
Combining Remote-Sensing-Derived Data and Historical Maps for Long-Term Back-Casting of Urban Extents

 ,
,  ,
, 
Abstract

1. Introduction
- (1)
- Is the integrated use of signals from historical maps and from remote sensing data beneficial for the field of urban analysis?
- (2)
- What are the challenges and the requirements for an analytical framework in order to be used for the joint analysis of historical maps and remote sensing data?
- (3)
- How do the extracted urban areas from historical maps agree with other spatial-historical datasets?
2. Materials and Methods
2.1. Data and Study Areas
2.1.1. Global Human Settlement Layer
2.1.2. Historical Maps
2.1.3. HISDAC-US
2.1.4. HYDE Database
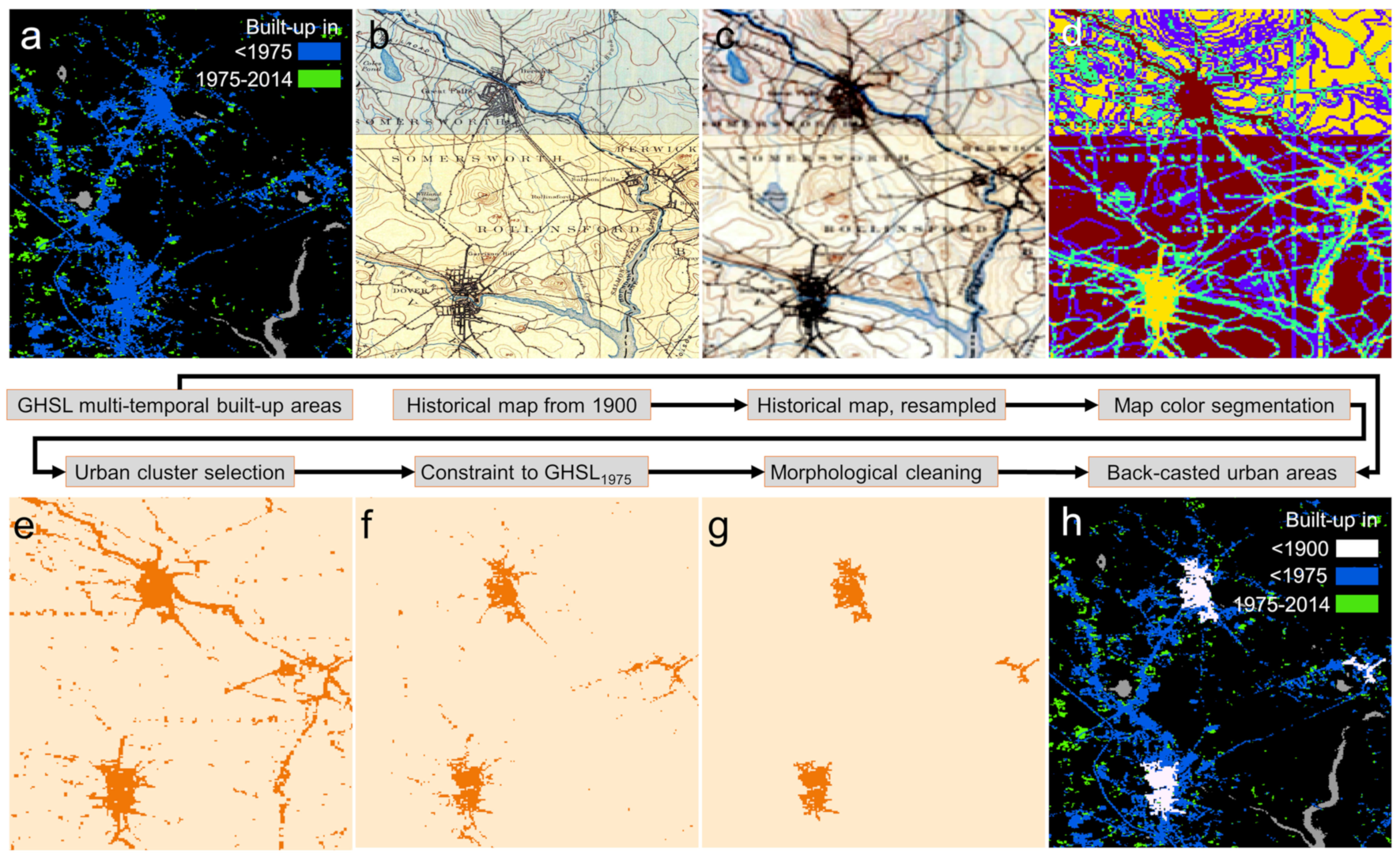
2.2. Methods
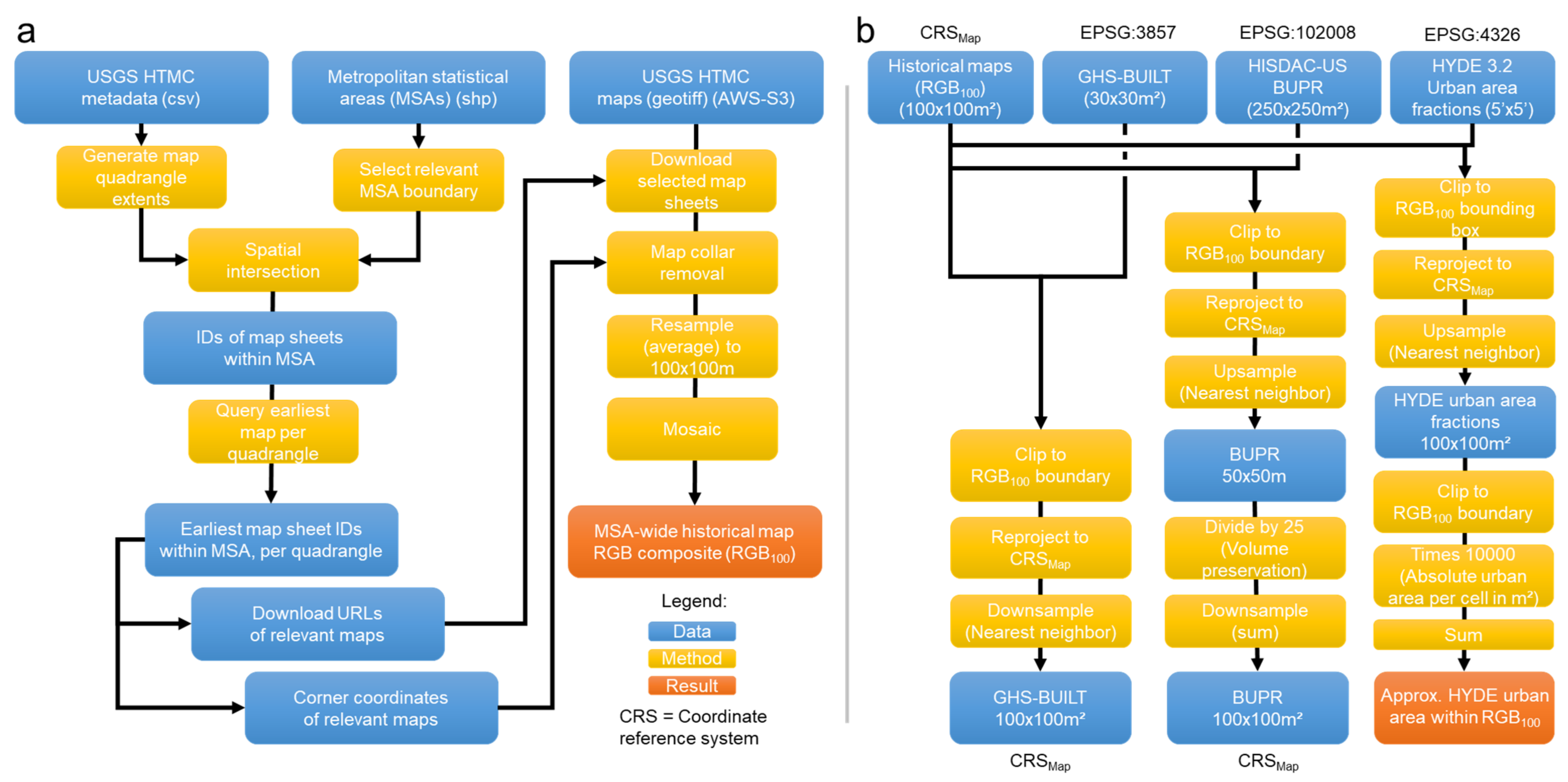
2.2.1. Preprocessing
2.2.2. Urban Area Extraction
2.2.3. Spatial Evaluation
2.2.4. Temporal Plausibility Analysis
3. Results
3.1. ROC Analysis against Historical HISDAC-US Building Densities
3.2. Clustering Analysis
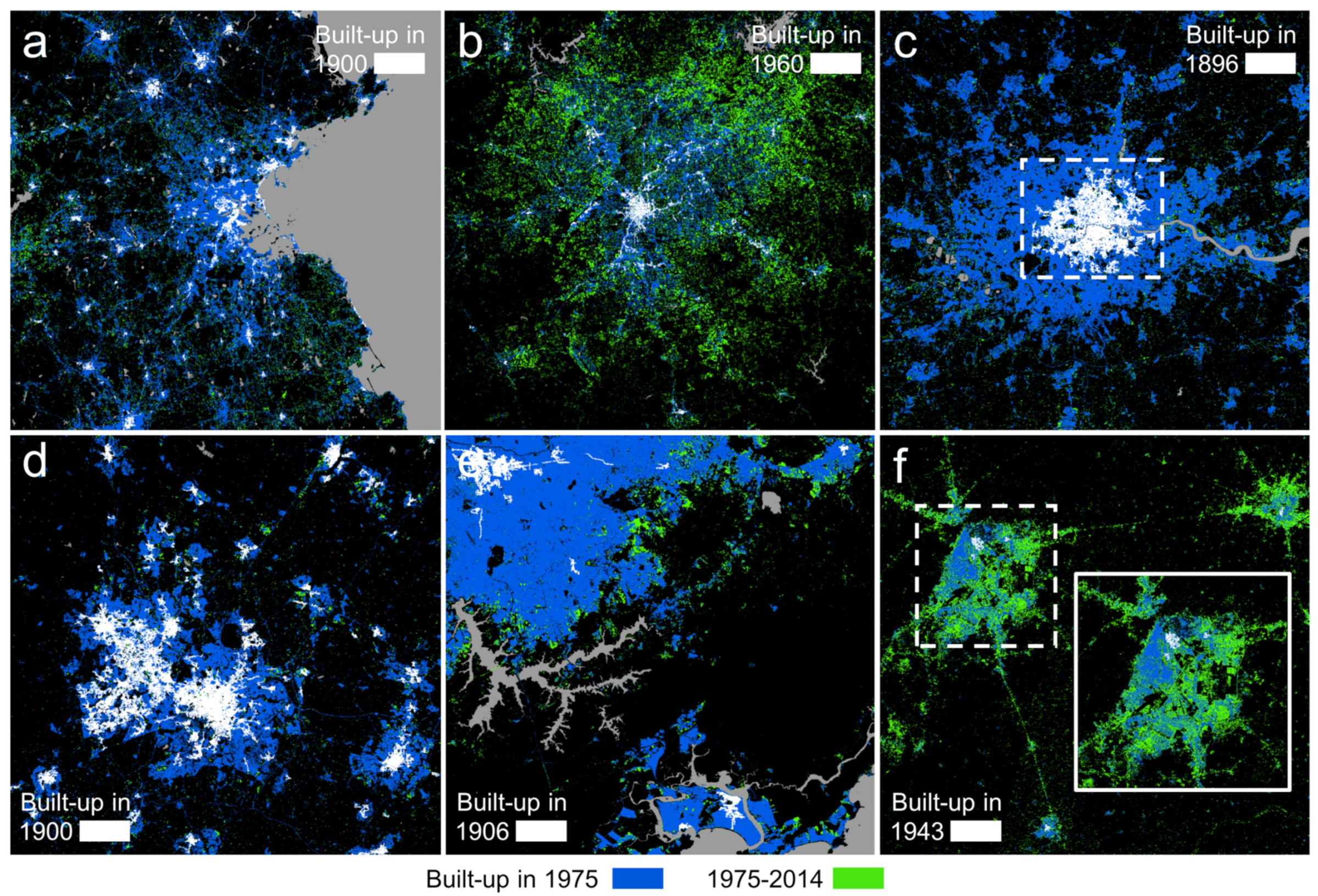
3.3. Historical Settlement Extents
3.4. Cross-Comparison to HYDE and Hind-Casted GHSL Trajectories
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A





References
- United Nations, Department of Economic and Social Affairs, Population Division. World Urbanization Prospects: The 2018 Revision, Methodology; Working Paper No. ESA/P/WP.252; United Nations: New York, NY, USA, 2018; Available online: https://www.un.org/development/desa/pd/content/world-urbanization-prospects-2018-methodology (accessed on 10 September 2021).
