
Towards High-Resolution Land-Cover Classification of Greenland: A Case Study Covering Kobbefjord, Disko and Zackenberg


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Sites
2.2. Data
2.2.1. Sentinel-2
2.2.2. Digital Elevation Model
2.2.3. Ground Reference Data
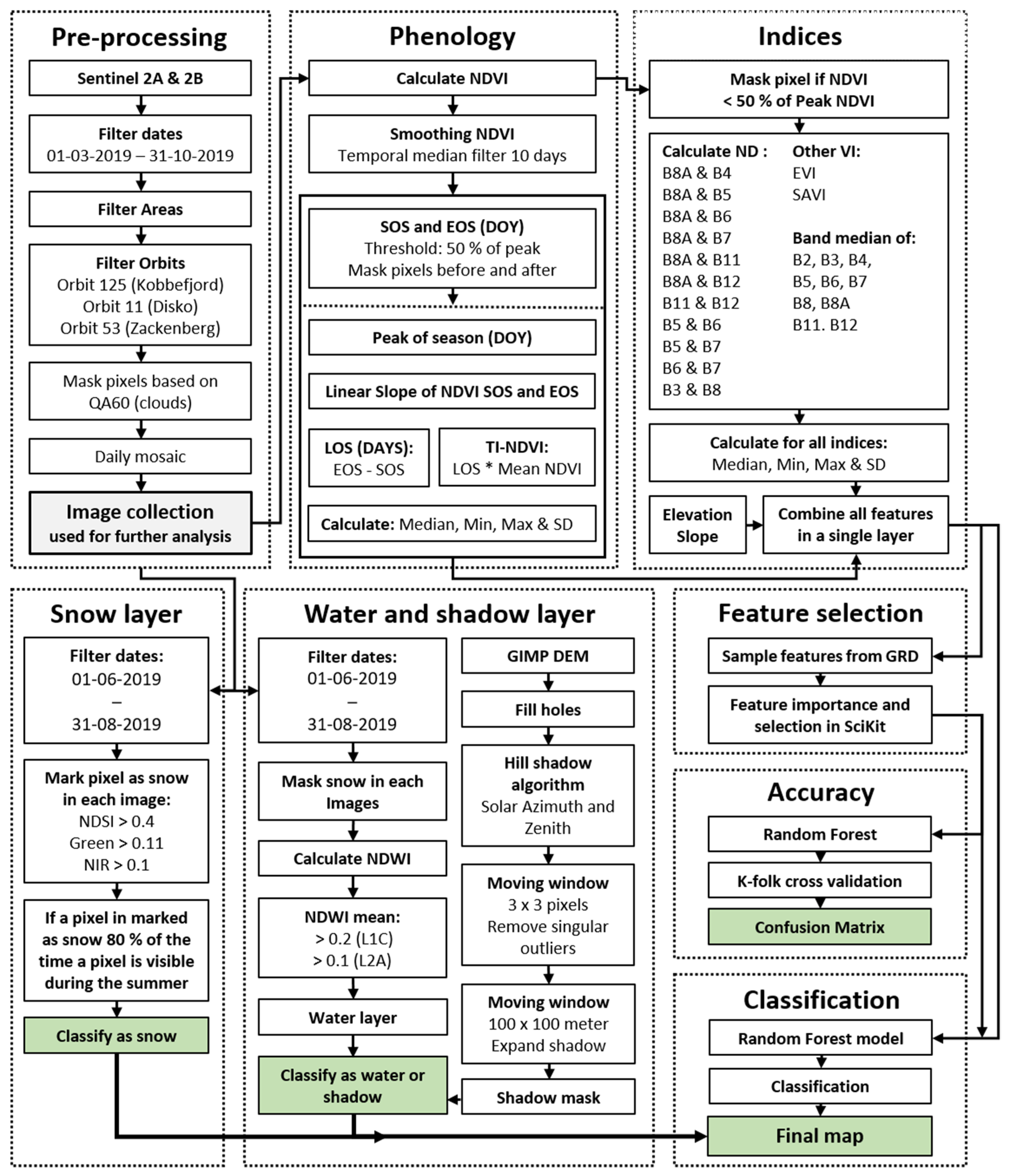
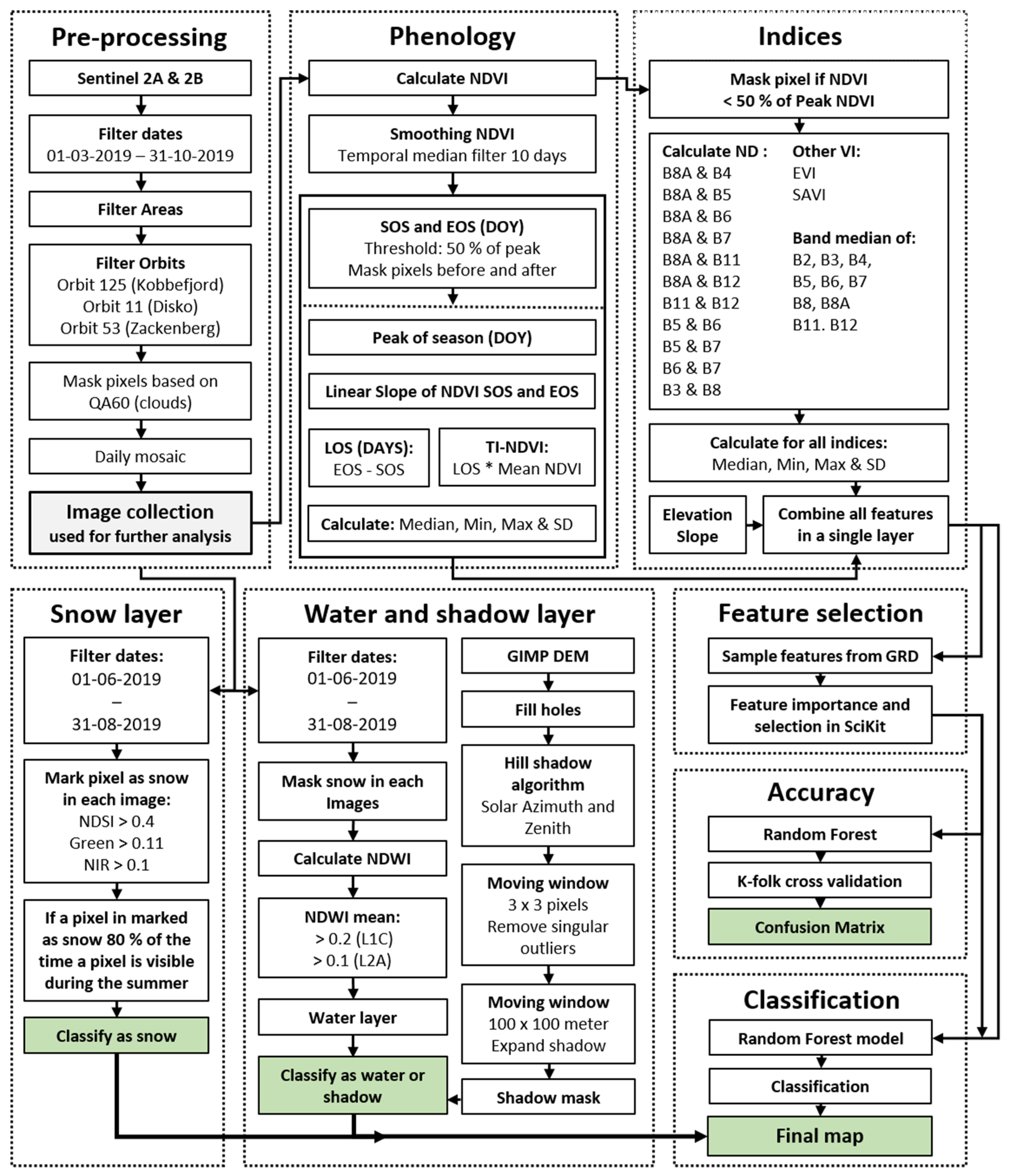
2.3. Classification Workflow
2.3.1. Preprocessing and Masking for Snow, Water and Shadows
2.3.2. Phenology Metric Extraction
2.3.3. Spectral Indices and Topography Derivate
2.3.4. Vegetation Classification and Validation
3. Results
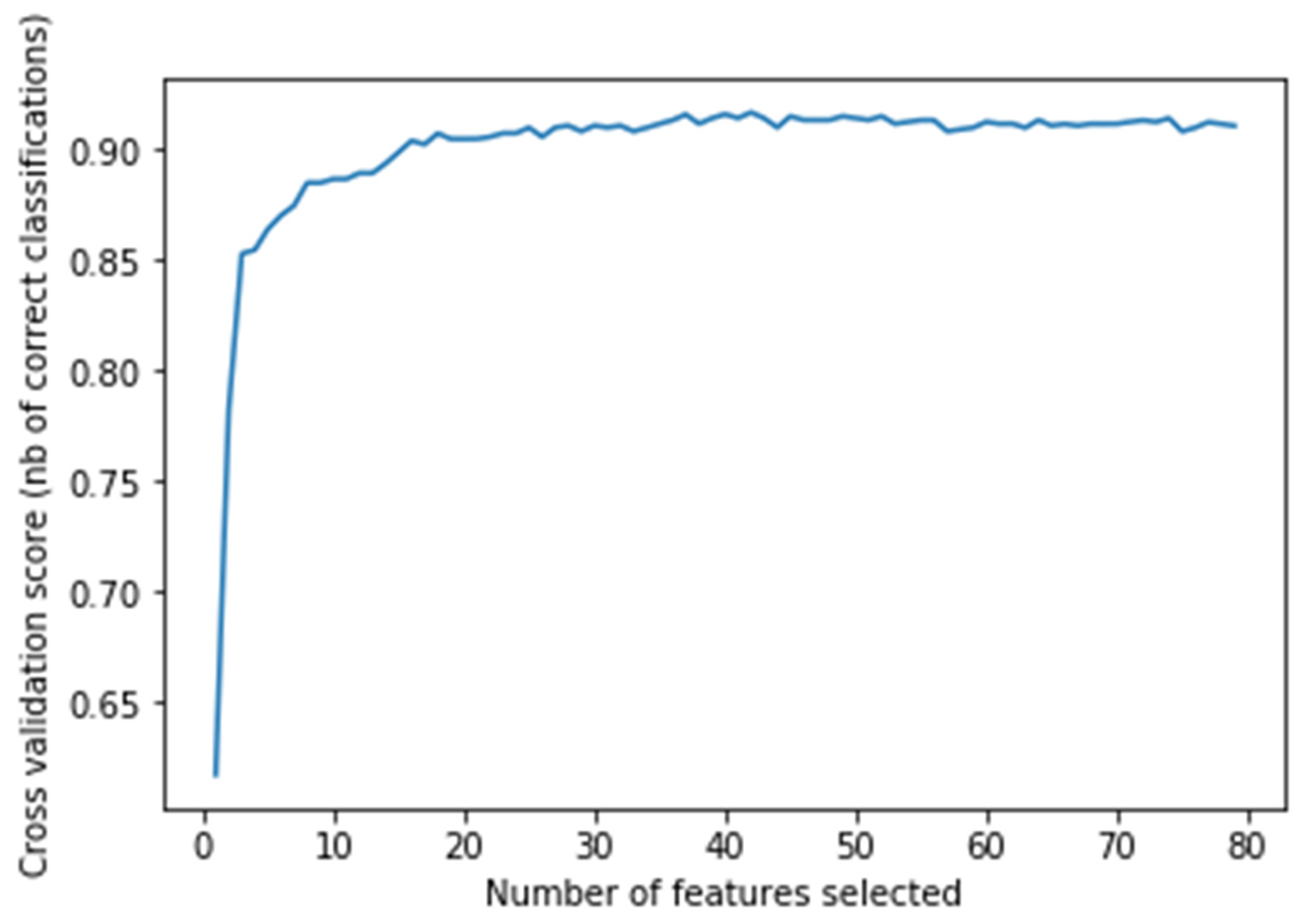
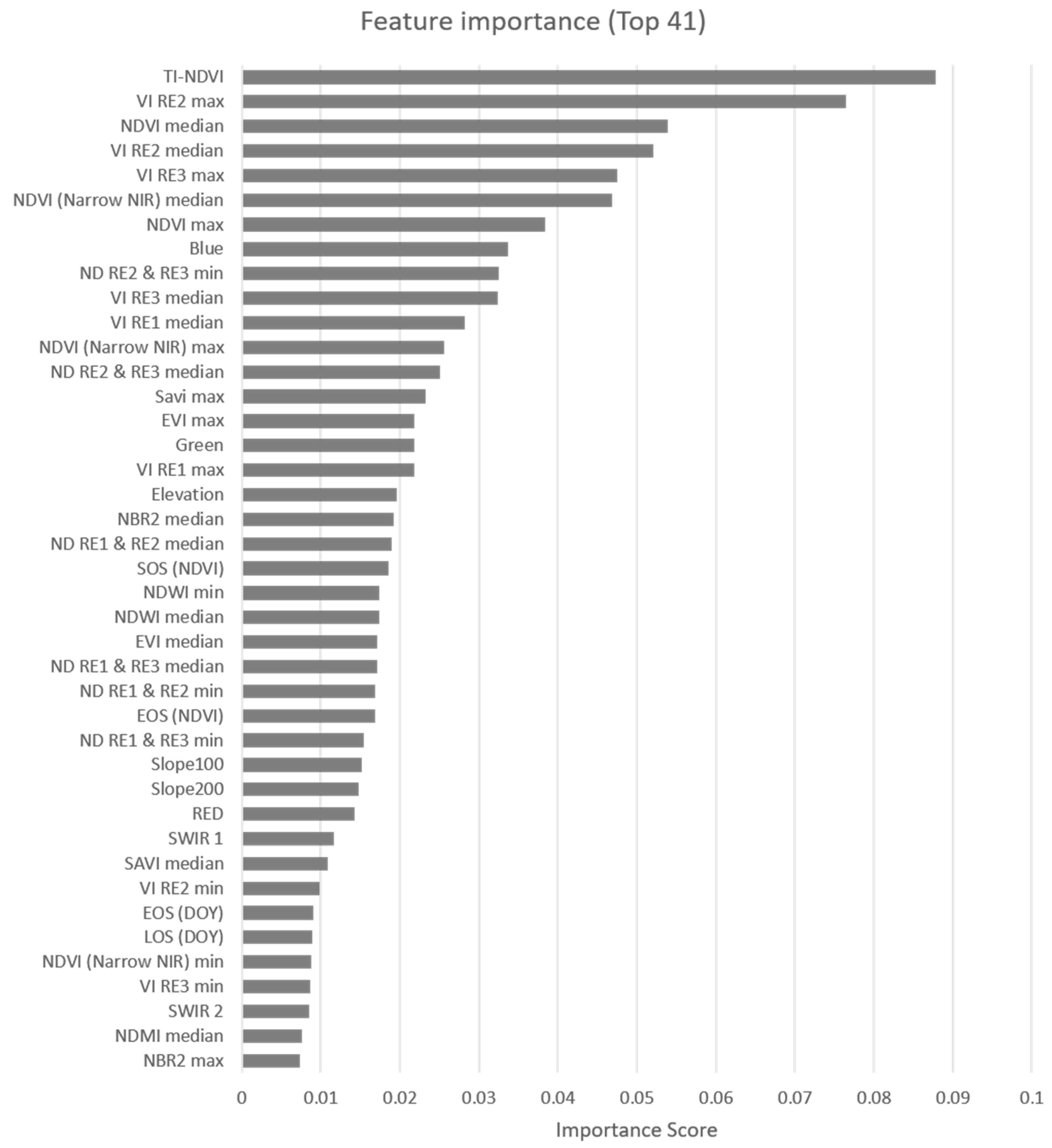
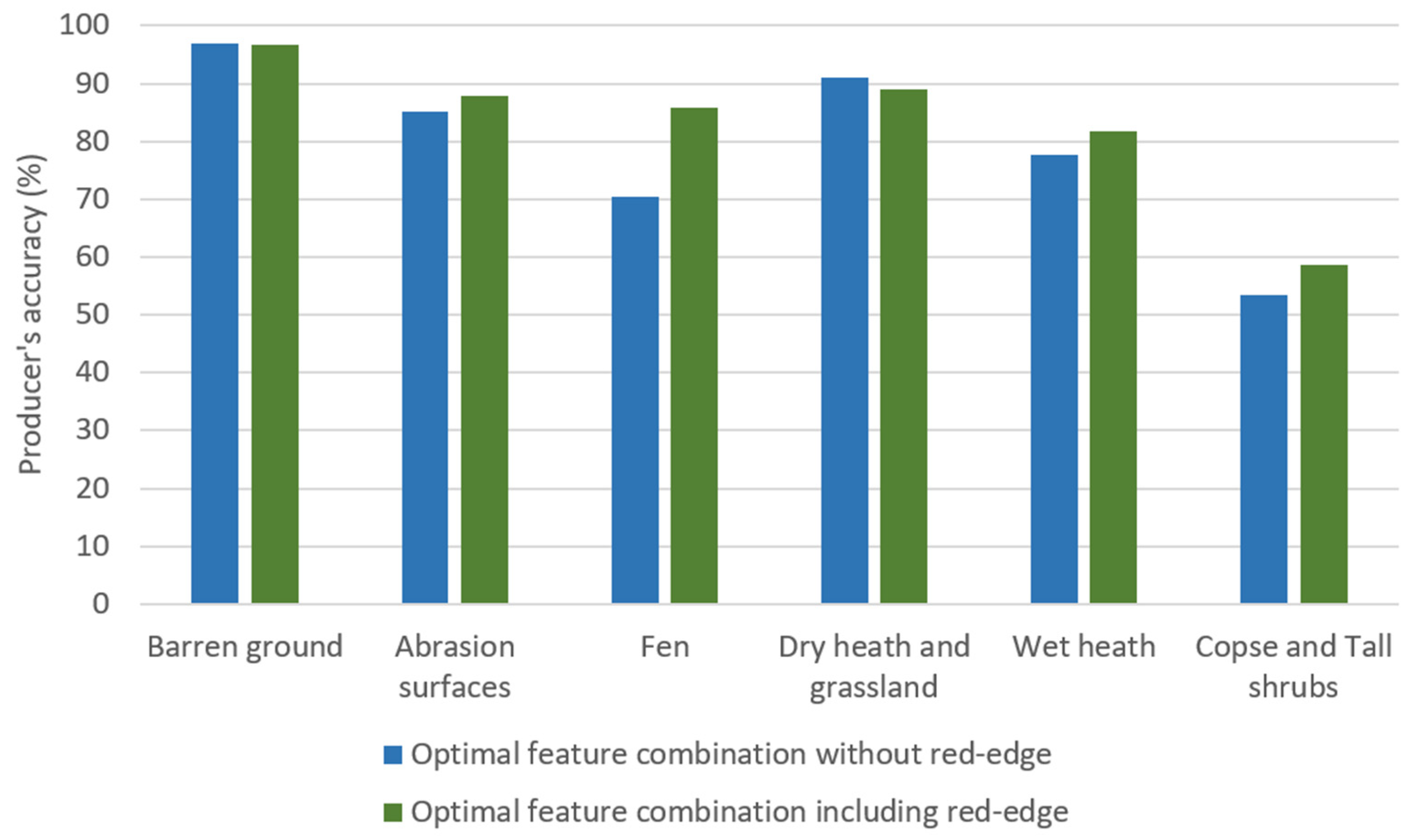
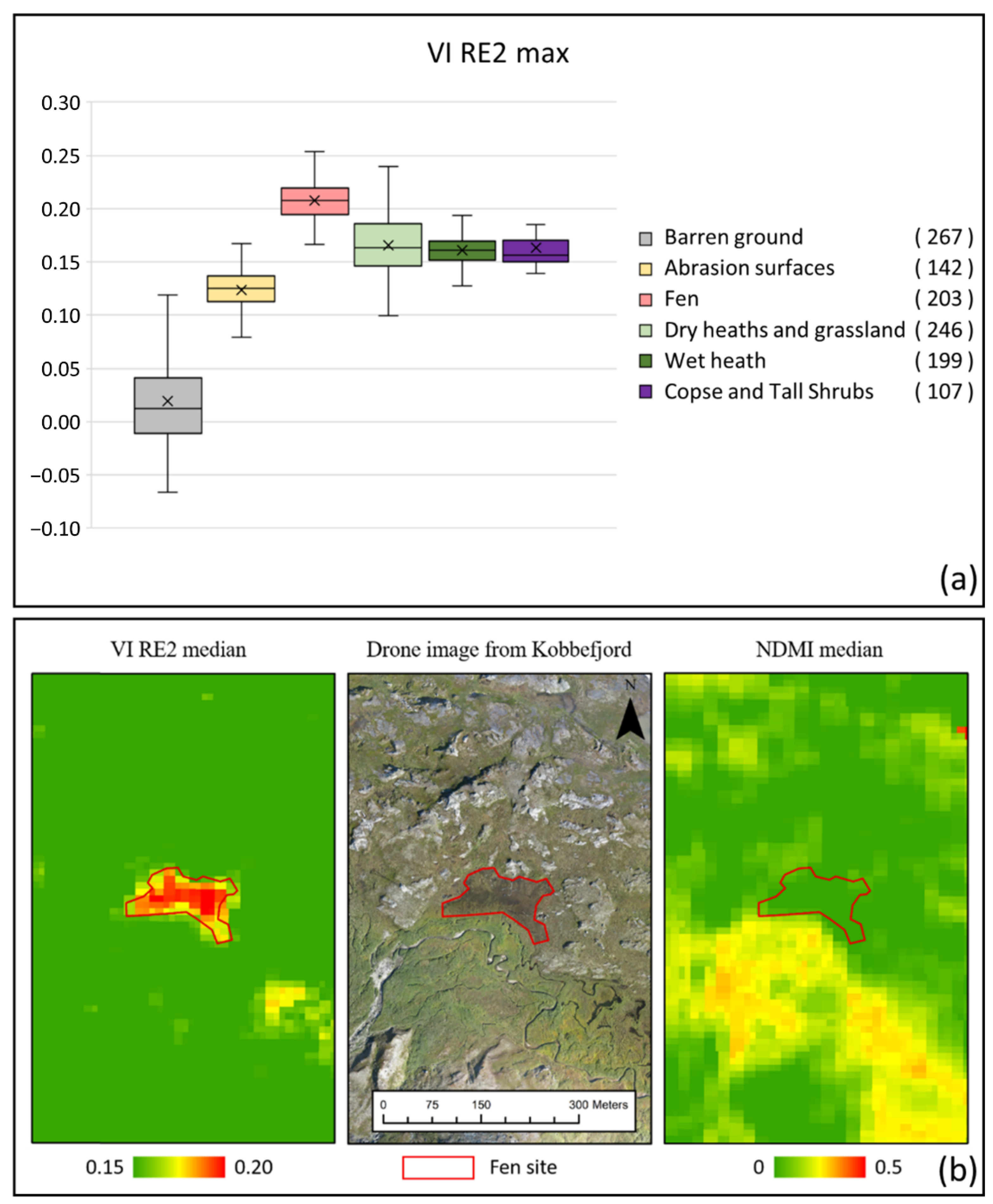
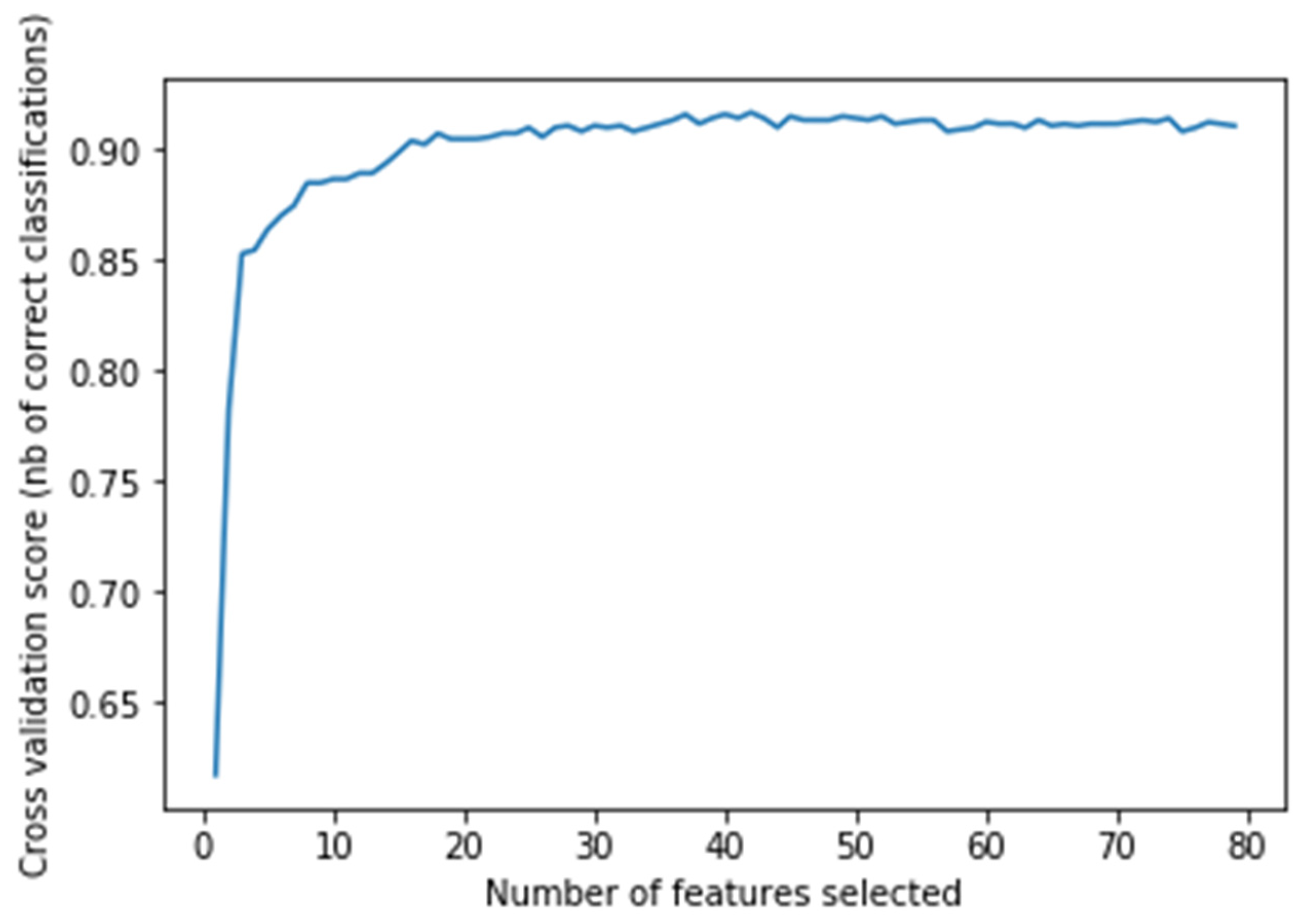
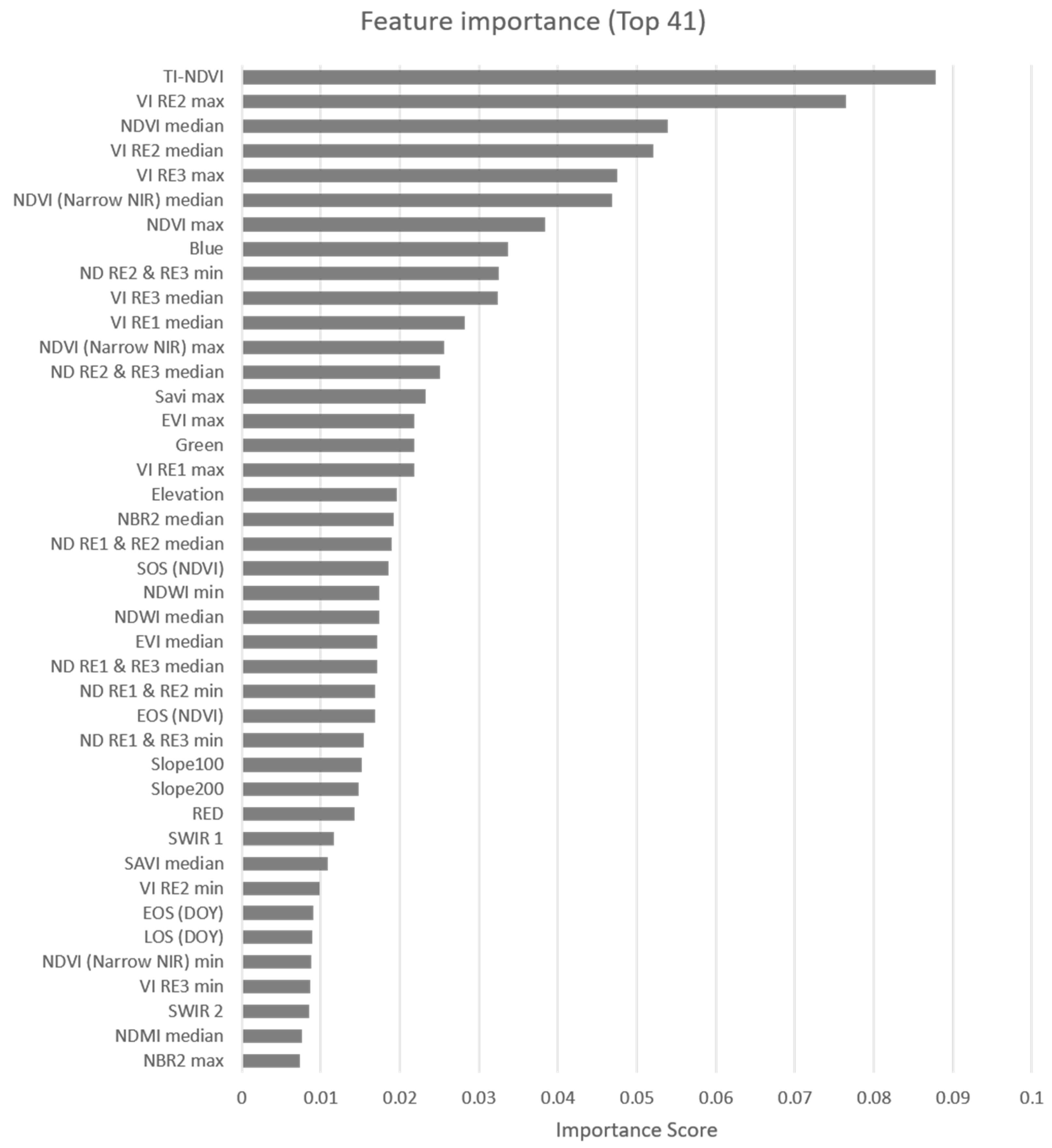
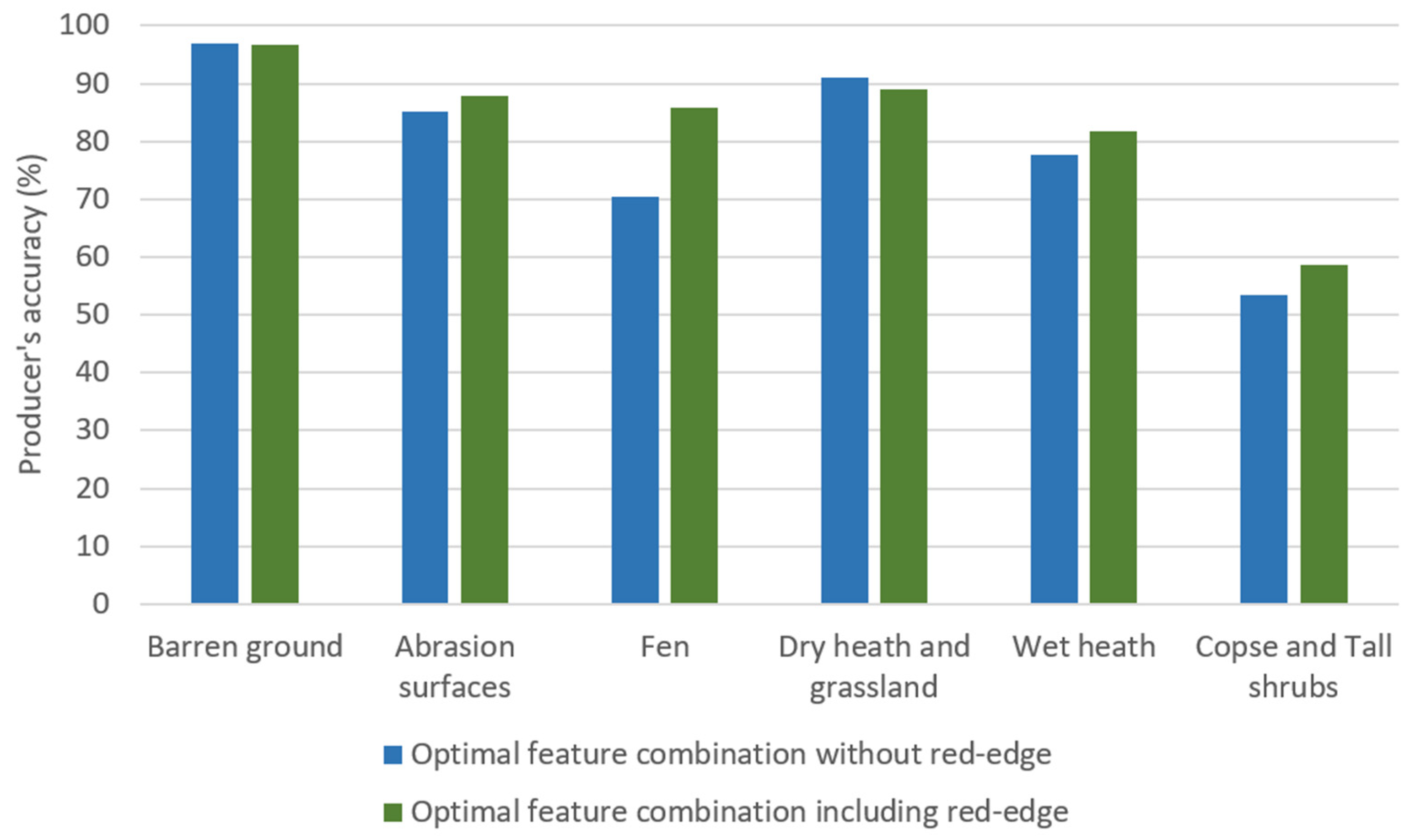
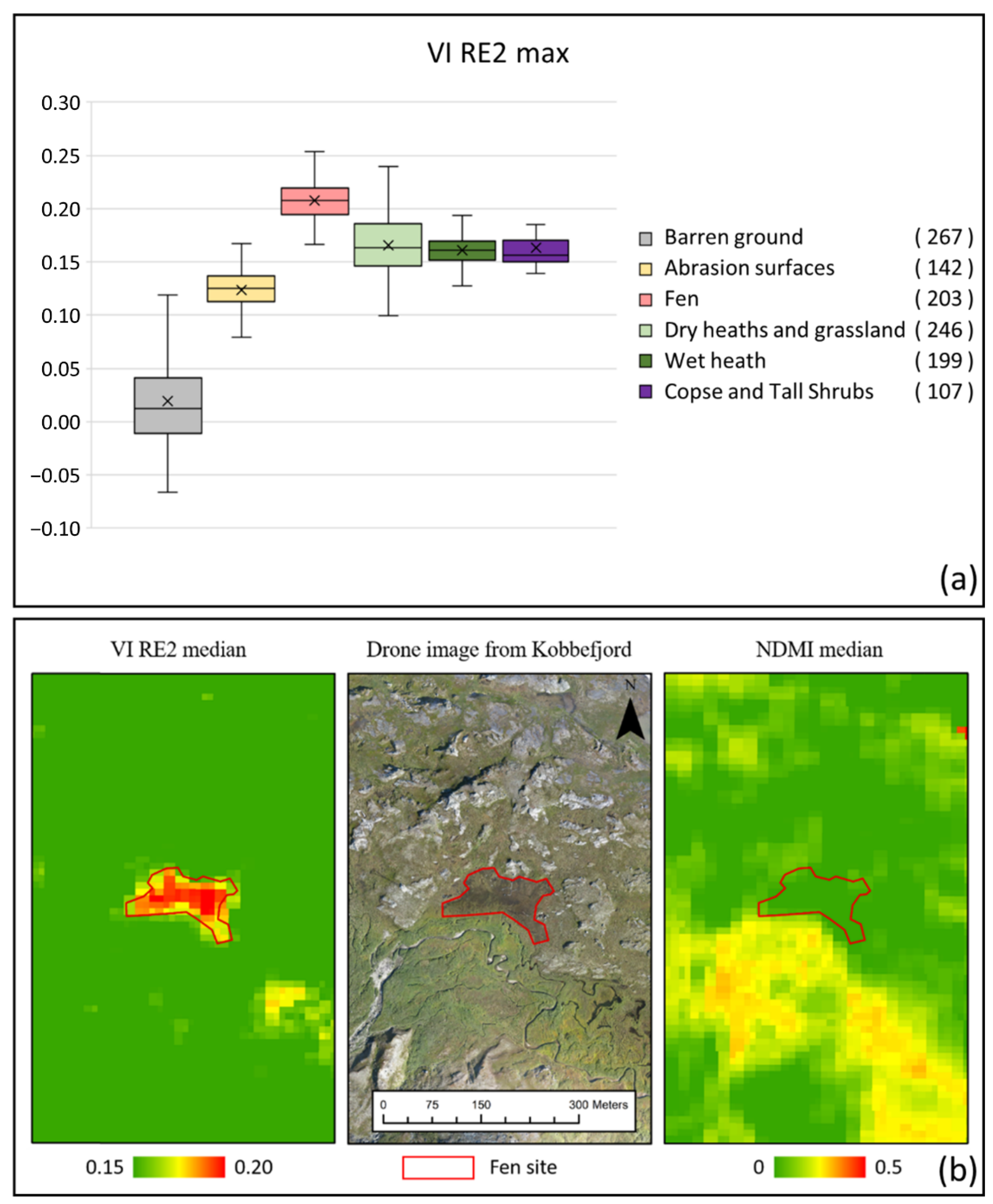
3.1. Feature Importance
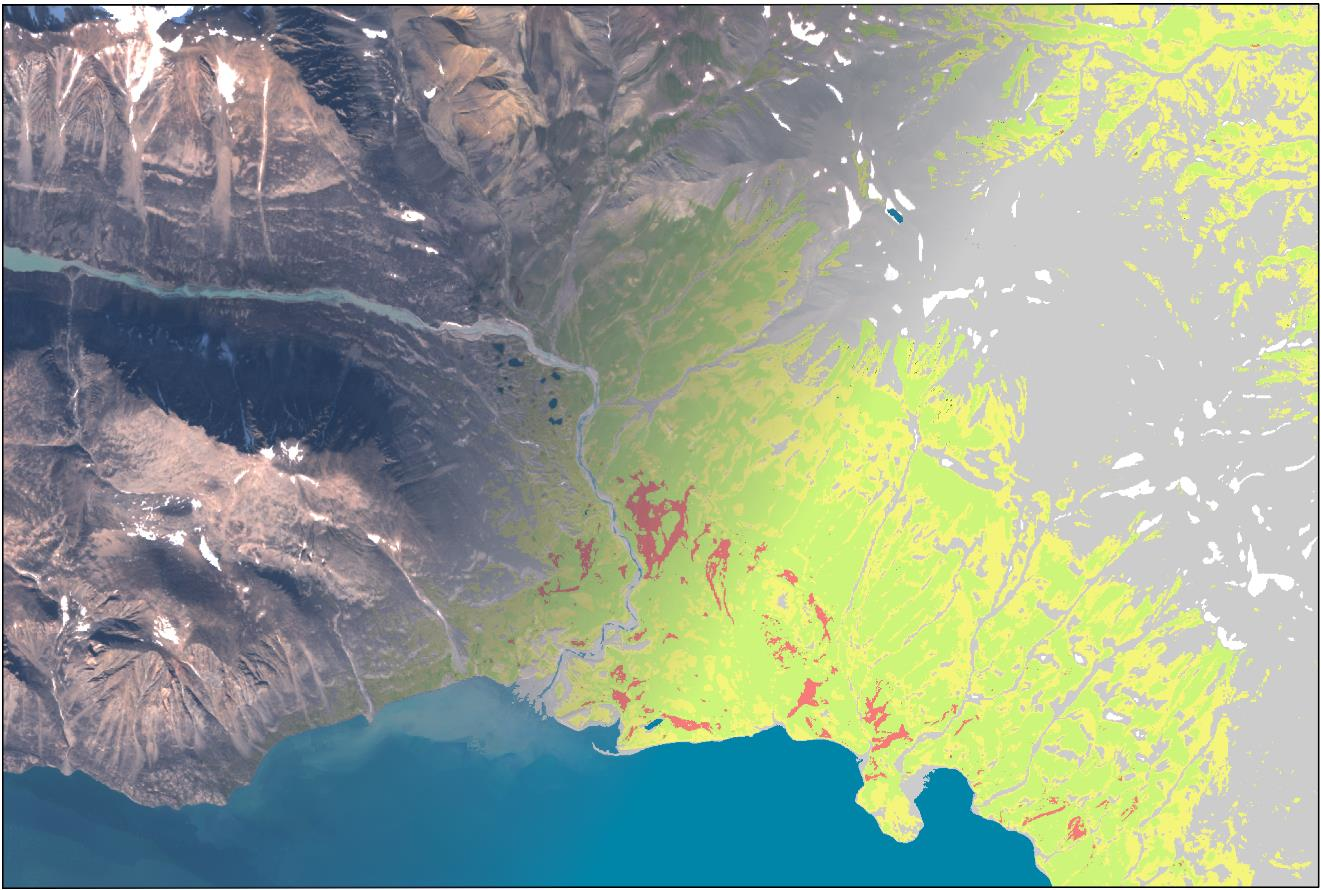
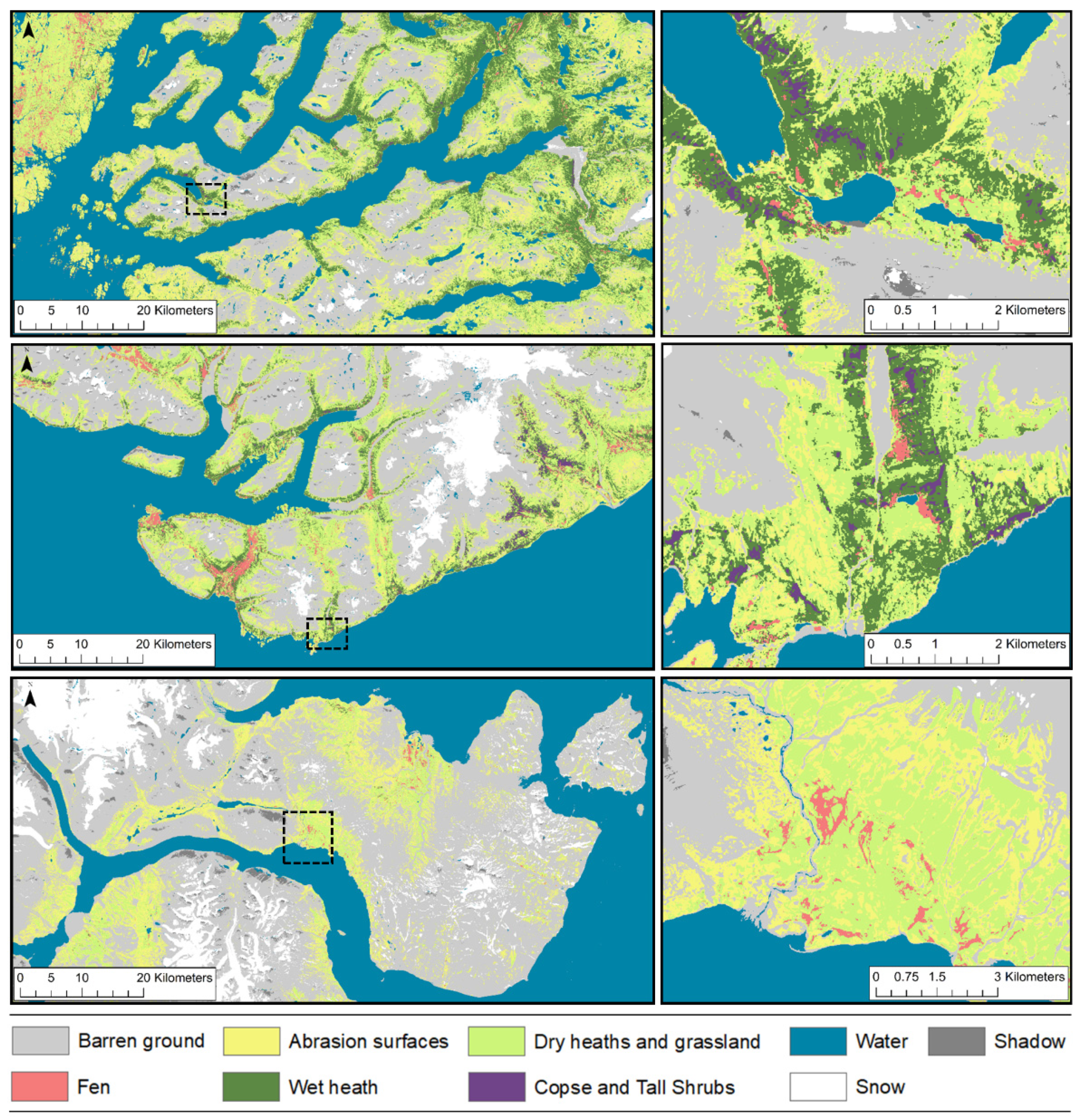
3.2. Image Classification and Validation
4. Discussion
4.1. Data Preprocessing and Masking
4.2. Phenology Metric Extraction
4.3. Feature Importance
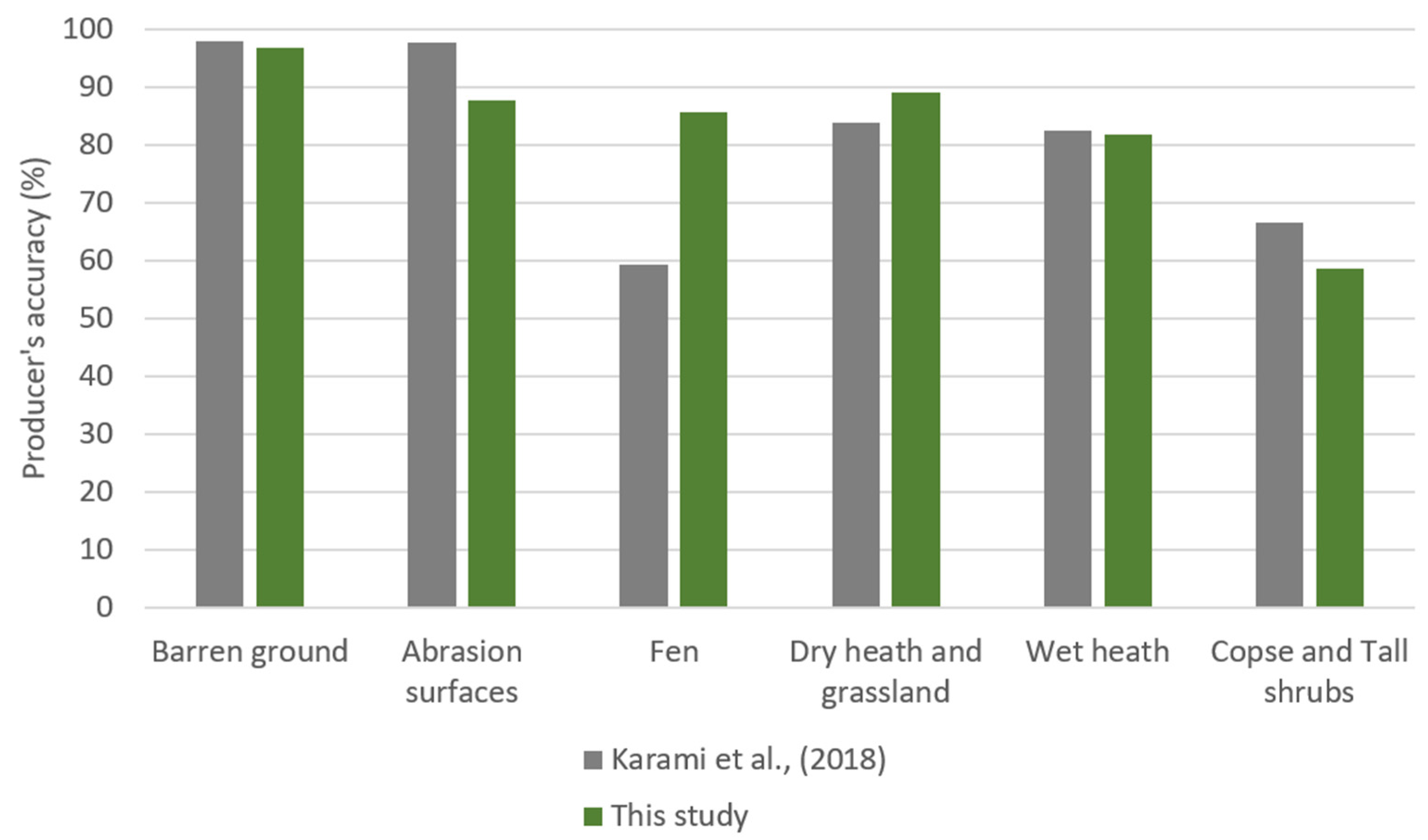
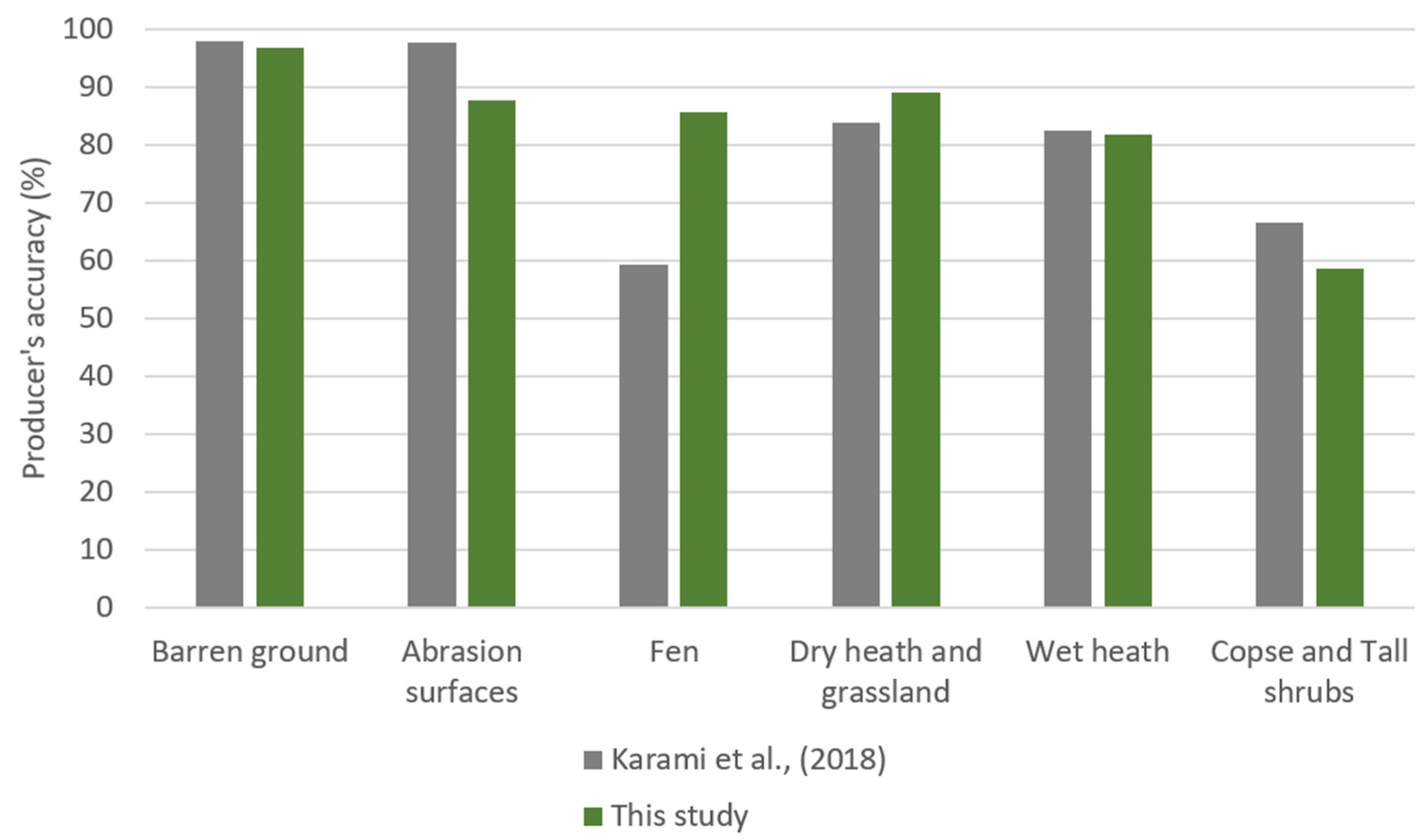
4.4. Overall Classification Performance
