
Design and Applications of Multi-Frequency Holographic Subsurface Radar: Review and Case Histories

 ,
,  , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Time-domain impulse radars
- Frequency-modulated continuous-wave radars
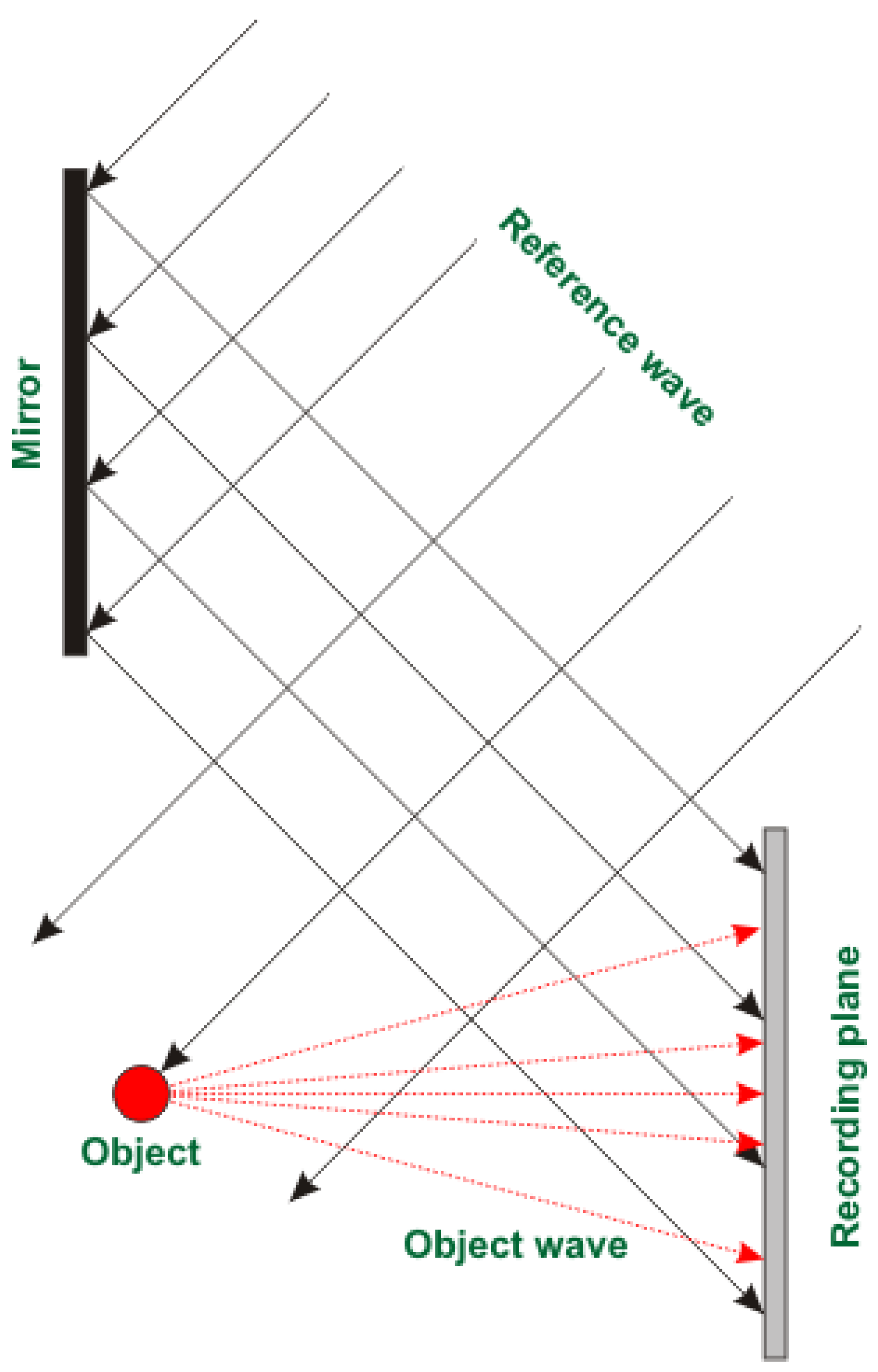
- Holographic radars
2. HSR Design and Image Reconstruction
3. Main Applications of Holographic Subsurface Radars
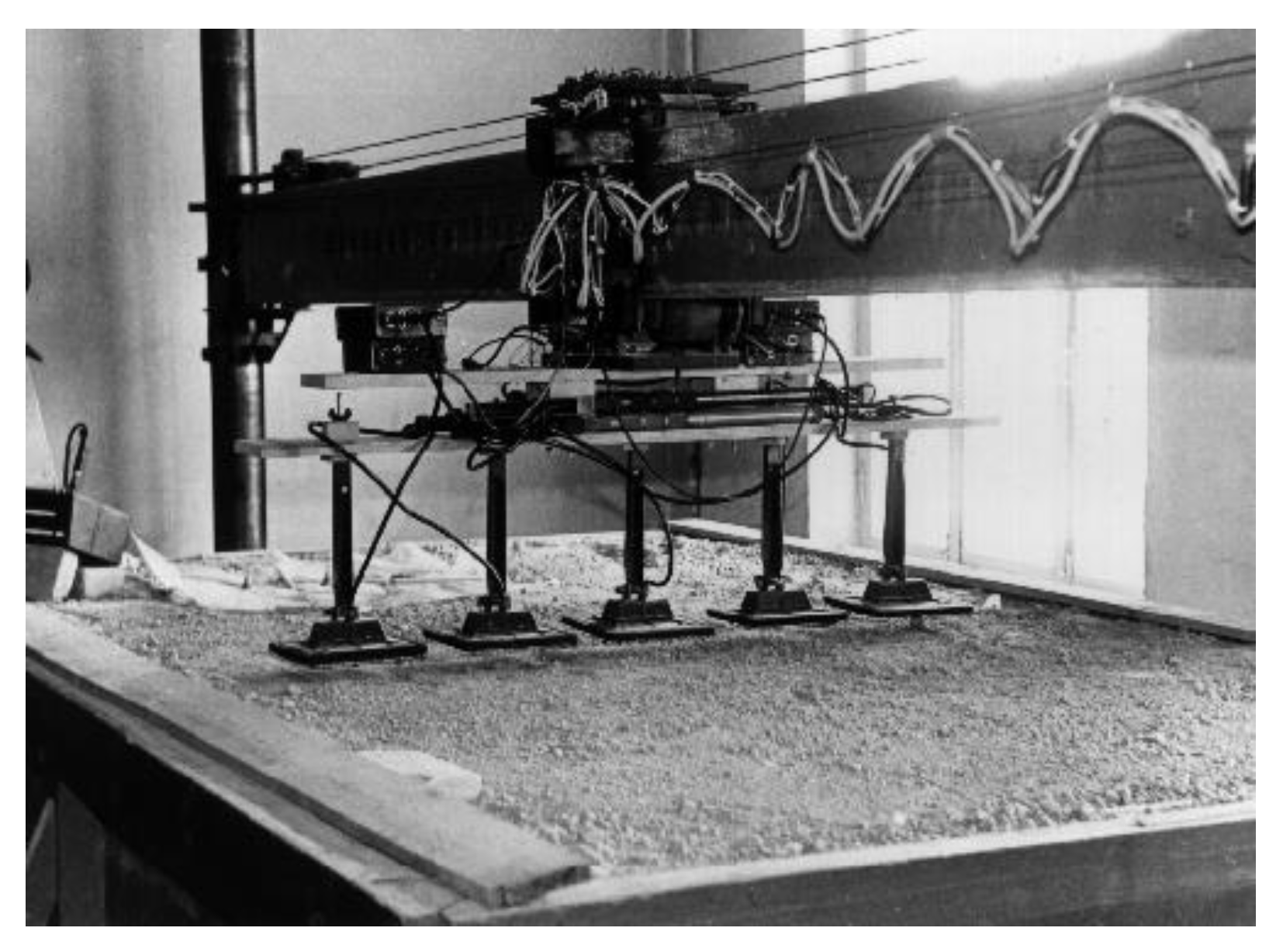
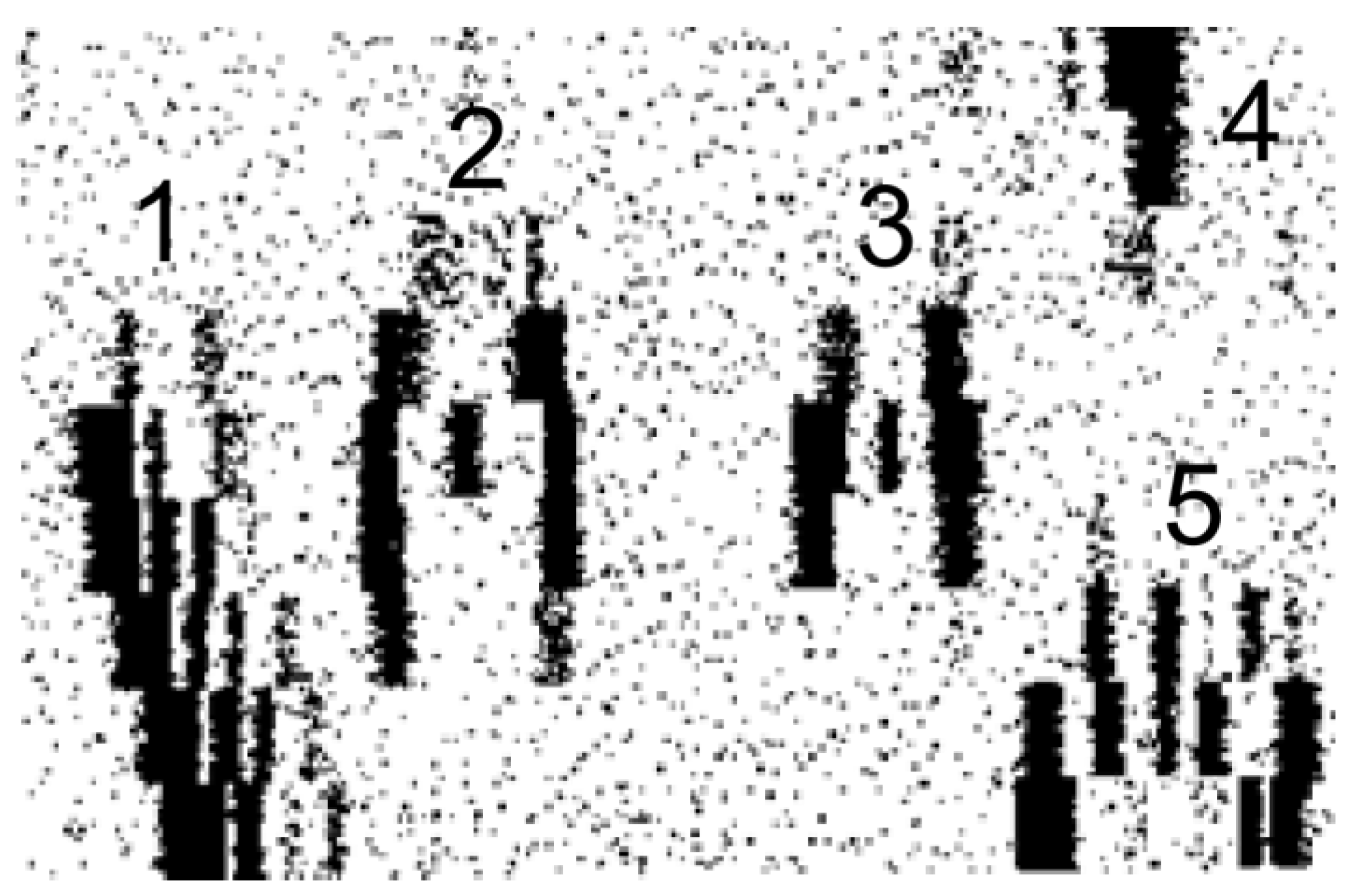
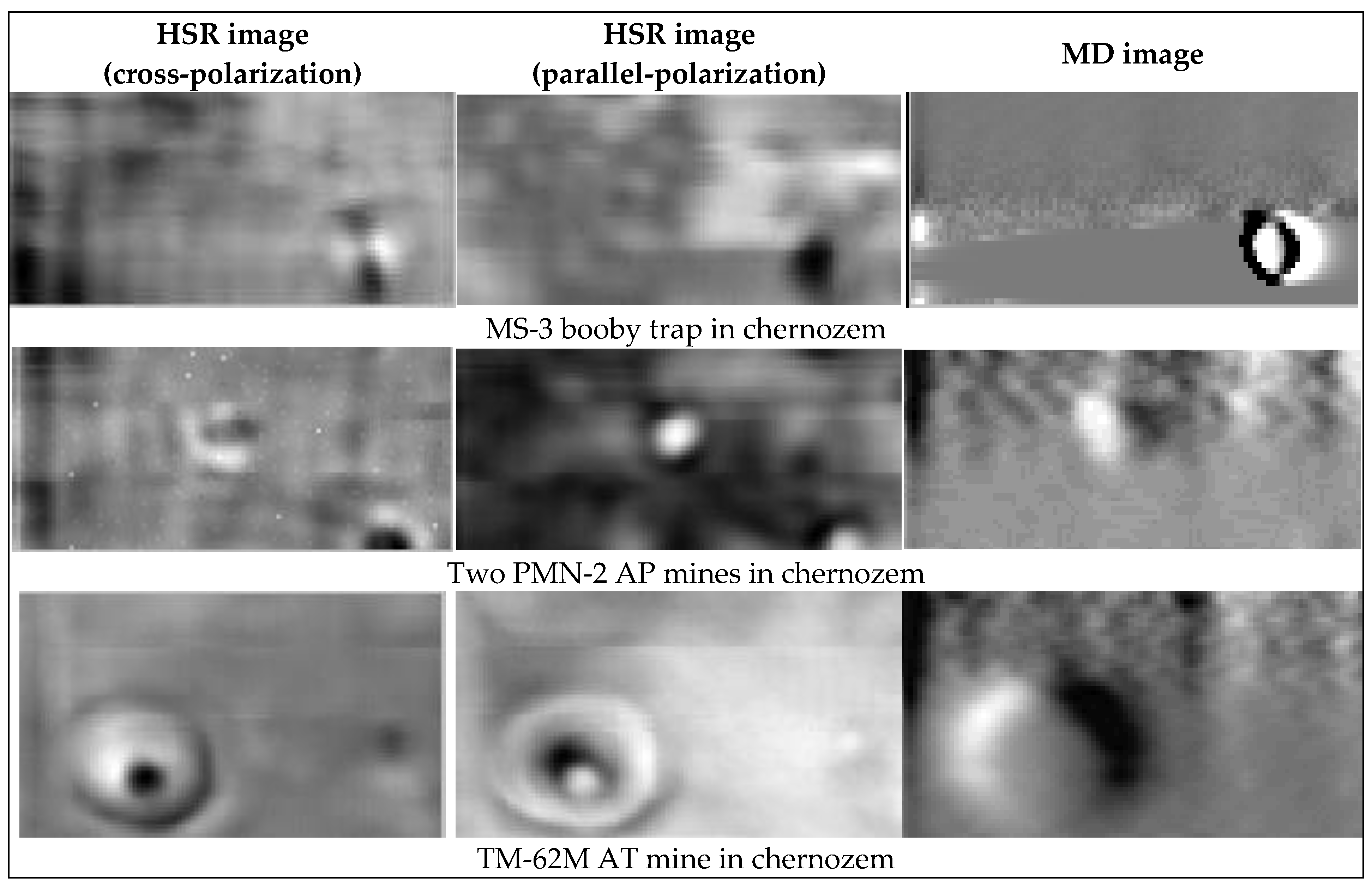
3.1. Land Mine Detection
3.2. Non-Destructive Testing of Building Structures and Composite Materials
3.3. Cultural Heritage Inspection and Diagnostics
3.4. Security
- The distance from the mannequin to the scan plane was about 45 cm.
- The frequency of VNA sweeps was 18.0 GHz to 26.5 GHz.
- The height and width of the scanned aperture were 100 cm and 90 cm, respectively.
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Finkelstein, M.I. Subsurface radar. Telecomm. Radio Eng. 1997, 32, 18–26. [Google Scholar]
- Daniels, D.J. Surface-Penetrating Radar; IEEE: London, UK, 1996. [Google Scholar]
- Finkelstein, M.I.; Kutev, V.A.; Zolotarev, V.P. Applications of Subsurface Radar in Geology; Nedra: Moscow, Russia, 1986. (In Russian) [Google Scholar]
- Doolittle, J.A. Using ground penetrating radar to increase the quality and efficiency of soil surveys. Soil Surv. Tech. 1987, 20, 11–32. [Google Scholar]
- Iizuka, K. Microwave hologram by photoengraving. Proc. IEEE 1969, 57, 813–814. [Google Scholar] [CrossRef]
- Iizuka, K.; Gregoris, L.G. Application of microwave holography in the study of the field from a radiating source. Appl. Phys. Lett. 1970, 17, 509–512. [Google Scholar] [CrossRef]
- Junkin, G.; Anderson, A.P. Limitations in microwave holographic synthetic aperture imaging over a lossy half-space. Commun. Radar Signal Process. IEEE Proc. F 1988, 135, 321–329. [Google Scholar] [CrossRef]