- Balk, D.; Leyk, S.; Jones, B.; Montgomery, M.R.; Clark, A. Understanding urbanization: A study of census and satellite-derived urban classes in the United States, 1990–2010. PLoS ONE 2018, 13, e0208487. [Google Scholar] [CrossRef]
- Ehrlich, D.; Melchiorri, M.; Florczyk, A.J.; Pesaresi, M.; Kemper, T.; Corbane, C.; Freire, S.; Schiavina, M.; Siragusa, A. Remote Sensing Derived Built-Up Area and Population Density to Quantify Global Exposure to Five Natural Hazards over Time. Remote Sens. 2018, 10, 1378. [Google Scholar] [CrossRef]
- Schneider, A.; Woodcock, C.E. Compact, Dispersed, Fragmented, Extensive? A Comparison of Urban Growth in Twenty-five Global Cities using Remotely Sensed Data, Pattern Metrics and Census Information. Urban Stud. 2008, 45, 659–692. [Google Scholar] [CrossRef]
- Gao, J.; O’Neill, B.C. Mapping global urban land for the 21st century with data-driven simulations and Shared Socioeconomic Pathways. Nat. Commun. 2020, 11, 2302. [Google Scholar] [CrossRef] [PubMed]
- Goldewijk, K.K.; Beusen, A.; Doelman, J.; Stehfest, E. Anthropogenic land use estimates for the Holocene–HYDE 3.2. Earth Syst. Sci. Data 2017, 9, 927–953. [Google Scholar] [CrossRef]
- Sohl, T.; Reker, R.; Bouchard, M.; Sayler, K.; Dornbierer, J.; Wika, S.; Quenzer, R.; Friesz, A. Modeled historical land use and land cover for the conterminous United States. J. Land Use Sci. 2016, 11, 476–499. [Google Scholar] [CrossRef]
- Uhl, J.H.; Connor, D.S.; Leyk, S.; Braswell, A.E. A century of decoupling size and structure of urban spaces in the United States. Commun. Earth Environ. 2021, 2, 1–14. [Google Scholar] [CrossRef]
- Leyk, S.; Uhl, J.H. HISDAC-US, historical settlement data compilation for the conterminous United States over 200 years. Sci. Data 2018, 5, 180175. [Google Scholar] [CrossRef]
