
The Operational Inflight Radiometric Uniform Calibration of a Directional Polarimetric Camera

 ,
,  ,
,
Abstract
:1. Introduction
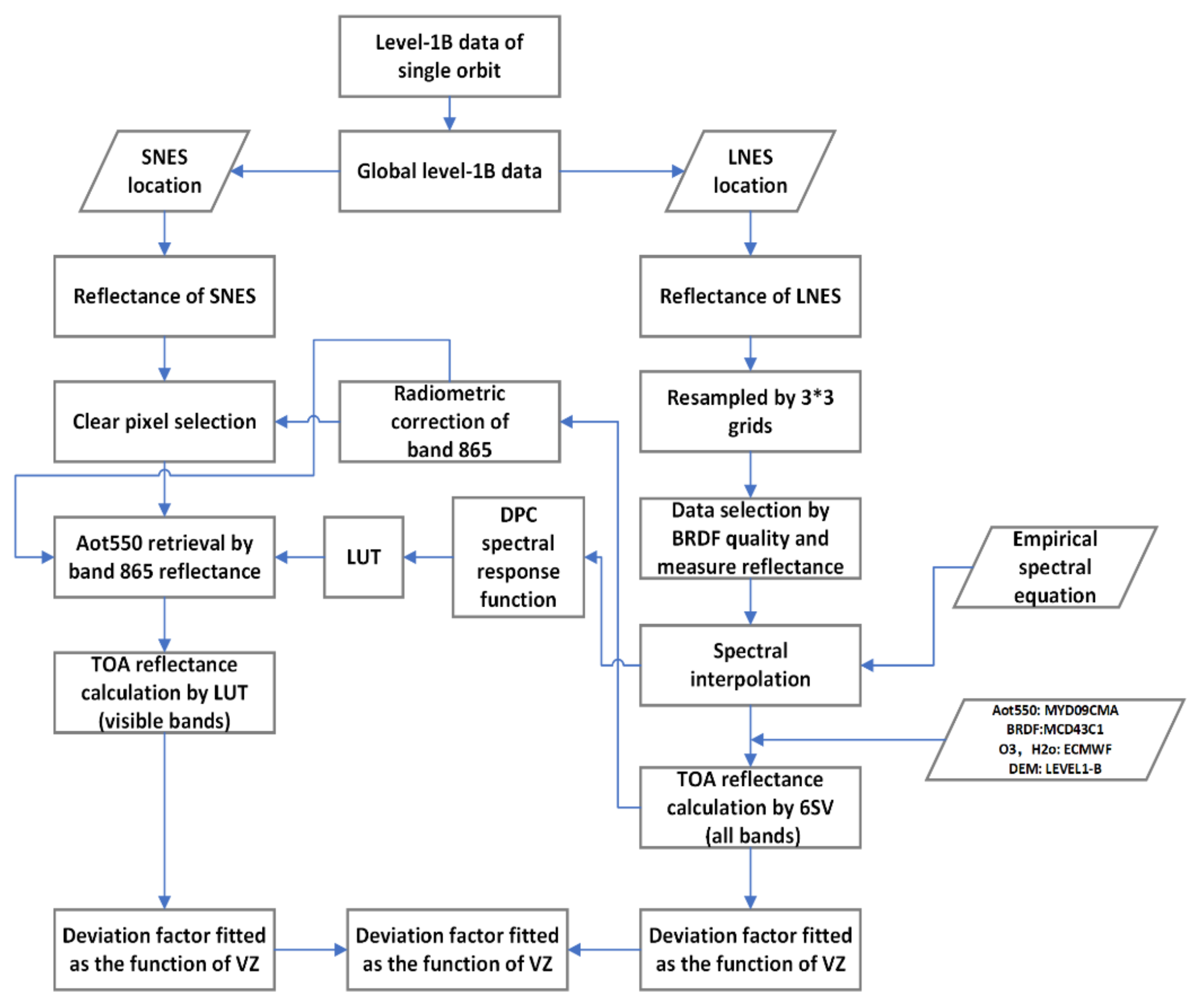
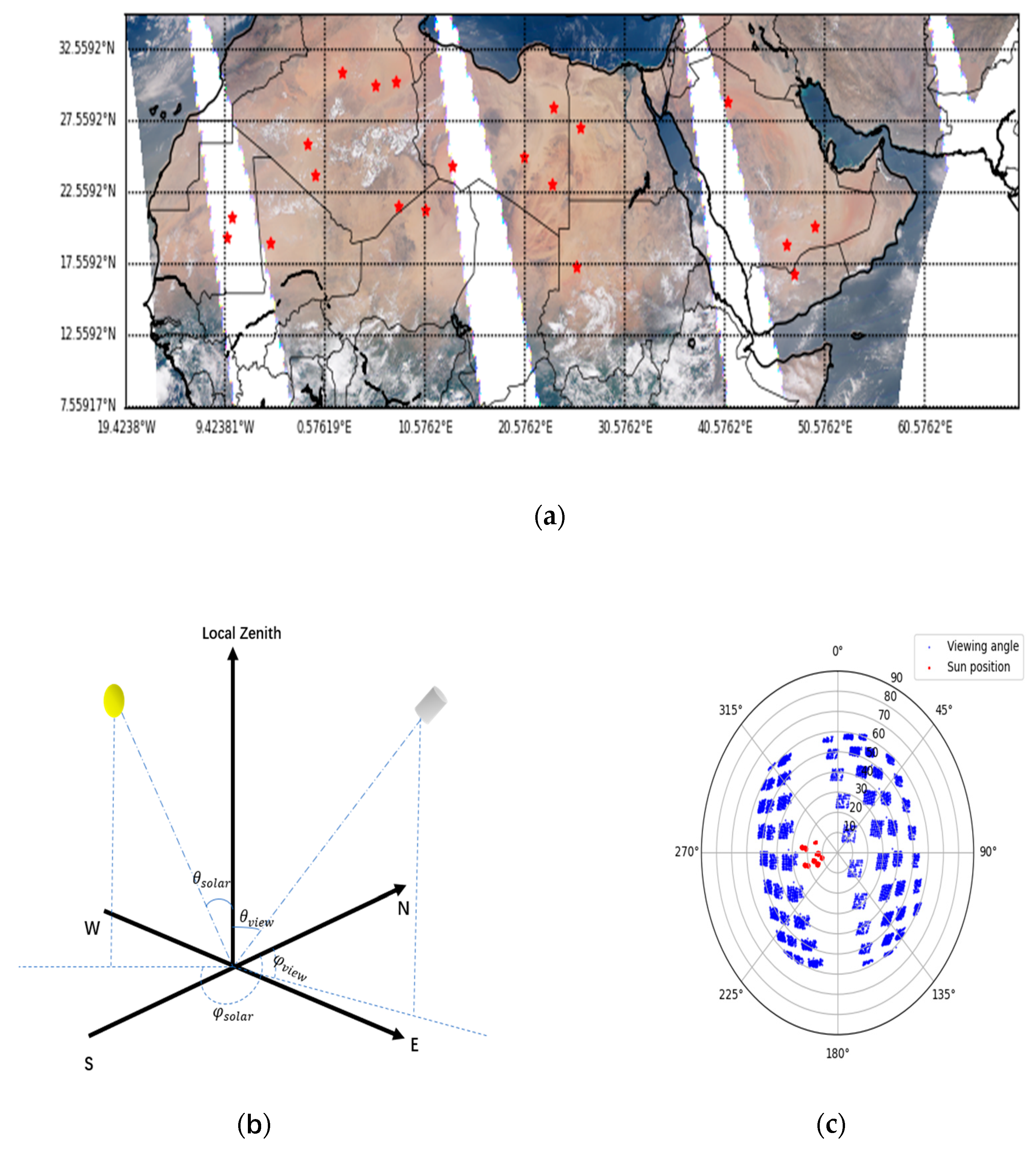
2. Materials and Methods
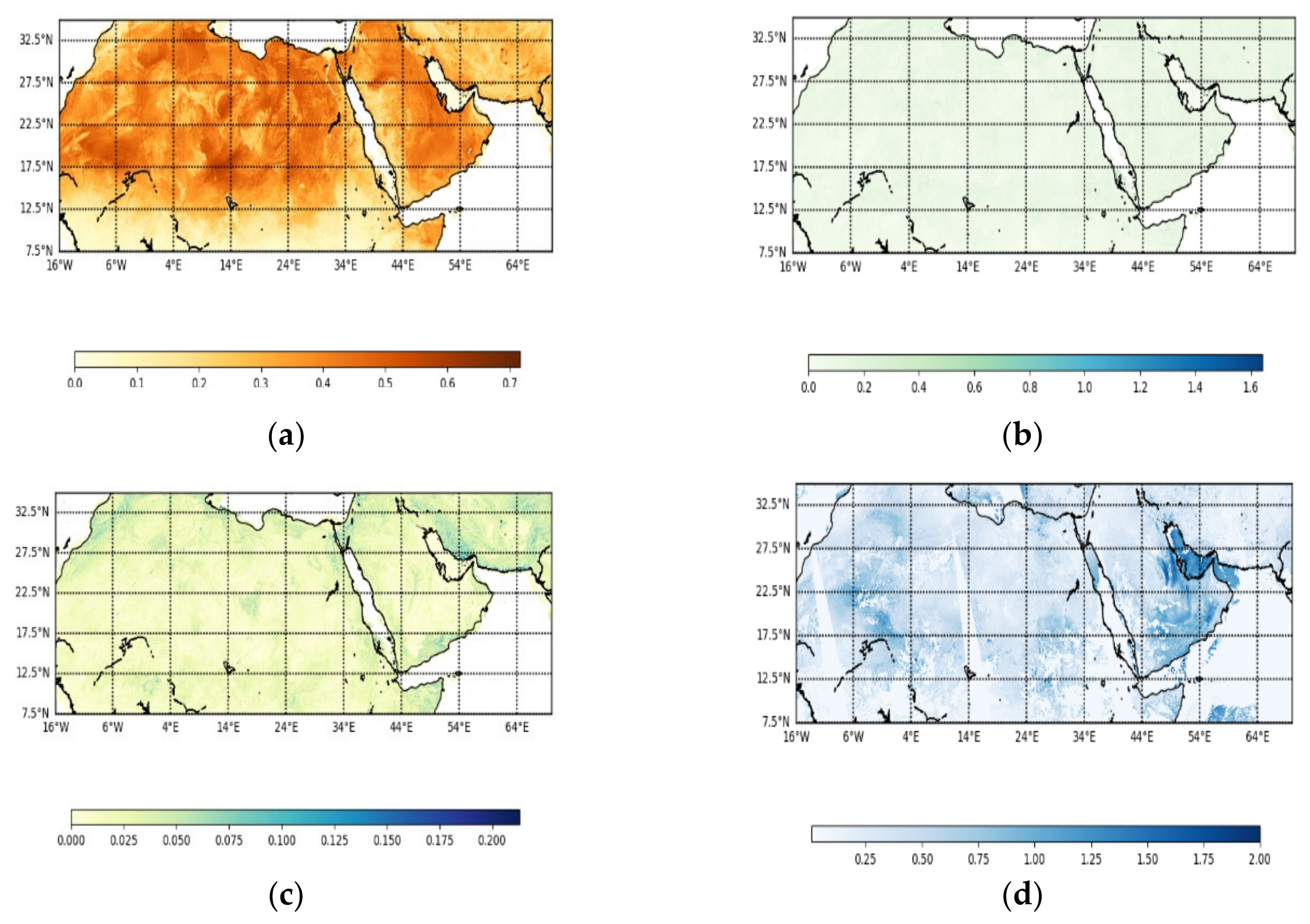
3. Results
3.1. Desert Calibration Results
3.2. SNES Calibration Results
4. Calibration Errors and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DPC | Directional polarimetric camera |
| SNES | Sea non-equipped site |
| LNES | Land non-equipped site |
| POLDER | Polarization and Directionality of the Earth’s Reflectance |
| GF-5A | GaoFen-5(A) satellite |
| BRDF | Bidirectional reflectance distribution function |
| 6SV | Second Simulation of a Satellite Signal in the Solar Spectrum – Vector |
| Py6S | Python interface to the 6SV |
| ECMWF | European Centre for Medium-Range Weather Forecasts |
| MODIS | Moderate-resolution imaging spectroradiometer |
| AOT | Aerosol optical thickness |
| TOA | Top of atmosphere |
| LUT | Look-up table |
| NIR | Near infrared |
| VIS | Visible |
| GIOVANNI | GES-DISC Interactive Online Visualization and Analysis Infrastructure |
References
- Li, Z.; Hou, W.; Hong, J.; Zheng, F.; Luo, D.; Wang, J.; Xingfa, G.; Qiao, Y. Directional Polarimetric Camera (DPC): Monitoring aerosol spectral optical properties over land from satellite observation. J. Quant. Spectrosc. Radiat. Transf. 2018, 218, 21–37. [Google Scholar] [CrossRef]
