
Quality Evaluation of Digital Twins Generated Based on UAV Photogrammetry and TLS: Bridge Case Study

 ,
, 




Abstract
:
1. Introduction
Aims and Objectives
- Developing a systematic methodology for quality evaluation and the comparison of bridge size point clouds.
- Proposing ranges of general and specific evaluation approaches.
- Proving the soundness of the proposed methodology and approaches by evaluating and comparing two point clouds for a bridge case study.
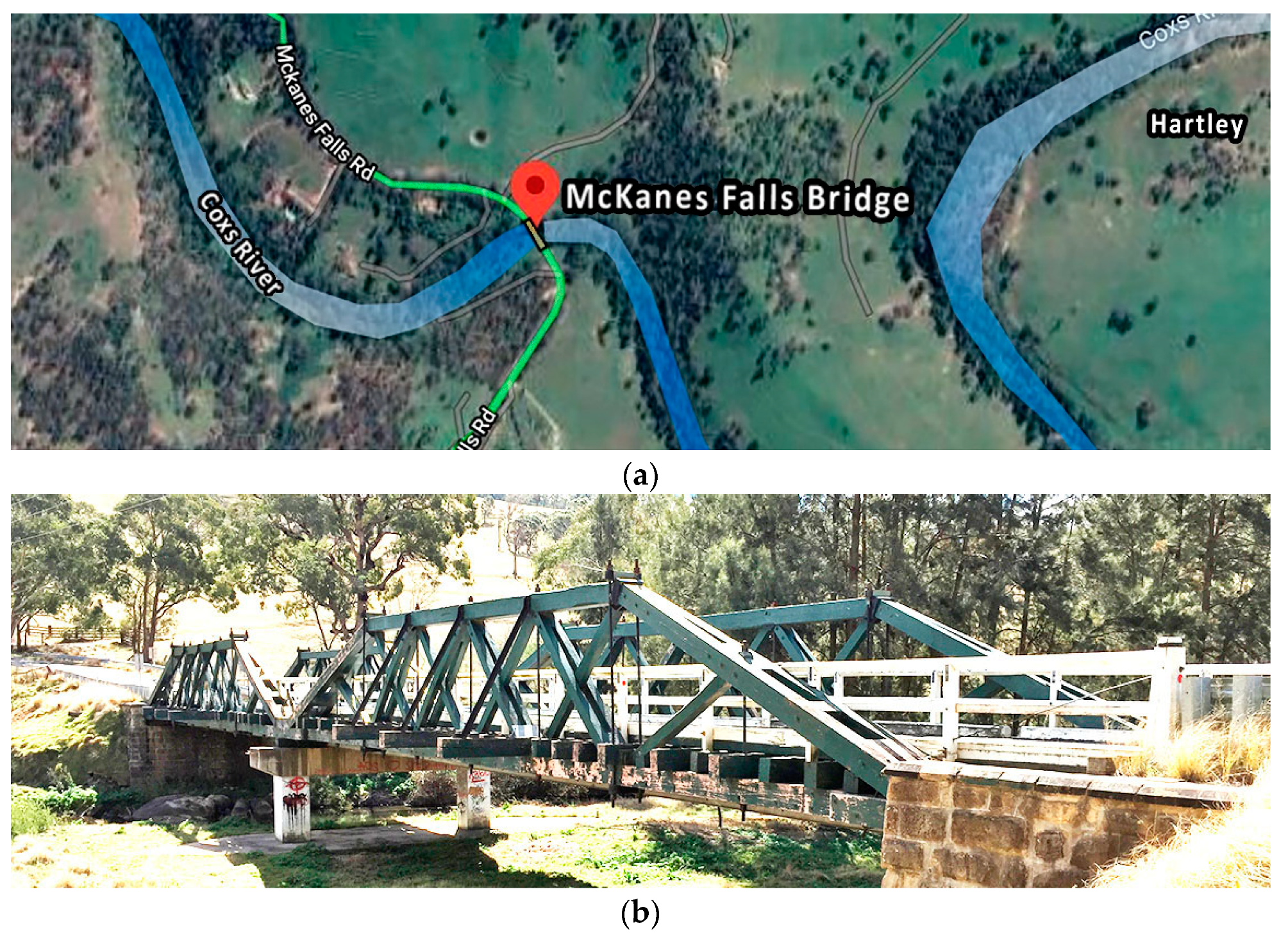
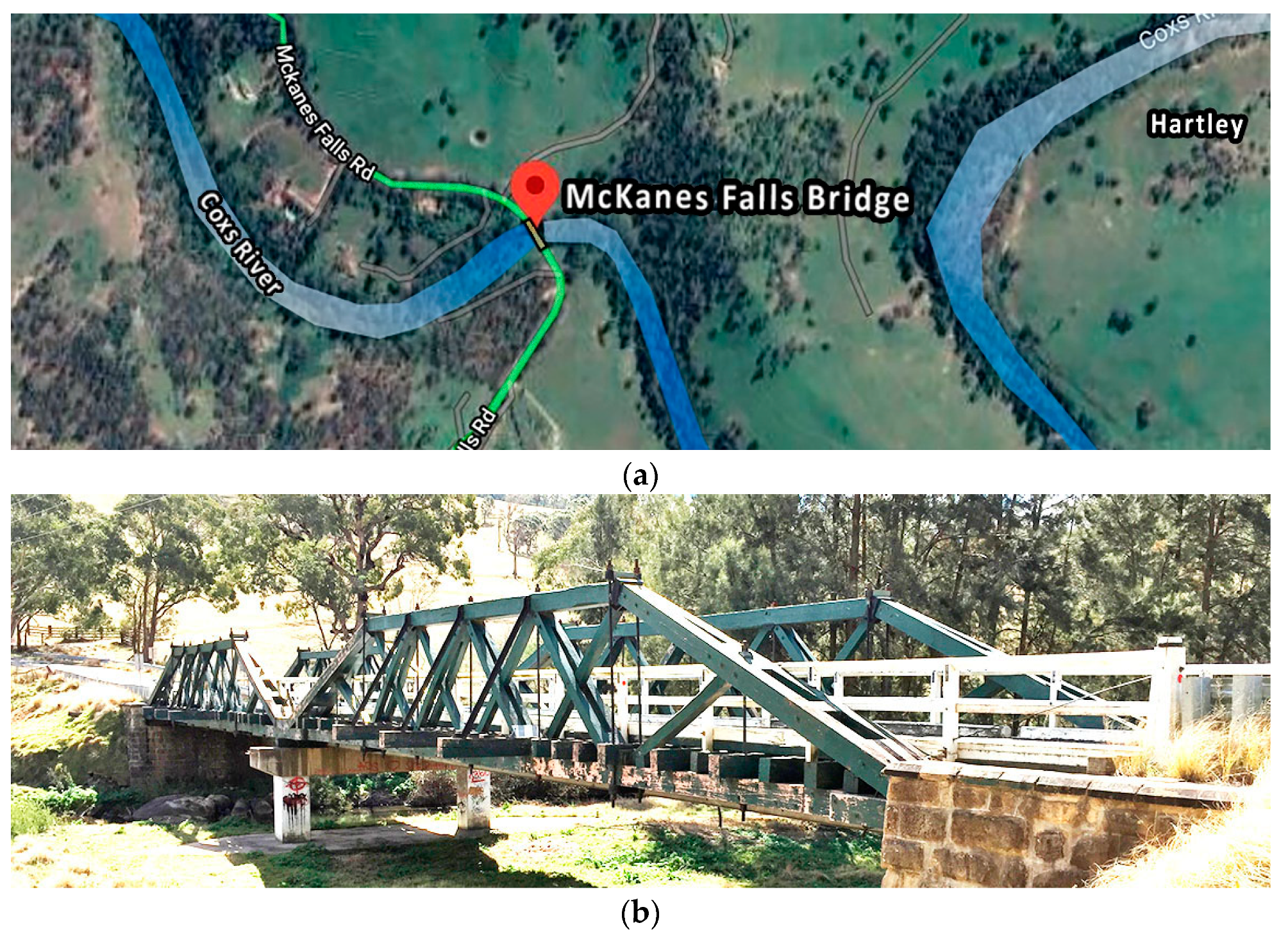
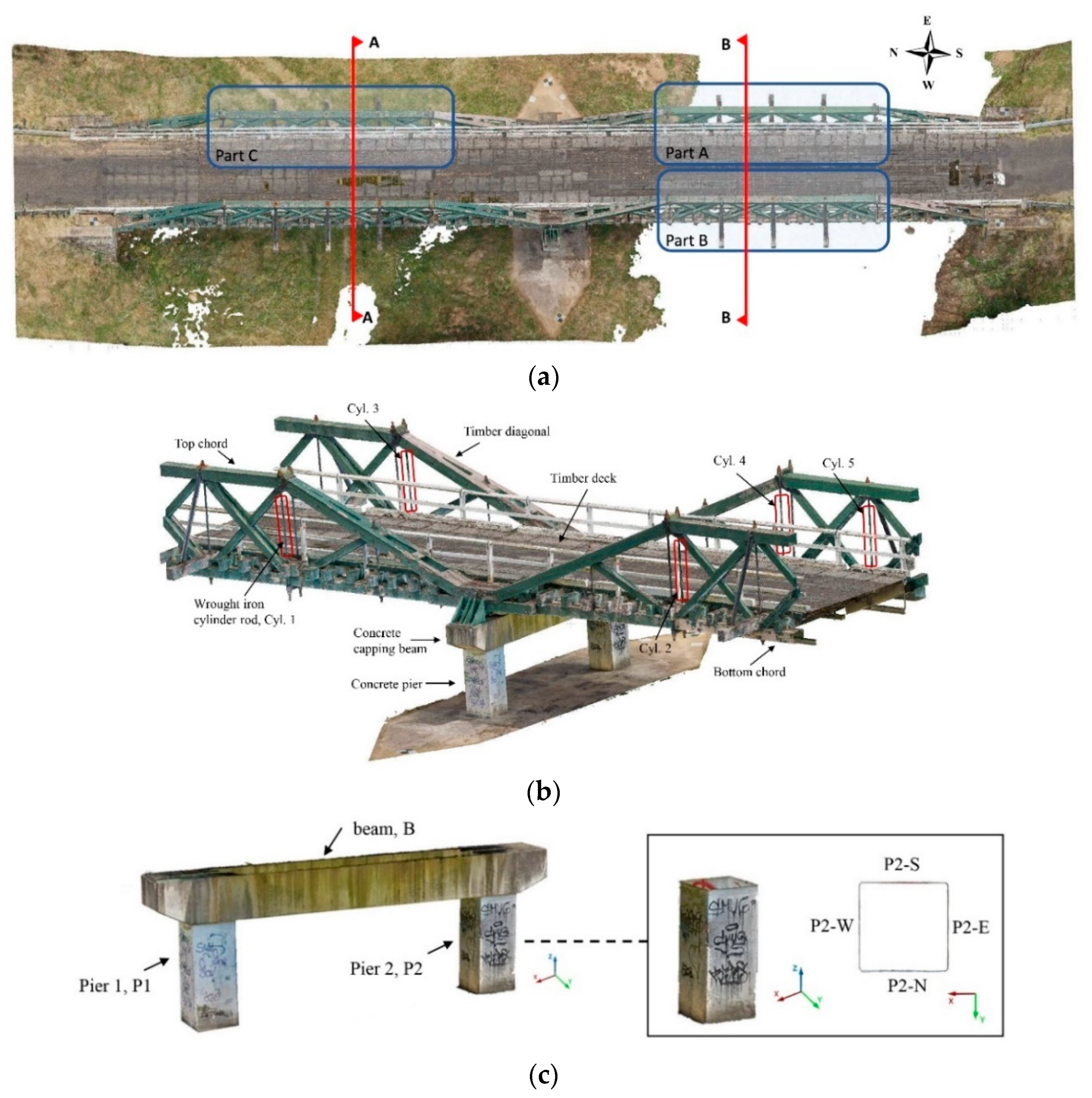
2. Bridge Case Study
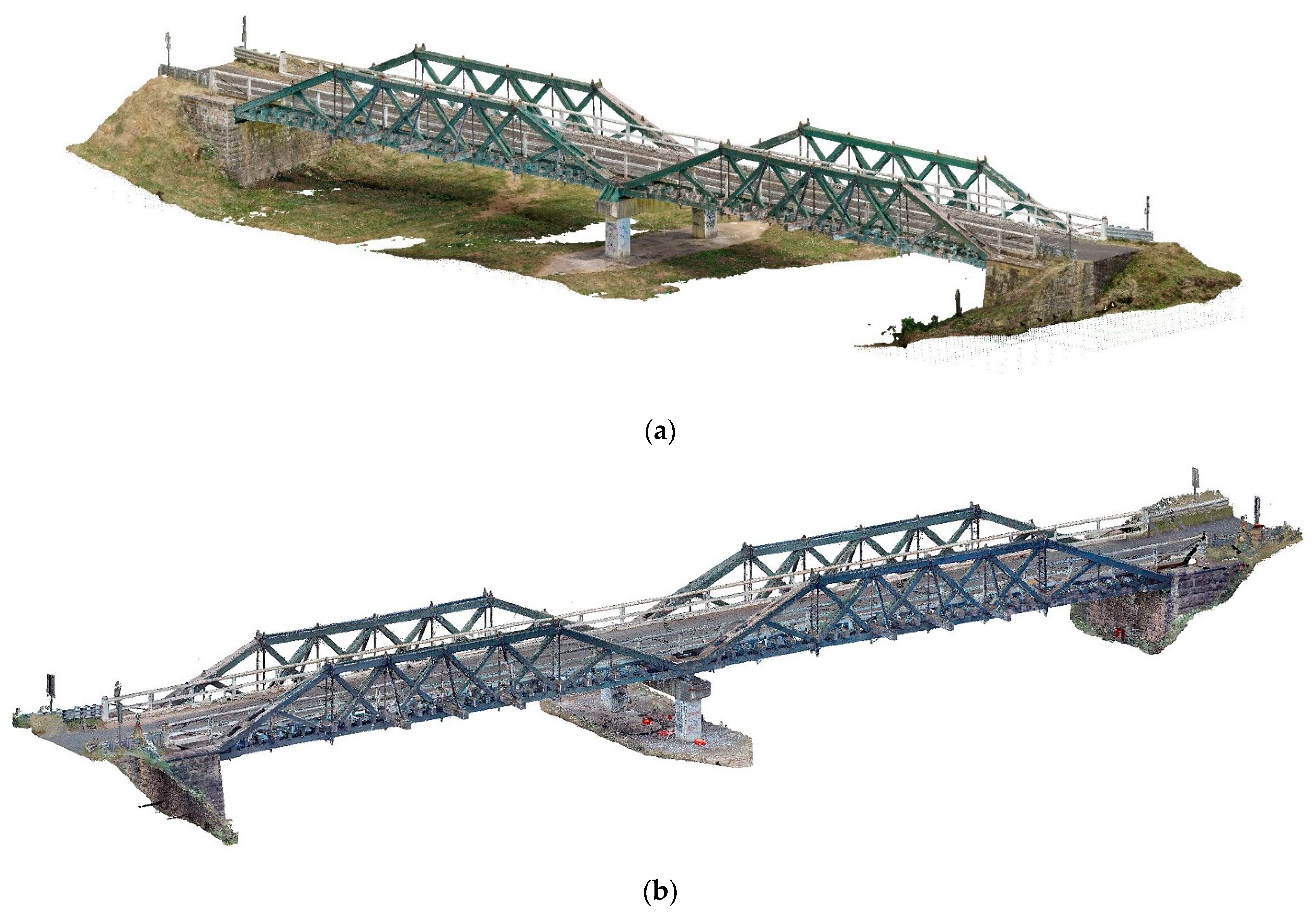
2.1. UAV Photogrammetry Survey
2.2. TLS Survey
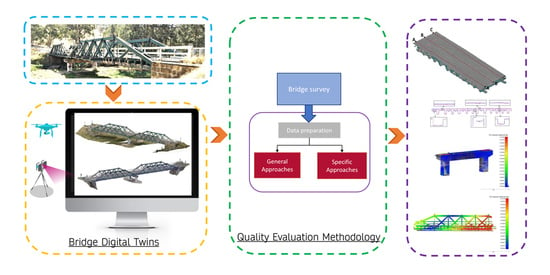
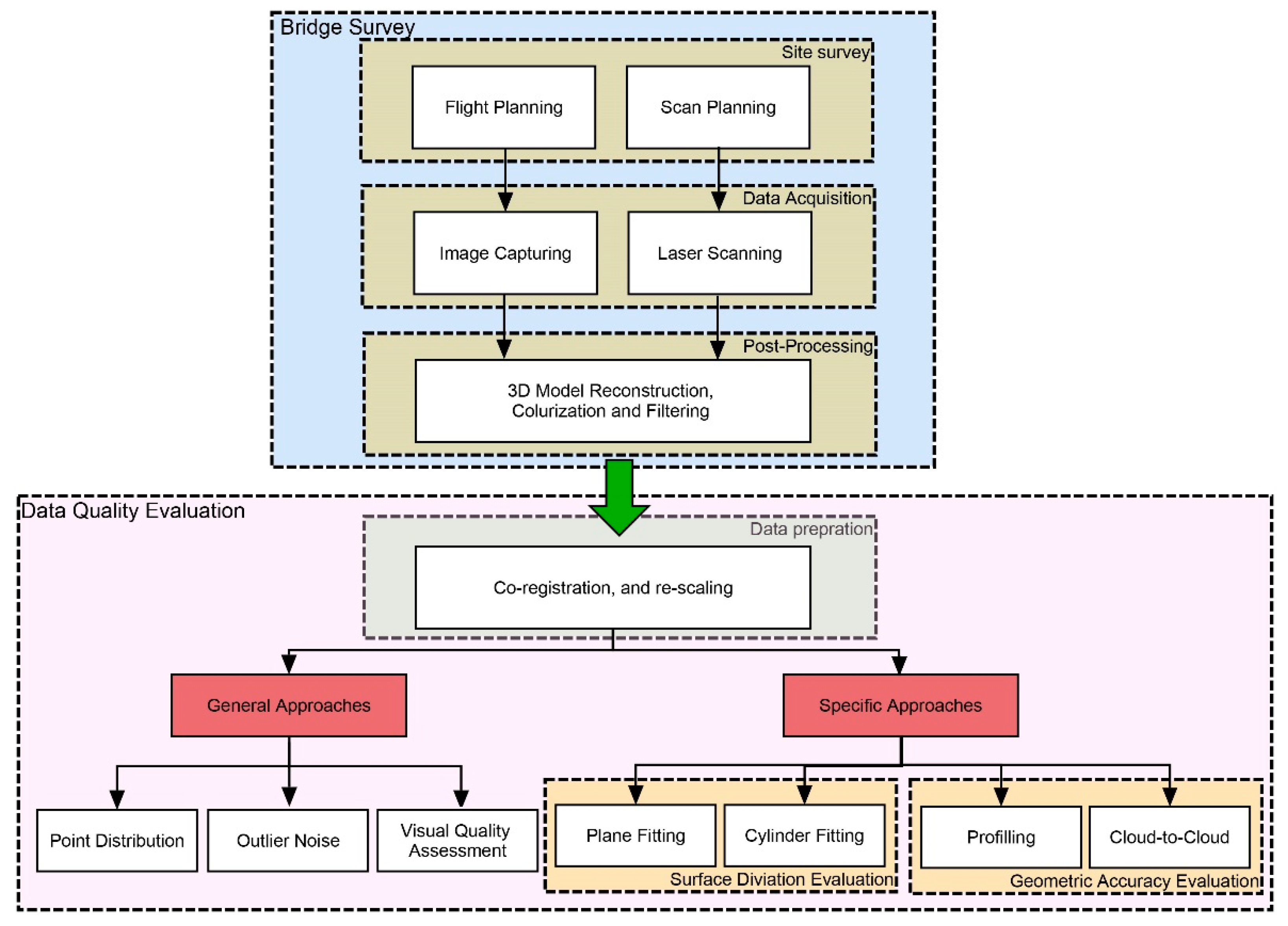
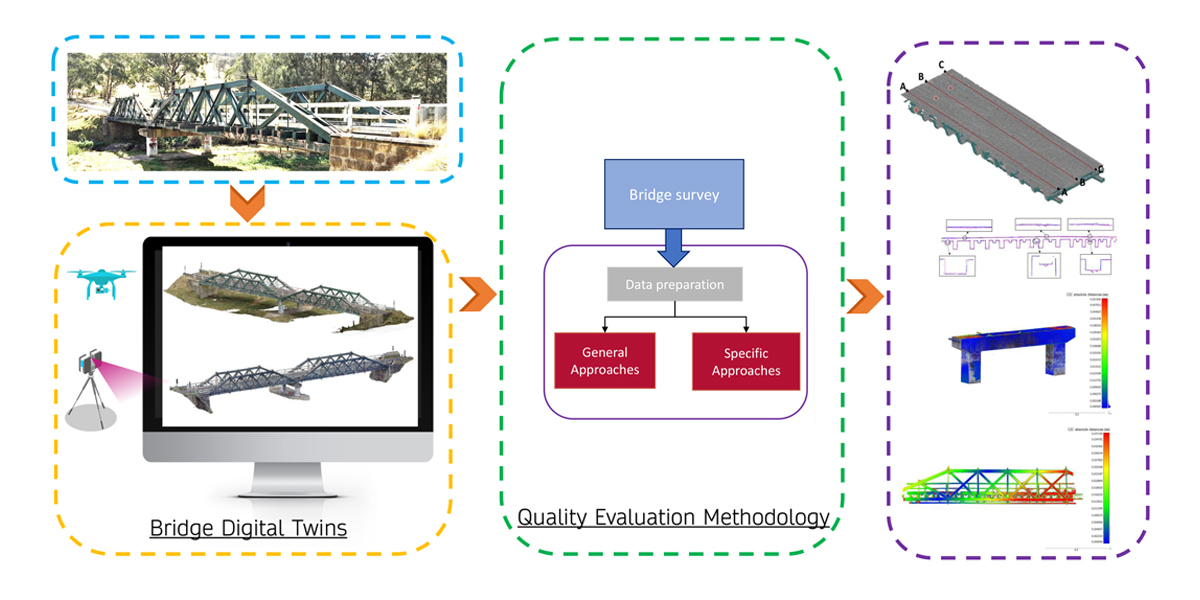
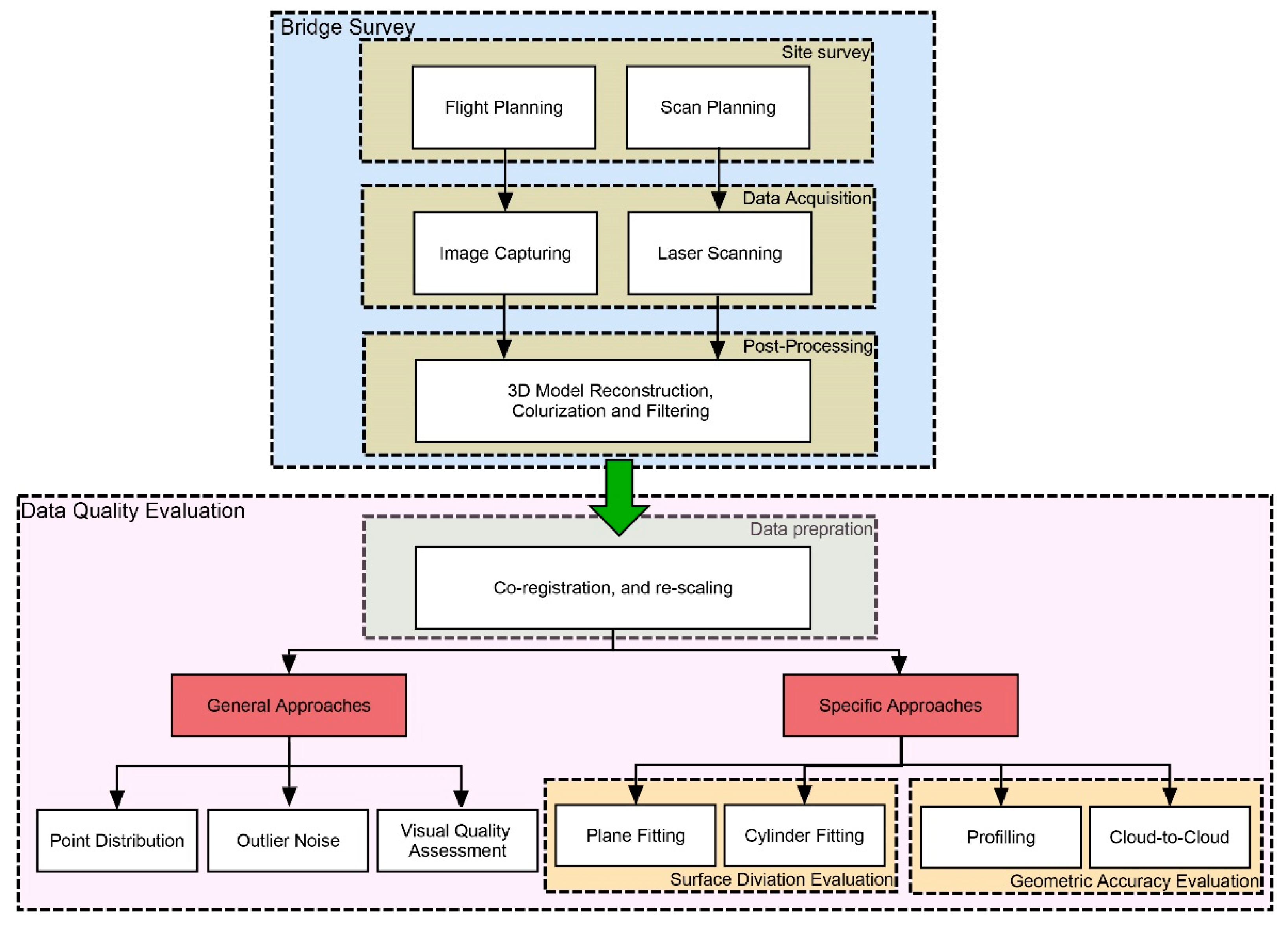
3. Quality Evaluation Methodology
3.1. General Approaches
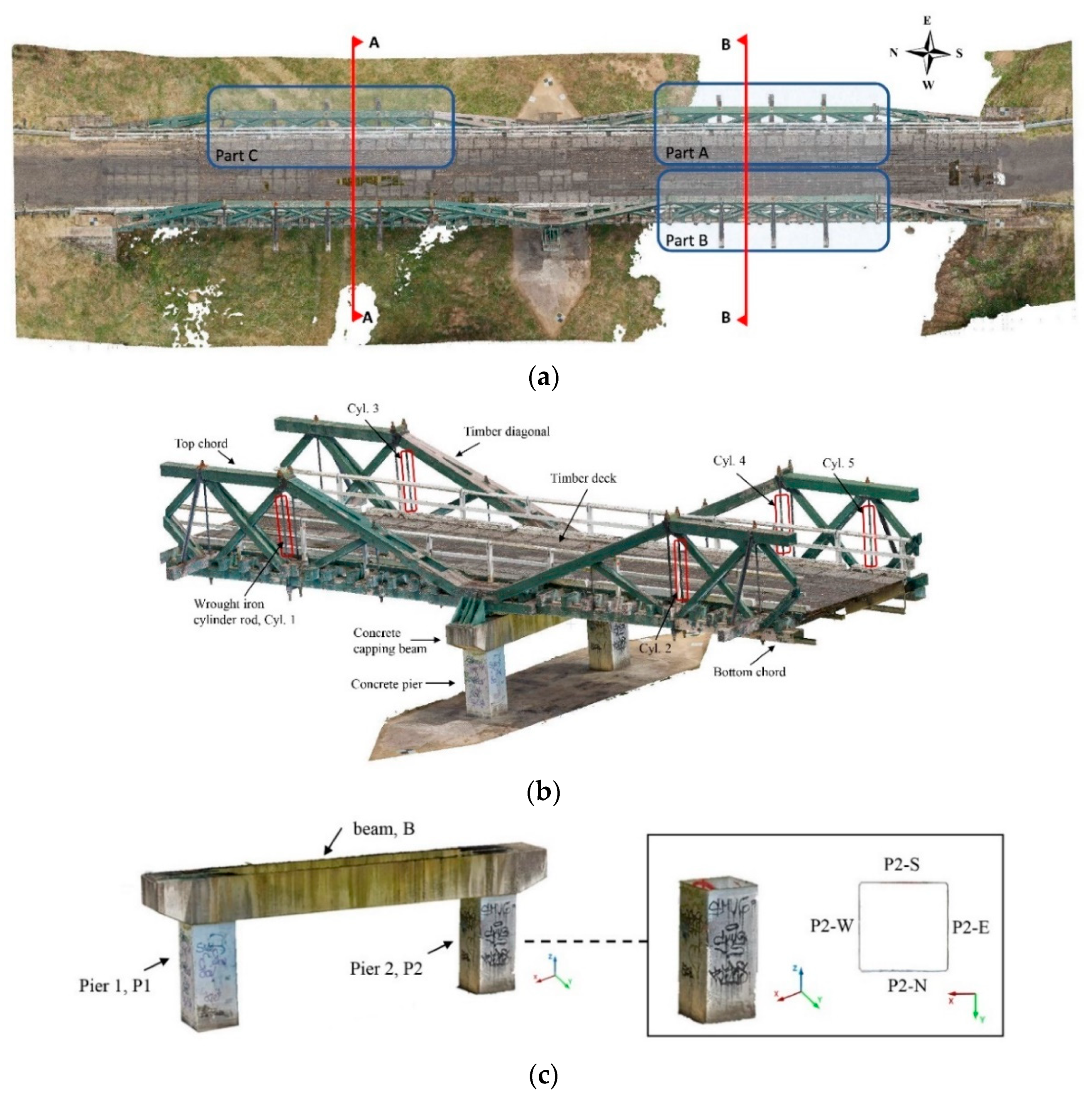
3.2. Specific Approaches
3.2.1. Surface Deviation Evaluation
3.2.2. Geometric Accuracy Evaluation
4. Results
4.1. General Approaches
4.1.1. Points Distribution
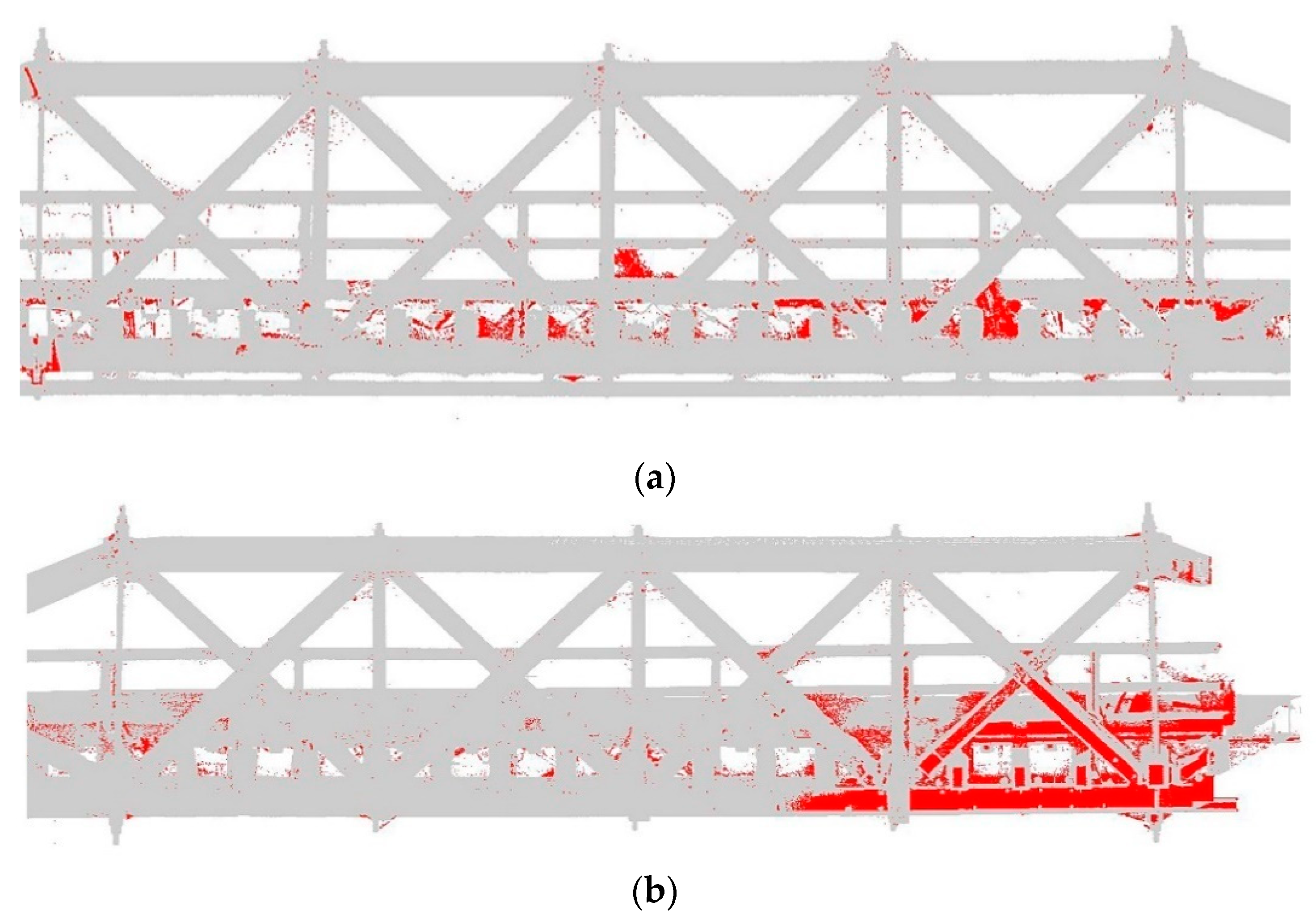
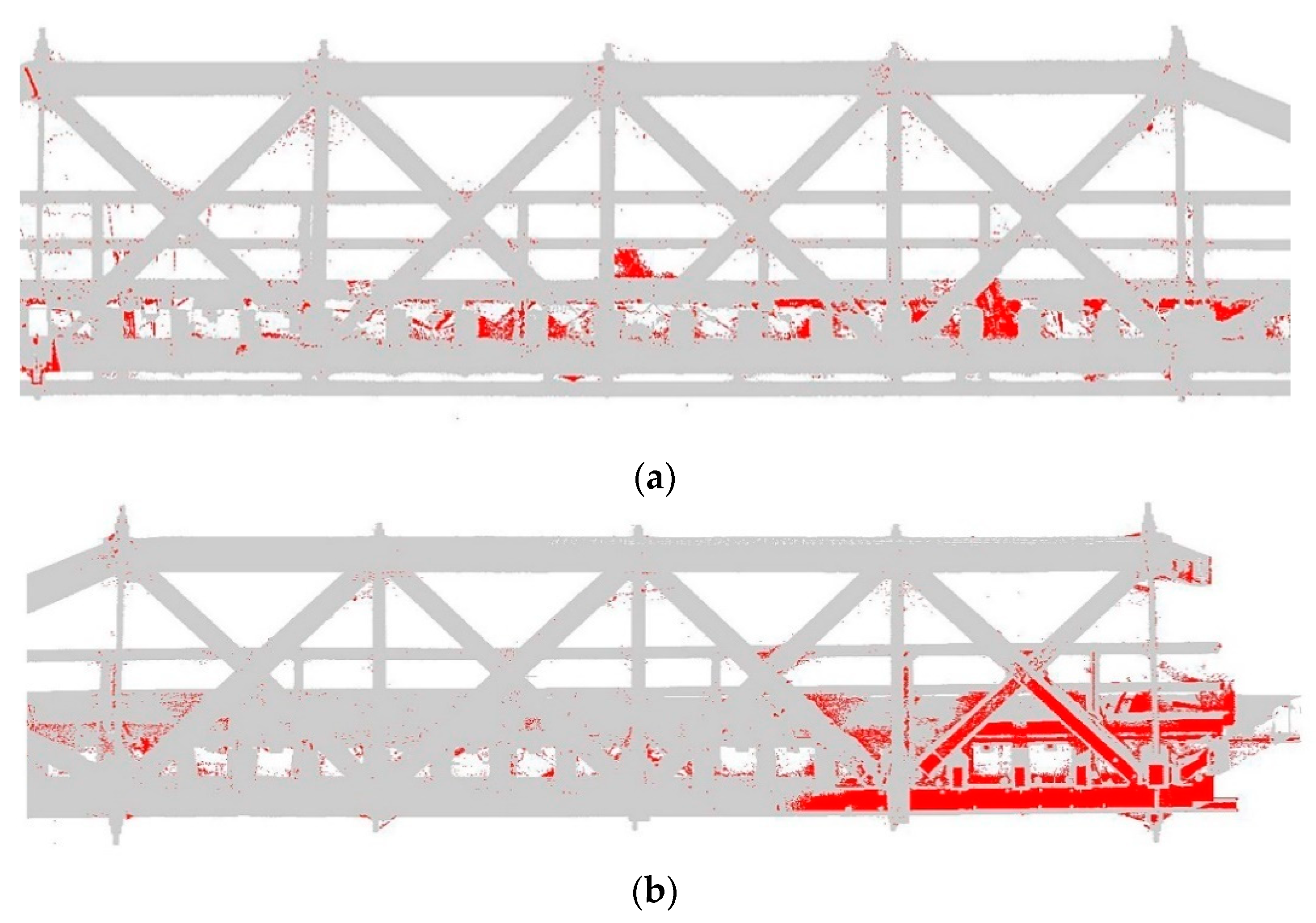
4.1.2. Outlier Noise
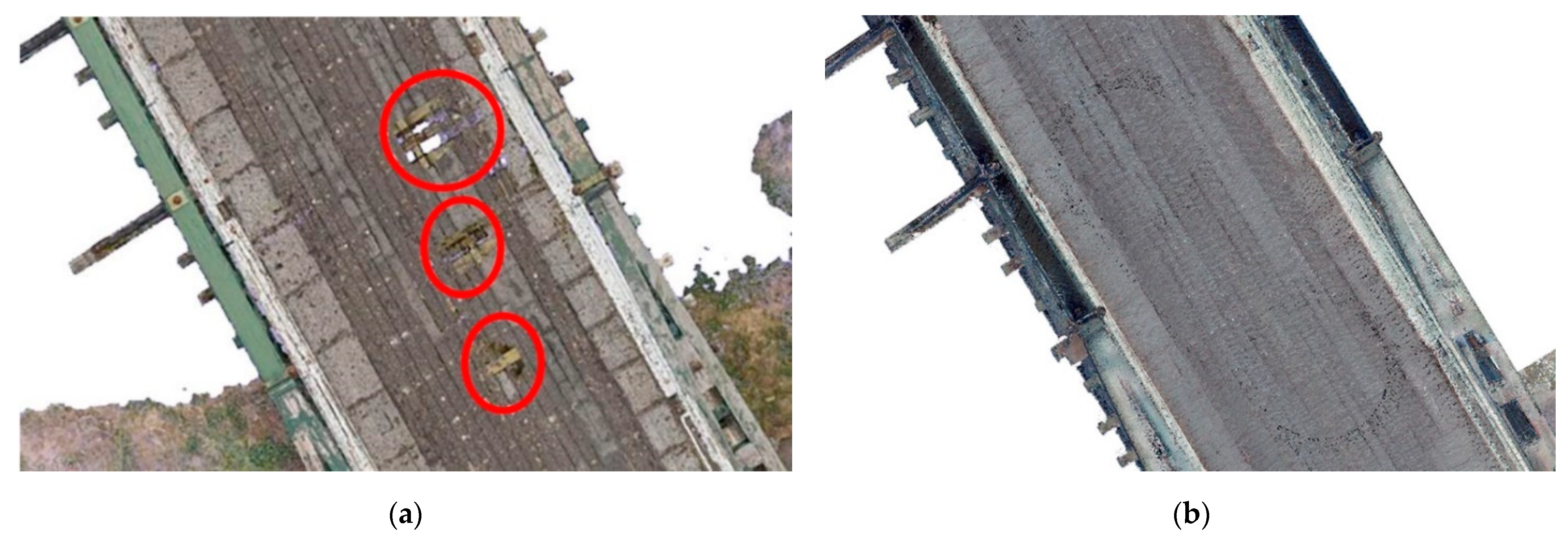
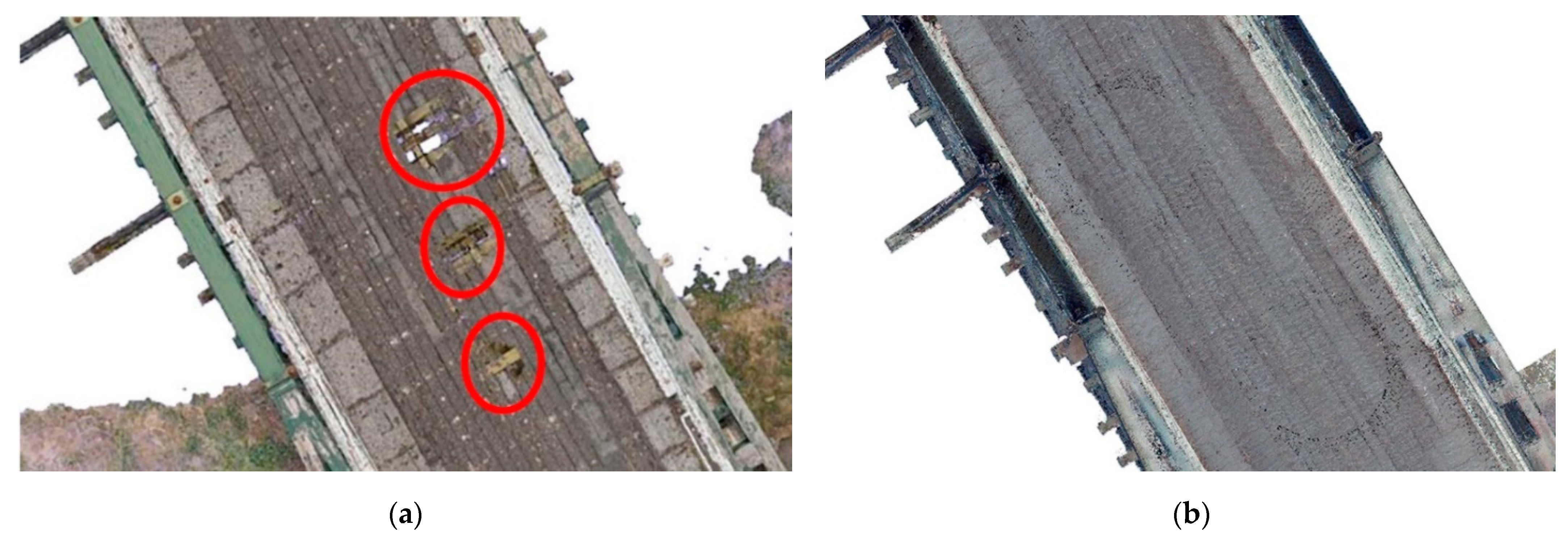
4.1.3. Visual Quality Assessment
4.2. Specific Approaches
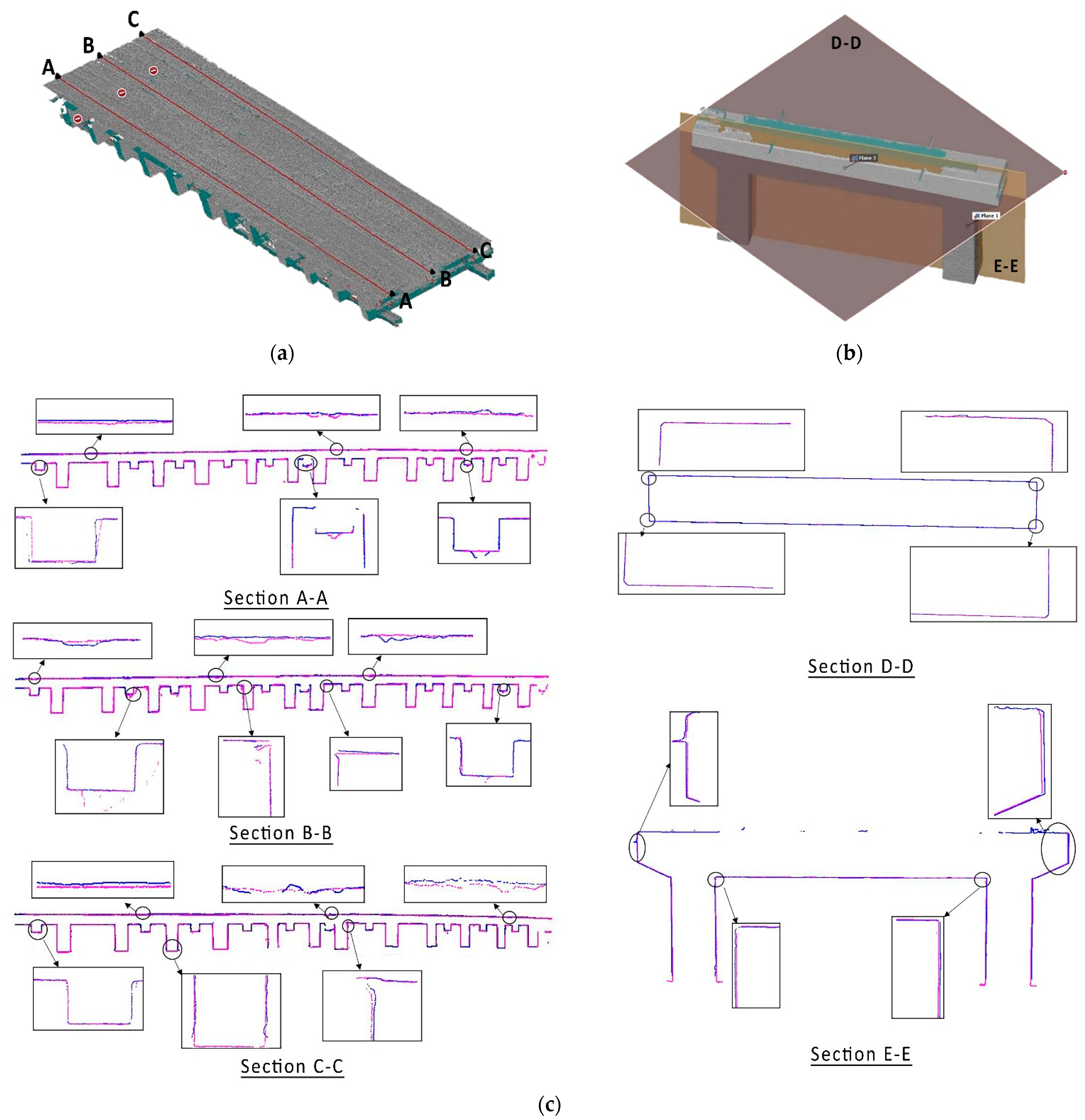
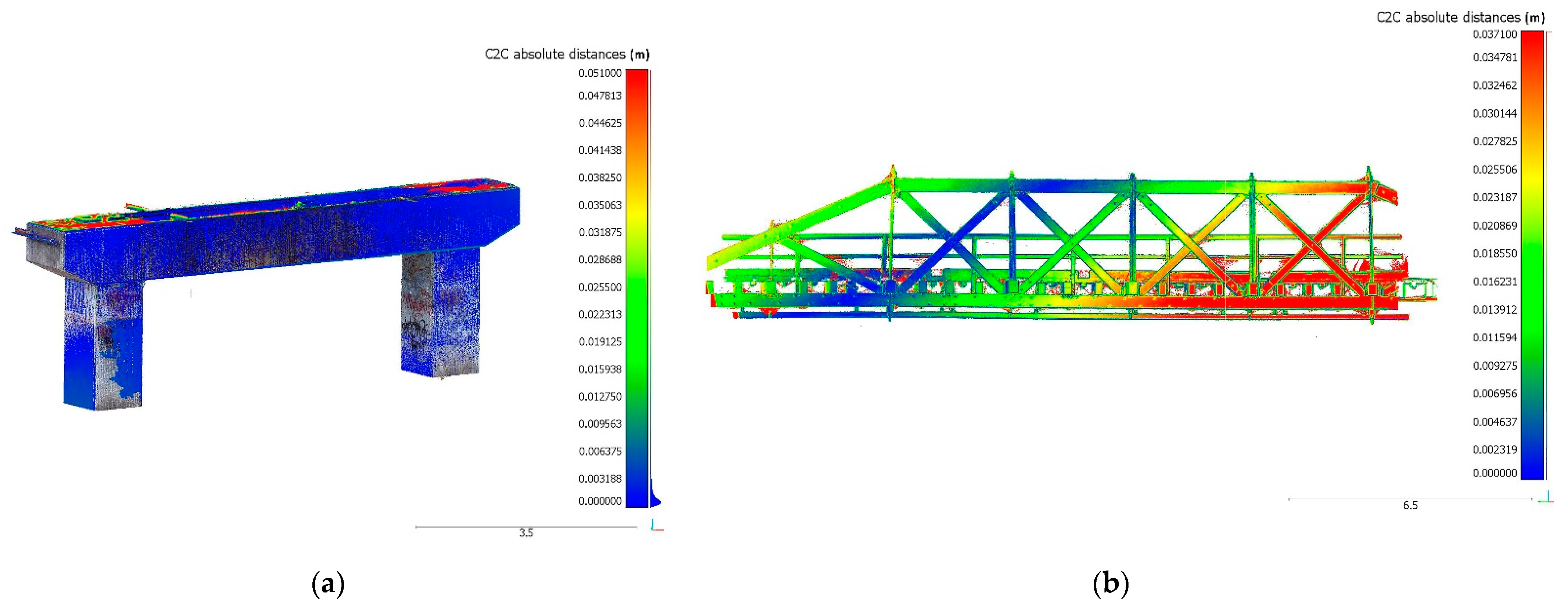
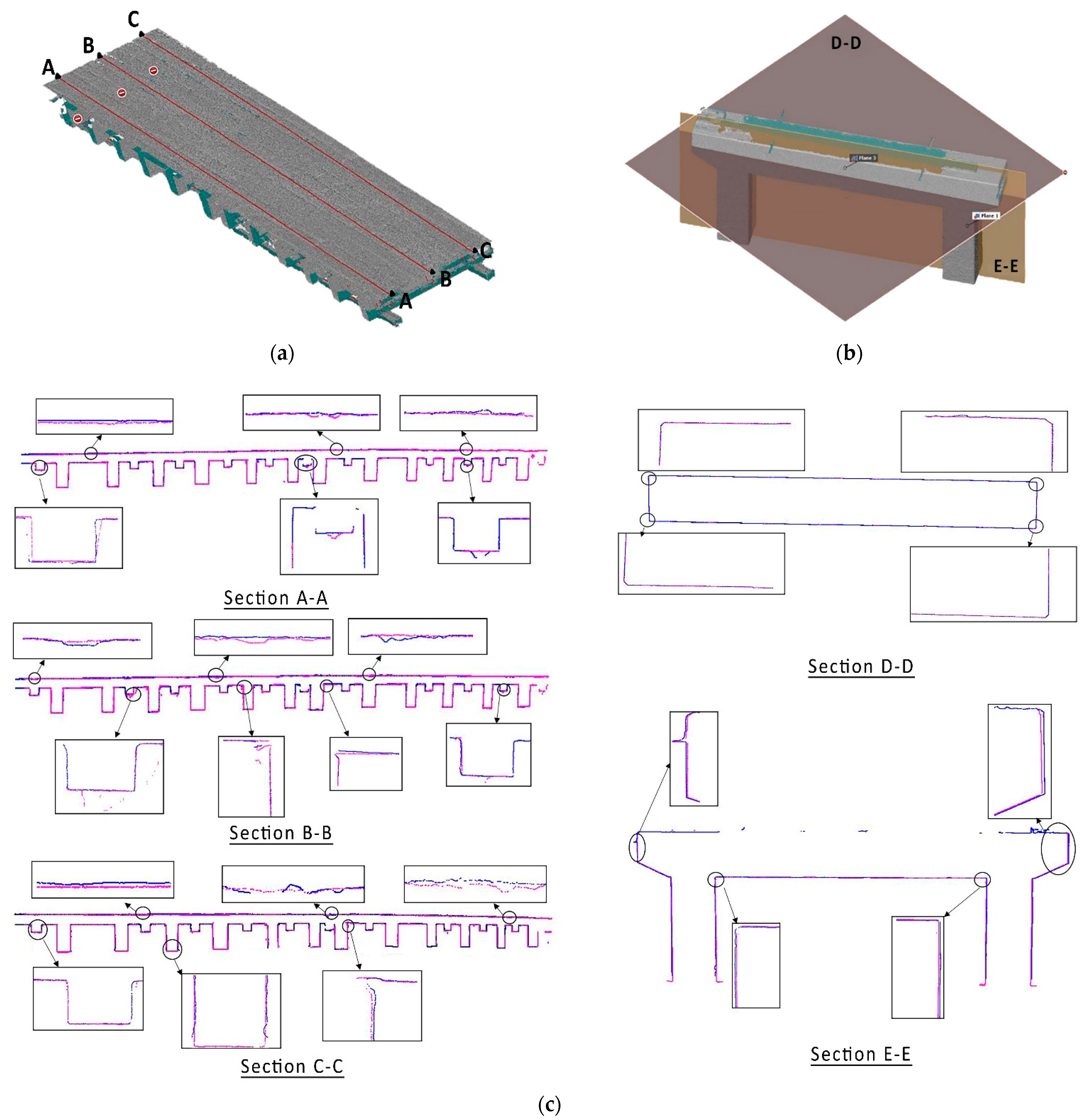
4.2.1. Surface Deviation Evaluation
4.2.2. Geometric Accuracy Evaluation
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rashidi, M.; Hoshyar, A.N.; Smith, L.; Bijan, S.; Siddique, R. A comprehensive taxonomy for structure and material deficiencies, preventions and remedies of timber bridges. J. Build. Eng. 2021, 34, 101624. [Google Scholar] [CrossRef]
- Horgan, R. Fatal Taiwan Bridge Collapse Is Latest Example of Maintenance Failings. Available online: https://www.newcivilengineer.com/latest/fatal-taiwan-bridge-collapse-is-latest-example-of-maintenance-failings-07-10-2019/ (accessed on 1 June 2021).
- Calvi, G.M.; Moratti, M.; O’Reilly, G.J.; Scattarreggia, N.; Monteiro, R.; Malomo, D.; Calvi, P.M.; Pinho, R. Once upon a Time in Italy: The Tale of the Morandi Bridge. Struct. Eng. Int. 2019, 29, 198–217. [Google Scholar] [CrossRef]