- Ivashov, S.I.; Razevig, V.V.; Vasiliev, I.A.; Zhuravlev, A.V.; Bechtel, T.D.; Capineri, L. Holographic Subsurface Radar of RASCAN Type: Development and Applications. IEEE J. Sel. Top. Earth Obs. Remote Sens. 2011, 4, 763–778. [Google Scholar] [CrossRef]
- Ivashov, S.I.; Razevig, V.V.; Sheyko, A.P.; Vasilyev, I.A. A Review of the Remote Sensing Laboratory’s Techniques for Humanitarian Demining. In Proceedings of the International Conference on Requirements and Technologies for the Detection, Removal and Neutralization of Landmines and UXO, EUDEM2-SCOT-2003, Brussels, Belgium, 15–18 September 2003; Volume 1, pp. 3–8. [Google Scholar]
- Song, X.J.; Su, Y.; Huang, C.L.; Lu, M.; Zhu, S.P. Landmine Detection with Holographic Radar. In Proceedings of the 16th International Conference of Ground Penetrating Radar (GPR 2016), Hong Kong, 13–16 June 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Pochanin, G.; Capineri, L.; Bechtel, T.; Ruban, V.; Falorni, P.; Crawford, F.; Ogurtsova, T.; Bossi, L. Radar Systems for Landmine Detection: Invited Paper. In Proceedings of the 2020 IEEE Ukrainian Microwave Week (UkrMW), Kharkiv, Ukraine, 21–25 September 2020; pp. 1118–1122. [Google Scholar] [CrossRef]
- Gabor, D. A new microscopic principle. Nature 1948, 161, 777–778. [Google Scholar] [CrossRef]
- Chubinsky, N.P. Possibilities of holographic methods at sounding of lossy media. In Proceedings of the 4th Russian conference Radio-Physics Methods in Remote Sensing, Murom, Russia, 30 June–3 July 2009; pp. 47–60. (In Russian). [Google Scholar]
- Collier, R.J.; Burckhardt, C.B.; Lin, L.H. Optical Holography; Academic Press: New York, NY, USA; London, UK, 1971. [Google Scholar]
- Williams, W.R. Physical Optics; The MacMillan Company: New York, NY, USA, 1911; pp. 37–39. [Google Scholar]
- Leith, E.N.; Upatnieks, J. Reconstructed wave fronts and communication theory. J. Opt. Soc. Am. 1962, 52, 1123–1130. [Google Scholar] [CrossRef]