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shukla, P.; Skea, J.; Calvo Buendia, E.; Masson-Delmotte, V.; Pörtner, H.; Roberts, D.; Zhai, P.; Slade, R.; Connors, S.; Van Diemen, R. IPCC, 2019: Climate Change and Land: An IPCC Special Report on Climate Change, Desertification, Land Degradation, Sustainable Land Management, Food Security, and Greenhouse Gas Fluxes in Terrestrial Ecosystems; IPCC: Geneva, Switzerland, 2019. [Google Scholar]
- Christensen, T.R.; Friborg, T.; Sommerkorn, M.; Kaplan, J.; Illeris, L.; Soegaard, H.; Nordstroem, C.; Jonasson, S. Trace gas exchange in a high-Arctic valley: 1. Variationsin CO2 and CH4 Flux between tundra vegetation types. Glob. Biogeochem. Cycles 2000, 14, 701–713. [Google Scholar] [CrossRef]
- D’Imperio, L.; Nielsen, C.S.; Westergaard-Nielsen, A.; Michelsen, A.; Elberling, B. Methane oxidation in contrasting soil types: Responses to experimental warming with implication for landscape-integrated CH4 budget. Glob. Chang. Biol. 2017, 23, 966–976. [Google Scholar] [CrossRef] [Green Version]
- Juncher Jørgensen, C.; Lund Johansen, K.M.; Westergaard-Nielsen, A.; Elberling, B. Net regional methane sink in High Arctic soils of northeast Greenland. Nat. Geosci. 2014, 8, 20–23. [Google Scholar] [CrossRef]