- Mohiuddin, A.K. Inspection, Rating and Health Monitoring Techniques; McGraw-Hill Education: New York, NY, USA, 2010. [Google Scholar]
- Chen, Q.; Jiang, W.; Meng, X.; Jiang, P.; Wang, K.; Xie, Y.; Ye, J. Vertical Deformation Monitoring of the Suspension Bridge Tower Using GNSS: A Case Study of the Forth Road Bridge in the UK. Remote Sens. 2018, 10, 364. [Google Scholar] [CrossRef] [Green Version]
- Kwiatkowski, J.; Anigacz, W.; Beben, D. Comparison of Non-Destructive Techniques for Technological Bridge Deflection Testing. Materials 2020, 13, 1908. [Google Scholar] [CrossRef]
- Villarino, A.; Riveiro, B.; Martínez-Sánchez, J.; Gonzalez-Aguilera, D. Successful Applications of Geotechnologies for the Evaluation of Road Infrastructures. Remote Sens. 2014, 6, 7800–7818. [Google Scholar] [CrossRef] [Green Version]
- Pourzeynali, S.; Zhu, X.; Ghari Zadeh, A.; Rashidi, M.; Samali, B. Comprehensive Study of Moving Load Identification on Bridge Structures Using the Explicit Form of Newmark-β Method: Numerical and Experimental Studies. Remote Sens. 2021, 13, 2291. [Google Scholar] [CrossRef]
- Feroz, S.; Abu Dabous, S. UAV-Based Remote Sensing Applications for Bridge Condition Assessment. Remote Sens. 2021, 13, 1809. [Google Scholar] [CrossRef]
- Dorafshan, S.; Maguire, M. Bridge inspection: Human performance, unmanned aerial systems and automation. J. Civ. Struct. Health Monit. 2018, 8, 443–476. [Google Scholar] [CrossRef] [Green Version]
- Rashidi, M.; Mohammadi, M.; Sadeghlou Kivi, S.; Abdolvand, M.M.; Truong-Hong, L.; Samali, B. A Decade of Modern Bridge Monitoring Using Terrestrial Laser Scanning: Review and Future Directions. Remote Sens. 2020, 12, 3796. [Google Scholar] [CrossRef]
- Opoku, D.-G.J.; Perera, S.; Osei-Kyei, R.; Rashidi, M. Digital twin application in the construction industry: A literature review. J. Build. Eng. 2021, 40, 102726. [Google Scholar] [CrossRef]
- Chen, S.; Laefer, D.F.; Mangina, E.; Iman Zolanvari, S.M.; Byrne, J. UAV Bridge Inspection through Evaluated 3D Reconstructions. J. Bridge Eng. 2019, 24, 05019001. [Google Scholar] [CrossRef] [Green Version]
- Jahanshahi, M.R.; Masri, S.F.; Sukhatme, G.S. Multi-image stitching and scene reconstruction for evaluating defect evolution in structures. Struct. Health Monit. 2011, 10, 643–657. [Google Scholar] [CrossRef] [Green Version]