- McMakin, D.L.; Sheen, D.M.; Griffin, J.W.; Lechelt, W.M. Extremely high-frequency holographic radar imaging of personnel and mail. In Sensors, and Command, Control, Communications, and Intelligence (C31) Technologies for Homeland Security and Homeland Defense V; Edward, M., Ed.; Carapezza, SPIE: Wayland, MA, USA, 2006; Volume 6201. [Google Scholar] [CrossRef]
- Zhuravlev, A.; Razevig, V.; Chizh, M.; Ivashov, S. Imaging of concealed objects on moving persons by creating synthetic aperture due to their natural motion. In Proceedings of the IEEE International Conference on Microwaves, Communications, Antennas and Electronic Systems (COMCAS 2017), Tel-Aviv, Israel, 13–15 November 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Razevig, V.V.; Ivashov, S.I.; Vasiliev, I.A.; Zhuravlev, A.V.; Bechtel, T.; Capineri, L. Advantages and Restrictions of Holographic Subsurface Radars. Experimental evaluation. In Proceedings of the XIII International Conference on Ground Penetrating Radar, Lecce, Italy, 21–25 June 2010; pp. 657–662. [Google Scholar] [CrossRef]
- Razevig, V.; Ivashov, S.; Chizh, M.; Zhuravlev, A.; Capineri, L. Influence of Electrical Properties of Media on Reconstruction of Microwave Holograms Recorded by Subsurface Radar. In Proceedings of the 2019 IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems (COMCAS), Tel-Aviv, Israel, 4–6 November 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Razevig, V.; Ivashov, S.; Vasiliev, I.; Zhuravlev, A. Comparison of Different Methods for Reconstruction of Microwave Holograms Recorded by the Subsurface Radar. In Proceedings of the 14th International Conference on Ground Penetrating Radar, Shanghai, China, 4–8 June 2012; pp. 335–339. [Google Scholar] [CrossRef]
- Kolandasami, A.P.; Makhmanazarov, R.M.; Kuz`menko, I.Y.; Muksunov, T.R.; Yakubov, V.P. Phase as the basis for wave vision. IOP Conf. Ser. Mater. Sci. Eng. 2019, 516, 012058. [Google Scholar] [CrossRef]
- Available online: http://www.rslab.ru/downloads/scan.avi (accessed on 29 August 2021).
