
Use of X-Band Radars to Monitor Small Garbage Islands



Abstract
:1. Introduction
2. Materials and Methods
2.1. X-Band Radar Specifications
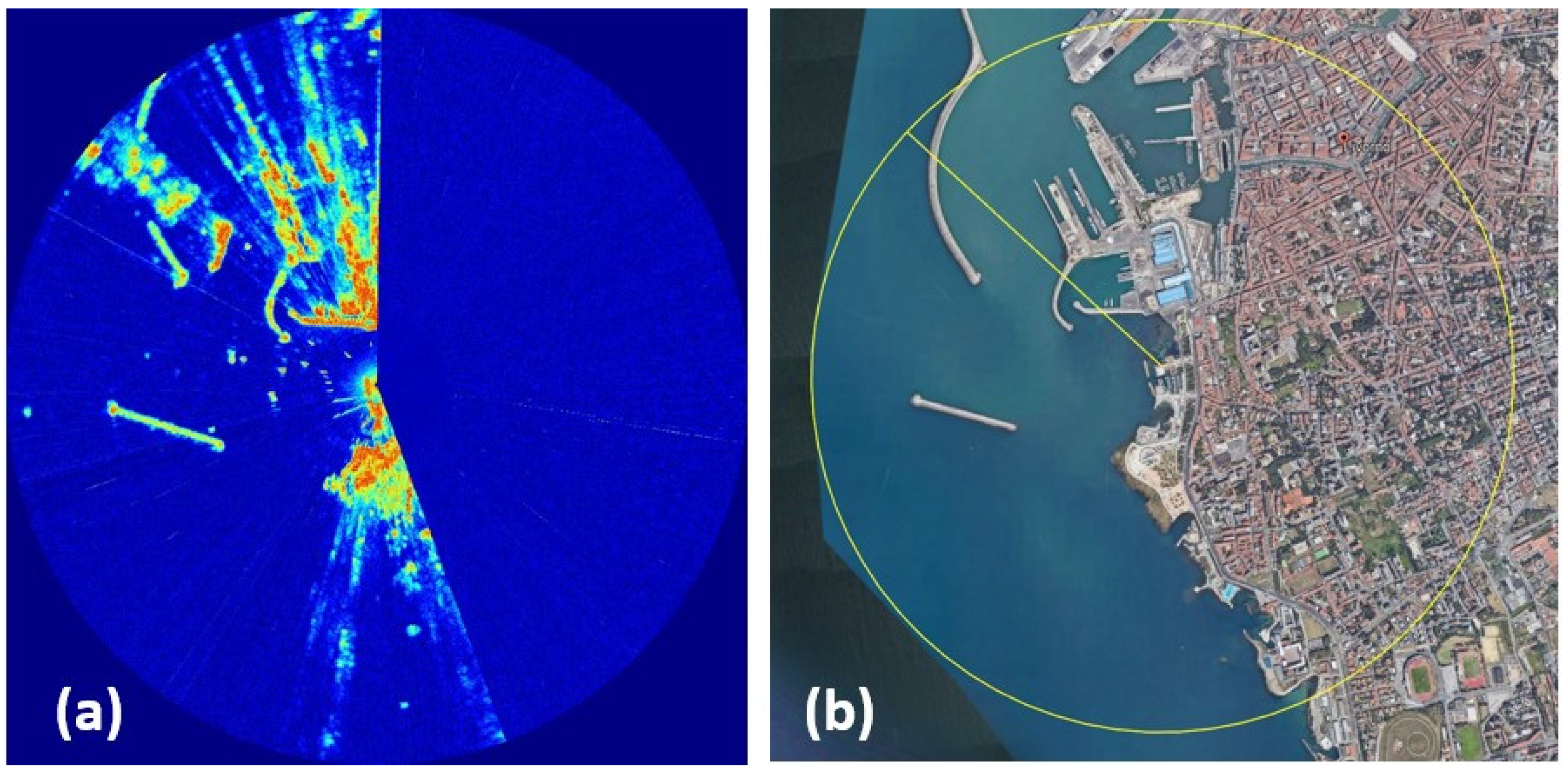
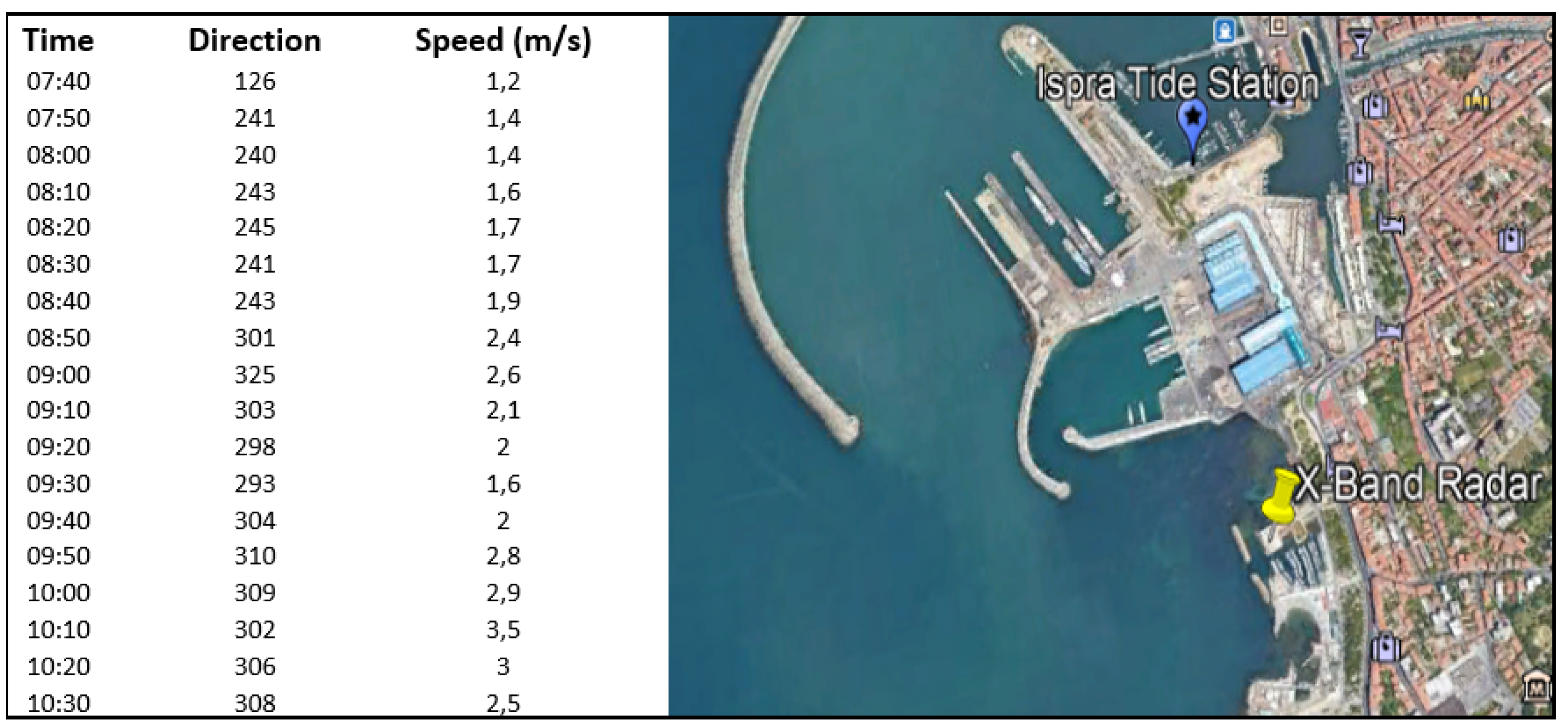
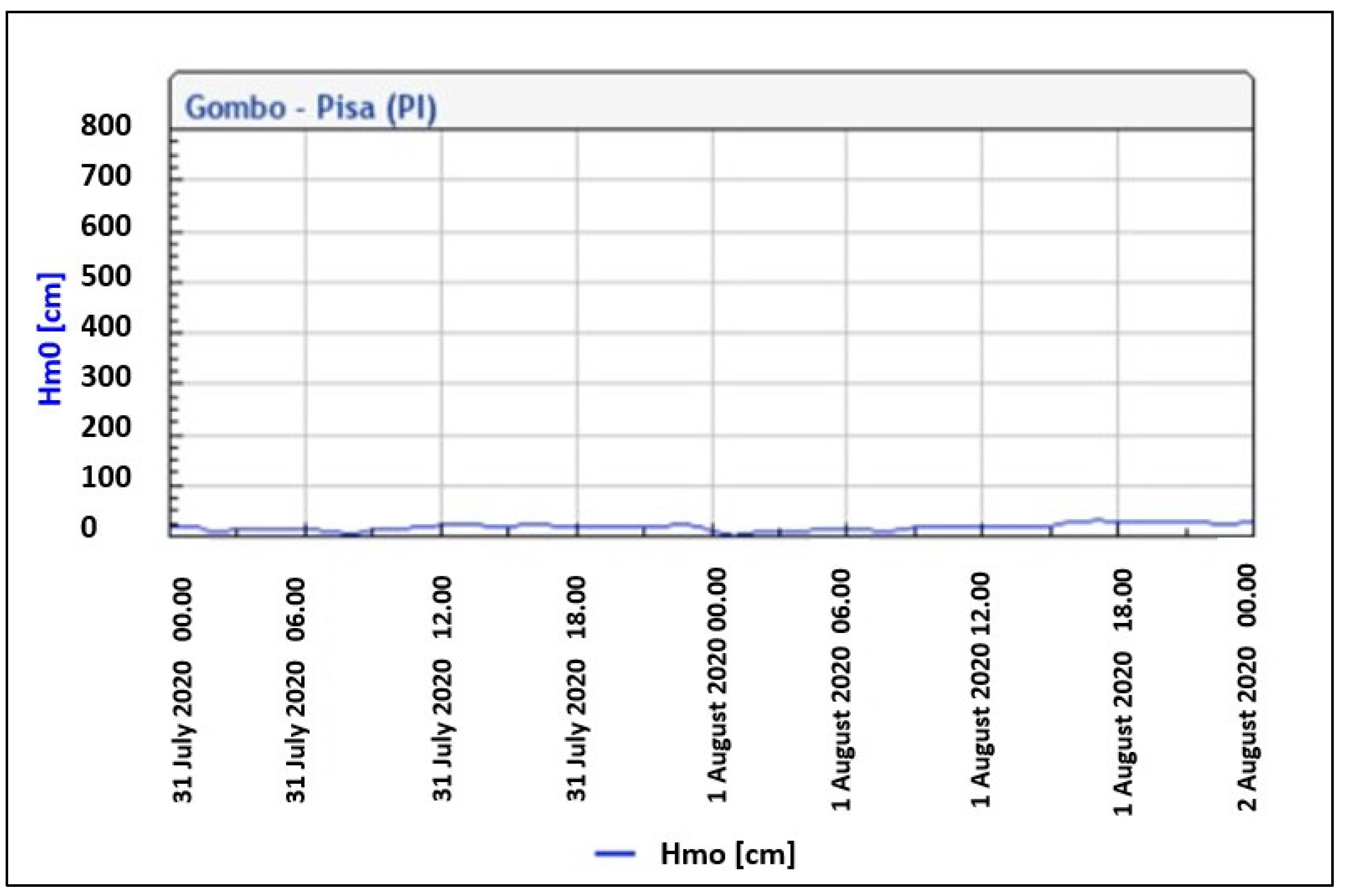
2.2. Description of the Survey Area
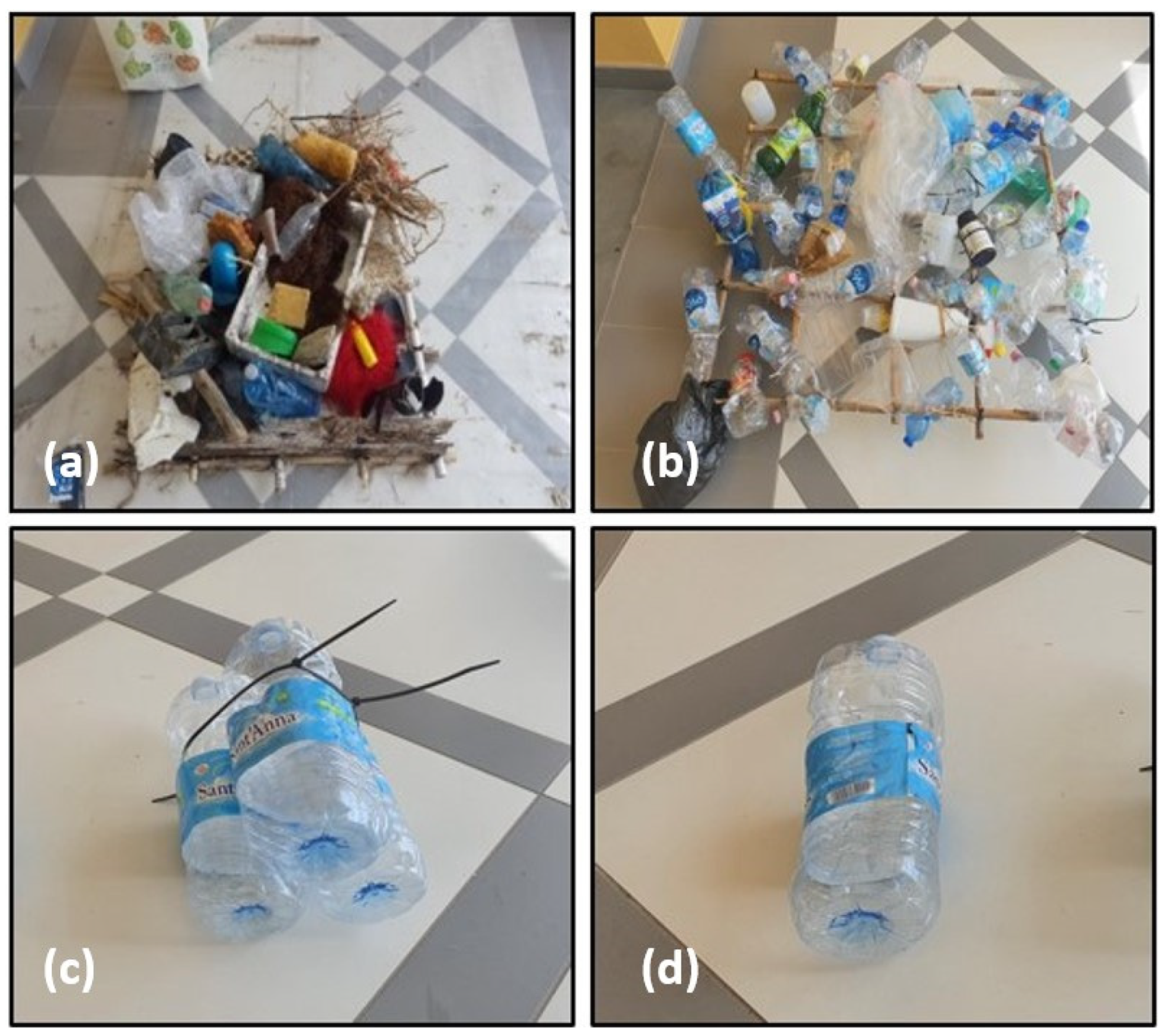
2.3. Small Garbage Island (SGI) Module Construction
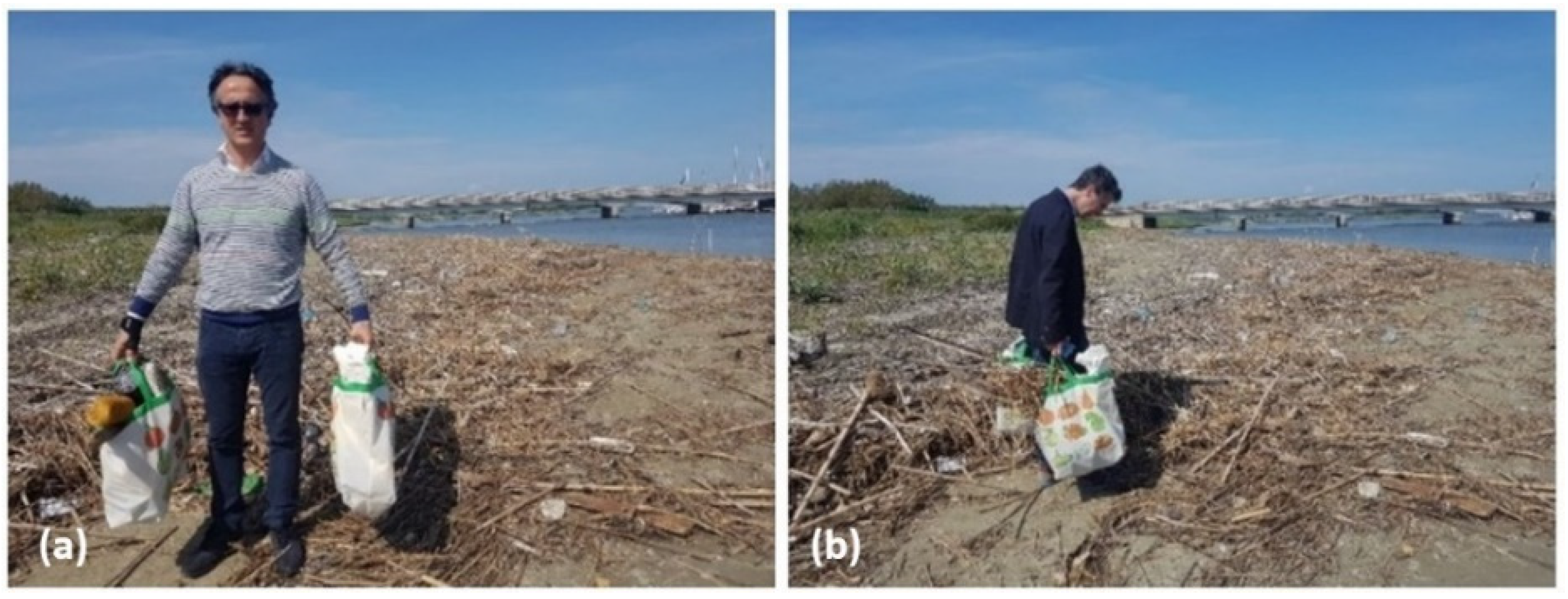
2.4. Measurement Campaign
2.5. Radar Data Processing
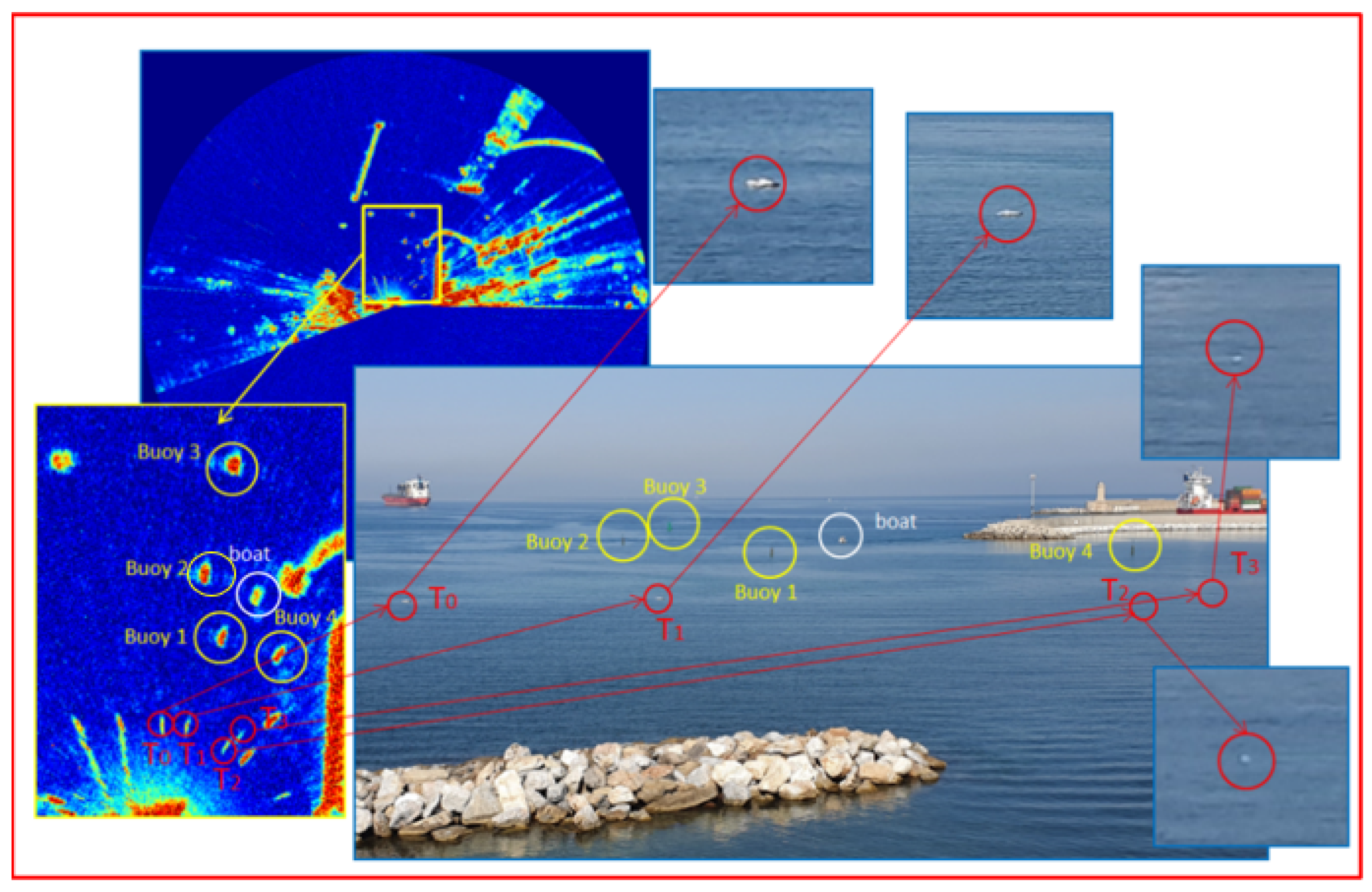
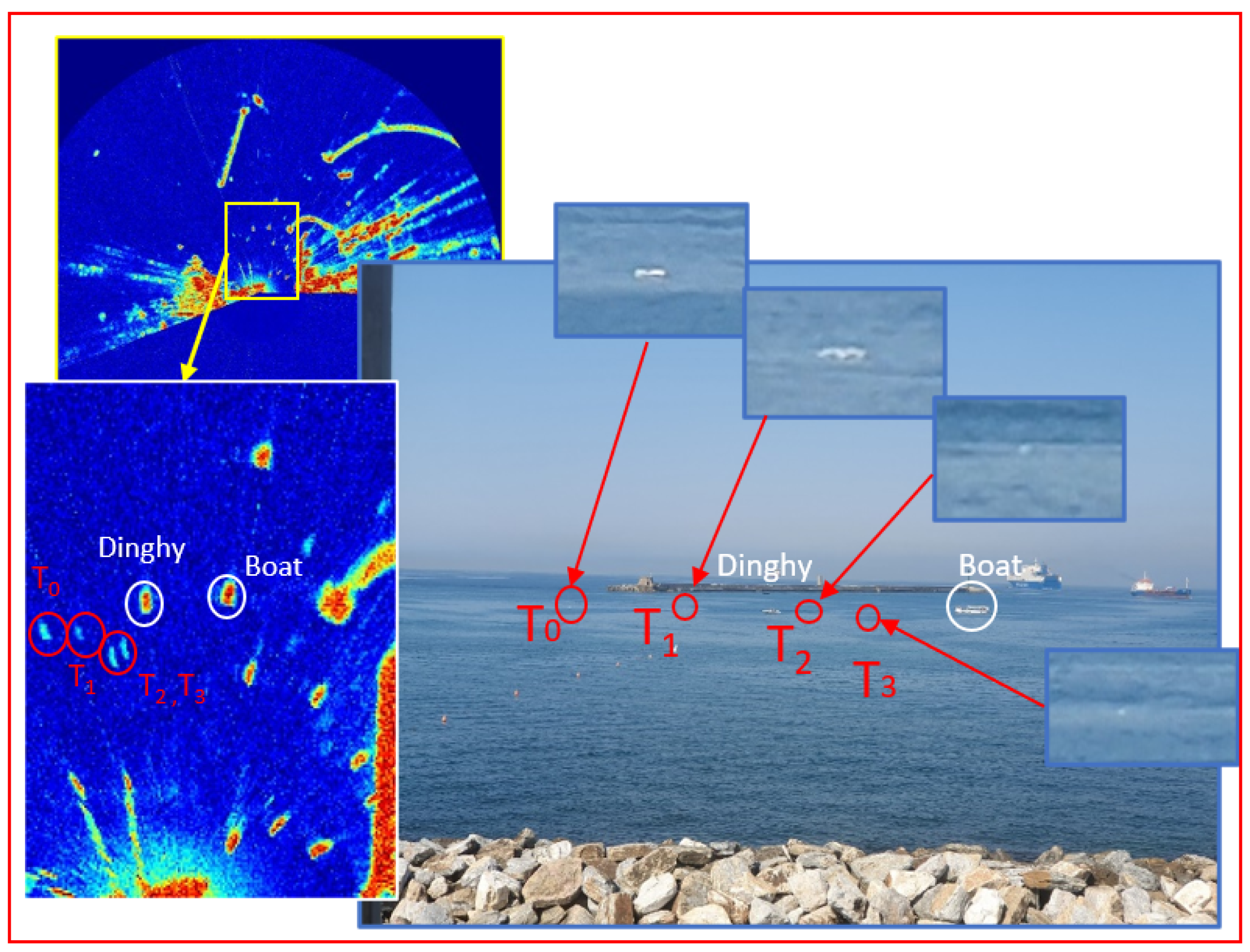
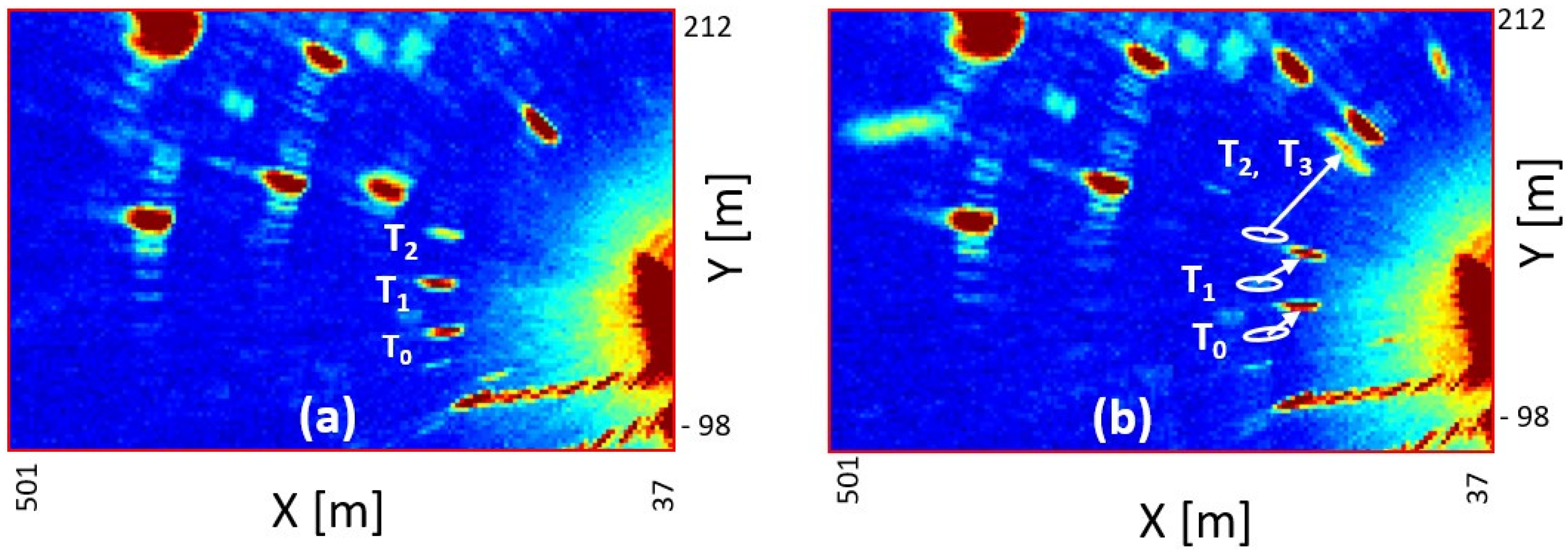
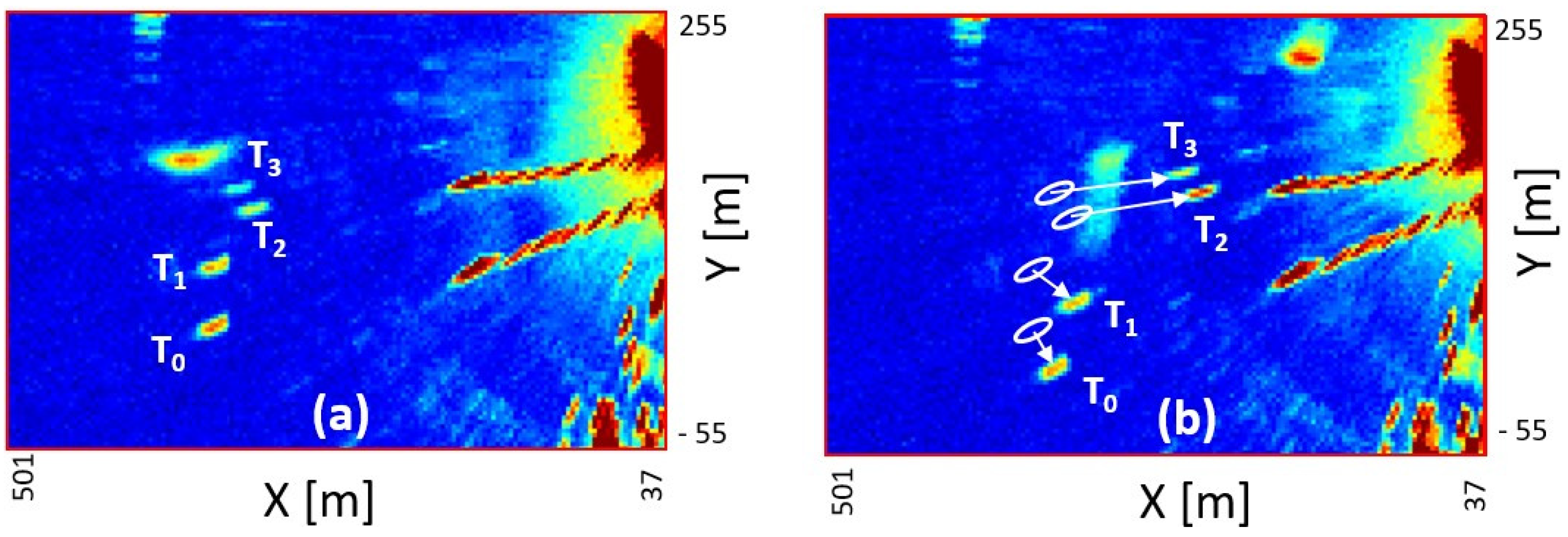
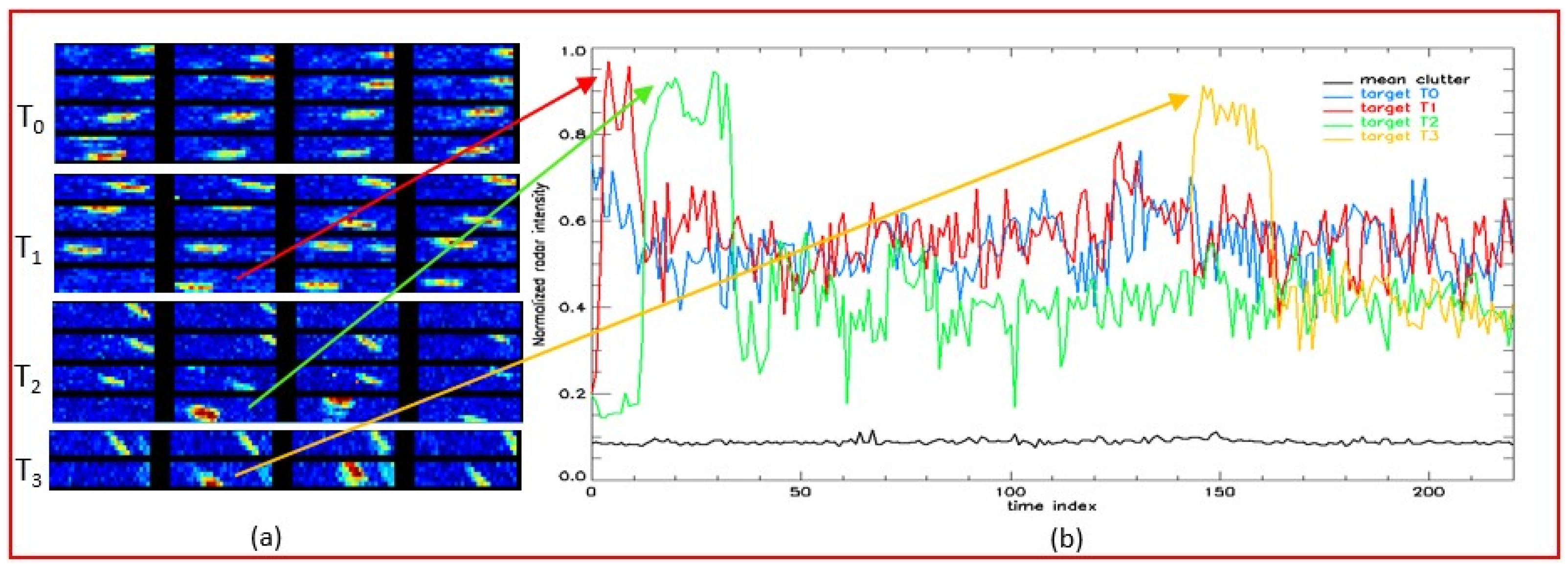
- Identification of the targets on the radar image using photographic images (Figure 7). This phase is essential to have spatial and temporal references to ensure the exact identification of the targets;