- Huang, C.; Zhang, M.; Chang, Y.; Chen, F.; Han, L.; Meng, B.; Hong, J.; Luo, D.; Li, S.; Sun, L.; et al. Directional polarimetric camera stray light analysis and correction. Appl. Opt. 2019, 58, 7042. [Google Scholar] [CrossRef]
- Huang, C.; Xiang, G.; Chang, Y.; Han, L.; Zhang, M.; Li, S.; Tu, B.; Meng, B.; Hong, J. Pre-flight calibration of a multi-angle polarimetric satellite sensor directional polarimetric camera. Opt. Express 2020, 28, 13187–13215. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.; Meng, B.; Chang, Y.; Chen, F.; Zhang, M.; Han, L.; Xiang, G.; Tu, B.; Hong, J. Geometric calibration method based on a two-dimensional turntable for a directional polarimetric camera. Appl. Opt. 2020, 59, 226. [Google Scholar] [CrossRef] [PubMed]
- Frouin, R.; Sei, A.; Hauss, B.; Pratt, P. Operational in-flight calibration of S-NPP VIIRS in the visible using Rayleigh scattering. In Earth Observing Systems XIX; SPIE: San Diego, CA, USA, 2014. [Google Scholar]
- Goloub, P.; Toubbe, B.; Herman, M.; Bailleul, T.; Hagolle, O.; Martinuzzi, J.-M.; Rouge, B. In-flight polarization calibration of POLDER[C]. Advanced and Next-Generation Satellites II. Int. Soc. Opt. Photonics 1997, 2957, 299–310. [Google Scholar]
- Bourg, L.; Delwart, S. MERIS Instrument Calibration. Meris & Aatsr Calibration & Geophysical Validation. In Proceedings of the MERIS and AATSR Calibration and Geophysical Validation (MAVT-2006), Taormina, Italy, 20–24 March 2006. [Google Scholar]
- Fougnie, B.; Bracco, G.; Lafrance, B.; Ruffel, C.; Hagolle, O.; Tinel, C. PARASOL in-flight calibration and performance. Appl. Opt. 2007, 46, 5435–5451. [Google Scholar] [CrossRef] [Green Version]