- Blok, D.; Heijmans, M.M.P.D.; Schaepman-Strub, G.; Kononov, A.V.; Maximov, T.C.; Berendse, F. Shrub expansion may reduce summer permafrost thaw in Siberian tundra. Glob. Chang. Biol. 2010, 16, 1296–1305. [Google Scholar] [CrossRef]
- Juszak, I.; Erb, A.M.; Maximov, T.C.; Schaepman-Strub, G. Arctic shrub effects on NDVI, summer albedo and soil shading. Remote Sens. Environ. 2014, 153, 79–89. [Google Scholar] [CrossRef] [Green Version]
- Bartsch, A.; Höfler, A.; Kroisleitner, C.; Trofaier, A. Land cover mapping in northern high latitude permafrost regions with satellite data: Achievements and remaining challenges. Remote Sens. 2016, 8, 979. [Google Scholar] [CrossRef] [Green Version]
- Westermann, S.; Elberling, B.; Højlund Pedersen, S.; Stendel, M.; Hansen, B.U.; Liston, G.E. Future permafrost conditions along environmental gradients in Zackenberg, Greenland. Cryosphere 2015, 9, 719–735. [Google Scholar] [CrossRef] [Green Version]
- Azzari, G.; Lobell, D.B. Landsat-based classification in the cloud: An opportunity for a paradigm shift in land cover monitoring. Remote Sens. Environ. 2017, 202, 64–74. [Google Scholar] [CrossRef]
- Kumar, L.; Mutanga, O. Google Earth Engine applications since inception: Usage, trends, and potential. Remote Sens. 2018, 10, 1509. [Google Scholar] [CrossRef] [Green Version]