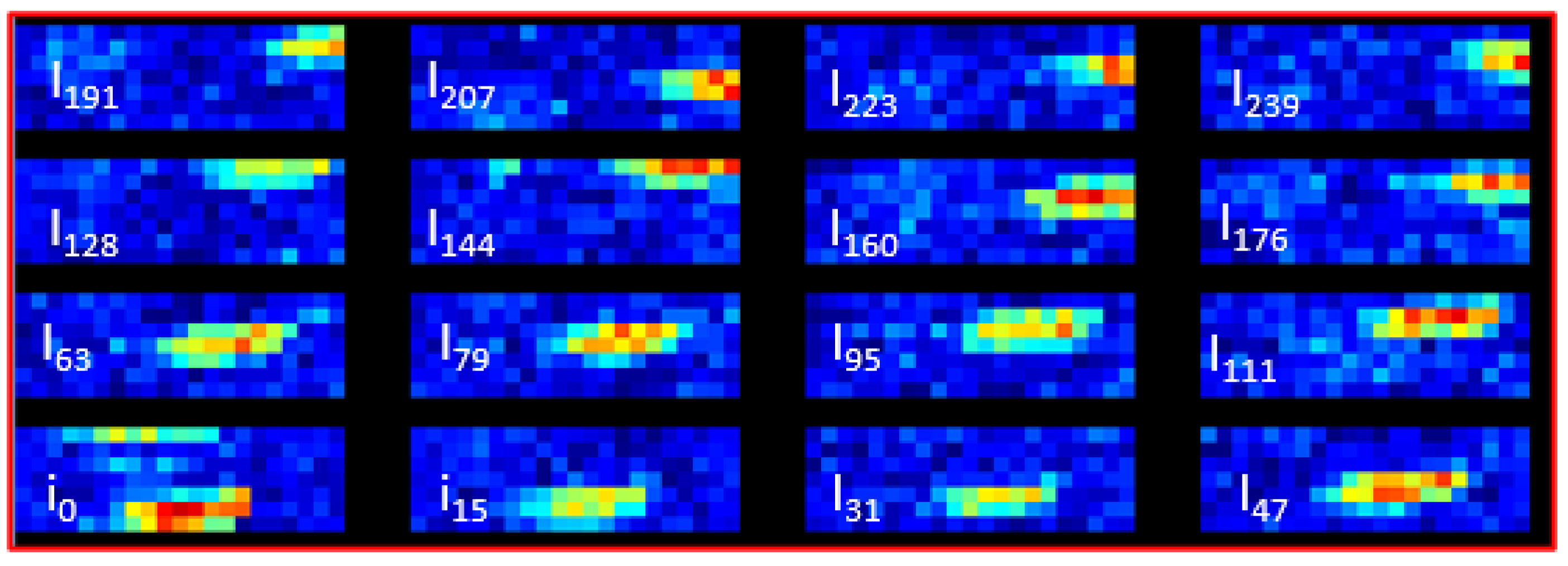
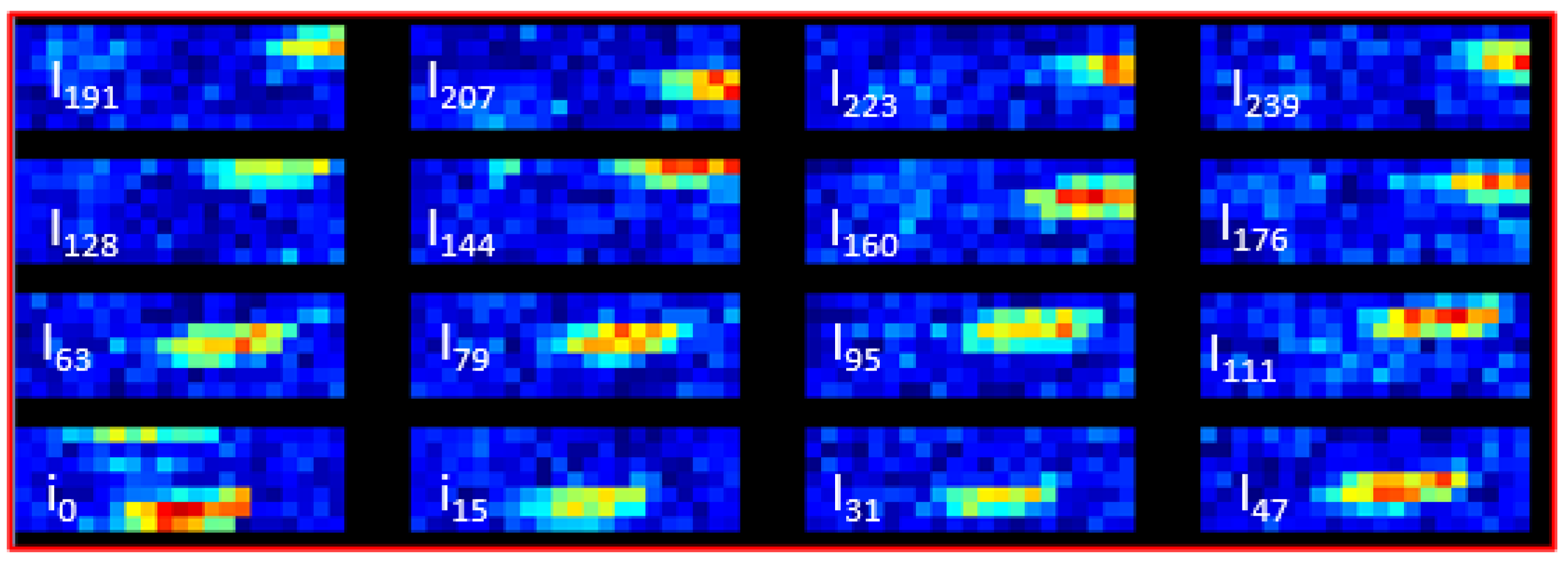
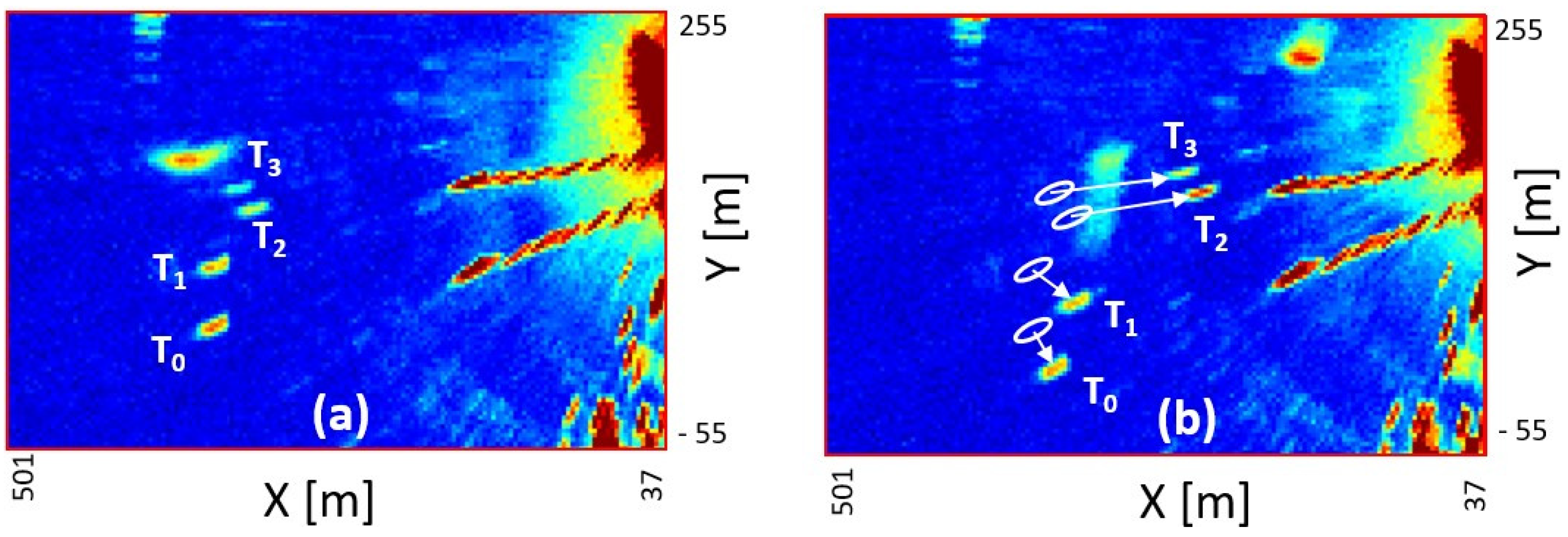
- Extraction of mobile sub-areas containing the targets under investigation for each of the targets T0, T1, T2 and T3. Due to the presence of surface currents and wind, targets are subject to drift/leeway; therefore, it would be necessary to define mobile sub-areas that are able to "follow" the targets while also taking into account their speed. However, in this work, to ensure the presence of the targets within the sub-areas, a manual tracking procedure was adopted, as shown in Figure 8. In a future work, it will be appropriate to define a more accurate and robust procedure for a dynamic definition of the sub-areas, such as to automatically compensate for the drifting of the targets and so that the sub-areas are exactly centered on the targets;