- Bechtel, E.; Ivashov, S.; Bechtel, T.; Arsenyeva, E.; Zhuravlev, A.; Vasiliev, I.; Razevig, V.; Sheyko, A. Experimental determination of the resolution of the Rascan-4/4000 holographic radar system. In Proceedings of the 12th International Conference on Ground Penetrating Radar, Birmingham, UK, 16–19 June 2008; Available online: http://www.rslab.ru/downloads/bechtel_et_al.pdf (accessed on 29 August 2021).
- Liu, C.; Al Qaseer, M.T.; Zoughi, R. Influence of Antenna Pattern on Synthetic Aperture Radar Resolution for NDE Applications. In IEEE Transactions on Instrumentation and Measurement; Publisher Institute of Electrical and Electronics Engineers: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- Lu, T.; Snapp, C.; Chao, T.-H.; Thakoor, A.; Bechtel, T.; Ivashov, S.; Vasiliev, I. Evaluation of holographic subsurface radar for NDE of space shuttle thermal protection tiles. In Sensors and Systems for Space Applications; SPIE: Orlando, FL, USA; Publisher the Society of Photo-Optical Instrumentation Engineers: Bellingham, DC, USA, 2007; Volume 6555. [Google Scholar] [CrossRef]
- Ivashov, S.I.; Razevig, V.V.; Zhuravlev, A.V.; Bechtel, T.; Chizh, M.A. Comparison of Different NDT Methods in Diagnostics of Rocket Cryogenic Tanks Thermal Protection Coating. In Proceedings of the 2019 IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems (COMCAS), Tel-Aviv, Israel, 4–6 November 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Kharkovsky, S.; Zoughi, R. Microwave and millimeter wave nondestructive testing and evaluation. IEEE Instrum. Meas. Mag. 2007, 10, 26–38. [Google Scholar] [CrossRef]
- Case, J.T.; Hepburn, F.L.; Zoughi, R. Inspection of Spray on Foam Insulation (SOFI) Using Microwave and Millimeter Wave Synthetic Aperture Focusing and Holography. In Proceedings of the 2006 IEEE Instrumentation and Measurement Technology Conference Proceedings, Sorrento, Italy, 24–27 April 2006. [Google Scholar] [CrossRef]
- Capineri, L.; Falorni, P.; Becthel, T.; Ivashov, S.; Razevig, V.; Zhuravlev, A. Water detection in thermal insulating materials by high resolution imaging with holographic radar. Meas. Sci. Technol. 2017, 28, 1–6. [Google Scholar] [CrossRef]
- Zhang, X.; Liang, J.; Wang, N.; Chang, T.; Guo, Q.; Cui, H. Broadband Millimeter-Wave Imaging Radar-Based 3-D Holographic Reconstruction for Nondestructive Testing. IEEE Trans. Microw. Theory Tech. 2020, 68, 1074–1085. [Google Scholar] [CrossRef]
- Amineh, R.K.; Ravan, M.; Sharma, R. Nondestructive Testing of Nonmetallic Pipes Using Wideband Microwave Measurements. IEEE Trans. Microw. Theory Tech. 2020, 68, 1763–1772. [Google Scholar] [CrossRef]
- Liu, C.; Tayeb, A.Q.M.; Bao, F.S.; Zoughi, R. Target Depth-Based Adaptive Scanning in Microwave Synthetic Aperture Radar Imaging for NDE Applications; Passive and Active Millimeter-Wave Imaging XXIV; SPIE: Orlando, FL, USA, 2021; Volume 11745. [Google Scholar] [CrossRef]
- Och, A.; Patrick, A.H.; Schuster, S.; Scheiblhofer, S.; Zankl, D.; Pathuri-Bhuvana, V.; Weigel, R. High-Resolution Millimeter-Wave Tomography System for Nondestructive Testing of Low-Permittivity Materials. IEEE Trans. Microw. Theory Tech. 2021, 69, 1105–1113. [Google Scholar] [CrossRef]
- Ivashov, S.I.; Makarenkov, V.I.; Razevig, V.V.; Sablin, V.N.; Sheyko, A.P.; Vasiliev, I.A. Concrete floor inspection with help of subsurface radar. In Proceedings of the Eight International Conference on Ground-Penetrating Radar, GPR’2000, Queensland, Australia, 23–26 May 2000; pp. 552–555. [Google Scholar] [CrossRef]
- Capineri, L.; Falorni, P.; Borgioli, G.; Bulletti, A.; Valentini, S.; Ivashov, S.; Zhuravlev, A.; Razevig, V.; Vasiliev, I.; Paradiso, M.; et al. Application of the RASCAN holographic radar to cultural heritage inspections. Archaeol. Prospect. 2009, 16, 218–230. [Google Scholar] [CrossRef]
- Razevig, V.V.; Ivashov, S.I.; Sheyko, A.P.; Vasilyev, I.A.; Zhuravlev, A.V. An example of holographic radar using at restoration works of historical building. Prog. Electromagn. Res. Lett. 2008, 1, 173–179. [Google Scholar] [CrossRef][Green Version]
- Ivashov, S.; Bechtel, T.; Razevig, V.; Capineri, L.; Inagaki, M. A proposed radar method for non-destructive investigation of Egyptian pyramids. Insight 2021, 63, 12–19. [Google Scholar] [CrossRef]
- Vasiliev, I.A.; Ivashov, S.I.; Makarenkov, V.I.; Sablin, V.N.; Sheyko, A.P. RF Band High Resolution Sounding of Building Structures and Works. IEEE Aerosp. Electron. Syst. Mag. 1999, 14, 25–28. [Google Scholar] [CrossRef][Green Version]
- Bossi, L.; Falorni, P.; Windsor, C.; Zandonai, F.; Bizzarini, F.; Delfino, M.; Giusberti, L.; Bechtel, T.; Chizh, M.; Ivashov, S.; et al. The imaging of subsurface crocodile remains in a limestone slab using holographic radar. In Proceedings of the GPR 2020—18th International Conference on Ground Penetrating Radar, Golden, CO, USA, 14–19 June 2020; pp. 6–9. [Google Scholar] [CrossRef]
- Ivashov, S.; Razevig, V.; Zhuravlev, A.; Chizh, M.; Bechtel, T.; Capineri, L.; Inagaki, M. MW Holographic Imaging System for Detection of Hidden Dinosaur Tracks. In Proceedings of the 2017 Progress In Electromagnetics Research Symposium—Spring (PIERS), St. Petersburg, Russia, 22–25 May 2017; pp. 3241–3246. [Google Scholar] [CrossRef]