- Leyk, S.; Uhl, J.H.; Connor, D.S.; Braswell, A.E.; Mietkiewicz, N.; Balch, J.K.; Gutmann, M. Two centuries of settlement and urban development in the United States. Sci. Adv. 2020, 6, eaba2937. [Google Scholar] [CrossRef]
- Dornbierer, J.; Wika, S.; Robison, C.; Rouze, G.; Sohl, T. Prototyping a Methodology for Long-Term (1680–2100) Historical-to-Future Landscape Modeling for the Conterminous United States. Land 2021, 10, 536. [Google Scholar] [CrossRef]
- Kane, K.; Tuccillo, J.; York, A.M.; Gentile, L.; Ouyang, Y. A spatio-temporal view of historical growth in Phoenix, Arizona, USA. Landsc. Urban Plan. 2014, 121, 70–80. [Google Scholar] [CrossRef]
- Hecht, R.; Herold, H.; Behnisch, M.; Jehling, M. Mapping Long-Term Dynamics of Population and Dwellings Based on a Multi-Temporal Analysis of Urban Morphologies. ISPRS Int. J. Geo-Inf. 2018, 8, 2. [Google Scholar] [CrossRef]
- Dietzel, C.; Herold, M.; Hemphill, J.J.; Clarke, K.C. Spatio-temporal dynamics in California’s Central Valley: Empirical links to urban theory. Int. J. Geogr. Inf. Sci. 2005, 19, 175–195. [Google Scholar] [CrossRef]
- Ostafin, K.; Kaim, D.; Siwek, T.; Miklar, A. Historical dataset of administrative units with social-economic attributes for Austrian Silesia 1837–1910. Sci. Data 2020, 7, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Kaim, D.; Szwagrzyk, M.; Dobosz, M.; Troll, M.; Ostafin, K. Mid-19th-century building structure locations in Galicia and Austrian Silesia under the Habsburg Monarchy. Earth Syst. Sci. Data 2021, 13, 1693–1709. [Google Scholar] [CrossRef]