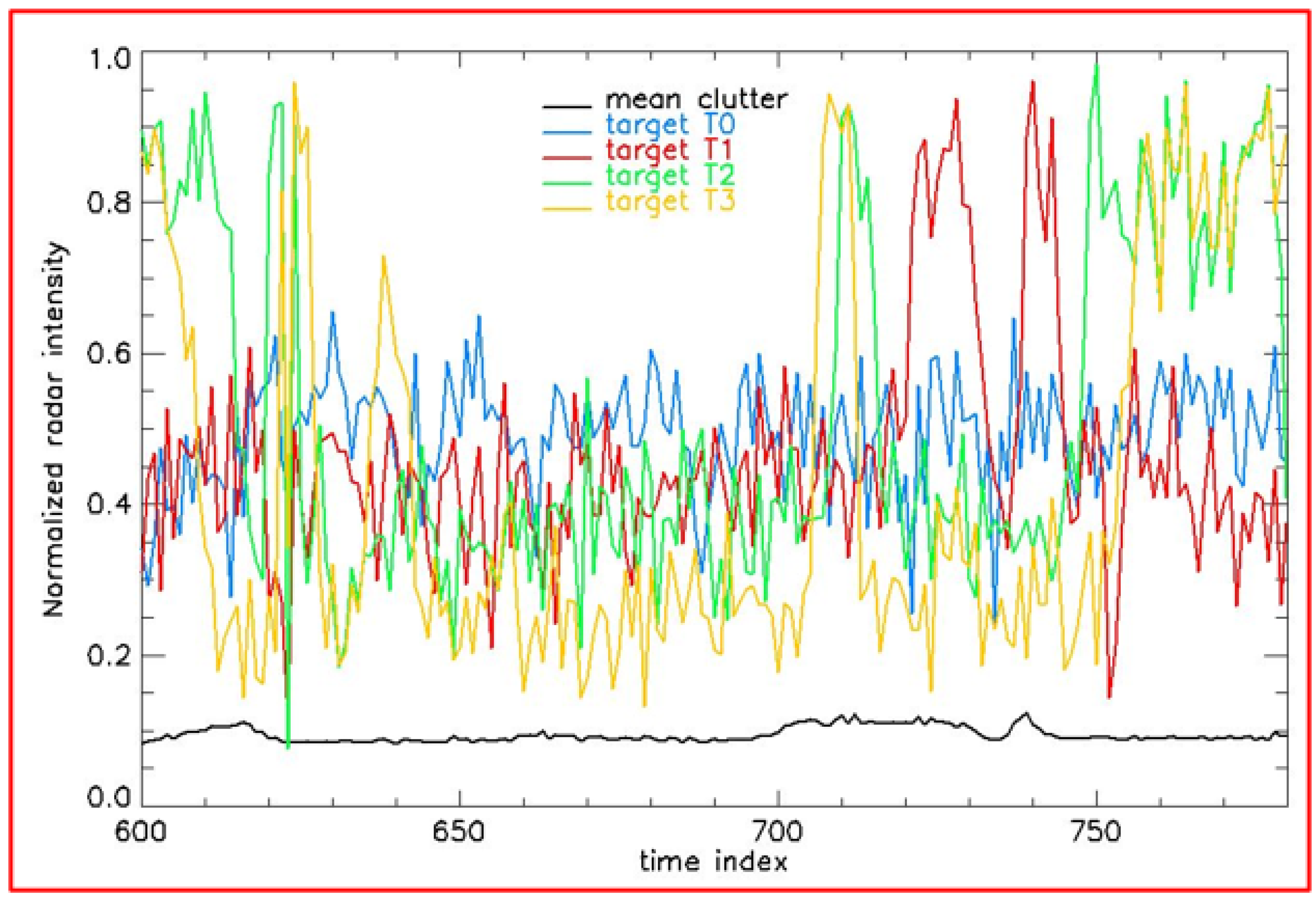
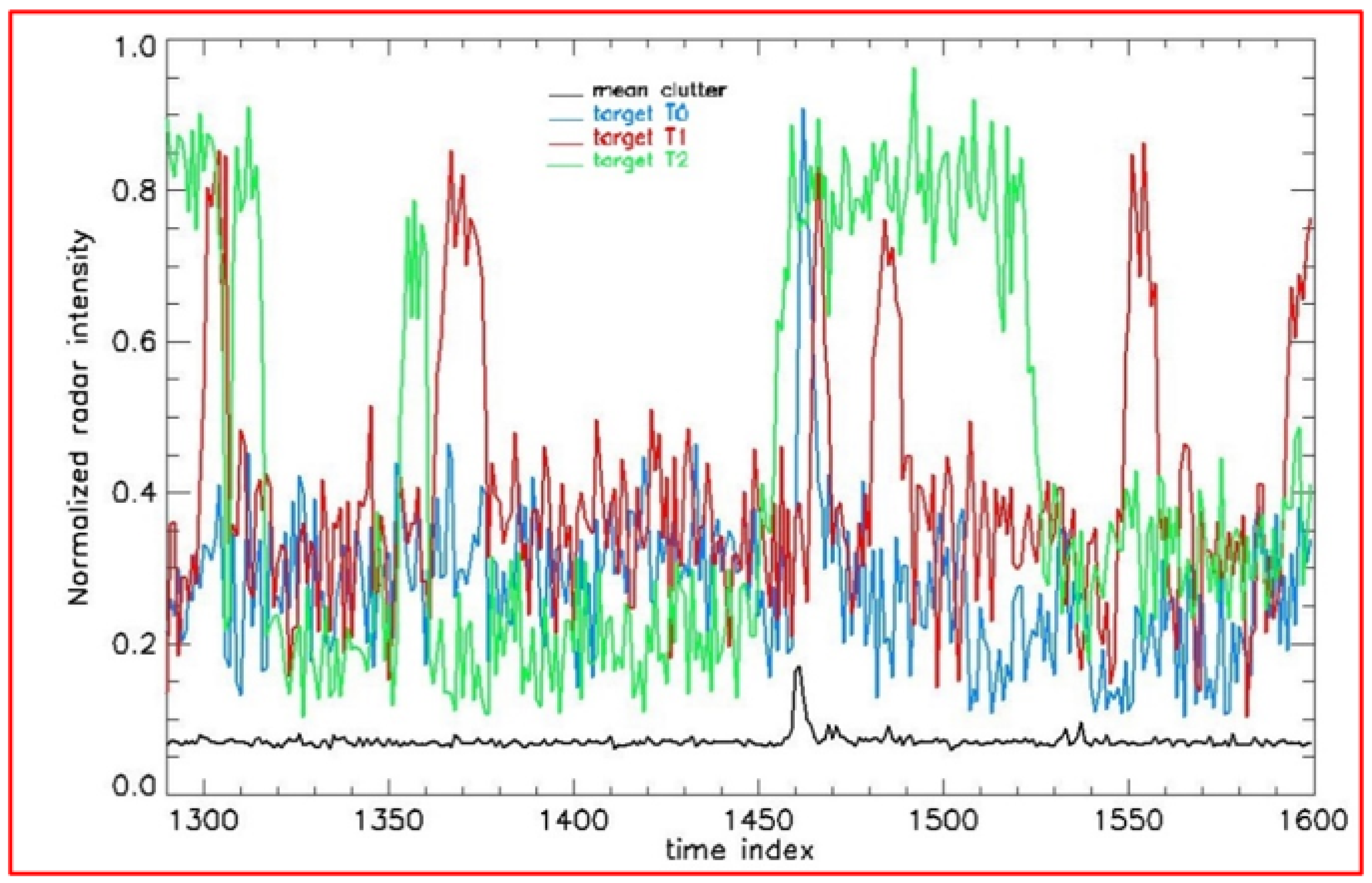
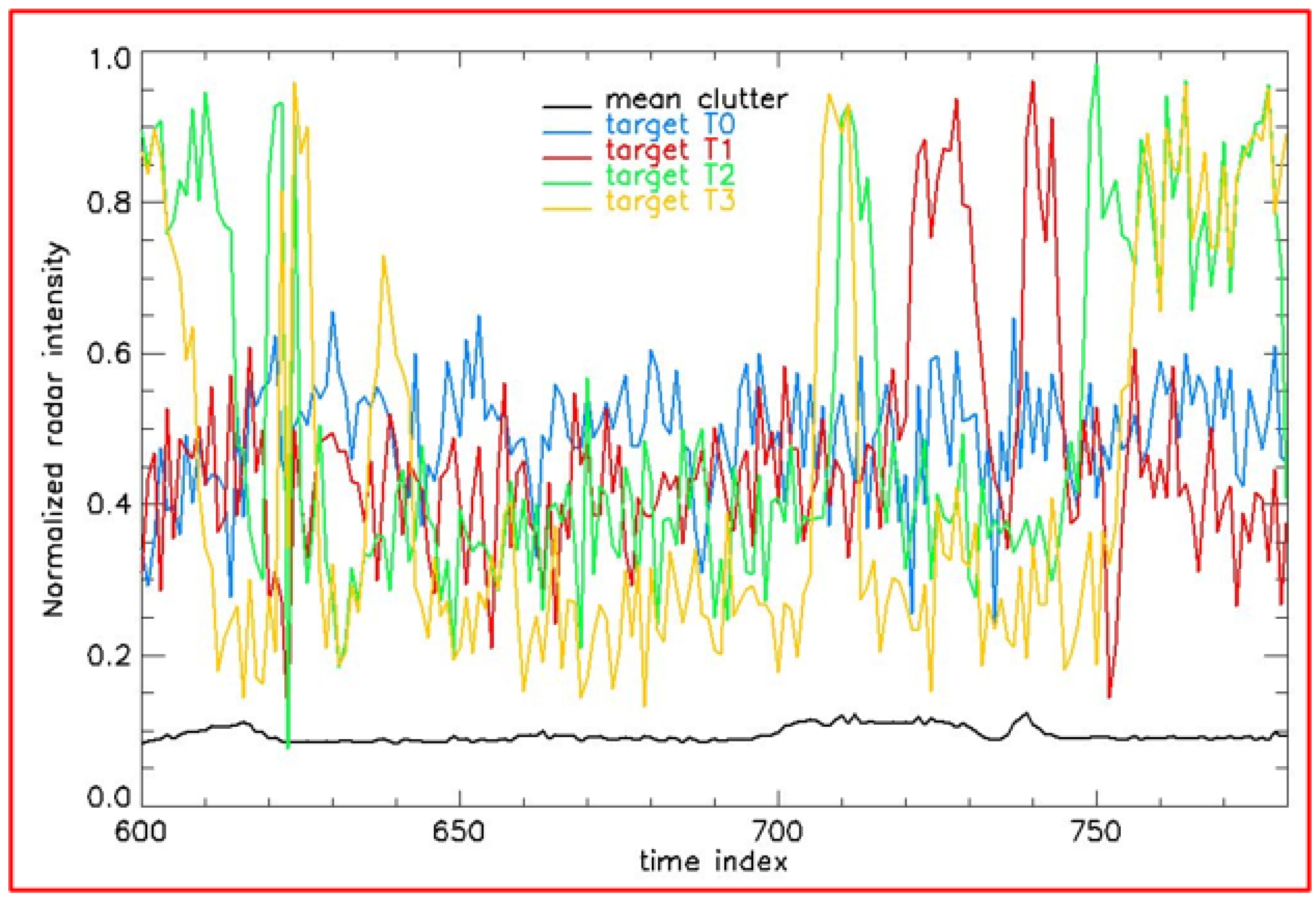
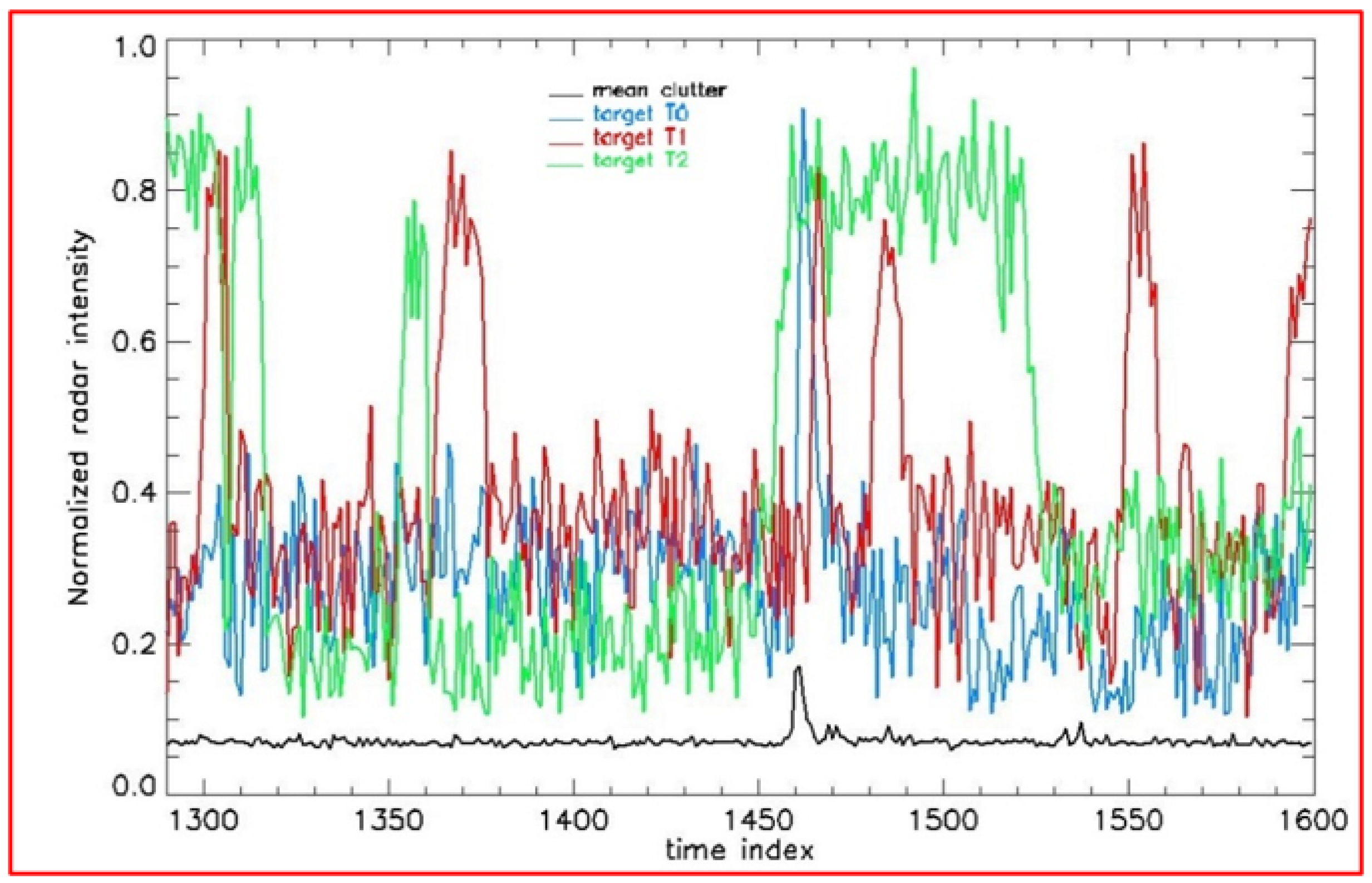
- Measurement of the maximum intensity value detected for each sub-area containing the targets T0, T1, T2 and T3 at each instant of time.
3. Results
3.1. Radar Signal Intensity Analysis
3.2. Target Shift/Movement Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Beaumont, N.J.; Aanesen, M.; Austen, M.C.; Borger, T.; Clark, J.R.; Cole, M.; Hooper, T.; Lindeque, P.K.; Pascoe, C.; Wyles, K.J. Global ecological, social and economic impacts of marine plastic. Mar. Pollut. Bull. 2019, 142, 189–195. [Google Scholar] [CrossRef]
- Derraik, J.G.B. The pollution of the marine environment by plastic debris: A review. Mar. Pollut. Bull. 2002, 44, 842–852. [Google Scholar] [CrossRef]