- Hagolle, O.; Goloub, P.; Deschamps, P.Y.; Cosnefroy, H.; Briottet, X.; Bailleul, T.; Nicolas, J.-M.; Parol, F.; Lafrance, B.; Herman, M. Results of POLDER in-flight calibration. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1550–1566. [Google Scholar] [CrossRef] [Green Version]
- Lacherade, S.; Fougnie, B.; Henry, P.; Gamet, P. Cross Calibration Over Desert Sites: Description, Methodology, and Operational Implementation. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1098–1113. [Google Scholar] [CrossRef]
- Shukla, B.P.; Sathiyamoorthy, V.; Pal, P.K. Determination of Angular Distribution Models for Indian desert scene: Comparison with other desert models. Adv. Space Res. 2009, 43, 1931–1939. [Google Scholar] [CrossRef]
- Fougnie, B. Improvement of the PARASOL Radiometric In-Flight Calibration Based on Synergy Between Various Methods Using Natural Targets. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2140–2152. [Google Scholar] [CrossRef]
- Zhou, Q.; Tian, L.; Li, J.; Li, W. Assessment of bidirectional reflectance effects on desert and forest for radiometric cross-calibration of satellite sensors. ISPRS J. Photogramm. Remote. Sens. 2020, 160, 180–194. [Google Scholar] [CrossRef]
- Vermote, E.; Santer, R.; Deschamps, P.Y.; Herman, M. In-flight calibration of large field of view sensors at short wavelengths using Rayleigh scattering. Int. J. Remote. Sens. 1992, 13, 3409–3429. [Google Scholar] [CrossRef]