- Rashidi, M.; Samali, B. Health Monitoring of Bridges Using RPAs. In EASEC16. Lecture Notes in Civil Engineering; Wang, C.M., Dao, V., Kitipornchai, S., Eds.; Springer: Singapore, 2021; Volume 101, pp. 209–218. [Google Scholar] [CrossRef]
- Dorafshan, S.; Thomas, R.J.; Coopmans, C.; Maguire, M. A Practitioner’s Guide to Small Unmanned Aerial Systems for Bridge Inspection. Infrastructures 2019, 4, 72. [Google Scholar] [CrossRef] [Green Version]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Fatigue Crack Detection Using Unmanned Aerial Systems in Fracture Critical Inspection of Steel Bridges. J. Bridge Eng. 2018, 23, 04018078. [Google Scholar] [CrossRef]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer: London, UK, 2011. [Google Scholar]
- Remondino, F.; Del Pizzo, S.; Kersten, T.P.; Troisi, S. Low-Cost and Open-Source Solutions for Automated Image Orientation—A Critical Overview. In Progress in Cultural Heritage Preservation, Proceedings of the 4th International Conference, EuroMed 2012, Limassol, Cyprus, 29 October–3 November 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 40–54. [Google Scholar]
- Seo, J.; Duque, L.; Wacker, J. Drone-enabled bridge inspection methodology and application. Autom. Constr. 2018, 94, 112–126. [Google Scholar] [CrossRef]
- Abolhasannejad, V.; Huang, X.; Namazi, N. Developing an Optical Image-Based Method for Bridge Deformation Measurement Considering Camera Motion. Sensors 2018, 18, 2754. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pan, Y.; Dong, Y.; Wang, D.; Chen, A.; Ye, Z. Three-Dimensional Reconstruction of Structural Surface Model of Heritage Bridges Using UAV-Based Photogrammetric Point Clouds. Remote Sens. 2019, 11, 1204. [Google Scholar] [CrossRef] [Green Version]
- Riveiro, B.; Lindenbergh, R. Laser Scanning: An Emerging Technology in Structural Engineering; CRC Press: Boca Raton, FL, USA, 2019; p. 270. [Google Scholar]
- Truong-Hong, L.; Laefer, D.F. Laser scanning for bridge inspection. In Laser Scanning: An Emerging Technology in Structural Engineering; CRC Press: Boca Raton, FL, USA, 2019; pp. 189–214. [Google Scholar]
- Fuchs, P.A.; Washer, G.A.; Chase, S.B.; Moore, M. Applications of Laser-Based Instrumentation for Highway Bridges. J. Bridge Eng. 2004, 9, 541–549. [Google Scholar] [CrossRef]
