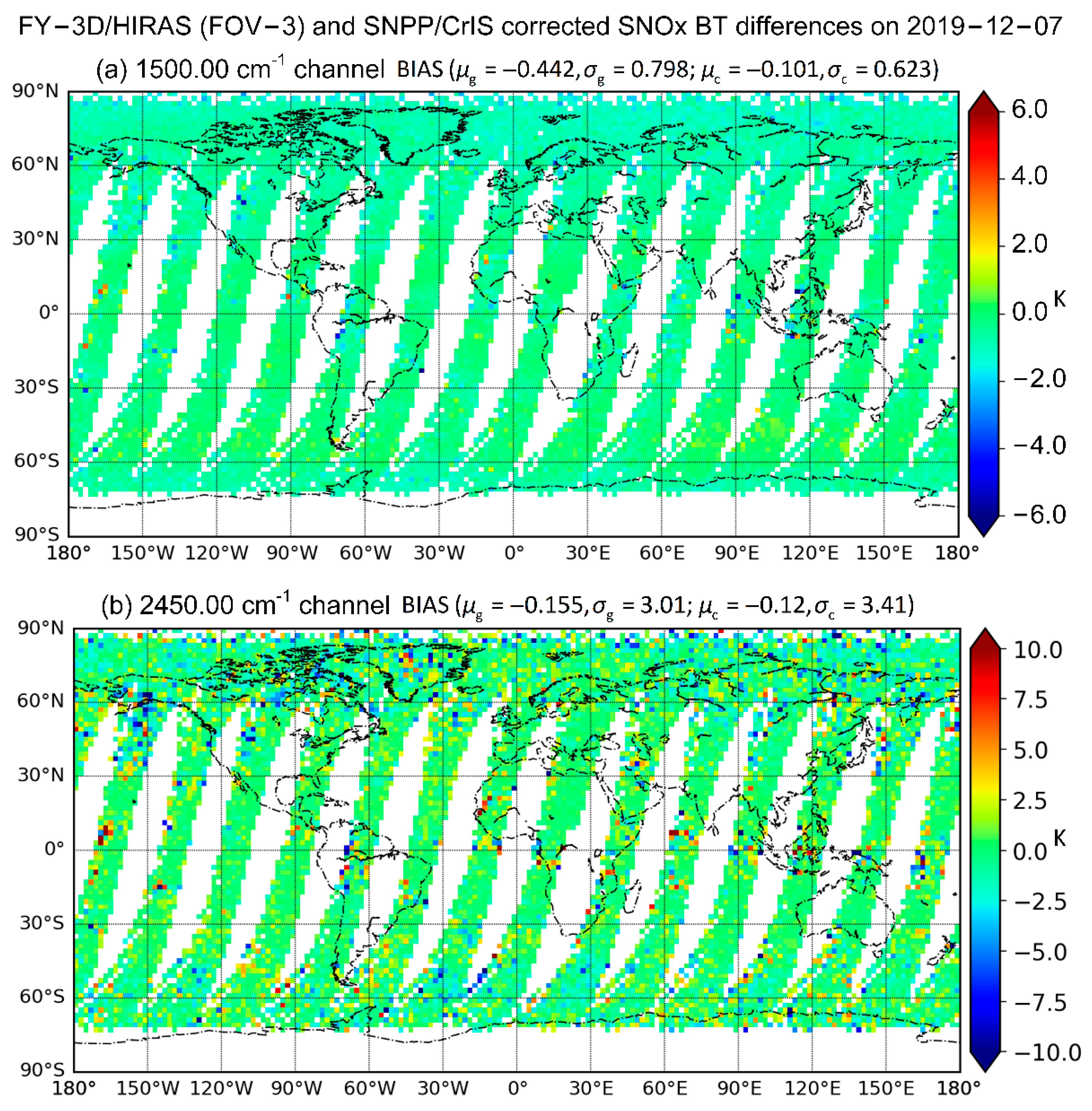
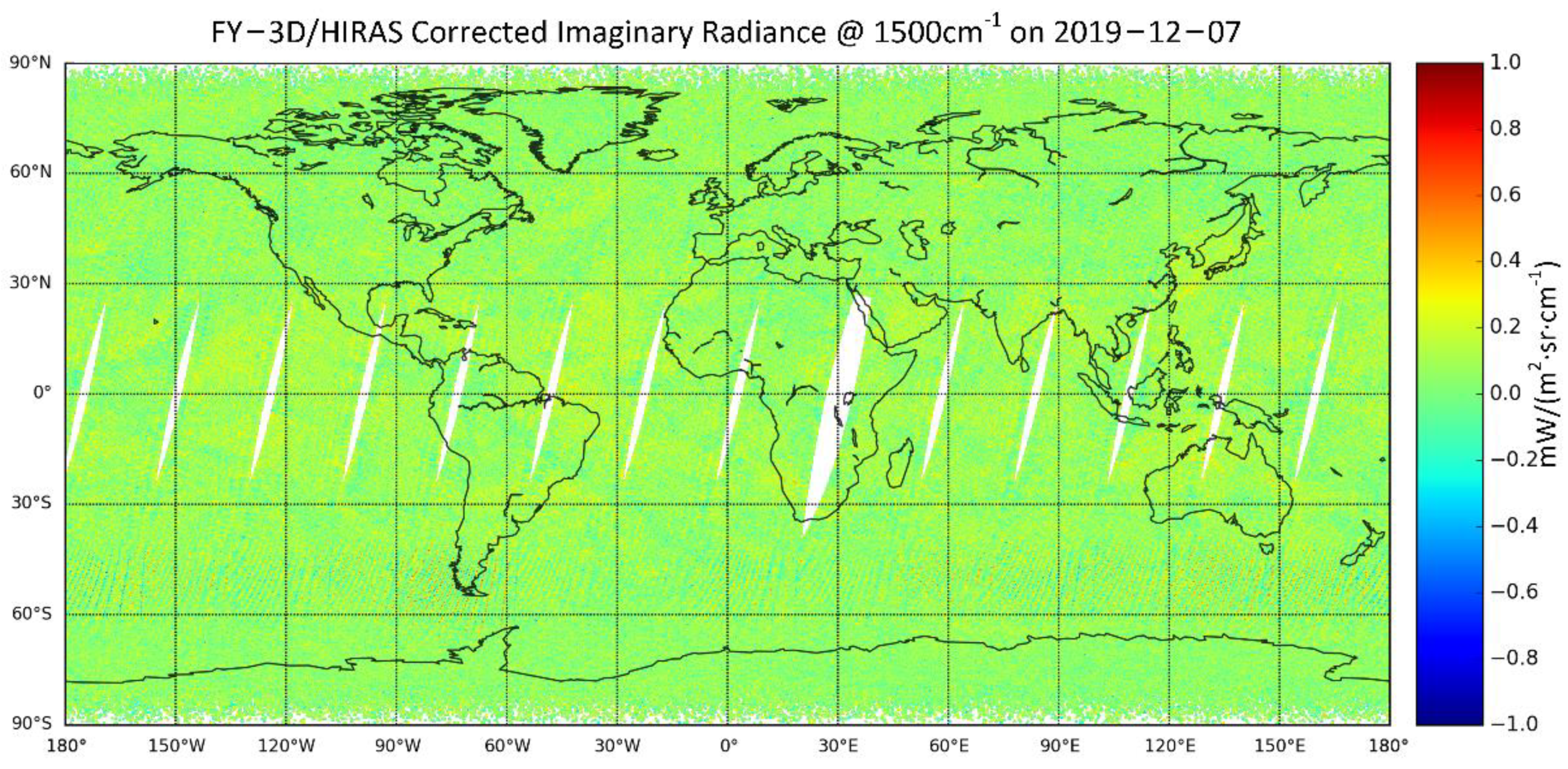
4.3. Historic Data Re-Calibration and Correction Algorithm Validation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Menzel, W.P.; Schmit, T.J.; Zhang, P.; Li, J. Satellite-based Atmospheric Infrared Sounder Development and Application. Bull. Am. Meteorol. Soc. 2018, 99, 583–603. [Google Scholar] [CrossRef]
- English, S.J.; Renshaw, R.J.; Dibben, P.C.; Smith, A.J.; Rayer, P.J.; Poulsen, C.; Saunders, F.W.; Eyre, J.R. A comparison of the impact of TOVS and ATOVS satellite sounding data on the accuracy of numerical weather forecasts. Q. J. R. Meteorol. Soc. 2000, 126, 2911–2931. [Google Scholar] [CrossRef]
- Hilton, F.; Atkinson, N.C.; English, S.J.; Eyre, J.R. Assimilation of IASI at the Met Office and assessment of its impact through observing system experiments. Q. J. R. Meteorol. Soc. 2009, 135, 495–505. [Google Scholar] [CrossRef]
- Smith, A.; Atkinson, N.; Bell, W.; Doherty, A. An initial assessment of observations from the Suomi-NPP satellite: Data from the Cross-track Infrared Sounder (CrIS). Atmos. Sci. Lett. 2015, 16, 260–266. [Google Scholar] [CrossRef]
- Hilton, F.; Armante, R.; August, T.; Barnet, C.; Bouchard, A.; Camy-Peyret, C.; Capelle, V.; Clarisse, L.; Clerbaux, C.; Coheur, P.F.; et al. Hyperspectral Earth observation from IASI: Five years of accomplishments. Bull. Am. Meteorol. Soc. 2012, 93, 347–370. [Google Scholar] [CrossRef]
- Qi, C.; Wu, C.; Hu, X.; Xu, H.; Lee, L.; Zhou, F.; Gu, M.; Yang, T.; Shao, C.; Yang, Z.; et al. High Spectral Infrared Atmospheric Sounder (HIRAS): System Overview and On-Orbit Performance Assessment. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4335–4352. [Google Scholar] [CrossRef]
- Wu, C.; Qi, C.; Hu, X.; Gu, M.; Yang, T.; Xu, H.; Lee, L.; Yang, Z.; Zhang, P. FY-3D HIRAS Radiometric Calibration and Accuracy Assessment. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3965–3976. [Google Scholar] [CrossRef]