- Sheavly, S.B.; Register, K.M. Marine debris & plastics: Environmental concerns, sources, impacts and solutions. J. Polym. Environ. 2007, 15, 301–305. [Google Scholar]
- Barnes, D.K.A.; Galgani, F.; Thompson, R.C.; Barlaz, M. Accumulation and fragmentation of plastic debris in global environments. Philos. Trans. R. Soc. Lond. B Biol. Sci. 2009, 364, 1985–1998. [Google Scholar] [CrossRef] [Green Version]
- Thompson, R.C.; Moore, C.; Vom Saal, F.S.; Swan, S.H. Plastics, the environment and human health: Current consensus and future trends. Philos. Trans. R. Soc. B 2009, 364, 2153–2166. [Google Scholar] [CrossRef] [PubMed]
- Law, K.L.; Moret-Ferguson, S.; Maximenko, N.A.; Proskurowsk, G.; Peacock, E.E.; Hafner, J.; Reddy, C.M. Plastic accumulation in the north atlantic subtropical gyre. Science 2010, 329, 1185–1188. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- UNEP Year Book 2014. Emerging Issues Update. Chapter 8: Plastic Debris in the Ocean. Available online: https://wedocs.unep.org/20.500.11822/9240 (accessed on 3 September 2021).
- Cozar, A.; Echevarría, F.; González-Gordillo, J.I.; Duarte, C.M. Plastic debris in the open ocean. Procs. Natl. Acad. Sci. USA 2014, 111, 10239–10244. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Geyer, R.; Jambeck, J.R.; Law, K.L. Production, use, and fate of all plastics ever made. Sci. Adv. 2017, 3, e1700782. [Google Scholar] [CrossRef] [Green Version]
- Jambeck, J.R.; Geyer, R.; Wilcox, C.; Siegler, T.R.; Perryman, M.; Andrady, A.; Narayan, R.; Jambeck, K.L.L. Plastic waste inputs from land into the ocean. Science 2015, 347, 768–771. [Google Scholar] [CrossRef]
- Andrady, A.L. Microplastic in the marine environment. Mar. Pollut. Bull. 2011, 62, 1596–1605. [Google Scholar] [CrossRef]