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Carrasco, L.; O’Neil, A.; Morton, R.; Rowland, C. Evaluating combinations of temporally aggregated Sentinel-1, Sentinel-2 and Landsat 8 for land cover mapping with Google Earth Engine. Remote Sens. 2019, 11, 288. [Google Scholar] [CrossRef] [Green Version]
- Poortinga, A.; Clinton, N.; Saah, D.; Cutter, P.; Chishtie, F.; Markert, K.; Anderson, E.; Troy, A.; Fenn, M.; Tran, L.; et al. An operational Before-After-Control-Impact (BACI) designed platform for vegetation monitoring at planetary scale. Remote Sens. 2018, 10, 760. [Google Scholar] [CrossRef] [Green Version]
- Fred, J.A.D. Vegetation classification in Greenland. J. Veg. Sci. 1994, 5, 781–790. [Google Scholar] [CrossRef]
- Raynolds, M.K.; Walker, D.A.; Balser, A.; Bay, C.; Campbell, M.; Cherosov, M.M.; Daniëls, F.J.A.; Eidesen, P.B.; Ermokhina, K.A.; Frost, G.V.; et al. A raster version of the Circumpolar Arctic Vegetation Map (CAVM). Remote Sens. Environ. 2019, 232, 111297. [Google Scholar] [CrossRef]
- Walker, D.A.; Daniëls, F.J.A.; Matveyeva, N.V.; Šibík, J.; Walker, M.D.; Breen, A.L.; Druckenmiller, L.A.; Raynolds, M.K.; Bültmann, H.; Hennekens, S.; et al. Circumpolar Arctic vegetation classification. Phytocoenologia 2018, 48, 181–201. [Google Scholar] [CrossRef]
- Karami, M.; Westergaard-Nielsen, A.; Normand, S.; Treier, U.A.; Elberling, B.; Hansen, B.U. A phenology-based approach to the classification of Arctic tundra ecosystems in Greenland. ISPRS J. Photogramm. Remote Sens. 2018, 146, 518–529. [Google Scholar] [CrossRef]