- Tang, P.; Akinci, B.; Garrett, J. Laser Scanning for Bridge Inspection and Management. In Proceedings of the IABSE Symposium: Improving Infrastructure Worldwide, Weimar, Germany, 19–21 September 2007; pp. 17–24. [Google Scholar]
- Tang, P.; Akinci, B. Automatic execution of workflows on laser-scanned data for extracting bridge surveying goals. Adv. Eng. Inform. 2012, 26, 889–903. [Google Scholar] [CrossRef]
- Mizoguchi, T.; Koda, Y.; Iwaki, I.; Wakabayashi, H.; Kobayashi, Y.; Shirai, K.; Hara, Y.; Lee, H.-S. Quantitative scaling evaluation of concrete structures based on terrestrial laser scanning. Autom. Constr. 2013, 35, 263–274. [Google Scholar] [CrossRef]
- Minehane, M.j.; O’Donovan, R.; Ruane, K.D.; O’Keeffe, B. The Use of 3D Laser Scanning Technology for Bridge Inspection and Assessment. In Proceedings of the Civil Engineering Research in Ireland, CERI, Belfast, Northen Ireland, 28–29 August 2014. [Google Scholar]
- Gyetvai, N.; Truong-Hong, L.; Laefer, D.F. Laser scan-based structural assessment of wrought iron bridges: Guinness Bridge, Ireland. Proc. Inst. Civ. Eng. Eng. Hist. Herit. 2018, 171, 76–89. [Google Scholar] [CrossRef] [Green Version]
- Gawronek, P.; Makuch, M. TLS Measurement during Static Load Testing of a Railway Bridge. ISPRS Int. J. Geo-Inf. 2019, 8, 44. [Google Scholar] [CrossRef] [Green Version]
- Conde-Carnero, B.; Riveiro, B.; Arias, P.; Caamaño, J.C. Exploitation of geometric data provided by laser scanning to create FEM structural models of bridges. J. Perform. Constr. Facil. 2016, 30, 04015053. [Google Scholar] [CrossRef]
- Ziolkowski, P.; Szulwic, J.; Miskiewicz, M. Deformation Analysis of a Composite Bridge during Proof Loading Using Point Cloud Processing. Sensors 2018, 18, 4332. [Google Scholar] [CrossRef] [Green Version]
- Mill, T.; Ellmann, A.; Kiisa, M.; Idnurm, J.; Idnurm, S.; Horemuž, M.; Aavik, A. Geodetic monitoring of bridge deformations occurring during static load testing. Balt. J. Road Bridge Eng. 2015, 10, 17–27. [Google Scholar] [CrossRef] [Green Version]
- Laefer, D.F.; Truong-Hong, L. Toward automatic generation of 3D steel structures for building information modelling. Autom. Constr. 2017, 74, 66–77. [Google Scholar] [CrossRef]
- Javidan, M.M.; Kim, J. Fuzzy-based method for efficient seismic performance evaluation of structures with uncertainty. Comput. Aided Civ. Infrastruct. Eng. 2021. [Google Scholar] [CrossRef]