- Fishburn, K.A.; Davis, L.R.; Allord, G.J. Scanning and Georeferencing Historical USGS Quadrangles; No. 2017-3048; US Geological Survey: Reston, VA, USA, 2017. [CrossRef]
- Burt, J.E.; White, J.; Allord, G.; Then, K.M.; Zhu, A.-X. Automated and semi-automated map georeferencing. Cartogr. Geogr. Inf. Sci. 2019, 47, 46–66. [Google Scholar] [CrossRef]
- Allord, G.J.; Fishburn, K.A.; Walter, J.L. Standard for the U.S. Geological Survey Historical Topographic Map Collection; US Geological Survey: Reston, VA, USA, 2014; Volume 3. [CrossRef]
- Sanborn Maps. Available online: https://www.loc.gov/collections/sanborn-maps/ (accessed on 1 January 2020).
- Ordnance Survey Maps. Available online: https://maps.nls.uk/os/ (accessed on 1 January 2020).
- A Journey Through Time—Maps. Available online: https://www.swisstopo.admin.ch/en/maps-data-online/maps-geodata-online/journey-through-time.html (accessed on 1 January 2020).
- Stanford University Library–David Rumsey Map Center: David Rumsey Map Collection. Available online: https://www.davidrumsey.com (accessed on 1 January 2020).
- Biszak, E.; Biszak, S.; Timár, G.; Nagy, D.; Molnár, G. Historical topographic and cadastral maps of Europe in spotlight–Evolution of the MAPIRE map portal. In Proceedings of the 12th ICA Conference Digital Approaches to Cartographic Heritage, Venice, Italy, 26–28 April 2017; pp. 204–208. [Google Scholar]
- Old Maps Online. Available online: www.oldmapsonline.org (accessed on 1 June 2020).
- Pahar—The Mountains of Central Asia Digital Dataset. Available online: http://pahar.in (accessed on 1 June 2020).
- USGS TopoTiler. Available online: https://github.com/kylebarron/usgs-topo-tiler (accessed on 1 June 2020).