- Jensen, J.R. Remote Sensing of the Environment: An Earth Resource Perspective, 2nd ed.; Pearson Education: Delhi, India, 2009. [Google Scholar]
- Hennessy, A.; Clarke, K.; Lewis, M. Hyperspectral classification of plants: A review of waveband selection generalisability. Remote Sens. 2020, 12, 113. [Google Scholar] [CrossRef] [Green Version]
- Raynolds, M.K.; Walker, D.A.; Epstein, H.E.; Pinzon, J.E.; Tucker, C.J. A new estimate of tundra-biome phytomass from trans-Arctic field data and AVHRR NDVI. Remote Sens. Lett. 2011, 3, 403–411. [Google Scholar] [CrossRef]
- Stow, D.A.; Hope, A.; McGuire, D.; Verbyla, D.; Gamon, J.; Huemmrich, F.; Houston, S.; Racine, C.; Sturm, M.; Tape, K.; et al. Remote sensing of vegetation and land-cover change in Arctic Tundra Ecosystems. Remote Sens. Environ. 2004, 89, 281–308. [Google Scholar] [CrossRef] [Green Version]
- Eklundh, L.; Jönsson, P. TIMESAT: A software package for time-series processing and assessment of vegetation dynamics. In Remote Sensing Time Series; Springer: Cham, Switzerland, 2015; pp. 141–158. [Google Scholar]