- Kim, H.; Kim, C. Deep-Learning-Based Classification of Point Clouds for Bridge Inspection. Remote Sens. 2020, 12, 3757. [Google Scholar] [CrossRef]
- Rashidi, M.; Ghodrat, M.; Samali, B.; Mohammadi, M. Decision Support Systems. In Management of Information Systems; IntechOpen: London, UK, 2018. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Rashidi, M.; Samali, B.; Mohammadi, M.; Nguyen, A. Computer vision-based classification of cracks on concrete bridges using machine learning techniques. In Proceedings of the 10th International Conference on Structural Health Monitoring of Intelligent Infrastructure, SHMII 10, Porto, Portugal, 30 June–2 July 2021. [Google Scholar]
- Lu, R.; Rausch, C.; Bolpagni, M.; Brilakis, I.; Haas, C.T. Geometric Accuracy of Digital Twins for Structural Health Monitoring; IntechOpen: London, UK, 2020. [Google Scholar] [CrossRef]
- Kubota, S.; Ho, C.; Nishi, K. construction and usage of three-dimensional data for road structures using terrestrial laser scanning and uav with photogrammetry. In Proceedings of the 36th International Symposium on Automation and Robotics in Construction (ISARC), Banff, AB, Canada, 21–24 May 2019; pp. 136–143. [Google Scholar]
- Moon, D.; Chung, S.; Kwon, S.; Seo, J.; Shin, J. Comparison and utilization of point cloud generated from photogrammetry and laser scanning: 3D world model for smart heavy equipment planning. Autom. Constr. 2019, 98, 322–331. [Google Scholar] [CrossRef]
- Mohammadi, M.; Rashidi, M.; Mousavi, V.; Karami, A.; Yu, Y.; Samali, B. Case study on accuracy comparison of digital twins developed for a heritage bridge via UAV photogrammetry and terrestrial laser scanning. In Proceedings of the 10th International Conference on Structural Health Monitoring of Intelligent Infrastructure, SHMII 10, Porto, Portugal, 30 June–2 July 2021. [Google Scholar]
- Fraser, D. Nomination for McKanes Falls Bridge over Cox’s River Near Lithgow, NSW as an Historic Engineering Marker; Engineers Australia: Sydney, Australia, 2001. [Google Scholar]
- Gorji Azandariani, M.; Rousta, A.M.; Mohammadi, M.; Rashidi, M.; Abdolmaleki, H. Numerical and analytical study of ultimate capacity of steel plate shear walls with partial plate-column connection (SPSW-PC). Structures 2021, 33, 3066–3080. [Google Scholar] [CrossRef]