- Deudero, S.; Alomar, C. Mediterranean marine biodiversity under threat: Reviewing influence of marine litter on species. Mar. Pollut. Bull. 2015, 98, 58–68. [Google Scholar] [CrossRef] [PubMed]
- Obbard, R.W.; Sadri, S.; Wong, Y.Q.; Khitun, A.A.; Baker, I.; Thompson, R.C. Global warming releases microplastic legacy frozen in Arctic Sea ice. Earth’s Future 2014, 2, 315–320. [Google Scholar] [CrossRef]
- Galgani, F.; Barnes, D.K.A.; Deudero, S.; Fossi, M.C.; Ghiglione, J.F.; Hema, T. Executive summary. In CIESM Workshop Monograph 46: Marine Litter in the Mediterranean and Black Seas; Briand, F., Ed.; CIESM Publisher: Monaco, 2014; pp. 7–20. [Google Scholar]
- Galgani, F. Distribution, composition and abundance of marine litter in the Mediterranean and black seas. In CIESM Workshop Monograph 46: Marine Litter in the Mediterranean and Black Seas; Briand, F., Ed.; CIESM Publisher: Monaco, 2014; pp. 23–30. [Google Scholar]
- Suaria, G.; Aliani, S. Floating debris in the Mediterranean Sea. Mar. Pollut. Bull. 2014, 86, 494–504. [Google Scholar] [CrossRef]
- Bertrand, J.; Souplet, L.A.; Gil de Soula, G.; Relini, C.P. International Bottom Trawl Survey in the Mediterranean (Medits), Instruction Manual, Version 5. 2007. Available online: https://www.sibm.it/SITO%20MEDITS/file.doc/Medits-Handbook_V5-2007.pdf (accessed on 3 September 2021).
- Cheshire, A.C.; Adler, E.; Barbière, J.; Cohen, Y.; Evans, S.; Jarayabhand, S.; Jeftic, L.; Jung, R.T.; Kinsey, S.; Kusui, E.T.; et al. UNEP/IOC Guidelines on Survey and Monitoring of Marine Litter; United Nations Environment Programme: Nairobi, Kenya, 2009; Available online: https://www.researchgate.net/publication/256186638_UNEPIOC_Guidelines_on_Survey_and_Monitoring_of_Marine_Litter (accessed on 3 September 2021).