- Liu, T.; Xu, P.; Zhang, S. A review of recent advances in scanned topographic map processing. Neurocomputing 2018, 328, 75–87. [Google Scholar] [CrossRef]
- Uhl, J.H.; Duan, W. Automating Information Extraction from Large Historical Topographic Map Archives: New Opportunities and Challenges. In Handbook of Big Geospatial Data; Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Chiang, Y.-Y.; Leyk, S.; Knoblock, C.A. A Survey of Digital Map Processing Techniques. ACM Comput. Surv. 2014, 47, 1–44. [Google Scholar] [CrossRef]
- Chiang, Y.-Y.; Duan, W.; Leyk, S.; Uhl, J.H.; Knoblock, C.A. Using Historical Maps in Scientific Studies. In Applications, Challenges, and Best Practices; Springer: Berlin, Germany, 2020. [Google Scholar] [CrossRef]
- Uhl, J.H.; Leyk, S.; Chiang, Y.-Y.; Duan, W.; Knoblock, C.A. Map Archive Mining: Visual-Analytical Approaches to Explore Large Historical Map Collections. ISPRS Int. J. Geo-Inf. 2018, 7, 148. [Google Scholar] [CrossRef] [PubMed]
- Hosseini, K.; McDonough, K.; van Strien, D.; Vane, O.; Wilson, D.C.S. Maps of a Nation? The Digitized Ordnance Survey for New Historical Research. J. Vic. Cult. 2021, 26, 284–299. [Google Scholar] [CrossRef]
- Petitpierre, R. Neural networks for semantic segmentation of historical city maps: Cross-cultural performance and the impact of figurative diversity. arXiv 2021, arXiv:2101.12478. [Google Scholar]
- Zhou, X.; Li, W.; Arundel, T.S.; Liu, J. Deep convolutional neural networks for map-type classification. arXiv 2021, arXiv:1805.10402. [Google Scholar]
- Barvir, R.; Vozenilek, V. Developing Versatile Graphic Map Load Metrics. ISPRS Int. J. Geo-Inf. 2020, 9, 705. [Google Scholar] [CrossRef]
- Schnürer, R.; Sieber, R.; Schmid-Lanter, J.; Öztireli, A.C.; Hurni, L. Detection of Pictorial Map Objects with Convolutional Neural Networks. Cartogr. J. 2020, 58, 50–68. [Google Scholar] [CrossRef]
- Howe, N.R.; Weinman, J.; Gouwar, J.; Shamji, A. Deformable Part Models for Automatically Georeferencing Historical Map Images. In Proceedings of the 27th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Chicago, IL, USA, 5–8 November 2019. [Google Scholar] [CrossRef]
- Luft, J. Automatic Georeferencing of Historical Maps by Geocoding. In Proceedings of the International Workshop on Automatic Vectorisation of Historical Maps, Budapest, Hungary, 13 March 2020. [Google Scholar] [CrossRef]
- Tavakkol, S.; Chiang, Y.-Y.; Waters, T.; Han, F.; Prasad, K.; Kiveris, R. Kartta Labs. In Proceedings of the 3rd ACM SIGSPATIAL International Workshop on AI for Geographic Knowledge Discovery, Chigago, IL, USA, 5 November 2019; pp. 48–51. [Google Scholar] [CrossRef]
- Sun, K.; Hu, Y.; Song, J.; Zhu, Y. Aligning geographic entities from historical maps for building knowledge graphs. Int. J. Geogr. Inf. Sci. 2020, 35, 1–30. [Google Scholar] [CrossRef]
- Duan, W.; Chiang, Y.-Y.; Knoblock, C.A.; Jain, V.; Feldman, D.; Uhl, J.H.; Leyk, S. Automatic alignment of geographic features in contemporary vector data and historical maps. In Proceedings of the 1st Workshop on Artificial Intelligence And Deep Learning For Geographic Knowledge Discovery 2017, Loa Angeles, CA, USA, 7–10 November 2017; pp. 45–54. [Google Scholar] [CrossRef]
- Weinman, J.; Chen, Z.; Gafford, B.; Gifford, N.; Lamsal, A.; Niehus-Staab, L. Deep Neural Networks for Text Detection and Recognition in Historical Maps. In Proceedings of the 2019 International Conference on Document Analysis and Recognition (ICDAR), Sydney, Australia, 20–25 September 2019; pp. 902–909. [Google Scholar] [CrossRef]
- Schlegel, I. Automated Extraction of Labels from Large-Scale Historical Maps. AGILE GIScience Ser. 2021, 2, 1–14. [Google Scholar] [CrossRef]
- Li, Z.; Chiang, Y.-Y.; Tavakkol, S.; Shbita, B.; Uhl, J.H.; Leyk, S.; Knoblock, C.A. An Automatic Approach for Generating Rich, Linked Geo-Metadata from Historical Map Images. In Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Singapore, 10 January 2020. [Google Scholar] [CrossRef]
- Herrault, P.-A.; Sheeren, D.; Fauvel, M.; Paegelow, M. Automatic Extraction of Forests from Historical Maps Based on Unsupervised Classification in the CIELab Color Space. In Geographic Information Science at the Heart of Europe; Springer: Cham, Switzerland, 2013; pp. 95–112. [Google Scholar] [CrossRef]
- Chiang, Y.-Y.; Duan, W.; Leyk, S.; Uhl, J.H.; Knoblock, C.A. Training Deep Learning Models for Geographic Feature Recognition from Historical Maps. In Using Historical Maps in Scientific Studies; Springer: Cham, Switzerland, 2019; pp. 65–98. [Google Scholar] [CrossRef]