- Mohammadi, M.; Kafi, M.A.; Kheyroddin, A.; Ronagh, H.R.; Rashidi, M. Experimental and Numerical Investigation of Innovative Composite Buckling-Restrained Fuse. ACMSM25 Lect. Notes Civ. Eng. 2020, 37, 113–121. [Google Scholar] [CrossRef]
- Javidan, M.M.; Kim, J. Steel hysteretic column dampers for seismic retrofit of soft first story structures. Steel Compos. Struct. 2020, 37, 259–272. [Google Scholar] [CrossRef]
- Gorji Azandariani, M.; Gholhaki, M.; Kafi, M.A.; Zirakian, T. Study of effects of beam-column connection and column rigidity on the performance of SPSW system. J. Build. Eng. 2021, 33, 101821. [Google Scholar] [CrossRef]
- Roads and Maritime Services. McKanes Bridge Upgrade, Review of Environmental Factors; NSW Roads and Maritime Services: Sydney, Australia, 2019; p. 2.
- Bentley Systems Company. ContextCapture Software; Bentley Systems Company: Exton, PA, USA, 2021. [Google Scholar]
- Leica Geosystems Company. Leica ScanStation P50/P40/P30, Laser Scanner User Manual; Leica Geosystems Company: Heerbrugg, Switzerland, 2018. [Google Scholar]
- Verein Deutscher Ingenieure; Verband Der Elektrotechnik. VDI/VDE 2634 BLATT 3, Optical 3D-Measuring Systems—Multiple View Systems Based on Area Scanning; Engl. VDI/VDE-Gesellschaft Mess- und Automatisierungstechnik: Düsseldorf, Germany, 2008. [Google Scholar]
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Huang, H.; Li, D.; Zhang, H.; Ascher, U.; Cohen-Or, D. Consolidation of unorganized point clouds for surface reconstruction. ACM Trans. Graph. 2009, 28, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Salgado, C.M.; Azevedo, C.; Proença, H.; Vieira, S.M. Noise Versus Outliers. In Secondary Analysis of Electronic Health Records; Springer International Publishing: Cham, Switzerland, 2016; pp. 163–183. [Google Scholar]
- Karami, A.; Menna, F.; Remondino, F. Investigating 3d Reconstruction Of Non-Collaborative Surfaces Through Photogrammetry And Photometric Stereo. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 519–526. [Google Scholar] [CrossRef]
- Uchida, T.; Hasegawa, K.; Li, L.; Adachi, M.; Yamaguchi, H.; Thufail, F.I.; Riyanto, S.; Okamoto, A.; Tanaka, S. Noise-robust transparent visualization of large-scale point clouds acquired by laser scanning. ISPRS J. Photogramm. Remote Sens. 2020, 161, 124–134. [Google Scholar] [CrossRef]