- Khatami, R.; Mountrakis, G.; Stehman, S.V. A meta-analysis of remote sensing research on supervised pixel-based land-cover image classification processes: General guidelines for practitioners and future research. Remote Sens. Environ. 2016, 177, 89–100. [Google Scholar] [CrossRef] [Green Version]
- Feng, M.; Sexton, J.O.; Channan, S.; Townshend, J.R. A global, high-resolution (30-m) inland water body dataset for 2000: First results of a topographic–spectral classification algorithm. Int. J. Digit. Earth 2015, 9, 113–133. [Google Scholar] [CrossRef] [Green Version]
- Verpoorter, C.; Kutser, T.; Tranvik, L. Automated mapping of water bodies using Landsat multispectral data. Limnol. Oceanogr. Methods 2012, 10, 1037–1050. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated water extraction index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Fisher, A.; Flood, N.; Danaher, T. Comparing Landsat water index methods for automated water classification in eastern Australia. Remote Sens. Environ. 2016, 175, 167–182. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Christensen, T.R.; Topp-Jørgensen, E. Greenland Ecosystem Monitoring Strategy 2017–2021; DCE—Danish Centre for Environment and Energy, Aarhus University: Aarhus, Denmark, 2016; p. 44. [Google Scholar]
- Elberling, B.; Tamstorf, M.P.; Michelsen, A.; Arndal, M.F.; Sigsgaard, C.; Illeris, L.; Bay, C.; Hansen, B.U.; Christensen, T.R.; Hansen, E.S.; et al. Soil and plant community-characteristics and dynamics at Zackenberg. Adv. Ecol. Res. 2008, 40, 223–248. [Google Scholar]