- Fougnie, B.; Henry, P.; Morel, A.; Antoine, D.; Montagner, F. Identification and characterization of stable homogeneous oceanic zones: Climatology and impact on in-flight calibration of space sensor over Rayleigh scattering. In Proceedings of the Ocean Optics XVI Conference, Santa Fe, NM, USA, 18–22 November 2002. [Google Scholar]
- Chen, X.; Xing, J.; Liu, L.; Li, Z.; Mei, X.; Fu, Q.; Xie, Y.; Ge, B.; Li, K.; Xu, H. In-flight calibration of GF-1/WFV visible channels using Rayleigh scattering. Remote Sens. 2017, 9, 513. [Google Scholar] [CrossRef] [Green Version]
- Wang, M. The Rayleigh lookup tables for the SeaWiFS data processing: Accounting for the effects of ocean surface roughness. Int. J. Remote Sens. 2002, 23, 2693–2702. [Google Scholar] [CrossRef]
- Miesch, C.; Cabot, F.; Briottet, X.; Henry, P. Assimilation method to derive spectral ground reflectance of desert sites from satellite datasets. Remote Sens. Environ. 2003, 87, 359–370. [Google Scholar] [CrossRef]
- Strahler, A.H.; Barnsley, M.J.; d’Entremont, R.; Hu, B.; Lewis, P.; Li, X. MODIS BRDF/Albedo Product: Algorithm Theoretical Bais Document v3.2. 1995. Available online: http://www.eospso.nasa.gov (accessed on 26 July 2021).
- Huang, H.; Bo, Z.; Liu, Q.; Sun, L. Retrieving BRDF of desert using time series of MODIS imagery. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011. [Google Scholar]
- Govaerts, Y.M.; Clerici, M. Evaluation of radiative transfer simulation accuracy over bright desert calibration sites. Adv. Space Res. 2003, 32, 2201–2210. [Google Scholar] [CrossRef]