- Saeedimoghaddam, M.; Stepinski, T.F. Automatic extraction of road intersection points from USGS historical map series using deep convolutional neural networks. Int. J. Geogr. Inf. Sci. 2019, 34, 947–968. [Google Scholar] [CrossRef]
- Henderson, T.C.; Linton, T. Raster Map Image Analysis. In Proceedings of the 10th international conference on document analysis and recognition, Barcelona, Spain, 26–29 July 2009; pp. 376–380. [Google Scholar] [CrossRef]
- Can, Y.S.; Gerrits, P.J.; Kabadayi, M.E. Automatic Detection of Road Types From the Third Military Mapping Survey of Austria-Hungary Historical Map Series With Deep Convolutional Neural Networks. IEEE Access 2021, 9, 62847–62856. [Google Scholar] [CrossRef]
- Garcia-Molsosa, A.; Orengo, H.A.; Lawrence, D.; Philip, G.; Hopper, K.; Petrie, C.A. Potential of deep learning segmentation for the extraction of archaeological features from historical map series. Archaeol. Prospect. 2021, 28, 187–199. [Google Scholar] [CrossRef]
- Maxwell, A.; Bester, M.; Guillen, L.; Ramezan, C.; Carpinello, D.; Fan, Y.; Hartley, F.; Maynard, S.; Pyron, J. Semantic Segmentation Deep Learning for Extracting Surface Mine Extents from Historic Topographic Maps. Remote Sens. 2020, 12, 4145. [Google Scholar] [CrossRef]
- Ares Oliveira, S.; di Lenardo, I.; Kaplan, F. Machine Vision algorithms on cadaster plans. In Proceedings of the Premiere Annual Conference of the International Alliance of Digital Humanities Organizations, Montreal, ON, Canada, 8–11 August 2017. [Google Scholar]
- Ares Oliveira, S.; di Lenardo, I.; Tourenc, B.; Kaplan, F. A deep learning approach to Cadastral Computing. In Proceedings of the Digital Humanities Conference, Utrecht, The Netherlands, 9–12 July 2019. [Google Scholar]
- Jiao, C.; Heitzler, M.; Hurni, L. Extracting Wetlands from Swiss Historical Maps with Convolutional Neural Networks. In Proceedings of the Automatic Vectorisation of Historical Maps. International workshop organized by the ICA Commission on Cartographic Heritage into the Digital, Budapest, Hungary, 13 March 2020. [Google Scholar]
- García, J.H.; Dunesme, S.; Piégay, H. Can we characterize river corridor evolution at a continental scale from historical topographic maps? A first assessment from the comparison of four countries. River Res. Appl. 2019, 36, 934–946. [Google Scholar] [CrossRef]
- Miao, Q.; Liu, T.; Song, J.; Gong, M.; Yang, Y. Guided Superpixel Method for Topographic Map Processing. IEEE Trans. Geosci. Remote. Sens. 2016, 54, 6265–6279. [Google Scholar] [CrossRef]
- Levin, G.; Groom, G.B.; Svenningsen, S.R.; Linnet Perner, M. Automated Production of Spatial Datasets For Land Categories From Historical Maps. Method Development and Results For A Pilot Study of Danish Late-1800s Topographical Maps; Scientific Report from DCE–Danish Centre for Environment and Energy No. 389; Aarhus University, DCE–Danish Centre for Environment and Energy: Aarhus, Denmark, 2020. [Google Scholar]
- Heitzler, M.; Hurni, L. Cartographic reconstruction of building footprints from historical maps: A study on the Swiss Siegfried map. Trans. GIS 2020, 24, 442–461. [Google Scholar] [CrossRef]
- Laycock, S.; Brown, P.; Laycock, R.; Day, A. Aligning archive maps and extracting footprints for analysis of historic urban environments. Comput. Graph. 2011, 35, 242–249. [Google Scholar] [CrossRef][Green Version]
- Uhl, J.H.; Leyk, S.; Chiang, Y.-Y.; Duan, W.; Knoblock, C.A. Automated Extraction of Human Settlement Patterns From Historical Topographic Map Series Using Weakly Supervised Convolutional Neural Networks. IEEE Access 2019, 8, 6978–6996. [Google Scholar] [CrossRef]
- Uhl, J.H.; Leyk, S.; Chiang, Y.; Duan, W.; Knoblock, C.A. Spatialising uncertainty in image segmentation using weakly supervised convolutional neural networks: A case study from historical map processing. IET Image Process. 2018, 12, 2084–2091. [Google Scholar] [CrossRef]
- Uhl, J.; Leyk, S.; Chiang, Y.-Y.; Duan, W.; Knoblock, C. Extracting Human Settlement Footprint from Historical Topographic Map Series Using Context-Based Machine Learning. In Proceedings of the 8th International Conference of Pattern Recognition Systems (ICPRS 2017), Madrid, Spain, 11–13 July 2017. [Google Scholar] [CrossRef]
- Liu, T.; Miao, Q.; Xu, P.; Zhang, S. Superpixel-Based Shallow Convolutional Neural Network (SSCNN) for Scanned Topographic Map Segmentation. Remote Sens. 2020, 12, 3421. [Google Scholar] [CrossRef]