- Karami, M.; Hansen, B.U.; Westergaard-Nielsen, A.; Abermann, J.; Lund, M.; Schmidt, N.M.; Elberling, B. Vegetation phenology gradients along the west and east coasts of Greenland from 2001 to 2015. Ambio 2017, 46, 94–105. [Google Scholar] [CrossRef] [Green Version]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Howat, I.M.; Negrete, A.; Smith, B.E. The Greenland Ice Mapping Project (GIMP) land classification and surface elevation data sets. Cryosphere 2014, 8, 1509–1518. [Google Scholar] [CrossRef] [Green Version]
- Hall, D.K.; Riggs, G.A.; Salomonson, V.V.; Barton, J.; Casey, K.; Chien, J.; DiGirolamo, N.; Klein, A.; Powell, H.; Tait, A. Algorithm Theoretical Basis Document (ATBD) for the MODIS Snow and Sea Ice-Mapping Algorithms. Nasa GSFC. 2001; p. 45. Available online: https://eospso.gsfc.nasa.gov/sites/default/files/atbd/atbd_mod10.pdf (accessed on 20 April 2021).
- McFeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote. Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W.; Harlan, J.C. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation. NASA/GSFC Type III Final Report, Greenbelt, Md. 1974, p. 371. Available online: https://core.ac.uk/download/pdf/42887948.pdf (accessed on 23 April 2021).