- Oosterbaan, L.; Pereira, M.A.; Sheavly, S.; Tkalin, A.; Varadarajan, S.; Wenneker, B.; Westphalen, G. UNEP/IOC Guidelines on Survey and Monitoring of Marine Litter; United Nations Environment Programme: Nairobi, Kenya, 2009. [Google Scholar]
- Arthur, C.; Murphy, P.; Opfer, S.; Morishige, C. Bringing together the marine debris community using “ships of opportunity” and a Federal marine debris information clearinghouse. In Proceedings of the Fifth International Marine Debris Conference, Honolulu, HI, USA, 20–25 March 2011; pp. 449–453. [Google Scholar]
- Van Franeker, J.A.; Blaize, C.; Danielsen, J.; Fairclough, K.; Gollan, J.; Guse, N.; Hansen, P.L.; Heubeck, M.; Jensen, J.K.; Le Guillou, G.; et al. Monitoring plastic ingestion by the northern fulmar Fulmarus glacialis in the North Sea. Environ. Poll. 2011, 159, 2609–2615. [Google Scholar] [CrossRef] [PubMed]
- Hidalgo-Ruz, V.; Gutow, L.; Thompson, R.C.; Thiel, M. Microplastics in the marine environment: A review of the methods used for identification and quantification. Environ. Sci. Techn. 2012, 46, 3060–3075. [Google Scholar] [CrossRef]
- Imhof, H.K.; Schmid, J.; Niessner, R.; Ivleva, N.P.; Laforsch, C. A novel, highly efficient method for the separation and quantification of plastic particles in sediments of aquatic environments. Limnol. Oceanogr.-Methods 2012, 10, 524–537. [Google Scholar] [CrossRef]
- Claessens, M.; Van Cauwenberghe, L.; Vandegehuchte, M.B.; Janssen, C.R. New techniques for the detection of microplastics in sediments and field collected organisms. Mar. Pollut. Bull. 2013, 70, 227–233. [Google Scholar] [CrossRef]
- Galgani, F.; Hanke, G.; Werner, S.; Oosterbaan, L.; Nilsson, P.; Fleet, D.; Kinsey, S.; Thompson, R.C.; Van Franeker, J.; Vlachogianni, T.; et al. Guidance on Monitoring of Marine Litter in European Seas, Eur-Scientific and Technical Research Series 2013. Available online: https://mcc.jrc.ec.europa.eu/documents/201702074014.pdf (accessed on 3 September 2021).
- Galgani, F.; Hanke, G.; Werner, S.; De Vrees, L. Marine litter within the European Marine Strategy. ICES J. Mar. Sci. 2013, 70, 1055–1064. [Google Scholar] [CrossRef]
- Ryan, P.G. A simple technique for counting marine debris at sea reveals steep litter gradients between the straits of Malacca and the bay of bengal. Mar. Pollut. Bull. 2013, 60, 128–136. [Google Scholar] [CrossRef]
- Maximenko, N.; Arvesen, J.; Asner, G.; Carlton, J.; Castrence, M.; Centurioni, L.; Chao, Y.; Chapman, J.; Chirayath, V.; Corradi, P.; et al. Remote sensing of marine debris to study dynamics, balances and trends. In Community White Paper Produced at the Workshop on Mission Concepts for Marine Debris Sensing; International Pacific Research Center: Honolulu, HI, USA, 2016. [Google Scholar]
- Hafeez, S.; Wong, M.S.; Abbas, S.; Kwok, C.Y.T.; Nichol, J.; Ho Lee, K.; Tang, D.; Pun, L. Detection and monitoring of marine pollution using remote sensing technologies. In Monitoring of Marine Pollution; Fouzia, H.B., Ed.; Intech. Open: London, UK, 2019; p. 568. [Google Scholar]
- Moy, K.; Neilson, B.; Chung, A.; Meadows, A.; Castrence, M.; Ambagis, S.; Davidson, K. Mapping coastal marine debris using aerial imagery and spatial analysis. Mar. Pollut. Bull. 2018, 132, 52–59. [Google Scholar] [CrossRef]
- Maximenko, N.; Corradi, P.; Law, K.L.; Van Sebille, E.; Garaba, S.P.; Lampitt, R.S.; Galgani, F.; Martinez-Vicente, V.; Goddijn-Murphy, L.; Veiga, J.M.; et al. Toward the integrated marine debris observing system. Front. Mar. Sci. 2018, 6, 447. [Google Scholar] [CrossRef] [Green Version]
- Lauren, B.; Daniel, C.; Victor, M.; Topouzelis, V.; Topouzelis, K. Finding plastic patches in coastal waters using optical satellite data. Sci. Rep. Nat. Res. 2020, 10, 5364. [Google Scholar]
- Maximenko, N.; Jan Hafner, J.; Niiler, P. Pathways of marine debris derived from trajectories of Lagrangian drifters. Mar. Pollut. Bull. 2012, 65, 51–62. [Google Scholar] [CrossRef]
- Zambianchi, E.; Trani, M.; Falco, P. Lagrangian transport of marine litter in the mediterranean sea. Front. Environ. Sci. 2017, 5, 5. [Google Scholar] [CrossRef] [Green Version]
- Nieto Borge, J.C.; Guedes Soares, C. Analysis of directional wave fields using X-band navigation radar. Coast. Eng. 2000, 40, 375–391. [Google Scholar] [CrossRef]
- Nieto Borge, J.C.; Rodríguez, G.R.; Hessner, K.; Gonzáles, P.I. Inversion of marine radar images for surface wave analysis. J. Atmos. Ocean. Technol. 2004, 21, 1291–1300. [Google Scholar] [CrossRef]
- Senet, C.M.; Seemann, J.; Flampouris, S.; Ziemer, F. Determination of bathymetric and current maps by the method DiSC based on the analysis of nautical X-Band radar image sequences of the sea surface. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2267–2279. [Google Scholar] [CrossRef]
- Serafino, F.; Lugni, C.; Soldovieri, F. A novel strategy for the surface current determination from marine X-band radar data. IEEE Geosci. Remote Sens. Lett. 2010, 7, 231–235. [Google Scholar] [CrossRef]
- Serafino, F.; Lugni, C.; Nieto Borge, J.C.; Zamparelli, V.; Soldovieri, F. Bathymetry determination via X-band radar data: A new strategy and numerical results. Sensors 2010, 10, 6522–6534. [Google Scholar] [CrossRef]
- Serafino, F.; Lugni, C.; Ludeno, G.; Arturi, D.; Uttieri, M.; Buonocore, B.; Zambianchi, E.; Budillon, G.; Soldovieri, F. REMOCEAN: A flexible X-band radar system for sea-state monitoring and surface current estimation. IEEE Geosci. Remote Sens. Lett. 2012, 9, 822–826. [Google Scholar] [CrossRef]
- Ludeno, G.; Brandini, C.; Lugni, C.; Arturi, D.; Natale, A.; Soldovieri, F.; Gozzini, B.; Serafino, F. Remocean system for the detection of the reflected waves from the costa Concordia ship wreck. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3011–3018. [Google Scholar] [CrossRef]
- Gwee, R.; Bushman, F. Detecting floating plastic using a high-frequency X-band Radar. Deltares 2020. Available online: https://publications.deltares.nl/11205287_018.pdf (accessed on 3 September 2021).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radar Parameter | Value |
|---|---|
| Peak power | 25 kW |
| Antenna length | 2.7 m |
| Radar scale | 0.98 NM |
| Antenna rotation period (Δt) | 2.4 s |
| Spatial image spacing (Δx and Δy) | 3.5 m |
| Antenna height | 13 m |
| View angular sector | 190°N |
| Materials Used |
|---|
| N. 5 plastic bottles (three 1.5 L bottles and two 0.5 L bottles) |
| N. 1 polystyrene box |
| N. 3 pieces of wood of different sizes |
| N. 2 women’s shoes |
| N. 1 aluminum spray can |
| N. 2 plastic jars |
| N. 3 different types of fishing net |
| N. 3 pieces of polyurethane foam |
| N. 1 plastic wrapping sheet |
| SGI Release Ranges | |
|---|---|
| Release 1 | 0.12 NM |
| Release 2 | 0.24 NM |
| Release 3 | 0.39 NM |
| Speed T0 and T1 (cm/s) | Speed T2 and T3 (cm/s) | Direction T0 (°) | Direction T1 (°) | Direction T2 and T3 (°) | |
|---|---|---|---|---|---|
| First release | 6 | 16 | 45 | 45 | 45 |
| Second release | 7 | 17 | 150 | 132 | 80 |
| Speed T0 (cm/s) | Speed T1 (cm/s) | Speed T2 (cm/s) | Direction T0 (°) | Direction T1 (°) | Direction T2 (°) | |
|---|---|---|---|---|---|---|
| Section 1 | 5 | 12 | 26 | 90 | 90 | 83 |
| Section 2 | 6 | 14 | 33 | 74 | 90 | 98 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serafino, F.; Bianco, A. Use of X-Band Radars to Monitor Small Garbage Islands. Remote Sens. 2021, 13, 3558. https://doi.org/10.3390/rs13183558
Serafino F, Bianco A. Use of X-Band Radars to Monitor Small Garbage Islands. Remote Sensing. 2021; 13(18):3558. https://doi.org/10.3390/rs13183558
Chicago/Turabian StyleSerafino, Francesco, and Andrea Bianco. 2021. "Use of X-Band Radars to Monitor Small Garbage Islands" Remote Sensing 13, no. 18: 3558. https://doi.org/10.3390/rs13183558
APA StyleSerafino, F., & Bianco, A. (2021). Use of X-Band Radars to Monitor Small Garbage Islands. Remote Sensing, 13(18), 3558. https://doi.org/10.3390/rs13183558