- Chen, Y.; Carlinet, E.; Chazalon, J.; Mallet, C.; Duménieu, B.; Perret, J. Vectorization of Historical Maps Using Deep Edge Filtering and Closed Shape Extraction. In International Conference on Document Analysis and Recognition; Springer: Cham, Switzerland, 2021; pp. 510–525. [Google Scholar] [CrossRef]
- Li, Z. Generating Historical Maps from Online Maps. In Proceedings of the 27th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Chicago, IL, USA, 5–8 November 2019. [Google Scholar] [CrossRef]
- Kang, Y.; Gao, S.; Roth, R.E. Transferring multiscale map styles using generative adversarial networks. Int. J. Cartogr. 2019, 5, 115–141. [Google Scholar] [CrossRef]
- Andrade, H.J.A.; Fernandes, B.J.T. Synthesis of Satellite-Like Urban Images From Historical Maps Using Conditional GAN. IEEE Geosci. Remote. Sens. Lett. 2020, 1–4. [Google Scholar] [CrossRef]
- Corbane, C.; Pesaresi, M.; Kemper, T.; Politis, P.; Florczyk, A.J.; Syrris, V.; Melchiorri, M.; Sabo, F.; Soille, P. Automated global delineation of human settlements from 40 years of Landsat satellite data archives. Big Earth Data 2019, 3, 140–169. [Google Scholar] [CrossRef]
- Corbane, C.; Florczyk, A.; Pesaresi, M.; Politis, P.; Syrris, V. GHS Built-Up Grid, Derived From Landsat, Multitemporal (1975-1990-2000-2014), R2018A; European Commission, Joint Research Centre (JRC): Brusseles, Belgium, 2018. [Google Scholar] [CrossRef]
- Haslauer, E.; Biberacher, M.; Blaschke, T. GIS-based Backcasting: An innovative method for parameterisation of sustainable spatial planning and resource management. Futures 2012, 44, 292–302. [Google Scholar] [CrossRef]
- Anderson, M.P.; Woessner, W.W.; Hunt, R.J. Applied Groundwater Modeling: Simulation of Flow and Advective Transport; Academic Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Leyk, S.; Uhl, J.H.; Balk, D.; Jones, B. Assessing the accuracy of multi-temporal built-up land layers across rural-urban trajectories in the United States. Remote Sens. Environ. 2017, 204, 898–917. [Google Scholar] [CrossRef] [PubMed]
- Uhl, J.H.; Leyk, S. Towards a novel backdating strategy for creating built-up land time series data using contemporary spatial constraints. Remote Sens. Environ. 2019, 238, 111197. [Google Scholar] [CrossRef]
- Taubenböck, H.; Esch, T.; Felbier, A.; Wiesner, M.; Roth, A.; Dech, S. Monitoring urbanization in mega cities from space. Remote Sens. Environ. 2012, 117, 162–176. [Google Scholar] [CrossRef]
- Schneider, A.; Mertes, C.M. Expansion and growth in Chinese cities, 1978–2010. Environ. Res. Lett. 2014, 9, 024008. [Google Scholar] [CrossRef]
- Li, X.; Gong, P.; Liang, L. A 30-year (1984–2013) record of annual urban dynamics of Beijing City derived from Landsat data. Remote Sens. Environ. 2015, 166, 78–90. [Google Scholar] [CrossRef]
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Schwarz, N.; Haase, D.; Seppelt, R. Omnipresent Sprawl? A Review of Urban Simulation Models with Respect to Urban Shrinkage. Environ. Plan. B Plan. Des. 2010, 37, 265–283. [Google Scholar] [CrossRef]
- Uhl, J.H.; Leyk, S.; McShane, C.M.; Braswell, A.E.; Connor, D.S.; Balk, D. Fine-grained, spatiotemporal datasets measuring 200 years of land development in the United States. Earth Syst. Sci. Data 2021, 13, 119–153. [Google Scholar] [CrossRef]
- USGS Historical Topographic Map Collection (HTMC) Data Repository. Available online: https://prd-tnm.s3.amazonaws.com/StagedProducts/Maps/HistoricalTopo/ (accessed on 30 June 2021).
- Ordnance Survey Maps—Six-inch England and Wales, 1842–1952. Available online: https://maps.nls.uk/os/6inch-england-and-wales/index.html (accessed on 30 June 2021).
- National Library of Scotland—Explore georeferenced Maps. Available online: https://maps.nls.uk/geo/explore/ (accessed on 30 June 2021).
- Digital Heritage Collection of the University Bordeaux Montaigne. Available online: http://1886.u-bordeaux-montaigne.fr/items/show/10037 (accessed on 30 June 2021).
- Library of the University of Texas at Austin. Online Topographic Map Collections. Available online: https://legacy.lib.utexas.edu/maps/topo/india_253k/txu-pclmaps-oclc-181831961-lahore-44-i-1943.jpg (accessed on 30 June 2021).
- Zillow’s Assessor and Real Estate Database (ZTRAX). Available online: https://www.zillow.com/research/ztrax/ (accessed on 1 January 2020).
- US Census Bureau. Core-based Statistical Areas 2010. Available online: https://www2.census.gov/geo/tiger/TIGER2010/CBSA/2010/ (accessed on 1 January 2020).