- Wang, Y. Outlier Formation and Removal in 3D Laser Scanned Point Clouds. Ph.D. Thesis, The University of British Columbia, Vancouver, BC, Canada, 2014. [Google Scholar]
- Verein Deutscher Ingenieure; Verband Der Elektrotechnik. VDI/VDE 2634 BLATT 2, Optical 3D-Measuring Systems—Optical Systems Based on Area Scanning; Engl. VDI/VDE-Gesellschaft Mess- und Automatisierungstechnik: Düsseldorf, Germany, 2012. [Google Scholar]
- Hosseininaveh Ahmadabadian, A.; Karami, A.; Yazdan, R. An automatic 3D reconstruction system for texture-less objects. Robot. Auton. Syst. 2019, 117, 29–39. [Google Scholar] [CrossRef]
- Essa, K.S. New fast least-squares algorithm for estimating the best-fitting parameters due to simple geometric-structures from gravity anomalies. J. Adv. Res. 2014, 5, 57–65. [Google Scholar] [CrossRef] [Green Version]
- Mousavi, V.; Khosravi, M.; Ahmadi, M.; Noori, N.; Haghshenas, S.; Hosseininaveh, A.; Varshosaz, M. The performance evaluation of multi-image 3D reconstruction software with different sensors. Measurement 2018, 120, 1–10. [Google Scholar] [CrossRef]
- Rabbani, T. Automatic Reconstruction of Industrial Installations Using Point Clouds and Images; NCG, Nederlandse Commissie Voor Geodesie, Netherlands Geodetic Commission: Delft, The Netherlands, 2006. [Google Scholar]
- Koutsoudis, A.; Vidmar, B.; Ioannakis, G.; Arnaoutoglou, F.; Pavlidis, G.; Chamzas, C. Multi-image 3D reconstruction data evaluation. J. Cult. Herit. 2014, 15, 73–79. [Google Scholar] [CrossRef]
- Rockafellar, R.T.; Wets, R.J.-B. Variational Analysis; Springer: Berlin/Heidelberg, Germany, 1998; p. 736. [Google Scholar]
- Ahmadabadian, A.H.; Yazdan, R.; Karami, A.; Moradi, M.; Ghorbani, F. Clustering and selecting vantage images in a low-cost system for 3D reconstruction of texture-less objects. Measurement 2017, 99, 185–191. [Google Scholar] [CrossRef]
- Ahmad Fuad, N.; Yusoff, A.R.; Ismail, Z.; Majid, Z. Comparing the performance of point cloud registration methods for landslide monitoring using mobile laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 11–21. [Google Scholar] [CrossRef] [Green Version]
- Girardeau-Montaut, D. CloudCompare Software; 2006; Available online: https://www.danielgm.net/cc/ (accessed on 1 June 2021).