- Vohra, D.; Bechtel, T.; Thomas, R.D.K.; Windsor, C.; Ivashov, S.; Capineri, L.; Inagaki, M.; Van Scyoc, R. A test of holographic radar for detection of hidden vertebrate tracks and trackways. In Proceedings of the 2015 8th International Workshop on Advanced Ground Penetrating Radar (IWAGPR), Florence, Italy, 7–10 July 2015; pp. 1–4. [Google Scholar]
- Bechtel, T.; Capineri, L.; Windsor, C.; Inagaki, M.; Ivashov, S. Comparison of ROC curves for landmine detection by holographic radar with ROC data from other methods. In Proceedings of the 2015 8th International Workshop on Advanced Ground Penetrating Radar (IWAGPR), Florence, Italy, 7–10 July 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Borgioli, G.; Bossi, L.; Capineri, L.; Falorni, P.; Bechtel, T.; Crawford, F.; Inagaki, M.; Pochanin, G.; Ruban, V.; Varyanitza-Roschupkina, L.; et al. A Hologram Reconstruction Algorithm for Landmine Recognition and Classification Based on Microwave Holographic Radar Data. In Proceedings of the 2018 Progress in Electromagnetics Research Symposium (PIERS-Toyama), Toyama, Japan, 1–4 August 2018; pp. 1938–1944. [Google Scholar] [CrossRef]
- Ivashov, S.I.; Sablin, V.N.; Vasilyev, I.A. Wide-span systems of mine detection. IEEE Aerosp. Electron. Syst. Mag. 1999, 14, 6–8. [Google Scholar] [CrossRef]
- Ivashov, S.I.; Sablin, V.N.; Vasilyev, I.A.; Nikiforov, N.V.; Minkov, V.E. Wide-span systems of mine detection. In Proceedings of the 1998 Second International Conference on the Detection of Abandoned Land Mines (IEE Conf. Publ. No. 458), Edinburgh, UK, 12–14 October 1998; pp. 78–80. [Google Scholar] [CrossRef]
- Zhuravlev, A.; Bugaev, A.; Ivashov, S.; Razevig, V.; Vasiliev, I. Microwave holography in detection of hidden objects under the surface and beneath clothes. In Proceedings of the 2011 XXXth URSI General Assembly and Scientific Symposium, Istanbul, Turkey, 13–20 August 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Ahmed, S.S. Personnel screening with advanced multistatic imaging technology. In Passive and Active Millimeter-Wave Imaging XVI; SPIE: Orlando, FL, USA, 2013. [Google Scholar] [CrossRef]
- Meng, Y.; Lin, C.; Zang, J.; Qing, A.; Nikolova, N.K. Ka Band Holographic Imaging System Based on Linear Frequency Modulation Radar. Sensors 2020, 20, 6527. [Google Scholar] [CrossRef]
- Sheen, D.M.; McMakin, D.L.; Hall, T.E. Three-dimensional millimeter-wave imaging for concealed weapon detection. IEEE Trans. Microw. Theory Tech. 2001, 49, 1581–1592. [Google Scholar] [CrossRef]
- Zhuravlev, A.; Razevig, V.; Chizh, M.; Dong, G.; Hu, B. A New Method for Obtaining Radar Images of Concealed Objects in Microwave Personnel Screening Systems. IEEE Trans. Microw. Theory Tech. 2020, 69, 357–364. [Google Scholar] [CrossRef]
- David, M.; Sheen, R.; Trevor Clark, J.; Tedeschi, A.; Jones, M.; Hall, T.E. High-Resolution 3D Microwave Imaging of a Moving Target Using Optical Motion Capture; Passive and Active Millimeter-Wave Imaging XXII; SPIE: Orlando, FL, USA, 2019. [Google Scholar] [CrossRef]
- Gao, J.; Qin, Y.; Deng, B.; Wang, H.; Li, X. A Novel Method for 3-D Millimeter-Wave Holographic Reconstruction Based on Frequency Interferometry Techniques. IEEE Trans. Microw. Theory Tech. 2018, 66, 1579–1596. [Google Scholar] [CrossRef]
- Bechtel, T.; Capineri, L.; Falorni, P.; Inagaki, M.; Zhuravlev, A.; Razevig, V.; Ivashov, S.; Windsor, C. Detection of Latent Damage from Insect Activity in Wooden Structures through the Use of Holographic Subsurface Radar. In Proceedings of the PIERS, Marrakesh, Morocco, 20–23 March 2011; p. 95. [Google Scholar]
- Anishchenko, L.N.; Alborova, I.L.; Chizh, M.A.; Zhuravlev, A.V. Microwave imaging of biological tissue phantom in different frequency ranges. In Proceedings of the 2016 Progress in Electromagnetic Research Symposium (PIERS), Shanghai, China, 8–11 August 2016; pp. 4639–4643. [Google Scholar] [CrossRef]
- Huang, C.; Liu, T.; Lu, M.; Su, Y. Holographic subsurface imaging for medical detection. In Proceedings of the 15th International Conference on Ground Penetrating Radar, Brussels, Belgium, 30 June–4 July 2014; pp. 651–654. [Google Scholar] [CrossRef]
- Flores-Tapia, D.; Maizlish, O.; Alabaster, C.M.; Pistorius, S. A holographic reconstruction method for circular multistatic subsurface radar. In Proceedings of the 2012 International Waveform Diversity & Design Conference (WDD), Kauai, HI, USA, 22–27 January 2012; pp. 142–145. [Google Scholar] [CrossRef]
- Wu, H.; Ravan, M.; Amineh, R.K. Holographic Near-Field Microwave Imaging With Antenna Arrays in a Cylindrical Setup. IEEE Trans. Microw. Theory Tech. 2021, 69, 418–430. [Google Scholar] [CrossRef]
- Vasiliev, I.A.; Ivashov, A.I.; Ivashov, S.I.; Makarenkov, V.I.; Sablin, V.N.; Sheiko, A.P. Subsurface radar, Russian Patent # 2158015, 20.10.2000, RU 2 158 015 C2. Reference in WoS. Available online: http://apps.webofknowledge.com/full_record.do?colName=DIIDW&recordID=2001101210&log_event=no&search_mode=GeneralSearch&qid=2&log_event=yes&product=UA&SID=C6FUAJCOAHXc12dYwqC&viewType=fullRecord&doc=3&page=1 (accessed on 27 August 2021).