- Revercomb, H.E.; Buijs, H.; Howell, H.B.; La Porte, D.D.; Smith, W.L.; Sromovsky, L. Radiometric calibration of IR Fourier transform spectrometers: Solution to a problem with the high-resolution interferometer sounder. Appl. Opt. 1988, 27, 3210–3218. [Google Scholar] [CrossRef] [PubMed]
- Han, Y.; Chen, Y. Calibration algorithm for cross-track infrared sounder full spectral resolution measurements. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1008–1016. [Google Scholar] [CrossRef]
- Carminati, F.; Xiao, X.; Lu, Q.; Atkinson, N.; Hocking, J. Assessment of the Hyperspectral Infrared Atmospheric Sounder (HIRAS). Remote Sens. 2019, 11, 2950. [Google Scholar] [CrossRef] [Green Version]
- Schreiber, J.; Blumenstock, T.; Fischer, H. Effects of the self-emission of an IR Fourier-transform spectrometer on measured absorption spectra. Appl. Opt. 1996, 35, 6203–6209. [Google Scholar] [CrossRef] [PubMed]
- Configuration Management Office, GSFC JPSS. Joint Polar Satellite System (JPSS) Cross Track Infrared Sounder (CrIS) Sensor Data Records (SDR) Algorithm Theoretical Basis Document (ATBD) (Revision C); Document Code 474: 474-00032; Goddard Space Flight Center: Greenbelt, MD, USA, 2014; pp. 33–34. Available online: http://docserver.gesdisc.eosdis.nasa.gov/public/project/JPSS-1/JPSS.CrIS.Sensor.Data.Record.ATBD.RevC.Code474_474-00032.pdf (accessed on 26 September 2021).
- Cao, C.; Weinreb, M.; Xu, H. Predicting Simultaneous Nadir Overpasses among Polar-Orbiting Meteorological Satellites for the Intersatellite Calibration of Radiometers. J. Atmos. Ocean. Technol. 2004, 21, 537–542. [Google Scholar] [CrossRef]
- Wang, L.; Han, Y.; Jin, X.; Chen, Y.; Tremblay, D. Radiometric consistency assessment of hyperspectral infrared sounders. Atmos. Meas. Tech. 2015, 8, 4831–4844. [Google Scholar] [CrossRef] [Green Version]
- Cao, C.; Uprety, S.; Blonski, S. Establishing radiometric consistency among VIIRS, MODIS, and AVHRR using SNO and SNOx methods. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22 July 2012. [Google Scholar] [CrossRef]