- Govaerts, Y.; Sterckx, S.; Adriaensen, S. Use of simulated reflectances over bright desert target as an absolute calibration reference. Remote Sens. Lett. 2013, 4, 523–531. [Google Scholar] [CrossRef]
- Wilson, R.T. Py6S: A Python interface to the 6S radiative transfer model. Comput. Geoences 2013, 51, 166–171. [Google Scholar]
- Vermote, E.; Tanré, D.; Deuzé, J.L.; Herman, M.; Morcrette, J.J.; Kotchenova, S.Y. Second Simulation of a Satellite Signal in the Solar Spectrum-Vector (6SV); NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2006. [Google Scholar]
- Schaaf, C.B.; Gao, F.; Strahler, A.H.; Lucht, W.; Li, X.; Tsang, T.; Strugnell, N.C.; Zhang, X.; Jin, Y.; Muller, J.-P.; et al. First operational BRDF, albedo nadir reflectance products from MODIS. Remote Sens. Environ. 2002, 83, 135–148. [Google Scholar] [CrossRef] [Green Version]
- Sterckx, S.; Livens, S.; Adriaensen, S. Rayleigh, Deep Convective Clouds, and Cross-Sensor Desert Vicarious Calibration Validation for the PROBA-V Mission. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1437–1452. [Google Scholar] [CrossRef]
- Tu, B.; Hong, J.; Yao, P.; Meng, H.; Yuan, L.; Zhang, M.; Weng, W. Polarization Detection Performance of Directional Polarimetric Camera. Acta Opt. Sin. 2020, 40, 0712003. [Google Scholar]
- Li, L.; Dubovik, O.; Derimian, Y.; Schuster, G.L.; Lapyonok, T.; Litvinov, P.; Ducos, F.; Fuertes, D.; Chen, C.; Li, Z.; et al. Retrieval of aerosol components directly from satellite and ground-based measurements. Atmos. Chem. Phys. 2019, 19, 13409–13443. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Ma, J.; Yang, P.; Li, Z. Detection of cloud cover using dynamic thresholds and radiative transfer models from the polarization sattllite image. J. Quant. Spectrosc. Radiat. Trnsfer 2019, 222, 196–214. [Google Scholar] [CrossRef]