- Mousavi, V.; Varshosaz, M.; Remondino, F. Using Information Content to Select Keypoints for UAV Image Matching. Remote Sens. 2021, 13, 1302. [Google Scholar] [CrossRef]
- Gärtner, H.; Wagner, B.; Heinrich, I.; Denier, C. 3D-laser scanning: A new method to analyze coarse tree root systems. For. Snow Landsc. Res. 2009, 82, 95–106. [Google Scholar]
- GOM Gmbh Company. Gom Inspect Suite Software; GOM Gmbh Company: Braunschweig, Germany, 2020; Available online: https://www.gom.com/en/products/gom-suite/gom-inspect-pro?gclid=EAIaIQobChMI_43d-Z3f8gIVSteWCh2ltQ9MEAAYAyAAEgKGd_D_BwE (accessed on 1 June 2021).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plane | Selected Area (m2) | UAV-Based Photogrammetry | TLS | ||
|---|---|---|---|---|---|
| Number of Points | Density (P/cm2) | Number of Points | Density (P/cm2) | ||
| P1-N | 2.12 | 504,013 | 24 | 921,011 | 43 |
| P1-W | 2.11 | 504,902 | 24 | 606,975 | 29 |
| P1-S | 2.00 | 104,235 | 5 | 1,056,905 | 53 |
| P1-E | 1.99 | 374,667 | 19 | 1,014,998 | 51 |
| P2-N | 2.03 | 482,906 | 24 | 904,120 | 45 |
| P2-W | 1.97 | 471,907 | 24 | 730,039 | 37 |
| P2-S | 2.04 | 336,240 | 16 | 976,529 | 48 |
| P2-E | 1.96 | 442,194 | 23 | 575,410 | 29 |
| B-N | 4.63 | 1,153,831 | 25 | 2,334,752 | 50 |
| B-S | 5.28 | 1,123,152 | 21 | 962,805 | 18 |
| Average | 2.61 | 549,805 | 21 | 1,008,355 | 39 |
| Reference Objects Part | λ′ (mm) | β′ (mm) | α′ (mm) | Number of Points | Number of Outlier Points | Outlier Noise (%) |
|---|---|---|---|---|---|---|
| A | 0.50 | 7.90 | 16.30 | 226,257,806 | 5,328,371 | 2.35% |
| B | 0.39 | 7.13 | 14.70 | 249,620,401 | 3,896,574 | 1.56% |
| C | 2.00 | 20.00 | 42.00 | 156,609,279 | 4,991,137 | 3.18% |
| Average | 2.36% | |||||
| Plane | UAV Based Photogrammetry | TLS | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| STD | Mean Distance | Max Distance | RMSE | MAE | STD | Mean Distance | Max Distance | RMSE | MAE | |
| P1-N | 2.13 | 0.59 | 7.93 | 3.13 | 2.47 | 1.37 | 0.13 | 8.54 | 1.37 | 1.10 |
| P1-W | 1.67 | 0.33 | 7.86 | 1.67 | 1.08 | 1.16 | 0.07 | 8.73 | 1.16 | 10.00 |
| P1-S | 1.35 | 0.20 | 7.96 | 1.35 | 2.30 | 1.77 | 0.30 | 8.50 | 1.77 | 1.20 |
| P1-E | 2.60 | 0.40 | 7.92 | 2.60 | 2.02 | 1.92 | 0.20 | 8.40 | 1.92 | 1.60 |
| P2-N | 1.28 | 0.19 | 8.18 | 1.28 | 1.00 | 1.36 | 0.12 | 8.68 | 1.36 | 1.00 |
| P2-W | 1.50 | 0.10 | 8.08 | 1.50 | 1.00 | 1.55 | 0.15 | 8.40 | 1.55 | 1.20 |
| P2-S | 2.32 | 0.30 | 8.06 | 2.30 | 1.70 | 1.31 | 0.10 | 8.80 | 1.31 | 1.00 |
| P2-E | 1.96 | 0.20 | 8.07 | 1.96 | 1.60 | 1.94 | 0.10 | 8.80 | 1.94 | 1.60 |
| B-N | 1.97 | 0.10 | 14.10 | 1.90 | 1.47 | 2.11 | 0.13 | 17.00 | 2.13 | 1.95 |
| B-S | 1.90 | 0.10 | 14.34 | 1.90 | 1.49 | 1.67 | 0.41 | 20.77 | 1.67 | 1.30 |
| Average | 1.80 | 0.25 | 9.25 | 1.96 | 1.61 | 1.62 | 0.17 | 10.66 | 1.62 | 1.29 |
| Plane | UAV Based Photogrammetry | TLS | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| STD | Mean Distance | Max Distance | RMSE | MAE | STD | Mean Distance | Max Distance | RMSE | MAE | |
| Cyl. 1 | 3.60 | 1.50 | 3.00 | 4.00 | 2.00 | 2.70 | 0.60 | 5.40 | 2.80 | 2.20 |
| Cyl. 2 | 3.90 | 1.40 | 5.00 | 5.50 | 4.00 | 3.50 | 0.29 | 5.10 | 3.53 | 2.60 |
| Cyl. 3 | 3.90 | 2.55 | 5.10 | 4.70 | 3.00 | 4.40 | 0.10 | 5.22 | 3.56 | 2.40 |
| Cyl. 4 | 3.45 | 1.20 | 4.00 | 3.60 | 0.26 | 3.00 | 0.12 | 4.80 | 3.30 | 2.40 |
| Cyl. 5 | 5.00 | 0.80 | 4.80 | 5.40 | 4.00 | 3.20 | 2.30 | 4.90 | 4.00 | 3.20 |
| Average | 4.00 | 1.49 | 4.00 | 4.60 | 2.60 | 3.36 | 0.68 | 5.10 | 3.40 | 2.60 |
| UAV (mm) | TLS (mm) | As-Is (mm) | UAV Scaling Error (mm) | TLS Scaling Error (mm) | |
|---|---|---|---|---|---|
| P1-N to P1-S | 941.7 | 910.2 | 908.1 | 33.6 | 2.1 |
| P1-W to P1-E | 944.1 | 910.5 | 907.9 | 36.2 | 2.6 |
| P2-N to P2-S | 942.5 | 911.2 | 909.0 | 33.5 | 2.2 |
| P2-W to P2-E | 939.8 | 911.5 | 910.1 | 29.7 | 1.4 |
| Number of Iteration | P1-E to P2-W | P1-W to P2-E | ||
|---|---|---|---|---|
| UAV | TLS | UAV | TLS | |
| 1 | 5479.1 | 5479.5 | 7300.0 | 7298.9 |
| 2 | 5472.1 | 5471.0 | 7301.0 | 7293.6 |
| 3 | 5478.3 | 5479.2 | 7299.9 | 7298.6 |
| 4 | 5479.0 | 5478.7 | 7301.5 | 7301.5 |
| 5 | 5474.7 | 5476.4 | 7299.6 | 7300.5 |
| 6 | 5474.5 | 5474.2 | 7301.0 | 7298.4 |
| 7 | 5472.6 | 5473.3 | 7297.3 | 7302.0 |
| 8 | 5471.2 | 5472.4 | 7293.4 | 7301.1 |
| 9 | 5472.7 | 5472.5 | 7300.9 | 7302.3 |
| 10 | 5475.6 | 5475.4 | 7309.4 | 7302.6 |
| 11 | 5472.8 | 5472.0 | 7301.4 | 7309.0 |
| Average | 5474.8 | 5474.9 | 7300.5 | 7300.7 |
| STD | 3 | 2.9 | 3.8 | 3.7 |
| Standard error | 0.9 | 0.89 | 1.14 | 1.13 |
| MAE | 51 | 51 | 48 | 50 |
| Uncertainty in measurement | 5470 ± 4 | 5470 ± 3.5 | 7300 ± 7 | 7300 ± 7 |
| Uncertainty (%) | 0.016 | 0.016 | 0.016 | 0.016 |
| Cross-Sectional Profiles | Max Distance | Average Distance | STD | RMSE |
|---|---|---|---|---|
| Sec A-A | 15.44 | 3.11 | 4.10 | 3.61 |
| Sec B-B | 14.21 | 3.29 | 3.94 | 3.62 |
| Sec C-C | 19.79 | 7.27 | 6.97 | 7.13 |
| Sec D-D | 6.23 | 0.82 | 0.48 | 0.65 |
| Sec E-E | 17.43 | 10.17 | 4.89 | 7.53 |
| Local Modelling Method | Number of Neighboring Points | Pier | Part C | ||
|---|---|---|---|---|---|
| Average Distance (mm) | STD (mm) | Average Distance (mm) | STD (mm) | ||
| Least square plane | 6 | 2.08 | 3.83 | 5.83 | 10.03 |
| 12 | 2.41 | 4.20 | 6.61 | 10.86 | |
| Triangulation | 6 | 2.97 | 9.51 | 8.13 | 15.54 |
| 12 | 2.91 | 9.39 | 8.07 | 15.52 | |
| Quadric function | 6 | 2.18 | 4.10 | 6.16 | 10.99 |
| 12 | 2.45 | 4.41 | 6.80 | 11.56 | |
| Nearest neighbor | - | 3.08 | 9.54 | 8.24 | 15.54 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammadi, M.; Rashidi, M.; Mousavi, V.; Karami, A.; Yu, Y.; Samali, B. Quality Evaluation of Digital Twins Generated Based on UAV Photogrammetry and TLS: Bridge Case Study. Remote Sens. 2021, 13, 3499. https://doi.org/10.3390/rs13173499
Mohammadi M, Rashidi M, Mousavi V, Karami A, Yu Y, Samali B. Quality Evaluation of Digital Twins Generated Based on UAV Photogrammetry and TLS: Bridge Case Study. Remote Sensing. 2021; 13(17):3499. https://doi.org/10.3390/rs13173499
Chicago/Turabian StyleMohammadi, Masoud, Maria Rashidi, Vahid Mousavi, Ali Karami, Yang Yu, and Bijan Samali. 2021. "Quality Evaluation of Digital Twins Generated Based on UAV Photogrammetry and TLS: Bridge Case Study" Remote Sensing 13, no. 17: 3499. https://doi.org/10.3390/rs13173499
APA StyleMohammadi, M., Rashidi, M., Mousavi, V., Karami, A., Yu, Y., & Samali, B. (2021). Quality Evaluation of Digital Twins Generated Based on UAV Photogrammetry and TLS: Bridge Case Study. Remote Sensing, 13(17), 3499. https://doi.org/10.3390/rs13173499