- Han, Y.; Revercomb, H.; Cromp, M.; Gu, D.; Johnson, D.; Mooney, D.; Scott, D.; Strow, L.; Bingham, G.; Brog, L.; et al. Suomi NPP CrIS measurements, sensor data record algorithm, calibration and validation activities, and record data quality. J. Geophys. Res. Atmos. 2013, 118, 734–748. [Google Scholar] [CrossRef]
- Zavyalov, V.; Esplin, M.; Scott, D.; Esplin, B.; Bingham, G.; Hoffman, E.; Lietzke, C.; Predina, J.; Frain, R.; Suwinski, L.; et al. Noise performance of the CrIS instrument. J. Geophys. Res. Atmos. 2013, 118, 13108–13120. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pointing Angle | Spectral Anomalies in FOV-3 | Spectral Anomalies in FOV-2 |
|---|---|---|
| −62.50° | yes | yes |
| −66.10° | yes | no |
| −69.70° | yes | no |
| −73.29° | yes | yes |
| −76.89° | yes | no |
| −80.48° | no | yes |
| −84.09° | no | no |
| −87.69° | no | no |
| −91.30° | no | no |
| −94.93° | no | no |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, L.; Wu, C.; Qi, C.; Hu, X.; Yuan, M.; Gu, M.; Shao, C.; Zhang, P. Solar Contamination on HIRAS Cold Calibration View and the Corrected Radiance Assessment. Remote Sens. 2021, 13, 3869. https://doi.org/10.3390/rs13193869
Lee L, Wu C, Qi C, Hu X, Yuan M, Gu M, Shao C, Zhang P. Solar Contamination on HIRAS Cold Calibration View and the Corrected Radiance Assessment. Remote Sensing. 2021; 13(19):3869. https://doi.org/10.3390/rs13193869
Chicago/Turabian StyleLee, Lu, Chunqiang Wu, Chengli Qi, Xiuqing Hu, Mingge Yuan, Mingjian Gu, Chunyuan Shao, and Peng Zhang. 2021. "Solar Contamination on HIRAS Cold Calibration View and the Corrected Radiance Assessment" Remote Sensing 13, no. 19: 3869. https://doi.org/10.3390/rs13193869
APA StyleLee, L., Wu, C., Qi, C., Hu, X., Yuan, M., Gu, M., Shao, C., & Zhang, P. (2021). Solar Contamination on HIRAS Cold Calibration View and the Corrected Radiance Assessment. Remote Sensing, 13(19), 3869. https://doi.org/10.3390/rs13193869