- Harmel, T.; Chami, M. Influence of polarimetric satellite data measured in the visible region on aerosol detection and on the performance of atmospheric correction procedure over open ocean waters. Opt. Express 2011, 19, 20960–20983. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
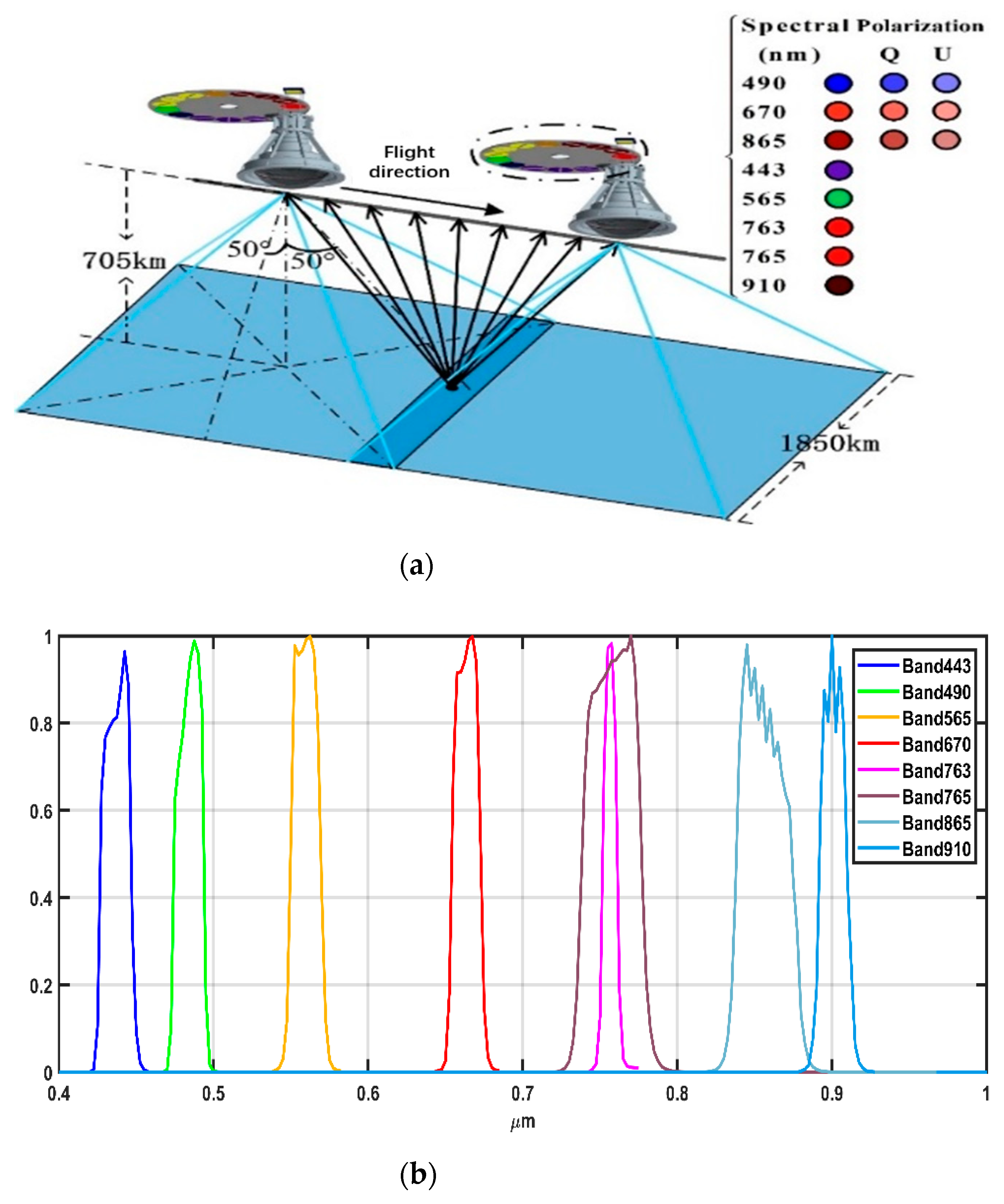
| Band (nm) | 443 | 490 | 565 | 670 | 763 | 765 | 865 | 910 |
|---|---|---|---|---|---|---|---|---|
| Polarization | No | Yes | No | Yes | No | No | Yes | No |
| Central wavelength (nm) | 443.3 | 488.9 | 564.7 | 668.8 | 761.4 | 763.1 | 861.8 | 907.1 |
| Band width (nm) | 20 | 20 | 20 | 20 | 10 | 40 | 40 | 10 |
| Saturation reflectance | 1.2 | 1.2 | 1.2 | 1.15 | 0.7 | 1.0 | 1.2 | 0.8 |
| Band | |||
|---|---|---|---|
| Band 763 | 0.94/1.00 | 0.95/1.01 | 0.97/1.03 |
| Band 765 | 0.94/1.00 | 0.97/1.03 | 0.99/1.05 |
| Band 865 | 0.92/1.00 | 0.95/1.03 | 0.95/1.03 |
| Band 910 | 0.92/1.00 | 0.94/1.02 | 0.93/1.01 |
| Site Name | ||
|---|---|---|
| AltS | −19.9°–−9.9° | −32.3°–−11.0° |
| PacSE | −44.9°–−20.7° | −130.2°–−89° |
| PacNW | 10.0°–22.7° | 139.5°–165.6° |
| AltN | 17.0°–27.0° | −62.5°–−44.2° |
| IndS | −29.9°–−21.2° | 89.5°–100.1° |
| PacN | 15.0°–23.5° | −179.0°–−160.0° |
| Band | Site | |||||
|---|---|---|---|---|---|---|
| 443 | SNES | 0.89/1.00 | 0.91/1.02 | 0.96/1.08 | 1.00/1.12 | 0.97/1.09 |