- Fernández-Manso, A.; Fernández-Manso, O.; Quintano, C. SENTINEL-2A red-edge spectral indices suitability for discriminating burn severity. Int. J. Appl.Earth Obs. Geoinf. 2016, 50, 170–175. [Google Scholar] [CrossRef]
- Ji, L.; Zhang, L.; Wylie, B.K.; Rover, J. On the terminology of the spectral vegetation index (NIR − SWIR)/(NIR + SWIR). Int. J. Remote Sens. 2011, 32, 6901–6909. [Google Scholar] [CrossRef]
- Key, C.H.; Benson, N.C. Measuring and remote sensing of burn severity. In Proceedings of the Joint Fire Science Conference and Workshop, Boise, ID, USA, 15–17 June 1999; p. 284. [Google Scholar]
- Huete, A.; Didan, K.; van Leeuwen, W.; Vermote, E. Global-scale analysis of vegetation indices for moderate resolution monitoring of terrestrial vegetation. In Remote Sensing for Earth Science, Ocean, and Sea Ice Applications, Proceedings of the Remote Sensing, Florence, Italy, 20–24 September 1999; SPIE: Bellingham, WA, USA, 1999; Volume 3868, pp. 141–151. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Boehmke, B.; Greenwell, B.M. Hands-on Machine Learning with R; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Stehman, S.V.; Woodcock, C.E. Making better use of accuracy data in land change studies: Estimating accuracy and area and quantifying uncertainty using stratified estimation. Remote Sens. Environ. 2013, 129, 122–131. [Google Scholar] [CrossRef]
- Foody, G.M. Thematic map comparison: Evaluating the statistical significance of differences in classification accuracy. Photogramm. Eng. Remote Sens. 2004, 70, 627–633. [Google Scholar] [CrossRef]
- Prishchepov, A.V.; Radeloff, V.C.; Dubinin, M.; Alcantara, C. The effect of Landsat ETM/ETM plus image acquisition dates on the detection of agricultural land abandonment in Eastern Europe. Remote Sensi. Environ. 2012, 126, 195–209. [Google Scholar] [CrossRef]
- Acharya, T.D.; Subedi, A.; Lee, D.H. Evaluation of water indices for surface water extraction in a Landsat 8 scene of Nepal. Sensors 2018, 18, 2580. [Google Scholar] [CrossRef] [Green Version]
- Donchyts, G.; van de Giesen, N.; Gorelick, N. Reconstruction of reservoir and lake surface area dynamics from optical and SAR satellite imagery. In Proceedings of the International Workshop on the Analysis of Multitemporal Remote Sensing Images, Bruges, Belgium, 27–29 June 2017. [Google Scholar]
- Ji, L.; Zhang, L.; Wylie, B. Analysis of dynamic thresholds for the normalized difference water index. Photogramm. Eng. Remote Sens. 2009, 75, 1307–1317. [Google Scholar] [CrossRef]
- Jönsson, P.; Eklundh, L. TIMESAT—A program for analyzing time-series of satellite sensor data. Comput. Geosci. 2004, 30, 833–845. [Google Scholar] [CrossRef] [Green Version]
- Jung, M.; Chang, E. NDVI-based land-cover change detection using harmonic analysis. Int. J. Remote Sens. 2015, 36, 1097–1113. [Google Scholar] [CrossRef]
- Yan, E.; Wang, G.; Lin, H.; Xia, C.; Sun, H. Phenology-based classification of vegetation cover types in Northeast China using MODIS NDVI and EVI time series. Int. J. Remote Sens. 2015, 36, 489–512. [Google Scholar] [CrossRef]
- Forkuor, G.; Dimobe, K.; Serme, I.; Tondoh, J.E. Landsat-8 vs. Sentinel-2: Examining the added value of sentinel-2’s red-edge bands to land-use and land-cover mapping in Burkina Faso. GISci. Remote Sens. 2017, 55, 331–354. [Google Scholar] [CrossRef]
- Sun, L.; Chen, J.; Guo, S.; Deng, X.; Han, Y. Integration of time series Sentinel-1 and Sentinel-2 imagery for crop type mapping over oasis agricultural areas. Remote Sens. 2020, 12, 158. [Google Scholar] [CrossRef] [Green Version]
- Fletcher, K. SENTINEL 2: ESA’s Optical High-Resolution Mission for GMES Operational Services; European Space Agency: Paris, France, 2012. [Google Scholar]
- Hirayama, H.; Sharma, R.C.; Tomita, M.; Hara, K. Evaluating multiple classifier system for the reduction of salt-and-pepper noise in the classification of very-high-resolution satellite images. Int. J. Remote Sens. 2019, 40, 2542–2557. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Kobbefjord | Disko | Zackenberg |
|---|---|---|---|
| Climate zone | Low Arctic | Low/High Arctic | High Arctic |
| Mean annual temperature (°C) | −0.9 | −3.2 | −9.2 |
| Total annual precipitation (mm) | 782 | 436 | 200 |
| Sea ice | Yes | Yes | Yes |
| Permafrost | None | Discontinuous | Continuous |
| Surface Class | Characteristics | |
|---|---|---|
| 1. | Barren ground | Not covered by vegetation during the growing season; Mostly rocks or wind-blown surfaces in high elevations |
| 2. | Abrasion surfaces | Receives low amount of snow in the winter; dry with very low vegetation activity during the growing season; Very sparse dryas and/or grasses |
| 3. | Fen | Water logged areas located in landscape depressions; covered with grasses and mosses |
| 4. | Dry heath and grasslands | Betula and Vaccinum; Almost no Salix; Relatively low amount of snow during winter, and therefore receive low amount of melt water in the growing season |
| 5. | Wet heath | A mix of Betula, Vaccinum, Salix, and Empetrum; Receive relatively more amount of snow in the winter compared with dry heath and are therefore more wet in the growing season; Not higher than 40 cm in height |
| 6. | Copse and Tall shrubs | Mostly Salix and Betula. Taller than 40 cm; Receive fair amount of snow during winter and are wet during the growing season |
| Kobbefjord | Disko | Zackenberg | Total GRD | |
|---|---|---|---|---|
| Barren ground | 70 | 81 | 116 | 267 |
| Abrasion surfaces | 39 | 23 | 80 | 142 |
| Fen | 83 | 9 | 111 | 203 |
| Dry heaths and grasslands | 59 | 44 | 143 | 246 |
| Wet heath | 163 | 31 | 5 | 199 |
| Copse and Tall Shrubs | 57 | 48 | 2 | 107 |
| Total GRD | 471 | 236 | 457 | 1164 |
| Spectral Index | Formulation | Reference |
|---|---|---|
| NDVI (Narrow NIR) | [37] | |
| VI RE1 | [38] | |
| VI RE2 | [38] | |
| VI RE3 | [38] | |
| NDMI | [39] | |
| NBR | [40] | |
| NBR2 | [40] | |
| ND RE1 & RE2 | [38] | |
| ND RE1 & RE3 | [38] | |
| ND RE2 & RE3 | [38] | |
| EVI | [41] | |
| SAVI | [42] | |
| NDWI | [36] |
| Kobbefjord (%) | Disko (%) | Zackenberg (%) | |
|---|---|---|---|
| Barren ground | 31.7 (±1.2) | 50.6 (±1.2) | 75.0 (±1.7) |
| Abrasion surfaces | 19.3 (±1.6) | 11.8 (±1.3) | 15.0 (±1.7) |
| Fen | 2.1 (±0.4) | 3.1 (±0.3) | 0.4 (±0.1) |
| Dry heaths and grassland | 29.2 (±1.6) | 23.8 (±1.2) | 8.6 (±1.0) |
| Wet heath | 16.7 (±1.2) | 9.0 (±0.9) | 0.9 (±0.4) |
| Copse and Tall Shrubs | 0.9 (±0.5) | 1.7 (±0.3) | <0.1 (±0.1) |
| Reference | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Barren ground | Abrasion surfaces | Fen | Dry heaths and grassland | Wet heath | Copse and Tall Shrubs | Total | Prod. acc. after proportion adjustment (%) | User’s acc. after proportion adjustment (%) | ||
| Predicted | Barren ground | 251 | 6 | 0 | 1 | 0 | 0 | 258 | 96.8 | 97.3 |
| Abrasion surfaces | 15 | 127 | 0 | 13 | 3 | 0 | 158 | 87.8 | 80.4 | |
| Fen | 1 | 0 | 199 | 1 | 4 | 1 | 206 | 85.8 | 96.6 | |
| Dry heaths and grassland | 0 | 8 | 2 | 215 | 15 | 2 | 242 | 89.0 | 88.8 | |
| Wet heath | 0 | 1 | 2 | 15 | 171 | 4 | 193 | 81.8 | 88.6 | |
| Copse and Tall Shrubs | 0 | 0 | 0 | 1 | 6 | 100 | 107 | 58.6 | 93.5 | |
| Total | 267 | 142 | 203 | 246 | 199 | 107 | 1164 | |||
| Area-weighted OA | 91.8 | |||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rudd, D.A.; Karami, M.; Fensholt, R. Towards High-Resolution Land-Cover Classification of Greenland: A Case Study Covering Kobbefjord, Disko and Zackenberg. Remote Sens. 2021, 13, 3559. https://doi.org/10.3390/rs13183559
Rudd DA, Karami M, Fensholt R. Towards High-Resolution Land-Cover Classification of Greenland: A Case Study Covering Kobbefjord, Disko and Zackenberg. Remote Sensing. 2021; 13(18):3559. https://doi.org/10.3390/rs13183559
Chicago/Turabian StyleRudd, Daniel Alexander, Mojtaba Karami, and Rasmus Fensholt. 2021. "Towards High-Resolution Land-Cover Classification of Greenland: A Case Study Covering Kobbefjord, Disko and Zackenberg" Remote Sensing 13, no. 18: 3559. https://doi.org/10.3390/rs13183559
APA StyleRudd, D. A., Karami, M., & Fensholt, R. (2021). Towards High-Resolution Land-Cover Classification of Greenland: A Case Study Covering Kobbefjord, Disko and Zackenberg. Remote Sensing, 13(18), 3559. https://doi.org/10.3390/rs13183559