- Bossi, L.; Falorni, P.; Bartolini, A.; Capineri, L. Characterization of a 2 GHz holographic radar antenna for detection of subsurface targets. In Proceedings of the 18th International Conference on Ground Penetrating Radar, Golden, CO, USA, 14–19 June 2020; pp. 324–327. [Google Scholar] [CrossRef]
- Ivashov, S.I.; Capineri, L.; Bechtel, T.D. Holographic Subsurface Radar Technology and Applications, in Book UWB Radar. Applications and Design; James, J.T., Ed.; CRC Press: Boca Raton, FL, USA, 2012; pp. 421–444. ISBN 978-1-4200-8986-8. [Google Scholar]
- Available online: http://www.rslab.ru/downloads/ptm3.avi (accessed on 28 August 2021).
- Razevig, V.V.; Vasil’ev, I.A.; Ivashov, A.I.; Ivashov, S.I.; Makarenkov, V.I. Method of Obtaining Radio Holograms of Subsurface Objects. Russian Patent #2482518, 1 November 2011. Available online: http://apps.webofknowledge.com/full_record.do?colName=DIIDW&recordID=2013H61403&log_event=no&search_mode=GeneralSearch&qid=9&log_event=yes&product=UA&SID=F1YM3JgCMcXP2VTvp7o&viewType=fullRecord&doc=2&page=1 (accessed on 27 August 2021).
- Available online: http://www.rslab.ru/english/product (accessed on 27 August 2021).
- Zhuravlev, A.; Ivashov, S.; Vasiliev, I.; Razevig, V. Processing of Holographic Subsurface Radar Data. In Proceedings of the 14th International Conference on Ground Penetrating Radar, Shanghai, China, 4–8 June 2012; pp. 68–71. [Google Scholar] [CrossRef]
- Ivashov, S.; Razevig, V.; Vasiliev, I.; Bechtel, T.; Capineri, L. Holographic subsurface radar for diagnostics of cryogenic fuel tank thermal insulation of space vehicles. NDT Int. 2015, 69, 48–54. [Google Scholar] [CrossRef]
- Zhuravlev, V.; Ivashov, S.I.; Razevig, V.V.; Vasiliev, I.A.; Bugaev, A.S. Holographic subsurface radar RASCAN-5. In Proceedings of the 2013 7th International Workshop on Advanced Ground Penetrating Radar, Nantes, France, 2–5 July 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Goodman, J.V. Introduction to Fourier Optics; McGraw-Hill: New York, NY, USA, 2005. [Google Scholar]
- Tikhonov, A.N. Solutions of Ill-Posed Problems; Winston: New York, NY, USA, 1977. [Google Scholar]
- Popov, A.V.; Kopeikyn, V.V.; Vinogradov, V.A.; Zapunidi, S.A. Reconstruction algorithms and experiments with a prototype of holographic subsurface radar. In Proceedings of the 4th International Conference on Antenna Theory and Techniques (Cat. No.03EX699), Sevastopol, Ukraine, 9–12 September 2003; Volume 2, pp. 561–563. [Google Scholar] [CrossRef]
- Popov, A.; Prokopovich, I.; Edemskii, D. Experimental implementation of microwave subsurface holography. In Proceedings of the 2016 Days on Diffraction (DD), St. Petersburg, Russia, 27 June–1 July 2016; pp. 340–345. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiao, Z.; Wu, L.; Lu, X.; Wang, Y. Deep learning for subsurface penetrating super-resolution imaging. In Proceedings of the 2017 10th UK-Europe-China Workshop on Millimetre Waves and Terahertz Technologies (UCMMT), Liverpool, UK, 11–13 September 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Sukhanov, D.; Zavyalova, K. Three-dimensional non-contact subsurface radiotomography through a non-planar interface between media. In Proceedings of the 15th International Conference on Ground Penetrating Radar, Brussels, Belgium, 30 June–4 July 2014; pp. 663–667. [Google Scholar] [CrossRef]
- Razevig, V.V.; Zhuravlev, A.V.; Bugaev, A.S.; Chizh, M.A.; Ivashov, S.I. Imaging under irregular surface using microwave holography. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium—Fall (PIERS—FALL), Singapore, 19–22 November 2017; pp. 172–177. [Google Scholar] [CrossRef]
- Qin, T.; Bossi, L.; Bartolini, A.; Falorni, P.; Giannelli, P.; Zhao, Y.; Capineri, L. Influence Analysis of Uneven Surface on Landmine Detection Using Holographic Radar. In Proceedings of the 2018 Progress in Electromagnetics Research Symposium (PIERS-Toyama), Toyama, Japan, 1–4 August 2018. [Google Scholar] [CrossRef]
- Available online: https://www.geophysical.com/about-gssi (accessed on 27 August 2021).
- Available online: https://www.guidelinegeo.com/ (accessed on 27 August 2021).
- Ivashov, S.I.; Makarenkov, V.I.; Razevig, V.V.; Sablin, V.N.; Sheyko, A.P.; Vasiliev, I.A. Remote Control Mine Detection System with GPR and Metal Detector. In Proceedings of the Eight International Conference on Ground-Penetrating Radar, GPR’2000, Queensland, Australia, 23–26 May 2000; pp. 36–39. [Google Scholar] [CrossRef]
- Amineh, R.K.; Nikolova, N.K.; Ravan, M. Real Time Three Dimensional Imaging of Dielectric Bodies Using Microwave/Millimeter Wave Holography. In IEEE Press Series on RF and Microwave Technology; IEEE Press: Hoboken, NJ, USA, 2019; ISBN 978-1-119-53886-8. [Google Scholar] [CrossRef]
- Landmine Monitor. 2020. Available online: https://www.the-monitor.org/en-gb/reports/2020/landmine-monitor-2020.aspx (accessed on 27 August 2021).