| LNES | 0.88/1.00(Predict) | 0.92/1.05 | 0.95/1.08 | 1.02/1.16 | 1.02/1.16 | |
| 490 | SNES | 0.90/1.00 | 0.92/1.02 | 0.97/1.08 | 1.00/1.11 | 1.00/1.11 |
| LNES | 0.87/1.00(Predict) | 0.88/1.01 | 0.93/1.07 | 1.00/1.15 | 1.02/1.17 | |
| 565 | SNES | 0.87/1.00 | 0.92/1.06 | 0.95/1.09 | 0.97/1.11 | 0.98/1.13 |
| LNES | 0.88/1.00(Predict) | 0.92/1.05 | 0.97// 1.10 | 1.02/1.16 | 1.02/1.16 | |
| 670 | SNES | 0.90/1.00 | 0.94/1.04 | 0.95/1.06 | 0.97/1.08 | 0.97/1.08 |
| LNES | 0.90/1.00(Predict) | 0.94/1.04 | 0.94/1.05 | 0.98/1.09 | 1.00/1.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, F.; Luo, D.; Li, S.; Yang, B.; Sun, L.; Ge, S.; Hong, J. The Operational Inflight Radiometric Uniform Calibration of a Directional Polarimetric Camera. Remote Sens. 2021, 13, 3823. https://doi.org/10.3390/rs13193823
Chen F, Luo D, Li S, Yang B, Sun L, Ge S, Hong J. The Operational Inflight Radiometric Uniform Calibration of a Directional Polarimetric Camera. Remote Sensing. 2021; 13(19):3823. https://doi.org/10.3390/rs13193823
Chicago/Turabian StyleChen, Feinan, Donggen Luo, Shuang Li, Benyong Yang, Liang Sun, Shule Ge, and Jin Hong. 2021. "The Operational Inflight Radiometric Uniform Calibration of a Directional Polarimetric Camera" Remote Sensing 13, no. 19: 3823. https://doi.org/10.3390/rs13193823
APA StyleChen, F., Luo, D., Li, S., Yang, B., Sun, L., Ge, S., & Hong, J. (2021). The Operational Inflight Radiometric Uniform Calibration of a Directional Polarimetric Camera. Remote Sensing, 13(19), 3823. https://doi.org/10.3390/rs13193823