- Hartigan, J.A.; Wong, M.A. Algorithm AS 136: A K-Means Clustering Algorithm. J. R. Stat. Soc. Ser. C Appl. Stat. 1979, 28, 100. [Google Scholar] [CrossRef]
- Thorndike, R.L. Who belongs in the family? Psychometrika 1953, 18, 267–276. [Google Scholar] [CrossRef]
- Green, D.M.; Swets, J.A. Signal Detection Theory and Psychophysics; Wiley: New York, NY, USA, 1966; Volume 1. [Google Scholar]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognit. Lett. 2005, 27, 861–874. [Google Scholar] [CrossRef]
- Wei, X.; Widgren, M.; Li, B.; Ye, Y.; Fang, X.; Zhang, C.; Chen, T. Dataset of 1 km cropland cover from 1690 to 1999 in Scandinavia. Earth Syst. Sci. Data 2021, 13, 3035–3056. [Google Scholar] [CrossRef]
- Terrone, M.; Piana, P.; Paliaga, G.; D’Orazi, M.; Faccini, F. Coupling Historical Maps and LiDAR Data to Identify Man-Made Landforms in Urban Areas. ISPRS Int. J. Geo-Inf. 2021, 10, 349. [Google Scholar] [CrossRef]
- Basar, S.; Ali, M.; Ochoa-Ruiz, G.; Zareei, M.; Waheed, A.; Adnan, A. Unsupervised color image segmentation: A case of RGB histogram based K-means clustering initialization. PLoS ONE 2020, 15, e0240015. [Google Scholar] [CrossRef] [PubMed]
- Haindl, M.; Mikeš, S. A competition in unsupervised color image segmentation. Pattern Recognit. 2016, 57, 136–151. [Google Scholar] [CrossRef]
- Chen, T.-W.; Chen, Y.-L.; Chien, S.-Y. Fast image segmentation based on K-Means clustering with histograms in HSV color space. In Proceedings of the IEEE 10th Workshop on Multimedia Signal Processing, Queensland, Australia, 8–10 October 2008; pp. 322–325. [Google Scholar] [CrossRef]
- Bettencourt, L.M.A.; Yang, V.C.; Lobo, J.; Kempes, C.P.; Rybski, D.; Hamilton, M.J. The interpretation of urban scaling analysis in time. J. R. Soc. Interface 2020, 17, 20190846. [Google Scholar] [CrossRef]
- Tollefson, J.; Frickel, S.; Restrepo, M.I. Feature extraction and machine learning techniques for identifying historic urban environmental hazards: New methods to locate lost fossil fuel infrastructure in US cities. PLoS ONE 2021, 16, e0255507. [Google Scholar] [CrossRef]
- Rolf, E.; Proctor, J.; Carleton, T.; Bolliger, I.; Shankar, V.; Ishihara, M.; Recht, B.; Hsiang, S. A generalizable and accessible approach to machine learning with global satellite imagery. Nat. Commun. 2021, 12, 4535. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| City | Country | Map Type | Map Resolution [m] | Map Scale | Reference Year | Print Colors | Urban Built-Up Area Depiction | Data Source | Download & Compositing | Geo-Referencing |
|---|---|---|---|---|---|---|---|---|---|---|
| Atlanta | USA | Composite | 2 | 1:24,000 | 1954–1969 | 5 | Red color tone | [81] | Automated | By provider |
| Boston | USA | Composite | 5.3 | 1:62,500 | 1885–1918 | 3 | Building block | [81] | Automated | By provider |
| Birmingham | UK | Composite | 2.4 | 1:10,560 | 1888–1913 | 2 | Building block | [82] | Automated | By provider |
| London | UK | Composite | 12 | 1:63,360 | 1896 | 3 | Street block | [83] | Manual | Manual |
| Sao Paulo | Brazil | Single sheet | 9.3 | 1:100,000 | 1906 | 2 | Street block | [84] | Manual | Manual |
| Lahore | Pakistan | Single sheet | 36.7 | 1:254,440 | 1943 | 2 | Building outlines | [85] | Manual | Manual |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uhl, J.H.; Leyk, S.; Li, Z.; Duan, W.; Shbita, B.; Chiang, Y.-Y.; Knoblock, C.A. Combining Remote-Sensing-Derived Data and Historical Maps for Long-Term Back-Casting of Urban Extents. Remote Sens. 2021, 13, 3672. https://doi.org/10.3390/rs13183672
Uhl JH, Leyk S, Li Z, Duan W, Shbita B, Chiang Y-Y, Knoblock CA. Combining Remote-Sensing-Derived Data and Historical Maps for Long-Term Back-Casting of Urban Extents. Remote Sensing. 2021; 13(18):3672. https://doi.org/10.3390/rs13183672
Chicago/Turabian StyleUhl, Johannes H., Stefan Leyk, Zekun Li, Weiwei Duan, Basel Shbita, Yao-Yi Chiang, and Craig A. Knoblock. 2021. "Combining Remote-Sensing-Derived Data and Historical Maps for Long-Term Back-Casting of Urban Extents" Remote Sensing 13, no. 18: 3672. https://doi.org/10.3390/rs13183672
APA StyleUhl, J. H., Leyk, S., Li, Z., Duan, W., Shbita, B., Chiang, Y.-Y., & Knoblock, C. A. (2021). Combining Remote-Sensing-Derived Data and Historical Maps for Long-Term Back-Casting of Urban Extents. Remote Sensing, 13(18), 3672. https://doi.org/10.3390/rs13183672