- Joynt, V.P. Mobile metal detection: A field perspective. In Proceedings of the Second International Conference on the Detection of Abandoned Land Mines, MD’98, Edinburgh, UK, 12–16 October 1998; pp. 14–15. [Google Scholar]
- Sato, M. Dual Sensor ALIS for Humanitarian Demining and its Evaluation Test in Mine Fields in Croatia. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008. [Google Scholar] [CrossRef]
- Jane’s Mines and Mine Clearance Edition by Colin King; Janes Information Group: Coulston, UK, 1996; ISBN 978-0710618030.
- Daniels, D.; Braunstein, J.; Nevard, M. Using MINEHOUND in Cambodia and Afghanistan. J. ERW Mine Action 2014, 18, 14. [Google Scholar]
- Ivashov, S.; Razevig, V.; Vasilyev, I.; Zhuravlev, A.; Bechtel, T.; Capineri, L. The Holographic Principle in Subsurface Radar Technology. In Proceedings of the International Symposium to Commemorate the 60th Anniversary of the Invention of Holography, Springfield, MA, USA, 27–29 October 2008; pp. 183–197. [Google Scholar]
- Windsor, C.; Capineri, L.; Bechtel, T.D. Buried object classification using holographic radar. Insight-Non-Destr. Test. Cond. Monit. 2012, 54, 331–339. [Google Scholar] [CrossRef]
- Bechtel, T.; Pochanin, G.; Truskavetsky, S.; Dimitri, M.; Ruban, V.; Orlenko, O.; Byndych, T.; Sherstyuk, A.; Viatkin, K.; Crawford, F.; et al. Terrain Analysis in Eastern Ukraine and the Design of a Robotic Platform Carrying GPR Sensors for Landmine Detection. In Proceedings of the 2018 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Capineri, L.; Arezzini, I.; Calzolai, M.; Windsor, C.; Inagaki, M.; Bechtel, T.; Ivashov, S. High resolution imaging with a holographic radar mounted on a robotic scanner. In Proceedings of the Electromagnetics Research Symposium Proceedings, Stockholm, Sweden, 12–15 August 2013. [Google Scholar]
- Bossi, L.; Falorni, P.; Pochanin, G.; Ruban, V.; Ogurtsova, T.; Crawford, F.; Bechtel, T.; Capineri, L. Detection of targets from radar tracks of the UWB-GPR 1Tx+ 4Rx on the mobile platform. In Proceedings of the 18th International Conference on Ground Penetrating Radar, Golden, CO, USA, 14–19 June 2020; pp. 448–451. [Google Scholar] [CrossRef]
- Jonard, F.; Weihermüller, L.; Vereecken, H.; Lambot, S. Accounting for soil surface roughness in the inversion of ultrawideband off-ground GPR signal for soil moisture retrieval. Geophysics 2012, 77, H1–H7. [Google Scholar] [CrossRef]
- Altuncu, Y.; Akduman, I.; Yapar, A. Detecting and locating dielectric objects buried under a rough interface. IEEE Geosci. Remote Sens. Lett. 2007, 4, 251–255. [Google Scholar] [CrossRef]
- Razevig, V.; Zhuravlev, A.; Chizh, M.; Ivashov, S.; Bugaev, A. Hand-held Radar with Video Positioning System for Microwave Imaging. In Proceedings of the The 38th PIERS, St Petersburg, Russia, 22–25 May 2017; pp. 3052–3055. [Google Scholar] [CrossRef]
- Zhuravlev, A.; Razevig, V.; Ivashov, S.; Skrebkov, A.; Alekseev, V. On the Use of Microwave Holography to Detect Surface Defects of Rails and Measure the Rail Profile. Sensors 2019, 19, 1376. [Google Scholar] [CrossRef]
- Zoughi, R.; Huber, C.; Qaddoumi, N.; Ranu, E.; Otashevich, V.; Mirshahi, R.; Ganchev, S.; Johnson, T. Real-time and on-line near-field microwave inspection of surface defects in rolled steel. In Proceedings of the 1997 Asia-Pacific Microwave Conference, Hong Kong, China, 2–5 December 1997; pp. 1081–1084. [Google Scholar] [CrossRef]
- Gao, Y.; Ghasr, M.T.; Ying, K.; Dvorsky, M.; Boots, A.; Zoughi, R.; Palmer, D. Millimeter Wave Differential Probe System for Surface Crack Detection in Painted Aircraft Fuselage. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Auckland, New Zealand, 20–23 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Ghasr, M.T.; LePape, Y.; Scott, D.B.; Zoughi, R. Holographical Microwave Imaging of Corroded Steel Bars in Concrete. Am. Concr. Inst. (ACI) Mater. J. 2015, 112, 115–124. [Google Scholar] [CrossRef]
- Available online: http://www.rslab.ru/english/project/mirascan/ (accessed on 28 August 2021).
- Ivashov, S.; Razevig, V.; Sheyko, A.; Vasilyev, I.; Bechtel, T. Holographic Radar as a Tool for Non-Destructive Evaluation of Structural Materials. In Proceedings of the 2005 SEM Annual Conference & Exposition on Experimental and Applied Mechanics, Portland, ON, USA, 7–9 June 2005. [Google Scholar]
- NASA. Columbia Accident Investigation Board Report; Government Printing Office: Washington, DC, USA, 2003; Available online: http://s3.amazonaws.com/akamai.netstorage/anon.nasa-global/CAIB/CAIB_lowres_full.pdf (accessed on 28 August 2021).
- Gofin, M.Y. Heat Resisting and Thermal Protecting Systems of Reusable Space Ships; Mir: Moscow, Russian, 2003; p. 672. [Google Scholar]
- Aviation Week & Space Technology; Informa Plc.: New York, NY, USA, 2003; p. 31. Available online: https://aviationweek.com/AWST (accessed on 28 August 2021).
- Aviation Week & Space Technology; Informa Plc.: New York, NY, USA, 2003; pp. 27–28. Available online: https://aviationweek.com/AWST (accessed on 28 August 2021).
- Aviation Week & Space Technology; Informa Plc.: New York, NY, USA, 2004; p. 58. Available online: https://aviationweek.com/AWST (accessed on 28 August 2021).
- Ivashov, S.I.; Vasiliev, I.A.; Bechtel, T.D.; Snapp, C. Comparison between impulse and holographic subsurface radar for NDT of space vehicle structural materials. In Proceedings of the Progress in Electromagnetics Research Symposium, Beijing, China, 26–30 March 2007; pp. 1816–1819. [Google Scholar]
- Ivashov, S.I.; Razevig, V.V.; Bechtel, T.D.; Vasiliev, I.A.; Capineri, L.; Zhuravlev, A.V. Microwave Holography for NDT of Dielectric Structures. In Proceedings of the IEEE International Conference on Microwaves, Communications, Antennas and Electronic Systems (COMCAS 2015), Tel-Aviv, Israel, 2–4 November 2015. [Google Scholar] [CrossRef]
- Ivashov, S.; Zhuravlev, A.; Chizh, M.; Razevig, V. High resolution MW holographic system for NDT of dielectric materials and details. In Proceedings of the 2016 16th International Conference on Ground Penetrating Radar (GPR), Hong Kong, China, 13–16 June 2016. [Google Scholar] [CrossRef]
- Chizh, M.A.; Zhuravlev, A.V.; Razevig, V.V.; Ivashov, S.I. Experimental Validation of Sparse Sensing Technique in Subsurface Microwave Holography. In Proceedings of the PIERS, Shanghai, China, 8–11 August 2016; pp. 1734–1738. [Google Scholar] [CrossRef]
- Ivashov, S.; Zhuravlev, A.; Razevig, V.; Chizh, M.; Bechtel, T.; Capineri, L.; Thomas, B. Frequency Influence in Microwave Subsurface Holography for Composite Materials Testing. In Proceedings of the 17th International Conference on Ground Penetrating Radar, GPR 2018, Rapperswil, Switzerland, 18–21 June 2018; pp. 98–103. [Google Scholar] [CrossRef]
- Ivashov, S.I.; Bugaev, A.S.; Zhuravlev, A.V.; Razevig, V.V.; Chizh, M.A.; Ivashov, A.I. Holographic Subsurface Radar Technique for Nondestructive Testing of Dielectric Structures. Tech. Phys. 2018, 63, 260–267. [Google Scholar] [CrossRef]
- Chizh, M.; Zhuravlev, A.; Razevig, V.; Ivashov, S. Detection of Water Inclusions in Honeycomb Composite Products by a Holographic Radar. In Proceedings of the 2019 IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems (COMCAS), Tel-Aviv, Israel, 4–6 November 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Case, J.T.; Kharkovsky, S.; Zoughi, R.; Steffes, G.; Hepburn, F.L. Millimeter Wave Holographical Inspection of Honeycomb Composites. In Proceedings of the AIP Conference, Incheon, Korea, 18–20 May 2018; pp. 970–975. [Google Scholar] [CrossRef]
- Mazzinghi, A.; Freni, A.; Capineri, L. A microwave non-destructive testing method for controlling polymeric coating of metal layers in industrial products. NDT Int. 2019, 102, 207–217. [Google Scholar] [CrossRef]
- Ur Rahman, M.S.; Haryono, A.; Abou-Khousa, M.A. Microwave Non-destructive Evaluation of Glass Reinforced Epoxy and High Density Polyethylene Pipes. J. Nondestruct. Eval. 2020, 39, 26. [Google Scholar] [CrossRef]
- Abou-Khousa, M.A.; Ryley, A.; Kharkovsky, S.; Zoughi, R.; Daniels, D.; Kreitinger, N.; Steffes, G. Comparison of X-Ray, Millimeter Wave, Shearography and Through-Transmission Ultrasonic Methods for Inspection of Honeycomb Composites. AIP Conf. Proc. 2007, 894, 999. [Google Scholar] [CrossRef]
- Capineri, L.; Falorni, P.; Ivashov, S.; Zhuravlev, A.; Vasiliev, I.; Razevig, V.; Bechtel, T.; Stankiewicz, G. Combined holographic subsurface radar and infrared thermography for diagnosis of the conditions of historical structures and artworks. Near Surf. Geophys. 2010, 8, 355–364. [Google Scholar] [CrossRef]
- Ivashov, S.; Capineri, L.; Bechtel, T.; Razevig, V.; Zhuravlev, A.; Falorni, P. Use of holographic subsurface radar analysis in the preservation and restoration of cultural heritage objects. Surf. Topogr. Metrol. Prop. 2019, 7, 045017. [Google Scholar] [CrossRef]
- Capineri, L.; Zandonai, F.; Inagaki, M.; Razevig, V.; Ivashov, S.; Windsor, C.; Bechtel, T. RASCAN holographic radar for detecting and characterizing dinosaur tracks. In Proceedings of the 2013 7th International Workshop on Advanced Ground-Penetrating Radar, Nantes, France, 2–5 July 2013; pp. 71–76. [Google Scholar] [CrossRef]
- Inagaki, M.; Bechtel, T.; Capineri, L.; Ivashov, S.; Windsor, C. A small difference of permittivity observed in a holographic radar image of dinosaur footprints. In Conference: Society of Exploration Geophysics Japan; Lapan: Tokyo, Japen, 2013; pp. 117–120. (In Japanes) [Google Scholar]
- Galton, P.M.; Farlow, J.O. Dinosaur State Park, Connecticut, USA: History, footprints, trackways exhibits. Zubia 2003, 21, 129–174. [Google Scholar]
- Zhuravlev, A.; Ivashov, S.; Razevig, V.; Vasiliev, I. Inverse synthetic aperture radar imaging for concealed object detection on a naturally walking person. In Proceedings of the SPIE Symposium on Defense and Security, Radar Sensor Technology XVIII Conference, Baltimore, MD, USA, 5–7 May 2014; Volume 9074. [Google Scholar] [CrossRef]
- ProVision® Imaging. 2014. Available online: https://www.leidos.com/sites/g/files/zoouby166/files/2020-07/FS-Leidos-Provision2.pdf (accessed on 27 August 2021).
- People Screening with Automatic Detection Eqo, Producer Smiths Detection. Available online: https://www.smithsdetection.com/products/eqo/ (accessed on 27 August 2021).






































Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivashov, S.I.; Capineri, L.; Bechtel, T.D.; Razevig, V.V.; Inagaki, M.; Gueorguiev, N.L.; Kizilay, A. Design and Applications of Multi-Frequency Holographic Subsurface Radar: Review and Case Histories. Remote Sens. 2021, 13, 3487. https://doi.org/10.3390/rs13173487
Ivashov SI, Capineri L, Bechtel TD, Razevig VV, Inagaki M, Gueorguiev NL, Kizilay A. Design and Applications of Multi-Frequency Holographic Subsurface Radar: Review and Case Histories. Remote Sensing. 2021; 13(17):3487. https://doi.org/10.3390/rs13173487
Chicago/Turabian StyleIvashov, Sergey I., Lorenzo Capineri, Timothy D. Bechtel, Vladimir V. Razevig, Masaharu Inagaki, Nikolay L. Gueorguiev, and Ahmet Kizilay. 2021. "Design and Applications of Multi-Frequency Holographic Subsurface Radar: Review and Case Histories" Remote Sensing 13, no. 17: 3487. https://doi.org/10.3390/rs13173487
APA StyleIvashov, S. I., Capineri, L., Bechtel, T. D., Razevig, V. V., Inagaki, M., Gueorguiev, N. L., & Kizilay, A. (2021). Design and Applications of Multi-Frequency Holographic Subsurface Radar: Review and Case Histories. Remote Sensing, 13(17), 3487. https://doi.org/10.3390/rs13173487